Embed Size (px)
Citation preview

6CFE01-459
2/15
Importancia visual: integración un factor paisajístico en la planificación forestal DOMINGO-SANTOS, J.M.1, FERNÁNDEZ DE VILLARÁN, R.1, CORRAL PAZOS DE PROVENS, E.1 y RAPP-ARRARÁS, Í.1 1Departamento de Ciencias Agroforestales. Escuela Politécnica Superior. Universidad de Huelva. 21819 Palos de la Frontera, Huelva. [email protected]
Resumen Entre los posibles impactos de las actuaciones forestales se encuentra el paisajístico, produci-do principalmente por las cortas (en especial a hecho y en 2-tiempos), los cortafuegos y las reforestaciones. Una manera eficaz de reducir los impactos paisajísticos es el control de su visibilidad. Como indicador de visibilidad se propone una variable de dos componentes de-nominada “Importancia visual” (IV). El primer componente de la IV se denomina “Exposi-ción visual” (EV); EV es la cuantificación en unidades de ángulo sólido del espacio que ocu-pa un objeto (o un rodal) en una vista; la EV es cuantificable mediante herramientas de SIG. El segundo componente se denomina “Frecuencia visual” (FV), que es el número de veces que es observado un objeto desde un conjunto finito y definido de puntos de observación si-tuados sobre vías de comunicación u otros puntos estratégicos; la FV también se puede obte-ner mediante SIG. La combinación de EV y FV define regiones de visualización que precisa-rán actuaciones más cuidadosas, para zonas muy visibles y desde muchos puntos, y zonas en donde el factor paisajístico condicionará menos las actuaciones forestales. Según el compo-nente que tenga mayor peso en la importancia visual se puede optar por distintos tipos de so-luciones de reducción de impacto visual. Palabras clave Cortas a hecho, visibilidad, paisaje, exposición visual, frecuencia visual 1. Introducción
La evaluación objetiva y sistemática de las características del paisaje es una cuestión clave en la investigación contemporánea sobre el paisaje (SMARDON et al., 1986). Si se atiende al conjunto de atributos utilizados para evaluar el paisaje, la visibilidad es siempre un factor fundamental en la toma de decisiones sobre evaluación de impacto visual, y también resulta básica en otras aplicaciones como la localización de yacimientos arqueológicos, de torres de vigilancia de incendios, de radares, repetidores telefónicos, etc.
En la gestión forestal la cuestión estética es un aspecto muy importante dado el valor re-
creativo de muchas zonas forestales, por lo que la fragmentación y transformación del paisaje por la realización de aprovechamientos de madera debe ser cuidadosamente planificada (BORGESA & HOGANSON, 2000). La correcta evaluación de la visibilidad de las zonas de corta y de las distintas cubiertas forestales puede ser una variable complementaria para mode-los multiobjetivo de gestión forestal (p.e., SEELY et al., 2004; SHAO et al., 2005).
La visibilidad es un parámetro obtenido en entornos 2-D de los SIG mediante la defini-
ción de cuencas visuales, sobre la base de la intervisibilidad que existe entre dos puntos cuan-do no aparecen obstáculos dentro de la línea (la visual) que los une. Además de los cálculos
3/15
geométricos hay otros factores que reducen o condicionan lo que el observador puede final-mente ver; la percepción humana es una combinación de la óptica, de los efectos atmosféri-cos, y de otros factores de índole psicológico y cultural (ERVIN & STEINITZ 2003). GROSS (1991) señala los siguientes como principales factores que influencian el impacto visual de objetos sobre el paisaje: el área que ocupa el objeto en la retina, la agudeza visual del ojo hu-mano, la extinción atmosférica, y el contraste de color con el fondo escénico.
Centrándonos en la cuestión geométrica, la resolución básica del problema de visibili-
dad tiene un planteamiento inicial de tipo binomial, esto es, un elemento del paisaje “es visto” o “no es visto” desde un determinado punto de observación; la caracterización del territorio bajo esta condición permite definir la cuenca visual del punto dado.
Sin embargo, para los elementos del paisaje que caen dentro de la categoría de “vistos”,
se debe plantear la cuestión de “¿cuánto se ven?”. Respondiendo a esta cuestión, LLOBERA (2003) define “exposición visual” como ‘una medida de la parte visible del elemento objeto de observación’. Si hablamos de celdas raster, sería la medida de lo que ocupa cada celda den-tro del campo de visión de un individuo ubicado en un punto dado.
El cálculo de la exposición visual ha sido abordado en diversos trabajos desde la apari-
ción de los sistemas de información geográfica (SIG), entre ellos resultan destacables los de TRAVIS et al. (1975) y de LLOBERA (2003), que planteaban aproximaciones a la exposi-ción visual de cada punto de una cuenca visual con carácter relativo. Más recientemente tam-bién cabe destacar el trabajo de GUERRERO Y HERNÁNDEZ (2005), aunque ha sido en el trabajo de DOMINGO et al. (2011) donde se desarrolla un algoritmo completo implementable sobre un SIG, que obtiene la exposición visual en valor absoluto, esto es, en unidades de án-gulo sólido (estereorradianes).
La medición del ángulo sólido de cada celda raster puede ser sumada para obtener la
exposición visual de un elemento determinado del paisaje constituido por varias celdas, lo cual posibilita conocer la importancia relativa de elementos concretos en la vista.
2. Objetivos
En este trabajo se presenta una metodología para caracterizar la visibilidad de los ele-
mentos del paisaje mediante un parámetro de dos componentes denominado importancia vi-sual; para ello se llevarán a cabo los siguientes pasos:
Descripción del procedimiento de obtención del primer componente de la importancia
visual, denominado exposición visual.
Descripción del segundo componente, denominado frecuencia visual.
Discretización de los dos componentes.
Obtención de la importancia visual como combinación de las clases discretas de los dos componentes.
Evaluación del parámetro importancia visual sobre el terreno.
