Embed Size (px)
Citation preview

82
หนวยการเรยนรท 4
พนฐานและหลกการเขยน เอน ซ โปรแกรม

83
หนวยการเรยนรท 4 พนฐานและหลกการเขยน เอน ซ โปรแกรม
1. สาระการเรยนร 1. พนฐานการเขยนเอน ซ โปรแกรม 2. การก าหนดต าแหนงการเคลอนท 3. การก าหนดต าแหนงของจดโดยใชโปรแกรม 4. คณตศาสตรส าหรบการโปรแกรม 5. การก าหนดต าแหนงการเคลอนทแบบสวนโคงของวงกลม
2. จดประสงคการเรยนร 1. เพอใหผเรยนมความรและความเขาใจเกยวกบพนฐานการเขยนเอน ซ โปรแกรม 2. เพอใหผเรยนมความรและความเขาใจเกยวกบการก าหนดต าแหนงการเคลอนท 3. เพอใหผเรยนมความรและความเขาใจเกยวกบการก าหนดต าแหนงของจดโดยใชโปรแกรม 4. เพอใหผเรยนมความรและความเขาใจเกยวกบคณตศาสตรส าหรบการโปรแกรม 5. เพอใหผเรยนมความรและความเขาใจเกยวกบการก าหนดต าแหนงการเคลอนทแบบสวนโคงของวงกลม 6. เพอใหผเรยนมกจนสยในการท างานทมระเบยบแบบแผนมความรบผดชอบตอตนเองและสวนรวม
3. ผลการเรยนรทคาดหวง 1. ผเรยนสามารถก าหนดต าแหนงการเคลอนทแบบสมบรณได 2. ผเรยนสามารถก าหนดต าแหนงการเคลอนทแบบสมพทธได 3. ผเรยนสามารถก าหนดต าแหนงการเคลอนทแบบจดโดยใชมมได 4. ผเรยนสามารถก าหนดต าแหนงการเคลอนทแบบสวนโคงของวงกลมได 5. ผเรยนสามารถค านวณหาระยะทางในการเคลอนทได 6. มกจนสยการท างานอยางมระเบยบแบบแผน มความรบผดชอบตอตนเอง และสวนรวม มกจนสยชางทดตระหนกถงความปลอดภยและสงแวดลอม

84
หนวยการเรยนรท 4 พนฐานและหลกการเขยน เอน ซ โปรแกรม
4.1 พนฐานการเขยน เอน ซ โปรแกรม ในการเคลอนทไปยงจดใด ๆ ตองมต าแหนงของจดนน ๆ โดยต าแหนงดงกลาวสามารถ
ระบโดยใช( Cartesian coordinate system ) ซงมแกน X , Y และ Z บอกต าแหนงทงต าแหนงบวกและลบซงอางองจากจด Origin หรอ จด “ ศนย ” โดย จด Origin คอ ( X , Y , Z ) = ( 0 , 0 , 0 ) หรอ ต าแหนงท X ,Y และ Z ตางมคาเปน “ ศนย ” และเปนจดตดของทง 3 แกน โดยต าแหนงบวกและลบของแกนใด ๆ อยในทศตรงกนของแกนนน ๆ
รปท 4.1 ทศทาง ( + ) ของแนวแกน X Y Z รปท 4.2 ทศทาง ( - ) ของแนวแกน X Y Z
ดงนน การเคลอนทของทลของเครองจกรกล ซ เอน ซ จงมลกษณะเปนการเขยนรปภาพกราฟฟกทประกอบดวย เสนตรงและเสนโคงของวงกลม โดยมจดเรมตนและจดสนสดของแตละเสนอางองกบจดศนย ทก าหนดขนเองโดยผเขยนโปรแกรม สญลกษณมาตรฐานทใชบอกต าแหนงของจดศนยทเขยนก ากบ บนแบบของชนงานไดแสดงในรปท 4.3 สญลกษณนมชอวาจดศนยของชนงาน (Workpiece Zero Point) โดยทวไปแลวจดนใชเปนจดเดยวกบจดศนยของ เอน ซ โปรแกรม

