Embed Size (px)
Citation preview

A. COLLECTION OF TECHNICAL PAPERS
Part 1
A98-37001
AIAA Guidance, Navigation, and Control
Conference and Exhibit
August 10-12, 1998/Boston, Massachusetts
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 1 of 22

Copyright© 1998 by American Institute of Aeronautics and Astronautics
ISBN 1-56347-269-4
All rights reserved. No part of this volume may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, for any purpose without permission from the publisher.
Printed in the U.S.A.
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 2 of 22

AIAA Guidance, Navigation, and Control Conference and Exhibit
Boston, MA I August 1~12, 1998 TABLE OF CONTENTS
Paper No. Title and Author "Page Number
Session 1-GNC-1 Advanced ATM Concepts
98-4101 Agent-Based Performance Assessment Tool for General Aviation Operations Under Free Flight ' K. Harper, S. Mulgund, G. Zacharias, and J. Kuchar ...........................................................................
98-4102 ·Modeling and Identification of an Airline Operations Center as a Multi-Agent Queuing System N. Pujet, E. Feron, and A. Rakhit. ....................................................................................................... 11
98-4103 Evaluation of a Cooperative Air Traffic Management Model Using Principled Negotiation BelY(een Intelligent Agents ,L. Jacolin and R. Stengel ................................................................................................................... 20
98-4104 Solution Complexity Metrics W. ,Niedringhaus ................................................................................................................................. 30
98-4105 Real-Time Decision Support for Air Traffic Management, Utilizing Concept Learning J. Nogami, S. Nakasuka, and K. Hori. ................................................................................................ 52
98-4106 Comparison of Algorithms for the Dynamic Resectorization of Airspace W. Pawlak, V. Goel, D. Rothenberg, and C. Brinton .......................................................................... 67
Session 2-GNC-2 Reconfigurable Flight Control
98;4101 Reconfigurable Flight Control for a Tailless Advanced Fighter Aircraft J. Brinker and K. Wise ........................................................................................................................ 75
98-4108 Direct Adaptive Reconfigurable Control of a Tailless Fighter Aircraft ,, A, Calise, S. Lee, and M. Sharma ..... : ...... t ••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••••• 88
, 98-4109 Control Allocation Approaches D. Enns ............................................................................................................................................... 98
98-4110 Parameter Identification for Systems with Redundant Actuators M. Elgersma, D. Enns, S. Shald, and P. Voulgaris ........................................................................... 109
98-4111 Stability Analysis of Reconfigurable and Gain Scheduled Flight Control Systems Using LMls ·K. Wise and J. Sedwick .................................................................................................................... 118
98-4112 Reconfigurable Flight Control on Sliding Modes Addresing Actuator Deflection and Deflection Rate Saturation Y. Shtessel, J. Buffington, M. Patcher, P. Chandler, and S. Banda .................................................. 12
Session 3-GNC-3 Missile Guidance I
98-4113 Angle of Attack Guidance via Robust Approximate Inversion M. Innocenti, G. Carnasciali, and F. Nasuti. ..................................................................................... 138
98-4114 A New Missile Guidance Algorithm Against a Maneuvering Target F. lmado, T. Kuroda, and M.-J. Tahk ................................................................................................. 14
98-4115 Guidance-Law Synthesis for Interception and Rendezvous C.-C. Yang, C.-D. Yang, and H.-Y. Chen .................•........................................................................ 154
98-4116 Optimal Guidance of Modified Proportional Navigation F.-K. Hsu and P.-J. Yuan .................................................................................................................... NA
98-4117 A Composite Guidance Strategy for Three-Dimensional Air-to-Surface Missiles 0.-R. Taur and J.-S. Chern ......................................................................................... ................... 16
98-4118 An Iterative Numerical Method for a Class of Quantitative Pursuit-Evasion Games M.-J. Tahk, H. Ryu, and J.-G. Kim ........................ , ........................................................................... 175
WCF-Withdrawn XI
NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 3 of 22

Session 4-GNC-4 Guidance and Control of Aerospace Vehicles
98-4119 Reusable Launch Vehicle Guidance and Control Using Subspace Stabilization Control Techniques C. Tournes and C. Johnson .............................................................................................................. 183
98-4120 Re-entry and Terminal Guidance for Vertical-Landing TSTO (Two-Stage-to-Orbit) Y. lshijima, S. Matsumoto, and K. Hayashi. ...................................................................................... 192
98-4121 Robust Nonlinear Model Predictive Control for Agile Interceptor Missiles R. Mehra, M. Gopinathan, and P. Sistu ............................................................................................ 201
98-4122 Minim~m-fuel Trajectory along Entire Flight Profile for a Hypersonic Vehicle with Constraint H. Morimoto and J. Chuang ............................................................................................................. 21,2
98-4123 Aircraft Guidance and Control Using Subspace Stabilization Control Techniques C. Tournes and C. Johnson .............................................................................................................. 225
98-4124 Formation Flight as a Cooperative Game M. Anderson and A. Robbins ........................................................................................................... ~'/;#
. Session 5-GNC-5 Space Robotics
98-4125 3-D Guidance and Navigation of Mobile and Flying Robot Using Fuzzy Logic J. Sasiadek and Q. Want ................................................................................................................ ~ ~5"°
98-4126 Experiments on Space Robot Path Planning Using the Sensors Database, Part II T. Iwata, S. Ueno, and H. Murakami ................................................................................................ 252
98-4127 Planning Paths Through Singularities in the Center of Mass Space W. Doggett, W. Messner, and J.-N. Juang ....................................................................................... 261
98-4128 Attitude Control of a Space Robot Using the Nonholonomic Structure K. Matsuda, Y. Kanemitsu, and S. Kijimoto ...................................................................................... 27
~9~4129 ~a~~~~~r~:~r ~~e~~l:;,d a~~~~~i~I~ ~i-~.~~'..~.~~~~~~~- ~~~~~---~--~~~~~~~~'.~~-~~~~-~~\l·~tt"::;98-4130 Dynamics of Tethered Multi body Systems with Friction and Impact -
S. Matunaga, 0. Mori, and Y. Ohkami ............ ~ ................................................................................ ~7-~
Session 6-GNC-6 Robust Control
98-4131 Robust Command Augmentation System Design Using Genetic Search Methods G. Sweriduk, P. Menon, and M. Steinberg ....................................................................................... _ 2.. f.~
98-4132 Robust Flight Controller Design Using H00 Loop-Shaping and Dynamic Inversion Techniques Z. Smit and I. Craig ..................................................................... , .................................................... 305
98-4133 Design of Flight Control Laws for a Civil Aircraft Using µ-Synthesis S. Bennani and G. Looye ................................................................................................................. 314
98-4134 A "Modern" Look at Gain and Phase Margins: An HcxJµ Approach G. Deodhare and V. Patel ................................................................................................................. 325
98-4135 Parameterization of Model Validating Sets for Uncertainty Bound Optimizations K. Lim and D. Giesy ......................................................................................................................... 33
98-4136 Practical Upper and Lower Bounds for Robust !lf2 Performance Under LTI Perturbations J. Tierno and S. Glavaski ................................................................................................................. 347
Session 7-GNC-7 Optimal and Adaptive Control of Flexible Structures
98-4137 An Analysis of the Expected Residual Vibration of Input Shaping Designs L. Pao and M. Lau ............................................................................................................................ 354
98-4138 Robust Control Design for a Flexible Manipulator Using Hoofµ Synthesis K. Abdel-Motagaly and T. Alberts ...................................................................................................... 365
98-4139 Electrostatic Control of a Membrane Using Adaptive Feedback Linearization D. Scharf, D. Hyland, and P. Washabaugh ...................................................................................... 37
98-4140 Output Feedback Variable Structure Adaptive Control of a Flexible Spacecraft Y. Zeng, A. Arujo, and S. Singh ........................................................................................................ 383
WO-Withdrawn XII
NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 4 of 22
98-4141 Optimal Control Procedure for Large Space Structures by Using Functional Analysis S. Suda and H. Fujii ......................................................................................................................... 394
98-4142 Robust Optimal Controllers for Active Flutter Suppression A. Tewari .......................................................................................................................................... _39g.
Session 17-GNC-8 Artificial Intelligence Applications Cambridge
98-4197 A Coevolutionary Minimax Solver and Its Application to Autopilot Design C.-S. Park and M.-J. Tahk ................................................................................................................ 408
98-4198 Integrated Fuzzy/H00 Control for Turbofan Engines C.-F. Lin and J. Ge ........................................................................................................................... 416
98-4199 Reduction of Sensors for Forebody VFC Using Fuzzy Logic Based Control J. Suzuki and J. Valasek ................................................................................................................... 421
98~4200 Synthesis of Adaptive Fuzzy Logic Controllers with Control Rate and Amplitude Limits J. Prasad and T.-Y. Jiang .................................................................................................................. 429
98-4201 An Improved Neural-Network Flight Mode Interpreter D. Smith, D. Ward, and T. Nguyen ................................................................................................... 438
98-4202 A Multi-Agent Control System Framework for Smart Structures V. Sahasrabudhe and A. Mehra ........................................................................................................ 449
98-4203 Airborne Joint Intentions Network D. Rock and P. Erway ....................................................................................................................... 460
Session 18-GNC-9 Nonlinear Flight Control
98-4204 Nonlinear Control Using Forebody Tangential Blowing Y. Takahara and S. Rock .................................................................................................................. 471
98-4205 High Angle of Attack Control Law Design and Analysis Using Non-linear Bifurcation Methods D. Littleboy and Y. Patel ................................................................................................................... 482'
98-4206 A Feedback Linearisation Based Nonlinear Controller Synthesis to Recover an Unstable Aircraft from Poststall Regime A. Saraf, G. Deodhare, and D. Ghose ............................................................................................. 493
98-4207 Precision Approach with Curved Flight Path and Accurate Time of Arrival A. Naghash and D. Enns .................................................................................................................. 503
98-4208 Robust Nonlinear Dynamic Inversion Method for an Aircraft Motion Control M. Goman and E. Kolesnikov ........................................................................................................... 511
98-4209 Output Feedback Variable Structure Adaptive Control of an Aeroelastic System Y. Zeng and S. Singh ........................................................................................................................ 522
98-4210 Nonlinear Integrated Steering and Control of Flight Vehicles D. Li and E. Poh ............................................................................................................................... 533
98-4211 Energy Approach to Flight Control A. Kurdjukov, G. Natchinkina, and A. Shevtchenko .......................................................................... 543
S~ssion 19-GNC-10 Missile Guidance II Charles River
98-4212 Nonlinear H00 Robust Guidance Law for Homing Missiles H.-Y. Chen and C.-D. Yang ............................................................................................................... 554
98-4213 Optimal Mid-Course Guidance of Variable Flow Ducted Rocket Missiles T. Kuroda, S. Mihara, H. Matsuda, R. Hirokawa, and F. Imada ....................................................... 563
98-4214 An Approximate Target Adaptive Guidance for IR Homing P. Kim, B.-E. Jun, and H. Cho .......................................................................................................... WD
98-4215 Simple Guidance Law Against Highly Maneuvering Targets P. Gurfil, M. Jodorkovsky, and M. Guel man ..................................................................................... 570
98-4216 Three-Dimensional Zero-Lag LOS Guidance of BR/CLOS Missiies D.-R. Taur and J.-S. Chern ............................................................................................................... 581
WO-Withdrawn XIII
NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 5 of 22