4/15
El objeto último de este trabajo será comprobar la eficacia del parámetro definido para localizar zonas de alta visibilidad en las que las actuaciones forestales deben seguir procedi-mientos especialmente cuidadosos para la minimización de los impactos visuales.
3. Material y métodos
3.1 Obtención del primer componente: la exposición visual La justificación y metodología completa de obtención de la exposición visual queda
descrita de forma detallada en DOMINGO et al. (2011), por lo que a continuación se realiza un breve resumen de la obtención de este parámetro.
La exposición visual de un elemento de la cuadrícula territorial (píxel), para un deter-
minado punto de observación, es la superficie cubierta por el pixel sobre la retina del obser-vador evaluada en términos de ángulo sólido.
El ángulo sólido de un objeto es igual al área del casquete esférico que ocupa el objeto
proyectado sobre una esfera de radio unitario, cuyo centro está ocupado por el ojo del obser-vador. La unidad de medida del ángulo sólido es el estereorradián (sr); la esfera completa mi-de 4· sr y un plano infinito 2· sr.
El cálculo del ángulo sólido que ocupa cada celda de la cuadrícula ráster para un único
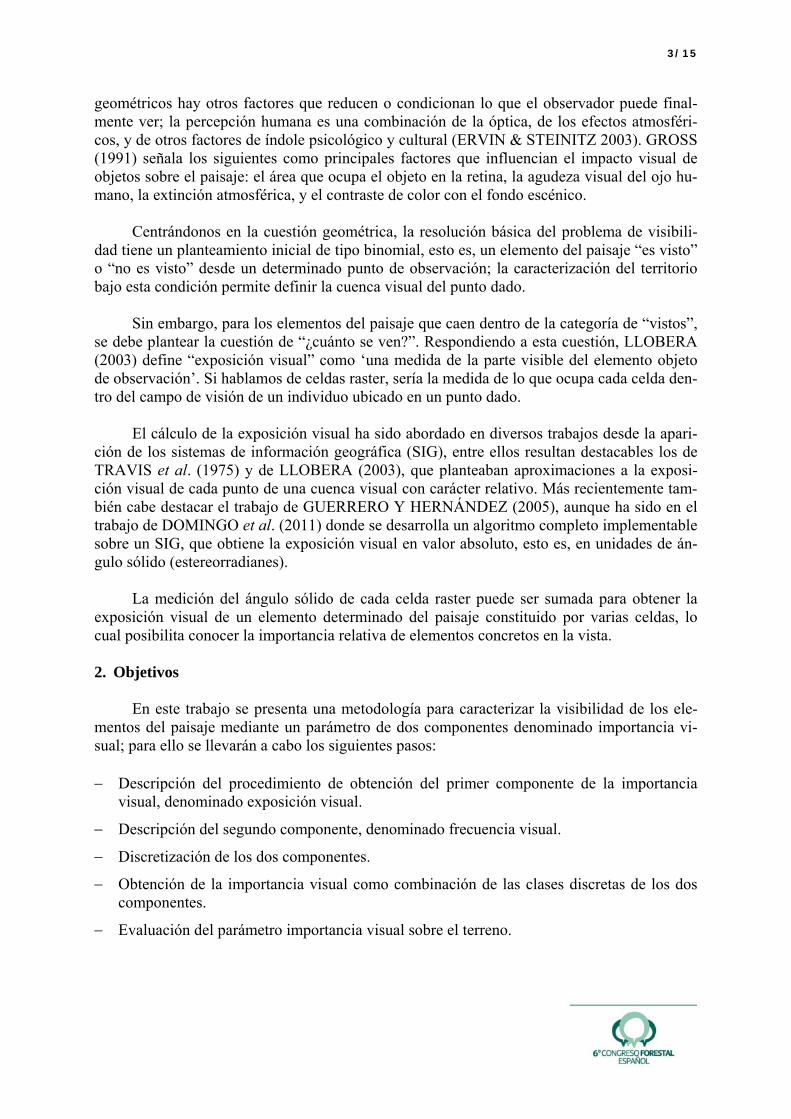
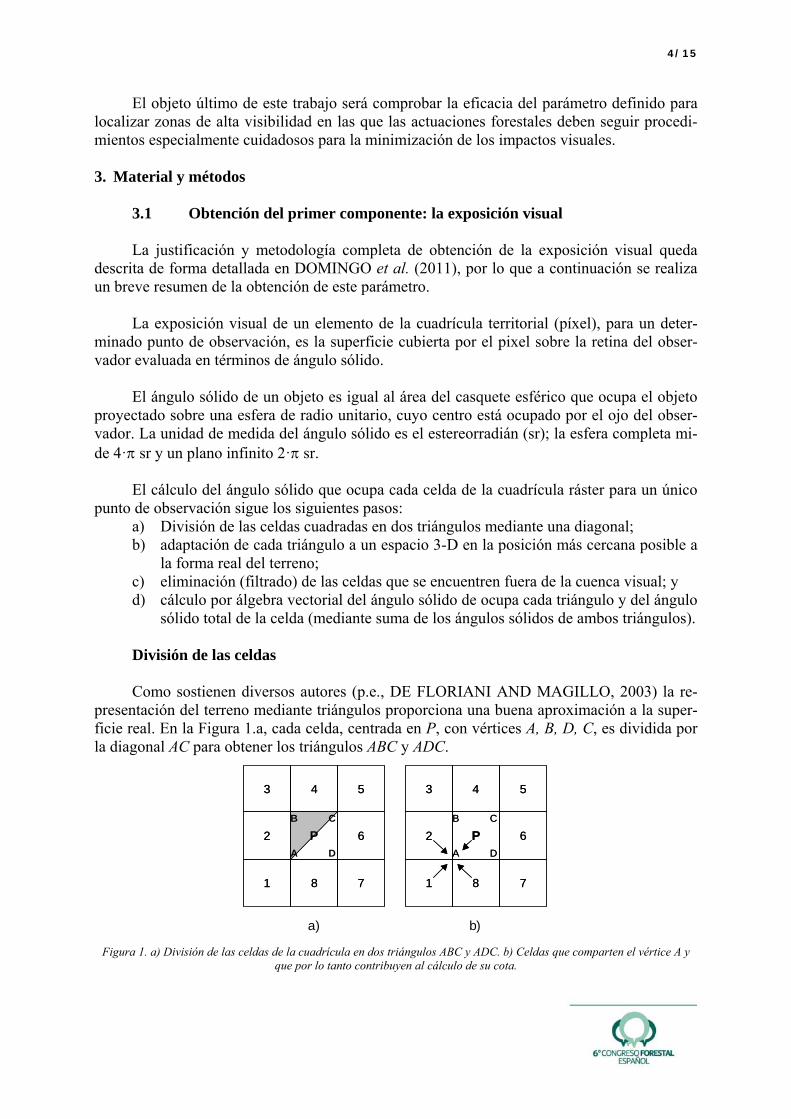
punto de observación sigue los siguientes pasos: a) División de las celdas cuadradas en dos triángulos mediante una diagonal; b) adaptación de cada triángulo a un espacio 3-D en la posición más cercana posible a
