-
7/29/2019 AC Vector Drives 4 Implementation
1/41
School of Electrical and Electronic Engineering
AC Vector Controlled Drives
I nduction Motor Drives
Greg AsherProfessor of Electrical Drives and Control
[email protected]
-
7/29/2019 AC Vector Drives 4 Implementation
2/41
Part IV
Implementation of Vector Control
Direct rotor flux control
Indirect Rotor Flux control
Controller design
Discussion
-
7/29/2019 AC Vector Drives 4 Implementation
3/41
Fundamental structure of vector control
All vector controllers first transform measured currents to dq
domain
- Measured voltages can be transformed to dq if necessary (not
shown below)
Vector controller controls the currents in the dq domain and
outputs dq voltage demands
Voltage demands are inversed transformed into 3-phase demand
voltages for PWM
The transformations need the angle at every point in time
vs*
vs*
isd
isq3/2
is
is
isa
isb
isc
je
vsd*
vsq*
je 2/3
v*sabc
PWM IM
Vector
Controller
MicroprocessorVector controller needs to calculate
-
7/29/2019 AC Vector Drives 4 Implementation
4/41
Finding the Rotor Flux angle
r
d
q
)()( tdt
dt
e
=
= dttt e )()(
dq axis frame rotates at instantaneousspeed e:
DIRECT VECTOR CONTROL
- in which the rotor flux angle is derived from measured
stator
voltages and currents
INDIRECT VECTOR CONTROL
- in which is derived from the vector controlled constraint
equation
-
7/29/2019 AC Vector Drives 4 Implementation
5/41
Vector Control using
Direct Rotor Flux Orientation (DRFO)
-
7/29/2019 AC Vector Drives 4 Implementation
6/41
Vector Control using DRFO
Finding the rotor flux angle
Consider the dynamic equations of the two stator coils in the
frame:
d
dRiv ssss
+dt
dRiv
ssss
+( ) dtiRv ssss ( ) dtiRv ssss
We want rotor fluxes
Remember the relation between rotor and stator fluxes:
rosss iLiL + rror iLiL + rrsor iLiL + rosss iLiL +
( ){ } ssssso
rr iLdtiRv
L
L=
( ){ } ssssso
rr iLdtiRv
LL =
-
7/29/2019 AC Vector Drives 4 Implementation
7/41
Vector Control using DRFO
Finding the rotor flux angle
( ){ } ssssso
rr iLdtiRv
LL =
( ){ } ssssso
rr iLdtiRv
L
L= q
r
is
r
r
d
Note: the above can be drawn as two
separate diagrams one for
and one for
r- -
++
is
vs
o
r
L
L
sL
s
R
1
r
rtan
R
is Flux &flux angle
calculatoroL
1Rvs imrd
-
7/29/2019 AC Vector Drives 4 Implementation
8/41
Vector Control using DRFO
The current controllers
isq
isd
vs*
3/2
is isabcje
vsq*
vsd*
2/3
v*sabc
PWM IM
vsabc3/2
vs
Flux &
flux angle
calculator
je
isq*
isd*PI
PI
isq and isd are compared with demand values
Ifisq* > real isq,then want more q-axis voltage to increase
isq
isq*means a torque demand,
isd*means a flux current demand
The PI controllers acting on the current errors are called the
current controllers
Real voltages are difficult to measure obtain from DC-link
voltage & switching states
-
7/29/2019 AC Vector Drives 4 Implementation
9/41
Vector Control using DRFO
The speed controller
isq
isd
vs*
3/2
is isabcje
vsq*
vsd*
2/3
v*sabc
PWM IM
vsabc3/2
vs
Flux &
flux angle
calculator
je
isq*
isd*
PI
PI
PIr*
r
+
-
r is measured and compared with demand value
Ifr * > real r ,then want more isq. But must limit isq* to
e.g. 2x rated The PI controller acting on the speed error is called
the speed controller
-
7/29/2019 AC Vector Drives 4 Implementation
10/41
Vector Control using DRFO
The flux controller
isq
isd
vs*
3/2
is isabcj
e
vsq*
vsd*
2/3
v*sabc
PWM IM
vsabc3/2
vs
Flux &
flux angle
calculator
je
isq*
isd*
PI
PI
PIr*
r
+
-PI
oL
1r
-+
imd* imd
r
imrd is derived and compared with demand value
Ifimrd
* > real imrd,
then want more isd
to increase the flux
imrd* is derived from a field weakening block The PI controller
acting on the imrd error is called the field or flux controller
-
7/29/2019 AC Vector Drives 4 Implementation
11/41
Direct Rotor Flux Orientation (DRFO)
Problem integrator drift
DRFO is NOT used for high performance vector control
r- -
++
is
vs
o
r
L
L
sL
sR
1
r
rtan
R
Ideal vs (similar waveform forvs)
Let e.g. vscontain (small) dc offset. This will be integrated to
give increasing output Called integrator drift - situation is shown
in diagrams below
Int i/p Int o/p Int i/pInt o/p
With sin input
-
7/29/2019 AC Vector Drives 4 Implementation
12/41
Direct Rotor Flux Orientation (DRFO)
