Embed Size (px)
Citation preview
Advanced Signal Processing inCommunications
Lecture 2
MortenJeppesen& JoachimDahl
{mje,jda}@cpk.auc.dk
DICOM, Aalborg University
DICOM 2001– p.1/26

Minimum Variance Estimation
DICOM 2001– p.2/26

Problem formulationRecall the linear model:
� � ��� � �
where � is complex white Gaussian. It is critical that
�
has full column rank. We wish to obtain the estimate of �
as the solution to
�� � � � �� � � ��� � � � �
without any restrictions or prior knowledge of � .
This is a maximum-likelihood problem.
For the linear model, this coincides with aleast-squares solution.
We will follow the least-squares approach.DICOM 2001– p.3/26

Complex scalar and vector differentiationFor complex scalar
� � � � � �
, we define complexdifferentiation: ��
� � � ��
��� � � � � �� �
Vector-differentiation is defined as:
� ��� � � �� ��� ! ! !
� �� �#"
$
With these definitions it is straightforward to show that
�% & �� � � % '
� � & %�� � (
�� &*) �� � � +) � , '
DICOM 2001– p.4/26

Least-squares solution
We wish to find the (global) minimum of
� � � � � ��� � �:
� � + �� ��� , - + �� � � ,
� � - ��� � - � � � � - � - � � � - � - ���
Applying the three rules from before, we get
���� � � + � - � , . � + � - ��� , .!
The global minimizer
�� is obtained by equating
/0 / � tozero:
�� � + � - � ,21 3 � - �
DICOM 2001– p.5/26

The pseudo-inverseLet
)
be an arbitrary 4 56 matrix with rank 7. We haveseen that
) � � % only has a solution if
% 8 � +) ,.
If
) � 9: ; -
, then the pseudo-inverse (of dimensions6 5 4) is defined as
) < � ; : < 9 -where
: < � = � � + 3>? ! ! ! 3>A@ B ! ! ! B , 8 C D EF
. In terms ofthe pseudo-inverse, the LS solution is
�� � ) < %
If � G +) , �6 then the pseudo-inverse is given as) < � +) -�) ,21 3 ) -!
DICOM 2001– p.6/26