98-4217 Gaussian Second-Order Filter for Proportional Navigation of Exoatmospheric Interceptors with Angles-Only Measurements H. Hablani ......................................................................................................................................... 592
Session 20-GNC-11 Optimization Techniques and Applications
98-4218 Linear Time-Varying Dynamic Systems Optimization via Higher-Order Method Using Shifted Chebyshev's Polynomials X. Xu and S. Agrawal ....................................................................................................................... 607
98-4219 An Integrated Dynamics Approach for Optimal Control R. Hull and J. Cloutier ...................................................................................................................... 614
98-4220 Optimization of Supersonic Transport Trajectories M. Ardema, and R. Windhorst .......................................................................................................... 622
98-4221 Application of Neural Networks to Transport Performance Optimization C.-F. Lin, J. Ge, T. Yu, and G. Gilyard .............................................................................................. 63
98-4222 Costate Estimation by a Legendre Pseudospectral Method F. Fahroo and I. Ross ....................................................................................................................... 643
98-4223 Fast and Accurate Integration of Launcher Trajectory Applied to Trajectory Optimization P. Augros and L. Perrot. .................................................................................................................... 654
Session 21-GNC-12 Spacecraft GN & CI
98-4224 Cassini Maneuver Experience: Launch and Early Cruise T. Goodson, D. <;3ray, Y. Hahn, and F. Peralta .................................................................................. 665
98-4225 A Hierarchical Coordination Scheme for Satellite Formation Initialization R. Beard, W. Stirling, and R. Frost ................................................................................................... 677
98-4226 Optimal Formation-Reconfiguration for Multiple Spacecraft P. Wang and F. Hadaegh .................................................................................................................. 686
98-4227 A New Magnetometer Calibration Algorithm and Applications M. Challa and R. Harman ................................................................................................................. 697
98-4228 A Novel Sensor for Attitude Determination Using Global Positioning System Signals J. Crassidis, D. Quinn, F. Markley, and J. McCullough .................................................................... 708
98-4229 Dynamic Feedback Linearizing Attitude Control of Spacecraft with Uncertain Dynamics Y. Zeng and S. Singh ........................................................................................................................ 718
Session 22-GNC-13 Adaptive and Fault Tolerant Control
98-4230 Nonlinear Adaptive Flight Control with a Backstepping Design Approach M. Steinberg and A. Page ................................................................................................................ 728
98-4231 Stable Adaptive Fault-Tolerant Control of Overactuated Aircraft Using Multiple Models, Switching and Tuning J. Boskovic, S.-H. Yu, and R. Mehra ................................................................................................ 739
98-4232 Robust Variable Structure Controller Design for Fault Tolerant Flight Control D. Kim and Y. Kim ............................................................................................................................. 750
98-4233 H00 State Feedback Control for Continuous-Time Active Fault Tolerant Control Systems J. Ge and C.-F. Lin ........................................................................................................................... 760
98-4234 Automatic Closed-Loop Identification and Robust Control Synthesis X. Feng, C.-F. Lin, T.-J. Yu, and M. Whorton .................................................................................... 765
98-4235 Constrained Model Predictive Control of a Nonlinear Aerospace System C. Shearer and S. Heise .................................................................................................................. 772
Session 23-GNC-14 Collision Avoidance for ATM
98-4236 The GEARS Conflict Resolution Algorithm R. Irvine ............................................................................................................................................ 786
98-4237 Using Intent Information in Probabilistic Conflict Analysis L. Yang and J. Kuchar ...................................................................................................................... 797
WO-Withdrawn XIV
NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 6 of 22
98-4238 A Methodology for the Performance Evaluation of a Conflict Probe Tool K. Bilimoria ......................................................................................................................................... NA
98-4239 Conceptual Design of Free Flight with Airborne Separation Assurance J. Hoekstra, R. van Gent, and R. Ruigrok ......................................................................................... 807
98-4240 A Review of Different Approaches Based on Force· Fields for Airborne Conflict Resolution K. Zeghal .......................................................................................................................................... 818
98-4241 Aircraft Collision Avoidance Trajectory Generation T. Ota, M. Nagati, and D.-C. Lee ...................................................................................................... 828
98-4242 Evaluation of Vertical Collision Avoidance Maneuvers for Parallel Approach L. Winder and J. Kuchar ................................................................................................................... 838
Session 24-GNC-15 European and American Robust Flight Control
98-4243 The GARTEUR High Incidence Research Model (HIRM) Benchmark Problem E. Muir .............................................................................................................................................. 846
98-4244 Robust Flight Control Design for the HIRM via Linear Quadratic Methods F. Amato, M. Mattei, S. Scala, and L. Verde .................................................................................... 857
98-4245 Nonlinear Dynamic Inversion and Linear Quadratic Techniques B. Escande ....................................................................................................................................... 868
98-4246 HIRM Design of a Robust, Scheduled Controller Using µ-Synthesis J. Markerink ...................................................................................................................................... 878
98-4247 Eigenstructure Assignment Applied to the F-117 A R. Colgren ......................................................................................................................................... 889
98-4248 Synthesis and Analysis of Dynamic Inversion and LPV Tailless Flight Control Law Designs J. Buffington, A. Sparks, and D. Leggett .......................................................................................... 900
98-4567 Autonomous Control for Subsonic Flight of the X-38 J. Bain and J. Sunkel ........................................................................................................................ 909 .
Session 35-GNC-16 ATM Human Factors and Operational Procedures
98-4289 An Analysis of the Effects of Data Link Equipment Rates and Facility Differences on En Route Voice Communications M. Rogers, W. Colligan, and D. Embt .............................................................................................. 923
98-4290 GUI Design for Tower and Terminal ATC Co-operation K. Shiomi, Y. Katsuyama, R. Otsuka, and T. Hiwada ....................................................................... 934
98-4291 Identification of Flow Constraint and Control Points in Departure Operations at Airport Systems H. Idris, B. Delcaire, I. Anagnostakis, W. Hall, N. Pujet, E. Feron, R. Hansman, J.-P. Clarke, and A. Odoni ................................................................................................................ 947
98-4292 New Approach to the Planning and Control of Air Traffic in the Terminal Area H. Idris and R. Simpson ................................................................................................................... 957
98-4293 Air Traffic Control Automation System Sensitivity to Storm Forecasting Errors R. Bortins and G. Hunter .................................................................................................................. 971
98-4294 Study of In-Flight Replanning Decision Aids T. Fan, D. Hyams, and J. Kuchar ..................................................................................................... 980
Session 36-GNC-17 H-infinity Flight Control
98-4295 Integrated Flight and Propulsion Control System Design, via~ Loop Shaping and Partitioning I. Postlethwaite and D. Bates ........................................................................................................... 989
98-4296 H00 Control for Turbofan Engines . C.-F. Lin and J. Ge ........................................................................................................................... 999
98-4297 Integrated Flight and Aeroelastic Control of a Flexible Transport Aircraft M. Hanel ......................................................................................................................................... 1002
98-4298 An LPV Controller for a Tailless Fighter Aircraft Simulation J. Protz and A. Sparks .................................................................................................................... 1012
WO-Withdrawn NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 7 of 22