Problem integrator drift
Blue line is frequency response of ideal integrator see that it
has infinite dc
gain this is what causes integrator drift
1Hz 10Hz 100Hz
0
-90
-45
Must limit output. Do this by
replacing 1/s by 1/(sc+1)
Cut-off frequency fc (=1/2c) isabout 1Hz
Phase errors introduced below 1Hz
This means that will be wrong
But OK if e above 2Hz
-
7/29/2019 AC Vector Drives 4 Implementation
13/41
Direct Rotor Flux Orientation (DRFO)
Problem Stator resistance
r- -
++
is
vs
o
r
L
L
sL
sR
1
r
rtan
R
Remember: Vs proportional to frequency
At high frequencies vs >> isRs
Below 2Hz, vs or even < than isRs Since Rs varies thermally,
it is not an accurate parameter
Therefore signals and can be inaccurate below 2Hz
Integrator drift and poor knowledge ofRs means that low
speedperformance is poor. In fact, a DRFO drive often doesnt even
start!
-
7/29/2019 AC Vector Drives 4 Implementation
14/41
Vector Control using
Direct Rotor Flux Orientation (DRFO)
Finds the flux angle from a Flux estimator with measured
voltages and
currents gives rotor flux estimation in coordinates
Angle obtained using inverse tan function
Flux and angle estimator doesnt use speed measurement
Flux and angle estimator uses integrator and is dependent on
RS
Poor performance below 2Hz due to integrator drift and RS
errors
becoming important at low speed
Main use is in speed sensorless vector drives due to lack of
speed
sensor for flux estimator; other methods used to overcome
integrator
drift and RS problem
-
7/29/2019 AC Vector Drives 4 Implementation
15/41
Vector Control using
Indirect Rotor Flux Orientation(IRFO)
V t C t l i I di t R t Fl O i t ti
-
7/29/2019 AC Vector Drives 4 Implementation
16/41
Vector Control using Indirect Rotor Flux Orientation
Getting the rotor flux angle
Consider the vector control equations
sdmrdmrdr
r iiidt
d
R
L = D-axis vector control equation :
sdmrdmrdr iisi = ( ) sdmrdr iis =1 ( ) sdrmrd isi 11
+ imrd can be obtained from isdas follows:
sqmrdr
sqmrdr
rsl ii
iiL
R
1 = q-axis vector control (constraint) equation :
dti
idtdt
mrdr
sqrslre )()(
+=+==
We will therefore derive as :
with imrd obtained above
Vector Control using IRFO
-
7/29/2019 AC Vector Drives 4 Implementation
17/41
Vector Control using IRFO
Implementing the rotor flux angle calculator
( ) sdrmrd isi 11
+dtii
dtdtmrdr
sqrslre )()(
+=+==
isq
isdisabcje
vsq*
vsd*2/3 PWM IM
je
isq*
isd*
PI
PI
PIr*
+
r
-
3/2
sl
imrd
1
1
+r
s
P/2
re
+
+mrdr
sq
i
i
Vector Control using IRFO
-
7/29/2019 AC Vector Drives 4 Implementation
18/41
Vector Control using IRFO
Adding field weakening
isq
isdisabcje
vsq*
vsd*2/3 PWM IM
je
isq*
isd*
PI
PI
PIr*
r
+-
mrdr
sq
i*i
3/2
sl
P/2
re
+
+
irmd
1
1
+rs
imd*
PI
r-+
Demand isq* can be used for slip gain calculator (cleaner than
isq) Field weakening added as shown
If no field weakening action, isd* can be used in slip gain
calculator
Vector Control using IRFO
-
7/29/2019 AC Vector Drives 4 Implementation
19/41
Vector Control using IRFO
Why IRFO works
Proof for base speed when imrd= isd Let the real flux angle in
the machine be
Let the real flux angle in the controllerbe
The current vector is the same since currents are measured
The rotation speed e is the same But the angle error in the
d-axis will produce different dq current components
e
q
is
r
d
sqi
sdi
eis
dq
r
sdisqi
d
er
What the controller thinksSituation in the real machine
-
7/29/2019 AC Vector Drives 4 Implementation
20/41
Vector Control using IRFO
-
7/29/2019 AC Vector Drives 4 Implementation
21/41
Vector Control using IRFO
Why IRFO works
sd
sq
rsq
mrdr
rsl i
iiiLR
1 = q-axis vector control (constraint) equation :
But in the controller we also have:
sd
sq
r
sq
mrdr
rsl
i
i
i
iL
R
1 =
slsl = We know that So the following is true:
sd
sq
rsd
sq
r i
i
i
i
1
1 =
But:2222
sqsdsqsds iiiii +
If rr = then =is
d
q
sdi
sqi
d
sqi
sdi
qHence = But if rr then and
r Errors in cause orientation lossrR Unfortunately, can change
by 50% to 100% due to heating
-
7/29/2019 AC Vector Drives 4 Implementation
22/41
Vector Control using
Indirect Rotor Flux Orientation (IRFO)
Finds the flux angle by forcing the vector control constraint
equation on the
system. This is only true if q-axis flux is zero (ie.
