Embed Size (px)
Citation preview
A statistical finite element approach to nonlinear PDEs
Connor Duffin1 Edward Cripps1 Thomas Stemler1,2 Mark Girolami3,4
1Maths & Stats, UWA2Complex Systems Group, UWA
3Engineering, University of Cambridge4Alan Turing Institute
February 25, 2021
1 / 24
Motivation
I FEM is the most popular way of numerically solving PDEs, across science andengineering.
I However, no statistically coherent way of getting data into FEM simulations.
I How to combine our knowledge (FEM model/physics) with observations?
I Moreover, how to reconcile a mismatched model with observations, that isn’tinversion.
2 / 24

Talk outline
1. FEM: introducing some notation.
2. The linear statFEM construction, getting data into an FEM simulation, Poisson’sequation in 1D.
3. Extending to the nonlinear, time-dependent case, building on nonlinearstate-space modelling/DA.
4. Case study: solitons, the Korteweg-de Vries equation, and applying the filteringmethods.
3 / 24
Section 1
The statistical finite element method (statFEM)
4 / 24
FEM
I Most widely-used method of discretizing PDEs. Classic linear, steady-stateexample (Poisson equation in Rd):
−∆u = f , in Ω, u = g on ∂Ω,
u := u(x), x ∈ Ω ⊂ Rd ,
u : Ω→ R, f : Ω→ R.
I Multiply the above by testing functions v ∈ V(Ω) and integrate to give the weakform (after getting rid of BCs):∫
Ω∇u · ∇v dx =
∫Ωf · v dx .
Which we can write as the shorthand A(u, v) = 〈f , v〉.
5 / 24
FEM
Now project to finite dimensional space Vh ⊂ V, which is defined as Vh = spanφiMi=1.Note finite dimensional. Choose basis functions φi to be interpolating polynomials ofthe form uh(x) =
∑Mi=1 uiφi (x). Then the weak form gives the system
M∑i=1
ui A(φi , φj) = 〈f , φj〉 j = 1, . . . ,M.
For judicious choice of φi we get a sparse linear system which can be solved by thevarious methods available.A key advantage of FEM is that the choice of basis functions can be defined over amesh — a discretization of Ω — that can be very complex (e.g. heatsinks, turbines,engine cylinder blocks).
6 / 24
The statFEM construction
Case study: 1D Poisson equation with constant RHS, Dirichlet boundaries:1−∂2
xu = 1 + ξ
u := u(x), x ∈ [0, 1]
u(0) = u(1) = 0
We give ξ a Gaussian process prior: ξ ∼ GP(0,K ), K problem specific and can bechosen as e.g. square-exponential.This implicitly defines a probability measure over the solution space in which we arelooking at (some function space, e.g. H1
0 (Ω), under regularity conditions on ξ, e.g.ξ ∈ L2(Ω)).
1Mark Girolami et al. “The Statistical Finite Element Method (statFEM) for Coherent Synthesis ofObservation Data and Model Predictions”. en. In: Computer Methods in Applied Mechanics andEngineering 375 (Mar. 2021), p. 113533. issn: 0045-7825. doi: 10.1016/j.cma.2020.113533.
7 / 24
Deriving the prior
As with the deterministic case multiply by testing functions φj , for j = 1, . . . ,M, and
expand to give uh(x) =∑M
i=1 uiφi (x):
M∑i=1
ui A(φi , φj) = 〈f , φj〉+ 〈ξ, φj〉 j = 1, . . . ,M.
From which we can write out the associated finite-dimensional measure:
u ∼ N(
A−1f,A−1GθA−>)
where
I u = (u1, . . . , uM)> ∈ RM vector (FEM coefs).
I f = (〈f , φ1〉, . . . , 〈f , φm〉)> ∈ RM vector.
I Aij = A(φi , φj) ∈ RM×M matrix.
I Gθ,ij = 〈φi ,Kφj〉 ∈ RM×M matrix.
Note that if Gθ → 0 then the Gaussian collapses to a Dirac at the FEM solution.
8 / 24

Prior measure
0.0 0.2 0.4 0.6 0.8 1.0x
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
u
Prior
Figure: StatFEM prior: 1D Poisson example asdefined by the previous slide. Mean shown asblue line, 95% probability intervals shown asblue ribbon.
I GP introduces natural uncertaintyinside of the PDE solution.
I This uncertainty can be characterizedby the a priori chosen GP parameters.
I These parameters can be chosen torepresent physically relevantlength/space-scales.
I At one level above (choice ofcovariance function): smoothness.
9 / 24
Combining with data
Now, suppose we have observed some (noisy, possibly mismatched) data y :
y = Hu + δ + ε,
I y ∈ RN : observations.
I u ∈ RM : statFEM model, u ∼ N (mu,Cu).
I H : RM → RN : observation operator.