85
รปท 4.3 สญลกษณจดศนยของชนงาน
4.2 การก าหนดต าแหนงการเคลอนท การก าหนดการเคลอนทไปยงต าแหนงตางๆสามารถก าหนดลกษณะการเคลอนทไดเปน 2 ประเภท คอ
4.2.1 การก าหนดต าแหนงการเคลอนทแบบสมบรณ การใหต าแหนงแบบสมบรณ หรอ แบบแอบโซลท ( Absolute Positioning ) คอ การเคลอนทจากจดหนงไปยงอกจดหนง โดยทจดทงสองยงใชจดอางองเดมหรอจดอางเดยวกน โดยปกตนน จดอางองจะเปนจด Origin หรอ ท X = 0 , Y = 0 และ Z = 0 หรอ ( X ,Y , Z ) = ( 0 , 0 , 0 )
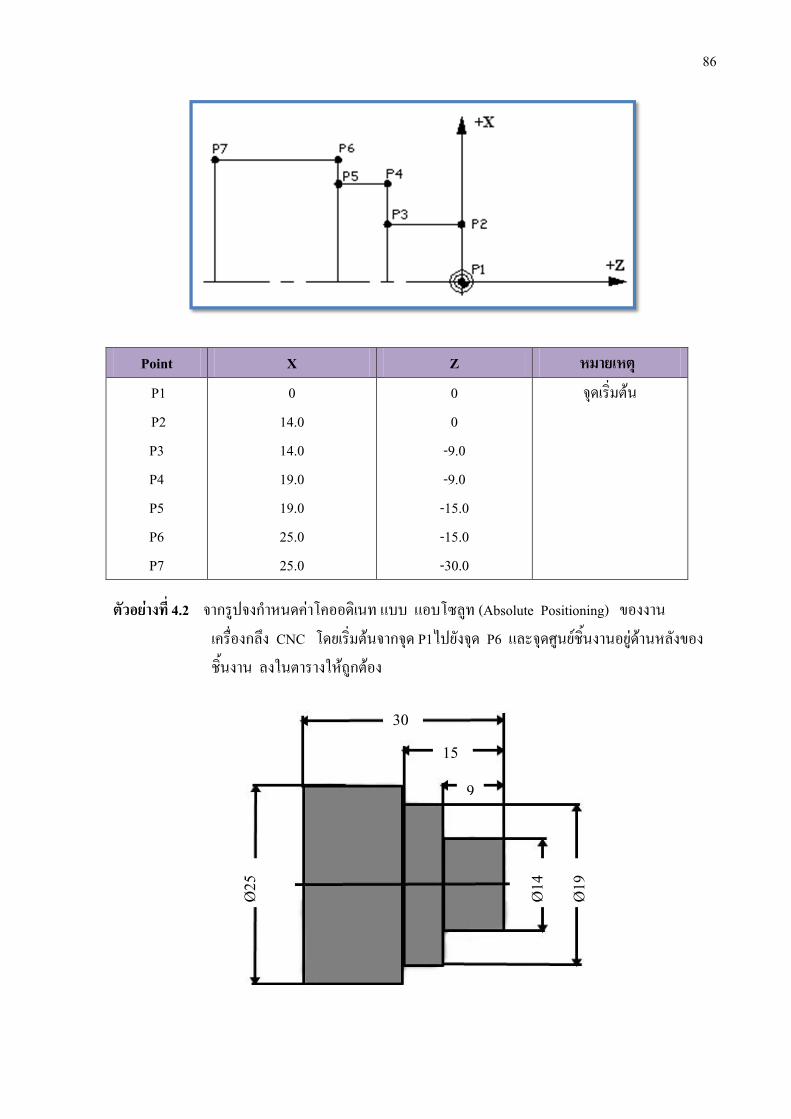
ตวอยางท 4.1 จากรปจงก าหนดคาโคออดเนท แบบ แอบโซลท (Absolute Positioning) ของงาน เครองกลง CNC โดยเรมตนจากจด P1ไปยงจด P6 และจดศนยชนงานอยดานหนาของ ชนงานลงในตารางใหถกตอง
หรอ
30 15
9
Ø14
Ø19
Ø25
86
Point X Z หมายเหต P1 P2
P3 P4 P5 P6 P7
0 14.0 14.0 19.0 19.0 25.0 25.0
0 0
-9.0 -9.0
-15.0 -15.0 -30.0
จดเรมตน
ตวอยางท 4.2 จากรปจงก าหนดคาโคออดเนท แบบ แอบโซลท (Absolute Positioning) ของงาน เครองกลง CNC โดยเรมตนจากจด P1ไปยงจด P6 และจดศนยชนงานอยดานหลงของ ชนงาน ลงในตารางใหถกตอง
30 15
9
Ø14
Ø19
Ø25

87
Point X Z หมายเหต P1 P2
P3 P4 P5 P6 P7
0 14.0 14.0 19.0 19.0 25.0 25.0
30.0 30.0 21.0 21.0 15.0 15.0 0.0
จดเรมตน
ตวอยางท 4.3 จากรปจงก าหนดคาโคออดเนท แบบ แอบโซลท (Absolute Positioning) ของงานเครองกด CNC โดยเรมตนจากจด P1ไปยงจด P4 ลงในตารางใหถกตอง
70
70

88
Point X Y (a) หมายเหต P1 P2
P3 P4 P5
0.0 0.0
70.0 70.0 0.0
0.0 70.0 70.0 0.0 0.0
จดเรมตน
ตวอยางท 4.4 จากรปจงก าหนดคาโคออดเนท แบบ แอบโซลท (Absolute Positioning) ของงานเครองกด CNC โดยเรมตนจากจด P1ไปยงจด P6 ลงในตารางใหถกตอง
80
40
40
90

89
Point X Y (b) หมายเหต P1 P2
P3 P4 P5 P6
0.0 -80.0 -80.0 -40.0 0.0 0.0
0.0 0.0
40.0 40.0 90.0 0.0
จดเรมตน
ตวอยางท 4.5 จากรปจงก าหนดคาโคออดเนท แบบ แอบโซลท (Absolute Positioning) ของงานเครองกด CNC โดยเรมตนจากจด P1ไปยงจด P9 ลงในตารางใหถกตอง
20 50
35
35
15

90
Point X Y Z หมายเหต P1 P2
P3 P4 P5 P6 P7 P8 P9
0 0
50.0 50.0 50.0
0 0
50.0 50.0
0 -20.0 -27.5 7.5 7.5 0
-20.0 -27.5 -27.5
0 0
20.0 20.0 -15.0 -15.0 -15.0 -15.0 20.0
จดเรมตน
4.2.2 การก าหนดต าแหนงการเคลอนทแบบสมพทธ การใหต าแหนงแบบสมพทธหรอแบบอนครเมนท ( Incremental Positioning ) คอ การเคลอนทจากจด หรอต าแหนงปจจบน ไปยงจดถดไป โดยอางองจากต าแหนงปจจบน หรอ เปนระยะหางระหวางสองจด โดยมเครองหมาย บวก ( + ) และเครองหมายลบ ( - ) ระบบอกทศทางการเคลอนทตามแนวแกนนน ๆ โดยอางองจากต าแหนงปจจบนหรอจดเรมตนของเสนนน ๆ ตวอยางท 4.6 จากรปจงก าหนดคาโคออดเนท แบบ สมพทธ (Incremental Positioning) ของงาน เครองกลง CNC โดยเรมตนจากจด P1ไปยงจด P6 และจดศนยชนงานอยดานหนาของ ชนงานลงในตารางใหถกตอง

