Embed Size (px)
Citation preview

JU –
2017
/HL
1
Dynamics and control of mechanical systemsDate ContentDay 1(01/08)
• Review of the basics of mechanics. • Kinematics of rigid bodies - coordinate transformation, angular velocity
vector, description of velocity and acceleration in relatively moving frames. Day 2(03/08)
§ Euler angles, Review of methods of momentum and angular momentum of system of particles, inertia tensor of rigid body.
• Dynamics of rigid bodies - Euler equations, application to motion of symmetric tops and gyroscopes and problems of system of bodies.
Day 3(05/08)
• Kinetic energy of a rigid body, virtual displacement and classification of constraints.
• D’ Alembert’s principle. Day 4(07/08)
• Introduction to generalized coordinates, derivation of Lagrange's equation from D’ Alembert’s principle.
• Small oscillations, matrix formulation, Eigen value problem and numerical solutions.
Day 5(09/08)
• Modelling mechanical systems, Introduction to MATLAB®, computer generation and solution of equations of motion.
• Introduction to complex analytic functions, Laplace and Fourier transform.Day 6(11/08)
• PID controllers, Phase lag and Phase lead compensation. • Analysis of Control systems in state space, pole placement, computer
simulation through MATLAB.
DMS6021 - Dynamics and Control of Mechanical Systems
JU –
2017
/HL
2
Contents
Focuses on4 Derivation of Euler angles
4 Review of principle of impulse and angular momentum4 Angular moments in 3D and inertia tensors
4 Examples
DMS6021 - Dynamics and Control of Mechanical Systems
JU –
2017
/HL
3
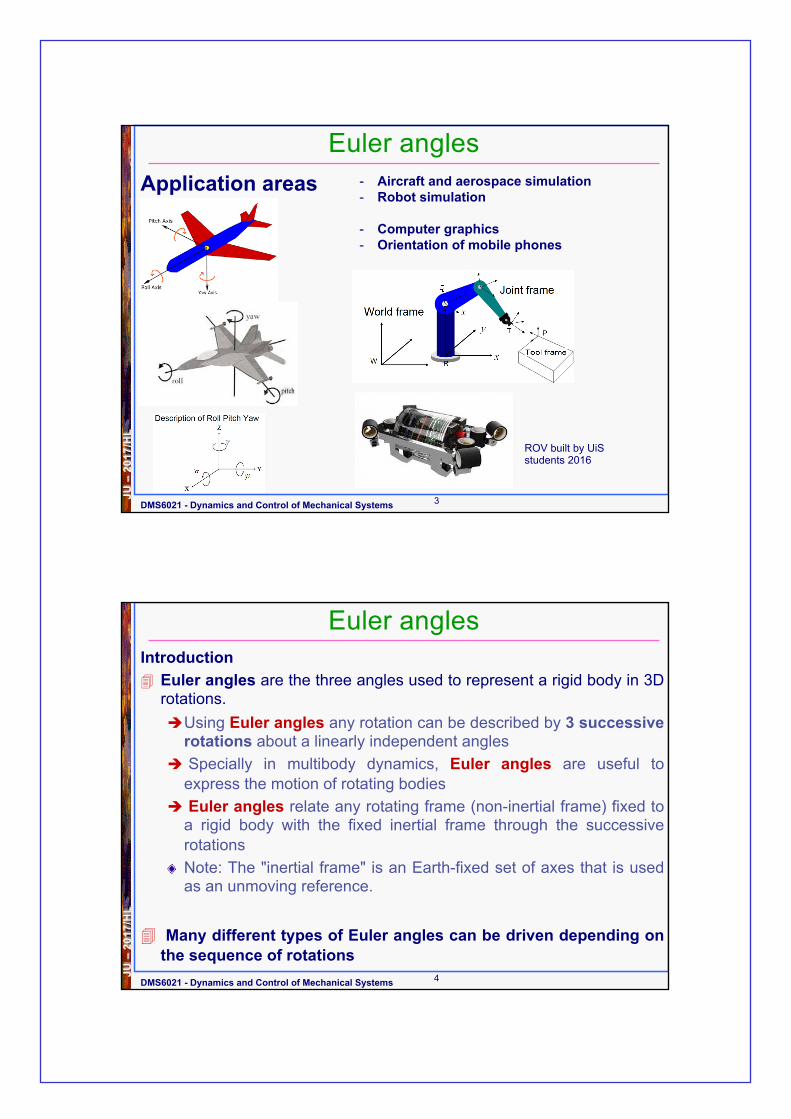
Euler anglesApplication areas
RR
DMS6021 - Dynamics and Control of Mechanical Systems
- Aircraft and aerospace simulation- Robot simulation
- Computer graphics- Orientation of mobile phones
ROV built by UiS students 2016
JU –
2017
/HL
4
Euler anglesIntroduction4 Euler angles are the three angles used to represent a rigid body in 3D
rotations.èUsing Euler angles any rotation can be described by 3 successive
rotations about a linearly independent anglesè Specially in multibody dynamics, Euler angles are useful to
express the motion of rotating bodiesè Euler angles relate any rotating frame (non-inertial frame) fixed to
a rigid body with the fixed inertial frame through the successiverotationsNote: The "inertial frame" is an Earth-fixed set of axes that is usedas an unmoving reference.
4 Many different types of Euler angles can be driven depending onthe sequence of rotations
DMS6021 - Dynamics and Control of Mechanical Systems

