Embed Size (px)
Citation preview

AAS 12-159
SPACE OBJECT MANEUVER DETECTION VIA A JOINT OPTIMALCONTROL AND MULTIPLE HYPOTHESIS TRACKING APPROACH
Navraj Singh, Joshua T. Horwood, and Aubrey B. Poore∗
An optimal control framework is presented as a post-processor to a multiple hy-pothesis tracker for resolving uncorrelated tracks (UCTs) generated by space ob-ject maneuvers. The optimal control framework uses the total velocity increment∆V as the cost functional to determine feasibility of maneuvers. The methodobtains accurate ∆V estimates for connecting two UCTs via fuel-optimal maneu-vers. In addition, a method is proposed for treating uncertainty in the UCT states,via the unscented transform, to determine the probability that a maneuver is fea-sible. The approach is most applicable to routine but unannounced fuel-optimalmaneuvers conducted by space objects.
INTRODUCTION
A critical requirement in achieving robust space situational awareness (SSA) is the ability toprocess and reduce the number of uncorrelated tracks (UCTs), which are newly acquired tracks onobjects that do not associate (correlate) with any known objects in the space catalog.1 While thereare many reasons for UCTs, a common source is that of a maneuvering space object. The ability toassess the possibility of maneuvers from UCT observations is therefore an important goal in SSA.Our approach to this problem, presented in this paper, is to first use a modern tracking system suchas a multiple hypothesis tracker (MHT)2 to detect broken tracks and UCTs. If an object is not seenwithin a predicted gate and subsequently a UCT is generated by it, then we propose an optimalcontrol framework, as a post-processor, for maneuver detection and track stitching. This work hasits origin in the recent work of Holzinger and Scheeres.3 In this paper, we extend this work by firstusing a MHT to detect the possibility of a maneuver and then using an optimal control frameworkbased on the ∆V cost functional (which is directly proportional to fuel-cost) as a post-processorto determine the feasibility of possible maneuvers. The method is most applicable to unannouncedfuel-optimal maneuvers routinely conducted by space objects for tasks such as orbit maintenanceand station-keeping.
A common approach for maneuver detection in data-rich tracking environments (such as air andmissile defense) is the dynamic multiple model framework, and in particular, the interacting mul-tiple model (IMM) filter or the related generalized pseudo-Bayesian (GPB) filter.4 Typically, themotion models differ in terms of their process noise parameter. The changes in the modal proba-bilities in an IMM (or GPB) filter can imply the possibility of a maneuver, as suggested in an AGIwhite paper.5 However, in the data-starved space surveillance environment, maneuvers are rarelyobserved while they are being conducted, or they are so slow (as in a slow-burn case) that one mightmiss them. While a multiple model filter can still crudely detect possible maneuvers, covariance
∗Numerica Corporation, 4850 Hahns Peak Drive, Suite 200, Loveland, CO 80538
1
Please cite this paper as: N. Singh, J. T. Horwood, and A. B. Poore, “Space object maneuver detection via a joint optimal control and multiple hypothesis tracking approach,” in Proceedings of the 22nd AAS/AIAA Space Flight Mechanics Meeting, Charleston, SC, January 2012 (Paper AAS-12-159)

consistency, which is critical for robust tracking, need not be maintained, especially if the maneu-ver filter model does not match the true dynamics of the maneuver. In addition, little informationis obtained regarding the maneuver cost or the maneuver profile. We recommend instead an opti-mal control based approach for improved accuracy and for “stitching” disparate tracks linked by amaneuver.
The proposed optimal control approach is part of a broader proposal consisting of three steps: (i)detect candidate anomalies (broken tracks and UCTs) by running a MHT that does not contain anymaneuvering model hypotheses; (ii) as a post-processor, use a cheap maneuver detection algorithm,such as a high process noise filter model to rule out any obvious infeasible/unlikely maneuvers;and (iii) use the optimal control framework presented in this paper for fine maneuver detection,maneuver reconstruction, and track stitching/fusion.
This paper focuses on Step (iii). The main goal of the optimal control computation step is toaccurately reconstruct possible maneuvers from given track states or measurements. To achievethis, we use a framework that employs the total velocity increment ∆V as the cost functional todetermine feasible maneuvers. We choose ∆V as the cost because it is directly proportional to fuelcost and, as such, it is the most important cost metric used in space object mechanics.6 In addition,∆V values are often catalogued in the form of ∆V budgets for many space object missions andmaneuver types. Obtaining accurate ∆V estimates and associated control profiles that connectbroken tracks facilitates the use of known ∆V budgets in determining feasibility of maneuvers.Although the use of ∆V in the optimal control problem leads to numerical singularities and hasled others to consider alternative cost functionals, we have overcome these numerical difficulties.Specifically, we apply the Huber approximation7 to make the control problem tractable. A keyfinding from our numerical simulations is that by using ∆V as the cost to be minimized, optimalcontrols are found to be impulsive in nature (disregarding spacecraft specific thrust models), whichconfirms known theoretical results in special cases.8 Our results also suggest that the obtainedoptimal control profiles can aid in reconstructing the type of maneuver.
Finally, the end goal we seek is to obtain a reasonable estimate for the “probability of a maneuver”for a given UCT pair, and accurate ∆V estimates will be an important component of a model forthis maneuver probability. In the absence of any data other than UCT track states, and under theassumption that space objects will most often conduct any maneuvers in a fuel-optimal manner,we propose to resolve possible UCT pairings according to their feasibility in terms of fuel cost ofa possible maneuver linking the pair. To robustly use the obtained ∆V estimates for connectingmean UCT states, we show how to address the uncertainty in the track states that form the boundaryconditions of the control problem. In particular, we describe an efficient method based on theunscented transform9 to approximate the probability distribution of the ∆V cost. We then define ahypothesis test that determines the probability that the ∆V cost is feasible. This probability maysubjectively be understood as the “probability of a maneuver.” We show that a correct computationof the ∆V distribution is critical for achieving the correct UCT association. We demonstrate thegeneral theory with several examples and show that the entire framework is robust, reconstructsaccurate ∆V estimates and associated ∆V -optimal control profiles, and is an efficient method formaneuver validation and UCT resolution.
The paper is organized as follows. First, we briefly present the problem statement. Then, theoptimal control problem and the method to solve it are discussed. Next, a method to treat the uncer-tainty in the boundary conditions of the optimal control problem is presented. Finally, simulationstudies are conducted, the results are analyzed, and conclusions are made.
2

