Embed Size (px)
Citation preview

12
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
A three-stage ruttingmodel utilising ruttingperformance data from theHamburg Wheel-TrackingDevice (WTD)Ghazi Al-Khateeb and Imad Basheer
Refereed PaperThis paper has been critically reviewed by at leasttwo recognised experts in the field.
Originally submitted: August 2008.
AbstractRutting, or permanent deformation, is known tooccur in hot-mix asphalt (HMA) pavements. Higherrut rate typically occurs at pavement temperatureshigher than 40°C. Heavy traffic loadings are theleading cause for permanent deformation in HMApavements in hot climates. Rutting performance ofHMA pavements is simulated in laboratory usingdifferent procedures, techniques and devices. Oneof the devices used to measure rutting performancein laboratory is the Hamburg Wheel-TrackingDevice (WTD). Rutting test using the Hamburg WTDcan be conducted under dry or wet conditions. Indry conditions, the rut depth is measured to evaluateHMA rutting, whereas, in wet conditions, wherethe specimen is submerged into water, the combinedeffect of rutting and moisture damage is evaluated.Permanent deformation (εp) or rut depth (RD) istypically plotted against the number of wheel passesor cycles (N) of a pre-specified wheel load duringthe test. In this paper, a new rutting model to fitlaboratory rutting performance data obtained fromthe Hamburg WTD test is presented. The new ruttingmodel developed in this paper is a three-stage modelthat describes the three different phases of HMArutting normally occurring during the rutting test:consolidation (or primary stage), permanentdeformation (or secondary stage), and flow (ortertiary) stage. A polynomial of the third order wasthe basis of such model. The constants of thepolynomial model were then related to the asphaltbinder properties. The asphalt binder propertieswhere found to exhibit high correlation with theSuperpave rutting parameter (G*/sin δ). The modelwas expressed in terms of the asphalt binderproperty and load cycles. Given the asphalt binder(G*/sin δ), the model may be used to evaluate therutting performance of HMA pavements andidentify the three different stages of rutting.

13
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
BACKGROUNDPermanent deformation of hot mix asphalt (HMA),commonly known as rutting, has a major impact onflexible pavement performance. Rutting contributesprimarily to poor ride quality and driving hazardmanifested by increased potential of hydroplaningand steering difficulty. Rut-resistant HMA isdesirable for extending pavement service life. Inorder to achieve such a desirable characteristic,proper understanding of the mechanism is vital,along with identifying the factors that havepronounced effects on the initiation and progressionof rutting.
Rutting in HMA pavements develops gradually inthe wheel path with increasing number of trafficload repetitions. It occurs as a result of densificationof the HMA material (by decreasing its volume),which primarily occurs at the initial stages oftrafficking, and by shear deformation withoutvolume change (displacement with volumeconstancy), which predominantly takes place at alater stage. Shear deformation usually results inupheaval zones near the sides of wheel paths aftercompaction of material under tyres has beencompleted. Many research studies have shown thatshear deformation is the primary rutting mechanism(Eisenmann and Hilmer 1987) and can last for thegreater part of the lifetime of the pavement (Sousa,Craus and Monismith 1991). The propensity of ahot mix asphalt material to permanent deformationis influenced by myriad parameters that can beclassified into four categories (Sousa et al. 1991):aggregate characteristics, binder properties, mixturevolumetric properties, and environmental oroperating conditions. Table 1 is adapted from Sousaet al. (1991) and provides a summary of the variousparameters that have an impact on HMA rutting.The effects of increasing or decreasing theseparameters on rutting propensity of a typical HMApavement are also summarised in Table 1.