98-4299 Robust Aircraft Control Design for Glideslope Capture in Windshear Using Gain Scheduling S.-P. Shue, R. Agarwal, and P. Shi .................................................................................................... NA
98-4300 Design and Flight Testing of an H00 Controller for the NRC Bell 205 Experimental Fly-By-Wire Helicopter A. Smerlas, I. Postlethwaite, D. Walker, M. Strange, J. Howitt, R. Horton, A. Gubbels and S. Baillie ................................................................................................................ 1023
98-4301 Robust Lateral/Directional Control for High Altitude Aircraft C.-F. Lin, J. Ge, and J. Burken ....................................................................................................... 1034
Session 37-GNC-18 Missile Guidance Ill
98-4302 An Optimal Composite Guidance Strategy For Vertically Launched Anti-Skimmer RF Missiles D.-R. Taur and J.-S. Chern ............................................................................................................. 1039
98-4303 On the Validity of Linearized Analysis in the Interception of Reentry Vehicles J. Shinar, T. Shima, and A. Kebke .................................................................................................. 1050
98-4304 Blended Homing·Guidance Law Using Fuzzy Logic P. Menon and V. lragavarapu ............................................................................................................ NA
98-4305 Exo-Atmospheric Intercept with J2 Correction D. Zes ............................................................................................................................................. 1061
98-4306 Fuzzy Missile Guidance Laws P. Creaser, B. Stacey, and B. White ............................................................................................... 1067
98-4307 Midcourse Motor and KKV Divert Propellant Allocations for an Exo-atmospheric C Interceptor C. Phillips and S. Malyevac ............................................................................................................ 1072
Session 38-GNC-19 Advanced FilteringTechniques
98-4308 Autonomous LEO Orbit Determination from Magnetometer and Sun Sensor Data M. Psiaki ......................................................................................................................................... 1086
98-4309 A Generalized Approach to ~he Problem of Qistributed Kalman Filtering V. Tupysev ...................................................................................................................................... 1097
98-4310 Extension of Kalman Filter Theory to Nonlinear Systems with Application to Wing Roel< Motion S.-P. Shue, R. Agarwal, M. Sawan, and K. Rokhsaz ................ .................................................... 1117
98-4311 The Effects of Delayed Sensor Requests on Sensor Manager Systems L. Pao and M. Kalandros ................................................................................................................ 1127
98-4312 The Use of Pseudo-Linear and SDARE Filtering for Satellite Angular-Rate Estimation R. Harman and I. Bar-ltzhack ......................................................................................................... 1136
98-4313 Adaptive Two-Step Filter with Applications to Bearings-Only Measurements Problem Z. Di and M. Chundi ........................................................................................................................ 1145
Session 39-GNC-20 Experimental Methods in Control of Flexible Structures . .
98-4314 Experimental Evaluation of the Torque Shaping Method for Slew Maneuver of Flexible Space Structures J. Suk, Y. Kim, and H. Bang ........................................................................................................... 1151
98-4315 Multivariable Control of Flexlab Using Experimentally Determined Models T. Adami and D. Irwin ...................................................................................................................... 1162
98-4316 Flexible Structure Model "Construction" for Control System Design B. Madelaine and D. Alazard .......................................................................................................... 1165
98-4317 Experimental Study on Control of Tethered Subsatellite System in the Rotational Field H. Fujii and N. Koga ........................................................................................................................ 1176
98-4318 Dynamics of Piezoactuators and Piezosensors in Flexural Vibrations A. Yousefi-Koma and G. Vukovich .................................................................................................. 1182
98-4319 MACE II: A Space Shuttle Experiment for Investigating Adaptive Control of Flexible Spacecraft K. Denoyer, D. Hyland, L. Davis, and D. Miller ............................................................................... 1191
XVI WO-Withdrawn NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 8 of 22
Session 40-GNC-21 Nonlinear Control
98-4320 Nonlinear H00 Method for Control of Uncertain Wing Rock Motions S.-P. Shue, P. Shi, R. Agarwal, and M. Sawan ............................................................................... 1197
98-4321 Nonlinear Optimal Control Design of a Missile Autopilot T. Mclain and R. Beard ................................................................................................. ~ . 1209
98-4322 Stability Analysis of Dynamic Inversion Controllers Using lime-Scale Separation C. Schumacher, P. Khargonekar, and N. McClamroch ................................................................... 1217
98-4323 Dynamic Inversion to Control Large Flexible Transport Aircraft I. Gregory ........................................................................................................................................ 1224
98-4324 Reduced Sensitivity Nonlinear Control of an Aeroelastic Wing with Torsional Nonlinearity R. Rogers ........................................................................................................................................ 1233
98-4325 Sub-Optimal Nonlinear Adaptive State Filtering R. Williams Jr. and A. Parlos .......................................................................................................... 1239
Session 41-GNC-22 Spacecraft GN & C II
98-4326 Qualification of the International Space Station Rate Gyro Assembly K. Stewart ....................................................................................................................................... 1250
98-4327 Neural Net Approach to Star Tracker Spatially Dependent Noise Cancellation R. Welch and A. Wu .......................................................................................................................... NA
98-4328 lime-Optimal Control of Axi-Symmetric Rigid Spacecraft H. Shen and P. Tsiotras .................................................................................................................. 1259
98-4329 A Re-entry Guidance Law Employing Simple Real-Time Integration K. lshizuka, K. Shimura, and S. lshimoto ....................................................................................... 1273
98-4330 Distribution of Points on a Sphere with Application to Star Catalogs R. Bauer .......................................................................................................................................... 1282
98-4331 Probability Analysis of Pattern Match Algorithm for Spacecraft Attitude Acquisition G. Didinsky and A. Wu ....................................................................................................................... NA
Session 53-GNC-23 GN&C Components and Avionics
~8-4399 The Design, Fabrication, and Testing of a Micromechanical Silicon Oscillating Accelerometer K. Gibbons, J. Borenstein, D. Nokes, M. Weinberg, and D. Trumper ............................................ 1296
Q.8-4400 Performance of MEMS Inertial Sensors A. Kourepenis, J. Borenstein, J. Connelly, R. Elliot, P. Ward, and M. Weinberg ........................... 1307
98-4401 Fiber Optic Rate Gyros as Replacements for Mechanical Gyros S. Bennett, R. Dyott, D. Allen, J. Brunner, R. Kidwell, and R. Miller .............................................. 1315
9~-4402 Strategic IFOG Technology Development R. Carson, D. Rozelle, and D. Krepp ................................................................................................ NA
98-4403 Low Cost FOG IMU H. Califano, P.-H. Lo, and D. Siebert ..................................................................... .................... NA
98-4404 A Micro-Mechanical INS/GPS for 5" Navy Munitions J. Dowdle and K. Fleuckiger .............................................................................................................. NA
98-4405 Proposed IEEE Accelerometer Standard and Other Inertial Sensor Standards M. Ash, H. Morris, and R. Peters .................................................................................................... 1322
98-4406 The Design and Integration of Electromechanical Actuators within the U-2S Aircraft R. Colgren and M. Frye .................................................................................................................. 1331
Session 54-GNC-24 X-33 GN&C
98-4407 Development of the X-33 Guidance, Navigation, and Control System H. Youssef .......................................................................................................................................... NA
98-4408 X-33 Trajectory Optimization and Design A. Hill, D. Anderson, D. Coughlin, and R. Chowdry .......................................................................... NA
98-4409 Ascent, Transition, Entry, and Abort Guidance Algorithm Design for the X-33 Vehicle J. Hanson, D. Coughlin, G. Dukeman, J. Mulqueen, and J. Mccarter ............................................. NA
WO-Withdrawn XVII
NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003 Page 9 of 22

