Embed Size (px)
Citation preview
2 DINAMICA DE UNA PARTICULA
BERNARDO ARENAS GAVIRIAUniversidad de Antioquia
Instituto de Física
2010


Índice general
2. Dinámica de una partícula 12.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12.2. Momento lineal o cantidad de movimiento (p) . . . . . . . . . . . . . . . . . . . . . . 3
2.2.1. Conservación del momento lineal . . . . . . . . . . . . . . . . . . . . . . . . . 42.3. Leyes de Newton del movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.1. Primera ley de Newton o ley de inercia . . . . . . . . . . . . . . . . . . . . . . 62.3.2. Segunda ley de Newton o ley de fuerza . . . . . . . . . . . . . . . . . . . . . . 82.3.3. Fuerza neta o resultante de un sistema de fuerzas concurrentes . . . . . . . . 102.3.4. Resultante de un sistema de fuerzas utilizando componentes rectangulares . 102.3.5. Tercera ley de Newton o ley de acción-reacción . . . . . . . . . . . . . . . . . . 112.3.6. Equilibrio de una partícula . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4. Fuerza de fricción entre superficies en contacto . . . . . . . . . . . . . . . . . . . . . . 162.5. Fuerza de fricción en fluidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.6. Fuerza elástica de un resorte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.7. Dinámica del movimiento curvilíneo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7.1. Dinámica del movimiento circular . . . . . . . . . . . . . . . . . . . . . . . . . 252.7.2. Movimiento curvilíneo en componentes rectangulares . . . . . . . . . . . . . 27
2.8. Vector momento angular de una partícula . . . . . . . . . . . . . . . . . . . . . . . . . 272.8.1. Variación del vector momento angular con el tiempo . . . . . . . . . . . . . . 282.8.2. Conservación del momento angular y fuerzas centrales . . . . . . . . . . . . . 29
2.9. *Sistemas de masa variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3

Capı́tulo 2Dinámica de una partícula
ObjetivosEn esta unidad se busca que el estudiante
Identifique y defina el concepto de vectormomento lineal.
Distinga entre sistema aislado y sistema noaislado.
Identifique la relación entre interaccióny cambio en el momento lineal de unapartícula.
Analice el principio de conservación delvector momento lineal total de un sistemaaislado.
Enuncie y exprese matemáticamente lasleyes de Newton.
Relacione las leyes de Newton con los con-ceptos de: inercia, fuerza y acción a distan-cia.
Obtenga la fuerza neta que actúa sobre unapartícula.
Analice y resuelva situaciones de equilibriode una partícula.
Descubra los efectos de la fuerza de fricciónsobre el movimiento de los cuerpos.
Infiera la diferencia entre los diferentestipos de fricción.
Enuncie y opere adecuadamente la ley deHooke.
Aplique correctamente las leyes de Newtontanto en el movimiento rectilíneo, como enel movimiento curvilíneo de una partícula.
Identificar las componentes tangencial ynormal de la fuerza, como las causas delcambio en el estado de los cuerpos.
Aplicar las leyes de Newton al movimientocircular de partículas.
Defina el concepto de vector momento an-gular de una partícula en movimiento.
Analice la variación del vector momentoangular con el tiempo, para una partículaen movimiento.
Analice situaciones físicas en las cuales seconserva el vector momento angular deuna partícula.
CONCEPTOS BASICOSEn esta unidad de dinámica de una partícula, sedefinirán los siguientes conceptos que son bási-cos en el estudio del movimiento de los cuerpos:Sistema, cuerpo o cuerpos de interés, medio am-biente o alrededores, momento lineal (p), iner-cia, vector fuerza F), par acción-reacción, equili-brio, fricción, fuerza elástica, fuerza tangencial(FT), fuerza normal (FN),momento angular (L).
2.1. Introducción
En esta unidad se inicia el estudio de la segundaparte de la mecánica, denominada dinámica, en
2 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
la cual se consideran las causas por las que cam-bia el estado de reposo ó de movimiento de uncuerpo, cuando este interactúa con otros cuer-pos.
Para su estudio, se dispone de los conceptoscinemáticos descritos y analizados en la unidadanterior. Igual que en la cinemática, sólo se con-sidera el movimiento de traslación de los cuer-pos, o sea, que estos se pueden tratar bajo elmodelo de partícula, de ahí el nombre de launidad.
Cuando se va a analizar el comportamientodinámico de un cuerpo, lo primero que se hacees llevar a cabo los siguientes pasos:
Definir un sistema, que generalmente estáformado por varios cuerpos.
Elegir, del sistema, el cuerpo al cual se le vaa analizar el movimiento, es decir, el cuerpoo partícula de interés.
Delimitar el medio ambiente o alrededores, for-mado por el resto del sistema, o sea, porlos cuerpos cercanos que interactúan con elcuerpo de interés.
Para aclarar los pasos anteriores, se conside-ran las siguientes situaciones
1. Sistema cuerpo-tierra: Proyectil que se lanzadesde el punto A con una velocidad queforma un ángulo con la horizontal.
En el sistema de la figura 2.1, tomando elproyectil como cuerpo o partícula de in-terés, los alrededores lo conforman el airey la tierra.
A
vo
Tierra
q
Figura 2.1: Proyectil lanzado desde el punto A.
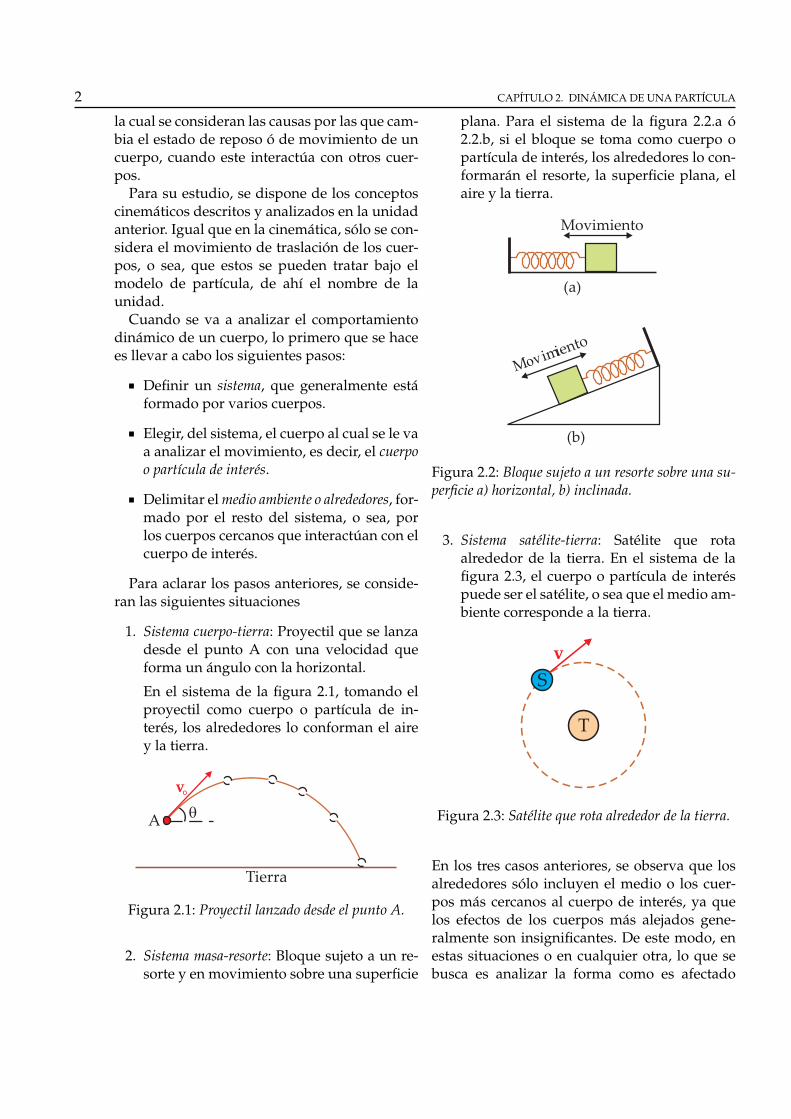
2. Sistema masa-resorte: Bloque sujeto a un re-sorte y en movimiento sobre una superficie
plana. Para el sistema de la figura 2.2.a ó2.2.b, si el bloque se toma como cuerpo opartícula de interés, los alrededores lo con-formarán el resorte, la superficie plana, elaire y la tierra.
(a)
(b)
Movimiento
Mov imiento
Figura 2.2: Bloque sujeto a un resorte sobre una su-perficie a) horizontal, b) inclinada.
3. Sistema satélite-tierra: Satélite que rotaalrededor de la tierra. En el sistema de lafigura 2.3, el cuerpo o partícula de interéspuede ser el satélite, o sea que el medio am-biente corresponde a la tierra.
T
v
S
Figura 2.3: Satélite que rota alrededor de la tierra.
En los tres casos anteriores, se observa que losalrededores sólo incluyen el medio o los cuer-pos más cercanos al cuerpo de interés, ya quelos efectos de los cuerpos más alejados gene-ralmente son insignificantes. De este modo, enestas situaciones o en cualquier otra, lo que sebusca es analizar la forma como es afectado

2.2. MOMENTO LINEAL O CANTIDAD DE MOVIMIENTO (P) 3
el movimiento de traslación del cuerpo de in-terés por los alrededores. Así, el movimientodel cuerpo queda determinado por la acción delmedio ambiente sobre él.
Como se verá en lo que sigue, el objetivo úl-timo de la dinámica es poder predecir, en unproblema mecánico específico, cómo se seguirámoviendo una partícula cuando sus alrede-dores y condiciones iniciales se conocen. Unavez realizado lo anterior, se dice que se ha re-suelto completamente el problema dinámico, loque matemáticamente equivale a conocer la for-ma como varía el vector posición con el tiempo,es decir, conocer la forma explícita de r(t).
2.2. Momento lineal o cantidad demovimiento (p)
Antes de analizar las leyes de movimiento oleyes de Newton, es necesario hacer referenciaa las cantidades dinámicas masa y momento li-neal que son el punto de partida de la mayoríade los conceptos que se tratarán en adelante.
La física dispone de una cantidad escalarque es característica o propia de cada cuerpo yla cual permite conectar la cinemática de unapartícula con la dinámica de una partícula; es-ta propiedad de los cuerpos es su masa. En loque sigue, no se hace una definición operacionalde la masa, sino que en su lugar se emplea elconcepto intuitivo que de ella se tiene, esto es,lo que marca una balanza cuando un cuerpo secoloca sobre ella.
La masa de un cuerpo, que se representa me-diante los símbolos M o m, es una cantidad fun-damental cuya dimensión es M. De acuerdo conesta dimensión, las unidades respectivas son: elkilogramo (kg) en el sistema de unidades SI, y elgramo (g) en el sistema gaussiano de unidades.En el sistema inglés la unidad de masa es elslug, que se definirá más adelante.
La equivalencia entre estas unidades está da-da por la identidad: 1kg ≡ 103g.
La primera cantidad dinámica a definir, es elmomento lineal o cantidad de movimiento, que esde gran importancia en la física ya que permiteobtener más información que la velocidad.
O
p
m
y
x
Figura 2.4: Momento lineal de una partícula.
Cuando una partícula de masa m, posee unavelocidad v respecto a determinado observador,se dice que su vector momento lineal está dadopor
p ≡ mv. (2.1)
De acuerdo con la definición dada por laecuación (2.1), se tiene que el momento lineal esuna cantidad vectorial que apunta en la mismadirección del vector velocidad, como se ilustraen la figura 2.4.
Además, como la velocidad depende del sis-tema de referencia, entonces el momento linealtambién depende del sistema de referencia.Igualmente, como la velocidad es tangente a latrayectoria descrita por la partícula, el momen-to lineal también es tangente a la trayectoriaque la partícula describe.
Dimensiones y unidades del vector momentolinealDe acuerdo con la definición de momento li-neal, se tiene que sus dimensiones son igualesa la dimensión de masa por la dimensión develocidad, es decir [p] = [m][v] = MLT−1 .Por lo tanto, las unidades en los respectivos sis-temas están dadas por: kg · m · s−1 en el sistemaSI de unidades, g · cm · s−1 en el sistema gaus-siano de unidades y lb · s en el sistema inglés deunidades.
En el ejemplo 2.1, se ilustra el hecho que elmomento lineal permite obtener mayor infor-mación que la velocidad.
Ejemplo 2.1.Los cuerpos de la figura 2.5, que tienen
4 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
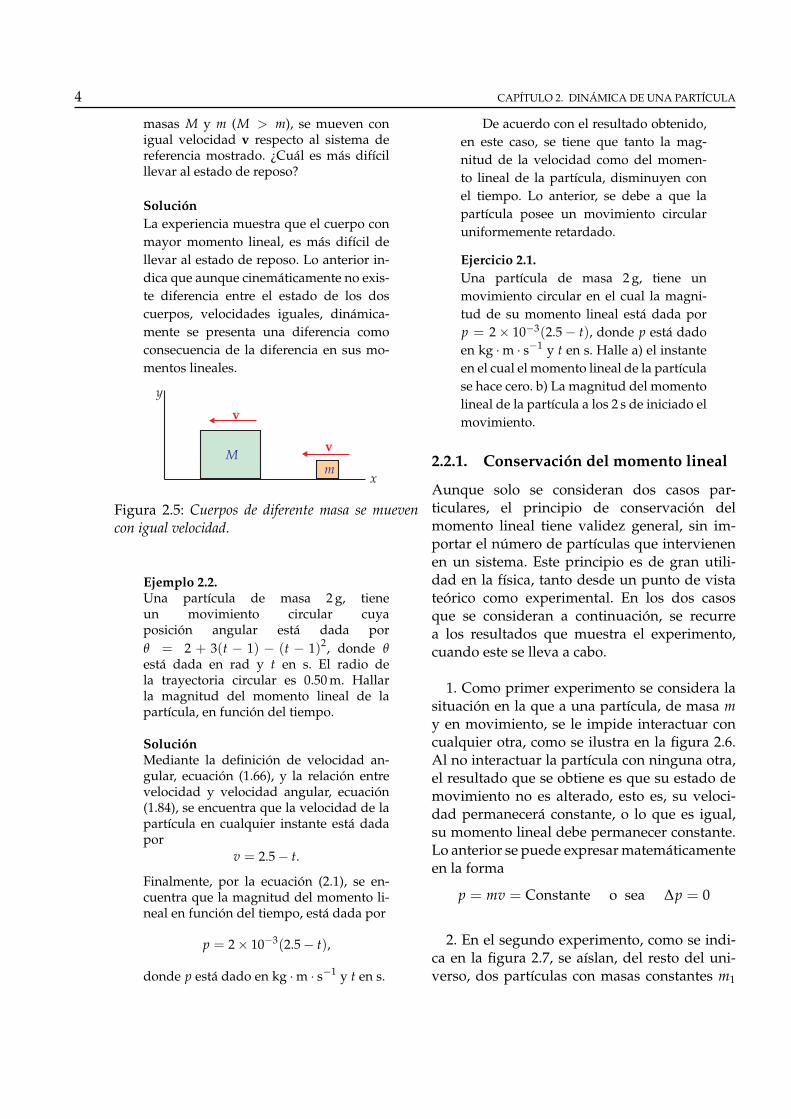
masas M y m (M > m), se mueven conigual velocidad v respecto al sistema dereferencia mostrado. ¿Cuál es más difícilllevar al estado de reposo?
SoluciónLa experiencia muestra que el cuerpo conmayor momento lineal, es más difícil dellevar al estado de reposo. Lo anterior in-dica que aunque cinemáticamente no exis-te diferencia entre el estado de los doscuerpos, velocidades iguales, dinámica-mente se presenta una diferencia comoconsecuencia de la diferencia en sus mo-mentos lineales.
Mm
y
x
v
v
Figura 2.5: Cuerpos de diferente masa se muevencon igual velocidad.
Ejemplo 2.2.Una partícula de masa 2 g, tieneun movimiento circular cuyaposición angular está dada porθ = 2 + 3(t − 1) − (t − 1)2, donde θestá dada en rad y t en s. El radio dela trayectoria circular es 0.50 m. Hallarla magnitud del momento lineal de lapartícula, en función del tiempo.
SoluciónMediante la definición de velocidad an-gular, ecuación (1.66), y la relación entrevelocidad y velocidad angular, ecuación(1.84), se encuentra que la velocidad de lapartícula en cualquier instante está dadapor
v = 2.5 − t.
Finalmente, por la ecuación (2.1), se en-cuentra que la magnitud del momento li-neal en función del tiempo, está dada por
p = 2 × 10−3(2.5 − t),
donde p está dado en kg · m · s−1 y t en s.
De acuerdo con el resultado obtenido,en este caso, se tiene que tanto la mag-nitud de la velocidad como del momen-to lineal de la partícula, disminuyen conel tiempo. Lo anterior, se debe a que lapartícula posee un movimiento circularuniformemente retardado.
Ejercicio 2.1.Una partícula de masa 2 g, tiene unmovimiento circular en el cual la magni-tud de su momento lineal está dada porp = 2 × 10−3(2.5 − t), donde p está dadoen kg · m · s−1 y t en s. Halle a) el instanteen el cual el momento lineal de la partículase hace cero. b) La magnitud del momentolineal de la partícula a los 2 s de iniciado elmovimiento.
2.2.1. Conservación del momento lineal
Aunque solo se consideran dos casos par-ticulares, el principio de conservación delmomento lineal tiene validez general, sin im-portar el número de partículas que intervienenen un sistema. Este principio es de gran utili-dad en la física, tanto desde un punto de vistateórico como experimental. En los dos casosque se consideran a continuación, se recurrea los resultados que muestra el experimento,cuando este se lleva a cabo.
