Embed Size (px)
Citation preview

Kalyanmoy Deb Koenig Endowed Chair Professor
Department of Electrical and Computer Engineering
Michigan State University East Lansing, USA [email protected]
http://www.egr.msu.edu/~kdeb
A Theory-Based Termination Condition for Convergence in Real-Parameter Evolutionary Algorithms
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Overview ! Most Evolutionary applications in search and
optimization ! Theoretical Optimality conditions
! Karush-Kuhn-Tucker (KKT) conditions ! KKT conditions for near-KKT points ! Approximate KKT points ! “KKT Proximity” Measure (KKTPM) for single and
multi-objective optimization ! Results on standard test problems ! Termination criterion
! Practicalities of implementation ! A fast and approximate method ! Conclusions
2

3
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Evolutionary Optimization (EO): A Mimicry of Natural Evolution and Genetics
begin Solution Representation t := 0; // generation counter Initialization P(t); Evaluation P(t); while not TERMINATION do
P'(t) := Selection (P(t)); P''(t) := Variation (P'(t)); Evaluation P''(t); P(t+1):= Survivor (P(t),P''(t)); t := t+1;
od end
! " Mean approaches optimum ! " Variance reduces ! " No need of gradients
Recombination Mutation
Optimum Initial population

Adopted in Practice !"Nose of Shinkansen (Bullet Train in Japan) N700
Series http://english.jr-central.co.jp/news/n20040616/index.html
!"KONE elevator s control system (http://www.kone.com/countries/en_MP/Documents/Brochures/KONE%20Alta.pdf)
Mitsubishi Regional Jet (MRJ)
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
4

Termination Condition for EOs • Maximum # of generations achieved
• Pragmatic, but no guarantee of near-optimum • Stagnated condition
• Past τ gen, f improvement is ≤ ε • Average and best performance is close
• A target is achieved • Pragmatic, but requires knowledge
• Since none guarantees near-optimum, run EO multiple times • Can we take help of Optimization Theory?
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Together
5

Hybrid Methods are Popular
• EA followed by local search • Mutation operator of an EA uses a local search • How do we even terminate a local search
• Optimality conditions satisfied? • Are opt. conditions regular near optimum?
• Neighbor, monotonic along a line? • Surprising results follow!
optimum
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 6

Unconstrained Single-Objective Problems • Problem: Minimize f(x) • Optimality condition: x*={x | Grad f(x) = 0 & H(x)=+ve
definite} Himmelblau Function
50 40 30 20 10 5
2 4 6
x2
x1
500
ï6 ï4 ï2 0 2 4 6ï6ï4ï2
250
0
100 75 60
Norm of Gradient Vector
0 2 4 6
x2
x1
75 100
500 250
ï6 ï4 ï2 0 2 4 6
60
ï6
50 40 30 20 10 5ï4
ï2
Error(x) = ||Grad f(x)||
(4 minima) Error(x) has many zeros, Cannot be used alone Keynote Talk at EVOLVE Conference,
Iasi, Romania, 2015

Monotonicity of Error • Error reduced to zero locally
If +ve def. check on H(x) is made, four minima are found
Optimal point x=3at y=2
Norm of Gradient Vector
0
400
500
600
700
ï6 ï4 ï2 0 2 4 6N
orm
x1
200
100
300
For unconstrained Problems, norm ||.|| can be used a Proximity Measure locally
Regular, but not so in the entire space Keynote Talk at EVOLVE Conference,
Iasi, Romania, 2015

9
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Constrained Optimization Problem
! " Decision variables: x = (x1, x2 ,…, xn) ! " Constraints restrict some solutions to be feasible
! " Equality and inequality constraints ! " Minimum of f(x) need not be constrained minimum ! " Constraints can be non-linear
Min. f(x) s.t. gj(x) # 0 j = 1,2,…,J hk(x)=0 k = 1,2,…,K xi
L $ xi $ xiU i = 1,2,…,n