8642
1
3
5
7 9
10
11
12
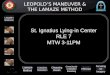
Frame 1 Frame 2 Frame 3 Frame 4 Frame 5
Figure 1. The data available to the MHT through the first five frames.
8642
1
3
5
7 9
10
11
12
Frame 1 Frame 2 Frame 3 Frame 4 Frame 5
new track
extended track
false alarms / UCTs
Figure 2. Tracks, UCTs, and false alarms generated by running an MHT withoutmaneuver detection.
STATEMENT OF PROBLEM
We first state the main goals addressed in this paper:
1. Given point estimates for an initial and final space object track state, compute the fuel-optimalcontrol cost and control profile, while keeping the framework as general as possible.
2. Given uncertainties in said initial and final states, compute the distribution of the fuel-optimalcontrol cost.
3. Formulate a hypothesis test for maneuver feasibility, and a test for scoring UCT associa-tions/correlations based on the distribution of the fuel-optimal control cost.
Further, the key assumptions we make in the paper are the following:
1. We are given full 6-D track states (e.g. as output of an orbit determination process).
2. Any maneuvers conducted by space objects, in the absence of any other knowledge, are con-ducted in a fuel-optimal manner.
3. In the absence of any data other than the track states, candidate UCT associations/correlationsare scored based on the “control distance” or the “fuel-cost distance.” That is, the associationwith the lowest possible fuel cost is assumed to be the correct one.
We now briefly formalize the notion of determining if a maneuver is physically realistic in termsof fuel cost. The optimal control computation that will be described shortly connects two point
3

8642
1
3
5
7 9
10
11
12
Frame 1 Frame 2 Frame 3 Frame 4 Frame 5
extended trackstitched track
Figure 3. The result of applying a post-processor track stitching algorithm to connectdisparate tracks, UCTs, and false alarms by way of an optimal control.
state estimates x(t0) and x(tf ). In practice, these state estimates would usually be the output ofa batch estimation (orbit determination) process, and thus would have some uncertainty associatedwith them. We assume that the initial state is a Gaussian random variable X0 ∼ N (x0,P0),the final state is Xf ∼ N (xf ,Pf ), and the joint distribution of X0 and Xf or, equivalently, ofX ≡ (X0,Xf ), is X ∼ N (µ,P), where µ = (x0,xf ), P = diag(P0,Pf ). Our goal in thispaper is to compute the distribution of ∆V ≡ ∆V (X), which is a complicated transformation sincethe mapping involves solving an optimal control problem. Once a CDF for the ∆V random variableis obtained, we calculate P (∆V 6 ∆V th) for some ∆V th determined by the user. The largerthis probability, the more feasible the maneuver is understood to be. In addition, this probability isunderstood to be a crude estimate of the “probability of a maneuver.”
The end goal is to incorporate this framework for dealing with maneuvering spacecraft practicallywithin a multiple hypothesis tracking (MHT) framework.2 A full discussion of MHT is outsidethe scope of this paper, but what follows is a brief discussion of a method for joint association andmaneuver detection based on “track stitching” which has the computational advantage that disparatetracks and UCTs can be stitched or pieced together using the optimal control approach as an offlinepost-processor to the MHT. In this approach, we first process the tracks and reports through astandard MHT ignoring the possibility of any maneuvers. If tracking actual maneuvering targets,this first pass will inevitably generate broken tracks and UCTs. For example, if the reports in thescenario of Figure 1 are processed through an MHT in this manner (note that the quiescent modelin this example is motion along a horizontal line), then track ‘1’ would not receive any updates overthe five frames of data, a new track would be initiated in Frame 3 beginning with report ‘7’, andreports ‘3’ and ‘5’ would be declared UCTs (if they are full rank states) or false alarms (if they arelower-dimensional observations). These results are depicted in Figure 2. Next, as a post-processor,all of the broken tracks and false alarms (reports ‘1’, ‘3’, and ‘5’ in this example) are gatheredand we then determine if they could be stitched together or linked amongst themselves or to anyinitiated tracks (track 7 → 9 → 11 in this example) by way of an optimal control. Before evenattempting to solve such a nonlinear control problem, we would use a cheaper maneuver detectionalgorithm, such as an impulsive maneuver filter model with process noise, to rule out any unlikelymaneuver hypotheses. For those hypotheses that remain, the optimal control cost distribution wouldthen be computed to assess if a maneuver is physically realistic. For example, referring once againto Figure 2, a feasible optimal control might exist between reports ‘1’ and ‘3’; the two reports wouldthen be stitched or fused together using a standard filter propagation algorithm (e.g., the UKF) inconjunction with the nominal dynamical model and the computed optimal control. This processwould be repeated on the stitched track 1 → 3 and report ‘5’. What could result by applying the
4

track stitching methodology to this simple example is depicted in Figure 3. Two tracks (withoutbreaks) are obtained and reports ‘3’ and ‘5’, originally declared to be UCTs, are resolved. We nextdicuss the dynamical model and cost functions used in our optimal control framework.
DYNAMICS AND CONTROL COST FUNCTIONS
In our framework, we use a general Newtonian dynamical model with respect to Cartesian Earth-Centered Inertial (ECI) position-velocity coordinates, with propulsive thrust arising linearly in theequations. The general form is given by the ordinary differential equation
x′(t) = f(x(t),u(t), t) ≡ fd(x(t), t) + B(x(t), t)u(t),
where u ∈ R3 is the thrust control input, B ∈ R6 × R3, and fd : R6 × R → R6 are the (ballistic)equations of motion of the system∗. In principle, we could use an object-specific thrust model if theobject type was known.
As mentioned above, a common control effort metric used in spacecraft maneuver applicationsto assess fuel cost is the total velocity increment ∆V . Assuming that u is in units of acceleration(which should be the case if it is modeled as a thrust input as described above), the total ∆V effortover a time interval is simply the integrated thrust magnitude over the interval:
∆V = ‖u(t)‖L1 =
∫ tf
t0
‖u(t)‖2 dt =
∫ tf
t0
√u(t)Tu(t) dt. (1)
While minimum ∆V problems have been studied in the literature for special cases of maneuvers,they have been avoided in general settings, partly because the integrand in the ∆V definition aboveis non-differentiable near the zero-thrust case (which leads to numerical difficulties in optimiza-tion problems when transitioning from zero-thrust to low-thrust solutions). For example, a moremathematically tractable alternative often used is the quadratic cost,
P =1
2‖u(t)‖2L2
=1
2
∫ tf
t0
u(t)Tu(t) dt, (2)
which is often interpreted as a total energy.3 Throughout the paper, the term “L1-cost” is used inter-changeably with “∆V cost”, and “L2-cost” is used interchangeably with “energy cost” or “quadraticcost.” The reader is also referred to Ref. [6] for an overview of the relation between the L1 and L2
optimal control problem. We note that P can be used to construct an upper bound on the ∆V costvia the Cauchy-Schwartz inequality: ∆V 6
√2P (tf − t0). This bound, however, is often quite
loose (e.g., in case of long time intervals). Also, more crucially for the purpose of ranking controlcosts for different scenarios, an L1-optimal cost ranking may not be preserved under the L2 cost.That is, consider two scenarios A and B, and let ∆V opt
L1,Aand ∆V opt
L1,Bdenote their L1-optimal ∆V
costs. Similarly, let the optimal quadratic costs be denoted as ∆V optL2,A
and ∆V optL2,B
. Then, an order-ing ∆V opt
L1,A6 ∆V opt
L1,Bdoes not necessarily imply that ∆V opt
L2,A6 ∆V opt
L2,B! A counterexample
illustrating this effect is presented later in the results section.
Computing the optimal control law for connecting two state estimates is in general a nonlinearcontinuous-time optimization problem. In the next section, we discuss our formulation and onespecific method of solving the resulting problem.
∗If x = (x, y, z, x, y, z) denotes ECI coordinates, then B = [03×3, I3×3]T .
5