la forma real del terreno; c) eliminación (filtrado) de las celdas que se encuentren fuera de la cuenca visual; y d) cálculo por álgebra vectorial del ángulo sólido de ocupa cada triángulo y del ángulo
sólido total de la celda (mediante suma de los ángulos sólidos de ambos triángulos). División de las celdas Como sostienen diversos autores (p.e., DE FLORIANI AND MAGILLO, 2003) la re-
presentación del terreno mediante triángulos proporciona una buena aproximación a la super-ficie real. En la Figura 1.a, cada celda, centrada en P, con vértices A, B, D, C, es dividida por la diagonal AC para obtener los triángulos ABC y ADC.
3 4 5
2 P 6
1 8 7
A
B C
D
3 4 5
2 P 6
1 8 7
A
B C
D
3 4 5
2 P 6
1 8 7
A
B C
D
3 4 5
2 P 6
1 8 7
A
B C
D
a) b) Figura 1. a) División de las celdas de la cuadrícula en dos triángulos ABC y ADC. b) Celdas que comparten el vértice A y
que por lo tanto contribuyen al cálculo de su cota.
5/15
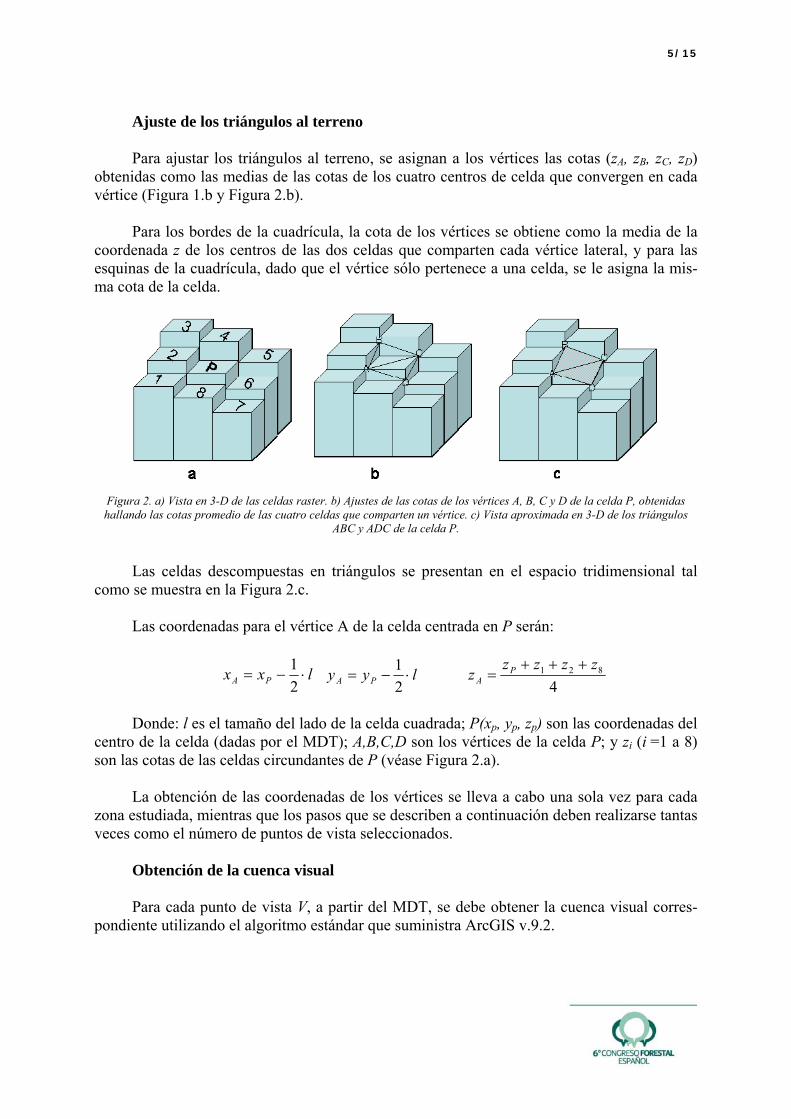
Ajuste de los triángulos al terreno Para ajustar los triángulos al terreno, se asignan a los vértices las cotas (zA, zB, zC, zD)
obtenidas como las medias de las cotas de los cuatro centros de celda que convergen en cada vértice (Figura 1.b y Figura 2.b).
Para los bordes de la cuadrícula, la cota de los vértices se obtiene como la media de la
coordenada z de los centros de las dos celdas que comparten cada vértice lateral, y para las esquinas de la cuadrícula, dado que el vértice sólo pertenece a una celda, se le asigna la mis-ma cota de la celda.