91
Point X Z หมายเหต P1 P2
P3 P4 P5 P6 P7
0 14.0
0 5.0 0 6.0 0
0 0
-9.0 0
-6.0 0
-15.0
จดเรมตน
ตวอยางท 4.7 จากรปจงก าหนดคาโคออดเนท แบบสมพทธ (Incremental Positioning) ของงานเครอง กลง CNC โดยเรมตนจากจด P1ไปยงจด P6 และจดศนยชนงานอยดานหลงของชนงาน ลง ในตารางใหถกตอง
30 15
9
Ø14
Ø19
Ø25

92
Point X Z หมายเหต P1 P2
P3 P4 P5 P6 P7
0 14.0
0 5 0 6.0 0
30.0 0
-9.0 0
-6.0 0
-15.0
จดเรมตน
30 15
9
Ø14
Ø19
Ø25

93
ตวอยางท 4.8 จากรปจงก าหนดคาโคออดเนท แบบสมพทธ (Incremental Positioning) ของงานเครองกด CNC โดยเรมตนจากจด P1ไปยงจด P4 ลงในตารางใหถกตอง
Point X Y หมายเหต P1
P2 P3 P4 P5
0 0
70.0 0
-70.0
0 70.0
0 -70.0
0
จดเรมตน
70
70

94
ตวอยางท 4.9 จากรปจงก าหนดคาโคออดเนท แบบสมพทธ (Incremental Positioning) ของงาน เครองกด CNC โดยเรมตนจากจด P1 ไปยงจด P6 ลงในตารางใหถกตอง
Point X Y (c) หมายเหต P1
P2 P3 P4 P5 P6
0 -80.0
0 40.0 40.0
0
0 0
40.0 0
50.0 -90.0
จดเรมตน
80
40
40
90

95
ตวอยางท 4.10 จากรปจงก าหนดคาโคออดเนท แบบสมพทธ ( Incremental Positioning) ของงาน เครองกด CNC โดยเรมตนจากจด P1ไปยงจด P9 ลงในตารางใหถกตอง
Point X Y Z หมายเหต P1 P2
P3 P4 P5 P6 P7 P8 P9
0 0
50.0 0 0
-50.0 0
50.0 0
0 -20.0 -7.5 35.0
0 -7.5
-20.0 -7.5
0
0 0
20.0 0
-35.0 0 0 0
35.0
จดเรมตน
20 50
35
35
15

96
เปรยบเทยบขอดและขอเสยระหวางวธ การเคลอนทแบบสมบรณกบแบบสมพทธ เมอเปรยบเทยบขอไดเปรยบของการวธการใหต าแหนงเคลอนทแบบ Absolute และ แบบ
Increment สามารถสรปไดดงน ก. ขอไดเปรยบของการใหขนาดแบบ Absolute ไดแก
1. งายตอการก าหนดต าแหนง การตรวจสอบและแกไข เพราะไมมการค านวณหรออานคาไดโดยตรงจากแบบภาพวาดรายละเอยด
2. ความผดพลาดจากการเขยนโปรแกรมหรอจากการก าหนดจดใด ๆ ผด จะท าใหเกดการเบยงเบนเฉพาะจดทผดนน ๆ เทานน
3. ความคลาดเคลอนของขนาดนอย ความคลาดเคลอนนเปนผลเนองจากความคลาดเคลอน (tolerance) ของกลไกการเคลอนทของเครองจกร
ข. ขอไดเปรยบของการใหขนาดแบบ Increment ไดแก 1. สามารถน าไปใชใน Subroutine หรอ Macro ไดสะดวก 2. ไมตองแกไขทงโปรแกรม เมอมการเปลยนจดอางองไปยงต าแหนงอน
ค. ขอเสยของการใหขนาดแบบ Increment คอ 1. ความผดพลาดจากการเขยนโปรแกรมท าใหรปทรงและขนาดผดพลาดไป
หลายจด 2. ความคลาดเคลอนของขนาดมากกวา เพราะเกดจากการสะสมของความ
คลาดเคลอนของเครองจกร
4.3 การก าหนดต าแหนงของจดโดยใชมม ในการก าหนดขนาดของชนงานสวนมากนนสวนมากจะใชคาโคออรดเนต X , Y , Z แตบางชนงานจะมการก าหนดขนาดเปนมมองศามาให เชน รปทรง Taper และการท า Chamfer แตละคอนโทรลเลอรบางรนนนสามารถน าคามมทก าหนดตามแบบมาใชในค าสงของ NCโปรแกรมไดโดยตรงจงไมจ าเปนจะตองไปแปลงคามมองศาใหเปนโคออรดเนต X , Y , Z ซงจะใชเฉพาะรนของเครองจกรกล CNC นน ๆ โดยจะตองศกษาทคมอจากผผลตแตละบรษท ลกษณะทศทางของมมสามารถก าหนดไดดงน 4.3.1. มมเปนบวก ( + ) คอ มมในทศทางทวนเขมนาฬกา ( Counterclockwise หรอ CCW )

