-
Summary of Last Day
Systems with feedback have damped sinusoids in impulse
response
Showed how Laplace could be used to identify damped sinusoids
and unstable systemsX
Real Axis ()
imaginary axis (j)
0
X
X
X
X
X
XX X
X
-
Fourier a Subset of Laplace
Fourier and Laplace very similar In fact when = 0, Fourier
and
Laplace almost identical
dtethH tj
= )()(
jswheredtethsH st +== ,)()(0
-
Fourier view of RC circuit
The frequency response H( ) of the series RC circuit is 1/(1+j
RC) Can show this using reactance/impedance
methods OR By Taking Fourier Transform of differential
equation
relating time-domain inputs and outputs of the RC circuit, given
by
dttdvRCtvtv ooi)()()( +=
vi
R
C vo
vR
-
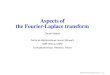
Frequency Response of RC circuit
10-2 10-1 100 101-30
-25
-20
-15
-10
-5
0
RC=0.7
RC=1
RC=3
Radians/second
20log10|H()|
Frequency Response dependent upon product of R and C
-
Frequency Response of RC circuitFrequency Response dependent
upon product of R and C
0 2 4 6 8 10-30
-25
-20
-15
-10
-5
0
RC=0.7
RC=1
RC=3
Radians/second
20log10(|H()|)
-
Impulse Response of RC circuit - time domain
It has already been shown the the frequency response of the RC
circuit is given by H( ) = 1/(1+j RC)
Using Fourier Transform tables it can then be shown that the
impulse response of an RC circuit is h(t)=(1/RC) e-t/RC
The impulse response of the RC circuit can be though of as a
damped sinusoid with a frequency of zero. This implies that a pole
exists on s-plane.
Where is the pole situated on the s-plane? (Next slide may
help)
-
Pole position relationship with impulse response
X
Real Axis ()
imaginary axis (j)
0
X
X
X
X
X
XX X
X
-
Pole Position for RC circuit
The impulse response of the RC circuit is h(t)=e-t/RC
There is no oscillating frequency component, so =0. The pole is
therefore be positioned on the real axis of the simplified s-plane
representation.
Proof: Pole occurs when |H(s)| = , i.e. s = -1/RC No imaginary
term Pole always on LHS of s-plane since R and C
always positive (System stable or unstable?)
1/RC)(s1
RC1 H(s)
+=
-
Pole Position for RC circuit simplified s-plane (pole zero
plot)
XReal Axis ()
imaginary axis (j)
-1/RC0
-
Pole Position for RC circuit 3D view of S-plane
What is the value of RC?
-
When are Laplace and Fourier effectively the same?
when = 0, Fourier and Laplace almost identical
Where on the S-Plane is = 0?
dtethH tj
= )()(
jswheredtethsH st +== ,)()(0
-
Pole Position for RC circuit 3D view of S-plane RHS removed
-
Side View of S-Plane RC = 3RHS of s-plane removed
Shaded Area showsFrequency Responseof System
RC =3 for Slides 10, 12, 13
Compare with Slide 5
-
Side View of S-Plane RC = 0.7
RC =0.7 in these plotsCompare with Slide 5
-
Main Points
Pole Positions on s-plane and frequency response of system
closely related.
Fourier is effectively a subset of Laplace
Generally a system described in terms of H(s) (aka System
Transfer Function) because its the best representation to
understand behaviour of the system Why? Shows system stability Its
easy enough to get an idea of the frequency
response. With some training it can be easy enough to
determine
the step response of a system from H(s)
-
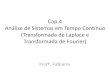
More examples with 2 poles2 Poles => second order system
Shaded area showsFrequency response of system
S-plane
( ) ( )jsjssH +++= 221)(
Pole ZeroPlot
Real Axis()
imaginaryaxis(j)
0
X
X
5
-5
5
-
More examples with 2 poles2 Poles => second order system
Pole ZeroPlot
Real Axis()
imaginaryaxis(j)
0
X
X
5
-5
5
S-plane
( ) ( )jsjssH 3.023.021)(
+++=
Shaded area showsFrequency response of system
Summary of Last DayFourier a Subset of LaplaceFourier view of RC
circuitFrequency Response of RC circuitSlide 5Impulse Response of
RC circuit - time domainPole position relationship with impulse
responsePole Position for RC circuitPole Position for RC circuit
simplified s-plane (pole zero plot)Pole Position for RC circuit 3D
view of S-planeWhen are Laplace and Fourier effectively the
same?Pole Position for RC circuit 3D view of S-plane RHS
removedSide View of S-Plane RC = 3 RHS of s-plane removedSide View
of S-Plane RC = 0.7Main PointsMore examples with 2 poles 2 Poles
=> second order systemSlide 17