1. Como primer experimento se considera lasituación en la que a una partícula, de masa my en movimiento, se le impide interactuar concualquier otra, como se ilustra en la figura 2.6.Al no interactuar la partícula con ninguna otra,el resultado que se obtiene es que su estado demovimiento no es alterado, esto es, su veloci-dad permanecerá constante, o lo que es igual,su momento lineal debe permanecer constante.Lo anterior se puede expresar matemáticamenteen la forma
p = mv = Constante o sea ∆p = 0
2. En el segundo experimento, como se indi-ca en la figura 2.7, se aíslan, del resto del uni-verso, dos partículas con masas constantes m1

2.2. MOMENTO LINEAL O CANTIDAD DE MOVIMIENTO (P) 5
v
m
Figura 2.6: Conservación del momento lineal de unapartícula aislada.
y m2. Decir que se aíslan del resto del universo,equivale a afirmar que sólo se permiten sus in-teracciones mutuas. A un sistema como este sele llama sistema aislado.
v1
m1
v2
m2
t
t>t'm
1
m2
v1'
v2'
Figura 2.7: Momento lineal de dos partículas ais-ladas.
Cuando a las partículas se les permite in-teractuar entre sí, se encuentra que sus mo-mentos lineales individuales pueden cambiar altranscurrir el tiempo. Por otro lado, el momen-to lineal total del sistema formado por las dospartículas, en cualquier instante, está dado porla suma de los momentos lineales de las partícu-las. De acuerdo con lo anterior, en el instante tel momento lineal del sistema aislado, está dadopor
P = p1 + p2
= m1v1 + m2v2, (2.2)
y en el instante posterior t′ por
P′ = p′1 + p′
2
= m1v′1 + m2v′
2. (2.3)
Cuando se realiza este experimento, se encuen-tra que independientemente de los valores det y t′, el momento lineal total del sistema per-manece constante, o sea,
P = P′ (2.4)
Como la ecuación (2.4) es válida para cualquiernúmero de partículas que conformen el sistema,se puede enunciar el principio de conservacióndel momento lineal, en la forma: El momento li-neal total de un sistema aislado de partículas, per-manece constante.
De este modo, el momento lineal ganado(perdido) por una partícula, es perdido (gana-do) por el resto del sistema.
Para la situación que interesa en este momen-to, se tiene que el momento lineal ganado (o per-dido) por una partícula, es perdido (o ganado)por la otra partícula; así, al reemplazar las ecua-ciones (2.2) y (2.3) en la ecuación (2.4) se tiene
p1 + p2 = p′1 + p′
2
= Constante,
o lo que es igual
∆p1 = −∆p2, (2.5)
de donde, el momento lineal que gana unapartícula es igual al momento lineal que pierdela otra.
Como consecuencia de este resultado, devalidez general, el cambio en el momento linealde una partícula se debe a su interacción conotra u otras partículas. En conclusión, toda in-teracción entre partículas genera cambios en sus mo-mentos lineales individuales.
A diario se presentan situaciones en las que semanifiesta la conservación del momento lineal.Por ejemplo, cuando un rifle en reposo respec-to a la tierra es disparado, se observa que el ri-fle retrocede. Este retroceso es una consecuenciadel principio de conservación del momento li-neal, ya que en este caso, el momento lineal totaldel sistema inmediatamente antes del disparo einmediatamente después del disparo, debe sernulo.
6 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
2.3. Leyes de Newton delmovimiento
En esta sección, se consideran las leyes querigen el cambio en el estado de reposo o demovimiento de un cuerpo. A partir de ellas ycon ayuda de los conceptos vistos en la unidadde cinemática de una partícula, es posible lle-gar a conocer la forma como varía la posiciónde una partícula con el tiempo [r(t)].
2.3.1. Primera ley de Newton o ley deinercia
De acuerdo con la situación considerada en elprimer experimento de la sección 2.2.1, todocuerpo permanecerá en estado de reposo (mo-mento lineal cero) o de movimiento rectilíneouniforme (momento lineal constante), mientrasningún otro cuerpo interactúe con él, o lo que esigual, mientras ningún otro cuerpo lo obliguea cambiar dicho estado; cinemáticamente, estosignifica que su aceleración es cero. Cuando sepresenta una de estas dos situaciones, se diceque el cuerpo se encuentra en equilibrio mecánicoy se habla de equilibrio estático si el cuerpo estáen reposo, y de equilibrio dinámico o cinético si elcuerpo tiene movimiento rectilíneo uniforme.
También puede ocurrir que un cuerpo, inte-ractuando con otros cuerpos, permanezca en es-tado de equilibrio. En este caso, se presenta unasituación en la cual las interacciones se anulanentre sí, en otras palabras, el efecto de todas lasinteracciones es nulo. Por ejemplo, una lámparasuspendida del techo mediante una cuerda, sepuede encontrar en estado de equilibrio estáti-co, aunque interactúa simultáneamente con lacuerda y la tierra.
En lenguaje matemático, las situaciones con-sideradas anteriormente se pueden expresar enla forma
v = 0 v = Constante, es decir a = 0.
Esta es la forma matemática de expresar laprimera ley de Newton, también conocida co-mo la ley de inercia, que en palabras se puedeenunciar en la forma:
Todo cuerpo permanecerá en un estado deequilibrio mecánico, mientras no interactúe conningún otro cuerpo.
Como el movimiento de un cuerpo dependedel observador, esta ley es prácticamente unenunciado relativo a sistemas de referencia,ya que al enunciarla hay que especificar res-pecto a cuál sistema de referencia la partícu-la se encuentra en estado de reposo o demovimiento rectilíneo uniforme. Se supone queel movimiento de la partícula, está relacionadoa un observador sobre el cual la aceleración escero; a tal observador se le denomina observadorinercial y a su sistema, sistema de referencia iner-cial.
Se acostumbra definir un sistema de refe-rencia inercial, como aquel que se encuentraen reposo o con movimiento rectilíneo uni-forme respecto a la tierra, ya que esta setoma aproximadamente como un sistema dereferencia inercial. La aceleración normal dela tierra alrededor del sol es del orden de4.4 × 10−3 m · s−2 dirigida hacia el sol, mientrasque un punto en el ecuador terrestre, debido ala rotación de la tierra sobre su eje es del ordende 3.37 × 10−2 m · s−2 Como consecuencia deesta definición, se tiene que todo sistema dereferencia en reposo o con un movimientorectilíneo uniforme, respecto a un sistema dereferencia inercial, también es un sistema dereferencia inercial.
En síntesis: La ley de inercia únicamentees válida respecto a sistemas de referenciainerciales.
Pregunta :¿Por qué se dice que la tierra se compor-ta aproximadamente como un sistema dereferencia inercial?
A los sistemas de referencia con aceleracióndiferente de cero, se les conoce como sistemasde referencia acelerados o sistemas de referencia noinerciales. Respecto a estos sistemas, no tienevalidez la ley de inercia.
2.3. LEYES DE NEWTON DEL MOVIMIENTO 7
A continuación se consideran situaciones co-munes, en las que se manifiesta la ley de inercia.
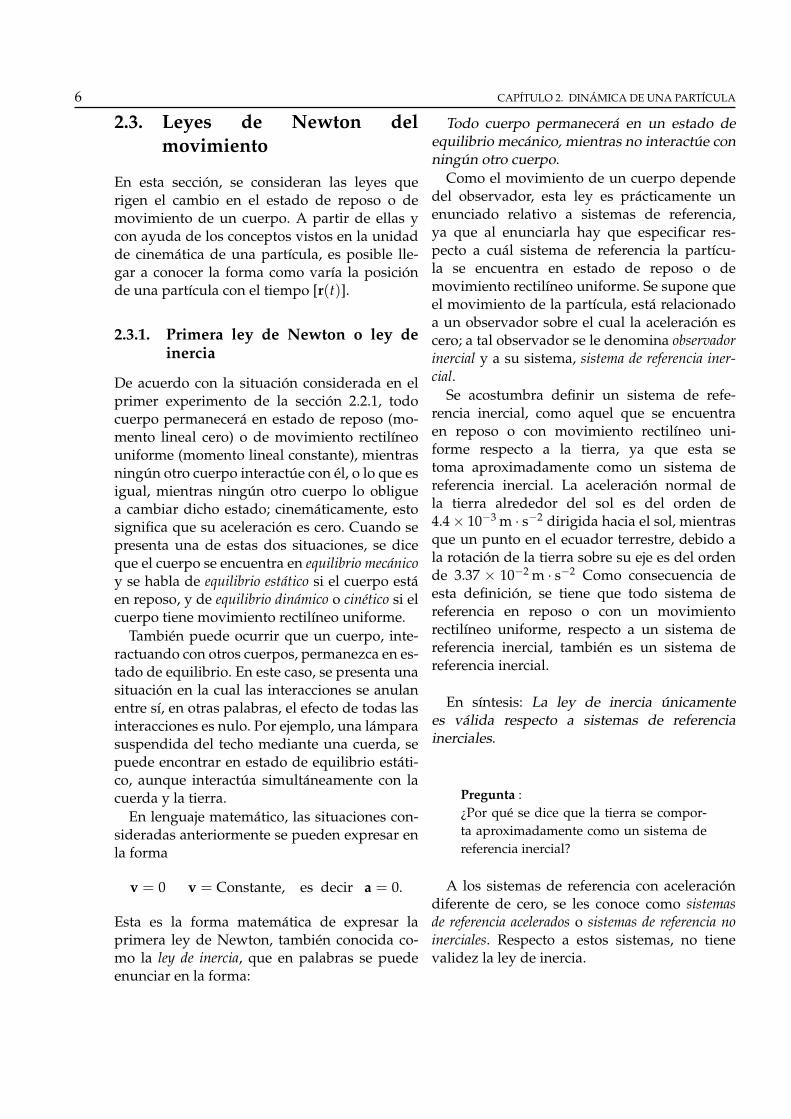
1. En la figura 2.8, se muestra un cuerpo enreposo respecto a una superficie horizontal.
O
v= 0
y
x
Figura 2.8: Cuerpo en reposo sobre una superficiehorizontal.
Como el cuerpo está en reposo respecto alpiso, su aceleración es cero. Necesariamente, elcuerpo permanecerá en reposo mientras ningúnotro cuerpo interactúe con él, obligándolo acambiar de estado.
Si el cuerpo corresponde a un auto con suspasajeros, cuando este arranca, los pasajerosejercen presión sobre el espaldar de su silla, yaque por la ley de inercia tienen una rapidezmenor (cero) en el instante que acelera.
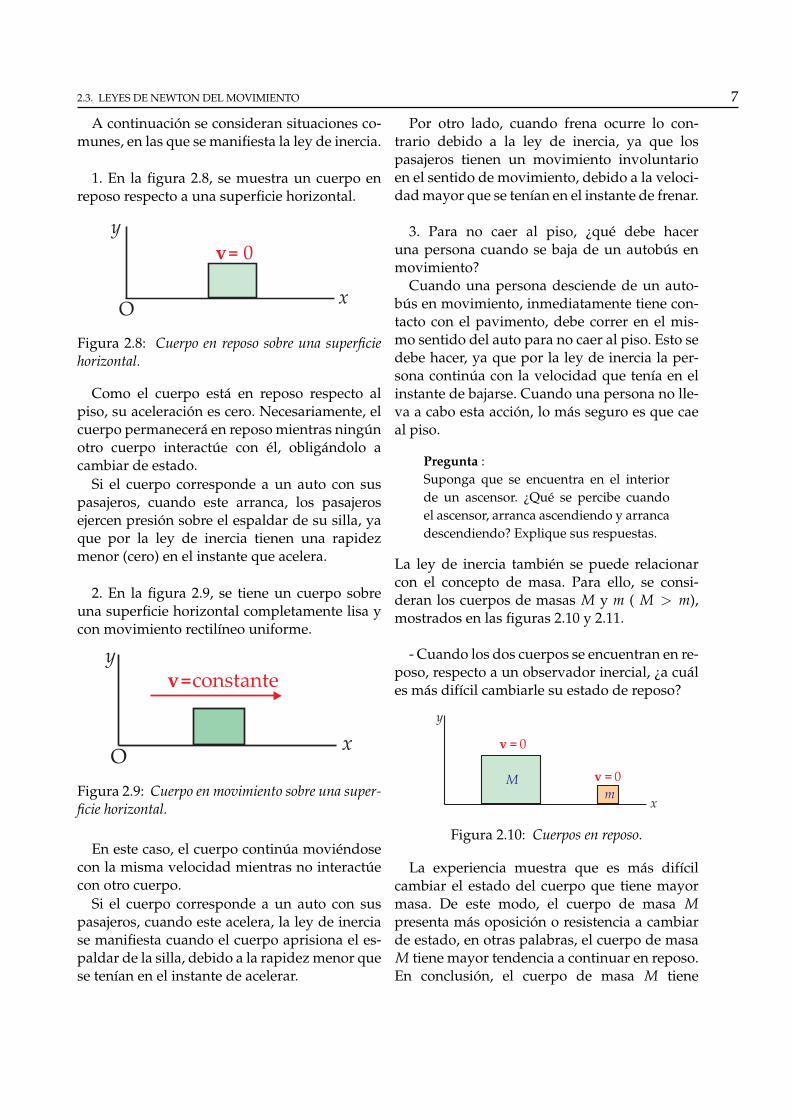
2. En la figura 2.9, se tiene un cuerpo sobreuna superficie horizontal completamente lisa ycon movimiento rectilíneo uniforme.
O
v=constante
y
x
Figura 2.9: Cuerpo en movimiento sobre una super-ficie horizontal.
En este caso, el cuerpo continúa moviéndosecon la misma velocidad mientras no interactúecon otro cuerpo.
Si el cuerpo corresponde a un auto con suspasajeros, cuando este acelera, la ley de inerciase manifiesta cuando el cuerpo aprisiona el es-paldar de la silla, debido a la rapidez menor quese tenían en el instante de acelerar.
Por otro lado, cuando frena ocurre lo con-trario debido a la ley de inercia, ya que lospasajeros tienen un movimiento involuntarioen el sentido de movimiento, debido a la veloci-dad mayor que se tenían en el instante de frenar.
3. Para no caer al piso, ¿qué debe haceruna persona cuando se baja de un autobús enmovimiento?
Cuando una persona desciende de un auto-bús en movimiento, inmediatamente tiene con-tacto con el pavimento, debe correr en el mis-mo sentido del auto para no caer al piso. Esto sedebe hacer, ya que por la ley de inercia la per-sona continúa con la velocidad que tenía en elinstante de bajarse. Cuando una persona no lle-va a cabo esta acción, lo más seguro es que caeal piso.
Pregunta :Suponga que se encuentra en el interiorde un ascensor. ¿Qué se percibe cuandoel ascensor, arranca ascendiendo y arrancadescendiendo? Explique sus respuestas.
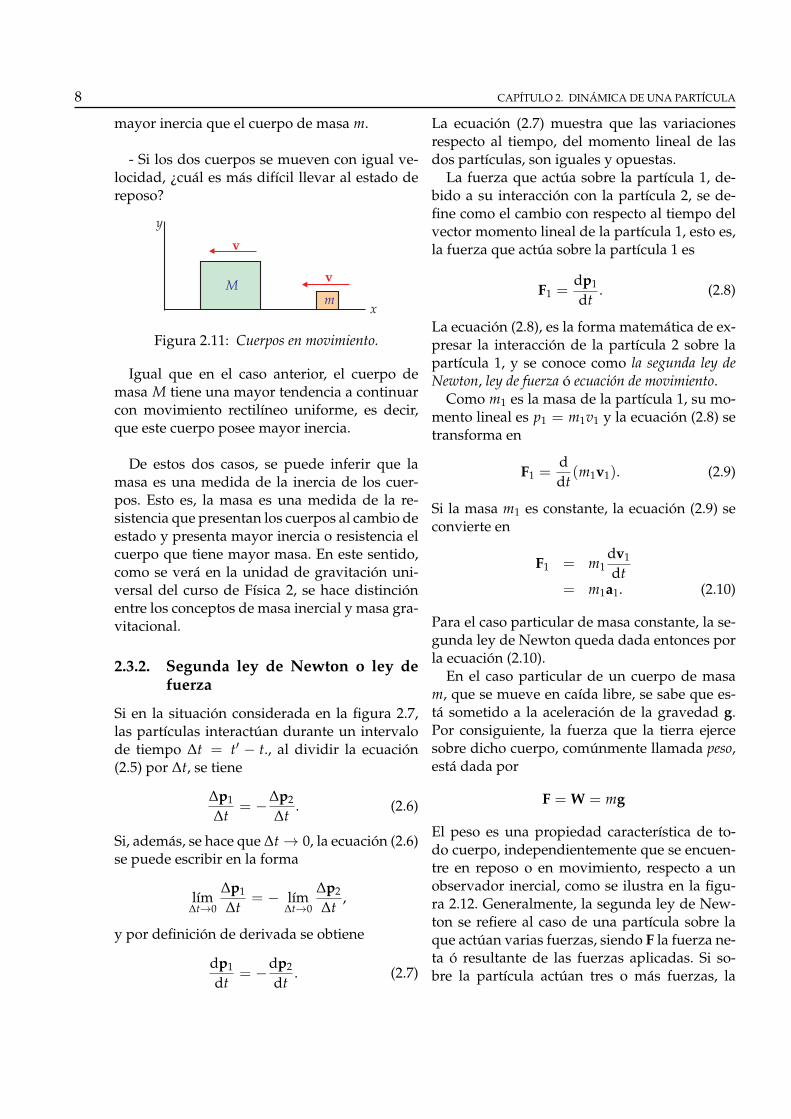
La ley de inercia también se puede relacionarcon el concepto de masa. Para ello, se consi-deran los cuerpos de masas M y m ( M > m),mostrados en las figuras 2.10 y 2.11.