97
รปท 4.4 มมเปนบวก ( + ) 4.3.2. มมเปนลบ ( - ) คอ มมในทศทางตามเขมนาฬกา ( Clockwise หรอ CW )
รปท 4.5 มมเปนลบ ( - )
ตวอยาง 4.11 จากรปจงก าหนดคาโคออดเนท โดยก าหนดเปนมม แบบแอบโซลท ( Absolute Positioning ) ของงานเครองกลง CNC โดยเรมตนจากจด P1ไปยงจด P6 ลงในตารางใหถกตอง

98
Point X Z A หมายเหต P1 P2
P3 P4 P5 P6
0 12 18 18 25 25
0 0 -
-18.0 -
-30.0
- -
45 -
150 -
ตวอยาง 4.12 จากรปจงก าหนดคาโคออดเนทโดยก าหนดเปนมม แบบแอบโซลท (Absolute Positioning ) ของงานเครองกด CNC โดยเรมตนจากจด P1ไปยงจด P9 ลงในตารางใหถกตอง
24
50
90 30
20
30
50
80 14
60
1240
1080
1080

99
Point X Y A หมายเหต P1 P2
P3 P4 P5 P6 P7 P8 P9
P10 P11
0 0
20.0 70.0 90.0 90.0 70.0 60.0 30.0 20.0
0
0 50.0
- 80.0
- 0 0 -
30.0 - 0
- -
56 -
-56 - -
108 -
-108 -
4.4 คณตศาสตรส าหรบการโปรแกรม ในการค านวณเสนทางเดนใหแกเครองจกรกล ซ เอน ซ นอกเหนอจากต าแหนงบนแกน X , Y และ
Z ดงไดแสดงมาแลวกอนหวขอน บอยครงเราจะพบการก าหนดขนาดของชนงานดวยการใหเปนมม (หรอเปนองศา – รปท 4.6) ดวย แตเครองจกรกล ซ เอน ซ บางรนจบเฉพาะคา X , Y และ Z ดงนนเราจงตอง
แปลงมม ( ) และความยาวตามแนวแกน X และ Y หรออยในรปของโคออรดเนตท X = x และ Y = y
โดยคา x และ y จะค านวณไดจากคา และ d.

100
รปท 4.6 การก าหนดต าแหนงของจดสนสด E ดวยมม ( ) และความยาวของเสนตรง (d) หลกการค านวณหาคาความยาวของ x และ y ใชพนฐานของวชาตรโกณมต (Trigonometric)
โดยสามารถสรปไดเปน 4 กรณดงตอไปน 4.4.1. เสนตรงท ามมกบแนวระดบ
เมอเสนตรง SE ซงมความยาวเทากบ d เปนเสนทแยงท ามม เมอเปรยบเทยบแนวระดบ
หรอแนวนอน การค านวณหาคาความยาวของ x และ y ไดโดยพจารณาเปนรปสามเหลยมมมฉาก
SEA (รปท 4.4) โดยมเสน SA ( x ) ตงฉากกบเสน AE ( y )
ความยาวในแนวนอน x หรอเสนตรง SA (เปนเสนตรงหรอดานของรปสามเหลยมทสมผสกบมม ) มคาเทากบ d sin . โดยมม มหนวยเปนองศา
ความยาวในแนวตง x หรอเสนตรง AE (เปนเสนตรงหรอดานของรปสามเหลยมทอยตรงขามกบมม ) มคาเทากบ d cos .
รปท 4.7 การค านวณหาคาความยาวของ x และ y ของเสนตรงทท ามมกบแนวระดบ
การค านวณหาคาความยาวของ x และ y ของเสนตรงทท ามมกบมมกบแนวระดบสามารถสรปไดเปนรปแบบตาง ๆไดดงแสดงในรปท 4.8

101
รปท 4.8 ตวอยางการค านวณหาคาความยาวของ x และ y ของเสนทท ามมกบแนวระดบรปแบบตาง ๆ
ตวอยางท 4.13 จดเรมตน(S) อยท X = 1 และ Y = 1.2 ตองการหาคาของต าแหนงของจด E
เปนคาบนแกน X และ Y (หรอตองการหาความยาว x และ y ใหไดกอน)
จากรปทก าหนดเมอเทยบกบรป 4.8 ข จะเหนวา d มคาเทากบ 5 mm และ มคาเทากบ 30 องศา
ดงนน x = d COS = 5 COS o30 = 4.330 mm.

102
และ y = d sin = 5 sin o30 = 2.500 mm.
ต าแหนงของจด E ทตองการบนแกน X และแกน Y คอ 1 และ 1 ตามล าดบ ดงนนจากภาพบนจะได
1 = 1 + x = 1 + 4.330 = 5.330 mm.
และ 1 = 1.2 + y = 1.2 + 2.500 = 3.700 mm. ต าแหนงของจด S และจด E สามารถสรปไดดงน
จด X Y S E
1 5.330
1.2 3.700
4.4.2 เสนตรงท ามมกบแนวตง เมอเสนตรง SE ซงมความยาวเทากบ d เปนเสนทแยงท ามม เมอเทยบกบแนวตงหรอ
แนวดง การค านวณหาคาความยาวของ x และ y ไดโดยพจารณาเปนรปสามเหลยมมมฉาก SEA
(รปท 4.7) โดยมเสน AE ( x ) ตงฉากกบเสน SA ( y )
ความยาวในแนวนอน x หรอเสนตรง AE (เปนเสนตรงหรอดานของรปสามเหลยมทอยตรงขามกบมม ) มคาเทากบ d sin โดยมม มหนวยเปนองศา