10
Karush-Kuhn-Tucker (KKT) Conditions
• A triplet (x, u, v) that sa2sfies above condi2ons is a KKT point, when certain constraint qualifica.on is sa2sfied
Eqm. cond.
Feasibility cond. } Complementary Slackness condition
Non-negativity of Lagrange multiplier
Variable bounds are treated as inequality constraints
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015

11
Geometrical Significance of KKT Conditions
•" 99:"(<=>"6578%257?"
•" !"$(8,6(8"54@(62-("15',257"65=(1"57'A"B$5="%7B(01%4'("15'71>"–"C%D('A"6078%80#("B5$"=%7%=,="
= -
both constr. infeasible
A KKT point need not be a minimum
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
-
Inequality constraints only
All uj must be +ve or zero
constraint is not satisfied
objective value reduces

12
Karush-Kuhn-Tucker (KKT) Necessity Theorem
• Let f, g, and h are differen.able func.ons and x* be a feasible solu.on. Let I={j|gj(x*)=0}, a set of ac.ve constraints. Furthermore, grad gj(x*) for j in I and grad hk(x*) are linearly independent. If x* is an op.mal solu.on to the NLP, then there exists a (u*, v*) such that triplet (x*, u*, v*) solves the Kuhn-‐Tucker condi.ons (x* is a KKT point)
• Linear Independence Constraint Qualifica2on (LICQ) condi2on: (strong CQ) – Implies certain regularity condi2ons – Most prac2cal problems sa2sfy the condi2on
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
13
Main Results
• KKT necessity theorem can be used to identify points that are not optimal
• If a feasible point satisfies CQ condition and if it is not a KKT point, it cannot be a minimum
• If a feasible point satisfies CQ condition and if it is a KKT point, it may or may not be minimum – Need more conditions to confirm optimality
• If a feasible point does not satisfy CQ condition, it may or may not be a KKT point or minimum
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015

14
Complementary slackness satisfied
Approximate KKT Point
•" x is "-KKT point, if given ">0, there exists ui#0 for all constraints, such that
•" Proven in Dutta et al. (2012) in J. Global Optimization (Springer Journal)
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Dutta, J., Deb, K., Tulshyan, R. and Arora, R. (2013). Approximate KKT points and a proximity measure for termination. Journal of Global Optimization, 56(4), 1463–1499.
Eqm. Cond. not satisfied but within " Complementary slackness satisfied
-KKT point, if given ">0, there exists ui#0 for all constraints, such that
Proven in Dutta et al. (2012) in J. Global Optimization (Springer Journal)
, J., Deb, K., , J., Deb, K., Tulshyan, R. and Arora, R. (2013). Approximate KKT points and a proximity measure for termination. proximity measure for termination. Journal of Global Optimization, 56(4), 1463–1499.
Eqm. Cond. not satisfied but within

15
KKT Error Metric • A feasible iterate xk found by any opt. algorithm
• Define KKT Error as “Extent of violation of Equilibrium Condition” for a feasible solution:
• Then define:
• At KKT point, KKT Error is zero • How about at a near-KKT point?
– Surprising results
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
I(xk): active constraint set

16
A Quadratic Problem with Linear Constraints
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Along x=y
Along x+y=3 Acceptable
NOT Acceptable!

17
• Discontinuity: ui=0 slightly away from boundary, but ui≠0 at boundary -> Sudden change
• x is a Modified ε-KKT point, if given ε>0, there exists ui≥0 for all constraints, such that
• Similar theorem proven for smooth and non-smooth problems leading to approximate KKT point
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Modified ε-‐KKT Point
Both Eqm. and Complementary slackness cond. are within bounds
Dutta, J., Deb, K., Tulshyan, R. and Arora, R. (2013). Approximate KKT points and a proximity measure for termination. Journal of Global Optimization, 56(4), 1463–1499.