- Cuando los dos cuerpos se encuentran en re-poso, respecto a un observador inercial, ¿a cuáles más difícil cambiarle su estado de reposo?
Mm
y
x
v = 0
v = 0
Figura 2.10: Cuerpos en reposo.
La experiencia muestra que es más difícilcambiar el estado del cuerpo que tiene mayormasa. De este modo, el cuerpo de masa Mpresenta más oposición o resistencia a cambiarde estado, en otras palabras, el cuerpo de masaM tiene mayor tendencia a continuar en reposo.En conclusión, el cuerpo de masa M tiene
8 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
mayor inercia que el cuerpo de masa m.
- Si los dos cuerpos se mueven con igual ve-locidad, ¿cuál es más difícil llevar al estado dereposo?
Mm
y
x
v
v
Figura 2.11: Cuerpos en movimiento.
Igual que en el caso anterior, el cuerpo demasa M tiene una mayor tendencia a continuarcon movimiento rectilíneo uniforme, es decir,que este cuerpo posee mayor inercia.
De estos dos casos, se puede inferir que lamasa es una medida de la inercia de los cuer-pos. Esto es, la masa es una medida de la re-sistencia que presentan los cuerpos al cambio deestado y presenta mayor inercia o resistencia elcuerpo que tiene mayor masa. En este sentido,como se verá en la unidad de gravitación uni-versal del curso de Física 2, se hace distinciónentre los conceptos de masa inercial y masa gra-vitacional.
2.3.2. Segunda ley de Newton o ley defuerza
Si en la situación considerada en la figura 2.7,las partículas interactúan durante un intervalode tiempo ∆t = t′ − t., al dividir la ecuación(2.5) por ∆t, se tiene
∆p1
∆t= −∆p2
∆t. (2.6)
Si, además, se hace que ∆t → 0, la ecuación (2.6)se puede escribir en la forma
lı́m∆t→0
∆p1
∆t= − lı́m
∆t→0
∆p2
∆t,
y por definición de derivada se obtiene
dp1
dt= −dp2
dt. (2.7)
La ecuación (2.7) muestra que las variacionesrespecto al tiempo, del momento lineal de lasdos partículas, son iguales y opuestas.
La fuerza que actúa sobre la partícula 1, de-bido a su interacción con la partícula 2, se de-fine como el cambio con respecto al tiempo delvector momento lineal de la partícula 1, esto es,la fuerza que actúa sobre la partícula 1 es
F1 =dp1
dt. (2.8)
La ecuación (2.8), es la forma matemática de ex-presar la interacción de la partícula 2 sobre lapartícula 1, y se conoce como la segunda ley deNewton, ley de fuerza ó ecuación de movimiento.
Como m1 es la masa de la partícula 1, su mo-mento lineal es p1 = m1v1 y la ecuación (2.8) setransforma en
F1 =ddt
(m1v1). (2.9)
Si la masa m1 es constante, la ecuación (2.9) seconvierte en
F1 = m1dv1
dt= m1a1. (2.10)
Para el caso particular de masa constante, la se-gunda ley de Newton queda dada entonces porla ecuación (2.10).
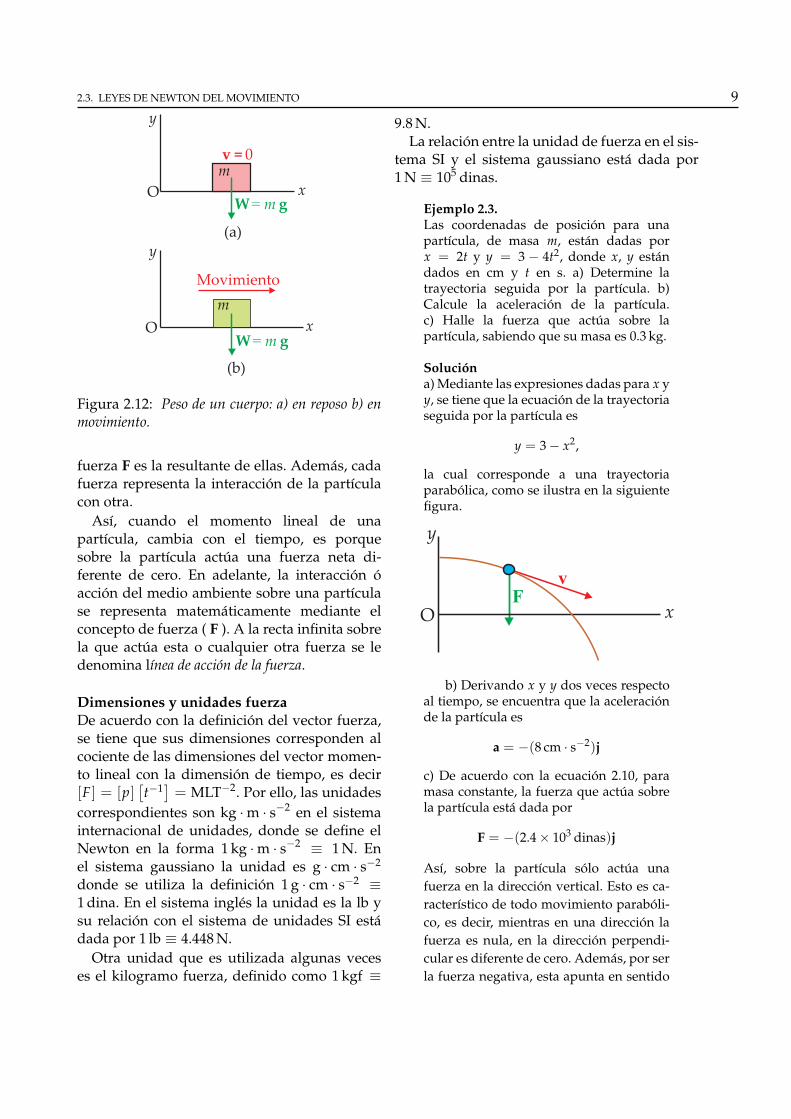
En el caso particular de un cuerpo de masam, que se mueve en caída libre, se sabe que es-tá sometido a la aceleración de la gravedad g.Por consiguiente, la fuerza que la tierra ejercesobre dicho cuerpo, comúnmente llamada peso,está dada por
F = W = mg
El peso es una propiedad característica de to-do cuerpo, independientemente que se encuen-tre en reposo o en movimiento, respecto a unobservador inercial, como se ilustra en la figu-ra 2.12. Generalmente, la segunda ley de New-ton se refiere al caso de una partícula sobre laque actúan varias fuerzas, siendo F la fuerza ne-ta ó resultante de las fuerzas aplicadas. Si so-bre la partícula actúan tres o más fuerzas, la
2.3. LEYES DE NEWTON DEL MOVIMIENTO 9
O
O
(a)
(b)
m
m
Movimiento
W g= m
W g= m
v = 0
y
x
y
x
Figura 2.12: Peso de un cuerpo: a) en reposo b) enmovimiento.
fuerza F es la resultante de ellas. Además, cadafuerza representa la interacción de la partículacon otra.
Así, cuando el momento lineal de unapartícula, cambia con el tiempo, es porquesobre la partícula actúa una fuerza neta di-ferente de cero. En adelante, la interacción óacción del medio ambiente sobre una partículase representa matemáticamente mediante elconcepto de fuerza ( F ). A la recta infinita sobrela que actúa esta o cualquier otra fuerza se ledenomina línea de acción de la fuerza.
Dimensiones y unidades fuerzaDe acuerdo con la definición del vector fuerza,se tiene que sus dimensiones corresponden alcociente de las dimensiones del vector momen-to lineal con la dimensión de tiempo, es decir[F] = [p]
[t−1] = MLT−2. Por ello, las unidades
correspondientes son kg · m · s−2 en el sistemainternacional de unidades, donde se define elNewton en la forma 1 kg · m · s−2 ≡ 1 N. Enel sistema gaussiano la unidad es g · cm · s−2
donde se utiliza la definición 1 g · cm · s−2 ≡1 dina. En el sistema inglés la unidad es la lb ysu relación con el sistema de unidades SI estádada por 1 lb ≡ 4.448 N.
Otra unidad que es utilizada algunas veceses el kilogramo fuerza, definido como 1 kgf ≡
9.8 N.La relación entre la unidad de fuerza en el sis-
tema SI y el sistema gaussiano está dada por1 N ≡ 105 dinas.
Ejemplo 2.3.Las coordenadas de posición para unapartícula, de masa m, están dadas porx = 2t y y = 3 − 4t2, donde x, y estándados en cm y t en s. a) Determine latrayectoria seguida por la partícula. b)Calcule la aceleración de la partícula.c) Halle la fuerza que actúa sobre lapartícula, sabiendo que su masa es 0.3 kg.
Solucióna) Mediante las expresiones dadas para x yy, se tiene que la ecuación de la trayectoriaseguida por la partícula es
y = 3 − x2,
la cual corresponde a una trayectoriaparabólica, como se ilustra en la siguientefigura.
F
v
O
y
x
b) Derivando x y y dos veces respectoal tiempo, se encuentra que la aceleraciónde la partícula es
a = −(8 cm · s−2)j
c) De acuerdo con la ecuación 2.10, paramasa constante, la fuerza que actúa sobrela partícula está dada por
F = −(2.4 × 103 dinas)j
Así, sobre la partícula sólo actúa unafuerza en la dirección vertical. Esto es ca-racterístico de todo movimiento parabóli-co, es decir, mientras en una dirección lafuerza es nula, en la dirección perpendi-cular es diferente de cero. Además, por serla fuerza negativa, esta apunta en sentido
10 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
opuesto a la dirección positiva del eje y,por lo que la concavidad de la parábola eshacia abajo como se muestra en la figuraanterior.
Ejercicio 2.2.Las coordenadas de posición para unapartícula, de masa m, están dadas por x =
2t y y = 3− 4t2, donde x, y están dados encm y t en s. Halle las dimensiones de loscoeficientes numéricos, en las expresionespara x y y.
2.3.3. Fuerza neta o resultante de un sis-tema de fuerzas concurrentes
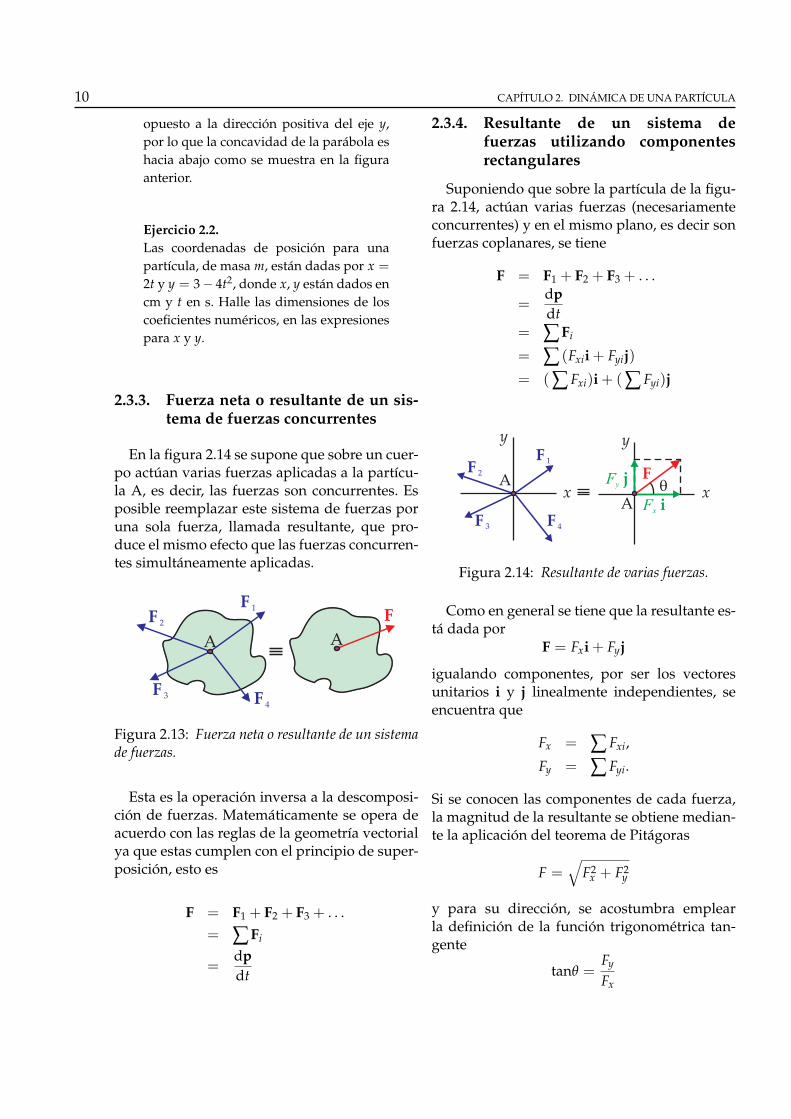
En la figura 2.14 se supone que sobre un cuer-po actúan varias fuerzas aplicadas a la partícu-la A, es decir, las fuerzas son concurrentes. Esposible reemplazar este sistema de fuerzas poruna sola fuerza, llamada resultante, que pro-duce el mismo efecto que las fuerzas concurren-tes simultáneamente aplicadas.
A AF
F4
A A
F
F3
F2
F1
Figura 2.13: Fuerza neta o resultante de un sistemade fuerzas.
Esta es la operación inversa a la descomposi-ción de fuerzas. Matemáticamente se opera deacuerdo con las reglas de la geometría vectorialya que estas cumplen con el principio de super-posición, esto es
F = F1 + F2 + F3 + . . .= ∑ Fi
=dpdt
2.3.4. Resultante de un sistema defuerzas utilizando componentesrectangulares
Suponiendo que sobre la partícula de la figu-ra 2.14, actúan varias fuerzas (necesariamenteconcurrentes) y en el mismo plano, es decir sonfuerzas coplanares, se tiene
F = F1 + F2 + F3 + . . .
=dpdt
= ∑ Fi
= ∑ (Fxii + Fyij)
= (∑ Fxi)i + (∑ Fyi)j
A
F
F4
F3
F2
F1
Ax
y
x
y
Fy j
Fx iq
Figura 2.14: Resultante de varias fuerzas.
Como en general se tiene que la resultante es-tá dada por
F = Fxi + Fyj
igualando componentes, por ser los vectoresunitarios i y j linealmente independientes, seencuentra que
Fx = ∑ Fxi,
Fy = ∑ Fyi.
Si se conocen las componentes de cada fuerza,la magnitud de la resultante se obtiene median-te la aplicación del teorema de Pitágoras
F =√
F2x + F2
y
y para su dirección, se acostumbra emplearla definición de la función trigonométrica tan-gente
tanθ =Fy
Fx
2.3. LEYES DE NEWTON DEL MOVIMIENTO 11
No sobra recordar que la resultante F es física-mente equivalente a las fuerzas F1, F2, F3 yF4aplicadas simultáneamente.
2.3.5. Tercera ley de Newton o ley deacción-reacción
De las ecuaciones (2.7) y (2.8) se tiene que
F1 = −F2 (2.11)
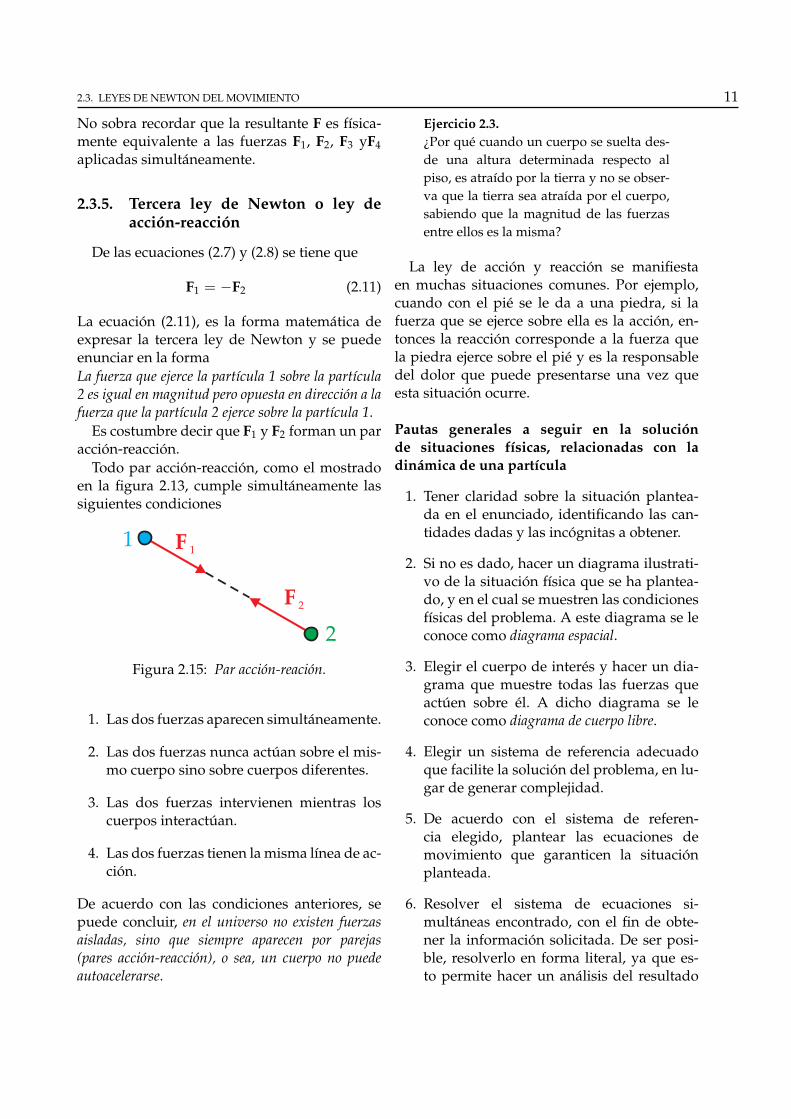
La ecuación (2.11), es la forma matemática deexpresar la tercera ley de Newton y se puedeenunciar en la formaLa fuerza que ejerce la partícula 1 sobre la partícula2 es igual en magnitud pero opuesta en dirección a lafuerza que la partícula 2 ejerce sobre la partícula 1.