orientation)
Needs to have speed measurement
Performance is excellent and is an industry standard
Only problem is variation of rotor time constant due to changes
of Rr
Rotor time constant also changes due to LR in field
weakening
For best performance, requires a r tuning mechanism
Under field weakening common to have ra function ofimrd (look up
table)
-
7/29/2019 AC Vector Drives 4 Implementation
23/41
Controller Design
(Either DRFO or IRFO)
C t ll d i i i
-
7/29/2019 AC Vector Drives 4 Implementation
24/41
Controller design - revision
)(
)(
pssaskk)s(G ii ++=
)(aswrittenbecan
ps
k
+
222 2
)(
)(
)(
1 nn
ii
iii
iicl
ss
askk
akkskkps
askk
G(s)
)s(G
)s(*x
)s(x)s(G +
+=++=+
sask ii )( +
1 +pps kx*(s) x(s)
skk intprop +
222 nnss +
System is digital with a samp. Normally samp is about 10-20 x n
[for s-plane design]
n can be related to step response rise time 3/n ; orsettling
time 4/n Given n and , know ; therefore can find ki and ai
samp=2fsampP
n is natural frequency in rad/s often called bandwidth chosen by
designer is the damping - chosen by designer
controller plant
-
7/29/2019 AC Vector Drives 4 Implementation
25/41
Controller speeds and sampling processes
-
7/29/2019 AC Vector Drives 4 Implementation
26/41
Controller speeds and sampling processes
Note update is fast motor position can be sampled at 200 s Motor
speed doesnt change very fast - cannot be sampled at 200 s
Seen by considering [r(k)- r(k-1)]/Tsamp - position will not
have changed in 200s!
r derived e.g 2ms (every 10th sample). Hence processing isq*
imd* sl also at 2ms
Slow sampling shown in black
isq
isdisabcje
vsq*
vsd* 2/3PWM IM
je
isq*
isd*
PI
PI
PI
r*
r
+-
mrdr
sq
i
*i
3/2
sl
P/2
re
+
+
irmd
1
1
+r
s
imd*
PI
r-+
d/dtr
Control block diagram for the Current Controllers
-
7/29/2019 AC Vector Drives 4 Implementation
27/41
Control block diagram for the Current Controllers
The isd and isq P+I controllers will be identical one design for
both Current loops are fast. Choose n as 2 x 100-200Hz e.g.
1000rad/s
Need to find plant transfer function. Look at all delays in
system (modelled by 1st
order time constant)
s
ask ii )( +1
1
+Is
1
1
+fs
)s(Gp
plantinvertercontroller
Anti-aliasing filter
isq* isqvsq* usq*
I= 200s
f= 200s
Inverter delay: delay before demand voltage actually gets on to
lines. Normally
assume 1/fsamp. In our example, this is 200s
Filter filters away PWM current ripple, cut-off < fsamp/2
e.g. 1kHz f 200 s What is Gp(s)?