18
Proposed KKT Proximity Metric (KKTPM)
• For a feasible iterate xk, solve
• Compute KKTPM = εk
*
• By-product: Get ui* for every constraint • Corresponding KKTPM for non-smooth problems defined
with sub-differentials of f and g.
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
# of constraints

19
A Test Problem
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
KKT Error Metric
KKT Proximity Metric
KKT Error suddenly zero
KKTPM smoothly goes to zero
A C
A C
Along AC
Along AC

20
G-Series Constrained Test Problems:
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
g01 g07
g09 g04 KKTPM can be used as termination condition
RGA Results Remarkable, as RGAs do not use any gradient information

21
Comparison with KNITRO
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
• KNITRO OptErr requires to find ui
• Similar reduction in performance metrics

22
Computed Optima and Lagrange Multipliers
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Settled once and for all
G-series problems
Refer to J of Global Optimization paper

23
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Multi-Objective Optimization: Handling multiple conflicting objectives
! " Bueno, Bonito, Barato?
A doomed car
A Dominated car
3B
Good, nice, cheap
•" Multiple solutions are optimal
•" How to apply KKTPM?
24
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
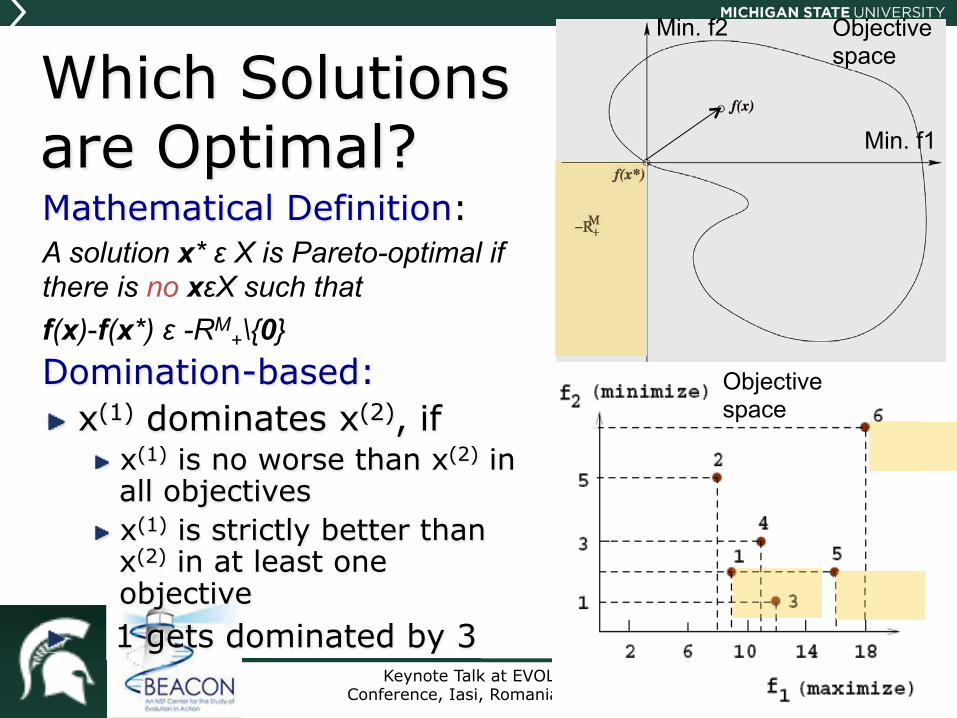
Which Solutions are Optimal? Mathematical Definition: A solution x* " X is Pareto-optimal if there is no x"X such that f(x)-f(x*) " -RM
+\{0} Domination-based: ! " x(1) dominates x(2), if
! " x(1) is no worse than x(2) in all objectives
! " x(1) is strictly better than x(2) in at least one objective
! " 1 gets dominated by 3
Min. f1
Min. f2 Objective space
Objective space

25
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Pareto-Optimal Solutions ! " P =Non-
dominated(P) ! " Solutions which are
not dominated by any member of the set P
! "O(N log N) algorithms exist
! " Pareto-Optimal set = Non-dominated(S)
! " A number of solutions are optimal
Efficient front