In the last three decades, many efforts were made todevelop models for predicting HMA rutting inasphalt pavements. Two general types of modelswere developed: one type determines the number ofrepetitions of a given load to achieve a certain levelof rut depth, and the other enables prediction of rutdepth from the number of loading cycles. A numberof models used the elastic-layer theory to computethe elastic strain in the HMA layer that is used indetermining the number of repetitions to reach apre-assigned level of rutting. The earliest of thesestudies was conducted by Claessen et al. (1977).Other models use a quasi-elastic approach in which
the elastic-layer theory is used to predict a non-elastic response (e.g. plastic strain) that isresponsible for rutting. In other words, the plasticstrain is assumed to be functionally proportional tothe elastic strain (which can be easily determinedusing elastic-layer theory) and number of loadrepetitions (e.g. McLean 1973; Monismith 1976).More recent efforts utilising this approach are theVESYS model (Kenis 1978), MEPDG (NCHRP 2004)and the WesTrack model (Epps et al. 2002, p. ).Nonlinear viscoelastic methods have also been usedto model HMA rutting; however, they proved to becomputationally prohibitive and require a largeamount of laboratory work to establish appropriatenonlinear, time-dependent constitutiverelationships (Thrower 1977; Nunn 1986; Sousa etal. 1991). Recent efforts at Delft University to modelasphalt rutting used a plasticity constitutive modelborrowed from geotechnical applications (Desai,Somasundaram and Frantziskonis 1986) to modelrutting of HMA by describing the behaviour of boththe total asphalt mixture and the aggregate skeleton(Medani 2006; Muraya 2007). Empirical modelsthat predict the progression of rutting depth withload repetitions have also been developed. Theseinclude the three-stage model by Zhou, Scullionand Sun (2004), which is explained in more detailin the modelling section of this paper. A newerempirical model has also been developed at theUniversity of Auckland by Henning et al. (2006,2009) in which rutting of HMA is assumed to followa three-step approach, starting with initialdensification, followed by rutting progressionduring the stable rut stage, and then initiation ofaccelerated rut progression. For strong pavements,Henning et al. (2006, 2009) found that rutting occursin only two stages: initial densification andprogression. Both the New Zealand Long TermPavement Performance (LTPP) and the CanterburyAccelerated Pavement Testing Indoor Facility(CAPTIF) data were used to derive simplified modelsfor the various stages that can be used at networklevel. The initial densification rutting wasmathematically related to the structural number ofthe pavement determined using a falling weightdeflectometer, and the accelerated rutting wasrelated to structural number and loading cycles.
The primary objective of this paper is to examine theaccuracy of a simple mathematical model to simulatethe rutting behaviour of various HMA mixturestested with the use of the Hamburg Wheel-TrackingDevice (WTD). Additionally, the paper examinesthe relationship between mixture properties andmodel parameters.

14
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
LABORATORY EVALUATIONIn the laboratory, the rutting performance of HMAmixtures can be evaluated using different devicesand procedures including the Hamburg WTDmethod, the French rutting test, the repeated shearat constant height (RSCH) test in the SuperpaveShear Tester (SST), the frequency sweep at constantheight (FSCH) test in the SST, and the flow numbertest in the Simple Performance Tester (SPT).
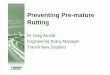
In this paper, the Hamburg WTD was used to testHMA mixtures against rutting. The Hamburg WTDis one of the performance test devices used toevaluate asphalt paving mixtures for combinedrutting and moisture damage. The Hamburg WTDapplies a vertical load of 650 N on two compactedslabs submerged under water at high temperaturesas shown in Figure 1. The device uses two steelwheels of 203.5 mm in diameter and 47 mm in widthto apply the vertical load. Each slab is320 ´ 260 ´ 80 mm in dimensions. Typically rutdepths at 10 000 and 20 000 wheel passes arerecorded. The number of wheel passes at 10 mm rutdepth is also recorded. Visual stripping evaluationof the tested slabs is normally done to check for anymoisture damage in the asphalt mixture.
Performance results from the Hamburg WTD wereshown to have some correlation with field pavementperformance as shown from the literature. Forexample, Aschenbrener (1995) and Buchanan andSmith (2005) found that the Hamburg WTD providedexcellent correlation with field performance of in-service HMA pavements. On the other hand, a weakcorrelation was found between the Hamburg WTDperformance results and the Federal HighwayAdministration’s accelerated loading facility (ALF)performance rutting data, as reported in Qi et al.(2006a,b).