98-441 O Flight Dynamics and Stability and Control Characteristics of the X-33 Vehicle H. Lee, M. Chang, M. Kaiser, and C. Beck ....................................................................................... NA
98-4411 X-33 Attitude Control System Design for Ascent, Transition, and Entry Fight Regimes N. Hendrix, M. Gallaher, and C. Hall ................................................................................................. NA
98-4412 Terminal Area Energy Management and Approach/Landing Guidance and Control Design for the X-33 Vehicle L. Olson ............................................................................................................................................. NA
98-4413 Deterministic Reconfigurable Control Design for the X-33 Vehicle E. Wagner, J. Burken, C. Hanson, and J. Wohletz ........................................................................ 1342
98-4414 Sliding Mode Control of the X-33 in Launch and Re-Entry Modes Y. Shtessel, J. McDuffie, M. Jackson, C. Hall, M. Gallaher, D. Kr~pp, and N. Hendrix ................. 1352
Session 55-GNC-25 Missile Navigation and Control I
98-4415 Radome Compensation Using Adaptive Dither W. Willman ...................................................................................................................................... 1363
98-4416 Assessment of Integrated GPS/INS for the EX-171 Extended Range Guided Munition E. Ohlmeyer, T. Pepitone, and B. Miller .......................................................................................... 1374
98-4417 H00 Static Output Feedback Controller for a Seeker Scan Loop System A. Poncela and W. Schmitendorf .................................................................................................... 1390
98-4418 Gain Scheduled Missile Autopilot Design Using a Control Signal Interpolation Technique D. Lawrence, J. Kelly, and J. Evers ................................................................................................ 1394
98-4419 Concept Definition of Surface-to-Air Missile Systems and Their Subsystems on the Basis of Mathematical Modeling L. Vichnyakova and V. Kukhtenko .................................................................................................. 1403
98-4420 Attitude Control System Design for Return of the Kistler K1 Orbital Vehicle D.·Rubenstein and D. Carter .......... : .............................. ..-............................................................... 1410
Session 56-GNC-26 Flight Control Design and Applications
98-4421 Robust Decoupled Flight Control Design Using Dynamic Inversion and Quantitative Feedback Theory S. Snell, R. Hess, and W. Siwakosit. ................................................................................................. NA
98-4422 Formation of Sketching Rules for a Multivariable Evans Design Technique B. Newman and D. Fu .................................................................................................................... 1423
98-4423 Lateral Directional Aircraft Control Using Eigenstructure Assignment W. Garrard ........................................................................................................................................ WO
98-4424 Symbolic Analysis of Linear Quadratic Control Numerator and Denominator Factors A. Kassem and B. Newman ........................................................................................................... 1434
98-4425 Autopilot Design Rules and Guidelines W. Branch ....................................................................................................................................... 1445
98-4426 The E-6A Orbit Improvement System and its Effect Upon LTWA Verticality D. Brushwood, A. Olson, and J. Smyth .......................................................................................... 1453
98-4427 Longitudinal Autostabilization of an Agile Rotary-Wing RPV J. Silva and M. Kellett ..................................................................................................................... 1459
98-4428 Longitudinal Flight Control for Space Vehicle's Automatic Landing Y. Miyazawa, T. Motoda, T. Izumi, and T. Hata ............................................................................... 1466
Session 57-GNC-27 Spacecraft Attitude Determination Control I
98-4429 Real Time Digital Simulation of An Autonomous and Magnetic Attitude Control System of a Satellite S. Vargas Prudencio and M. Lopes de Oliviera e Souza ............................................................... 1479
98-4430 Satellite Attitude Control Using Only Magnetictorquers P. Wang and Y. Shtessel. ................................................................................................................ 1490
XVIII WO-Withdrawn NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 10 of 22
98-4431 System Trades using the Asymptotic Bode-Step Method B. Lurie, A. Ghavimi, F. Hadaegh, and E. Mettler .......................................................................... 1499
98-4432 Robust Spacecraft Attitude Control Using Sliding Mode Control D. Shin and J. Kim .......................................................................................................................•.. 1508
98-4433 Existence of Nonsingular Steering in Redundant Single Gimbal Control Moment Gyroscope Systems Z. Wu and H. Wu ............................................................................................................................ 1519
98-4434 HS601 HP Spin Stabilization Using a Transverse Wheel for Any Inertia Ratio R. Fewell, R. Milford, and J. Yocum ............................................................................................... 1525
Session 58-GNC-28 Optimal Control and Estimation
98-4435 LQG/LTR Robust Flight Control Design with Enforced Controller Bandwidth Restriction K. Kienitz and G. Grubel ................................................................................................................. 1536
~8-4436 Design and Implementation of a Control Allocation Toolbox for MATLAB® v. 5.0 M. Glaze and W. Durham ............................................................................................................... 1544
~8-4437 Design of Quadratic Regulators for Discrete-lime Polynomial State-Affine Systems E. Rodrigues ................................................................................................................................... 1554
98-4438 On the Boundary Recursion for Descriptor Systems and Its Applications to Estimation T.-J. Yu, C.-F. Lin, and P. Mueller ................................................................................................... 1565
9~-4439 Optimal Estimation of Wind and Turbulence from Flight Recordings P. Costes and J. lrvoas ................................................................................................................... 1575
Session 59-GNC-29 System Identification for Flexible Structures
98-4440 Accelerated Convergence of Neural Net System Identification Algorithms via Principal Component Analysis D. Hyland, L. Davis, and K. Denoyer ............................................................................................. 1585
9S-4441 Model Refinement Using Eigensystem Assignment P. Maghami ................................................. ~ ................................................................................... 1597
98-4442 Robust Control of Identified Reduced-Interval State Space Model J.-S. Lew, S. Ahmad, and L. Keel ................................................................................................... 1609
98-4443 Modal Integral Evaluation for Flexible Multibody Systems J. Storch .......................................................................................................................................... 1619
98-4444 Closed-Loop System Identification by Residual Whitening C.-H. Kuo, S. Chinvorarat, J.-K. Huang, and M. Schoen ................. ........................................ 1630
98-4445 Input Design for Systems Under Identification M. Schoen, C.-H. Kuo, S. Chinvorarat, J.-K. Huang, and H.-C. Lee ............................................. 1639
Session 71-GNC-30 Trajectory Analysis and ATM Tool Development
98-4476 A Genetic Algorithm for Determining Optimal Flight Trajectories S. Mondoloni ..................................................•................................................................................ 1646
98-4477 Simulator Evaluation of Autopilot-Coupled Short Final Approaches J.-P. Clarke, R. Nicholson, and A. Houck ......................................... ............................................. NA
98-4478 Delay Exchanges in Arrival Sequencing and Scheduling G. Carr, H. Erzberger, and F. Neuman ............... : ........................................................................... 1657
98;4-479 Field Evaluation of Descent Advisor Trajectory Prediction Accuracy for En-route Clearance Advisories S. Green, R. Vivona, M. Grace, and T.-C. Fang ............................................................................. 1668
98-4480 Field Test Evaluation of the CTAS Conflict Prediction and Trial Planning Capability B. McNally, R. Bach, and W. Chan ................................................................................................. 1686
98-4481 Preliminary Results of the Impact of CTAS Information on Airline Operational Control R. Zelenka, R. Beatty, and S. Engelland ........................................................................................ 1698
98-4482 Final Approach Spacing Tool (FAST) Velocity Accuracy Performance Analysis T. Mueller and J. Robinson 111 ••••••••••••••••••.•••••••••..•••••••••••••.•••••••••••••••••••••••••••••••••••••••••••••••••••.••••••••• 1711
WO-Withdrawn XIX
NA-.Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 11 of 22
Session 72-GNC-31 Intelligent and Supervisory Flight Control
98-4483 Fault Tolerant Flight Control via Adaptive Neural Network Augmentation R. Rysdyk and A. Calise ................................................................................................................. 1722
98-4484 Automatic Landing System Design Using Fuzzy Logic K. Nho and R. Agarwal ................................................................................................................... 1729
98-4485 An Adaptive Neurocontroller for a Nonlinear Combat Aircraft Model P. Gili and M. Battipede ..................................................................................................................... NA
98-4486 A Design of ALFLEX Flight Control System Using Fuzzy Gain-Scheduling A. Fujimori, Z. Wu, P. Nikiforuk, and M. Gupta ............................................................................... 1739
98-4487 Integration of On-line System Identification and Optimization-based Control Allocation J. Buffington, P. Chandler, and M. Pachter ............................... ................................................... 1746
98-4488 Detecting and Identifying Multiple Failures in a Flight Control System S. Gopisetty and R. Stengel ........................................................................................................... 1757
98-4489 A Performance Prediction Tool for General Aviation Flight Management M. Kettering and D. Biezad ............................................................................................................ 1766
Session 73-GNC-32 Missile Navigation and Control II
98-4490 An Adaptive Autopilot Design for Guided Munitions A. Calise, M. Sharma, and J. Corban ............................................................................................. 1776
98-4491 Augmentation of Gain-Scheduled Missile Autopilots Using Adaptive Neural Networks M. McFarland .................................................................................................................................. 1786
98-4492 Self-Scheduled Missile Autopilot Using Parameter-Varying Robust Control H. Buschek ..................................................................................................................................... 1793
98-4493 Output-Redefinition Based on Robust Zero Dynamics S.-G. Kim and M.-J. Tahk .................................................................................................................. NA
98-4494 Adaptive Techniques for Multiple Actuator Blending P. Menon and V. lragavarapu ...................... .................................................................................. NA
98-4495 Adaptive Critic Based Neural Works for Agile Missile Control D. Han and S. Balakrishnan ........................................................................................................... 1803
Session 74-GNC-33 Estimation and Tracking
98-4496 Efficient and Optimal Attitude Determination Using Recursive Global Positioning System Signal Operations J. Crassidis, E. Lightsey, and F. Markley ........................................................................................ 1813
98-4497 On-line Aircraft Engine State and Parameter Estimation V. Cheng, P. Menon, G. Chatterji, and S. Adibhatla ......................................................................... WD
98-4498 Comparison of Methodologies for Predicting the Future Position of an Anti-Ship Cruise Missile J. Chisholm ........................................................................................................................................ NA
98-4499 Robust Failure Detection for Reentry Vehicle Attitude Control Systems R. Agustin, R. Mangoubi, R. Hain, and N. Adams ............................................................................. NA
98-4500 Optimal Trajectory Planning and Tracking of a PVTOL Aircraft Using Higher-Order Method N. Faiz and S. Agrawal ................................................................................................................... 1824
98-4501 Implementation and Analysis of Target Tracker in Fire Control System C.-F. Lin, X. Feng, T.-J. Yu, N. Coleman, and R. May .................................................................... 1835
Session 75-GNC-34 Feedback Control
98-4502 Gain-Scheduled Controller Design with Time-Domain Constraints R. Prasanth and R. Mehra .............................................................................................................. 1842
98-4503 Wide-Range Stabilization of an Arm-Driven Inverted Pendulum Using Linear Parameter-Varying Techniques H. Kajiwara, P. Apkarian, and P. Gahinet ....................................................................................... 1853
WO-Withdrawn NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 12 of 22