103
ความยาวในแนวตง y หรอเสนตรง SA (เปนเสนตรงหรอดานของรปสามเหลยมทสมผสกบมม ) มคาเทากบ d cos
รปท 4.9 การค านวณหาคาความยาวของ x และ y ของเสนตรงทท ามมเทากบ กบแนวตง
รปท 4.10 ตวอยางการค านวณหาคาความยาวของ x และ y ของเสนตรงทท ามม กบแนวตง 4 รปแบบ

104
ตวอยางท 4.14 หา Coordinate ของจด B, D, F และ H (แบบ Absoiute)
วธหาจด B: จากเสน AB ม = o30 และ d = 4 mm. จากรปท 4.12 ก ได X = 4 – 4 sin o30 = 4 – 2 Y = 3 + 4 COS o30 = 3 + 3.464 ตอบ ต าแหนงของจด B คอ (X, Y) = (2, 6.464) mm. วธหาจด D: จากเสน CD ม = o45 และ d = 3 mm. จากรปท 4.12 ข ได X = 3 – 3 sin o45 = -3 + 2.121 Y = 2 + 3 COS o45 = 2 + 2.121 ตอบ ต าแหนงของจด D คอ (X, Y) = (-0.879, 4.121) mm. วธหาจด F: จากเสน EF ม = o60 และ d = 5 mm. จากรปท 4.12 ง ได X = - 1.5 + 5 sin o60 = -1.5 + 4.33 Y = 2 + 3 COS o45 = -1 – 2.50 ตอบ ต าแหนงของจด F คอ (X, Y) = (2.830, -3.500) mm. วธหาจด H: จากเสน GH ม = o20 และ d = 2.5 mm. จากรปท 4.12 ค ได X = - 5 – 2.5 sin o20 = 5 – 0.855 Y = -2 + 2.5 COS o20 = -2 – 2.349 ตอบ ต าแหนงของจด H คอ (X, Y) = (4.145, 0.349) mm.
4.4.3 ความสมพนธระหวางมมแนวนอนและแนวตง เสนตรง SE เปนเสนในแนวทแยงทท ามมกบ เทยบกบแกนในแนวนอน และมมมเทากบ เทยบกบแกนในแนวตง เมอทราบมมใดมมหนง มมทเหลอสามารถค านวณไดจาก

105
+ = 90 (เนองจากแกนตงและแกนนอนท ามม 90 ซงกนและกน) หรอ = 90 - หรอ = 90 -
รปท 4.11 ความสมพนธระหวางมมแนวนอนและแนวตง ตวอยาง 4.15 หา Coordinate ของจด E
วธท 1 หาความยาว x และ y โดยเปรยบเทยบจากรปท 4.12 ก จะได = o60 และ d = 8 mm.
1 = -4 + 8 sin o60 = -4 + 6.928 1 = - 1 + 8 cos o60 = - 1 + 4 ตอบ ต าแหนงของจด E คอจะได ( 1 , 1 ) = (2.794, 3) mm
4.4.4 ค าสงตรโกณมตอน ๆ นอกเหนอจากค าสง Sin และ COS ทใชในการค านวณหาต าแหนงแลว ในหลายกรณค าสง tan อาจจะน ามาใชเสรมในการค านวณได จากรปสามเหลยมมมฉาก ABC ในรปท 4.10 ก และ ข จะได

106
รปท 4.12 ความสมพนธระหวางมม และความยาว h และ d ไดจากคา tan
เมอเปรยบเทยบกบหวขอ 4.5.1 และ 4.5.2 จะเหนวาความยาว h คอความยาวเดยวกนกบ
y ความยาว L คอความยาวเดยวกบ x , คอมมทอางองกบแนวนอน และ คอมมทอางองกบแกนแนวตง ตวอยางท 4.16 ทราบมมทจดเรมตน S เทากบ o35 และต าแหนงของจด S ท x = 1 mm, y = 0.5 mm. ท จดสนสด E มต าแหนงท y = 5 mm. จงหาต าแหนงของจด E บนแกน X
จากรปภาพ จะได h = 5 – 0.5 = 4.5 mm., และ = o35
เนองจาก tan = l
h
ดงนน l = tan
h = o35tan
5.4
= 6.427 mm. คา X ของจด E 8nv 1 + l = 1 + 6.427 = 7.427 mm. ตอบ ต าแหนงของจด E บนแกน X คอ 7.427 mm.

107
4.5 การก าหนดต าแหนงของการเคลอนทแบบสวนโคงของวงกลม ในการก าหนดการเคลอนทแบบสวนโคงของวงกลม ( อารค - Arc ) ตามหลกการของ NC โปรแกรม ม 3 วธ โดยแตละวธจะตองก าหนด จดสนสดของสวนโคงของวงกลม และจดศนยกลางของวงกลมโดยเทยบต าแหนงของจดศนยกลางจากจดเรมตนของสวนโคงทง 3 วธ สรปไดดงน
4.5.1 แบบ I J K แบบ I J K ใชโคออรดเนต I , J และ K ส าหรบต าแหนงของจดศนยกลางของวงกลม
( หรอสวนโคง ) โดยมระยะอางองกบจดเรมตนแบบ Increment วธ I J K นใชไดทงการโปรแกรมแบบ Absolute และ Increment โคออรดเนต I เปนระยะจากจดเรมตนไปยงจดศนยกลางในแกนขนานกบแกน X โคออรดเนต J เปนระยะจากจดเรมตนไปยงจดศนยกลางในแกนขนานกบแกน Y โคออรดเนต K เปนระยะจากจดเรมตนไปยงจดศนยกลางในแกนขนานกบแกน Z
รปท 4.13 ทศทางบวกของแกน I, J และ K เมอมจดศนยเดยวกบจดศนยของโคออรดเนต XYZ
รปท 4.14 ทศทางบวกของแกน I , J และ K ( ขนานกบแกน X , Y , Z ) ทจดเรมตน S