In a Hamburg WTD rut test, the asphalt mixturetypically undergoes three stages of rutting duringthe test, as schematically illustrated in Figure 2. Thefirst (initial, or primary) stage is called theconsolidation (compaction) stage in which thecompacted asphalt mixture experiences furthercompaction due to the vertical loading applied bythe steel wheel. The second stage that follows thecompaction of the mixture is what is called thepermanent deformation (rutting) (or secondary)stage during which the asphalt mixture experiencespermanent rut due to both the induced verticalloading and the resulting shear forces. The final
Table 1The effect of material and other variables on rutting susceptibility
(Adapted from Sousa et al. 1991)
Category Parameter Direction of change Expected effecton rutting potential
Aggregate properties Surface texture Smooth to rough DecreaseGradation Gap to continuous DecreaseShape Round to angular DecreaseSize Increase maximum Decrease
aggregate size
Binder properties Stiffness Increase Decrease
Mixture volumetric Binder content Increase Decreaseproperties Air void content Increase Increase
VMA Increase IncreaseCompaction method Varies Varies
Environmental or Temperature Increase Increaseoperating conditions State of stress or strain Increase in tyre pressure Increase
Number of load Increase IncreaserepetitionsWater Dry to wet Increase
(with moisturesensitive mix)
Thickness Increase Decrease

15
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
stage is called the tertiary (or flow) stage in whichthe asphalt mixture starts to exhibit noticeabledamage due to the combined effects of moisturesusceptibility and rutting.
MODELLINGPreviewThe literature is abundant with models forpredicting rut depth (or plastic strain) of hot mixasphalt material from knowledge of volumetricproperties of the mixture and number of loadingcycles. Some of those models are summarised inSousa et al. (1991). Most of those models weredeveloped to characterise the primary rutting. Afew models, however, were developed for the
characterisation of the three stages of rutting,namely primary, secondary and tertiary rutting. Asshown in Figure 2, the primary stage is characterisedby an initially high rate of rutting, predominantlyassociated with volumetric change, which decreaseswith N. The secondary stage is characterised by alow rate of rutting, exhibiting a nearly constant rateof volumetric change, which tends to increase nearthe onset of the tertiary stage. The tertiary stage ischaracterised by a high rate of rutting largelyassociated with plastic (shear) deformation withoutvolume change. Figure 3 shows the rutting depthcurve obtained for one of the asphaltic mixturesstudied in this paper and displays the three ruttingstages.
Figure 1The HamburgWheel-TrackingDevice (WTD)
Figure 2Typical HamburgWTD rutting data

16
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
The rut depth of an HMA layer can be computeddirectly as the product of an average plastic strainin the layer (or sublayer) and its thickness. Manyempirical and mechanistic-empirical based modelsutilising both the elastic and viscoelastic layertheories and with various degrees of complexityhave been suggested for the calculation of the plasticstrain as a function of number of load repetitions,material temperature, stresses, resilient (elastic)strains, mixture properties etc. More advancedtechniques based on nonlinear finite elementprocedures have also been used. Many of thosemodels are summarised in Sousa et al. (1991). Themechanistic-empirical design guide developedunder the NCHRP 1-37A project (NCHRP 2004)uses the model that relates the plastic strain at anynumber of load repetitions to the elastic (resilient)strain, which can be determined from the multilayerelastic theory.
Of particular interest to this present study, Zhou etal. (2004) suggested the use of a three-stage modelfor describing the relationship between thepermanent strain (εp) and the number of loadingcycles (N) in which each phase was assigned adifferent mathematical expression. As such, theprimary stage is modelled using a power law, thesecondary phase is assumed to be linear, while thetertiary model was exponential:
(1)
where a, b, c, d and f are model parameters, and εpSand εST are permanent strains corresponding toinitiation of the secondary and tertiary stagesrespectively, and NPS and NST are the correspondingnumber of load repetitions. Zhou et al. (2004)suggested a method that utilises the experimentalεp-N data to determine the location (εp, N) of theonset of the secondary and tertiary stages. That is,another set of four model parameters (εpS, εST, NPSand NST) will be needed to characterise the three-stage plastic strain–rut depth curve.