Applications to channel estimation
DICOM 2001– p.7/26

Signal modelRecall the FIR-filter model:
HIJ" K L IJ" K M IJ" KN I " K
The output of the filter is
O P6 Q �R
S�T UV P6 � W QX P W Q �2Y P6 Q
where V P6 Q
is the known transmitted signal (we assume
V P6 Q � B
for6 Z B
) and we wish to estimate
X P6 Q
.
DICOM 2001– p.8/26
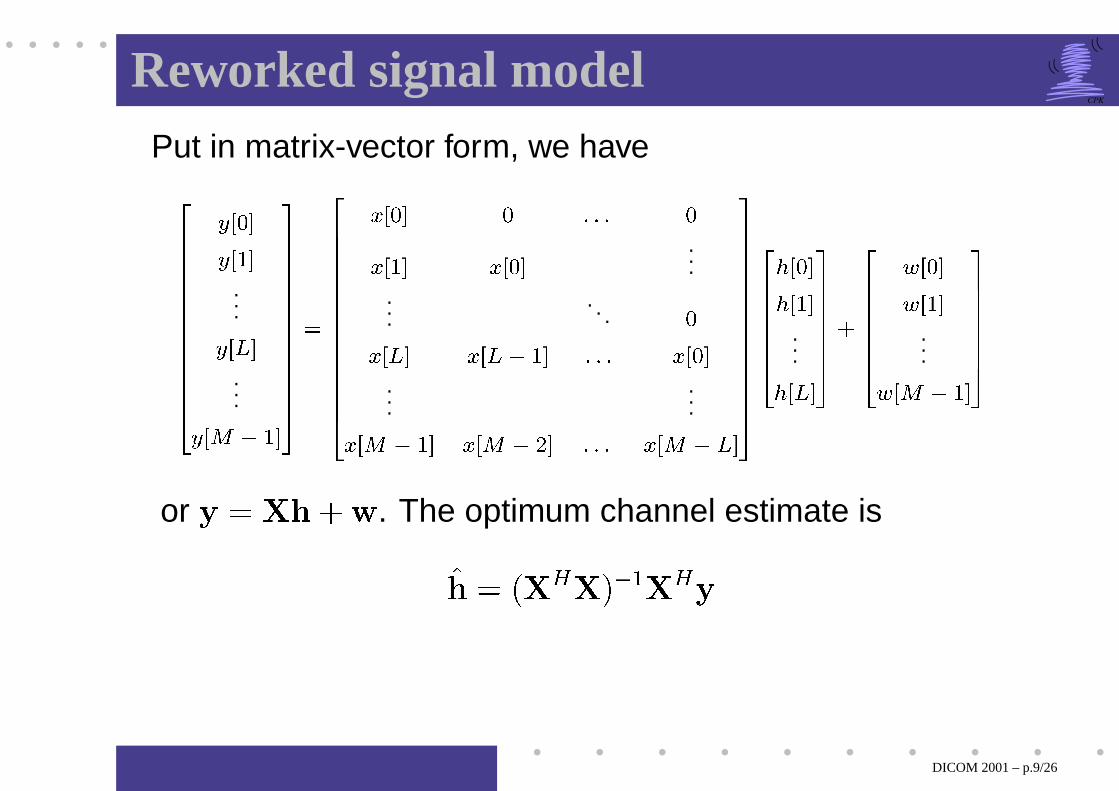
Reworked signal modelPut in matrix-vector form, we have
[\�\]\�\]\�\�\]\�\^\^\^\�\`_M Ia K
M I � K
...M Ib K
...M Ic d � Kef�f]f�f]f�f�f]f�f^f^f^f�f`g
h[\^\^\^\^\�\]\�\^\^\^\�\]\�\`_HIa K a i i i a
HI� K HIa K ......
. . . a
HIb K HI b d � K i i i HIa K...
...HIc d � K HIc d j K i i i HIc d b Kef^f^f^f^f�f]f�f^f^f^f�f]f�f`g
[\�\]\�\^\^\`_L Ia KL I� K
...L Ib Kef�f]f�f^f^f`g
k[\�\]\�\^\^\`_N Ia K
N I� K
...N I c d � Kef�f]f�f^f^f`g
or � � l m � �. The optimum channel estimate is
� m � + l & l , d � l & �
DICOM 2001– p.9/26