Es costumbre decir que F1 y F2 forman un paracción-reacción.
Todo par acción-reacción, como el mostradoen la figura 2.13, cumple simultáneamente lassiguientes condiciones
F1
F2
1
2
Figura 2.15: Par acción-reación.
1. Las dos fuerzas aparecen simultáneamente.
2. Las dos fuerzas nunca actúan sobre el mis-mo cuerpo sino sobre cuerpos diferentes.
3. Las dos fuerzas intervienen mientras loscuerpos interactúan.
4. Las dos fuerzas tienen la misma línea de ac-ción.
De acuerdo con las condiciones anteriores, sepuede concluir, en el universo no existen fuerzasaisladas, sino que siempre aparecen por parejas(pares acción-reacción), o sea, un cuerpo no puedeautoacelerarse.
Ejercicio 2.3.¿Por qué cuando un cuerpo se suelta des-de una altura determinada respecto alpiso, es atraído por la tierra y no se obser-va que la tierra sea atraída por el cuerpo,sabiendo que la magnitud de las fuerzasentre ellos es la misma?
La ley de acción y reacción se manifiestaen muchas situaciones comunes. Por ejemplo,cuando con el pié se le da a una piedra, si lafuerza que se ejerce sobre ella es la acción, en-tonces la reacción corresponde a la fuerza quela piedra ejerce sobre el pié y es la responsabledel dolor que puede presentarse una vez queesta situación ocurre.
Pautas generales a seguir en la soluciónde situaciones físicas, relacionadas con ladinámica de una partícula
1. Tener claridad sobre la situación plantea-da en el enunciado, identificando las can-tidades dadas y las incógnitas a obtener.
2. Si no es dado, hacer un diagrama ilustrati-vo de la situación física que se ha plantea-do, y en el cual se muestren las condicionesfísicas del problema. A este diagrama se leconoce como diagrama espacial.
3. Elegir el cuerpo de interés y hacer un dia-grama que muestre todas las fuerzas queactúen sobre él. A dicho diagrama se leconoce como diagrama de cuerpo libre.
4. Elegir un sistema de referencia adecuadoque facilite la solución del problema, en lu-gar de generar complejidad.
5. De acuerdo con el sistema de referen-cia elegido, plantear las ecuaciones demovimiento que garanticen la situaciónplanteada.
6. Resolver el sistema de ecuaciones si-multáneas encontrado, con el fin de obte-ner la información solicitada. De ser posi-ble, resolverlo en forma literal, ya que es-to permite hacer un análisis del resultado
12 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
y permite verificar si las dimensiones soncorrectas.
7. Dar los resultados numéricos, con lasunidades adecuadas.
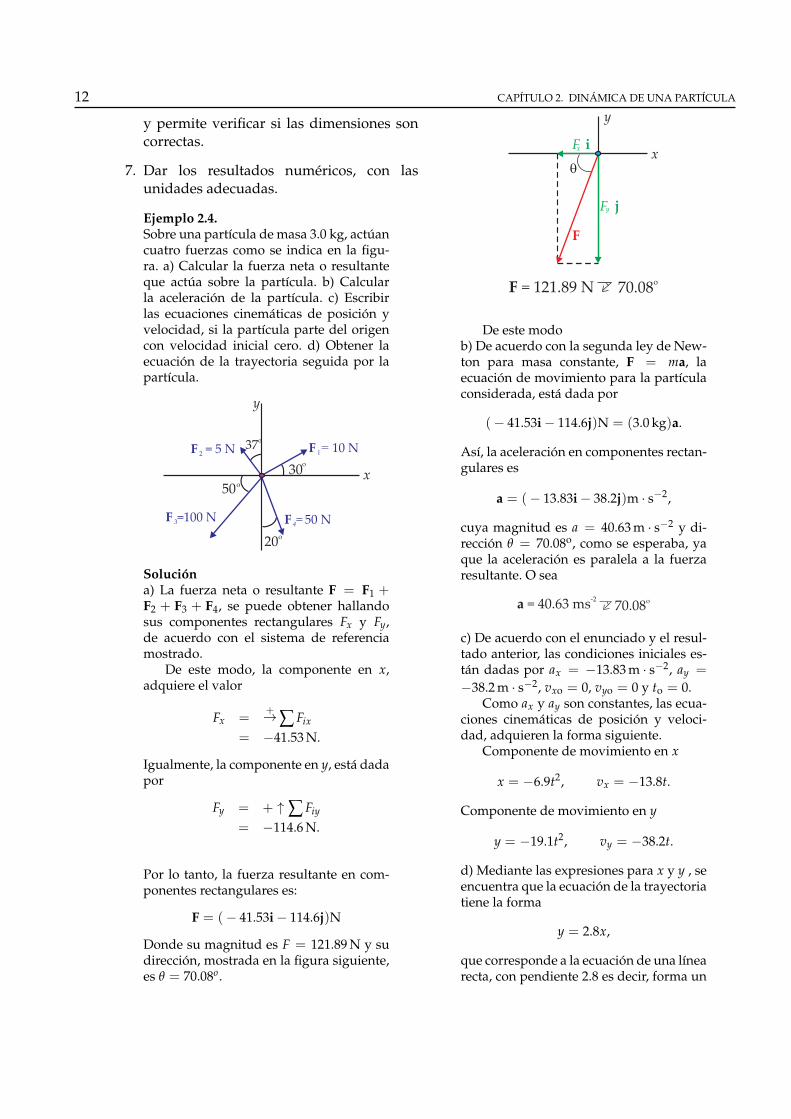
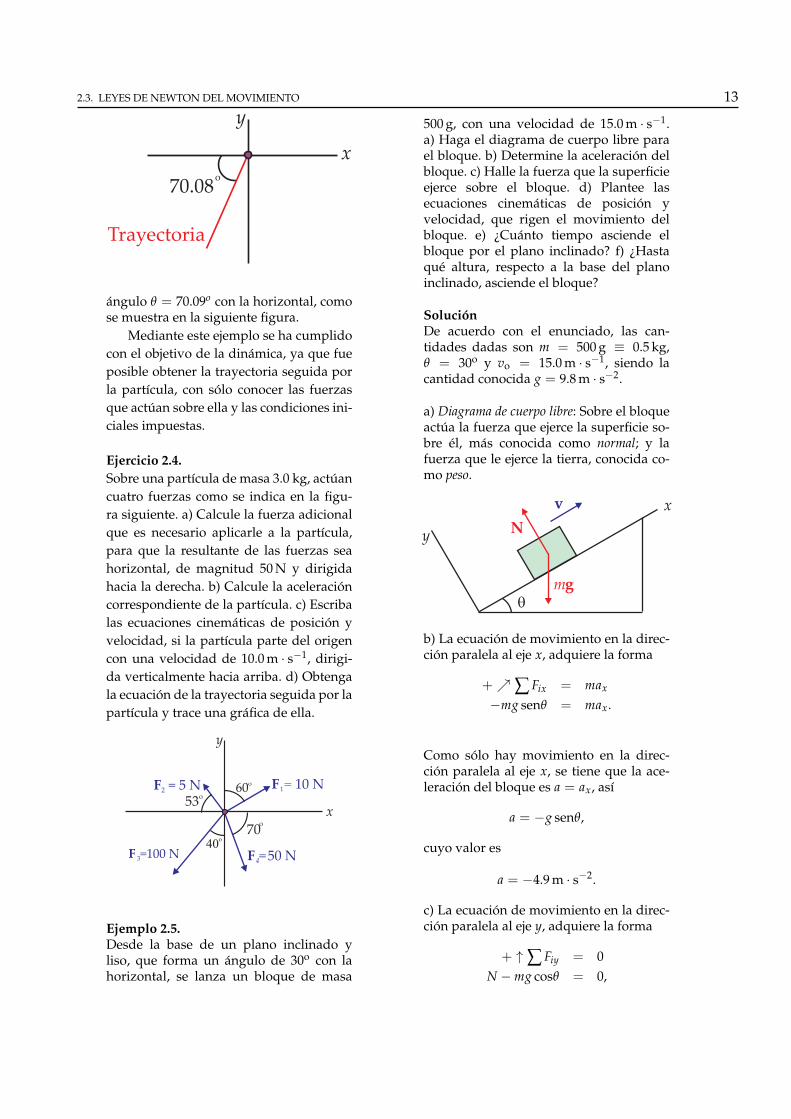
Ejemplo 2.4.Sobre una partícula de masa 3.0 kg, actúancuatro fuerzas como se indica en la figu-ra. a) Calcular la fuerza neta o resultanteque actúa sobre la partícula. b) Calcularla aceleración de la partícula. c) Escribirlas ecuaciones cinemáticas de posición yvelocidad, si la partícula parte del origencon velocidad inicial cero. d) Obtener laecuación de la trayectoria seguida por lapartícula.
F 4= 50 N
F2= 5 N F
1= 10 N
x
y
37o
30o
50o
20o
F3=100 N
Solucióna) La fuerza neta o resultante F = F1 +F2 + F3 + F4, se puede obtener hallandosus componentes rectangulares Fx y Fy,de acuerdo con el sistema de referenciamostrado.
De este modo, la componente en x,adquiere el valor
Fx =+→∑ Fix
= −41.53 N.
Igualmente, la componente en y, está dadapor
Fy = + ↑ ∑ Fiy
= −114.6 N.
Por lo tanto, la fuerza resultante en com-ponentes rectangulares es:
F = (− 41.53i − 114.6j)N
Donde su magnitud es F = 121.89 N y sudirección, mostrada en la figura siguiente,es θ = 70.08o.
x
y
q
F
Fx i
Fy j
F = 121.89 N 70.08o
De este modob) De acuerdo con la segunda ley de New-ton para masa constante, F = ma, laecuación de movimiento para la partículaconsiderada, está dada por
(− 41.53i − 114.6j)N = (3.0 kg)a.
Así, la aceleración en componentes rectan-gulares es
a = (− 13.83i − 38.2j)m · s−2,
cuya magnitud es a = 40.63 m · s−2 y di-rección θ = 70.08o, como se esperaba, yaque la aceleración es paralela a la fuerzaresultante. O sea
a = 40.63 ms-2
70.08o
c) De acuerdo con el enunciado y el resul-tado anterior, las condiciones iniciales es-tán dadas por ax = −13.83 m · s−2, ay =
−38.2 m · s−2, vxo = 0, vyo = 0 y to = 0.Como ax y ay son constantes, las ecua-
ciones cinemáticas de posición y veloci-dad, adquieren la forma siguiente.
Componente de movimiento en x
x = −6.9t2, vx = −13.8t.
Componente de movimiento en y
y = −19.1t2, vy = −38.2t.
d) Mediante las expresiones para x y y , seencuentra que la ecuación de la trayectoriatiene la forma
y = 2.8x,
que corresponde a la ecuación de una línearecta, con pendiente 2.8 es decir, forma un
2.3. LEYES DE NEWTON DEL MOVIMIENTO 13
x
y
70.08o
Trayectoria
ángulo θ = 70.09o con la horizontal, comose muestra en la siguiente figura.
Mediante este ejemplo se ha cumplidocon el objetivo de la dinámica, ya que fueposible obtener la trayectoria seguida porla partícula, con sólo conocer las fuerzasque actúan sobre ella y las condiciones ini-ciales impuestas.
Ejercicio 2.4.Sobre una partícula de masa 3.0 kg, actúancuatro fuerzas como se indica en la figu-ra siguiente. a) Calcule la fuerza adicionalque es necesario aplicarle a la partícula,para que la resultante de las fuerzas seahorizontal, de magnitud 50 N y dirigidahacia la derecha. b) Calcule la aceleracióncorrespondiente de la partícula. c) Escribalas ecuaciones cinemáticas de posición yvelocidad, si la partícula parte del origencon una velocidad de 10.0 m · s−1, dirigi-da verticalmente hacia arriba. d) Obtengala ecuación de la trayectoria seguida por lapartícula y trace una gráfica de ella.
F4=50 N
F2
= 5 N F1= 10 N
x
y
53o
60o
40o
70o
F3=100 N
Ejemplo 2.5.Desde la base de un plano inclinado yliso, que forma un ángulo de 30o con lahorizontal, se lanza un bloque de masa
500 g, con una velocidad de 15.0 m · s−1.a) Haga el diagrama de cuerpo libre parael bloque. b) Determine la aceleración delbloque. c) Halle la fuerza que la superficieejerce sobre el bloque. d) Plantee lasecuaciones cinemáticas de posición yvelocidad, que rigen el movimiento delbloque. e) ¿Cuánto tiempo asciende elbloque por el plano inclinado? f) ¿Hastaqué altura, respecto a la base del planoinclinado, asciende el bloque?
SoluciónDe acuerdo con el enunciado, las can-tidades dadas son m = 500 g ≡ 0.5 kg,θ = 30o y vo = 15.0 m · s−1, siendo lacantidad conocida g = 9.8 m · s−2.
a) Diagrama de cuerpo libre: Sobre el bloqueactúa la fuerza que ejerce la superficie so-bre él, más conocida como normal; y lafuerza que le ejerce la tierra, conocida co-mo peso.
q
v
N
mg
x
y
b) La ecuación de movimiento en la direc-ción paralela al eje x, adquiere la forma
+ ↗ ∑ Fix = max
−mg senθ = max.
Como sólo hay movimiento en la direc-ción paralela al eje x, se tiene que la ace-leración del bloque es a = ax, así
a = −g senθ,
cuyo valor es
a = −4.9 m · s−2.
c) La ecuación de movimiento en la direc-ción paralela al eje y, adquiere la forma
+ ↑ ∑ Fiy = 0N − mg cosθ = 0,

14 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
donde se ha tomado ay = 0, ya que en estadirección no hay movimiento; así
N = mg cosθ,
encontrándose el valor
N = 4.24 N.
d) De acuerdo con el sistema de referencia,el bloque se mueve sobre el eje x con unaaceleración de −4.9 m · s−2. De este modo,las ecuaciones cinemáticas de posición yvelocidad, están dadas por
x = 15t − 2.45t2 y v = 15 − 4.9t
e) Como el bloque tiene un movimien-to rectilíneo uniformemente retardado, lle-ga un momento en el cual su velocidadse hace cero. De este nodo, mediante laecuación cinemática de velocidad, se en-cuentra que en ese instante
t = 3.06 s.
f) Reemplazando t = 3.06 s en la ecuacióncinemática de posición, se encuentra queel máximo desplazamiento sobre el planoinclinado es x máx = 22.96 m, así, median-te la figura anterior se encuentra que la al-tura máxima alcanzada por el cuerpo es
h = 11.48 m.
Ejercicio 2.5.Un bloque, de masa 500 g, parte del re-poso y se mueve sobre un plano incli-nado liso que forma un ángulo de 30o
con la horizontal. El bloque inicia sumovimiento desde una altura de 9.0 m res-pecto a la base de plano inclinado. a) Ha-ga el diagrama de cuerpo libre para elbloque. b) Determine la aceleración delbloque. c) Plantee las ecuaciones cinemáti-cas de posición y velocidad, que rigen elmovimiento del bloque. d) ¿Cuánto tiem-po tarda el bloque en llegar a la base delplano inclinado? e) ¿Cuál es la velocidaddel bloque cuando llega a la base del planoinclinado?
2.3.6. Equilibrio de una partícula
Una situación particular se presenta, cuando lafuerza neta o resultante es nula, es decir, F = 0;
en este caso, las fuerzas simultáneamente apli-cadas no tienen ningún efecto de traslación so-bre la partícula. Esto significa que los efectos delas fuerzas simultáneamente aplicadas se anu-lan entre sí. Cuando lo anterior ocurre, se diceque la partícula está en equilibrio, esto es si laresultante de todas las fuerzas que actúan sobre unapartícula es cero, la partícula se encuentra en equili-brio. Es decir, que por la ecuación (2.8) la deriva-da del momento lineal con respecto al tiempo escero, por lo que p = Constante, y la partícula seencuentra en equilibrio estático si permanece enreposo, o en equilibrio dinámico si permaneceen movimiento. Esta situación indica que la leyde inercia es un caso particular de la segundaley de Newton.
Matemáticamente, el equilibrio de unapartícula se puede expresar en la forma
F = ∑ Fi
= 0
o en componentes rectangulares(∑ Fix
)i +
(∑ Fiy
)j +
(∑ Fiz
)k = 0
Como los vectores unitarios i, j y k son lineal-mente independientes, las condiciones que sedeben satisfacer, para que la partícula esté enequilibrio, son
∑ Fix = 0,
∑ Fiy = 0,
∑ Fiz = 0.
Cuando las fuerzas actúan, por ejemplo en elplano xy , se dice que son coplanares y lascondiciones de equilibrio están dadas por
∑ Fix = 0,
∑ Fiy = 0.
Pautas a seguir en situaciones relacionadascon el equilibrio de una partícula.
1. Tener claridad sobre la situación plantea-da en el enunciado, identificando las can-tidades dadas y las incógnitas a obtener.
2.3. LEYES DE NEWTON DEL MOVIMIENTO 15
2. Hacer un diagrama ilustrativo de lasituación física que se ha planteado y en elcual se muestren las condiciones físicas delproblema. A este diagrama se le conoce co-mo diagrama espacial.
3. Elegir la partícula de interés y hacer undiagrama que muestre a esta y a todas lasfuerzas que actúen sobre ella. A dicho dia-grama se le conoce como diagrama de cuerpolibre (DCL).