Proposed modelThe formulation complexity associated with thethree-equation model presented by Zhou et al. (2004)could be avoided, along with the advantage ofensuring that the continuity at the transition pointsis satisfied. This can be done by adopting a third-order (cubic) model to describe the relationshipbetween the rut depth (RD) and number of loadingcycles (N) anywhere within the three stages of rutting.The cubic model, which can be used to model therutting behaviour of the mixtures tested with theHamburg WTD, takes the form:
(2)
where RD = rut depth, N = number of wheel passes,and a, b, and c = model coefficients. It is believed thatthe model coefficients a, b, and c can be formulatedas functions of the material properties in the three-phase system of the asphalt mixture (air voids,asphalt binder, aggregates) and environmental ortesting conditions such as stress state, loading rate
Figure 3Rut depth versus number
of wheel passes forair-blown asphalt mixture

17
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
and mixture temperature. If these coefficients areestablished in terms of the material properties andoperating conditions, then the Hamburg WTD rutdepth can be modelled and predicted for any type ofmixture for which the properties of the ingredientsof the mixture and/or the volumetric properties ofthe compacted HMA and the operating conditionsare known. This kind of modelling requires carefuluse of the Hamburg WTD-measured rut data, andintensive calibration and verification of the modelon a variety of asphalt mixtures.
The advantages of the third-order model are (1) itsability to characterise the three stages in one simpleexpression, (2) its flexibility to fit data regardless ofthe number of rutting stages observed (for somemixtures the tertiary stage could not be reachedwith a reasonable number of passes), (3) it does notrequire a pre-knowledge of the location of the onsetof both the secondary and tertiary stages, (4) itcontains only three empirical parameters, and (5)the continuity condition at transition points(wherever they might be) is always satisfied.
A few limitations of this approach, however, arepresented herein: (1) the graphical approachpresented to locate the transition points betweenstages of rutting is somehow subjective, and (2) theanalytical solution presented in this paper requiressolving a quadratic equation that is the result of thefirst derivative of the curvature function for therelationship between rut depth and number of cycles.Sometimes the solution of this equation is not simple.
According to the cubic model (Equation 2), whenN = 0, RD = 0, and the rate of increase in rut depthwith N is constant and equal to c. That is, for newasphalt pavements, rutting is assumed to commenceat the same rate irrespective of the mixtureproperties. A similar model, although in logarithmicscales, was used by McLean and Monismith (1974)
to relate logεp to logN, where N is the number ofstress applications.
The third-order model (Equation 2) is probably thesimplest form of a mathematical model that canexhibit the three different stages of rutting in oneexpression. It is to be noted that the secondaryphase can be close to linear, depending on therelative values of a, b and c. When the model iscalibrated against actual performance data, theinfluence of the various variables will be reflectedin these coefficients. Typically, for a typical ruttingcurve representing the progression of the threestages, coefficients a and c take on positive values,whereas coefficient b takes on a negative value.
MODEL APPLICATIONA total of eight sets of εp–N data representing,rutting induced in the Hamburg WTD in asphaltmixtures prepared from the same aggregate mix,were used to examine the third-order model. Onlythe asphalt binder used in the asphalt mixturesdiffered. Eight asphalt binders were used in themodel application. They included two unmodifiedbinders (PG64-22 and PG70-22), air-blown, andfive polymer-modified binders: Terpolymer(Elvaloy), styrene-butadiene-styrene (SBS) linear-grafted, SBS linear, SBS radial-grafted, andchemically modified crumb rubber asphalt(CMCRA). The PG numbers shown are based on theSuperpave system criteria. All the binders werefrom the same source, a Venezuelan crude (blend ofBoscan and Bachaquero). The air-blown PG70-28was obtained by noncatalytic air blowing of a PG52-28. The polymer-modified grades were obtained byaddition of various amounts of different polymersto the PG64-22, the PG52-28, or a mixture of both inappropriate proportions. Table 2 shows theperformance grade and the polymer content of eachasphalt binder.
Table 2Properties of asphalt binders
Asphalt binder Polymer content % Performance grade
PG64 0.0 PG 64-28SBS linear 3.75 PG 70-28
SBS radial grafted 3.25 PG 70-28SBS linear grafted 3.75 PG 70-28
PG70 0.0 PG 70-22CMCRA 5.0 PG 76-28
Air-blown 0.0 PG 70-28Elvaloy 2.2 PG 76-28

18
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
The mixture gradation parameters as well as otherrelated properties are summarised in Table 3.Figure 4 shows the εp-N data obtained for the eightasphalt mixtures.
The third-order model was fitted to the data in orderto determine the three empirical constants,a, b and c. Figure 4 shows the experimental εp-Ncurves and the fitted models. Table 4 summarisesthe obtained values, as well as the correspondingcoefficient of determination R2 for the fitted models.