Figura 2. a) Vista en 3-D de las celdas raster. b) Ajustes de las cotas de los vértices A, B, C y D de la celda P, obtenidas hallando las cotas promedio de las cuatro celdas que comparten un vértice. c) Vista aproximada en 3-D de los triángulos
ABC y ADC de la celda P.
Las celdas descompuestas en triángulos se presentan en el espacio tridimensional tal
como se muestra en la Figura 2.c. Las coordenadas para el vértice A de la celda centrada en P serán:
lxx PA 2
1 lyy PA
2
1
4821 zzzz
z PA
Donde: l es el tamaño del lado de la celda cuadrada; P(xp, yp, zp) son las coordenadas del
centro de la celda (dadas por el MDT); A,B,C,D son los vértices de la celda P; y zi (i =1 a 8) son las cotas de las celdas circundantes de P (véase Figura 2.a).
La obtención de las coordenadas de los vértices se lleva a cabo una sola vez para cada
zona estudiada, mientras que los pasos que se describen a continuación deben realizarse tantas veces como el número de puntos de vista seleccionados.
Obtención de la cuenca visual Para cada punto de vista V, a partir del MDT, se debe obtener la cuenca visual corres-
pondiente utilizando el algoritmo estándar que suministra ArcGIS v.9.2.

6/15
Cálculo del ángulo sólido para cada celda visible El cálculo del ángulo sólido de cada triángulo visto desde el punto V es realizado me-
diante el algoritmo de VAN OOSTEROM & STRACKEE (1983):
abcabc b·ca·ca·b
cba
12
1tan
adcadc d·ca·ca·d
cda
22
1tan
Donde: Ω1 y Ω2 designan respectivamente los ángulos sólidos de los triángulos ABC y
ADC (véase Figura 3); a, b, c, y d son los vectores de posición de los vértices A, B, C, y D tomando V como origen de coordenadas (esto es, los vectores VA, VB, VC, y VD); cba y
cda simbolizan el determinante de la matriz que resulta de escribir las coordenadas de cada
vector por filas; a, b, c, y d son los módulos de cada vector (distancia del origen al punto); y (a·b) indica el producto escalar (de los vectores a y b, y sucesivos).
En función de la posición de los triángulos ABC y ADC, los valores de Ω1 y Ω2 pueden
ser positivos o negativos, por lo cual, para obtener el valor del ángulo sólido total, se deben tomar valores absolutos:
Ω = |Ω1| + |Ω2|
Donde Ω es el ángulo sólido de la celda en estereoradianes (sr). Teniendo en cuenta que
hipotéticamente sería posible que el valor de ½ Ω1 o el de ½ Ω2 pudiera ser mayor que π/2, la función que se tomará para obtener la inversa de la tangente debe ser “atan2”.
Con los valores de Ω de cada celda se genera una nueva cuadrícula raster del mismo
tamaño que el MDT, que será el mapa de exposición visual desde el punto V.
C
V
ac
d
b
A
D
B
Figura 3. Ángulos sólidos Ω1 y Ω2 respecto del punto V generados por las superficies triangulares BAC y BDC de la celda
raster
7/15
3.2 Obtención del segundo componente: frecuencia visual La obtención de la frecuencia visual se desarrolla en dos pasos: Establecimiento de puntos de observación sistemática sobre vías de comunicación
Cálculo de mapas raster de frecuencia de visualización (VFr)
Sobre vías de comunicación y otras zonas estratégicas para la observación del paisaje,
se establece una red sistemática de puntos de observación. Para cada uno de estos puntos se determina la cuenca visual.
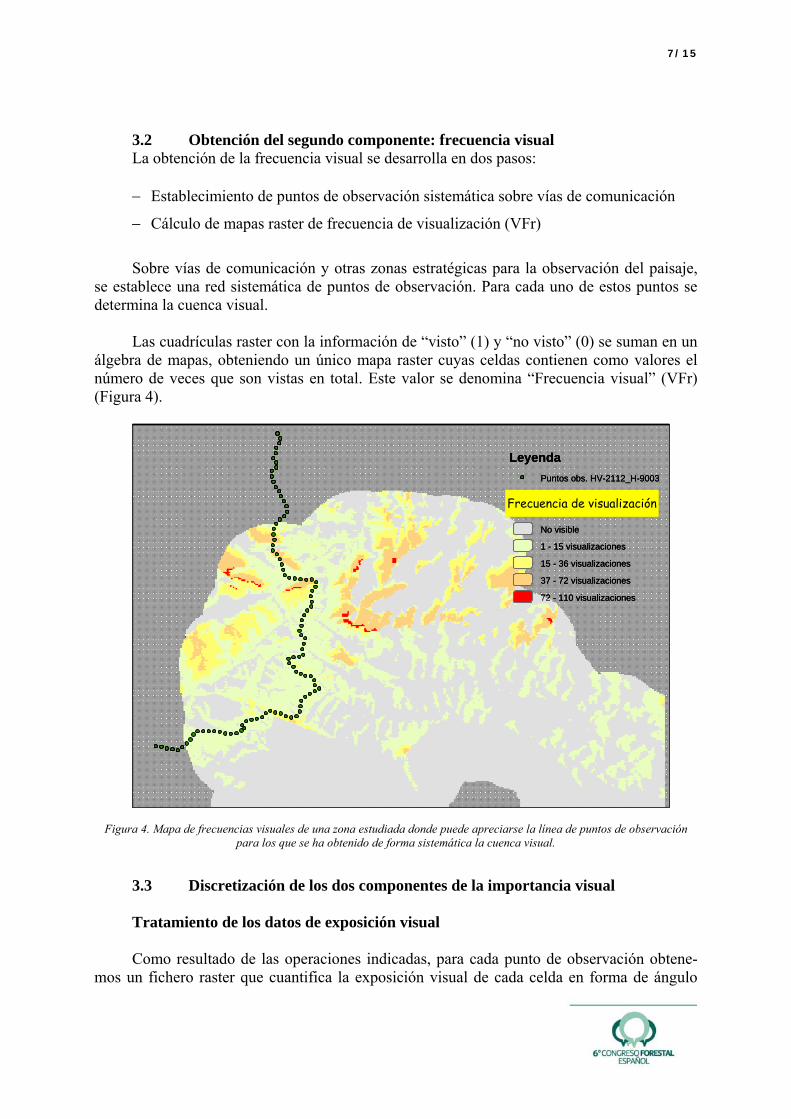
Las cuadrículas raster con la información de “visto” (1) y “no visto” (0) se suman en un
álgebra de mapas, obteniendo un único mapa raster cuyas celdas contienen como valores el número de veces que son vistas en total. Este valor se denomina “Frecuencia visual” (VFr) (Figura 4).