CONTINUOUS-TIME OPTIMAL CONTROL
We begin by specifying the form of our optimal control problem. Let x(t) and u(t) denote thestate and control, respectively, at time t. For notational convenience, we will suppress the timedependence when it is clear from context. The optimization problem is
Minimizex,u
∆V =
∫ tf
t0
√u(t)Tu(t) dt
Subject To x′(t) = f(x(t),u(t), t),
g(x(t0),x(tf )) = 0.
(3)
In a more general setting, we can also have path constraints on the state and control. We will notconsider path constraints for our present application (the methods, however, easily carry over if wedo). We consider fully specified initial and final states (x0 and xf , respectively) at fixed initial andfinal times as our boundary conditions. Thus, the function g is the following:
g(x(t0),x(tf )) =
[x(t0)− x0
x(tf )− xf
].
In general, instead of a final state, we may have a final measurement boundary condition z(tf ) =h(x(tf )), where h is the measurement function. The problem in (3) is a very general nonlinear opti-mal control problem and, as such, has been studied extensively in the control theory literature. Thetraditional approach from calculus of variations10 is to apply the Pontryagin minimum principle,where the continuous necessary conditions for optimality are first derived and a resulting two-pointboundary value problem is solved. The approach we take here belongs to a more recent and increas-ingly popular class of methods that have come to be known as “direct” methods. The general idea indirect methods for optimal control involves a discretization of the original continuous-time problemthat results in a nonlinear programming (NLP) problem,11 which is then solved via known NLPsolution techniques such as sequential quadratic programming (SQP) or interior point methods. Inwhat follows, we briefly discuss the discretization method and the resulting NLP formation for ourcontrol problem. We acknowledge that the treatment here has been adapted from Refs. [12,13] to ourspecific problem. Finally, we also acknowledge the work done by Holzinger and Scheeres,3 wherethey use an indirect approach to compute energy-optimal trajectories (as opposed to fuel-optimaltrajectories).
Huber Approximation to the ∆V Objective
As noted above, the ∆V objective function is non-differentiable at u = 0 and, as a result,traditional “indirect” methods are difficult to apply. In our “direct” transcription approach, however,we can directly use a smooth approximation to the true objective function. Specifically, we proposeto apply the Huber approximation:7
L(u; ε) =
‖u‖2, if ‖u‖2 > ε,
α‖u‖22 + β, if ‖u‖2 6 ε.
For smoothness, we choose α = 12ε and β = ε
2 . A choice of ε = 10−8 was found to be appropriatefor our purpose here and it is assumed henceforth. Our results show that the resulting approxi-mation provides a control solution that is very close to optimal in terms of ∆V . As a result, weobtain more accurate estimates of the ∆V effort required to connect two given states. In addition,
6

for well-studied simple maneuvers, the control profiles obtained via our approximation are verysimilar to known analytical solutions. Due to the piecewise definition of the Huber approximation,for notational convenience we will refer to the integrand in the ∆V cost functional (1) as simplyL(u; ε).
Gauss Pseudospectral Discretization and NLP Formulation
As mentioned above, the first step in a “direct” solution method is to discretize the originalcontinuous-time problem into a NLP. Choice of an appropriate discretization scheme for form-ing a NLP is critical and several schemes have been studied in the control theory literature. Forour results here, we use the Gauss pseudospectral (GS) discretization framework,14 one of severalorthogonal collocation methods used in direct methods for optimal control. The overall schemehas three key advantages: (i) it leads to efficient approximations to the integral defining the cost,the differential equation constraint, and the path constraints; (ii) it provides an accurate estimateof the costate which provides an equivalence with traditional indirect methods10 and facilitates asensitivity analysis of the extremal trajectory; and (iii) it provides a convenient way to address thenon-smoothness of the ∆V objective function. This framework is robust and sufficiently generalto accommodate the use of higher-order gravity models, non-conservative forces, general boundaryconditions and path constraints, spacecraft specific thrust models and parameters (as determinedpossibly by feature extraction from the observations), and allows use of powerful techniques fromnonlinear programming. We now describe the method for discretizing the problem in (3). In whatfollows, the discretization points ti, i = 1, . . . , N , are the Legendre-Gauss (LG) points∗ on the timeinterval (t0, tf ); t0 denotes the endpoint t0 and tN+1 denotes the endpoint tf . The state x(t) isapproximated as
x(t) ≈ x(t) =
N∑i=0
x(ti)`i(t), (4)
where `i(t), i = 0, . . . , N , are the Lagrange interpolating polynomials defined as
`i(t) =N∏
j=0,j 6=i
t− tjti − tj
. (5)
The control u(t) is discretized in a similar fashion, with one key difference being that it is notapproximated directly at the endpoint t0:
u(t) ≈ u(t) =N∑i=1
u(ti)`∗i (t), (6)
where again
`∗i (t) =N∏
j=1,j 6=i
t− tjti − tj
(7)
are the Lagrange interpolation polynomials (note that the `∗i (t) in (7) are different from the `i(t) in(5) due to the inclusion of the endpoint t0 in (5)).
∗The Legendre-Gauss points are usually provided for the interval [−1, 1] and are precisely the roots of the N th-degreeLegendre polynomial. The corresponding LG points on an arbitrary interval can be obtained from those on [−1, 1] throughan affine transformation.
7