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Evolutionary Multi-Objective Optimization (EMO): Principle
Step 1 :
Find a set of Pareto-optimal solutions
Step 2 : Choose one from the set
26
27
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
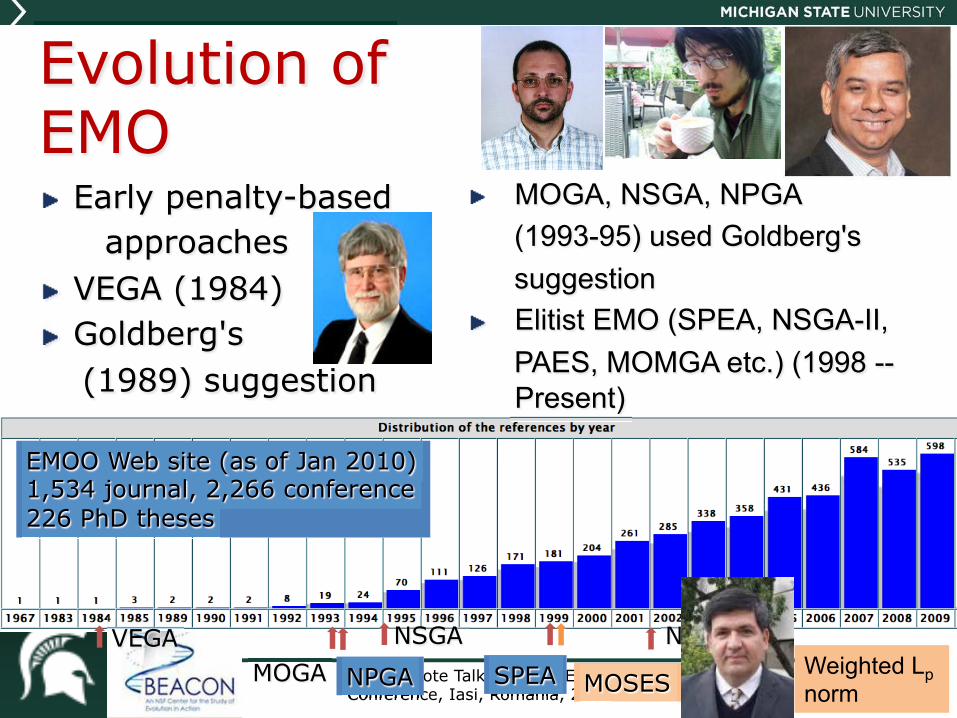
Evolution of EMO ! " Early penalty-based approaches ! " VEGA (1984) ! " Goldberg's (1989) suggestion
! MOGA, NSGA, NPGA (1993-95) used Goldberg's suggestion ! Elitist EMO (SPEA, NSGA-II, PAES, MOMGA etc.) (1998 --
Present)
EMOO Web site (as of Jan 2010) 1,534 journal, 2,266 conference 226 PhD theses
NSGA-II NSGA VEGA MOGA
Conference, Iasi, Romania, 2015 NPGA Conference, Iasi, Romania, 2015
SPEA Conference, Iasi, Romania, 2015 MOSES
Weighted Lp norm

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Elitist Non-dominated Sorting Genetic Algorithm (NSGA-II) ! NSGA-II
! Modular ! No additional parameter ! Fast
! Commercialization: ! MO-Sherpa (RCT) ! ModeFrontier (Estico) ! iSIGHT (Engeneous) ! VisualDoc (Vanderplatts)
Fast-Breaking Paper in Engineering by ISI Web of Science (Feb 04), Thomson Citation Laureate Award 2006, Current Classic and Most Highly Cited Paper (14,500 GS citations)
(Deb et al., IEEE TEC 2002)
28

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
NSGA-II Simulation on an Unconstrained Problem
•" Parallel search •" Multiple solutions in a single run
29

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
NSGA-II on a Constrained Problem
30

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Many-Objective Optimization
! Multi-objective: {2,3} objectives ! Many-objective: >3 objectives ! EMO difficulties for many-obj. problems:
1." Large fraction of population gets dominated 2." Maintaining diversity difficult 3." Recombination operator inefficient 4." Representation of PO front requires
exponentially more points 5." Performance measures difficult to compute 6." Visualization is difficult
31
One of the Main Thrusts in EMO Today