98-4504 Decentralized Design for Integrated Flight/Propulsion Control of Aircraft Z. Chen and P. Voulgaris ................................................................................................................ 1866
98-4505 H00 Control via Measurement Feedback for Linear Systems with Delayed State and Control J. Ge and C.-F. Lin ......................................................................................................................... 1873
98-4506 Time & Frequency Domain Conditions for Stable Control of Distributed Parameter Systems M. Balas .......................................................................................................................................... 1879
98-4507 A Survey on the State Response for Two-Time-Scale Systems by a Unified Approach with an Aircraft Application K.-H. Shim and M. Sawan .............................................................................................................. 1890
Session 76-GNC-35 Spacecraft Attitude Determination and Control II
98-4508 Sequential Gyroless Attitude/Attitude-Rate Estimation Using Integrated-Rate Parameters Y. Oshman and F. Markley .............................................................................................................. 1900
98-4509 Design, Implementation, Testing, and Flight Results of the TAMM Kalman Filter S. Andrews and W. Morgenstern .................................................................................................... 1911
98-451 O An Information Filter Approach to Rapid System Identification: Convergence Speed and Noise Sensitivity D. Hyland and K. Denoyer .............................................................................................................. 1919
98-4511 Reduction of Propagated Attitude Estimation Errors Using Orbital Rate Coupling in a Kalman Filter Formulation D. Bruno .......................................................................................................................................... 1931
98-4512 Attitude Determination Using Two Satellites of Global Positioning System W. Jie, Z. Wei, and J. Zhou ............................................................................................................ 1940
98-4513 An Integrated GPS/Gyro/Smart Structures Architecture for Attitude Determination and Baseline Metrology G. Creamer, G. Kirby, R. Weber, A. Bosse, and S. Fisher ............................................................. 1945 .
Session 77-GNC-36 Innovative Approaches to Flexible Structure Control
98-4514 Complexity Mitigation by Active Control A. Bukley and C. Johnson .............................................................................................................. 1956
98-4515 Passivity and Noncollocation in the Control of Flexible Structures C. Damaren .................................................................................................................................... 1966
98-4516 Appending a Synthetic Mode to Compensate for Truncated Modes in Colocated Control X. Zhu and T. Alberts ...................................................................................................................... 1976
98-4517 A Linear Matrix Inequality (LMI} Based Approach for Robust Interior Noise Control A. Sampath, R. Prasanth, and R. Mehra ........................................................................................ 1981
WO-Withdrawn XXI
NA-Not Available
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 13 of 22

A98-37020 AIAA-98-4120
Re-entry and Terminal Guidance for Vertical-Landing TSTO(Two-Stage to Orbit)
Yoshiyuki Ishijima·, Shuichi Matsumoto· and Kentaro Hayashi ..
Abstract There are several concepts of RL V(Reusable Launch
Vehicles), which are most efficient to reduce transportation cost. We selected a VTVL(Vertical Takeoff and Vertical Landing) and TSTO(Two-Stage to Orbit) type as simulation models because such types were not investigated in the past research. The most critical problem about the vertical-landing TSTO is landing of the first stage within a limited area. This paper describes the model and a proposed new re-entry and terminal guidance for the first stage of TSTO and shows the results of total guidance simulations. The guidance includes the estimation of the remainder of downrange(range-to-go) using numerical integration of equations of motion. The accuracy of the guidance law was improved compared with a traditional drag deceleration guidance which is commonly adopted for winged re-entry vehicles. The robustness of the total guidance law was confirmed by the results of error analyses.
1.IntroduCtion Recently, the research about Reusable Launch
Vehicles(RLV)1• 2. 3 is becoming more active, because
they have the potential to reduce the cost of space transportation. National Space Development Agency of Japan (NASDA) has been studying various concepts of the Reusable Launch Vehicles (RLV). They are effective in reducing the cost of transportation over traditional Expendable Launch Vehicles (ELV). There are several kinds of the rocket-propelled RLV's, one of them is the single-stage to orbit vehicle (SSTO), an alternative is the two-stage to orbit vehicle(TSTO). Although lightened structure and highly efficient engines are required for the SSTO, it is very effective in reducing operational costs. On the other hand, while the TSTO has higher operational costs, it has the efficiency to transport the payload. It is necessary to examine which type is profitable for the future RL V from various points of view such as total cost, technical feasibility, operation and so
• National Space Development Agency of Japan •• Mitsubishi Space Software, Co., Ltd., Japan
on. There are few studies about the TSTO in the past
research. Much is unknown about the flight characteristics and the requirements for the total system are not clarified. We selected a VTVUI'STO type as a simulation model. The merits of the type are as follows;
• It is efficient to transport payload. • The technologies for traditional vehicles can be
applied, such as propulsion, structure, and so on.
Figure 1 illustrates the outline of flight sequence. A VTVUI'STO type is expected to have the capacity to transport more payload than a winged or SSTO type, because it is efficient in terms of the light structural mass. We assumed the first stage is recovered and transferred to the launch site on a large tanker or pontoon. By changing the first stage landing positions, the TSTO system can transport payloads to various orbits. , Moreover, we can apply the traditional technologies for EL V such as propulsion, structure, and can reduce the risk of the system development.
In order to land in a limited area such as a tanker on the sea, the re-entry and terminal guidance should be accurate and robust. In the reentry phase, it has lower UD (Lift-to-Drag ratio), returns at a lower speed than SSTO. The available crossrange and downrange is only 50km-200km, by controlling the bank angle. It is effective for accurate range estimation to integrate equations of motion, and the effect of aerodynamic perturbation. By improving the re-entry and glide guidance accuracy, the required engine duration time, which is nearly proportional to the amount of propellant mass, is shortened and the advantage of the TSTO is enhanced. We propose a new re-entry guidance law which includes numerical integration for flight range prediction. We performed total guidance simulations from re-entry to landing and evaluated the total performance of the re-entry and terminal powereddescent guidance law.
Copyright© 1998 by the American Institute of Aeronautics and Astronautics Inc. All rights reserved.
192
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 14 of 22

Scparatioa o{ the first and second stage ••••••••••••••••••-••••• .... _¢3".. lmcrdontomissionorbit
~---&..._ 1' "01' ·~ Rccatry Phase , ,,
I ~
1.5
LO
- - - , - - - -1- - - - i - - - -1- - - - l
I I I
M=0.4
Ii -
•Ascent Phase '-.. Rotation Manucvcr
f Glide Phase~• Powaod-DaceDI
Al ~-~-
I I I, o.s - - -I - - - - i- . M=3 + - - - -1- -1
I~ ~
Figure 1 Outline of the flight sequence
2.Simulation Model The vehicle is assumed to be capable of transporting
25 ton of payload to low earth orbit. The second stage is a no-winged and expendable type, as shown in Table 1 and Table2.
Table 1 Assumptions ·Payload Mass 25 ton (reusable second stage)
13 ton (expendable second stage) ·Orbit altitude h 200km
inclination i 30deg circular orbit
·Launch Site Tanegashima Space Center 30.4Ql'N 130.98G E
Table 2 Outline of the model
Mass( ton) First Second Staee Sta2e
Reusable Expendable Total Mass 507 93 93 Propellant Mass 436 60 60
For Ascent 406 60 60 For Rotation 30 - -
and Landing
Structural Mass*l) 71 20 8
Pavload Mass --- 13 25
*1) including the mass of tank, engines, inert.
CFD analyses and wind tunnel tests were carried out to provide longitudinal aerodynamic coefficients such as CL, CD.
0 10 40 50 AJ>cle of anac:t (deg)
Fi"4re 2 LID characteristics of the first stage
3. Outline of Guidance Law Table 3 shows flight sequence. After the separation, the
first stage flies into the atmosphere and the guidance is performed by controlling aerodynamic force. After the glide, the vehicle re-ignites the main engines, and changes its attitude from nose-first to tail-first. In the landing phase, the vehicle performs vertical powereddescent while compensating the errors caused in the reentry and glide phases. Fmally it lands softly throttling the thrust.
Table 3 Flight sequence
Event Condition Reentry Guidance Start Relative Velocity 3300 mis
··-··-·-··--···-····-·-····-············-··-·· .. ~!?!?.~~.!!~!?~!!~!L?-~f... ..... Reentrv Guidance End Relative Vclocitv 870 mis
._Qli!!~.~!~~-~-~--··········---· .. ~!?~~~.'?-Y.!?!~9!Y. ....... ~QQ . .!!Y.L ......... . Glide Guidance End Altitude 6.5 km
Rotation Maneuver Start Altitude 5.3 km
.. (~~~t£itc~-~_!:2. .. ·-····-·······- ··-···········-·················-··-··-····-·-········--·
193
Rotation Maneuver End Altitude 2.2 km
/Powered-Descent Start Landin2 Altitude 0.0 km
3.1 Re-entry Guidance l)Real-time Numerical Integration law
In the reentry and glide phases, the guidance module generates commands of the bank angle <I> to control the range-to-go R. The range-to-go R is predicted by the integration of th.e
equations of motion shown in (1).
r=v (1)
The aerodynamic acceleration vector a is a function of bank angle <I> • The gravitational acceleration vector g is a function of the position vector r and the function includes the harmonic terms Ji ......, ls.
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 15 of 22