Differentiating (4), we obtain the discretization of the state derivative:
x′(t) ≈ x′(t) =
N∑i=0
x(ti)d`i(t)
dt.
For notational convenience, we denote the derivative of the Lagrange polynomials at the LG pointsas a differentiation matrix D ∈ RN×N+1, with elements
Dki = `′i(tk), k = 1, . . . , N, i = 0, . . . , N. (8)
These elements can be determined offline. The continuous-time cost and dynamics can now beapproximated using classical Gaussian quadrature methods using the LG points. Putting everythingtogether, we obtain the following finite-dimensional NLP:
Minimizex,u,x0,xf
∆V =N∑k=1
wk L(uk; ε)
Subject To Xdk − f(xk, uk, tk) = 0, k = 1, . . . , N,
xf = x0 +
N∑k=1
wkf(xk, uk, tk),
g(x0, xf ) = 0.
(9)
Here, wk are the LG quadrature weights, tk are the LG points, X is the matrix with x1, . . . , xN ,as its columns, dTk denotes the kth row of the differentiation matrix D, xk ≡ x(tk) ∈ R6, anduk ≡ u(tk) ∈ R3. Further, x0 ≡ x(t0) and xf = x(tf ) = x(tN+1). Note that xf is not acollocated point and is instead defined in terms of x0 via the discretized dynamics; this results inthe second constraint in (9). The end goal for this NLP formulation is to be able to use powerfultechniques from nonlinear programming to get accurate approximations to a solution to the originalcontinuous-time problem. An advantage of the particular discretization procedure described here isthat accurate costate estimates can be obtained from the Lagrange multipliers arising in the Karush-Kuhn-Tucker (KKT)11 conditions of the NLP. A costate mapping theorem that formalizes this isprovided in Ref. [12].
TREATMENT OF UNCERTAINTY IN THE BOUNDARY CONDITIONS
The optimal control computation described in the previous sections connects two point stateestimates x(t0) and x(tf ). In practice, these state estimates would usually be the output of a batchestimation (orbit determination) process, and thus would have some uncertainty associated withthem. As already discussed in the problem statement section, we wish to compute the distributionof ∆V ≡ ∆V (X), which is a complicated transformation since the mapping involves solving anoptimal control problem. We note again here that X ∼ N (µ,P), where X ≡ (X0,Xf ). Further,X0 ∼ N (x0,P0) is the initial state distribution, Xf ∼ N (xf ,Pf ) is the final state distribution,and µ = (x0,xf ) and P = diag(P0,Pf ).
Computing a Representation for the Control Cost Distribution
The Unscented Transform and Gauss-Hermite Quadrature The overview here is taken from themore detailed treatment provided in Ref. [15]. The unscented transform9, 16 and Gauss-Hermite
8

(GH) quadature rules are intimitely related. Starting with the n-variate Gaussian X ∼ N (µ,P)(n = 12 in our case) and a nonlinear transformation f : Rn → Rn, the unscented transformapproximates the mean and covariance of the transformed variable f(X) correct to third-order. Inother words, the unscented transform provides a means of integrating the function f multipliedby a Gaussian weight function. Gauss-Hermite quadrature effectively approximates the integral byevaluating the function f at strategically chosen sigma points (or nodes) and then taking a weightedaverage.
Families of GH quadrature rules for integration over R can be readily derived using the Golub-Welsch algorithm17 as follows. Let J ∈ Rm×m be the tridiagonal symmetric matrix with Jα,α+1 =Jα+1,α =
√α, α = 1, . . . ,m− 1, and Jα,α = 0, α = 1, . . . ,m. Then,
1√2π
∫ ∞−∞
e−12x2f(x) dx ≈
m∑α=1
wαf(xα), (10)
is a (2m − 1)-th order accurate quadrature rule (i.e., it is exact if f(x) is any polynomial up toand including degree 2m − 1). Here, the nodes xα are the eigenvalues of J while the weights wαare given by [(vα)1]2, where (vα)1 is the first component of the α-th normalized eigenvector ofJ. A quadrature rule in n dimensions can be formed by taking the n-fold Cartesian product of theone-dimensional GH rule so that
1
(2π)n/2
∫Rn
e−12xTxf(x) dnx ≈
m∑α1=1
· · ·m∑
αn=1
wα1 · · ·wαn f(xα1 , . . . , xαn). (11)
By an affine change of variable, functions multiplied by an arbitrary Gaussian weight function canalso be integrated:
E[f(X)] =
∫Rn
N (x;µ,P)f(x) dnx ≈∑xα∈Ω
wαf(µ+ Axα). (12)
In (12), Ω ⊂ Rn denotes the set of GH nodes, wα is the weight associated to the α-th node in Ω,and P = AAT . The set µ + Axαxα∈Ω is precisely the set of sigma points for a Gaussian withmean µ and covariance P. This connection between GH quadrature rules and the unscented sigmapoints was also observed by Ito and Xiong.18
The quadrature schemes (11) and (12) are order 2m− 1 accurate but require mn function evalu-ations when the Cartesian product node set Ω is used. This establishes the curse of dimensionality;for fixed order, the number of nodes grows exponentially with dimension. The choice of more effi-cient node sets Ω, in particular, ones in which the cardinality grows polynomially with dimension, isthus of primary importance in quadrature theory and ultimately in the implementation of an efficientGH (i.e., higher-order unscented) filter.
Multidimensional Gauss-Hermite quadrature schemes which have a minimal number of nodesrequired to achieve a given accuracy are developed by Genz and Keister19 (GK). The resultingquadrature rules∗ enjoy the property that the number of nodes grows only polynomially with di-mension when the order is fixed. For example, the number of nodes (sigma points) for third- andfifth-order GH-GK quadrature methods is 2n + 1 and 2n2 + 1, respectively. In contrast, thesenumbers become 2n and 3n, respectively, when the naive Cartesian product node set is assumed.
∗The Genz-Keister nodes and weights can be downloaded at http://sparse-grids.de.
9