Because the model parameters a, b and c are affectedby binder type for the same mixture aggregate andgradation, and binder content, an attempt was madeto determine whether these empirical constants aredirectly and solely affected by binder stiffness. Foreach of the binders used in the eight mixtures, therutting parameter (G*/sin δ) was calculated andplotted against each of the three empirical constants.Here G* is the asphalt binder complex shear modulusand d is the asphalt binder phase angle. Table 5summarises the G*/sin δ values at 70°C for each ofthe eight asphalt binders used in the analysis. Figures5–7 illustrate the relationship between each of theconstants (a, –b, c) respectively and the ruttingparameter (G*/sin δ) for the studied asphaltmixtures. It is seen from Figures 5–7 that the ruttingparameter (G*/sin δ) at 10 rad/s was reasonably
adequate to describe the variation in the empiricalconstants with the use of a simple power model ofthe form:
(3)
where k and m are constants.
Table 6 summarises the values of k and m obtainedfor each of the eight binders used in the mixes, alongwith their R2.
The models can be used to predict the rutting curvefirst by determining a, b and c with the use ofEquation 3 and Table 6. Next, the third-order ruttingmodel given in Equation 2 can be used to plot a fullrutting curve for the desired range of loading cycles.
Figure 8 shows the simulation for a range of(G*/sin δ) values, using the third-order model withcoefficients determined from Equation 3 and Table 6for a sample of four asphalt mixtures.
The three stages of rutting are obvious from thesesimulated curves. As also shown in Figure 8, thesimulated rutting curves are very close to themeasured rutting curves for these asphalt mixtures,the fact that indicated the suitability and accuracy
Table 3Aggregate gradation and other related properties
Per cent passing (%)
Sieve size (mm) 92% Diabase 8% Natural sand Blend
25.0 100.0 – 100.019.0 98.6 – 98.712.5 73.9 – 76.09.5 58.7 100.0 62.0
4.75 39.5 95.8 44.02.36 27.2 88.2 32.11.18 19.4 74.8 23.8
0.600 14.4 46.0 16.90.300 11.1 14.1 11.30.150 8.2 4.8 7.90.075 5.7 2.9 5.5
Specific gravity and per cent absorption
Bulk dry SG1 2.933 2.565 2.892Bulk SSD2 2.956 2.601 2.916
Apparent SG1 3.002 2.659 2.961% Absorption 0.8 1.4 0.8

19
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
Table 4Regression coefficients for polynomial functions fitting the Hamburg
rutting data for all asphalt mixtures in the study
Asphalt mixture a b c R2
PG64 8.75722E-11 –9.15434E-07 4.79160E-03 0.989SBS linear 1.65032E-11 –2.18202E-07 2.40854E-03 0.989
SBS radial grafted 1.05081E-11 –1.59328E-07 1.81638E-03 0.993SBS linear grafted 1.74173E-11 –2.77697E-07 1.94150E-03 0.995
PG70 8.76328E-12 –2.01286E-07 2.13312E-03 0.985CMCRA 2.67466E-12 –8.41414E-08 1.21264E-03 0.971
Air-blown 4.52899E-12 –1.28638E-07 1.33335E-03 0.984Elvaloy 7.72961E-13 –3.69050E-08 7.26060E-04 0.962
Table 5G*/sin δδδδδ values for asphalt mixtures at 70°C
Asphalt mixture (G*/sin δ) at 10 rad/s (Pa)
PG64 1570SBS linear 2710
SBS radial grafted 2680SBS linear grafted 2880
PG70 2640CMCRA 4510
Air-blown 3870Elvaloy 4110
Figure 4Laboratory-measuredrutting data andfitted model forall mixtures

20
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
Figure 5The a constant versus G*/sin δ
value at 10 r/s
Figure 6The –b constant versus G*/sin δ
value at 10 r/s
Figure 7The c constant versus G*/sin δ
value at 10 r/s

21
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
Table 6k and m regression coefficients for the relationship between (G*/sin d) and a, –b and c
Constant k m R2
a 161.47 –3.826 0.831–b 94.14 –2.516 0.824c 384.81 –1.535 0.867
of the third-order models developed in this study tocharacterise rutting performance as obtained fromthe Hamburg WTD.