Example: Measured UMTS channelWe have a measured impulse response:
1 2 3 4 5 6 7−1
−0.5
0
0.5
1real part of channel
1 2 3 4 5 6 7−1
−0.5
0
0.5
1imaginary part of channel
We have
npo q
and we choose
rpo s t
. The SNR is 20dB.
DICOM 2001– p.10/26
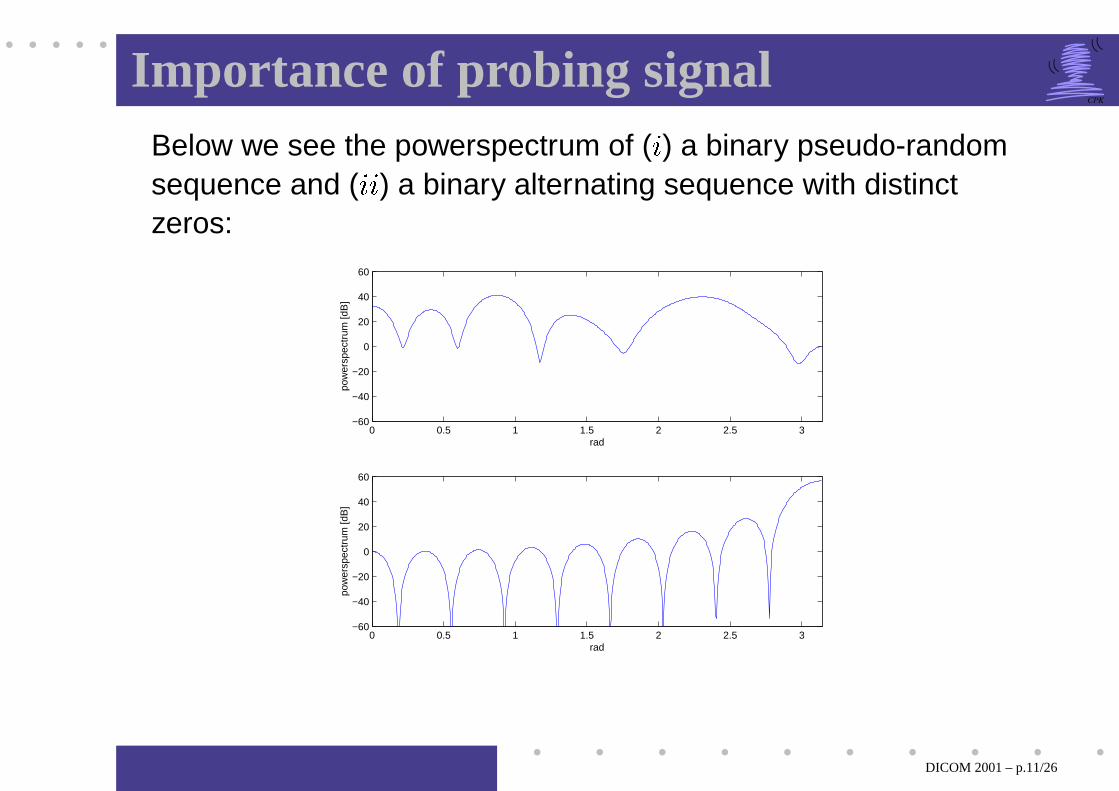
Importance of probing signalBelow we see the powerspectrum of (
u
) a binary pseudo-randomsequence and (
u u
) a binary alternating sequence with distinctzeros:
0 0.5 1 1.5 2 2.5 3−60
−40
−20
0
20
40
60
rad
pow
ersp
ectr
um [d
B]
0 0.5 1 1.5 2 2.5 3−60
−40
−20
0
20
40
60
rad
pow
ersp
ectr
um [d
B]
DICOM 2001– p.11/26

The estimated impulse response
1 2 3 4 5 6 7−1
−0.5
0
0.5
1real part of channel
1 2 3 4 5 6 7−1
−0.5
0
0.5
1imaginary part of channel
(a) Pseudo-random probing signal
1 2 3 4 5 6 7−1
−0.5
0
0.5
1real part of channel
1 2 3 4 5 6 7−1
−0.5
0
0.5
1imaginary part of channel
(b) Alternating probing signal
We see a clear advantage of using a pseudo-random prob-
ing signal.
DICOM 2001– p.12/26