In our approach here, we first estimate the mean and variance of the transformation ∆V (X0,Xf ),and then fit a shifted Gamma distribution via moment matching. The first and second moments ofthe ∆V random variable are estimated as
µ∆V =∑xi∈Ω
wi∆V (xi), (13)
andσ2
∆V=∑xi∈Ω
wi(∆V (xi)− µ∆V )2, (14)
In the results section, we show several examples using fifth-order (289 σ-points) and seventh-order(2097 σ-points) Gauss-Hermite quadrature. For comparison, we also show the histogram of the∆V -optimal cost computed from 10,000 independent Monte Carlo (MC) runs. Note, however,that the MC runs are only computed to more accurately approximate “truth.” We would nevertry to estimate the Gamma distribution parameters using such a large MC sample as it would becomputationally infeasible in an online setting. The unscented transform, on the other hand, iscomputationally feasible, since not only do we have a reduced set of sample points, we also have agood estimate of the optimal control and ∆V cost for each σ-point based on the nominal trajectory.Warm starting the NLP with this solution makes the solution much easier to obtain as the numberof iterations is significantly reduced.
Fitting a Parametric Distribution
For the results presented in this paper, we fit a shifted Gamma distribution to the computed firsttwo moments of the ∆V random variable via Gauss-Hermite quadrature as defined in (13) and (14).Specifically, we use simple moment matching to fit the shape and scale parameters of a Gammadistribution (the choice of fitting a Gamma distribution was made after qualitative goodness-of-fitexperiments with several popular parametric distributions). That is, we approximate the distributionof the ∆V random variable as ∆V ∼ Γ(k, θ, δ), where k > 0 is the shape parameter, θ > 0 is thescale parameter, δ > 0 is the shift parameter, and
Γ(x; k, θ, δ) =
(x− δ)k−1 e−(x−δ)/θ
Γ(k)θk, x > δ
0, x < δ(15)
The shift parameter δ is taken to be the nominal control cost (the cost connecting the mean initial andfinal states). By moment matching, the parameters k and θ satisfy kθ + δ = µ∆V and kθ2 = σ2
∆V.
Testing for Maneuver Feasibility and Comparing Candidate UCT Associations
The proposed hypothesis test for determining feasibility of a maneuver is a test between the nullhypothesis H0 that the maneuver is feasible and the alternate hypothesis Ha that the maneuver isinfeasible. Further, we decide that
• H0 is accepted if P (∆V 6 ∆V th) > 1− α, (otherwiseH0 is rejected),
where α is a significance level (e.g., 0.05), and ∆V th is a threshold chosen by the operator.
For scoring (and hence, ranking) UCT associations based on maneuver feasibility, the idealmethod is to incorporate the measure of maneuver feasibility into the likelihood scores that are
10

an integral component of a MHT. A rigorous derivation of the likelihood ratios for scoring is givenin Poore2 and will be not be repeated here. We note in particular that PA(∆V 6 ∆V th) is to beviewed as the “probability of a maneuver” (in the absence of any other predictors/variables that mayindicate information about possible maneuvers), and this term would arise as part of the likelihoodratios in a MHT track stitching stage (in addition to the prediction error term). For a simplisticcomparison that we use here, the following is used to compare a candidate UCT pairing A with acandidate pairing B, in the absence of any other data and all aspects (except for the optimal controlprofile and cost behavior) being equal for the candidate pairings:
• UCT pair A wins over pair B if PA(∆V 6 ∆V th) > PB(∆V 6 ∆V th).
Equivalently, we use the CDF of the fitted Gamma distribution to compute UCT pairing scores.Note that the above comparison assumes a fixed ∆V th. The inequality may not hold for all possiblevalues of ∆V th. At the end of the results section, it will be shown that accurate estimates of thecontrol cost distribution are critical in this framework for making the right correlation decision. Inparticular, using different cost functionals (e.g., using quadratic cost instead of the ∆V cost) couldresult in different associations.
RESULTS
We now present results on several simulated scenarios to validate the above outlined methodologyfor the nominal control computations and treatment of uncertainties via the unscented transform. Wealso show a simple UCT association scenario, in which using the computational easier L2 optimalcontrol framework instead of the more physically realistic L1 cost can lead to a wrong association.
In all scenarios, we simulate a set of “truth” trajectories consisting of an initial and final state,and attempt to recover the ∆V -optimal controls (and their distributions) that connects the two states.The mean initial state x0 is a circular, non-inclined orbit in GEO, with instantaneous orbital periodof 24 hours. The mean final state xf is generated by propagating x0 for 24 hours, with a maneuveroccurring during part of the propagation interval. We use a degree and order 70 gravity model tosimulate the initial and final conditions in all scenarios. Unless indicated otherwise, the states arerepresented in ECI coordinates with length in units of Earth radii (ER) and time in units of hours.
Nominal ∆V -Optimal Control Computation
To test and validate the Gauss pseudospectral approach combined with the Huber approximationto the L1 cost, we consider the following scenarios:
• Nominal control computation scenarios. In Scenarios 1imp, 2imp, and 3imp, an impulsivemaneuver of magnitude ∆Vtrue = 2 m/s is conducted along the z-direction at t = 0, 24, and12 hr, respectively. Scenario 4imp is defined analogously with an impulse time at t = 15 hrand ∆Vtrue = 5 m/s. In Scenarios 1sb, 2sb, and 3sb, a constant thrust slow-burn maneuverof magnitude 10−7 km/s2 is conducted along the radial direction over the intervals [0, 24 hr],[0, 12 hr], and [12 hr, 24 hr], respectively. Scenario 4sb is identical to Scenario 1sb but uses alarger thrust of 10−6 km/s2.
We use the open-source General Pseudospectral Optimal Control Software (GPOPS)20 to tran-scribe our control problem (using N = 30 LG points) into an NLP as described in the previous
11