Finding the plant for the current controller design
-
7/29/2019 AC Vector Drives 4 Implementation
28/41
Finding the plant for the current controller design
Consider the dynamic equations for the stator coils in dq
frame
rdr
osqsesdssdssd dt
d
L
LiLi
dt
dLiRu +
rdr
oesdsesqssqssq LLiLi
dtdLiRu +
It would be good if we had only the first two terms e.g. for the
d-axis equation:
sdssdssd iddLiRu sdssdssd siLiRu sdsssd iRLsu )( +
sd
ss
sd uRLs
i)(
1
+ 11 +s
s
s
R/usd isd
sqssqssq id
dLiRu
11 +s ss R/
isqusqsq
sssq uRLsi
)(1+
And the 1st two terms of the q-axis equation:
Giving:
Idea of voltage compensation terms
-
7/29/2019 AC Vector Drives 4 Implementation
29/41
(also called feedforward or decoupling terms)
rdr
osqsesdssdssd dt
d
L
LiLi
dt
dLiRu +
rdr
o
esdsesqssqssq L
L
iLidt
d
LiRu +
Of course we had:
isabc
2/3 PWM IM
3/2je
je
isqisd
vsq*
vsd*isd*
PI
PI
isq*
+
The terms in the red box are the demand
voltages to overcome changing flux andthe back-emf in the
machine.
We can add these as feed-forward terms
into the controller
imdro L/sL 2
se L-
+
se L
roe L/L2
++
+
Current Controllers
-
7/29/2019 AC Vector Drives 4 Implementation
30/41
Current Controllers
The feedforward terms means that the PI control only supplies
the voltages toincrease or decrease the current
The plant transfer function Gp(s) is now 1st order and given
below
The value of s is about 10-25ms and is much slower than the
delays of filter and
inverter
s
ask ii )( +
1
1
+Is
1
1
+fs
plantinverter
Anti-aliasing filter
isq
1
1
+ss
s
R/
f= 200s
f= 200s f= 20ms
isq*
Current Controllers
-
7/29/2019 AC Vector Drives 4 Implementation
31/41
Current Controllers
The feedforward terms means that the PI control only supplies
the voltages toincrease or decrease the current
The plant transfer function Gp(s) is now 1st order and given
below
The value of s is about 10-25ms and is much slower than the
delays of filter and
inverter
plant
s
ask ii )( +isq* isq
1
1
+ss
s
R/
5050+s Control design is now easy. Let s = 0.02 and Rs = 1.
Hence plant
Assume wish for n = 1000rad/s with =0.75
Then we have:
From which PI parameters are derived
622 10150050)5050( +ssaksks iii
Control block diagram for the Speed Controller
-
7/29/2019 AC Vector Drives 4 Implementation
32/41
g p
The machine will develop torque Te and this will cause a speed
response
The response will be defined by:
2
rarvrLoade BBd
d
JTT+ J = moment of inertia B
v
= viscous friction coefficient
Ba = aerodynamic friction coefficient
Tload is associated with the application it is unknown and is
treated as a disturbance
Bv and Ba may be included as part ofTload if they are not
known
J is that of the motor and load
Ba normally neglected to make design linear (but can be
significant at high speeds)
rvrLoade BJ sTT + )(1 Loadev
r TTJ/Bs J/ + Writing using Laplace operator and ignoring
aerodynamic friction:
J/Bs
J/
v
1Te
TLoad
r Often Bv very small and put to zero
Control block diagram for the Speed Controller
-
7/29/2019 AC Vector Drives 4 Implementation
33/41
g p
ktcalled the torque constant derived from
We can now put a torque demand isq* on to machine. The machine
will develop
torque according to isq this will be within 2-10ms of the torque
demand fast.
sask ii )( +
plant
J/BsJ/v
1
TLoadisq* isqf= 5ms
sqmrdr
o iiL
LPT
= 2
23 (replace 3 by 2/3 for
3/2 x peak convention)
Te rtk
r*
Speed Controller Design
-
7/29/2019 AC Vector Drives 4 Implementation
34/41
p g
ktcalled the torque constant derived from
We can now put a torque demand isq* on to machine. The machine
will develop
torque according to isq this will be within 2-10ms of the torque
demand fast.
sqmrdr
o iiL
LPT
= 2
23 (replace 3 by 2/3 for
3/2 x peak convention)
plant
sask ii )( + isq*= isq
J/BsJ/kv
t+ rr*
Current loop effectively neglected since it speed will not
change much in a few ms!
Combine kt with plant, and control design follows in same way as
before
n difficult to chose generally a few Hz for machines 5-50kW In
practice, J and mechanics of plant not known, PI is normally a PID
and is set bytrial and error by the commissioning engineer
The field or flux controller
-
7/29/2019 AC Vector Drives 4 Implementation
35/41
Field controller takes error ofimrd (or flux) and outputs signal
isd* Plant will take isd* and outputs imrd. Must identify all
delays between isd* and imrd
Know that isd* follows isd with delay 2-10ms (like
q-component)
isq
isdisabcje
vsq*
vsd*2/3 PWM IM
je
isq*
isd*
PI
PI
PI
r*
r
+-
mrdr
sq
i*i
3/2
sl
P/2
re
+
+
irmd
1
1
+rs
imd*
PI
r-+
d/dtr
The field or flux controller
-
7/29/2019 AC Vector Drives 4 Implementation
36/41
Field controller takes error ofimrd (or flux) and outputs signal
ids* Plant will take isd* and outputs imrd. Must identify all
delays between ids* and imrd
Know that isd* follows isd with delay 2-10ms (like
q-component)
plant
s
ask ii )( +1
1
+r
s
isd* isdf= 5ms
imrdimrd*
To choose n: note imrd* comes from the field weakening function
driven by speed.Thus imrd* cannot change by more than the CL speed
bandwidth (a few Hz). ChooseCL flux n as e.g. 8-10 times that of
the speed.