108
ตวอยางท 17 เขยนสวนโคงของวงกลมโดยก าหนดต าแหนงแบบ Absolute
ก. เรมจากจด S ไปสนสดทจด E มโคออรดเนต I J ดงแสดงในรป ก
จด X Y I J หมายเหต S -3.0 0.0 จดเรมตน
เคลอนทจาก S ไป E เปนการเคลอนทในทศทางตามเขมนาฬกา ( CW ) เมอเทยบกบจดศนย กลาง C
E 0.0 3.0 3.0 0.0
ข. เรมจากจด E ไปสนสดทจด S มโคออรดเนต I J ดงแสดงในรป ข
จด X Y I J หมายเหต E 0.0 3.0 จดเรมตน
เคลอนทจาก E ไป S เปนการเคลอนทในทศทางทวนเขมนาฬกา ( CCW ) เมอเทยบกบจดศนย กลาง C
S -3.0 0.0 0.0 -3.0
ตวอยางท 18 เขยนสวนโคงของวงกลมโดยก าหนดต าแหนงแบบ Absolute

109
ก. เรมจากจด A ไปสนสดทจด B มโคออรดเนต I J ดงแสดงในรป
จด X Y I J หมายเหต A 0.0 20.0 จดเรมตน
เคลอนทจาก A ไป B เปนการเคลอนทในทศทางทวนเขมนาฬกา ( CW ) เมอเทยบกบจดศนยกลาง C
B 20.0 0.0 0.0 -20.0
ข. เรมจากจด B ไปสนสดทจด A มโคออรดเนต I J ดงแสดงในรป
จด X Y I J หมายเหต A 20.0 0.0 จดเรมตน
เคลอนทจาก B ไป A เปนการเคลอนทในทศทางตามเขมนาฬกา ( CCW ) เมอเทยบกบจดศนย กลาง C
B 0.0 20.0 -20.0 0.0
ตวอยางท 19 เขยนสวนโคงของวงกลมโดยก าหนดต าแหนงแบบ Absolute โดยการเคลอนททวนเขม นาฬกา จากจด A , B , C ………. ตามล าดบ
จดศนยกลาง
จดศนยกลาง

110
จด X Y I J หมายเหต A 30.0 0.0
จดเรมตนของอารค AB B 0.0 30.0 -30.0 0.0 C 0.0 25.0 จดเรมตนของอารค CD
D -25.0 0.0 0.0 -25.0 E -20.0 0.0
จดเรมตนของอารค EF F 0.0 -20.0 -20.0 0.0 G 0.0 -15.0
จดเรมตนของอารค EF H 15.0 0.0 0.0 25.0 A 30.0 0.0
ตวอยางท 20 ก. เรมจากจด A และ B , C และ D ( ทวนเขมนาฬกา ) แบบ Absolute
จด X Y I J หมายเหต A 10.0 2.0
จดเรมตนของอารค AB B 16.0 8.0 0.0 8.0-2.0 = 6.0 C 18.0 8.0
จดเรมตนของอารค CD D 10.0 16.0 10.0-18.0 = -8.0 -25.0
ข. เรมจากจด D ไป C , B และ A ( ตามเขมนาฬกา ) แบบ Absolute
จด X Y I J หมายเหต D 10.0 16.0
จดเรมตนของอารค DC C 18.0 8.0 0.0 8.0-16.0 = 6.0 B 16.0 8.0
จดเรมตนของอารค BA A 10.0 2.0 10.0–16.0 = -6.0 -25.0

111
หมายเหต ก. คา I , J และ K ของตวอยางนค านวณจาก I = จดสนสดบนแกน X - จดเรมตนหรอต าแหนงปจจบนบนแกน X J = จดสนสดบนแกน Y - จดเรมตนหรอต าแหนงปจจบนบนแกน Y K = จดสนสดบนแกน Z - จดเรมตนหรอต าแหนงปจจบนบนแกน Z ข. จากตวอยาง ท 1 , 2 และ 3 จะเหนไดวาต าแหนงของจดสนสดไมเปลยนคา ไมวาจะมทศทางตามหรอทวนเขมนาฬกา แตต าแหนงของจดศนยกลางจะเปลยนไปจากเดม ตวอยางท 21 ก. เรมจากจด A และ B , C และ A แบบ Absolute
จด X Y I J หมายเหต A 12.0 0.0 จดเรมตน B 12.0 5.0 C 9.0 8.0 9.0– 2.0 = -3.0 0.0 ทวนเขมนาฬกา D -4.0 8.0 E -5.0 7.0 0.0 7 – 8 = -1.0 ทวนเขมนาฬกา F -5.0 -4.0 G -1.0 -8.0 -1.0 - (-5.0 ) = 4.0 0.0 ทวนเขมนาฬกา H 10.0 -8.0 I 12.0 -6.0 0.0 -6.0 – (-8.0 ) = 2.0 ทวนเขมนาฬกา A 12.0 0.0