Table 1. Computed values of ∆V using the J = P (energy) and J = ∆V (total velocity increment)cost functions.
Scenario ∆V true(m/s)
∆V est,J=P(m/s)
∆V est,J=P(m/s)
∆V est,J=∆V(m/s)
∆V est,J=∆V(m/s)
31 LG pts 61 LG pts 31 LG pts 61 LG pts
1imp 2 2.6112 2.6044 2.0460 2.04652imp 2 2.6115 2.6046 2.0462 2.04673imp 2 2.4993 2.5031 1.9702 1.96664imp 5 6.1965 6.1957 4.8743 4.86861sb 8.64 8.6311 8.6311 8.6296 8.62992sb 4.32 4.7426 4.7426 4.3113 4.31173sb 4.32 4.6662 4.6661 4.3129 4.31294sb 86.4 86.3756 86.3756 86.3671 86.3671
section, and use the general purpose solver SNOPT21 to solve the NLP via sequential quadraticprogramming. The NLP solved in all simulations uses ECI coordinates and a J2 gravity model.
For all scenarios here, we compare the optimally estimated ∆V effort with the true ∆V effort.For the impulsive maneuver scenarios, we simply use the impulse magnitude as the ∆V true. For theconstant thrust scenarios, we compute the ∆V true by simply integrating the thrust magnitude overthe given time interval via ∆V true =
∫ tft0Adt = A(tf − t0), where A is the constant thrust mag-
nitude. In order to compare to prior work of Holzinger and Scheeres,3 we also solve the analogouscontrol problem using the energy (2) as the cost function.
Table 1 lists the computed values of ∆V obtained by solving the two different control problems.We denote the ∆V estimate obtained from the ∆V solution as ∆Vest,J=∆V , and the estimate ob-tained from the minimum energy solution by ∆Vest,J=P . The table also compares results obtainedby using 31 and 61 LG points. In summary, the results obtained by using only 31 LG points iscomparable to those obtained using 61 LG points, and the results match the theoretical predictionvery well. Further, although the minimum energy control problem is easier to solve, it tends tooverestimate the actual ∆V by as much as 30%, which can be a significant overestimate for spaceobject maneuvers. The consequence of this is shown in the UCT association scenario later, whereusing the energy cost functional leads to the wrong association while using the ∆V cost functionalleads to the right association.
Figure 4 shows the control functions obtained for Scenario 3sb. The qualitative differences in thecontrol function for the minimum energy and ∆V solutions are significant. While the optimal con-trol for the minimum energy solution is smooth, the minimum ∆V solution implies that the optimal(most fuel efficient) control is a series of impulsive maneuvers. Therefore, a slow-burn maneuver isnot necessarily fuel efficient in terms of ∆V cost! Similar observations are also apparent in Figure 5showing the control functions obtained for Scenario 4imp. In addition, one of the impulses in theminimum ∆V solution coincides precisely with the actual time of the maneuver. This observationsuggests that one can possibly infer the type of maneuver from the optimal control and the computed∆V .
Comparison with Theory: Inclination/Plane Change Maneuvers Finally, we test our methodon the well-studied inclination-only change maneuver. We consider a series of scenarios in which
12

0 5 10 15 20
−2
−1
0
1
2
x 10−4
Time (hr)
u∗ (t)
(ER/h
r2)
ux(t)
uy(t)
uz(t)
0 5 10 15 20
−6
−4
−2
0
2
4
6
x 10−3
Time (hr)
u∗ (t)
(ER/h
r2)
ux(t)
uy(t)
uz(t)
Figure 4. The optimal control profile obtained for Scenario 3sb. Shown are the mini-mum energy solution (left) and the minimum ∆V solution (right).
0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4x 10
−4
Time (hr)
u∗ (t)
(ER/h
r2)
ux(t)
uy(t)
uz(t)
0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4x 10
−3
Time (hr)
u∗ (t)
(ER/h
r2)
ux(t)uy(t)uz(t)
Figure 5. The optimal control profile obtained for Scenario 4imp. Shown are theminimum energy solution (left) and the minimum ∆V solution (right).
the object conducts an impulsive maneuver in the z-direction of magnitude ∆Vtrue = 5 m/s att = timpulse ∈ [0, 24 hr]. With a circular non-inclined orbit as the initial state (as before), andassuming unperturbed Keplerian dynamics, such a maneuver would result in a change in inclinationonly. The optimal ∆V required is given by ∆Vtheory = 2v sin
(∆i2
)(see [Ref. 22, §6.4.2]), where
∆i is the change in inclination between the initial and final states, and v is the orbital velocity.Figure 6 shows that the theoretically predicted ∆V versus timpulse curve agrees well with estimatesobtained from the Huber approximated solution (using as little as 31 LG points), while the estimatesobtained from the minimum energy solution are higher by as much as 30%. The sinusoidal shapeis due to the fact that the change in inclination ∆i itself oscillates as a function of the impulse timetimpulse due to the inclusion of higher-order terms in the gravity model. Figure 5 shows an exampleoptimal control profile obtained for such a maneuver.
13

0 5 10 15 204.8
4.85
4.9
4.95
5
5.05
5.1
5.15
timpulse (hr)
∆V
est(m
/s)
Theoretical Prediction∆V est, 31 LG pts∆V est, 61 LG pts∆V est, 97 LG pts
0 5 10 15 204.5
5
5.5
6
6.5
7
timpulse (hr)
∆V
est(m
/s)
Theoretical Prediction
∆V est
∆V est (min P solution)
Figure 6. Comparison of ∆V (estimates vs. theoretical prediction) obtained forinclination-only maneuvers (left), and comparison with estimates obtained from mini-mum “energy” solution (right). The sinusoidal shape is due to the fact that the changein inclination ∆i itself oscillates as a function of the impulse time due to the gravitymodel.
0 5 10 15 20 25−0.02
−0.01
0
0.01
0.02
Time (hr)
u∗ (t)
(ER/h
r2)
Control Profile Distribution
ux(t)
uy(t)
uz(t)
0 5 10 15 20 25−4
−2
0
2
4x 10
−3
Time (hr)
u∗ (t)
(ER/h
r2)
Control Profile Distribution
ux(t)
uy(t)
uz(t)
Figure 7. Samples of ∆V -optimal control profiles for Scenarios 3sb and 10.
∆V Cost Distribution Computation
In the next set of scenarios, we consider uncertainty in the boundary states. Several sizes ofuncertainties are considered to test robustness of the proposed approach based on the unscentedtransform. Following is a brief description of the scenarios:
• Control cost distribution computation scenarios. In Scenarios 1 to 8, an impulsive maneuverof magnitude ∆Vtrue = 2 m/s is conducted along the z-direction at t = 7 hr. These scenariosdiffer only in terms of their initial and final state uncertainties, which are provided in Tables 2and 3. In Scenario 9, no maneuver is conducted, and in Scenario 10, an impulsive maneuverof magnitude ∆Vtrue = 5 m/s is conducted along the z-direction at t = 7 hr.
The goal in these scenarios is to compute the distribution of the ∆V -optimal control cost connect-ing the initial and final state distributions. For all cases, the covariance P = diag
(σ2x, σ
2y , σ
2z , σ
2.x, σ2
.y, σ2
.z
),
with the values given in Tables 2 and 3.
14