Applications to deconvolution
DICOM 2001– p.13/26
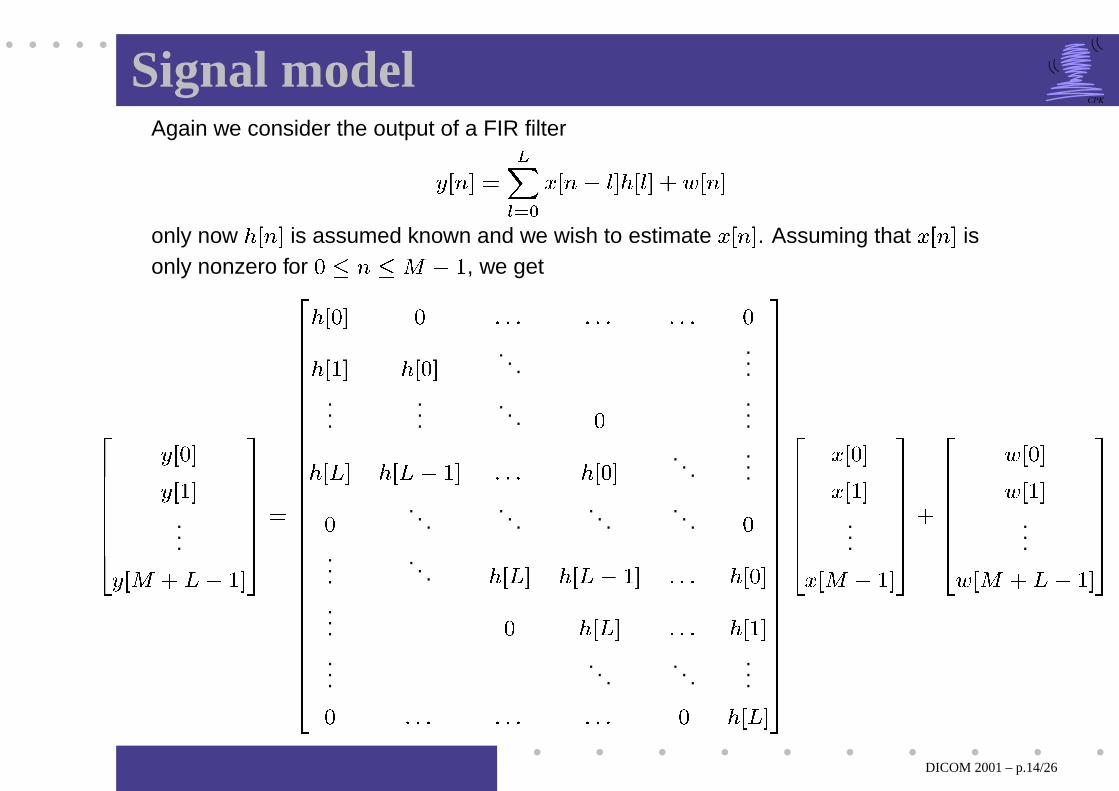
Signal modelAgain we consider the output of a FIR filter
M IJ" K h vwyx z HIJ" d { K L I { K k N IJ" K
only now
L IJ" K
is assumed known and we wish to estimate HI " K
. Assuming that HI " Kis
only nonzero for
a| " | c d � , we get
[\^\^\^\�\]\`_M Ia K
M I� K
...M I c k b d � Kef^f^f^f�f]f`g
h[\�\^\^\^\�\]\�\�\]\�\]\�\^\^\^\�\]\�\^\^\^\�\]\�\�\]\`_L Ia K a i i i i i i i i i a
L I � K L Ia K . . ....
......
. . . a ...L Ib K L Ib d � K i i i L Ia K . . ....a . . .
. . .. . .
. . . a
.... . .
L Ib K L Ib d � K i i i L Ia K
...a L Ib K i i i L I� K
.... . .
. . ....a i i i i i i i i i a L Ib K
ef�f^f^f^f�f]f�f�f]f�f]f�f^f^f^f�f]f�f^f^f^f�f]f�f�f]f`g[\^\^\^\�\]\`_HIa K
HI� K
...HI c d � Kef^f^f^f�f]f`g
k[\^\^\^\�\]\`_N Ia K
N I� K
...N Ic k b d � Kef^f^f^f�f]f`g
DICOM 2001– p.14/26

Zero-forcing equalizerAs before the estimate of } is~ }o �� & � � d � � &����
This is the optimal solution to~ }o �� � � ����� � � � � � � } � ji.e. without restrictions on }.However, if } � � � s�� � s � c
the problem is much harder to solve.
A suboptimal solution to this problem is
� o � � & � � d � � &��
~��� o � � �� �� �¢¡ � � �� u o £�� � � � r � s
This solutions is called the Zero-forcing equalizer, as it forces the
ISI to zero. The draw-back is a degradation of the SNR.
DICOM 2001– p.15/26

Ex: equalization of UMTS channelWe use the measured UMTS channel for a burst of
ro s £ £bits. We assume that the channel is perfectly known.
−2 −1 0 1 2−2
−1
0
1
2
real part
imag
inar
y pa
rt
SNR=10dB
−2 −1 0 1 2−2
−1
0
1
2
real part
imag
inar
y pa
rt
SNR=20dB
−2 −1 0 1 2−2
−1
0
1
2
real part
imag
inar
y pa
rt
SNR=30dB
−2 −1 0 1 2−2
−1
0
1
2
real part
imag
inar
y pa
rt
SNR=40dB
DICOM 2001– p.16/26