Comparison with field performanceLaboratory rutting performance was compared withthe performance obtained from field testing. Full-scale Accelerated Loading Facility (ALF) pavementtesting was conducted at the FHWA’s PavementTesting Facility (PTF) at Turner-Fairbank HighwayResearch Center (TFHRC) in McLean, Virginia, USA.Twelve PTF asphalt pavements were tested forrutting mode at two temperatures, 64°C and 74°C.All rutting tests were conducted using a wheel loadof 44 kN (10 000 lb) without transverse wander. Aninfrared heating system and thermocouples in thepavements provided the required pavementtemperature.
During the ALF loading, pavement-layer ruttingdata were collected through differential surveys oneight sets of reference plates installed at the time ofconstruction along the centreline of the test section,and located at the surface of the pavement and ontop of the aggregate base, in order to measure
permanent displacement at these two locations atpredetermined ALF loading passes. The differencebetween these two measurements yielded thepermanent vertical deformation (rutting) in theasphalt layer.
It was found that laboratory rutting performancecorrelated reasonably well with the ALF field ruttingperformance. For example, Figure 9 shows acomparison between the Hamburg WTD rut depthand the ALF rut depth at 64°C. Note that the Hamburgrutting tests were conducted for specimenssubmerged in water, whereas the ALF testing wasconducted with no water submersion. This mayexplain some of the scatter in Figure 9, which couldbe attributed to moisture damage to HMA in termsof stripping. While such comparison may not beconsidered fair enough, the WTD test seems to be areasonable test to characterise field rutting.
LOCATING TRANSITION POINTSTransition point refers to the point at which onestage ends and one stage begins. In the ruttingmodel presented here, there are two points: oneseparating the primary stage from the secondary
Figure 8Simulated rutdepths based onthe developedpolynomial modelsfor four asphaltmixtures

22
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
stage, and the other separating the secondary stagefrom the tertiary stage. These two points are shownin Figure 10, which describes the third-order ruttingmodel in terms of rut depth (RD) as function ofloading cycles (N). In Figure 10, NPS refers to thetransition point between primary and secondarystages, and NST between secondary and tertiarystages. It is not known exactly where one stagewould end or begin; however, both the analyticaland graphical procedures could be used to determinean approximate location of these two transitionpoints. The two procedures are briefly describedbelow.
Analytical procedureThe point where transition occurs seems to have thestrongest (maximum) curvature compared to theadjacent areas of the function, as shown inFigure 10. The maximum curvature is associatedwith smallest radius of a circle. Mathematically, thecurvature (K) for any function f(x) is determinedfrom:
(4)
Figure 9Hamburg rut depth
versus pavement rutdepth at 64°C for full-
scale pavements
Figure 10Analytical procedure
to determine location oftransition points

23
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
where f ′(x) and f ″(x) are the first and secondderivates of f(x). For the third-order rutting functionproposed in this study, f(x) is replaced byEquation 2. The locations of the maximum curvaturecan be obtained by taking the first derivative offunction K and equating it with zero (ie dK/dN = 0).The (dK/dN) is a quadratic function for which thereare two roots in the N > 0 range, representing the NSPand NST, and two additional roots in the N < 0range, which should be discarded.
Graphical procedureThe onset of the secondary and tertiary stages maybe obtained graphically by extending the tangentsof the nearly linear segments around the transitionpoint and determining the corresponding N wherethe two tangents intersect. This is illustratedschematically in Figure 11.
ComparisonThe graphical procedure is simple; however,drawing the tangents involves some subjectivity inlocating the nearly linear portions of the functions.However, determining the location of transitionpoints analytically is rather more involved andrequires finding the first derivative of an elaboratecurvature function, followed by solving a quadraticequation. The advantage of using the analyticalprocedure is that it offers a consistent and non-subjective approach to locating transition points.
CONCLUSIONSThe following conclusions were drawn on the basisof the results and findings of the analyses in thisstudy:
1. Rutting performance data obtained fromlaboratory testing can be modelled using asimple three-stage cubic function (polynomialfunction of the third degree) for which thelocation of the transitional points between thethree stages can be identified either analyticallyor graphically.
2. The effect of the asphalt binder properties onthe rutting performance of the asphalt mixturesis investigated and the asphalt binder ruttingparameter (G*/sin δ) is found to have a goodcorrelation with the rut depth obtained fromthe Hamburg WTD through the relationshipbetween (G*/sin δ) and the model coefficients a, –b and c.
