Embed Size (px)
DESCRIPTION
20_-__azionamenti_dc__bldc_e_step
Citation preview

Azionamenti in Corrente Continua
REGOLAZIONE DI COPPIA E VELOCITA’ CON ECCITAZIONE INDIPENDENTE
Controllo diarmatura
Controllo di campo

Azionamenti in Corrente Continua
Regolazione della velocità ad anello aperto

Azionamenti in Corrente Continua
Regolazione della velocità ad anello chiuso

Azionamenti in Corrente Continua
Controllo ad anello chiuso di posizione, velocità e corrente
Azionamenti in Corrente Continua
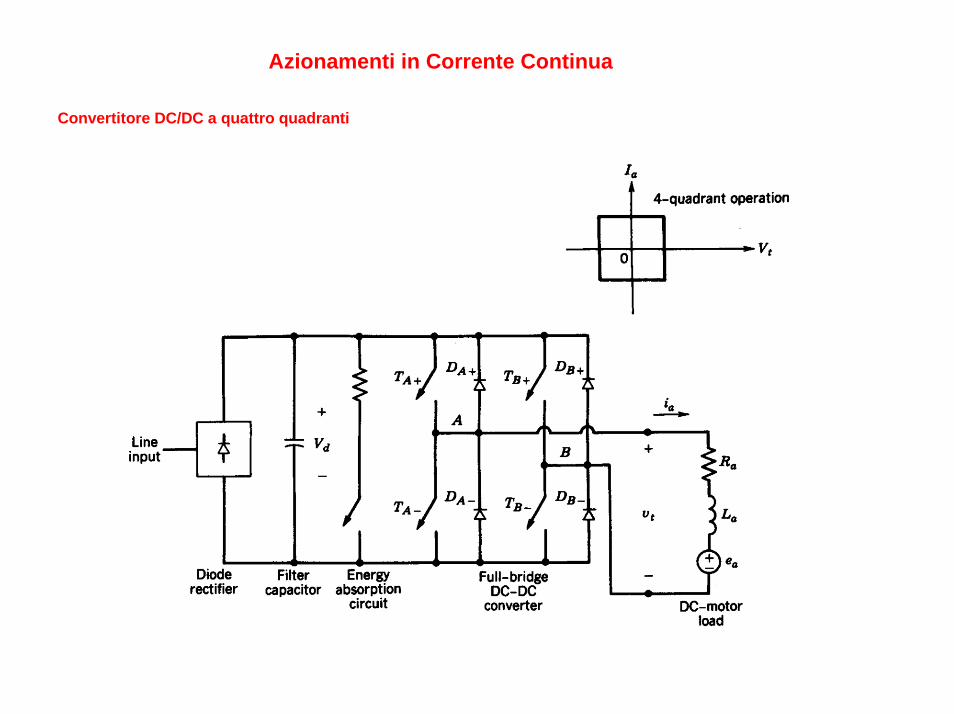
Convertitore DC/DC a quattro quadranti

Azionamenti in Corrente Continua
Convertitori DC/DC a due ed ad un quardante

Azionamenti in Corrente Continua
Convertitori AC/DC
Azionamenti DC Brushless
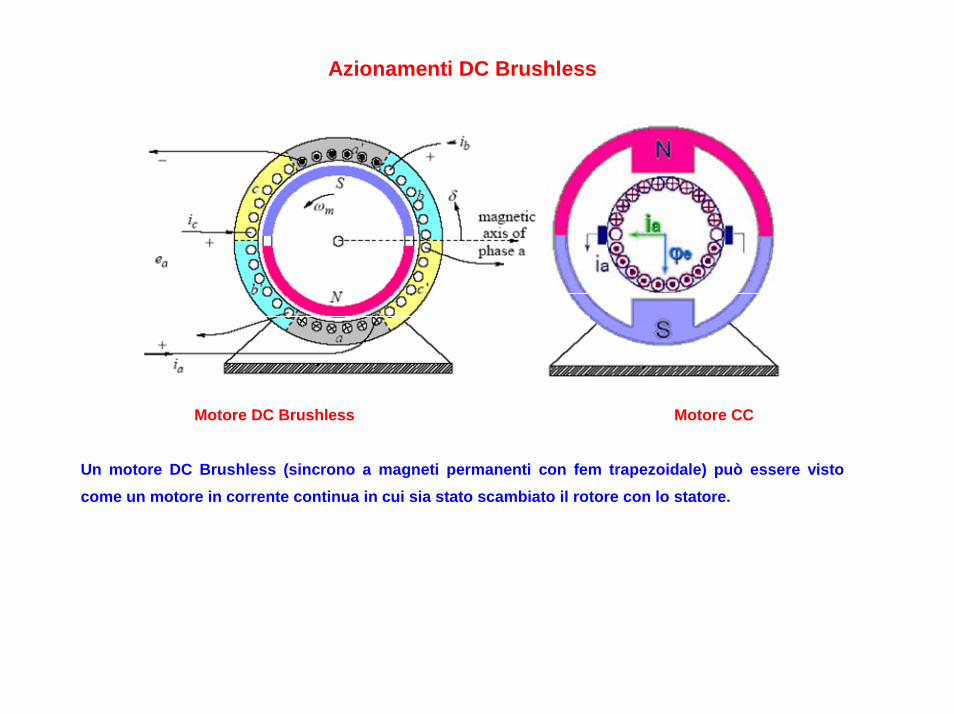
Motore DC Brushless Motore CC
Un motore DC Brushless (sincrono a magneti permanenti con fem trapezoidale) può essere visto come un motore in corrente continua in cui sia stato scambiato il rotore con lo statore.