Table 2. Initial state uncertainties
Scenario σx(m)
σy(m)
σz(m)
σ .x(m/s)
σ .y(m/s)
σ .z(m/s)
1 300 250 225 3.0 3.5 3.52 60 30 40 0.4 0.8 0.83 3,000 3,000 3,000 1.0 1.0 1.04 10,000 10,000 10,000 1.0 1.0 1.05 2,000 2,000 2,000 5.0 5.0 5.06 10,000 10,000 10,000 5.0 5.0 5.07 200 150 100 5.0 1.0 1.08 200 150 100 1.0 5.0 1.09 150 200 100 1.0 2.0 1.010 150 200 100 1.0 2.0 1.0
Table 3. Final state uncertainties
Scenario σx(m)
σy(m)
σz(m)
σ .x(m/s)
σ .y(m/s)
σ .z(m/s)
1 250 300 250 4.5 5.0 4.02 80 60 60 0.6 1.0 1.03 3,000 3,000 3,000 1.0 1.0 1.04 10,000 10,000 10,000 1.0 1.0 1.05 2,000 2,000 2,000 5.0 5.0 5.06 10,000 10,000 10,000 5.0 5.0 5.07 200 150 100 5.0 1.0 1.08 200 150 100 1.0 5.0 1.09 200 100 150 1.0 1.0 2.010 200 100 150 1.0 1.0 2.0
Figures 8-12 show comparisons between a 10,000 sample Monte Carlo histogram (normalizedsuch that the area under the histogram is unity), and a fifth-order and seventh-order Gauss-Hermitequadrature based Gamma distribution fit. The plots show that the fifth-order fits achieve reasonableaccuracy while the seventh-order fits match more closely with the histograms. Further, comparingthe spread of the computed ∆V distributions with the state uncertainties in Tables 2 and 3, we seethat the variances in the velocity coordinates have a larger effect on the ∆V variances (compare,e.g., Scenarios 4 and 6). Finally, Figure 7 shows samples of the actual optimal control profiles forthe slow-burn case in Scenario 3sb and the impulsive maneuver case in Scenario 10, with initial andfinal state uncertainties equal to those of Scenario 2. As can be seen, the approximate nature of themaneuver can still be reconstructed.
UCT Association Cost Comparision (∆V vs. Quadratic Cost)
We now consider a simple UCT association scenario. Assume that we have an initial X0 (sameas the initial state of all previous scenarios), and two given final states X1
f and X2f . In the absence
15

0 5 10 15 20 25 300
0.02
0.04
0.06
0.08
0.1
0.12
∆V (m/s)
f ∆V(∆
V)
Scenario 1
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
∆V (m/s)
f ∆V(∆
V)
Scenario 2
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
Figure 8. ∆V distributions for Scenarios 1 and 2.
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
∆V (m/s)
f ∆V(∆
V)
Scenario 3
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
∆V (m/s)
f ∆V(∆
V)
Scenario 4
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
Figure 9. ∆V distributions for Scenarios 3 and 4.
of any other data and all observed and unobserved aspects of the states being equal, we assumethat one of X1
f or X2f was generated by the inital state, and apply the UCT association scoring
formulation described earlier to determine which association is more feasible in terms of fuel cost(and hence is the correct one by assumption). The results are shown for the case where the meanstate x1
f is identical to the final state of the slow-burn Scenario 3sb described earlier, and the meanx2f is the final state obtained by conducting a maneuver of magnitude ∆Vtrue = 4 m/s along the
z-direction at t = 0 hr. The covariances for all states are diagonal. For the initial stateX0, we have
σx = 60 m, σy = 30 m, σz = 40 m, σ .x = 0.3 m/s, σ .y = 0.4 m/s, σ .z = 0.4 m/s,
and for both final statesX1f andX2
f , we have
σx = 80 m, σy = 60 m, σz = 60 m, σ .x = 0.6 m/s, σ .y = 0.4 m/s, σ .z = 0.6 m/s.
Figures 13 and 14 show the computed PDFs and CDFs for the two possble associations, usingthe ∆V cost functional and the quadratic cost functional in the optimal control computation (thedistribution for the quadratic cost case is still shown in ∆V space however; i.e., the L1-norm of theL2-optimal solution is used in computing the distribution). In the figures, the candidate associationX0 → X1
f is denoted as A→ B, and the candidate association X0 → X2f is denoted as A→ C.
16

0 5 10 15 20 25 300
0.02
0.04
0.06
0.08
0.1
0.12
∆V (m/s)
f ∆V(∆
V)
Scenario 5
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
∆V (m/s)
f ∆V(∆
V)
Scenario 6
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
Figure 10. ∆V distributions for Scenarios 5 and 6.
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
∆V (m/s)
f ∆V(∆
V)
Scenario 7
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
0 5 10 15 20 25 300
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
∆V (m/s)
f ∆V(∆
V)
Scenario 8
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
Figure 11. ∆V distributions for Scenarios 7 and 8.
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
∆V (m/s)
f ∆V(∆
V)
Scenario 9
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
0 5 10 15 20 25 300
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
∆V (m/s)
f ∆V(∆
V)
Scenario 10
Monte Carlo HistogramGamma fit (MC)Gamma fit (GH order 5)Gamma fit (GH order 7)
Figure 12. ∆V distributions for Scenarios 9 and 10.
17

0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
∆V (m/s)
f ∆V(∆
V)
Association Scenario (∆V cost)
A → B (histogram)A → C (histogram)A → B (Gamma fit)A → C (Gamma fit)
0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
∆V (m/s)
f ∆V(∆
V)
Association Scenario (quadratic cost)
A → B (histogram)A → C (histogram)A → B (Gamma fit)A → C (Gamma fit)
Figure 13. ∆V distributions (PDF) for the UCT association scenarios (Scenarios 11and 12). The figures show that the order of the distributions for the two candidatepairings switches if quadratic cost is used instead of the ∆V cost.
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
∆V (m/s)
F∆
V(∆
V)
Association Scenario (∆V cost)
A → B (Gamma fit)A → C (Gamma fit)
0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
∆V (m/s)
F∆
V(∆
V)
Association Scenario (quadratic cost)
A → B (Gamma fit)A → C (Gamma fit)
Figure 14. ∆V distributions (CDF) for the UCT association scenarios (Scenarios 11 and 12.
18