I δ ∼ GP(0,Kδ): systematic model bias/discrepancy/mismatch.
I ε ∼ N (0, σ2y I): observation noise.
I Assumed u ⊥ δ ⊥ ε.
10 / 24
Some basic manipulations
This gives the likelihood p(y | u):
p(y | u) = N (Hu,Kδ + σ2I).
Which can be combined with the prior p(u) to give the posterior p(u | y):
p(u | y) ∝ p(y | u)p(u).
And the marginal likelihood p(y) (marginalize over u):
p(y) = N (Hmu,HCuH> + Kδ + σ2I).
We optimize the marginal likelihood to learn the mismatch hyperparameters. Fromhere on in I’ll implicitly condition on these.
11 / 24
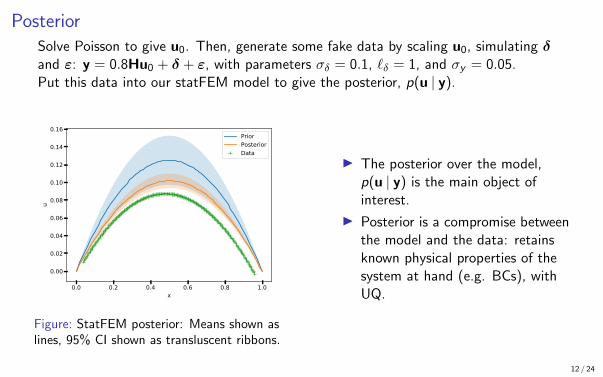
PosteriorSolve Poisson to give u0. Then, generate some fake data by scaling u0, simulating δand ε: y = 0.8Hu0 + δ + ε, with parameters σδ = 0.1, `δ = 1, and σy = 0.05.Put this data into our statFEM model to give the posterior, p(u | y).
0.0 0.2 0.4 0.6 0.8 1.0x
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
u
PriorPosteriorData
Figure: StatFEM posterior: Means shown aslines, 95% CI shown as transluscent ribbons.
I The posterior over the model,p(u | y) is the main object ofinterest.
I Posterior is a compromise betweenthe model and the data: retainsknown physical properties of thesystem at hand (e.g. BCs), withUQ.
12 / 24
Section 2
Nonlinear problems
13 / 24
Nonlinear PDEs
I Burgers equation: ut + uux − δuxx = 0 (fluid mechanics, traffic flow),
I KdV: ut + uux + uxxx = 0 (internal waves, plasma physics, integrable systems),
I Nonlinear Schrodinger: iut + 12uxx − κ |u|
2 u = 0 (optics, acoustics, integrablesystems),
I Navier-Stokes: ut + (u · ∇)u − ν∇2u = −∇w + g (fluid dynamics).
When extending to nonlinear PDEs we then have the following problems:
1. Not Gaussian anymore (discretized PDE operator no longer linear).
2. In general not available in closed form.
3. Most nonlinear systems are also time-dependent - we need to deal with this too.
So, need to build a general method for nonlinear/time-dependent PDEs that combinesour model with the data.
14 / 24
The nonlinear statFEM construction
Now: ∂tu + Lu + F(u) + ξ = 0,
u := u(x , t), ξ := ξ(x , t),
x ∈ Ω ⊂ Rd , t ∈ [0,T ],
u, ξ : Ω× [0,T ]→ R.
I L is a linear differential operator.
I F is nonlinear (possibly differential) operator.
I ξ is delta-correlated in time with spatial correlations from Kξ(x , t) ∼ N (0, δ(t − t ′)K (x , x ′)).
15 / 24
The nonlinear statFEM construction
Some notation:
I Let uh ≈∑M
i=1 ui (t)φi (x) from FEM.
I u(t) = (u1(t), . . . , uM(t))>, and un := u(n∆t) (stepsize ∆t).
I (〈ξn − ξn−1, φi 〉)Mi=1 = en−1 ∼ N (0,∆tGθ) is the discretized increments of aBrownian motion process.
This gives the evolution equation after discretizing in space with FEM and in time withimplicit/explicit Euler or Crank-Nicolson:
M(un,un−1) + en−1 = 0, n = 1, 2, . . . , nt .
16 / 24
Conditioning on data
State-space ideas
M(un,un−1) + en−1 = 0,
yn = Hnun + εn, n = 1, 2, . . . , nt .
Recalling that
I en−1 ∼ N (0,∆tGθ), model error inside the governing equations.
I εn ∼ N (0, σ2nI): observation noise.
I Assumed un ⊥ εn for each n.
Computation via extended/ensemble Kalman filter, to give p(un | y1:n) — the posteriorover the model.2
2Connor Duffin et al. “Statistical Finite Elements for Misspecified Models”. en. In: Proceedings ofthe National Academy of Sciences 118.2 (Jan. 2021). issn: 0027-8424, 1091-6490. doi:10.1073/pnas.2015006118.