4. Elegir un sistema de coordenadas adecua-do, es decir, un sistema que facilite la solu-ción del problema, en lugar de generarcomplejidad.
5. De acuerdo con el sistema de referenciaelegido, plantear las ecuaciones que garan-ticen la situación de equilibrio que se deseaanalizar.
6. Resolver el sistema de ecuaciones si-multáneas encontrado para obtener los re-sultados pedidos; de ser posible, hacerlo enforma literal, con el fin comprobar que lasdimensiones sean correctas y además, parapoder hacer un análisis cualitativo de losresultados.
7. Finalmente, dar los resultados numéricoscon las unidades adecuadas.
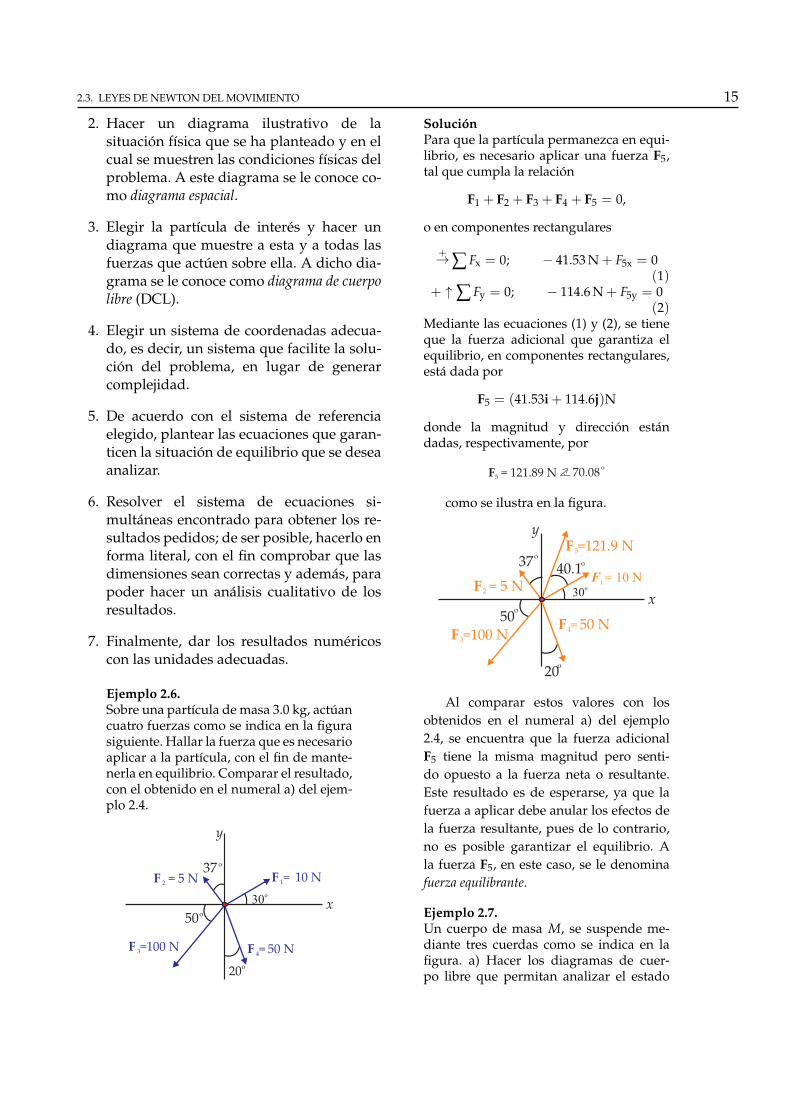
Ejemplo 2.6.Sobre una partícula de masa 3.0 kg, actúancuatro fuerzas como se indica en la figurasiguiente. Hallar la fuerza que es necesarioaplicar a la partícula, con el fin de mante-nerla en equilibrio. Comparar el resultado,con el obtenido en el numeral a) del ejem-plo 2.4.
F4= 50 N
F2= 5 N F
1= 10 N
x
y
37o
30o
50o
20o
F3=100 N
SoluciónPara que la partícula permanezca en equi-librio, es necesario aplicar una fuerza F5,tal que cumpla la relación
F1 + F2 + F3 + F4 + F5 = 0,
o en componentes rectangulares
+→∑ Fx = 0; − 41.53 N + F5x = 0(1)
+ ↑ ∑ Fy = 0; − 114.6 N + F5y = 0(2)
Mediante las ecuaciones (1) y (2), se tieneque la fuerza adicional que garantiza elequilibrio, en componentes rectangulares,está dada por
F5 = (41.53i + 114.6j)N
donde la magnitud y dirección estándadas, respectivamente, por
F5= 121.89 N 70.08
o
como se ilustra en la figura.
F4= 50 N
F2= 5 N
F1= 10 N
x
y
37o
30o
50o
20o
F3=100 N
40.1o
F5=121.9 N
Al comparar estos valores con losobtenidos en el numeral a) del ejemplo2.4, se encuentra que la fuerza adicionalF5 tiene la misma magnitud pero senti-do opuesto a la fuerza neta o resultante.Este resultado es de esperarse, ya que lafuerza a aplicar debe anular los efectos dela fuerza resultante, pues de lo contrario,no es posible garantizar el equilibrio. Ala fuerza F5, en este caso, se le denominafuerza equilibrante.
Ejemplo 2.7.Un cuerpo de masa M, se suspende me-diante tres cuerdas como se indica en lafigura. a) Hacer los diagramas de cuer-po libre que permitan analizar el estado
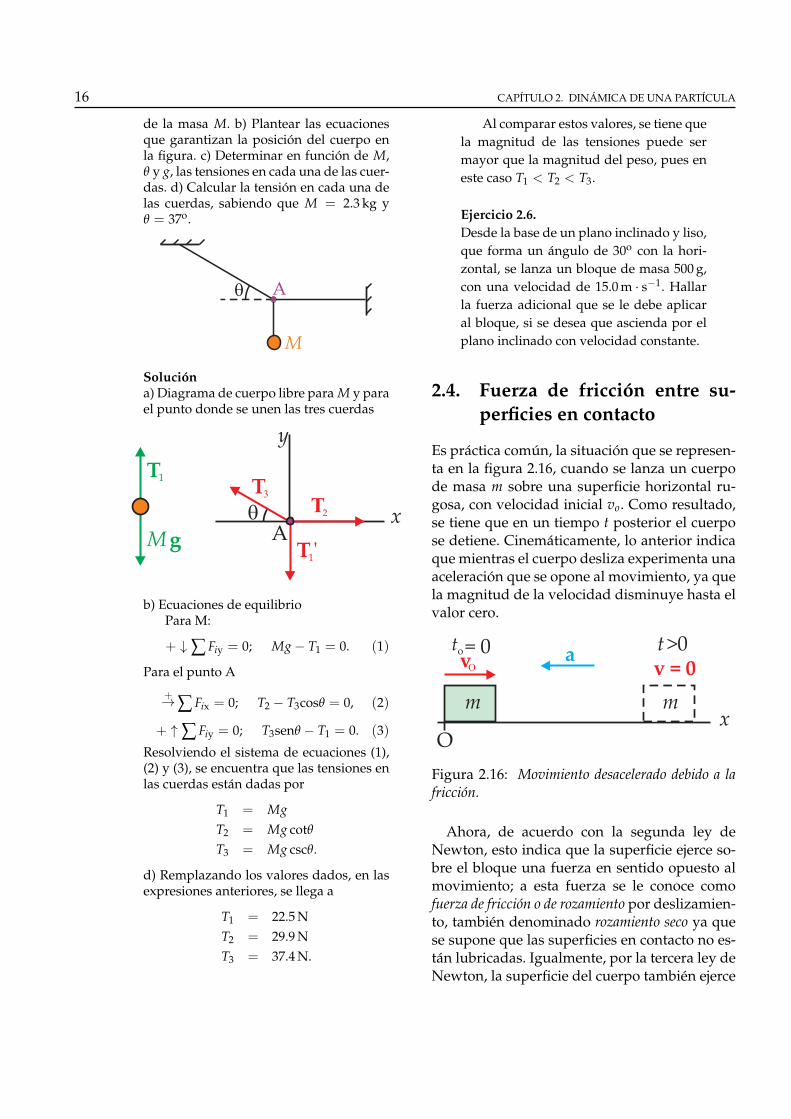
16 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
de la masa M. b) Plantear las ecuacionesque garantizan la posición del cuerpo enla figura. c) Determinar en función de M,θ y g, las tensiones en cada una de las cuer-das. d) Calcular la tensión en cada una delas cuerdas, sabiendo que M = 2.3 kg yθ = 37o.
A
M
q
Solucióna) Diagrama de cuerpo libre para M y parael punto donde se unen las tres cuerdas
Mg
T1
y
T1'
A
T3
T2 xq
b) Ecuaciones de equilibrioPara M:
+ ↓ ∑ Fiy = 0; Mg − T1 = 0. (1)
Para el punto A
+→∑ Fix = 0; T2 − T3cosθ = 0, (2)
+ ↑ ∑ Fiy = 0; T3senθ − T1 = 0. (3)
Resolviendo el sistema de ecuaciones (1),(2) y (3), se encuentra que las tensiones enlas cuerdas están dadas por
T1 = MgT2 = Mg cotθT3 = Mg cscθ.
d) Remplazando los valores dados, en lasexpresiones anteriores, se llega a
T1 = 22.5 NT2 = 29.9 NT3 = 37.4 N.
Al comparar estos valores, se tiene quela magnitud de las tensiones puede sermayor que la magnitud del peso, pues eneste caso T1 < T2 < T3.
Ejercicio 2.6.Desde la base de un plano inclinado y liso,que forma un ángulo de 30o con la hori-zontal, se lanza un bloque de masa 500 g,con una velocidad de 15.0 m · s−1. Hallarla fuerza adicional que se le debe aplicaral bloque, si se desea que ascienda por elplano inclinado con velocidad constante.
2.4. Fuerza de fricción entre su-perficies en contacto
Es práctica común, la situación que se represen-ta en la figura 2.16, cuando se lanza un cuerpode masa m sobre una superficie horizontal ru-gosa, con velocidad inicial vo. Como resultado,se tiene que en un tiempo t posterior el cuerpose detiene. Cinemáticamente, lo anterior indicaque mientras el cuerpo desliza experimenta unaaceleración que se opone al movimiento, ya quela magnitud de la velocidad disminuye hasta elvalor cero.
O
x
vO v = 0
at
o= 0 t >0
m m
Figura 2.16: Movimiento desacelerado debido a lafricción.
Ahora, de acuerdo con la segunda ley deNewton, esto indica que la superficie ejerce so-bre el bloque una fuerza en sentido opuesto almovimiento; a esta fuerza se le conoce comofuerza de fricción o de rozamiento por deslizamien-to, también denominado rozamiento seco ya quese supone que las superficies en contacto no es-tán lubricadas. Igualmente, por la tercera ley deNewton, la superficie del cuerpo también ejerce
2.4. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 17
una fuerza de rozamiento sobre la superficie enla cual se mueve, y es igual en magnitud perocon sentido opuesto.
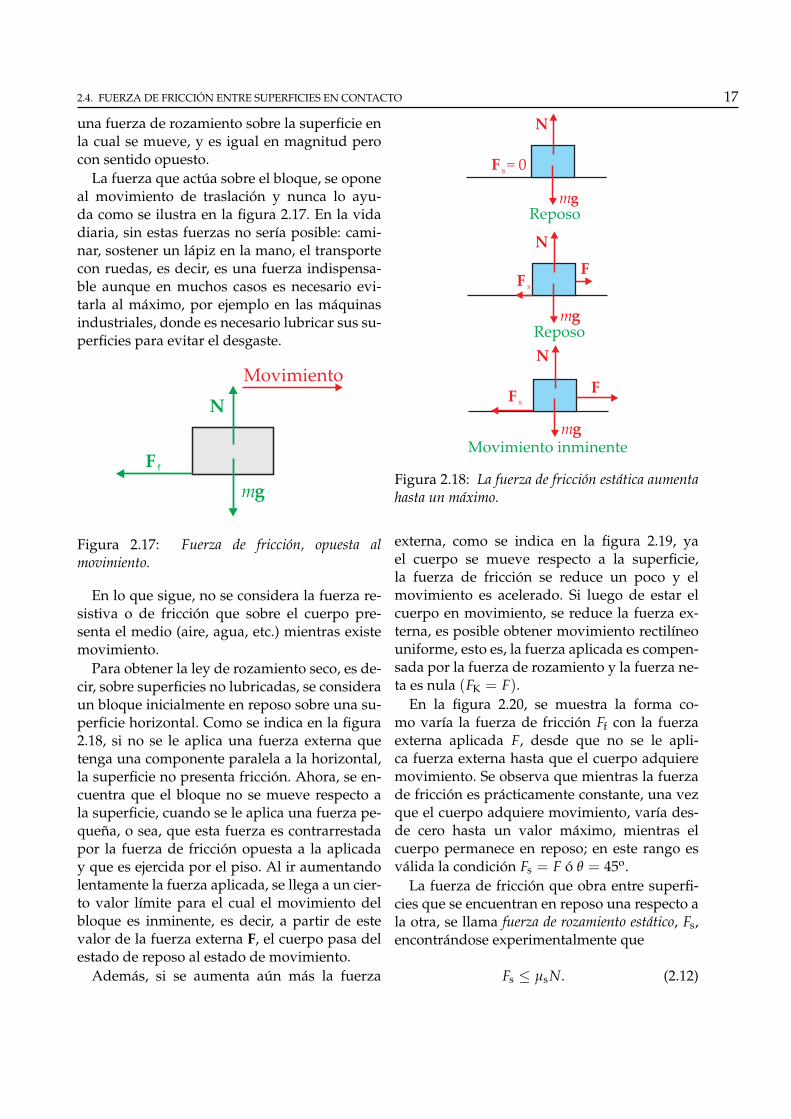
La fuerza que actúa sobre el bloque, se oponeal movimiento de traslación y nunca lo ayu-da como se ilustra en la figura 2.17. En la vidadiaria, sin estas fuerzas no sería posible: cami-nar, sostener un lápiz en la mano, el transportecon ruedas, es decir, es una fuerza indispensa-ble aunque en muchos casos es necesario evi-tarla al máximo, por ejemplo en las máquinasindustriales, donde es necesario lubricar sus su-perficies para evitar el desgaste.
Ff
mg
N
Movimiento
Figura 2.17: Fuerza de fricción, opuesta almovimiento.
En lo que sigue, no se considera la fuerza re-sistiva o de fricción que sobre el cuerpo pre-senta el medio (aire, agua, etc.) mientras existemovimiento.
Para obtener la ley de rozamiento seco, es de-cir, sobre superficies no lubricadas, se consideraun bloque inicialmente en reposo sobre una su-perficie horizontal. Como se indica en la figura2.18, si no se le aplica una fuerza externa quetenga una componente paralela a la horizontal,la superficie no presenta fricción. Ahora, se en-cuentra que el bloque no se mueve respecto ala superficie, cuando se le aplica una fuerza pe-queña, o sea, que esta fuerza es contrarrestadapor la fuerza de fricción opuesta a la aplicaday que es ejercida por el piso. Al ir aumentandolentamente la fuerza aplicada, se llega a un cier-to valor límite para el cual el movimiento delbloque es inminente, es decir, a partir de estevalor de la fuerza externa F, el cuerpo pasa delestado de reposo al estado de movimiento.
Además, si se aumenta aún más la fuerza
F s = 0
N
mg
F s
mg
N
F s
mg
N
F
F
Reposo
Reposo
Movimiento inminente
Figura 2.18: La fuerza de fricción estática aumentahasta un máximo.
externa, como se indica en la figura 2.19, yael cuerpo se mueve respecto a la superficie,la fuerza de fricción se reduce un poco y elmovimiento es acelerado. Si luego de estar elcuerpo en movimiento, se reduce la fuerza ex-terna, es posible obtener movimiento rectilíneouniforme, esto es, la fuerza aplicada es compen-sada por la fuerza de rozamiento y la fuerza ne-ta es nula (FK = F).
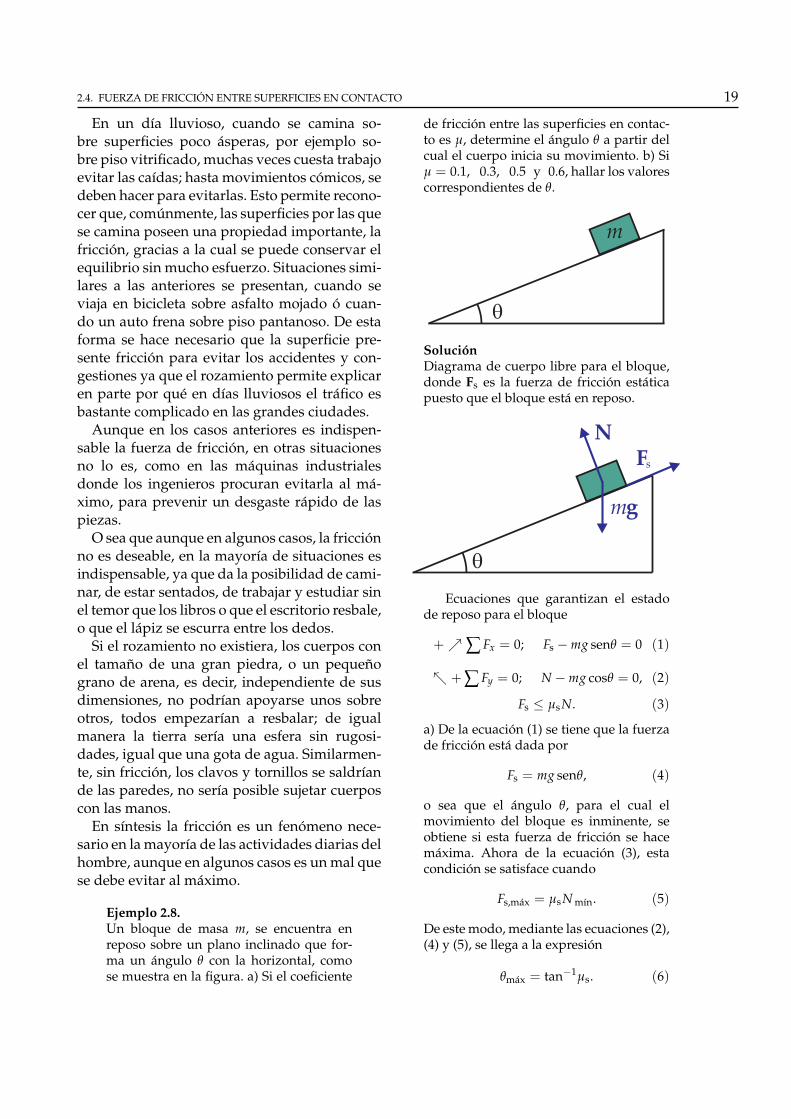
En la figura 2.20, se muestra la forma co-mo varía la fuerza de fricción Ff con la fuerzaexterna aplicada F, desde que no se le apli-ca fuerza externa hasta que el cuerpo adquieremovimiento. Se observa que mientras la fuerzade fricción es prácticamente constante, una vezque el cuerpo adquiere movimiento, varía des-de cero hasta un valor máximo, mientras elcuerpo permanece en reposo; en este rango esválida la condición Fs = F ó θ = 45o.