Leyenda
Puntos obs. HV-2112_H-9003
Cvis_Rosal01Intensidad visual
No visible
1 - 15 visualizaciones
15 - 36 visualizaciones
37 - 72 visualizaciones
72 - 110 visualizaciones
Frecuencia de visualización
Leyenda
Puntos obs. HV-2112_H-9003
Cvis_Rosal01Intensidad visual
No visible
1 - 15 visualizaciones
15 - 36 visualizaciones
37 - 72 visualizaciones
72 - 110 visualizaciones
Leyenda
Puntos obs. HV-2112_H-9003
Cvis_Rosal01Intensidad visual
No visible
1 - 15 visualizaciones
15 - 36 visualizaciones
37 - 72 visualizaciones
72 - 110 visualizaciones
Frecuencia de visualización
Figura 4. Mapa de frecuencias visuales de una zona estudiada donde puede apreciarse la línea de puntos de observación
para los que se ha obtenido de forma sistemática la cuenca visual.
3.3 Discretización de los dos componentes de la importancia visual Tratamiento de los datos de exposición visual Como resultado de las operaciones indicadas, para cada punto de observación obtene-
mos un fichero raster que cuantifica la exposición visual de cada celda en forma de ángulo

8/15
sólido. Si necesitamos trabajar con múltiples puntos de observación (p.e., carreteras, pistas, áreas urbanas), el conjunto de mapas raster que se obtenga puede sumarse utilizando la he-rramienta de álgebra de mapas, para obtener un mapa acumulativo (WHEATLEY, 1995; LLOBERA, 2003) de la exposición visual para los puntos de observación designados.
Un cambio de escala de los valores de exposición visual puede ser útil para la visualiza-
ción de los resultados, a causa del amplio rango de valores que se pueden presentar; suelen aparecer valores de décimas o centésimas de estereorradián para un pequeño número de cel-das, mientras que para el resto la exposición visual da valores muy pequeños, con lo que la visualización con el SIG es de muy mala calidad. Pare mejorar esta cuestión, proponemos sustituir el valor de la exposición visual por la siguiente función de logaritmo inverso:
2log
1entonces2,0si
1entonces2,0si
EVn
Donde EVn es el valor transformado de la exposición visual acumulada. Los valores de EVn variarán entre 0,1 y 1; pueden aparecer valores de Ω por encima de
0, 2π en la celda correspondiente al punto de observación o las adyacentes, en las cuales la exposición visual es obviamente muy alta, por lo que el truncado que aplica la transformación de escala no tiene incidencia práctica.
Cuando esta transformación se aplica a la suma de las capas de exposición visual obte-
nidas para un conjunto múltiple de puntos, denominaremos a la variable EVacn
Este conjunto de procesos, tanto para uno como para múltiples puntos de observación,
han sido programados en una herramienta de ArcGIS 9.2 denominada “Visual Exposure”.
9/15
Exposición visual
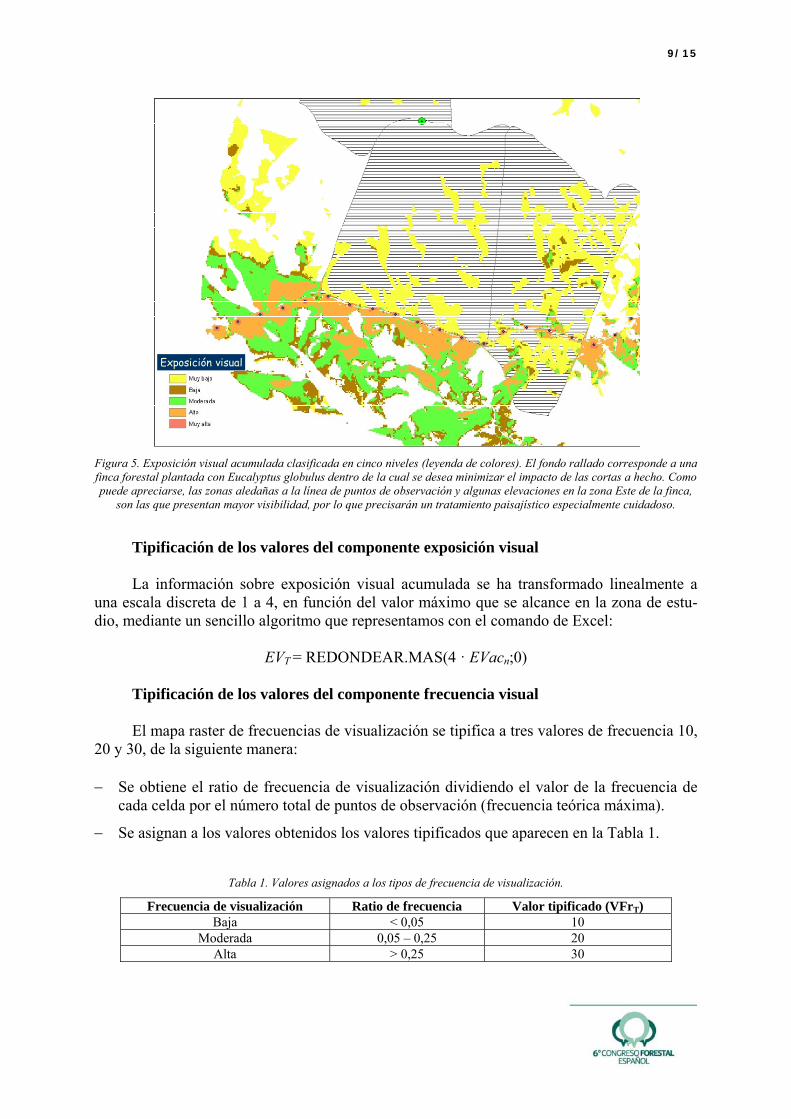
Figura 5. Exposición visual acumulada clasificada en cinco niveles (leyenda de colores). El fondo rallado corresponde a una finca forestal plantada con Eucalyptus globulus dentro de la cual se desea minimizar el impacto de las cortas a hecho. Como puede apreciarse, las zonas aledañas a la línea de puntos de observación y algunas elevaciones en la zona Este de la finca,
son las que presentan mayor visibilidad, por lo que precisarán un tratamiento paisajístico especialmente cuidadoso.