17 / 24
Section 3
Internal waves: case study
18 / 24
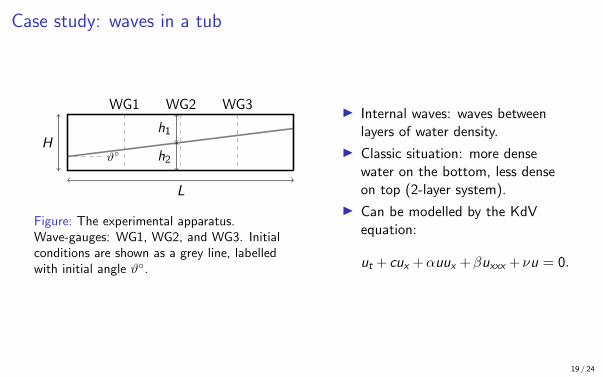
Case study: waves in a tub
WG3WG2WG1
ϑ
L
Hh2
h1
Figure: The experimental apparatus.Wave-gauges: WG1, WG2, and WG3. Initialconditions are shown as a grey line, labelledwith initial angle ϑ.
I Internal waves: waves betweenlayers of water density.
I Classic situation: more densewater on the bottom, less denseon top (2-layer system).
I Can be modelled by the KdVequation:
ut + cux +αuux +βuxxx + νu = 0.
19 / 24
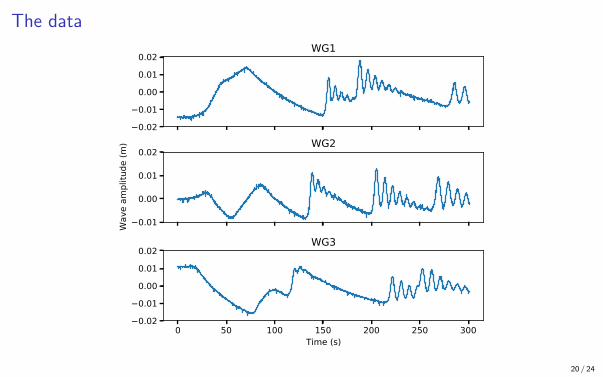
The data
0.020.010.000.010.02
WG1
0.01
0.00
0.01
0.02
Wav
e am
plitu
de (m
) WG2
0 50 100 150 200 250 300Time (s)
0.020.010.000.010.02
WG3
20 / 24

Model specificaton + setup
I Assume dynamics are modelled by the KdV equation:
ut + cux + αuux + βuxxx + νu + ξ = 0.
Solving over x ∈ [0, 6] m, t ∈ [0, 300] s.
I Discretize with FEM in space, Crank-Nicolson in time, to give base equation:
M(un,un−1) + en−1 = 0, n = 1, 2, . . . , nt .
I Data arrives every timestep
yn = Hnun + εn, n = 1, 2, . . . , nt .
I Use EnKF to compute the posterior over the model p(un | y1:n).
21 / 24

Results
0.01
0.00
0.01
A Posterior at wave gauge locationsDataeKdVPosterior
0.02
0.01
0.00
0.01
0.02
t = 75.0
B Posterior profilePosteriorData
0.005
0.000
0.005
0.010
disp
lace
men
t (m
)
0.02
0.01
0.00
0.01
t = 150.0
0 50 100 150 200 250 300t (s)
0.01
0.00
0.01
0 1 2 3 4 5 6x (m)
0.01
0.00
0.01
t = 225.0
22 / 24
Conclusions
StatFEM provides synthesis of data and FEM models: posterior p(u | y).StatFEM methodology has now been developed for linear and nonlinear PDEs.Full details see [2] for the linear case and [1] for the nonlinear extension.Code available at https://github.com/connor-duffin/statkdv-paper.
Future work
Numerical speed-ups where possible, defining the method on the Hilbert space,possibly RKHS connections.Applications to structural monitoring, reaction-diffusion systems (nonlinear oscillators),fluid mechanics.Further investigation of model mismatch — more physically meaningful alternatives toKennedy-O’Hagan?
23 / 24
References
Connor Duffin et al. “Statistical Finite Elements for Misspecified Models”. en. In:Proceedings of the National Academy of Sciences 118.2 (Jan. 2021). issn:0027-8424, 1091-6490. doi: 10.1073/pnas.2015006118.
Mark Girolami et al. “The Statistical Finite Element Method (statFEM) forCoherent Synthesis of Observation Data and Model Predictions”. en. In:Computer Methods in Applied Mechanics and Engineering 375 (Mar. 2021),p. 113533. issn: 0045-7825. doi: 10.1016/j.cma.2020.113533.
24 / 24





