La fuerza de fricción que obra entre superfi-cies que se encuentran en reposo una respecto ala otra, se llama fuerza de rozamiento estático, Fs,encontrándose experimentalmente que
Fs ≤ µsN. (2.12)
18 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
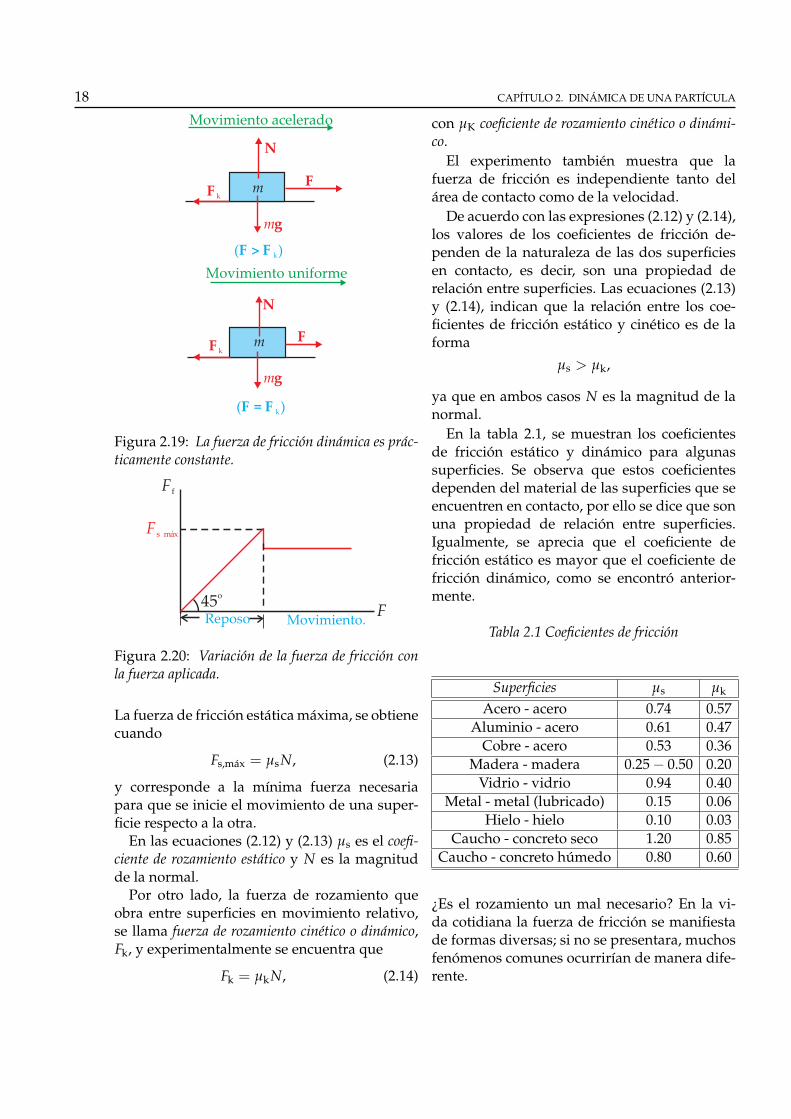
F k
mg
N
F
Movimiento acelerado
m
( )F > F k
F k
mg
N
F
Movimiento uniforme
( )F = F k
m
Figura 2.19: La fuerza de fricción dinámica es prác-ticamente constante.
Reposo Movimiento.
F f
F
Fs máx
45o
Figura 2.20: Variación de la fuerza de fricción conla fuerza aplicada.
La fuerza de fricción estática máxima, se obtienecuando
Fs,máx = µsN, (2.13)
y corresponde a la mínima fuerza necesariapara que se inicie el movimiento de una super-ficie respecto a la otra.
En las ecuaciones (2.12) y (2.13) µs es el coefi-ciente de rozamiento estático y N es la magnitudde la normal.
Por otro lado, la fuerza de rozamiento queobra entre superficies en movimiento relativo,se llama fuerza de rozamiento cinético o dinámico,Fk, y experimentalmente se encuentra que
Fk = µkN, (2.14)
con µK coeficiente de rozamiento cinético o dinámi-co.
El experimento también muestra que lafuerza de fricción es independiente tanto delárea de contacto como de la velocidad.
De acuerdo con las expresiones (2.12) y (2.14),los valores de los coeficientes de fricción de-penden de la naturaleza de las dos superficiesen contacto, es decir, son una propiedad derelación entre superficies. Las ecuaciones (2.13)y (2.14), indican que la relación entre los coe-ficientes de fricción estático y cinético es de laforma
µs > µk,
ya que en ambos casos N es la magnitud de lanormal.
En la tabla 2.1, se muestran los coeficientesde fricción estático y dinámico para algunassuperficies. Se observa que estos coeficientesdependen del material de las superficies que seencuentren en contacto, por ello se dice que sonuna propiedad de relación entre superficies.Igualmente, se aprecia que el coeficiente defricción estático es mayor que el coeficiente defricción dinámico, como se encontró anterior-mente.
Tabla 2.1 Coeficientes de fricción
Superficies µs µk
Acero - acero 0.74 0.57Aluminio - acero 0.61 0.47
Cobre - acero 0.53 0.36Madera - madera 0.25 − 0.50 0.20
Vidrio - vidrio 0.94 0.40Metal - metal (lubricado) 0.15 0.06
Hielo - hielo 0.10 0.03Caucho - concreto seco 1.20 0.85
Caucho - concreto húmedo 0.80 0.60
¿Es el rozamiento un mal necesario? En la vi-da cotidiana la fuerza de fricción se manifiestade formas diversas; si no se presentara, muchosfenómenos comunes ocurrirían de manera dife-rente.
2.4. FUERZA DE FRICCIÓN ENTRE SUPERFICIES EN CONTACTO 19
En un día lluvioso, cuando se camina so-bre superficies poco ásperas, por ejemplo so-bre piso vitrificado, muchas veces cuesta trabajoevitar las caídas; hasta movimientos cómicos, sedeben hacer para evitarlas. Esto permite recono-cer que, comúnmente, las superficies por las quese camina poseen una propiedad importante, lafricción, gracias a la cual se puede conservar elequilibrio sin mucho esfuerzo. Situaciones simi-lares a las anteriores se presentan, cuando seviaja en bicicleta sobre asfalto mojado ó cuan-do un auto frena sobre piso pantanoso. De estaforma se hace necesario que la superficie pre-sente fricción para evitar los accidentes y con-gestiones ya que el rozamiento permite explicaren parte por qué en días lluviosos el tráfico esbastante complicado en las grandes ciudades.
Aunque en los casos anteriores es indispen-sable la fuerza de fricción, en otras situacionesno lo es, como en las máquinas industrialesdonde los ingenieros procuran evitarla al má-ximo, para prevenir un desgaste rápido de laspiezas.
O sea que aunque en algunos casos, la fricciónno es deseable, en la mayoría de situaciones esindispensable, ya que da la posibilidad de cami-nar, de estar sentados, de trabajar y estudiar sinel temor que los libros o que el escritorio resbale,o que el lápiz se escurra entre los dedos.
Si el rozamiento no existiera, los cuerpos conel tamaño de una gran piedra, o un pequeñograno de arena, es decir, independiente de susdimensiones, no podrían apoyarse unos sobreotros, todos empezarían a resbalar; de igualmanera la tierra sería una esfera sin rugosi-dades, igual que una gota de agua. Similarmen-te, sin fricción, los clavos y tornillos se saldríande las paredes, no sería posible sujetar cuerposcon las manos.
En síntesis la fricción es un fenómeno nece-sario en la mayoría de las actividades diarias delhombre, aunque en algunos casos es un mal quese debe evitar al máximo.
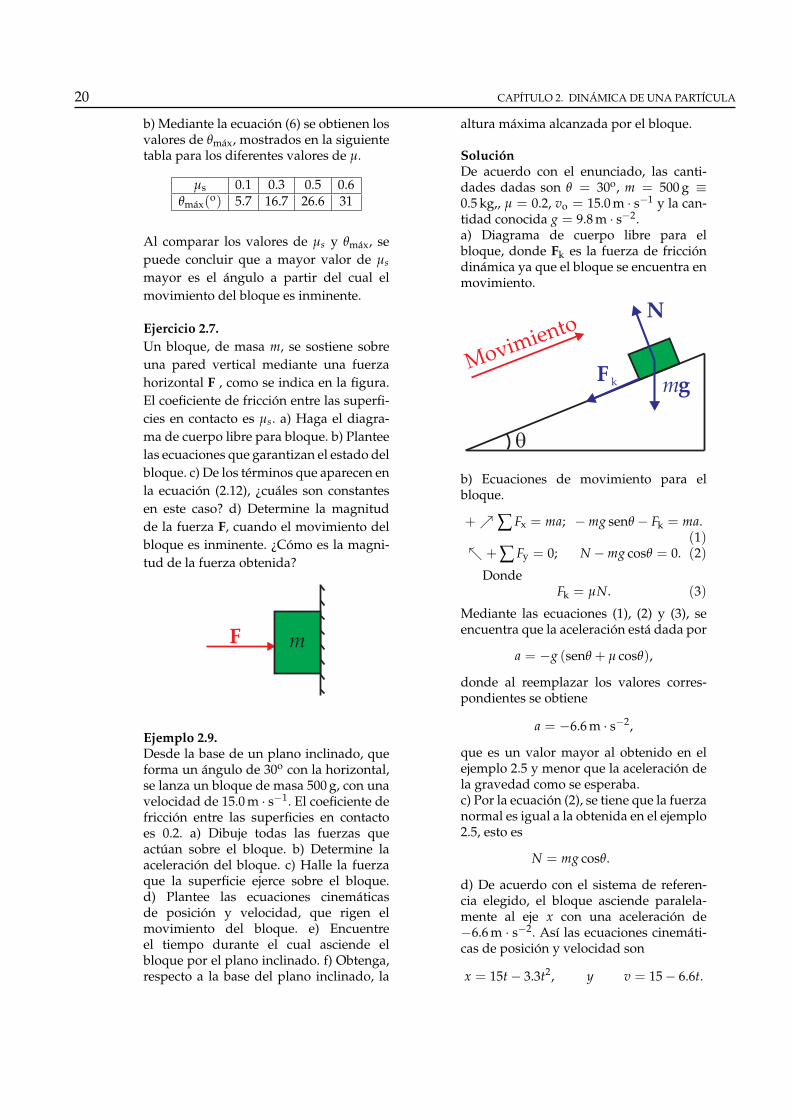
Ejemplo 2.8.Un bloque de masa m, se encuentra enreposo sobre un plano inclinado que for-ma un ángulo θ con la horizontal, comose muestra en la figura. a) Si el coeficiente
de fricción entre las superficies en contac-to es µ, determine el ángulo θ a partir delcual el cuerpo inicia su movimiento. b) Siµ = 0.1, 0.3, 0.5 y 0.6, hallar los valorescorrespondientes de θ.
q
m
SoluciónDiagrama de cuerpo libre para el bloque,donde Fs es la fuerza de fricción estáticapuesto que el bloque está en reposo.
q
mg
NFs
Ecuaciones que garantizan el estadode reposo para el bloque
+ ↗ ∑ Fx = 0; Fs − mg senθ = 0 (1)
↖ +∑ Fy = 0; N − mg cosθ = 0, (2)
Fs ≤ µsN. (3)
a) De la ecuación (1) se tiene que la fuerzade fricción está dada por
Fs = mg senθ, (4)
o sea que el ángulo θ, para el cual elmovimiento del bloque es inminente, seobtiene si esta fuerza de fricción se hacemáxima. Ahora de la ecuación (3), estacondición se satisface cuando
Fs,máx = µsN mín. (5)
De este modo, mediante las ecuaciones (2),(4) y (5), se llega a la expresión
θmáx = tan−1µs. (6)
20 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
b) Mediante la ecuación (6) se obtienen losvalores de θmáx, mostrados en la siguientetabla para los diferentes valores de µ.
µs 0.1 0.3 0.5 0.6θmáx(
o) 5.7 16.7 26.6 31
Al comparar los valores de µs y θmáx, sepuede concluir que a mayor valor de µs
mayor es el ángulo a partir del cual elmovimiento del bloque es inminente.
Ejercicio 2.7.Un bloque, de masa m, se sostiene sobreuna pared vertical mediante una fuerzahorizontal F , como se indica en la figura.El coeficiente de fricción entre las superfi-cies en contacto es µs. a) Haga el diagra-ma de cuerpo libre para bloque. b) Planteelas ecuaciones que garantizan el estado delbloque. c) De los términos que aparecen enla ecuación (2.12), ¿cuáles son constantesen este caso? d) Determine la magnitudde la fuerza F, cuando el movimiento delbloque es inminente. ¿Cómo es la magni-tud de la fuerza obtenida?
F m
Ejemplo 2.9.Desde la base de un plano inclinado, queforma un ángulo de 30o con la horizontal,se lanza un bloque de masa 500 g, con unavelocidad de 15.0 m · s−1. El coeficiente defricción entre las superficies en contactoes 0.2. a) Dibuje todas las fuerzas queactúan sobre el bloque. b) Determine laaceleración del bloque. c) Halle la fuerzaque la superficie ejerce sobre el bloque.d) Plantee las ecuaciones cinemáticasde posición y velocidad, que rigen elmovimiento del bloque. e) Encuentreel tiempo durante el cual asciende elbloque por el plano inclinado. f) Obtenga,respecto a la base del plano inclinado, la
altura máxima alcanzada por el bloque.
SoluciónDe acuerdo con el enunciado, las canti-dades dadas son θ = 30o, m = 500 g ≡0.5 kg,, µ = 0.2, vo = 15.0 m · s−1 y la can-tidad conocida g = 9.8 m · s−2.a) Diagrama de cuerpo libre para elbloque, donde Fk es la fuerza de friccióndinámica ya que el bloque se encuentra enmovimiento.
q
mg
N
Fk
Movimiento
b) Ecuaciones de movimiento para elbloque.
+ ↗ ∑ Fx = ma; − mg senθ − Fk = ma.(1)
↖ +∑ Fy = 0; N − mg cosθ = 0. (2)
DondeFk = µN. (3)
Mediante las ecuaciones (1), (2) y (3), seencuentra que la aceleración está dada por
a = −g (senθ + µ cosθ),
donde al reemplazar los valores corres-pondientes se obtiene
a = −6.6 m · s−2,
que es un valor mayor al obtenido en elejemplo 2.5 y menor que la aceleración dela gravedad como se esperaba.c) Por la ecuación (2), se tiene que la fuerzanormal es igual a la obtenida en el ejemplo2.5, esto es
N = mg cosθ.
d) De acuerdo con el sistema de referen-cia elegido, el bloque asciende paralela-mente al eje x con una aceleración de−6.6 m · s−2. Así las ecuaciones cinemáti-cas de posición y velocidad son
x = 15t − 3.3t2, y v = 15 − 6.6t.

2.5. FUERZA DE FRICCIÓN EN FLUIDOS 21
e) Como el bloque asciende conmovimiento rectilíneo uniformementeretardado, llega un momento en el cualsu velocidad se hace cero. Mediante laecuación cinemática de velocidad, endicho instante t = 2.27 s, que es un tiempomenor que el encontrado en el ejemplo2.5.f) Reemplazando t = 2.27 s en la ecuacióncinemática de posición, se encuentra queel máximo desplazamiento sobre el planoinclinado es xmáx = 17.05 m. Así, de lafigura anterior se encuentra que la al-tura máxima alcanzada por el bloque es8.53 m,correspondiendo a un valor menorque el obtenido en el ejemplo 2.5.
Ejercicio 2.8.Desde la base de un plano inclinado, queforma un ángulo de 30o con la horizon-tal, se lanza un bloque de masa 0.5 kg,con una velocidad de 15.0 m · s−1. El coe-ficiente de fricción entre las superficiesen contacto es 0.15. a) Dibuje todas lasfuerzas que actúan sobre el bloque. b)Determine la aceleración del bloque. c)Halle la fuerza que la superficie ejerce so-bre el bloque. d) Plantee las ecuacionescinemáticas de posición y velocidad, querigen el movimiento del bloque. e) ¿Cuán-to tiempo asciende el bloque por el planoinclinado? f) ¿Hasta qué altura, respectoa la base del plano inclinado, asciende elbloque? Compare los resultados con losobtenidos en los ejemplos 2.5 y 2.9.