JU –
2017
/HL
5
Euler anglesLet’s consider the following sequence of rotation: αà b à g, for rotation about x, Y’ and Z’’ (à 1-2-3 sequence)
DMS6021 - Dynamics and Control of Mechanical Systems
Determine R = RgRbRα
JU –
2017
/HL
6
Euler anglesMultibody dyanamics for robotics and simulation software in ADAMS uses the 3-1-3 sequenceShow that the following are correct for the 3-1-3 sequence, i.e.Rotation about z by α (Rzα)à rotation about x´ by b (Rx´b) à rotation about z´´ by g (Rz´´g)
DMS6021 - Dynamics and Control of Mechanical Systems
úúú
û
ù
êêê
ë
é -=
úúú
û
ù
êêê
ë
é-=
úúú
û
ù
êêê
ë
é -=
10000
00
001;
10000
''
'
gggg
bbbbaa
aa
g
ba
CSSC
R
CSSCRCS
SCR
z
xz
Resultant Eulerian rotation matrix𝐶𝛼𝐶𝛾 − 𝑆𝛼𝑆𝛾𝐶𝛽 − (𝐶𝛼𝑆𝛾 + 𝑆𝛼𝐶𝛾𝐶𝛽)𝑆𝛾𝑆𝛽𝑆𝛼𝐶𝛾 + 𝐶𝛼𝑆𝛾𝐶𝛽 − 𝑆𝛼𝑆𝛾 + 𝐶𝛼𝐶𝛾𝐶𝛽 − 𝐶𝛼𝑆𝛽𝑆𝛾𝑆𝛽𝐶𝛼𝑆𝛽𝐶𝛽
S = SinC = Cos

JU –
2017
/HL
7
Review of momentum and angular momentum 4 Principle of impulse and momentum
DMS6021 - Dynamics and Control of Mechanical Systems
!"!#$!"!#$momentumLinear
v
v
impulseLinear
t
tmvmvmddt
gIntegratindtdmmLawSecondsNewotn
12
2
1
2
1
:;:'
-===
==
òò å
åvFL
vaF
4 The principle says: impulse applied to an object during a time interval ( t1 – t2) is equal to the change in the object’s linear momentum
4 Note: Impulse force is a force of large magnitude acting over a short period of time
ò åå -= 2
112
1:t
tav dtFtt
FforceAverage
JU –
2017
/HL
8
Review of momentum ….4 Principle of impulse and momentum …
DMS6021 - Dynamics and Control of Mechanical Systems
The linear momentum (L) of a rigid body is defined as
L = m vc where vc is velocity of the mass center
è The linear momentum vector L has a magnitude equal to (mvc) and a direction defined by vc.
The angular momentum (Hc) of a rigid body rotating with angular velocity 𝛚 about its mass center (c) is defined as
Hc = Ic𝛚Where the direction of Hc is perpendicular to the plane of rotation, and Icis mass moment of inertia about its mass center.