Tipificación de los valores del componente exposición visual La información sobre exposición visual acumulada se ha transformado linealmente a
una escala discreta de 1 a 4, en función del valor máximo que se alcance en la zona de estu-dio, mediante un sencillo algoritmo que representamos con el comando de Excel:
EVT = REDONDEAR.MAS(4 · EVacn;0)
Tipificación de los valores del componente frecuencia visual El mapa raster de frecuencias de visualización se tipifica a tres valores de frecuencia 10,
20 y 30, de la siguiente manera:
Se obtiene el ratio de frecuencia de visualización dividiendo el valor de la frecuencia de cada celda por el número total de puntos de observación (frecuencia teórica máxima).
Se asignan a los valores obtenidos los valores tipificados que aparecen en la Tabla 1.
Tabla 1. Valores asignados a los tipos de frecuencia de visualización.
Frecuencia de visualización Ratio de frecuencia Valor tipificado (VFrT)
Baja < 0,05 10 Moderada 0,05 – 0,25 20
Alta > 0,25 30
10/15
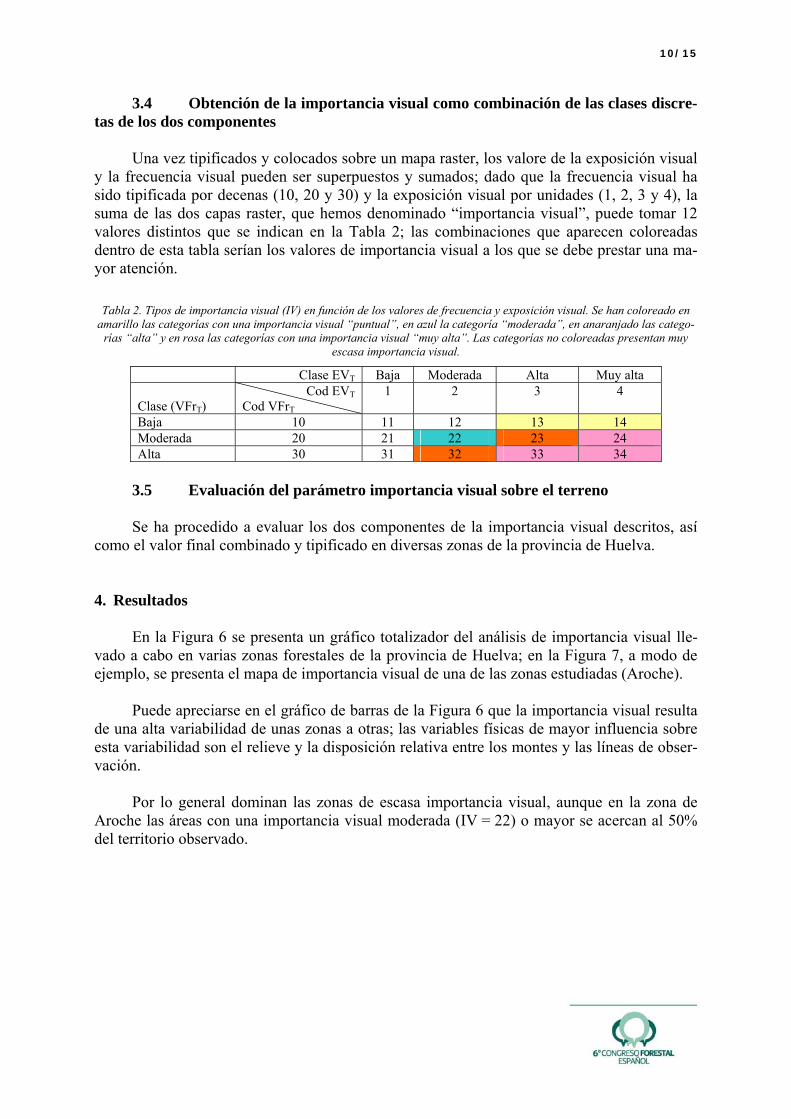
3.4 Obtención de la importancia visual como combinación de las clases discre-tas de los dos componentes
Una vez tipificados y colocados sobre un mapa raster, los valore de la exposición visual
y la frecuencia visual pueden ser superpuestos y sumados; dado que la frecuencia visual ha sido tipificada por decenas (10, 20 y 30) y la exposición visual por unidades (1, 2, 3 y 4), la suma de las dos capas raster, que hemos denominado “importancia visual”, puede tomar 12 valores distintos que se indican en la Tabla 2; las combinaciones que aparecen coloreadas dentro de esta tabla serían los valores de importancia visual a los que se debe prestar una ma-yor atención.
Tabla 2. Tipos de importancia visual (IV) en función de los valores de frecuencia y exposición visual. Se han coloreado en amarillo las categorías con una importancia visual “puntual”, en azul la categoría “moderada”, en anaranjado las catego-
rías “alta” y en rosa las categorías con una importancia visual “muy alta”. Las categorías no coloreadas presentan muy escasa importancia visual.