2.5. Fuerza de fricción en fluidos
Los fluidos presentan dos tipos de fuerza comoson el empuje y la fuerza resistiva o de fricciónque actúan sobre los cuerpos que se muevenen su interior. En esta sección sólo se analiza elefecto de la fuerza resistiva que presentan losfluidos a los cuerpos en movimiento. Cuandoun cuerpo se mueve en un fluido (líquido o gas)y las velocidades no son muy grandes, aproxi-madamente se puede obtener que la fuerza defricción es proporcional a la velocidad pero con
sentido opuesto, es decir
Ff = −Kηv, (2.15)
donde K es el coeficiente de fricción que dependede la forma del cuerpo. En el caso de un cuerpoesférico de radio R, este coeficiente de friccióntiene la forma
K = 6πR,
expresión conocida como ley de Stokes.η es el coeficiente de viscosidad que depende de
la fricción entre las diferentes capas del fluido,que se mueven a velocidades diferentes. A lafuerza de fricción entre las capas del fluido se lellama viscosidad, propiedad que con un aumen-to de temperatura disminuye en los líquidos yaumenta en los gases.
En la tabla 2.2 se dan los valores de viscosi-dad para algunos fluidos. Se observa que el va-lor de la viscosidad depende de la temperaturaa la cual se encuentre el fluido.
Tabla 2.2. Coeficientes de viscosidad.
Líquido η(cP)
Agua (0oC) 1.792Agua (20oC) 1.005Agua (40oC) 0.656
Aceite de castor (20oC) 9.860Glicerina (20oC) 833.0Mercurio (20oC) 1.550
Gas η(µP)
Aire (0oC) 171Aire (20oC) 181Aire (40oC) 190
Hidrógeno (20oC) 93.0Amoníaco (20oC) 97.0
Bióxido de carbono (20oC) 146
Dimensiones y unidades de ηDe acuerdo con la ecuación (2.15) el coeficientede viscosidad tiene dimensiones ML−1T−1. Así,las unidades en el sistema SI son kg · m−1 · s−1,y en el sistema gaussiano g · cm−1 · s−1. Se acos-tumbra definir 1 Poise(P) ≡ 1 g · cm−1 · s−1, osea que 1kg · m−1 · s−1 ≡ 10 P. Igualmente se
22 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
emplea el centipoise ( 1 cP ≡ 10−2 P) y el mi-cropoise ( 1 µP ≡ 10−6 P).
El caso analizado anteriormente correspon-de a un ejemplo de fuerza variable, ya que de-pende de la velocidad del cuerpo.
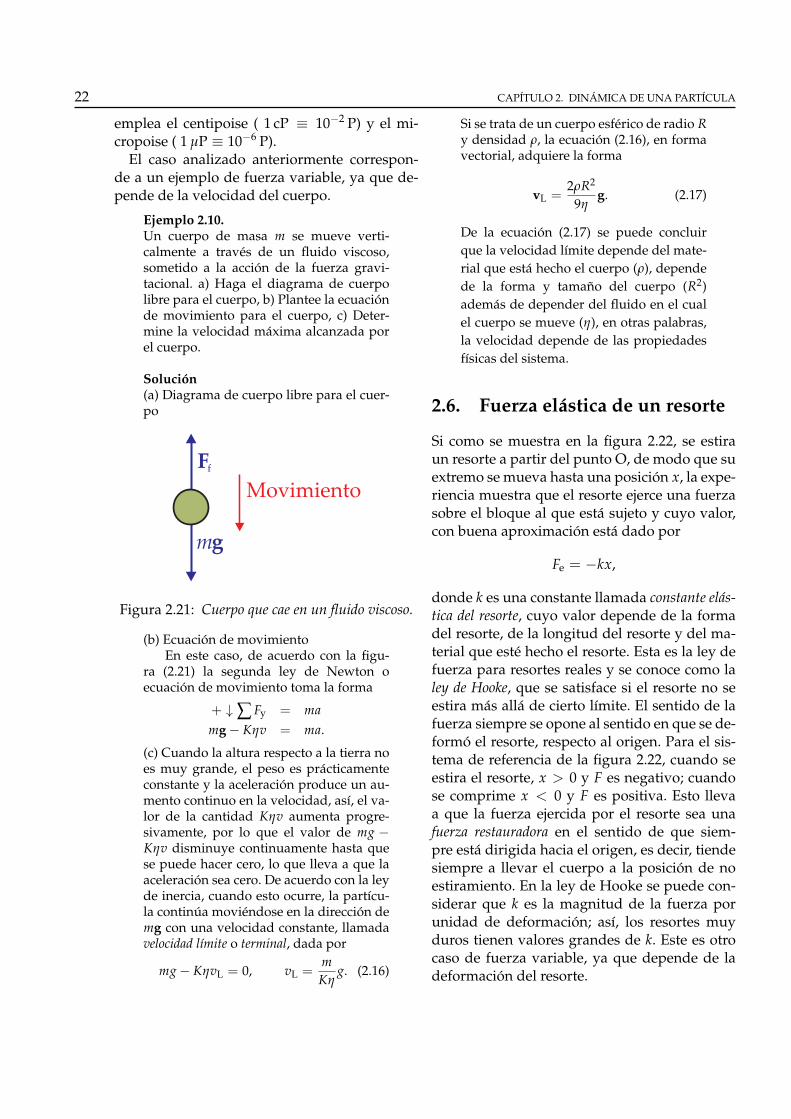
Ejemplo 2.10.Un cuerpo de masa m se mueve verti-calmente a través de un fluido viscoso,sometido a la acción de la fuerza gravi-tacional. a) Haga el diagrama de cuerpolibre para el cuerpo, b) Plantee la ecuaciónde movimiento para el cuerpo, c) Deter-mine la velocidad máxima alcanzada porel cuerpo.
Solución(a) Diagrama de cuerpo libre para el cuer-po
mg
Ff
Movimiento
Figura 2.21: Cuerpo que cae en un fluido viscoso.
(b) Ecuación de movimientoEn este caso, de acuerdo con la figu-
ra (2.21) la segunda ley de Newton oecuación de movimiento toma la forma
+ ↓ ∑ Fy = mamg − Kηv = ma.
(c) Cuando la altura respecto a la tierra noes muy grande, el peso es prácticamenteconstante y la aceleración produce un au-mento continuo en la velocidad, así, el va-lor de la cantidad Kηv aumenta progre-sivamente, por lo que el valor de mg −Kηv disminuye continuamente hasta quese puede hacer cero, lo que lleva a que laaceleración sea cero. De acuerdo con la leyde inercia, cuando esto ocurre, la partícu-la continúa moviéndose en la dirección demg con una velocidad constante, llamadavelocidad límite o terminal, dada por
mg − KηvL = 0, vL =mKη
g. (2.16)
Si se trata de un cuerpo esférico de radio Ry densidad ρ, la ecuación (2.16), en formavectorial, adquiere la forma
vL =2ρR2
9ηg. (2.17)
De la ecuación (2.17) se puede concluirque la velocidad límite depende del mate-rial que está hecho el cuerpo (ρ), dependede la forma y tamaño del cuerpo (R2)además de depender del fluido en el cualel cuerpo se mueve (η), en otras palabras,la velocidad depende de las propiedadesfísicas del sistema.
2.6. Fuerza elástica de un resorte
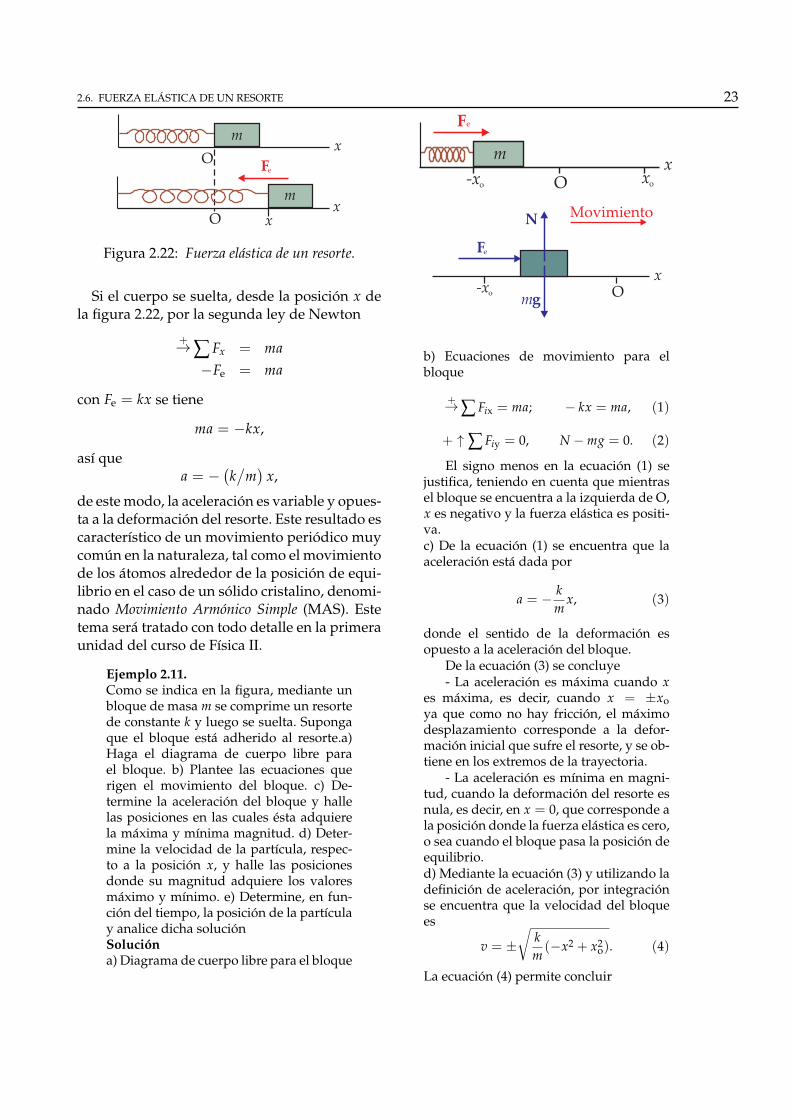
Si como se muestra en la figura 2.22, se estiraun resorte a partir del punto O, de modo que suextremo se mueva hasta una posición x, la expe-riencia muestra que el resorte ejerce una fuerzasobre el bloque al que está sujeto y cuyo valor,con buena aproximación está dado por
Fe = −kx,
donde k es una constante llamada constante elás-tica del resorte, cuyo valor depende de la formadel resorte, de la longitud del resorte y del ma-terial que esté hecho el resorte. Esta es la ley defuerza para resortes reales y se conoce como laley de Hooke, que se satisface si el resorte no seestira más allá de cierto límite. El sentido de lafuerza siempre se opone al sentido en que se de-formó el resorte, respecto al origen. Para el sis-tema de referencia de la figura 2.22, cuando seestira el resorte, x > 0 y F es negativo; cuandose comprime x < 0 y F es positiva. Esto llevaa que la fuerza ejercida por el resorte sea unafuerza restauradora en el sentido de que siem-pre está dirigida hacia el origen, es decir, tiendesiempre a llevar el cuerpo a la posición de noestiramiento. En la ley de Hooke se puede con-siderar que k es la magnitud de la fuerza porunidad de deformación; así, los resortes muyduros tienen valores grandes de k. Este es otrocaso de fuerza variable, ya que depende de ladeformación del resorte.
2.6. FUERZA ELÁSTICA DE UN RESORTE 23
m
Ox
x
O
m
Fe
x
Figura 2.22: Fuerza elástica de un resorte.
Si el cuerpo se suelta, desde la posición x dela figura 2.22, por la segunda ley de Newton
+→∑ Fx = ma−Fe = ma
con Fe = kx se tiene
ma = −kx,
así quea = −
(k/
m)
x,
de este modo, la aceleración es variable y opues-ta a la deformación del resorte. Este resultado escaracterístico de un movimiento periódico muycomún en la naturaleza, tal como el movimientode los átomos alrededor de la posición de equi-librio en el caso de un sólido cristalino, denomi-nado Movimiento Armónico Simple (MAS). Estetema será tratado con todo detalle en la primeraunidad del curso de Física II.
Ejemplo 2.11.Como se indica en la figura, mediante unbloque de masa m se comprime un resortede constante k y luego se suelta. Supongaque el bloque está adherido al resorte.a)Haga el diagrama de cuerpo libre parael bloque. b) Plantee las ecuaciones querigen el movimiento del bloque. c) De-termine la aceleración del bloque y hallelas posiciones en las cuales ésta adquierela máxima y mínima magnitud. d) Deter-mine la velocidad de la partícula, respec-to a la posición x, y halle las posicionesdonde su magnitud adquiere los valoresmáximo y mínimo. e) Determine, en fun-ción del tiempo, la posición de la partículay analice dicha soluciónSolucióna) Diagrama de cuerpo libre para el bloque
m
x
O
Fe
-xo
xo
Fe
mg
N Movimiento
x
-xo O
b) Ecuaciones de movimiento para elbloque
+→∑ Fix = ma; − kx = ma, (1)
+ ↑ ∑ Fiy = 0, N − mg = 0. (2)
El signo menos en la ecuación (1) sejustifica, teniendo en cuenta que mientrasel bloque se encuentra a la izquierda de O,x es negativo y la fuerza elástica es positi-va.c) De la ecuación (1) se encuentra que laaceleración está dada por
a = − km
x, (3)
donde el sentido de la deformación esopuesto a la aceleración del bloque.
De la ecuación (3) se concluye- La aceleración es máxima cuando x
es máxima, es decir, cuando x = ±xoya que como no hay fricción, el máximodesplazamiento corresponde a la defor-mación inicial que sufre el resorte, y se ob-tiene en los extremos de la trayectoria.
- La aceleración es mínima en magni-tud, cuando la deformación del resorte esnula, es decir, en x = 0, que corresponde ala posición donde la fuerza elástica es cero,o sea cuando el bloque pasa la posición deequilibrio.d) Mediante la ecuación (3) y utilizando ladefinición de aceleración, por integraciónse encuentra que la velocidad del bloquees
v = ±√
km(−x2 + x2
o). (4)
La ecuación (4) permite concluir
24 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
- La velocidad se hace máxima cuandox2
o − x2 es máxima, o sea cuando x = 0 quecorresponde a la posición de equilibrio.
- La velocidad se hace cero cuandox2
o − x2 = 0, así x = ±xo que coincide conlos extremos de la trayectoria.e) Con ayuda de la ecuación (4) y em-pleando la definición de velocidad, por in-tegración se encuentra que la posición dela partícula en función del tiempo, está da-da por
x = xo cos(ωt), (5)
donde se define ω ≡√
k/m como la fre-cuencia angular de oscilación.
La ecuación (5) indica que la posiciónde la partícula depende periódicamentedel tiempo, esto es, el bloque tiene unmovimiento que se repite continuamente,entre las posiciones extremas x = ±xo,siempre y cuando se puedan despreciarlos efectos debidos a la fricción.
En síntesis, en los puntos de la trayec-toria donde la aceleración se hace máxima,la velocidad adquiere su mínimo valor ydonde la aceleración se hace mínima la ve-locidad se hace máxima.
2.7. Dinámica del movimientocurvilíneo
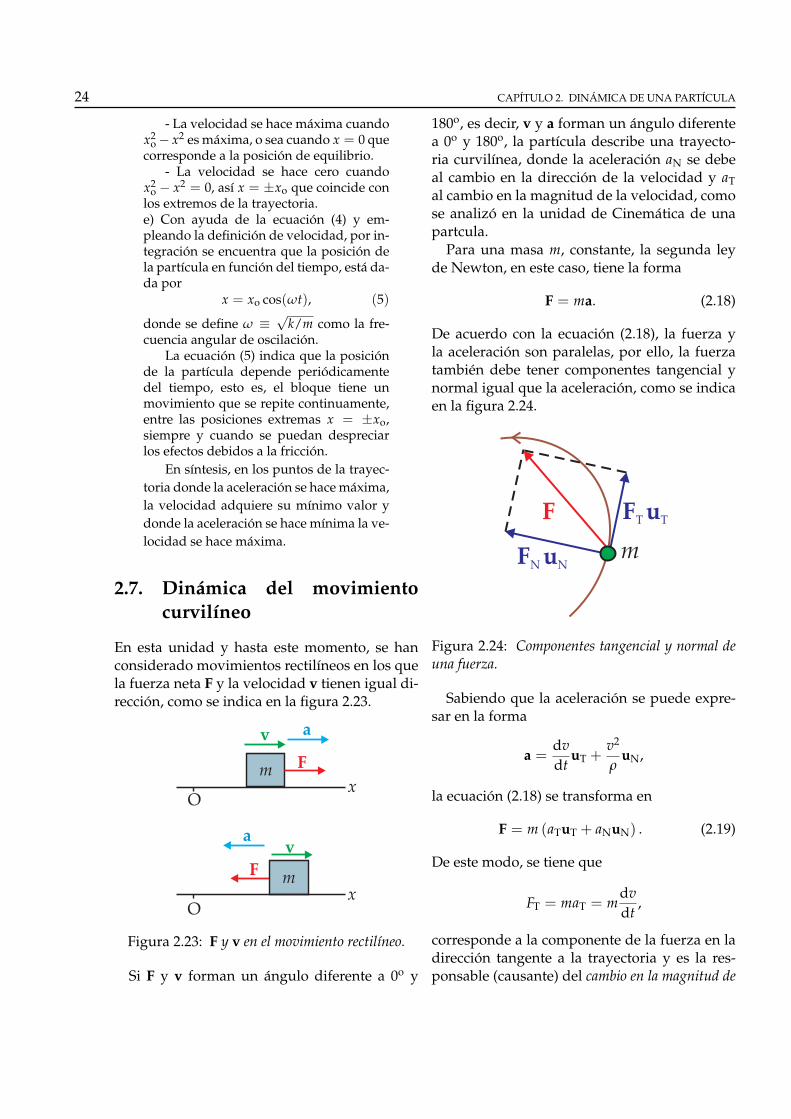
En esta unidad y hasta este momento, se hanconsiderado movimientos rectilíneos en los quela fuerza neta F y la velocidad v tienen igual di-rección, como se indica en la figura 2.23.