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
NSGA-III (IEEE TEC 2014) An EMO for Many-Obj. Optimization
•" Guided search through supplied reference pts
•" Similar to NSGA-II selection
•" Niching through selecting points close to reference lines •" Normalization •" Association •" Niching No additional parameter needed
32

Some Results of NSGA-III
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
15-obj. Problem
3-obj. Problem
Constrained Problem
A few Solutions
Constrained Problem
A few
Water Problem
(IEEE TEC August 2014)
33

NSGA-III on ZDT1 (2 Objectives)
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 34

NSGA-III on DTLZ2 (3 Objectives)
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
35

• 315 independently manageable paddocks, each having around 100 choices in any of 10 years • (100315)10
solutions • ~1082 atoms in the
universe
Land Use Management After 10 Years

! "sheep substantively lower; ! "dairy drastically reduced; ! "more and less frequent forest harvesting; ! "substantial increase in beef cattle.
Variation of 14 Objectives

KKT Proximity in Evolutionary Multi-objective Optimization
• As points move towards efficient front, KKTPM must reduce
• KKTPM must have similar values for points equidistant from front
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 38

KKT Optimality Conditions for MO Problems
• Find λ*,u* for minimum KKT Error:
xk is supplied
Equilibrium condition
Compl. slackness Constraint satisf.
Non-neg. of mult.
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 39

KKT Error Metric for Multi-objective Problems
• An example: • Solve: using Matlab’s fmincon()
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 40

KKT Error on P1
• KKT Error increases towards efficient front • KKT Error cannot be a metric
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 41

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
KKT Proximity Metric for MO • Scalarize MO problem using ASF formulation:
• Choose z and w • ASF(KG)=ASF(GH) • Minimize ASF finds O • Idea borrowed from MCDM literature

KKTPM (cont.)
• z: utopian point • w:
• If F is on efficient front, it is minimum ASF
• Otherwise, KKT error will not be zero
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 43

• Smoother ASF:
KKT Proximity Metric (cont.)
o Recall for 1-‐obj:
o KKTPM=εk*
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 44

KKT Proximity Metric (cont.)
o Solve and find op2mal εk*
o Define KKTPM:
1. Relax compl. slackness cond. 2. Add a penalty
Treat ASF as single-obj. problem
Use Matlab’s fmincon() to solve it • 1 linear and 1 quadratic constraints
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 45

KKT Proximity Metric on P1
• Smooth reduction to zero
o Contour parallel to PO front
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 46

ZDT1 Test Problem with NSGA-II
KKTPM Surface NSGA-II Populations N=100
• KKTPM parallel to PO front • Population converges as a front
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 47
(Zitzler, Deb and Thiele, 2000)

ZDT1 Problem (cont.) • KKTPM reduces with closeness to PO front • Correlation to distance (R=0.993)
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 48

ZDT2 Test Problem with NSGA-II
KKTPM Surface NSGA-II Populations N=100
• KKTPM parallel to PO front
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 49
(Zitzler, Deb and Thiele, 2000)
• KKTPM is computed for every ND point at every generation of NSGA-II

ZDT4 Test Problem with NSGA-II
NSGA-II Populations N=100 •" ZDT4 has multiple local
efficient fronts •" Hence more difficult to
solve •" KKTPM plots
demonstrate this aspect •" Takes 200 generations
to converge Avg g()
Avg. g()
0.4
0.6
0.8
1
0 50 100 150 200 250 300 0
50
100
150
200
250
KK
TPM
Mea
sure
Ave
rage
g()
Generation Number
0
Smallest1st Quartile
Median3rd Quartile
Largest
0.2
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 50
(Zitzler, Deb and Thiele, 2000)