Eg let r = 100ms, n = 20Hz, damping factor = 0.8
Require: s2+200s+15800; have s2+10(1+k)s+10ka
k=19, a =83
BUT in field weakening r increases slower plant. Do not try for
too much n
Understanding Closed Loop responses
1 Current Loop
-
7/29/2019 AC Vector Drives 4 Implementation
37/41
1. Current Loop
If a step isq
* is applied to a machine in
Bv is zero or very low, then machine
will accelerate in an uncontrolled
manner (see right)
The acceleration depends on the
difference between ktisq* andTLoad
isabc
2/3 PWM IM
3/2je
je
isqisd
vsq*
vsd*isd*
PI
PI
isq*
+
Assume no speed or flux loop see below
isqisq*
2-10ms
A torque demand or flux producing current demand may
be applied. The actual isd and isq will track the demandswithin
milliseconds.
isq
isq*
J
ik
d
d sqtr =
J
Tik
d
d Loadsqtr =
(i) idq applied with no load torque
(ii) idq applied with constant Tload but < Te
(i)
(ii)
Understanding Closed Loop responses
1 Action of Speed loop
-
7/29/2019 AC Vector Drives 4 Implementation
38/41
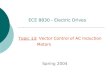
1. Action of Speed loop
Speed settling - n_speed
Current settling - n_cur
isq
r*
r
t10 t2 t3 t4 t5
t=0: step speed demand (e.g. 1000rpm); isq* hits limit at 2 x
rated value (2x rated Te) t1: isq reaches demand current (after a
few milliseconds); motor accelerates constant rate
t2: speed approaches final value; isq* leaves limit
t3: speed settles at demand value; isq drops to low value (e.g.
because low Bv)
t4: rated Tload applied; speed drops; isq* responds to error
t5: r reaches r*, output of speed PI is constant
imrd*
isq*
IRFOcurrentcontrol
IMPI+ -
r
r*
Tload= 0, then rated at t4
-
7/29/2019 AC Vector Drives 4 Implementation
39/41
IRFO Vector Control
Nearly all vector controlled commercial drives are IRFO
All will have field weakening and voltage compensation terms
All will have rotor time constant tracking similar to the scheme
used
in the reference section of Worked Example 3
No products use DRFO for sensored drives
Sensorless drives (no speed sensor on shaft) may use DRFO or
IRFO
structures but speed/torque/flux control performance is poor for
f
-
7/29/2019 AC Vector Drives 4 Implementation
40/41
As Masters students should know the physics of IM operation
Understand V-f drive and why their dynamic performance is not
good
Be able to derive machine parameters from manufacturers data
Understand the concept of high-performance drive and servo
performance
for speed, torque and flux
Understand the concept of space vector applied to AC
machines
Understand how a 3-phase machine can be transformed into a
2-phase
one, and the transformations used to do this
Understand how a rotating measurement frame can measure the
rotating
vector as DC quantities and the concept of field orientation and
torque andfield current components
Be familiar with two scaling conventions (3/2 time peak and rms)
and be
able to derive rated values of isd and isq from machine data
What you need to know
-
7/29/2019 AC Vector Drives 4 Implementation
41/41
y
Understand in principle how the dq-axis field orientated
equations are
obtained (but you will not be asked to derive these)
Understand DRFO and IRFO as the two ways of tracking the angle
of rotor
flux in real time
Know the structure of DRFO and IRFO controllers and be able to
reproduce
them; understand their advantages and disadvantages
Understand the IRFO slip and torque equations and be able
manipulate themto find speeds, torques, currents etc when machine
is driving known loads
Understand orientation errors in IRFO and why the dq current
components in
the machine and controller may be different. For the 20-credit
course, you
should also understand how the rotor time constant is tracked in
real time Understand how to design current, field and speed
controllers given the
machine and load parameters
Understand how the machine speed and currents behave when step
changes
in speed and load torque are applied