112
ตวอยางท 22 ก. เรมจากจด A และ B , C และ A แบบ Increment
จด X Y I J หมายเหต A 12.0 0.0 จดเรมตน B 0.0 5.0 C -3.0 3.0 -3.0 0.0 ทวนเขมนาฬกา D 0.0 -13.0 E -1.0 -1.0 0.0 -1.0 ทวนเขมนาฬกา F 0.0 -11.0 G 4.0 -4.0 4.0 0.0 ทวนเขมนาฬกา H 11.0 0.0 I 2.0 2.0 0.0 2.0 ทวนเขมนาฬกา A 0.0 6.0
หมายเหต คา I , J จะมคาเทากนไมวาจะเปนการโปรแกรมแบบ Absolute และ Increment 4.5.2 แบบ P Q แบบโคออรดเนต P และ Q จะใชเฉพาะกบเครองกลงเทานน และเฉพาะคอนโทรลเลอร
บางรนเทานนโดยม โคออรดเนต P เปนระยะจากจด Origin ไปยงจดศนยกลางในแกน X
โคออรดเนต Q เปนระยะจากจด Origin ไปยงจดศนยกลางในแกน Z ดงนน โคออรดเนต P และ Q เปนต าแหนงของจดศนยกลาง เมอเทยบกบจด Origin ( จดศนย ) หรอเปนแบบ absolute ( แบบ I J K เปนแบบ increment ) โดยโคออรดเนต P ขนานกบแกน X และ โคออรดเนต Q ขนานกบแกน Z ทศทางบวกของ P และ Q มทศทางเดยวกบ โคออรดเนต X และ Z

113
รปท 4.15 โคออรดเนต P และ Q โดยมระยะของ P และ Q ไปยงจดสดทาย E เทยบกบจด Origin เสมอ
ตวอยางท 23 เดนจากจด A ไปยง E เปนแบบ Absolute โดยใชแบบ PQ
จด X Z P Q หมายเหต A 0.0 40.0 จดเรมตน B 10.0 30.0 0.0 30.0 ทวนเขมนาฬกา C 14.0 26.0 14.0 30.0 ทวนเขมนาฬกา D 22.0 18.0 14.0 18.0 ทวนเขมนาฬกา E 22.0 0.0

114
ตวอยางท 24 เดนจากจด A ไปยง E โดยใชแบบ PQ
ก. จากจด A ไป E แบบ Absolute
จด X Y P Q หมายเหต A 0.0 0.0 จดเรมตน B 5.0 -5.0 0.0 -5.0 ทวนเขมนาฬกา C 5.0 -10.0 D 11.928 -14.0 5.0 -18.0 ทวนเขมนาฬกา E 11.928 -24.0 0.0 -1.0
ข. จากจด A ไป E แบบ Increment
จด X Y P Q หมายเหต A 0.0 0.0 จดเรมตน B 5.0 -5.0 0.0 -5.0 ทวนเขมนาฬกา C 0.0 -5.0 D 6.928 -4.0 5.0 -18.0 ทวนเขมนาฬกา E 0.0 -10.0
4.5.3 แบบ R การก าหนดเสนทางเดนตามสวนโคงของวงกลมโดยใชรศม ( R ) หรอแบบ R โปรแกรม
ในคอลโทรลเลอรจะท าการค านวณหาจดศนยกลางใหโดยอตโนมต โดยปอนคาต าแหนงของจดสนสด และคา R ( แทนทจะตองปอนคา X , Z หรอ I , K หรอ P , Q ) ในกรณนจะใชเฉพาะคอลโทรลเลอรบางรนเทานน

115
ตวอยางท 25 เรมตนเดนจากจด A ในทศทางทวนเขมนาฬกา แบบ Absolute
จด X Z R หมายเหต A 12.0 40.0 จดเรมตน B 12.0 5.0 C 9.0 8.0 3.0 ทวนเขมนาฬกา D -4.0 8.0 E -5.0 7.0 1.0 ทวนเขมนาฬกา F -5.0 -4.0 G -1.0 -8.0 4.0 ทวนเขมนาฬกา H 10.0 -8.0 I 12.0 -6.0 2.0 ทวนเขมนาฬกา A 12.0 0.0
ตวอยางท 26 เรมตนเดนจากจด A ไป E แบบ Absolute โดยใชแบบ R

116
จด X Y R หมายเหต A 0.0 40.0 จดเรมตน B 10.0 30.0 10 ทวนเขมนาฬกา C 14.0 26.0 4.0 ตามเขมนาฬกา D 22.0 18.0 8.0 ทวนเขมนาฬกา E 22.0 0.0
ตวอยางท 27 เรมตนเดนจากจด A ไป E แบบ Absolute โดยใชแบบ R
จด X Y R หมายเหต A 0.0 0.0 จดเรมตน B 5.0 -5.0 5.0 ทวนเขมนาฬกา C 0.0 -10.0 D 11.928 -14.0 8.0 ทวนเขมนาฬกา E 11.928 -24.0

117
สรปหนวยการเรยนรท 4
เครองจกร CNC เปนเครองจกรทมการน าระบบคอมพวเตอรเขามาชวยในการสงงานและประมวลผลเพอสงใหเครองจกรท างานตามความตองการของผใชงาน โดยมการท างานเปนแบบอตโนมต ซงเปนผลใหผปฏบตงานสามารถใชเครองจกร CNC ท าการปฏบตงานแตกตางจากเครองจกรกลในการผลต ขนพนฐานทว ๆ ไป ในการเขยนค าสงเพอสงใหเครองท างานไดนน จ าเปนตองมความรพนฐานและหลกการเขยนเอน ซ โปรแกรม ซงเปนการก าหนดต าแหนงการเคลอนท การก าหนดต าแหนงจด การก าหนดต าแหนงการเคลอนทแบบสวนโคง และคณตศาสตรส าหรบการโปรแกรม