3. The simulated rutting performance curvesbased on the developed cubic models areobtained and plotted against the measuredrutting performance curves. There is areasonable correlation between the two sets ofcurves, indicating the suitability and accuracyof the proposed model to represent the ruttingdata.
4. The model developed in this study indicatesthat the asphalt binder rutting parameter
Figure 11Graphical procedure to determinelocation of transition points

24
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
G*/sin δ has an impact on the values of themodel coeff ic ients a , –b and c , andconsequently on the rate of rutting of asphaltmixtures. Also, the asphalt mixture properties(and aggregate properties) seem to have aneffect on the amount of rutting developed inasphalt mixtures, and that effect is alreadyincorporated in the degree of the polynomialfunction that fitted the rutting data.
5. Because of the small number of binders used inthis study (8 binders), further work is needed toexpand the study to cover a wider variety ofbinders and asphalt mixtures.
REFERENCESASCHENBRENER, T (1995). Evaluation of HamburgWheel-Tracking Device to predict moisture damage inhot-mix asphalt, Journal of the Transportation ResearchBoard, Transportation Research Record No. 1492, NationalResearch Council, Washington DC, pp.193–201.
BUCHANAN, MS and SMITH, BJ (2005). Performanceevaluation of hot-mix (HMA) asphalt using rotary loadedwheel testing, Presented at the Transportation ResearchBoard Annual Meeting, National Research Council,Washington, DC.
CLAESSEN, AIM, EDWARDS, JM, SOMMER, P andUGE, P (1977). Asphalt pavement design, the ShellMethod, Proceedings of the 4th International Conference onthe Structural Design of Asphalt Pavements, Vol. I, AnnArbor, MI, pp.39–74.
DESAI, CS, SOMASUNDARAM, S and FRANTZISKONIS,G (1986). A hierarchical approach for constitutivemodelling of geologic materials, International Journal ofNumerical and Analytical Methods in Geomechanics, 10(3),225–57.
EISENMANN, J and HILMER, A (1987). Influence ofwheel load and inflation pressure on the rutting effectat asphalt pavements – Experiments and theoreticalinvestigations, Proceedings of the 6th InternationalConference on the Structural Design of Asphalt Pavements,Vol. I, Ann Arbor, MI, pp.392–403.
EPPS, JA, HAND, A, SEEDS, S, SCHOLZ, T, ALAVI, S,ASHMORE, C, MONISMITH, CL, DEACON, JA,HARVEY, JT and LEAHY, RB (2002). Recommendedperformance-related specifications for hot-mix asphaltconstruction, NCHRP Report 455, National CooperativeHighway Research Program, Transportation ResearchBoard, National Research Council, Washington, DC.
HENNING, TFP, COSTELLO, SB, and WATSON, TG(2006). A Review of the HDM/dTIMS Pavement ModelsBased on Calibration Site Data, Research Report Number907, Land Transport New Zealand, Wellington.
HENNING, T, DUNN, R, COSTELLO, S and PARKMAN,C (2009). A new approach for modeling rutting on theNew Zealand state highways, Road & Transport ResearchJournal, 18(1), 3–18.
KENIS, WJ (1978). Predictive Design Procedure, VESYSUser’s Manual: An Interim Design Method for FlexiblePavement Using the VESYS Structural Subsystem. FinalReport No. FHWA-RD-77-154, FHWA, Washington,DC.
MCLEAN, DB (1973). Permanent DeformationCharacteristics of Asphalt Concrete, PhD dissertation,University of California, Berkeley, CA.
MCLEAN, DB and MONISMITH, CL (1974). Estimationof permanent deformation in asphalt concrete layersdue to repeated traffic loading, Journal of theTransportation Research Board, Transportation ResearchRecord No. 510, pp.15–30.
MEDANI, TO (2006). Design Principles of Surfacings onOrthotropic Steel Bridge Deckso:, PhD thesis, DelftUniversity of Technology, the Netherlands.
MONISMITH, CL (1976). Rutting prediction in asphaltconcrete pavements, Journal of the Transportation ResearchBoard, Transportation Research Record No. 616, pp.2–8.