DTLZ1 Problems with NSGA-III
3-obj
5-obj
10-obj
KKTPM Variations (NSGA-III)
Avg. g()
0.2
0.4
0.6
0.8
1
0 100 200 300 400 500 600 700 800 900 1000 0
50
100
150
200
250
KK
TPM
Mea
sure
Ave
rage
g()
Generation Number
Smallest1st Quartile
Median3rd Quartile
Largest
0
(Deb et al., 2002)

DTLZ2 Problems with NSGA-III KKTPM Variations (NSGA-III)
3-obj
5-obj
10-obj
Avg. g()
0.2
0.4
0.6
0.8
1
0 50 100 150 200 0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
KK
TPM
Mea
sure
Ave
rage
g()
Generation Number
Smallest1st Quartile
Median3rd Quartile
Largest
0
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
(Deb et al., 2002)

Constrained MO Problems
TNK BNH
60 80 100
1st Quartile
120 140
Median
KK
TPM
Mea
sure
Generation Number
3rd Quartile
0
0.02
Largest
0.04
0.06
0.08
0.1
0.12
0.14
0 20 40
Smallest
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 53
(Deb, 2001, Wiley Book)

Problem SRN with NSGA-II
NSGA-II convergence is poor Gen=250
Local search method is being pursued
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 54
(Deb, 2001, Wiley Book)

Problem OSY with NSGA-II
• 25% points did not converge until 250 gen. • Local search to speed up EMO runs
Local search method is being pursued
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 55
(Deb, 2001, Wiley Book)

Initial Results on Local Search Based Methods •" With and without local search
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 56
•" KKTPM identifies non-PO solutions
•" LS helps find true PO points
•
•
KKTPM allows differential treatment of ND solutions
ZDT1

Engineering Design Problems with NSGA-II
Welded Beam Design Car Side Impact Design
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 57
(Deb and Jain, 2014, NSGA-III)

KKTPM as Termination Criterion
• Set a threshold • Terminate
when it is met • Consistent
results!

Pros and Cons of KKTPM •" Advantages:
•" Guarantees convergence to theoretical optimum •" Scientific termination condition •" Address troubled areas with local search •" Applicable to classical methods as well
•" Disadvantages: •" Computationally demanding (use after every 10
generations or so) •" Discuss propose a Direct method next
•" Applicable to differentiable problems (use numerical gradients)
Advantages: • Guarantees convergence to theoretical optimum • Scientific termination condition • Address troubled areas with local search • Applicable to classical methods as well
• Disadvantages: • Computationally demanding (use after every 10
generations or so) • Discuss propose a Direct method next
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 59

A Computationally Faster Method
"" EH75$("1(6578"6571#$0%7#""" T%78"=%7%=,="5B"3$1#"6571#$0%7#")OR."
#" Q5',257"5B"0"'%7(0$"1A1#(="5B"(<,02571"
"" F01("M?"E8(7260'"#5"O5&#""" F01("U?")R%V6,'#."
#" O!8@"078"OK"(01A"#5"65=&,#("#" O!8@W"OK"W"OR"
#" O!8@W"O5&#"W"OR"
"" X12=0#(8"O(1#"N")O!8@YOK"YOR.Z["
"
" F01("U?")R%V6,'#."# O!8@ 078"OK"(01A"#5"65=&,#("# O!8@W"OK W"OR
# O!8@W"O5&# W"OR
" X12=0#(8"O(1#"N")O!8@YOK YOR.Z[
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 60

A Test Case • Single-var. problem: • x=0.5 is the optimum • x=1.0 is not an optimum
• ε* =0.3441 • εest=0.3654
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
x=1.0
ε* =0.0 εest=0.0
61

Comparison with Direct Methods
• Median KKTPM • Optimal is in
between Adjusted and Direct
• Estimated is closer
• 1.2 sec versus 62.2 sec
ZDT1
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 62
(Zitzler, Deb and Thiele, 2000)

More Comparisons on ZDT Problems
ZDT2 ZDT4
Estimated is closer to Optimal
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 63
(Zitzler, Deb and Thiele, 2000)

More Comparisons on DTLZ Problems
DTLZ1_3 DTLZ1_10
Estimated is closer to Optimal Keynote Talk at EVOLVE Conference,
Iasi, Romania, 2015 64
(Deb et al., 2002)