118
แบบทดสอบกอนเรยน - หลงเรยน หนวยการเรยนรท 4 พนฐานและหลกการเขยน เอน ซ โปรแกรม
เลอกค าตอบทถกทสดเพยงขอเดยว 1. ในการเคลอนทไปยงต าแหนงตาง ๆ นนสามารถก าหนดลกษณะการเคลอนทไดเปนกประเภท .
ก. 2 ประเภท ข. 3 ประเภท
ค. 4 ประเภท ง. 5 ประเภท
จากรปดงกลาวจงบอกคาโคออรดเนตตาง ๆ แบบ Absolute Positioning . จากขอ 2 - 6
2. จด P1 มคาโคออรดเนตเทาไร ก. X = 6.5 Z = 0.5 ข. X = 13 Z = 0.5 ค. X = 6.5 Z = 0 ง. X = 13 Z = 0

119
3. จด P2 มคาโคออรดเนตเทาไร ก. X = 7.5 Z = 0
ข. X = 15 Z = 0 ค. X = 7.5 Z = 0.5 ง. X = 15 Z = -1
4. จด P3 มคาโคออรดเนตเทาไร
ก. X = 7.5 Z = 28 ข. X = 7.5 Z = 28 ค. X = 15 Z = -28 ง. X = 7.5 Z = -28
5. จด P4 มคาโคออรดเนตเทาไร
ก. X = 15 Z = 84 ข. X = 30 Z = - 84
ค. X = 15 Z = -84 ง. X = 30 Z = 84
6. จด P5 มคาโคออรดเนตเทาไร
ก. X = 30 Z = - 113 ข. X = 15 Z = - 113 ค. X = 30 Z = 113 ง. X = 15 Z = 113
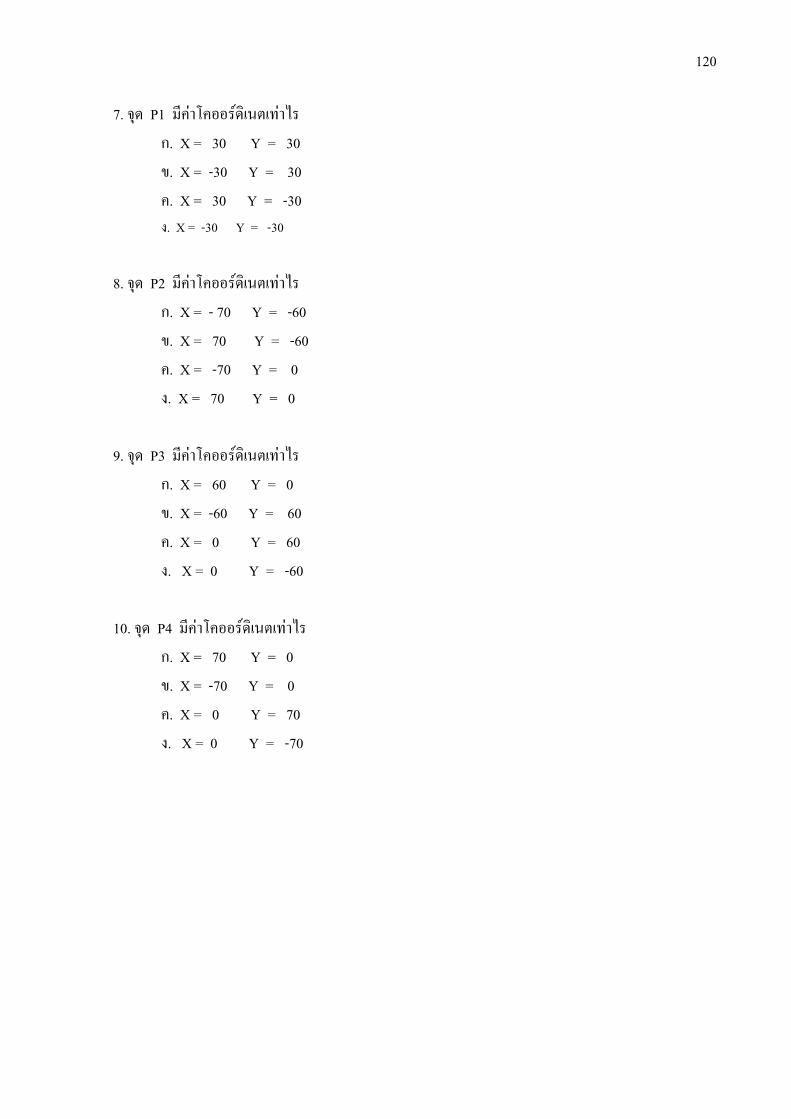
จากรปดงกลาวจงบอกคาโคออรดเนตตาง ๆ แบบ Incremental Positioning จากขอ 7 – 10
120
7. จด P1 มคาโคออรดเนตเทาไร ก. X = 30 Y = 30 ข. X = -30 Y = 30 ค. X = 30 Y = -30 ง. X = -30 Y = -30
8. จด P2 มคาโคออรดเนตเทาไร
ก. X = - 70 Y = -60 ข. X = 70 Y = -60 ค. X = -70 Y = 0 ง. X = 70 Y = 0
9. จด P3 มคาโคออรดเนตเทาไร
ก. X = 60 Y = 0 ข. X = -60 Y = 60 ค. X = 0 Y = 60 ง. X = 0 Y = -60
10. จด P4 มคาโคออรดเนตเทาไร
ก. X = 70 Y = 0 ข. X = -70 Y = 0 ค. X = 0 Y = 70 ง. X = 0 Y = -70

121
เฉลยแบบทดสอบกอนเรยน - หลงเรยน หนวยการเรยนรท 4 พนฐานและหลกการเขยน เอน ซ โปรแกรม
ขอท ค าตอบ 1. ก. 2. ง. 3. ง. 4. ค. 5. ข. 6. ก. 7. ง. 8. ง. 9. ค.
10. ข.





