The bank angle command q, • is determined directly
based on the sensitivity calculated by the difference of R at the condition of 4> = q,0 and 4> = 4'1 •
(2)
where RN is the range-to-go to the target obtained from navigation data. q,0 and q,1 are defined by
<P1 =<Pc' + ll.</J <Po =<Pc' - ll.</J fl.</> = kll.<P'
(3)
I
4>. is the guidance command in the previous cycle. The
increment Ll </J is also updated by a multiplier k at every guidance cycle and k is controlled in order to prevent divergence of solution within the range where l!.R/ . tin /fl</> is ear.
The crossrange guidance is performed by the reversals of the bank angle. The heading angle from the vehicle to the target should be kept in a allowable error and the reversals occur when the error of the heading angle is out of the specified dead-band showed in Figure 3. Angle of attack is scheduled as a function of relative velocity.
Tar~ __ · __ ~-~~ative Velocity Vector V -.r- . - - L - =-::::-:::... Vehicle
Heading Angle tP
6 ----.,-----r----;-----1
~ ____ J _____ L ____ J ____ _
Relative Velocity(rn!s)
Figure 3 Bank reversal condition
At an lower altitude, the angle of attack is added to control parameters because frequent bank reversals may degrade guidance accuracy. The guidance commands
ac and <Pc are the solutions of (4).
(4)
where rT is the terminal position vector. a c and </J c
are calculated by the similar scheme adopted in the reentry phase. The angle of attack is commanded in order to control the range-to-go, while the bank angle is to control crossrange.
194
The commands such, as <!> c and a 0 are converted to the angular rate vector command cu .B (pitch, roll, yaw) in the vehicle body fixed coordinate system using the rotational axis unit vector n and rotational angle () which appear in quaternion expression q. The q denotes the quaternion between the present vehicle fixed coordinate system and desired one.
B f} w =-n
c flt
[
. 8 nsm-
q- 2 8 cos-2
(5)
(6)
The desired coordinate system can be obtained from the commands <!> c and a c·
2) Other Re-entry Guidance Law The conventional laws, which are adopted for Shuttle4
and HOPE, use analytical formulae for the prediction of terminal Conditions. In order to confirm the performance, we compare the re8ults of the new guidance law with those of a existing drag deceleration guidance, which assumes steady-state flight along a specified drag deceleration profile. The range-to-go is controlled by shifting the profile upward or downward. The four subphases are set as illustrated in Figure 4. In order to adjust low UD characteristics and assume drag deceleration profiles as polynomial functions of relative velocity for each sub-phase. In order to fly along the profile, the vertical component command of UD (L!D)v,c and bank angle command <Pc are determined based on the conventional feedback law by
Drag deceleration Dim
I I I I I I
I I I I Phase 4 I l'hase3 I
f
l
Phase 2
Drag deceleration profile Dim-
Figure 4 Drag deceleration guidance velacity v
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 16 of 22

Flight path angle becomes larger than other reentry vehicles from l.EO(Low Earth Orbit) because of its low relative velocity. Drag deceleration guidance laws adopt analytical formulae for range estimation and such a fonnulation needs the approximation flight path angle y - O. Range prediction formula is derived from the
following approximated equation (9).
dR Vcosy V -- --- (9) dV D/m+gsmy Dim
In TSTO reentry cases, range prediction error is never negligible and affects the total guidance perfonnance m view of low controllability of downrange and short duration of guidance. Moreover, m the cases that the vehicle cannot fly along a specified deceleration profile, the guidance error mcreases.
Table 4 A sample of reference drag deceleration profile
s.o
i 0.0
:!!.. -Q -S.O ~ ..c if -10.0
~ Ii:
-15.0
-20.0
Phase 1 Phase2 Phase 3 Phase4
0
................. ···-·· ............................. .. • I I • e I I . . . . . . . I I O • t • e . . . . : :
···-··········· : • SSTO : : (from LEO) : .............. ~. . -: . . .
TSTO : . . . . . . . . . . . .... ~--···-:·· ··:·· ···::-·····:····-~-----~ . . .. . : :
: reentty • , reentty : --- i guidance •••• ; •• !. guidance; ..... ; ..... ~
1• end • • start • • • .:/ : •_/• : : :
slf I .. I I I e
1000 2000 3000 4000 SOOD 6000 7000 Relari"" Velocity(m/s)
Figure 5 Flight path angle wofile
Figure 5 shows the comparison of the fligltt path angle profiles between TSTO case and SSTO case. The SSTO is assumed to return from low earth orbit(LEO) at an altitude of 400km. The path angle m the TSTO case becomes much larger than the SSTO case. Figure 6 shows the sample results of guidance error analyses m the re-entry phase. Total flight are divided mto four subphases as shown m Table 4 and the range-to-go is predicted by analytical formulae. Simulation parameters, such as initial and target conditions and error sources, are same as described in 4.1. These results mean the difficulty to apply such a drag deceleration guidance to TSTO re-entry cases.
195
10 - - - - - r - - - - -,- - - - - -· - - - - - -1 0 1 Drag deceleration Guidance
e 5 c ~ 0
~ u -5
_____ : _____ '!:.New Proposed Guidance_: I O I I I I ~oo I I
- ~ - - - :_o _ - o •••I ---:- ---= - ~ I I I I I I I I I I
-----~-----~----~-----~
I -10 i-. __ _......_ __ _... ___ ...._ __ _
-10 -5 0 5 10 Downrange(km)
Figure 6 A sample re-entry guidance simulation results (Evaluated at an altitude oflO/an)
3.2 Powered-Descent Guidance This phase consists of the two sub-phases. In the first
sub-phase, "rotation sub-phase", the vehicle rotates at a constant pitch rate(lOdeg/s), in order to decelerate and perform vertical-descent m the following sub-phase. In the second sub-phase, "landing sub-phase", the
guidance module commands the thrust acceleration vector ar. The acceleration profile is assumed to be a polynomial function of time, that formula is derived from the theory of calculus of variation5•
(10)
By analytical mtegration, the position and velocity vectors can be written by
t2 v(t) = v0 +(c0 +g)t +c12
,2 t3 r(t)=r0 +v0t+(c0 +g)2+C1 6
(11)
The gravity acceleration vector g is assumed to be constant during the descent. Unknown vector c0, c1 are determmed at the beginning of this phase explicitly so that the initial and final conditions may be satisfied. The state profiles are made on the vector c0, c1, and time-togo T go· T go is determined so that the propellant mass js minimized on the condition that the maximum values of relative velocity and attitude rate do not exceed given limitations. After the determination of the nominal trajectory, the vehicle is guided along that. The acceleration vector command a. is calculated based on feedback control law.
a. = a_(h) + fr{Jr + f.,liv
{Jr= r(h )-r-(h ), fN = v(h )-v _(h) (12)
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 17 of 22

f, and f, are fixed feedback gains with position and velocity respectively. a,,,,,,., Tnom and Vnom are nominal functions of altitude which are pre-determined explicitly by (11) at the beginning of this phase. The acceleration vector ac is converted into the thrust command Tc and angular rate commarid vector in the vehicle fixed body coordinate system (J) •
8 .
4. Simulation 4.1 Outline of the Simulation
Guidance simulations from the apogee to landing were conducted in order to evaluate the performance of the guidance law described previously. The initial and target conditions and the error sources
set in the simulations are shown in Table 5 and Table 6 respectively. The engines are assumed to have the capability to
control their thrust. The throttle is bounded within. the range between 100% and 30%. The initial position and velocity errors are set based on the results of aseent guidance simulations evaluated at the apogee. Atmospheric density uncertainty and wind profiles are functions of altitude as shown in Figure 7. Wind is set in the direction of east, west, north and south respectively in the error analyses.
Table 5 Parameters Initial position Latitude 30.2907deg (Apogee) Longitude 13S.4312 deg
Altitude 89.9287km Initial velocity Relative Velocity 3317.72mls
Flight Path Angle O.Odeg Flieht Heading Anltle 90.0desz
Initial mass 101 ton Target position Latitude 29.8324deg (Landing) Longitude 141.5122 deg
Altitude 0.0 km Thrust throttle 100%-30%
(100%=194.0ton at sea level) Specific impulse 392.7 sec
(at sea level)
Table 6 Error sources considered . h la. znt e~:mu ttons
Initial Position ± 3S6SO.S m downrange (from the results from· ascent ::!: 9128.3 m crossrange l?llidance simulations) ± S977.S m altitUde Initial Velocity ± lS.50 mis downrange
± 100.83 mis crossrange ± 20.S8 mis altitude
Drasz Coefficient C. ±20% Lift Coefficient c, ±20% Atmospheric Density ±10%-65%
(function of aititude) Wind( east, west, north, ± 1Sm/s-140m/s south) (function of altitude)
196
120 - - - - - - I - - - - - - -1- - - - - - 1
I
100 - - - - - - -I - - - - - - -1- - - - - - i
e 80 c I I I
- - - - - - J - - - - - - _1_ - - - - - J I I ..
"C 60 ..3 I I _ !
- - - - - - I - - - - - - -1- - - - - I
~ 40 I I I ------,---------
20 ----------i 0
0 so 100 lSO Wind(m/s)
(a) Wind profile
r--- -r---i20- - - - ., - - - -i
! u I I I I "C i- - - - - - I- -
-~ I
--1-----1 I < r------1-- --1------,
·1 I I I
"------1-- - -1- - - - - -l 1
-100 -SO 0 SO 100 Atmospheric Density Variation(%)
(b) Atmospheric:: density variation
Figure 7 Atmospheric density uncertainty and Wind profiles
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 18 of 22