Array application
DICOM 2001– p.17/26

Array applicationRecall the array model from lecture 1
+ ++...
¤¥ ¦ §A¨ ¥ ©ª« ¬J® ¯±° ¤¥ ²³µ´²³ ´·¶ ¸ ° ¤¥ ¦ ¹® §A¨ °
J®
º»½¼ ¾ ¿AÀ Á
 ¾ ¿AÀ Á Âà ¿AÀ Á
¦ ¹®º ¾ ¿AÀ Á
¦Â»½¼ ¾ ¿AÀ Á
º Ã ¿ À Á
Lineararray
Planewaveswih incidentangle:
Ä®
Omnidirectionalantenna
Equidistance:
¦Å Æ�Ç ´ÈÉ
¦ ¹® ° ¦ ©ª« ¬® ¯Ê® ¿AÀ ÁAË ® ¿ À Á
DICOM 2001– p.18/26

Array applicationWe have 4 equal powered users with 4 distinct electrical angles
0.2
0.4
0.6
0.8
1
30
210
60
240
90
270
120
300
150
330
180 0
We now want to use the ZF spatial equalizer to estimate the sig-
nals from the 4 users.
DICOM 2001– p.19/26

Array applicationThe array manifold of the ZF exhibits nulls at “interferers”
irrespective of the noise level -> Nulling beamformer.
−2 0 2−40
−30
−20
−10
0
10
20Array manifold for user 1
Pow
er [d
B]
−2 0 2−40
−30
−20
−10
0
10
20Array manifold for user 2
Pow
er [d
B]
−2 0 2−40
−30
−20
−10
0
10
20Array manifold for user 3
Pow
er [d
B]
−2 0 2−40
−30
−20
−10
0
10
20Array manifold for user 4
Pow
er [d
B]
DICOM 2001– p.20/26

Array applicationScatterplots at SNR=15db (blue) and SNR=25dB (red).
−2 −1 0 1 2−2
−1
0
1
2
Inphase
Qua
drat
ure
−2 −1 0 1 2−2
−1
0
1
2
Inphase
Qua
drat
ure
−2 −1 0 1 2−2
−1
0
1
2
Inphase
Qua
drat
ure
−2 −1 0 1 2−2
−1
0
1
2
Inphase
Qua
drat
ure
DICOM 2001– p.21/26

Extensions of model to coloured noise
DICOM 2001– p.22/26

Coloured noiseIn the linear model
� � ��� �ÍÌ
we made the important assumption that Ì is whiteGaussian noise, i.e. that
Î PÌ Ì - Q � = � � +ÐÏ �3 ! ! ! Ï � D ,
If instead Ì is coloured Gaussian with covarianceÎ P � � - Q � Ñ
for an arbitrary Hermitian
Ñ
, we factor it as
Ñ � Ò Ò -
e.g. with a Cholesky factorization.
DICOM 2001– p.23/26

Coloured noiseWe next transform the signal model as
Ó � Ò1 3 � � Ô � � � �The covariance of the filtered noise is
Î P � � - Q � Ò1 3 Î PÌ Ì - Q Ò1 - � Õ
Thus the noise in the modified signal model is white, andthe results from before now apply.
It can be shown, that the LS solution for the modifiedmodel using a whitening transformation is still optimal.
DICOM 2001– p.24/26

Summary of lecture
DICOM 2001– p.25/26

SummaryIn this lecture we have seen:
How to obtain the LS solution to � � � � � � incomplex form.
That this solution is optimal when � is “analogous”.
How it is related to the pseudo-inverse solution.
How to apply this solution tochannel estimation.zero-forcing equalization.nulling beamforming.
DICOM 2001– p.26/26




![ECE-V-DIGITAL SIGNAL PROCESSING [10EC52] …vtusolution.in/.../digital-signal-processing-10ec52.pdfDigital vtusolution.in Signal Processing 10EC52 TEXT BOOK: 1. DIGITAL SIGNAL PROCESSING](https://img.dokumen.tips/doc/110x75/5afe42bb7f8b9a256b8ccd2e/ece-v-digital-signal-processing-10ec52-signal-processing-10ec52-text-book.jpg)
