JU –
2017
/HL
9
Review of momentum …4 Principle of impulse and momentum ...
DMS6021 - Dynamics and Control of Mechanical Systems
When a rigid body undergoes rectilinear or curvilinear translation, its angular momentum is zero because 𝛚 = 0
è L = m vc and Hc = 0For a rigid body motion about a fixed axis passing through point O:- Linear momentum: L = mvc- Angular momentum about C: Hc = Ic𝛚- Angular momentum about the center of rotation O.
HO = ( rc × mvc) + Ic 𝛚 = IO 𝛚
where Io is calculated about OMoment of linear momentum
JU –
2017
/HL
10
Review of momentum …4 Angular momentum
DMS6021 - Dynamics and Control of Mechanical Systems
!"!#$å=== FrvrvrH xdtdmxmx
dtd
dtd
momentumangularofchangeofRate
o )(
( )! dt
dmxmxdtdmx
dtdwhere
dtdmxmxx
xm
vrv
v
rvr
vrarFr
vv
+=
==
=
å
"#"$%0)(
Angular momentumabout OHo = r x mv
à Moment of linear momentum
Rate of change of the moment of momentum about point o
( ) 12
2
1
2
1 oo
H
H o
impulseAngular
t
to ddtxx
dtd
momentumangularofchangeofRate
HHHFrFrH-==Þ= òò åå
!! "!! #$Principle of angular impulseand momentum

JU –
2017
/HL
11
Review of momentum …4 Angular momentum in matrix form
DMS6021 - Dynamics and Control of Mechanical Systems
Exercise: Show that the following components of the angular momentum are correct
Where r = xi + yj + zkand v = (vx, vy, vz)
JU –
2017
/HL
12
Review of momentum ….4 Consrevation of angular momentum
DMS6021 - Dynamics and Control of Mechanical Systems
The angular momentum is conserved wheni.e.If the resultant moment about a fixed point Ois zero, then angular momentum remains constant,or it is said to be conserved. Note: Angular momentum may be conserved in one coordinate(e.g., x), but not necessarily in others (e.g., y or z)
and

JU –
2017
/HL
13
Review of momentum …4 Angular momentum of a rigid body in 3D- Let’s define an arbitrary angular velocity vector
as w = (wx wy wz)- Equation of angular momentum:
H = r x mv = r x m(r x w) = m(r x (r x w)), where r = (x, y, z)
4 Using equation for double cross product: A x (B x C) = B(A.C) – C(A.B)
r x (r x w) =
DMS6021 - Dynamics and Control of Mechanical Systems
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) zyx
zyx
zyx
yxyzxz
zyxzxy
zxyxzy
www
www
www
22
22
22
++×-×-
×-++×-
×-×-+=×-× ω)r(rr)ω(r ( )
( )
( ) z
I
y
I
x
I
z
z
I
y
I
x
I
y
z
I
y
I
x
I
x
zzzyzx
yzyyyx
xzxyxx
yxmyzmxzm
zymxzmxym
zxmyxmzym
www
www
www
!! "!! #$!"!#$!"!#$
!"!#$!! "!! #$!"!#$
!"!#$!"!#$!! "!!#$
ååå
ååå
ååå
++--=
-++-=
--+=
22
22
22
).().(
).().(
).().(
H
H
H
JU –
2017
/HL
14
Review of momentum …4 Inertia Tensors of rigid bodies- Expressed in matrix form
DMS6021 - Dynamics and Control of Mechanical Systems
úúú
û
ù
êêê
ë
é
w
ww
úúú
û
ù
êêê
ë
é
=úúú
û
ù
êêê
ë
é
z
y
x
zzzyzx
yzyyyx
xzxyxx
z
y
x
III
III
III
H
HH
Angular speedInertia Tensor of the body about its masscenter
Angularmomentum
Note: • The term tensor refers to a higher-order vector.
A vector is written as a column, while a tensor is written as a matrix.
• The inertial tensor has the property thatIij = Iji è it is a symmetirc tensor of 2nd order and I = IT
úúú
û
ù
êêê
ë
é
www
úúú
û
ù
êêê
ë
é=úúú
û
ù
êêê
ë
é
3
2
1
333231
232221
131211
3
2
1
IIIIIIIII
HHH
Alternatively: Letting Ixx = I11 , Iyy = I22 , Izz = I33 , Ixy = I12 , etc.
jijij IH w×=
Inertia Tensors transform the vector w into the vector Hc

JU –
2017
/HL
15
Review of momentum …4 Inertia Tensors of rigid bodies in 3D- Inertia tensor is calculated through a point independent of the axis of
rotation, and once that is established, the angular momentum aboutany axis through that point can be determined.à If a new system of axes is used
- a new inertia tensor is obtained- the angular momentum Hc = f(w) remain the same because it is
independent of the choice of coordinate system- If the coordinate system coincides with the principal axes (axes where
the angular momentum and the angular speed coincide), calculation ofinertia tensors is especially simple.
DMS6021 - Dynamics and Control of Mechanical Systems
úúú
û
ù
êêê
ë
é
=
z
y
x
II
II
00
0000 Where Ix , Iy and Iz are principal centroidal moments
If Ix = Iy = Iz, Hc and w are collinear, otherwise (in general) theprincipal moments are different and hence Hc and w are in different directions
JU –
2017
/HL
16
Review of momentum …
DMS6021 - Dynamics and Control of Mechanical Systems
4 Example: Consider that the cube of dimension a has a uniform distribution of mass with density r = m/a3.
(1) Find the inertia tensor for rotation about one of the cornersas given in the figure.
(2) Assume that the cube rotates about x-axis and find theangular momentum