Clase EVT Baja Moderada Alta Muy alta Clase (VFrT)
Cod EVT Cod VFrT
1 2 3 4
Baja 10 11 12 13 14 Moderada 20 21 22 23 24 Alta 30 31 32 33 34
3.5 Evaluación del parámetro importancia visual sobre el terreno Se ha procedido a evaluar los dos componentes de la importancia visual descritos, así
como el valor final combinado y tipificado en diversas zonas de la provincia de Huelva.
4. Resultados En la Figura 6 se presenta un gráfico totalizador del análisis de importancia visual lle-
vado a cabo en varias zonas forestales de la provincia de Huelva; en la Figura 7, a modo de ejemplo, se presenta el mapa de importancia visual de una de las zonas estudiadas (Aroche).
Puede apreciarse en el gráfico de barras de la Figura 6 que la importancia visual resulta
de una alta variabilidad de unas zonas a otras; las variables físicas de mayor influencia sobre esta variabilidad son el relieve y la disposición relativa entre los montes y las líneas de obser-vación.
Por lo general dominan las zonas de escasa importancia visual, aunque en la zona de
Aroche las áreas con una importancia visual moderada (IV = 22) o mayor se acercan al 50% del territorio observado.

11/15
0
20
40
60
80
100
120
Aracena1 Aracena2 Aroche
Suma de % s/visible
LaPalma1 LaPalma2 Patras Rosal Tharsis Valverde Zalamea
3433323124232221141312110
Zona
Import_visual
Figura 6. Composición porcentual de las zonas de estudio en cuanto a su importancia visual tipificada.
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!!
! !!!
!
!
!! !
!
! ! ! ! ! ! ! !! ! ! ! ! ! ! !
!
!! ! !
!! !
!!
!!
!!
! ! ! ! !!
! ! !
!
!! !
!
!
!
!! !
!
N-433
HV-2112
494
492
Importancia visual
0
11
12
13
14
21
22
23
24
31
32
33
34
Figura 7. Mapa de importancia visual tipificada para una masa forestal de Eucalyptus globulus (recintos encerrados me-
diante líneas negras) cercana a la población de Aroche (Huelva). El valor 0 corresponde a zonas no visibles desde los pun-tos de observación.

12/15
En todas las zonas de observación hay una pequeña parte de la superficie, aproximada-
mente entre el 5 y el 15% del total, de áreas de importancia visual alta o muy alta. El funcionamiento de los algoritmos es satisfactorio, aunque los tiempos de cálculo
computacional para el parámetro “exposición visual” oscilan entre 1 y 10 horas, en función de la superficie total de la zona estudiada y de la distancia que se establezca entre puntos de ob-servación; se consideró que la distancia de 200 m entre puntos proporciona una aceptable eva-luación de la visibilidad y un tiempo de cálculo asumible.
5. Discusión
El interés de la evaluación de la exposición visual ya fue puesto de manifiesto por los
autores del presente trabajo en DOMINGO et al. (2011), mientras que el interés de los mapas de frecuencia visual acumulada ha sido analizado por diversos autores (p.e. WHEATLEY, 1995; BISHOP, 2003). El parámetro “importancia visual” trata de evaluar de forma conjunta los dos componentes de la visibilidad señalados.
Los resultados obtenidos indican que en general la proporción de terreno que debe ser
gestionada con un cuidado especial, desde el punto de vista visual, es pequeña, inferior al 15%. Sobre estas áreas se debería llevar a cabo un espaciamiento temporal de las cortas a he-cho, para evitar la generación de grandes manchas descubiertas muy visibles.
El contraste sobre el terreno de los resultados obtenidos con el uso del SIG ha sido
bueno en general; únicamente en las zonas muy cercanas a los puntos de observación los re-sultados son menos fiables por varias causas:
Las imprecisiones de los modelos digitales del terreno se manifiestan de forma más noto-
ria mientras más cercana sea la observación.
La importancia visual de zonas cercanas a la vía de comunicación, pero algo alejadas de los puntos de observación (equidistantes 200 m) puede verse infravalorada, aunque se tra-ta siempre de situaciones puntuales.
La vegetación ejerce efecto de pantalla sobre las vistas, especialmente las de los planos medios, por lo que los modelos de elevación del terreno deberían ser corregidos con la al-tura de la vegetación; en el presente trabajo las correcciones de las pantallas vegetales han sido estimadas utilizando la capa cartográfica de coberturas y usos del suelo (C.M.A., 2007). El uso de datos de elevación del terreno de alta precisión obtenidos mediante tec-nología LiDAR (KRAUS & PFEIFER, 1998) proporciona valores muy precisos de la altu-ra del arbolado (p.e., ZIMBLE et al., 2003). En consecuencia, cuando los datos de LiDAR se encuentren fácilmente accesibles, resultará sencilla la obtención de MDT que incorpo-ren los objetos opacos sobre el terreno, para una evaluación precisa de la visibilidad.
Los rangos de valores que se han utilizado para la tipificación de los dos componentes de la importancia visual se han establecido de forma aproximada; probablemente en otras áreas de estudio sea preciso revisar estos intervalos. Los resultados podrían mejorar también realizando jerarquizaciones basadas en lógica difusa, que eviten fronteras artificiales entre valores cercanos de importancia visual.
13/15
Aunque el parámetro ha sido concebido para actuaciones forestales principalmente, puede aplicarse a la minimización de impactos visuales de otros proyectos, siempre que no contengan la construcción de estructuras verticales (edificios, torres de energía, etc.), puesto que estos elementos no quedan correctamente representados en los modelos digitales del te-rreno.
6. Conclusiones
La importancia visual es un parámetro que jerarquiza la visibilidad de cada píxel de una
cuadrícula raster, teniendo en cuenta el espacio que ocupan en la escena (exposición visual) y el número de veces que puede observarse (frecuencia visual). En el presente trabajo se descri-be una metodología apoyada en herramientas SIG para la evaluación de la importancia visual.