The nominal cost for associationA→ C is 4.32 m/s while the nominal cost for associationA→ Bis 4 m/s. As can be seen, in this case using the quadratic cost results in switching the order of thetwo distributions. The CDF plots in particular show that for most values of ∆V th, the two costfunctionals would result in different decisions being made (with the ∆V cost resulting in the rightone).
CONCLUSIONS
In summary, the theory of optimal control in conjunction with the Gauss pseudospectral methodprovides a robust framework for maneuver detection and validation in the context of UCT reso-lution. A key feature of the proposed method is the use of the total velocity increment ∆V as acost function for evaluating the effort needed for a given maneuver. While alternate cost functionssuch as energy (2) can result in simpler control problems due to the absence of singularities in theobjective function, a framework which uses ∆V is preferable because (i) the singularity issues canbe resolved using the Huber approximation, (ii) it provides an accurate estimate of the ∆V effortand the correct optimal control when validated against analytically known solutions (whereas theminimum energy solution can overestimate the control effort significantly (by as much as 30% inour simulations)), and (iii) it produces a meaningful cost which can be compared to catalogs of ∆Vdata for known spacecraft. Further, the ∆V framework is robust and sufficiently general to accom-modate the use of higher-order gravity models, non-conservative forces, and more general boundaryconditions and path constraints.
We also demonstrated that the unscented transform and its higher-order versions provide an ef-ficient way to approximate the first two moments of the control cost distribution in the case ofuncertain boundary conditions, and a shifted Gamma distribution provides a good parametric fit tothe actual PDF and CDF of the ∆V random variable. The method was found to be robust to a widerange of uncertainties in the boundary conditions. Finally, in a UCT association scenario considered,it was shown that using the actual ∆V cost functional in the optimal control problem, (i.e., solvingan L1 optimal control problem) is important for computing an accurate ∆V cost distribution, whichin turn is critical in making the correct fuel-cost based UCT association decision.
ACKNOWLEDGMENTS
This work was funded by a Phase I SBIR from the Air Force Research Laboratory (AFRL), RomeNY (FA8750-11-C-0147), a Phase II SBIR from AFRL, Kirtland AFB (FA9453-11-C-0153), and agrant from the Air Force Office of Scientific Research (FA9550-11-1-0248). The authors also thankDr. Marcus Holzinger and Dr. Scott Miller for useful discussions.
REFERENCES
[1] K. T. Alfriend, “A dynamic algorithm for the processing of UCTs,” AIAA/AAS Astrodynamics Confer-ence 1997, Sun Valley, ID, August 1997. Paper AAS-97-607.
[2] A. B. Poore, “Multidimensional assignment formulation of data association problems arising from mul-titarget tracking and multisensor data fusion,” Computational Optimization and Applications, Vol. 3,1994, pp. 27–57.
[3] M. J. Holzinger and D. J. Scheeres, “Object correlation, maneuver detection, and maneuver charac-terization using control effort metrics with uncertain boundary conditions and measurements,” AIAAGuidance, Navigation and Control Conference 2010, Toronto, Canada, August 2010.
[4] Y. Bar-Shalom, X.-R. Li, and T. Kirubarajan, Estimation with Applications to Tracking and Navigation.New York: John Wiley & Sons, 2001.
19

[5] R. Hujsak and S. Reed, “A multiple models solution for real-time tracking of maneuvering satellites,”White Paper, Analytical Graphics Inc., October 2008.
[6] I. Michael and Ross, “Space trajectory optimization and L1-optimal control problems,” Modern As-trodynamics (P. Gurfil, ed.), Vol. 1 of Elsevier Astrodynamics Series, pp. 155 – VIII, Butterworth-Heinemann, 2007, 10.1016/S1874-9305(07)80008-2.
[7] P. J. Huber, “Robust regression: Asymptotics, conjectures and Monte Carlo,” Annals of Statistics, Vol. 1,No. 5, 1973, pp. 799–821.
[8] D. F. Lawden, Optimal Trajectories for Space Navigation. Butterworths Mathematical Texts, London:Butterworths, 1963.
[9] S. J. Julier, J. K. Uhlmann, and H. F. Durant-Whyte, “A new method for the nonlinear transformationof means and covariances in filters and estimators,” IEEE Transactions on Automatic Control, Vol. 55,2000, pp. 477–482.
[10] A. E. Bryson and Y. Ho, Applied Optimal Control. Levittown, PA: Taylor & Francis, 1975.[11] R. Fletcher, Practical Methods of Optimization. Chichester: John Wiley & Sons, 1991.[12] D. A. Benson, G. T. Huntington, T. P. Thorvaldsen, and A. V. Rao, “Direct trajectory optimization and
costate estimation via an orthogonal collocation method,” Journal of Guidance, Control, and Dynamics,Vol. 29, No. 6, 2006, pp. 1435–1440.
[13] G. T. Huntington, Advancement and Analysis of a Gauss Pseudospectral Transcription for OptimalControl Problems. PhD thesis, Massachusetts Institute of Technology, 2007.
[14] D. A. Benson, A Gauss Pseudospectral Transcription for Optimal Control. PhD thesis, MassachusettsInstitute of Technology, 2004.
[15] J. T. Horwood, N. D. Aragon, and A. B. Poore, “Covariance consistency for track initiation using Gauss-Hermite quadrature,” Proceedings of the 2010 Signal and Data Processing of Small Targets, Orlando,FL, April 2010.
[16] S. J. Julier and J. K. Uhlmann, “Unscented filtering and nonlinear estimation,” Proceedings of the IEEE,Vol. 92, 2004, pp. 401–422.
[17] G. H. Golub and J. H. Welsch, “Calculation of Gauss quadrature rules,” Mathematics of Computation,Vol. 23, 1969, pp. 221–230, A1–A10.
[18] K. Ito and K. Xiong, “Gaussian filters for nonlinear filtering problems,” IEEE Transactions on Auto-matic Control, Vol. 45, No. 5, 2000, pp. 910–927.
[19] A. Genz and B. D. Keister, “Fully symmetric interpolatory rules for multiple integrals over infiniteregions with Gaussian weight,” Journal of Computational and Applied Mathematics, Vol. 71, 1996,pp. 299–309.
[20] A. V. Rao, D. A. Benson, C. Darby, M. A. Patterson, C. Francolin, I. Sanders, and G. T. Huntington,“Algorithm 902: GPOPS, A MATLAB software for solving multiple-phase optimal control problemsusing the Gauss pseudospectral method,” ACM Transactions on Mathematical Software, Vol. 37, April2010, pp. 22:1–22:39, http://doi.acm.org/10.1145/1731022.1731032.
[21] P. E. Gill, W. Murray, and M. A. Saunders, “SNOPT: An SQP algorithm for large-scale constrainedoptimization,” SIAM Review, Vol. 47, No. 1, 2005, pp. 99–131.
[22] D. A. Vallado, Fundamentals of Astrodynamics and Applications. New York: Springer, 2007.
20
![· K]01enqe-l pape]luooqns UOII!PUOO Isa 1 pape'luooqns uompuoa 8 Xiptlõddv L aas 9 x!puaddv aas g X!puaddv aas xvpuaddv aas X!puaddv aas x !puoddv aas 1 xvpuoddv aas llnsa8 uo!taas](https://img.dokumen.tips/doc/110x75/5fd8f48630ab410c3c31d136/k01enqe-l-papeluooqns-uoiipuoo-isa-1-papeluooqns-uompuoa-8-xiptlddv-l-aas.jpg)