Azionamenti DC Brushless
Motore DC Brushless
Ia
Ia
NS
Ia
Motore in corrente continua

Azionamenti DC Brushless
Commutatore elettronico
La commutazione non avviene per mezzo del commutatore a lamelle ma per mezzo di interruttori elettronici.
Le fasi vengono alimentate periodicamente a coppie.

Azionamenti DC Brushless
Flusso concatenato con una spira e tensione indotta

Azionamenti DC Brushless
Tensione indotta negli avvolgimenti di fase
La tensione indotta in un avvolgimento di fase è costante quando tutte le spire sono affacciate sullo
stesso polo, è invece variabile linearmente quando alcune spire sono affacciate sul polo nord e altre
sul polo sud.

Azionamenti DC Brushless
Coppia elettromagnetica
Il valore istantaneo della coppia di un motore brushless a magneti superficiali può essere espresso come:

Azionamenti DC Brushless
Coppia elettromagnetica
( )[ ] ( )[ ] ( ) IkI lBN22EIω
1i eeω1ieie
ω1ie
ω1C Trfs
maba
mabaa
m
m
1jjj
mprinc ==−=−−=−+−=−= ∑
=
Per generare una coppia costante è necessario alimentare le fasi statoriche in corrispondenza del tratto costante della forza elettromotrice indotta trapezoidale In ciascun intervallo di tempo pari a π/3 una corrente deve essere nulla e due correnti uguali ed opposte. Quindi ad ogni istante vengono alimentate due fasi. Ciò viene ottenuto chiudendo in sequenza coppie di interruttori, uno superiore ed uno inferiore, appartenenti a fasi diverse. Per sincronizzare l’alimentazione delle fasi con il tratto costante delle FEM è necessario usare un sensore di posizione. In pratica si utilizza un sensore composto da tre sonde ad effetto Hall che vengono investite dal flusso dei magneti permanenti.

Azionamenti DC Brushless
Controllo di corrente ad isteresi

Azionamenti DC Brushless
Controllo di corrente ad isteresi

Motori Stepper (o a passo)
Strutture
Variable Reluctance Permanent Magnet Ibrido
Caratteristiche
• Ruotano di un angolo fisso ad ogni impulso di corrente
• Controllo della posizione ad anello aperto
• Coppia nominale allo spunto
• Robustezza
• Facile interfacciamento con circuiti digitali
• Vasto range di velocità (0-4000 rpm)
Svantaggi
• Basso rendimento (limita la taglia)
• Possibili risonanze
• Difficoltà ad operare ad alte velocità

Motori Stepper (o a passo)
Motore a passo con incrementi di 60° (2/3)
Hp. Coppia di carico inferiore alla coppia motrice
• Alimentando la fase A si forza il rotore ad allinearsi con la stessa • Se si apre la fase A e si alimenta la fase B il rotore compie un passo di 60° • Alimentando le fasi con sequenza ABC il rotore ruota in senso orario • Alimentando le fasi con sequenza ACB il rotore ruota in senso antiorario • Mantenendo alimentata l’ultima fase cronologicamente attivata il motore mantiene l’ultima
posizione assunta (Holding torque)

Motori Stepper (o a passo)
Modo di funzionamento START-STOP
Il motore può essere avviato e fermato istantaneamente

Motori Stepper (o a passo)
Coppia di Pull-over = coppia massima sviluppata dal motore nel passaggio da una posizione alla
successiva

Motori Stepper (o a passo)
Modo di funzionamento SLEWING
• La velocità non riparte da zero all’inizio di ogni ciclo • A regime la velocità è quasi costante, la coppia d’inerzia è quindi trascurabile ed è possibile
sopportare un carico maggiore, rispetto alla modalità Start-Stop, senza perdere il passo. • Il motore deve essere avviato e fermato gradualmente per evitare la perdita del passo

Motori Stepper (o a passo)
Caratteristica elettromeccanica
• Start-Stop Region – regione di funzionamento in modalità Start-Stop
• Slew Region – regione di funzionamento in modalità Slewing
• Coppia di Pull-in – massima coppia di carico consentita in funzionamento Start-Stop e massimo valore di carico che consente l’avvio o la fermata istantanea del motore senza perdita di passo.
• Maximum Start Rate – Massima frequenza degli impulsi che consente l’avviamento del motore senza carico
• Coppia di Pull-out – massima coppia di carico consentita per non perdere il passo
• Maximum Slew Rate - Massima frequenza degli impulsi che consente il funzionamento del motore senza carico

Motori Stepper (o a passo)
Avvolgimento Bipolare

Motori Stepper (o a passo)
Avvolgimento Unipolare

Motori Stepper (o a passo)
Modalità - Wave Switching Sequenze (avvolgimento bipolare)

Motori Stepper (o a passo)
Modalità - Normal Switching Sequence (avvolgimento bipolare)

Motori Stepper (o a passo) Modalità – Halfstepping (avvolgimento bipolare)

Motori Stepper (o a passo)
Modalità - Microstepping





