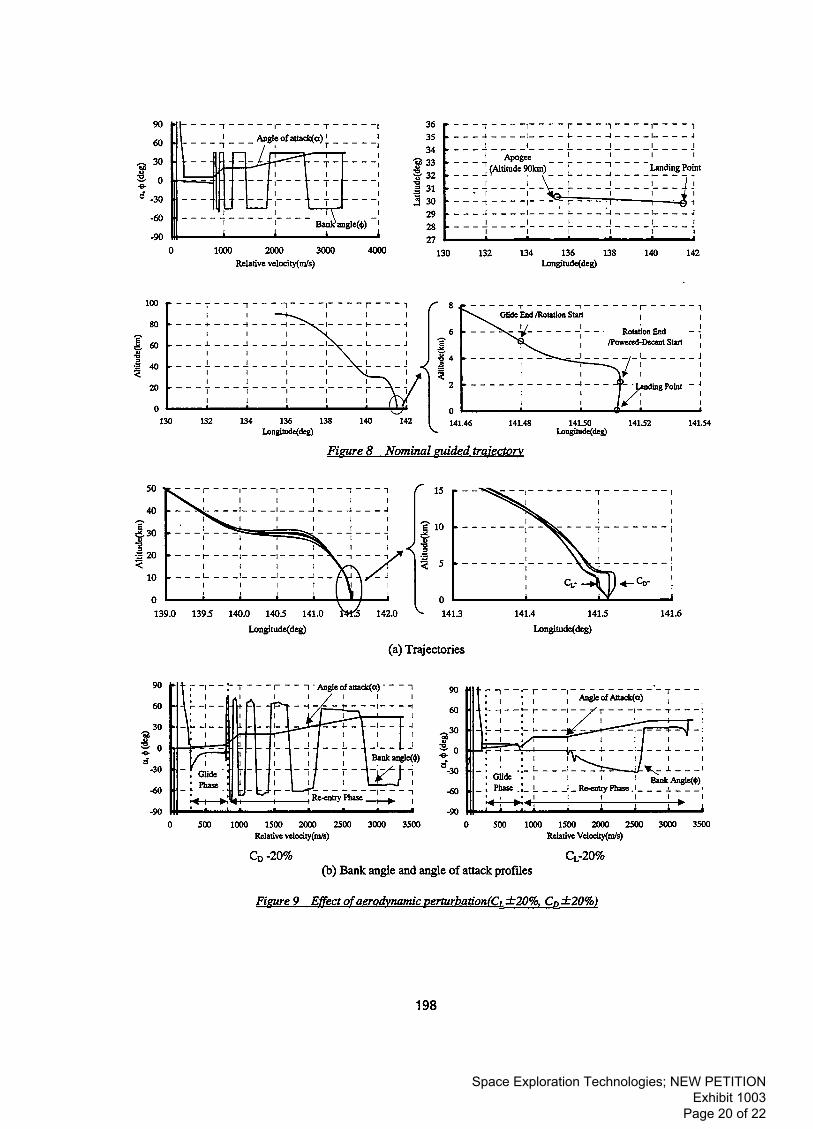
4.2 Results Figure 8 shows the nominal guided trajectory from
apogee to the landing site. A reference trajectory on the condition of (UD)m=L'Dnom *cos42.55 • (i.e. bank angle = 4255deg) is adopted for the determination of the target point on the consideration of range controllability and limitations, especially aerodynamic deceleration. Bank angle commands are limited from -75deg to 75deg, that are due to the limitations of maximum deceleration. Figures 9 and 10 show a part of the results in the cases
where aerodynamic perturbation exits, such as CL or CD uncertainty, wind. The guidance error caused by aerodynamic perturbation is reduced and terminal positions of the glide phase are within the controllable area by the powered-descent guidance. Table 7 shows the results of the error analyses considered the error sources listed in Table 6. Figure 11 ~hows guidance error evaluated at the beginning of the powered-descent. The proposed guidance law has enough robustness even in the existence of aerodynamic uncertainty. Table 8 shows the final guidance error. We can conclude that the total guidance law bas good performance enough to perform soft-landing on a specified area.
5.Concluding Remarks The reentry and terminal guidance for the first stage of
the no-winged TSTO was investigated in this study. We adopted a new reentry guidance that includes the numerical integration for range prediction. The efficiency of the law was confirmed by the total guidance simulations and error analyses.
References 1.S. Cock, "The Reusable Launch Vehicle Technology
Program",.AIJ\A-95-6153 2. W. Berry, ESA Technical Directorate, ESTEC. et. al,
"Performance and Technical Feasibility Comparison of Reusable Launch Systems: A Synthesis of the ESA Winged Launcher Studies'', IAF-95-V3.03
3. William A Gaubatz, McDonnell Douglas Aerospace,
et. al, "Ground Testing of a Fully Reusable Single Stage to Orbit Experimental System", IAF-94-v.5.552
4. J.C. Harpold, "Shuttle Entry Guidance ", AAS-78-147
5. A E. Bryson and Yu-Chi Ho "Applied Optimal Control"
197
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 19 of 22
'fjl
90
60
30
:!:!, 0 -e-
" -30
-60
-90
100
80
;[ 60 " "' = 40 ~
20
0
0
130
50
40
;[30 .g ·E 20 <
10
0
- - - - I - - - - -1- - - - - T - - - - -1 36
___ ~ ___ Angl~ofattack(a) ~ ____ -:
I - - -1
35 34
'fjl 33
~ 32 ~ 31 .3 30
29 28 27
1000 2000 3000 4000 Relative velocity(m/s)
---T---,---~----r---r---,
I
I ___ ! ___ J ___ ~ ____ L __
I I I I
---T---,---,--------r-1 I
132 134 136 138 140 142 Longitude( deg)
- - - i - - - -1- - - - r - - - I - - - -1- - - - 1
- - - ~ - - - -1- - - - l- - - - -I - - - -1- - - - .j
I I I I I I
= = = ~ - -APog~ - = = ~ = = = ~ = = = =I- ---j ___ ~ (A!titude~km) __ l- ___ -1 ____ ~~i~!<>!_nt
- - ;- ~ - - - -:- -\; f- - - - ~ - - - -:- - - ~ ~ - - - L - - - -1- - - r - - - I I ~ 1
- - - .. - - - -1- - - :.. l- - - - ''..J - - - - 1- - - - J I I I I I I
- - - I - - - -1- - - - I - - - I - - - - I- - - - i
130 132 134 136 138 140 142 Longitude( deg)
8 -----T-----,------r-----1 Glide End /Rotation Start I I
- .!/- - - - - -:- - , Rotation End -1 1 /Powered-Decent Start I
- -:- - - - ,- :- - - - - - 1 ------1-------1---
0 141.46 141.48 141.50
Longitude( deg) 141.52 141.54
Figure 8 Nominal guided trajectory
---r---r--~----,---,---, 15 I
139.0 139.5 140.0 140.5 141.0 142.0
0 141.3 141.4 141.5 141.6
90
60
30 "Oii " :!:!. 0 -e-
" -30
-00
-90
0
Longitude( deg)
(a) Trajectories
;- -1- - ;- T - - -1- - - I· Angleofattack(a)" - - I
I I I I I I I ;... -1- -
I
- ~ -1- -I
__ L_ I
-1- - .. I
_1_ - J Bank angle(9)
Glide 1---1 --r- I Phase I
- - - - - - -1- - - -, :....r-..:.-1------1--------1 Re-entry Phase -t-+ 1
500 1000 1500 2000 2500 3000 3500 Relative velocity(m/s)
C0 -20%
90
60
......,30 .. " !o c:l~30
-00
-90
0
Longitude( deg)
~I - -.- r - - -1- - - - - - - - - - T - - -1 : I : I I AngleofAttack(a) I I
;--4--. __ .J. ___ ,
I I I _, .;_L ___ I___ _ I ~J. ___ I
: Glide : I I I I Bank Angle(9) _, Phase·•- L ___ l_Rc<lltryPbase.1 ___ _,_ ___ •
• ' I I I I I [
~
500 1000 1500 2000 2500 3000 3500 Relative Velocity(m/s)
CL-20% (b) Bank angle and angle of attack profiles
Figure 9 Effect ofaerodvnamic perturbation(C, ±20%, Cp±20%)
198
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 20 of 22