JU –
2017
/HL
Example, Inertia Tensor for Cube4 The mass of the cube is evenly distributed è the summation can be
converted to integration For example, the upper-leftelement becomes:
where denotes the mass density.
4 Thus,
4 Symmetry condition give that Ixx = Iyy = Izz, and similarly for the off-diagonal elements.
2 2
0 0 0( ),
a a a
xxI dx dy dz y zr= +ò ò ò %
3/M ar =%
( )2 2 5 22 23 30 0 0 0 0 0
.a a a a a a
xxI dx y dy dz dx dy z dz a Mar r= + = =ò ò ò ò ò ò% %
DMS6021 - Dynamics and Control of Mechanical Systems
JU –
2017
/HL
Example, Cont’d4 The off-diagonal elements have the form
4 By symmetry, all the off-diagonal elements have the same value. Thus, the moment of inertia tensor is
4 The angular momentum for rotation about any axis through this corner.Examples:4 Rotation about x axis (w = (w, 0, 0)): L = Iw = Ma2/12 (8w, -3w, -3w)
= Ma2w (2/3, -1/4, -1/4).
4 Rotation about diagonal through O ( ):
5 21 14 40 0 0 0 0 0
, .a a a a a a
xyI dx dy dz xy xdx ydy dz a Mar r r= - = - = - = -ò ò ò ò ò ò% % %
2 2 22 1 13 4 4 2
2 2 21 2 14 3 4
2 2 21 1 24 4 3
8 3 33 8 3 . [about a corner]
123 3 8
Ma Ma MaMaMa Ma Ma
Ma Ma Ma
é ù- - - -é ùê ú ê ú= - - = - -ê ú ê úê ú ê ú- - - -ë ûë û
I
/ 3 (1, 1, 1)w=ω
2 2 28 3 3 1 23 8 3 1 2 .
12 12 63 33 3 8 1 2
Ma Ma Maw w- -é ù é ù é ù
ê ú ê ú ê ú= = - - = =ê ú ê ú ê úê ú ê ú ê ú- -ë û ë û ë û
L Iω ω
L not in samedirection asrotation axis
L is in samedirection asrotation axis
DMS6021 - Dynamics and Control of Mechanical Systems