Entre las principales limitaciones de la herramienta se encuentran los valores que ofrece
para las zonas colindantes con los puntos de observación. Se considera que la mayor objetivi-dad se consigue para escenas situadas en el plano medio, tal como las define HIGUCHI (1983), que pueden encontrarse entre los 140 y los 6000 m de distancia. Los impactos visua-les en el plano cercano, constituido por la franja que se dispone a lo largo de la vía de comu-nicación (línea de puntos de observación), son, por regla general, evidentes y no precisan su localización por medios sofisticados.
La vegetación y otros posibles obstáculos del terreno no presentes en el MDT pueden
modificar notablemente los contornos de la cuenca visual deben ser incorporados a éste; la precisión de la metodología de incorporación de esta información puede influir notablemente sobre los resultados finales. Esta incorporación es importante pues la vegetación es una de las herramientas de reducción de impactos visuales, por su efecto de pantalla.
Consideramos que la metodología planteada y plasmada en el parámetro importancia vi-
sual resultará útil para la planificación de actuaciones forestales y otros proyectos que impli-quen modificaciones sobre el paisaje, indicando las zonas que pueden generar mayores de impactos visuales, con el objetivo de su reducción. La capa cartográfica de la importancia visual puede ser incluida con facilidad en los modelos de gestión forestal multicriterio, para la disminución del potencial impacto visual de los aprovechamientos, diseño de repoblaciones, mejora del hábitat, usos turísticos, etc.
7. Bibliografía BISHOP, I.D.; 2003. Assessment of visual qualities, impacts, and behaviours, in the land-scape, by using measures of visibility. Environ Plann B Plann Des. 30(5), 677 – 688. BORGESA, J.G.; HOGANSON, H.M.; 2000. Structuring a landscape by forestland classifica-tion and harvest scheduling spatial constraints. For.Ecol.Manage 5/1 130(1-3) 269 – 275. C.M.A. Consejería de Medio Ambiente, 2007. Sistema de Información Ambiental de Andalu-cía: Usos y coberturas vegetales del suelo 2007 E. 1:50.000. Consejería de Medio Ambiente. Junta de Andalucía. Mapa en formato digital. DE FLORIANI, L.; MAGILLO, P.; 2003. Algorithms for visibility computation on terrains: A survey. Environ Plann B Plann Des. 30(5) 709 – 728.

14/15
DOMINGO-SANTOS, J.M.; FERNÁNDEZ DE VILLARÁN, R.; RAPP-ARRARÁS, Í.; CORRAL, E.; 2011. The visual exposure in forest and rural landscapes: an algorithm and a GIS tool. Landscape and Urban Planning101(1) 52 – 58. ERVIN, S.; STEINITZ, C.; 2003. Landscape visibility computation: Necessary, but not suffi-cient. Environ Plann B Plann Des 30(5) 757 – 766. GROSS, M.; 1991. The Analysis Of Visibility—Environmental Interactions Between Com-puter Graphics, Physics, and Physiology. Comput. & Graphics Vol. 15 No. 3 407 – 415. GUERRERO, J.J.; HERNÁNDEZ, M.; 2005. Metodología aplicada para el estudio y evalua-ción de la calidad visual del paisaje. Actas de ponencias del IV Congreso Forestal Español de Zaragoza. Nº 493. 8pp. HIGUCHI, T.; 1983. The Visual and Spatial Structure of Landscapes. MIT Press. Cambridge, Massachusetts. KRAUS, K.; PFEIFER, N.; 1998. Determination of Terrain Models in Wooded Areas with Airborne Laser Scanner Data. ISPRS-Journal of Photogrammetry and Remote Sensing 53 193-203. LLOBERA M.; 2003. Extending GIS-based visual analysis: the concept of visualscapes. Int J Geogr Inf Sci.17(1) 25 – 48. SEELY, B.; NELSON, J.; WELLS, R.; PETER, B.; MEITNER, M.; ANDERSON, A.; HARSHAW, H.; SHEPPARD, S.; BUNNELL, F.; KIMMINS, K.; HARRISON, D.; 2004. The application of a hierarchical, decision-support system to evaluate multi-objective forest management strategies: a case study in northeastern British Columbia, Canada. For.Ecol.Manage 10/11 199(2-3) 283 – 305. SHAO, G.; WANG, H.; DAI, L.; WU, G.; LI, Y.; LANG, R.; SONG, B.; 2005. Integrating stand and landscape decisions for multi-purposes of forest harvesting. For.Ecol.Manage 3/7 207(1-2) 233 – 243. SMARDON, R.C.; PALMER, J.F.; FELLEMAN, J.P.; 1986. Foundations for Visual Project Analysis. John Wiley & Sons. New York. TRAVIS, M.R.; ELSNER, G.H.; IVERSON, W.D.; JOHNSON, C.G.; 1975. VIEWIT : com-putation of seen areas, slope, and aspect for land-use planning. General Technical Report PSW-11/1975. USDA, Forestry Service. Berkeley California. VAN OOSTEROM, A.; STRACKEE, J.; 1983. The Solid Angle of a Plane Triangle. IEEE Trans. Biom. Eng. BME-30 (2) 125 - 126. doi:10.1109/TBME.1983.325207. WHEATLEY, D.; 1995. Cumulative viewshed analysis: A GIS-based method for investigat-ing intervisibility and its archaeological application, en: Lock, G., Stancic, Z. (Eds.), Archae-ology and Geographical Information Systems: A European Perspective. Taylor & Francis, London, pp. 171 – 185.

15/15
ZIMBLE, D.A.; EVANS, D.L.; CARLSON, G.C.; PARKER, R.C.; GRADO, S.C.; GERARD, P.D.; 2003. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 10/15 87(2-3), 171 - 182. DOI: 10.1016/S0034-4257(03)00139-1.