15
40 .......
f 30
" ·= 20 < I I.· I I
10 ·---L---L---L---'---
0
139.0 139.5 140.0 140.5 141.0 141.5 142.0
Longilllde( deg)
0 141.3
(a)Trajectory
eo ---~----T----r---,---- I~ I I I
120 RO!atioo - - -,- - - - , - - - - 120
90 Thrust • - - ~ - - - - 100
141.4 141.5 141.6 Longitude( deg)
Thrust vector
l60 sof ~~ 00~
0 ~
-30 Glide 20
-60 L::::~~=i;;;;;;:;;;;;;;;;:;;;±;;;;;:;:;;!:.l. _ _J o 300 350 400 450 500 550
Time(sec)
(b )Thrust and q:> command profiles( east wind case) Fipre 10 Effect of wind
Table 7 Results of e"or analvses Guidance Error Required Propellant
(Evaluated at the bea lnnin~ of the nowered-descent) Mass in the powered-Position(km' Velocitv<m/s) descent
X Y Z Vx Vv Vz (ton)
Nominal 5.299 0.338 3.140 -184.32 -12.70 -126.63 21.68 CD+20% +0.908 +0.973 +10.41 -13.73 +21.88 +4.14 ··········-········:20%·-· ·-··--·····- --·~:012-- ·-0212···- ·---~is56··-- ·······-+7.84········· ······-··:35:os-··-···· --·-······~3.9i---······-··
··-··-·-···£!-:!.~--- -·-··-··- ... _:!:9.:.~.~---·· ·-···:9.:Q!Z_ .......... _:.!Q:.~ ........ ........ :9:2.~~-------- .......... :!?:~-----·· ·-····--····:!:!:?..? .... -.. ·--··· -20% +0.941 +0.914 -0.m -14.68 +13.42 +2.43
-··----·······£_"!" ______ ····--=--- ·---~-!!>_? ____ ::Q:!!ZL. ___ "!".?.:?.?.?._ .•••••••••. _:~.:?.~~----·--- ......... :!".?.:~~------·· ·······--··-··-~.:..~----··-·-··· +0.020 +0.090 -4.966 -2.468 -20.06 -0.32
Wmd East +0.121 +1.049 +7.415 +1.025 +39.46 +7.65
:::===:====:::iY.~;:: :=:::-;.:::~-~ ~~=~~~~=:= ~~:=-9~i8.::::= :::=~!:i:J.?.==:~~ ·=::=:;:?~~I::==: ::::::::~~~;§I::=:::: :::::::==:::::;.~;~1::==:::=:::: South +0.700 -0.105 +10.57 -14.95 +15.89 +2.53 ·-·-·-······N;;rth···· ·-------·--··-· -···:o.s96-- ---o.oi4 ____ ----+1:804·······- ·-····:;11:s4··----·- ···--····:;:5:102--·-··· -··-------··+ios-····--·--·-
..... ~.!.:!".?.:6% ___ ·--·--=-······ --------=---·- ---=--····- ·--·····-=-·-·- ··--·······=-----··--·· ·-··--·----;;____________ ···--------·-..:'"}.:2:t .•...... ____ _ -2.6% -1.27
............ !!1.1!.:t!:.1~---· -------=·--···· ···-·····=···----- ------=·--·-·-- ···---···-·=··----···-- ---··-····=···---·---·· ··-·······--;;····-------·· ·-·---·-······-:9:.!?. ............... . -1.4% +0.12
..... l!!~~~J~~.!C..:'"_ ·--·-···--··- -·---~:.!~--- _.:Cl:Q.~~---- ·------:~:1!!.Q. __________ ..:-?..:-?.~~------ _______ !.?.:Q?.L.. ____ ··-···········:!:9.:Q.L .. _ ........ . --·-··-·--·····--- -·-·············· ____ ±Q:Q§.? _______ -Q&JJ. ...... .......• :9.-?.J.9. ........ ···----=~:.~! ........ ......... :!"J.:9.~~---·-··· ·-··--·-·····!Q.-!:t .. -......... .
Y+ +0.099 -0.010 -0.199 -3.984 +0.479 +0.26 ·-·-·-··-·-·····-·:- ··--·-··---- ··-:;o~o39··-- ······::0:012--·- ·------~>:20s--······ ·····-·:i.S69··--···· ··--·-·-.;o:484·-····· ·-··--······:;o:16·---··-··· ·-··--·-··---··-·-- ---·-·-- ··-·--··-···· -----···--- ·--···----·-····-· --···--·····---·······-- ··-·--··············-··· ............................................. . -··-···-··-···---£.!: .... ·········-··-·-· ___ ::Q:!!1~---·- ...... !Q:!IQ.? ...... ____ .:tQ:.!g_1. .............. ±.!:~---·-··· .......... :QJ2.~---······· ·-···········-±Q:Q1. .............. .
+0.166 -0.029 +0.071 -6.732 +0.869 +0.17
:199
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 21 of 22
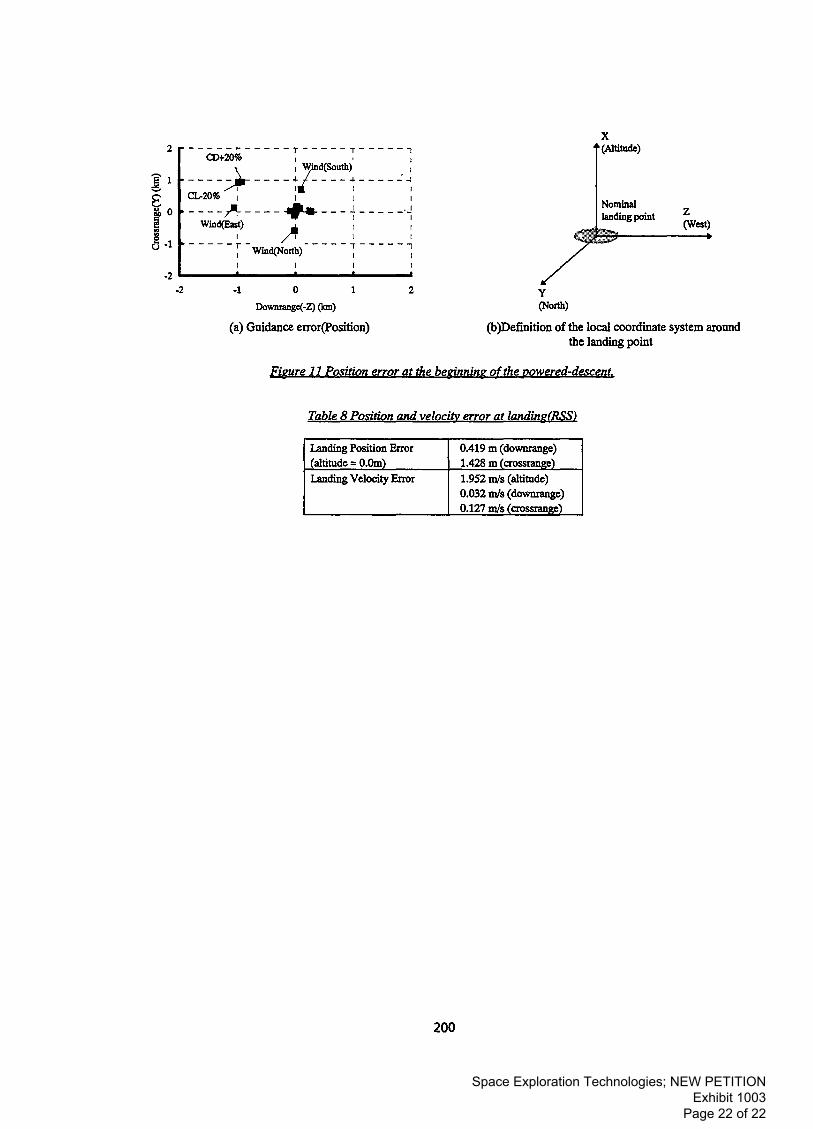
2 -----~-----T-----T-----1 CD+20% I ' I
\ 1 Wind(South) 1
----~----~/----~----~~ CL-20% I I I I
- - - -~ - - - - _,,,... - - -+ - - - - -·~ Wind(East) JI I I
I /I I I -----r- -----T-----1
I Wind(North) I I
x (Altitude)
Nominal landing point z
(West)
-2 ._ __________ .... ...._ __ _
-2 -1 0
Downrange(-Z) (km)
(a) Guidance error(Position)
2 y (North)
(b )Definition of the local coordinate system around the landing point
Figure 11 Position error at tbe bewning of the powered-descent.
Table 8 Position and velocity error at landing(RSS)
Landing Position Error altitude = o.om
Landing Velocity Error
200
0.419 m (downrange) 1.428 m crossran 1.952 mis (altitude) 0.032 mis (downrange) 0.127 mis crossran
Space Exploration Technologies; NEW PETITION Exhibit 1003
Page 22 of 22