JU –
2017
/HL
Example, Cont’d4 If the origin is shifted to the center of the cube, the diagonal element
integrals are just as easy, simply change the limits, e.g.
but the off-diagonals are all odd functions, so the change the limits leads them to go to zero, e.g.
4 The inertia tensor is then diagonal, i.e.
4 Note that, no matter what direction w is, L is always parallel to it:
/2 /2 /2 /2 /2 /2
/2 /2 /2 /2 /2 /2, 0.
a a a a a a
xy a a a a a aI dx dy dz xy xdx ydy dzr r
- - - - - -= - = - =ò ò ò ò ò ò% %
2 21 0 00 1 0 .
6 60 0 1
Ma Maé ùê ú= =ê úê úë û
I 1
( )/2 /2 /2 /2 /2 /22 2 2 3 22 13 6/2 /2 /2 /2 /2 /22 ( / 2) .
a a a a a a
xx a a a a a aI dx y dy dz dx dy z dz a a Mar r
- - - - - -= + = =ò ò ò ò ò ò% %
2
.6Ma
= =L Iω ω
DMS6021 - Dynamics and Control of Mechanical Systems
JU –
2017
/HL
Summary and questions
Next: Dynamics of rigid bodies - Euler equations, application to motion of symmetric tops and gyroscopes …
DMS6021 - Dynamics and Control of Mechanical Systems
In this lecture, the following are covered
4 Euler angles: Example applications and derivations
4 Review of the principle of angular impulse and moment
4 Review of angular momentum and its conservation
4 Angular moments in 3D and inertia tensors
?
JU –
2017
/HL
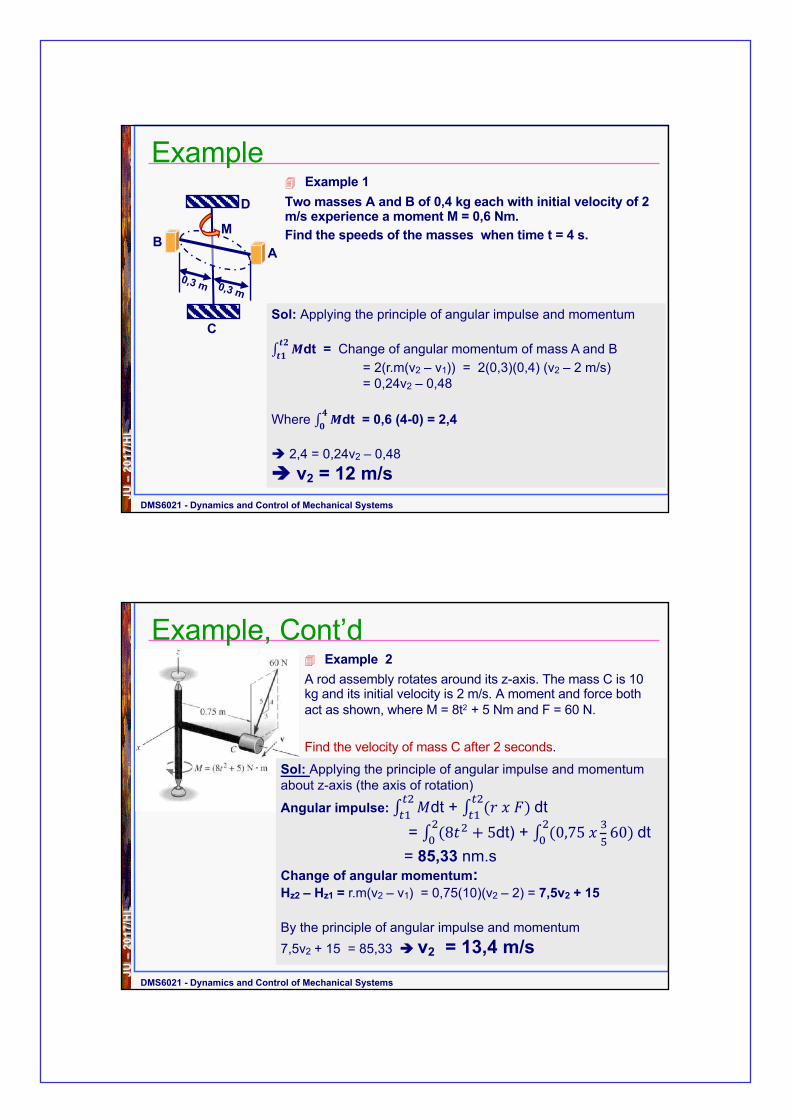
Example4 Example 1Two masses A and B of 0,4 kg each with initial velocity of 2 m/s experience a moment M = 0,6 Nm.Find the speeds of the masses when time t = 4 s.
DMS6021 - Dynamics and Control of Mechanical Systems
AB
C
D
M
Sol: Applying the principle of angular impulse and momentum
∫ 𝑴𝒕𝟐𝒕𝟏 dt = Change of angular momentum of mass A and B
= 2(r.m(v2 – v1)) = 2(0,3)(0,4) (v2 – 2 m/s) = 0,24v2 – 0,48
Where ∫ 𝑴𝟒𝟎 dt = 0,6 (4-0) = 2,4
è 2,4 = 0,24v2 – 0,48è v2 = 12 m/s
JU –
2017
/HL
Example, Cont’d4 Example 2A rod assembly rotates around its z-axis. The mass C is 10 kg and its initial velocity is 2 m/s. A moment and force bothact as shown, where M = 8t2 + 5 Nm and F = 60 N.
Find the velocity of mass C after 2 seconds.
DMS6021 - Dynamics and Control of Mechanical Systems
Sol: Applying the principle of angular impulse and momentumabout z-axis (the axis of rotation)Angular impulse: ∫ 𝑀45
46 dt + ∫ (𝑟𝑥𝐹)4546 dt
= ∫ (8𝑡5 + 55= dt) + ∫ (0,75𝑥 AB 60)
5= dt
= 85,33 nm.sChange of angular momentum: Hz2 – Hz1 = r.m(v2 – v1) = 0,75(10)(v2 – 2) = 7,5v2 + 15
By the principle of angular impulse and momentum7,5v2 + 15 = 85,33 è v2 = 13,4 m/s





