More Comparisons on DTLZ Problems
DTLZ2_5 DTLZ5_3
Estimated is closer to Optimal Keynote Talk at EVOLVE Conference,
Iasi, Romania, 2015 65
(Deb et al., 2002)

Constrained Bi-Objective Problems
SRN BNH
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 66
(Deb, 2001, Wiley Book)

Practical Problems
CAR WELD
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 67
(Deb and Jain, 2014, NSGA-III)

Single-Objective Constrained Optimization (Direct vs. opt.) • True optimum solution added as the final entry
g01 g07 RGA Method
True Opt. True
Opt.
RGA does not converge
RGA converges well
Stuck
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 68

More Single-Objective Constrained Optimization
g10 g18 g24
g02
g04 g08
Poor convergence Good convergence Good convergence
Good convergence Good convergence
Good convergence Easy problem
Stuck
Stuck
Stuck
RGA Method

Comput. Time
•" Approx. methods are much faster
•" Not much loss in accuracy •" Good
Trade-off
S&#>" X12=0#(8" R%$(6#"" K$5@(6#(8" !8@,1#(8"U\[>[" M>]" M>^" M>^" M>]"M[_>]" M>]" M>^" M>^" M>^"U`aa>b" ]>\" ]>\" ]>M" ]>^"U\>U" \>U" \>U" \>U" \>U"][>]" \>^" \>^" \>^" \>^"[[>b" \>U" \>U" \>U" \>U"]U>]" M>U" M>M" M>M" M>M"^[>_" M>M" M>\" M>\" M>\"^]>[" M>U" M>M" M>U" M>U"MU]>b" M>]" M>^" M>^" M>]"[\>]" \>U" \>U" \>U" \>U"UMb>U" M>U" M>U" M>U" M>["a`\>_" b>_" b>M" b>[" b>^"b`_M>`" [\>]" [\>b" [\>a" [M>\"M[^>U" \>_" \>`" \>_" \>_"M\ba>]" [>^" [>^" [>^" [>b"M``>^" M>[" M>[" M>b" M>["U\[>]" M>M" M>\" M>\" M>\"Ub^>]" M>M" M>\" M>\" M>\"b>b" \>M" \>\" \>\" \>\"
MU]M>[" a>]" a>U" a>]" a>]"aM>_" \>^" \>b" \>b" \>^"
M\ab>U" U>`" U>]" U>]" U>a"UU]>]" U>M" U>M" U>U" U>U"

Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015
Conclusions ! EMO uses stochastic search principles ! No convergence proof in finite time ! Developed performance metric for
convergence based on KKT optimality conditions
! KKT proximity metric implemented with ASF scalarization (MCDM) method
! Demonstrated to work well on many standard test and engineering problems
! Need to couple with a diversity measure ! Such studies (theory, MCDM and EMO)
should bring respect to EO and EMO fields
71

Relevant Papers • Deb, K. and Abouhawwash. M. (October, 2014). An Optimality
Theory Based Proximity Measure for Set Based Multi-Objective Optimization. COIN Report No. 2014015. (COIN Website, MSU) http://www.egr.msu.edu/~kdeb
• Deb, K., Abouhawwash, M., and Dutta, J. (2015). A KKT Proximity Measure for Evolutionary Multi-objective and Many-objective Optimization. Proceedings of Eighth Conference on Evolutionary Multi-Criterion Optimization (EMO-2015). Springer.
• Deb, K. and Abouhawwash, M. (May, 2015). A Computationally Fast and Approximate Method for Karush-Kuhn-Tucker Proximity Measure. COIN Report No. 2015015.
Keynote Talk at EVOLVE Conference, Iasi, Romania, 2015 72



























![[Kalyanmoy deb] multi-objective_optimization_using(bookos.org)](https://img.dokumen.tips/doc/110x75/558b2129d8b42a5c2e8b458b/kalyanmoy-deb-multi-objectiveoptimizationusingbookosorg.jpg)