MURAYA, PM (2007). Permanent Deformation of AsphaltMixtures, PhD thesis, Delft University of Technology,the Netherlands.
NCHRP 1-37A (2004). Guide for Mechanistic-EmpiricalDesign of New and Reconstructed Flexible Pavements, Part3: Design Analysis, Final Report, <http://www.trb.org/mepdg/Part3_Chapter3_Flexible%20Design.pdf>.
NUNN, ME (1986). Prediction of Permanent Deformation inBituminous Pavement Layers, Research Report 26,Transport and Road Research Laboratory, Great Britain.
QI, X, SHENOY, A, AL-KHATEEB, GG, ARNOLD, T,GIBSON, N, YOUTCHEFF, J and HARMAN, T (2006a).Accelerated performance testing of crumb rubberasphalts and other modified asphalt systems, Proceedingsof the Asphalt Rubber Conference, October, San Diego,California.
QI, X, AL-KHATEEB, GG, SHENOY, A, MITCHELL, T,GIBSON, N, YOUTCHEFF, J and HARMAN, T (2006b).Performance of the FHWA’s ALF modified binderpavements, Proceedings of the 10th International Conferenceon Asphalt Pavements, Quebec, Canada.
SOUSA, JB, CRAUS, J and MONISMITH, CL (1991).Permanent Deformation in Asphalt Concrete, SummaryReport, Strategic Highway Research Program, SHRP,SHRP-A-318.
THROWER, EN (1977). Methods of predictingdeformation in road pavements, Proceedings 4thInternational Conference on the Structural Design of AsphaltPavements, Vol. I, Ann Arbor, pp.540–54.
ZHOU, F, SCULLION, T and SUN, L (2004). Verificationand modeling of three-stage permanent deformationbehavior of asphalt mixes, Journal of TransportationEngineering, American Society of Civil Engineering, 130(4),pp.486–94.

25
A three-stage rutting model utilising rutting performance data from the Hamburg Wheel-Tracking Device (WTD)
Vol 18 No 3 September 2009 Road & Transport Research
Ghazi Al-Khateeb
Dr. Ghazi Al-Khateeb is an assistant professor in the Department of Civil Engineeringat Jordan University of Science and Technology. He is the vice-director of theConsultative Center for Science and Technology (CCST) at the university. Dr. Al-Khateeb also worked in the Pavement Materials and Construction Team at the Turner-Fairbank Highway Research Center (TFHRC) of the Federal Highway Administration(FHWA) in McLean, Virginia of the United States of America (USA) as a seniorresearch engineer and on-site technical manager during the time period of 11/2000-09/2006. Dr. Al-Khateeb’s research areas include pavement design and performance,characterization of bituminous materials, dynamic testing and modeling of asphaltbinders and mixtures, mechanistic performance analysis of asphalt pavements,constitutive model development, pavement damage and mechanics, Superpave mixdesign and performance, aging of asphalt pavements, and instrumentation.
Imad Basheer
Dr. Imad Basheer is a senior supervising pavement engineer with the CaliforniaDepartment of Transportation, Sacramento, California, USA. He is the chairman ofthe Mechanistic-Empirical Pavement Design Team and the chief of the StructureDesign Branch in the Division of Pavement Management. He was also a seniorhighway research engineer in the FHWA Turner-Fairbank Highway Research Center,McLean, Virginia, USA. His research areas include pavement design and performancemodeling, forensic pavement failure investigation, geotechnical design and groundstabilization, geomaterials characterization, and statistical and probabilistic analysisand modeling of civil engineering systems.
CONTACTDr Ghazi Al-KhateebAssistant ProfessorDepartment of Civil EngineeringJordan University of Science and TechnologyIrbid, 22110, JordanEmail: [email protected]
DISCLAIMER AND ACKNOWLEDGEMENTThe experimental part of this study was completed in 2006 while both authors wereemployed at the Turner-Fairbank Highway Research Center of the Federal HighwayAdministration in McLean, Virginia, USA. The accuracy of the data is the soleresponsibility of the authors of this paper. The findings and opinions expressed in thispaper reflect those of the authors and not those of the Federal Highway Administration,or California Department of Transportation, or Jordan University of Science andTechnology. The authors would like to thank the technicians Scott Parobeck, FrankDavis, and Susan Needham who assisted in conducting the experiments.