Ox
Ox
m
v a
Fm
av
F
Figura 2.23: F y v en el movimiento rectilíneo.
Si F y v forman un ángulo diferente a 0o y
180o, es decir, v y a forman un ángulo diferentea 0o y 180o, la partícula describe una trayecto-ria curvilínea, donde la aceleración aN se debeal cambio en la dirección de la velocidad y aTal cambio en la magnitud de la velocidad, comose analizó en la unidad de Cinemática de unapartcula.
Para una masa m, constante, la segunda leyde Newton, en este caso, tiene la forma
F = ma. (2.18)
De acuerdo con la ecuación (2.18), la fuerza yla aceleración son paralelas, por ello, la fuerzatambién debe tener componentes tangencial ynormal igual que la aceleración, como se indicaen la figura 2.24.
F
F uN N
F uT T
m
Figura 2.24: Componentes tangencial y normal deuna fuerza.
Sabiendo que la aceleración se puede expre-sar en la forma
a =dvdt
uT +v2
ρuN,
la ecuación (2.18) se transforma en
F = m (aTuT + aNuN) . (2.19)
De este modo, se tiene que
FT = maT = mdvdt
,
corresponde a la componente de la fuerza en ladirección tangente a la trayectoria y es la res-ponsable (causante) del cambio en la magnitud de

2.7. DINÁMICA DEL MOVIMIENTO CURVILÍNEO 25
la velocidad, por ello, a esta componente se le lla-ma fuerza tangencial.
Igualmente,
FN =mv2
ρ,
corresponde a la componente de la fuerzaen la dirección normal, apuntando siemprehacia el centro de curvatura de la trayectoriay es la responsable (causante) del cambio en ladirección de la velocidad. A esta componente se ledenomina fuerza normal o centrípeta.
Casos particulares de la ecuación (2.19)
1. Si sobre una partícula, FN = 0 y FT ̸= 0,no hay cambio en la dirección de la veloci-dad y el movimiento es rectilíneo acelera-do, ya que FT genera un cambio en la mag-nitud de la velocidad. Si en este caso, FTes constante, se tiene movimiento rectilíneouniformemente acelerado (MRUA)
2. Si sobre una partícula, FN = 0 y FT = 0,no cambia la dirección ni la magnitud dela velocidad y el cuerpo tiene movimientorectilíneo uniforme (MRU), o se encuentraen reposo.
3. Si sobre una partícula, FN ̸= 0 y FT = 0,no hay cambio en la magnitud de la veloci-dad, sólo cambia su dirección como en elmovimiento circular uniforme, que se ana-liza en lo que sigue.
2.7.1. Dinámica del movimiento circular
Cuando una partícula de masa m, describe unatrayectoria circular donde ρ = R y v = ωR, lascomponentes tangencial y normal de la fuerzaadquieren la forma
FT = (mαR)uT y FN = (mω2R)uN,
que no son fuerzas aplicadas sino que corres-ponden, respectivamente, a las componentestangencial y normal de la fuerza resultante.
En el caso de movimiento circular uniforme,sólo se tiene cambio en la dirección de la veloci-dad, es decir, F = FNuN.
x
y
z
O
F v
r
m
w
Figura 2.25: Vectores v, ω y F en un MCU.
En forma vectorial, para movimiento circu-lar uniforme, y de acuerdo con la figura 2.25 setiene
a = ω × v,
o sea, que la segunda ley de Newton adquierela forma
F = ma = mω × v = ω × (mv) = ω × p.
Ejemplo 2.12.El péndulo simple consiste en una partícu-la de masa m, suspendida de una cuerdade longitud S, como se ilustra en la figura.Suponga que la partícula se suelta desdeuna posición tal que la cuerda forma unángulo θo con la vertical, como se muestraen la figura siguiente. a) Dibuje las fuerzasque actúan sobre la partícula. b) Planteelas ecuaciones de movimiento. c) Deter-mine para la partícula, en función de θ, laaceleración angular, la velocidad angulary la tensión en la cuerda. d) Determine co-mo es la magnitud de las cantidades ante-riores en los extremos de la trayectoria yen su centro.
qo S
m
O
Solucióna) Diagrama de cuerpo libre para la

26 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
partícula Sobre la partícula, en la posición
mg
q
TS
Movimiento
general θ, las fuerzas que actúan son el pe-so y la tensión que ejerce la cuerda sobreella.b) La ecuación de movimiento en la direc-ción radial o centrípeta, tomando el senti-do de la tensión como positivo, es
T − mg cosθ = mω2S, (1)
y en la dirección tangencial, tomando co-mo positivo el sentido del movimientosupuesto en la figura, es
mg senθ = mαS. (2)
c) De la ecuación (2), la aceleración angu-lar de la partícula está dada por
α =gS
senθ. (3)
teniendo en cuenta la definición de acele-ración angular, la ecuación (3) se transfor-ma en
dω
dt=
gS
senθ, (4)
donde se tienen las variables ω, t y θ. Conel fin de resolver la ecuación (4) se hacenecesario eliminar la variable tiempo, yaque interesa obtener ω(θ). Multiplicandoa ambos lados de la ecuación (4) por dθ, sellega a la expresión
−ωdω =gS
senθ dθ, (5)
el signo menos en la ecuación aparece yaque en la situación de la figura, a medidaque transcurre el tiempo el ángulo θ dis-minuye.
Integrando la ecuación (5) entre loslímites ω = 0 cuando θ = θo y ω en laposición angular θ, se obtiene
ω =
√2gS(cos θ − cosθo), (6)
mediante las ecuaciones (1) y (6), se llega a
T = mg [3 cosθ − 2 cosθo] . (7)
d) De las ecuaciones (3), (6) y (7) se obtienepara los extremos A y B, donde θ = θo
α =gS
senθo,
ω = 0,
T = mg cosθo.
qo S
B
qo
A
C
Ahora, en el centro de la trayectoria Ccon θ = 0
α = 0
ω =
√2gS
(1 − cosθo),
T = mg(3 − 2 cosθo).
De estos resultados, entre las posiciones By C se tiene que al soltar la partícula desdeel punto B, la aceleración angular dismi-nuye desde un valor máximo hasta cero,mientras que la velocidad angular aumen-ta desde cero hasta un valor máximo y latensión aumenta entre estos dos puntos.Entre las posiciones C y A se presentancambios opuestos en estas cantidades. Enconclusión, donde la aceleración es máxi-ma (extremos de la trayectoria), la veloci-dad angular es mínima (cero) y vicever-sa. Igualmente, se observa que la tensiónadquiere su máximo valor en el centro dela trayectoria y el mínimo en los extremos.
Ejercicio 2.9.a) Analizar los resultados del problemaanterior suponiendo que θo = π/2 b) ¿Porqué razón en el punto C, la tensión en lacuerda no es igual al peso de la partícula?
2.8. VECTOR MOMENTO ANGULAR DE UNA PARTÍCULA 27
2.7.2. Movimiento curvilíneo en compo-nentes rectangulares
Cuando una partícula de masa m se mueve enel plano xy, la segunda ley de Newton adquierela forma
Fxi + Fyj = m(axi + ayj),
donde
ax =dvx
dt, ay =
dvy
dt,
corresponden a las componentes escalares delvector aceleración. Las respectivas compo-nentes de la fuerza se muestran en la figura.2.26.
x
y
O i
j
F
Fi
Fj
Figura 2.26: Componentes rectangulares del vectorfuerza.
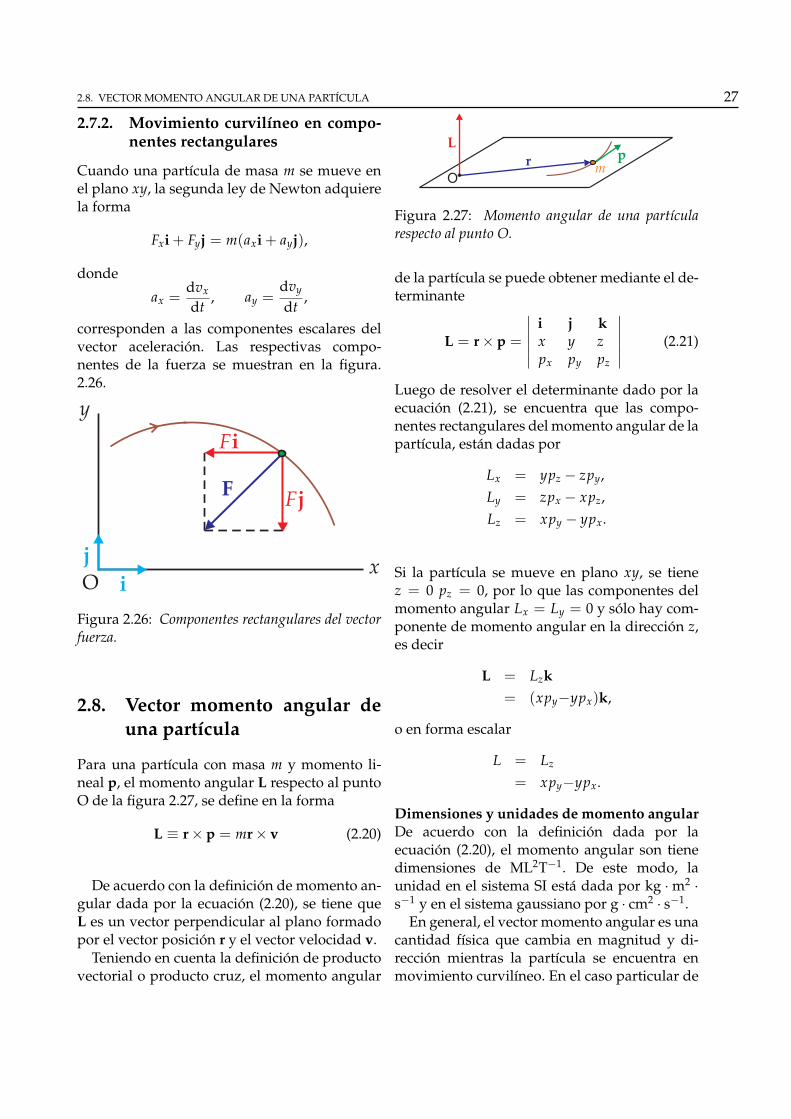
2.8. Vector momento angular deuna partícula
Para una partícula con masa m y momento li-neal p, el momento angular L respecto al puntoO de la figura 2.27, se define en la forma
L ≡ r × p = mr × v (2.20)
De acuerdo con la definición de momento an-gular dada por la ecuación (2.20), se tiene queL es un vector perpendicular al plano formadopor el vector posición r y el vector velocidad v.
Teniendo en cuenta la definición de productovectorial o producto cruz, el momento angular
O
L
r pm
Figura 2.27: Momento angular de una partícularespecto al punto O.
de la partícula se puede obtener mediante el de-terminante
L = r × p =
∣∣∣∣∣∣i j kx y zpx py pz
∣∣∣∣∣∣ (2.21)
Luego de resolver el determinante dado por laecuación (2.21), se encuentra que las compo-nentes rectangulares del momento angular de lapartícula, están dadas por
Lx = ypz − zpy,Ly = zpx − xpz,Lz = xpy − ypx.
Si la partícula se mueve en plano xy, se tienez = 0 pz = 0, por lo que las componentes delmomento angular Lx = Ly = 0 y sólo hay com-ponente de momento angular en la dirección z,es decir
L = Lzk= (xpy−ypx)k,
o en forma escalar
L = Lz
= xpy−ypx.
Dimensiones y unidades de momento angularDe acuerdo con la definición dada por laecuación (2.20), el momento angular son tienedimensiones de ML2T−1. De este modo, launidad en el sistema SI está dada por kg · m2 ·s−1 y en el sistema gaussiano por g · cm2 · s−1.
En general, el vector momento angular es unacantidad física que cambia en magnitud y di-rección mientras la partícula se encuentra enmovimiento curvilíneo. En el caso particular de
28 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
un movimiento circular, se pueden presentar lassiguientes situaciones, en lo que respecta a la di-rección:
1. Que el punto de referencia O, se encuentresobre el eje z pero fuera del plano en el cual semueve la partícula, como se ilustra en la figura2.28.
z
O
L
r
m
v
w
Figura 2.28: Dirección variable del momento angu-lar L.
En este caso, el vector momento angular Lvaría en dirección ya que el plano formado porel vector posición r y el vector velocidad v, cam-bia su orientación mientras la partícula describela trayectoria circular.
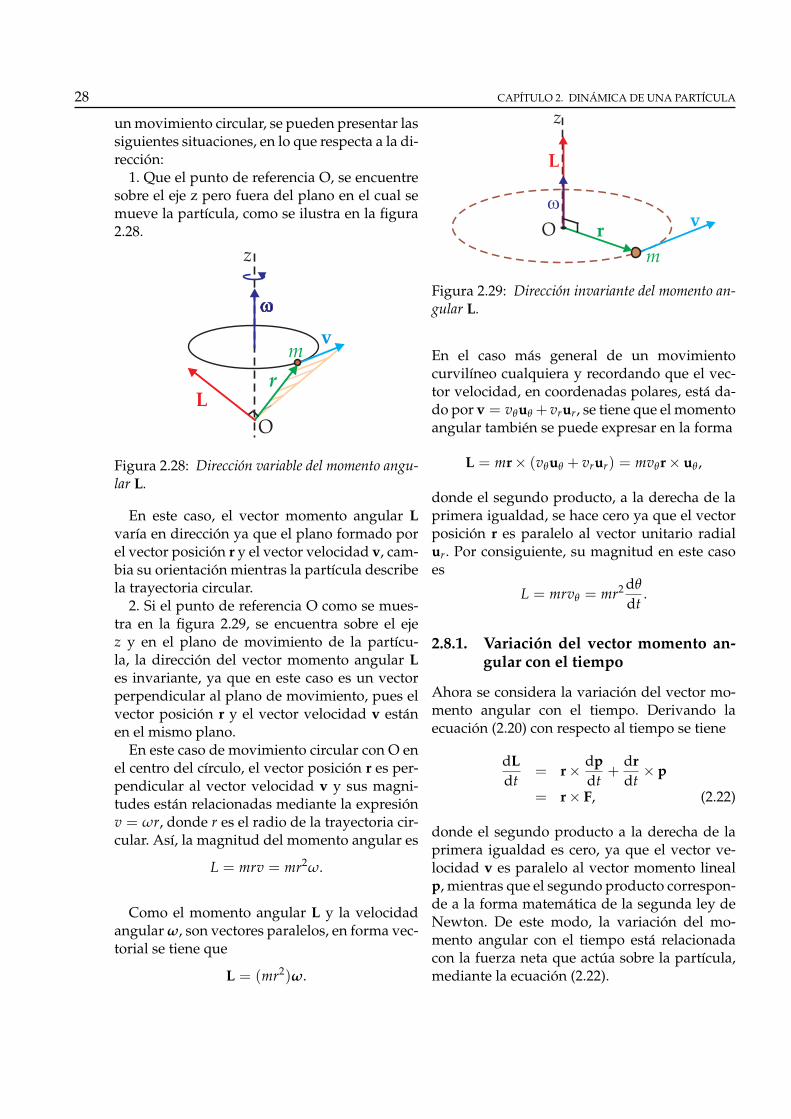
2. Si el punto de referencia O como se mues-tra en la figura 2.29, se encuentra sobre el ejez y en el plano de movimiento de la partícu-la, la dirección del vector momento angular Les invariante, ya que en este caso es un vectorperpendicular al plano de movimiento, pues elvector posición r y el vector velocidad v estánen el mismo plano.
En este caso de movimiento circular con O enel centro del círculo, el vector posición r es per-pendicular al vector velocidad v y sus magni-tudes están relacionadas mediante la expresiónv = ωr, donde r es el radio de la trayectoria cir-cular. Así, la magnitud del momento angular es
L = mrv = mr2ω.
Como el momento angular L y la velocidadangular ω, son vectores paralelos, en forma vec-torial se tiene que
L = (mr2)ω.
z
O
L
w
m
rv
Figura 2.29: Dirección invariante del momento an-gular L.
En el caso más general de un movimientocurvilíneo cualquiera y recordando que el vec-tor velocidad, en coordenadas polares, está da-do por v = vθuθ + vrur, se tiene que el momentoangular también se puede expresar en la forma
L = mr × (vθuθ + vrur) = mvθr × uθ ,
donde el segundo producto, a la derecha de laprimera igualdad, se hace cero ya que el vectorposición r es paralelo al vector unitario radialur. Por consiguiente, su magnitud en este casoes
L = mrvθ = mr2 dθ
dt.
2.8.1. Variación del vector momento an-gular con el tiempo
Ahora se considera la variación del vector mo-mento angular con el tiempo. Derivando laecuación (2.20) con respecto al tiempo se tiene
dLdt
= r × dpdt
+drdt
× p
= r × F, (2.22)
donde el segundo producto a la derecha de laprimera igualdad es cero, ya que el vector ve-locidad v es paralelo al vector momento linealp, mientras que el segundo producto correspon-de a la forma matemática de la segunda ley deNewton. De este modo, la variación del mo-mento angular con el tiempo está relacionadacon la fuerza neta que actúa sobre la partícula,mediante la ecuación (2.22).
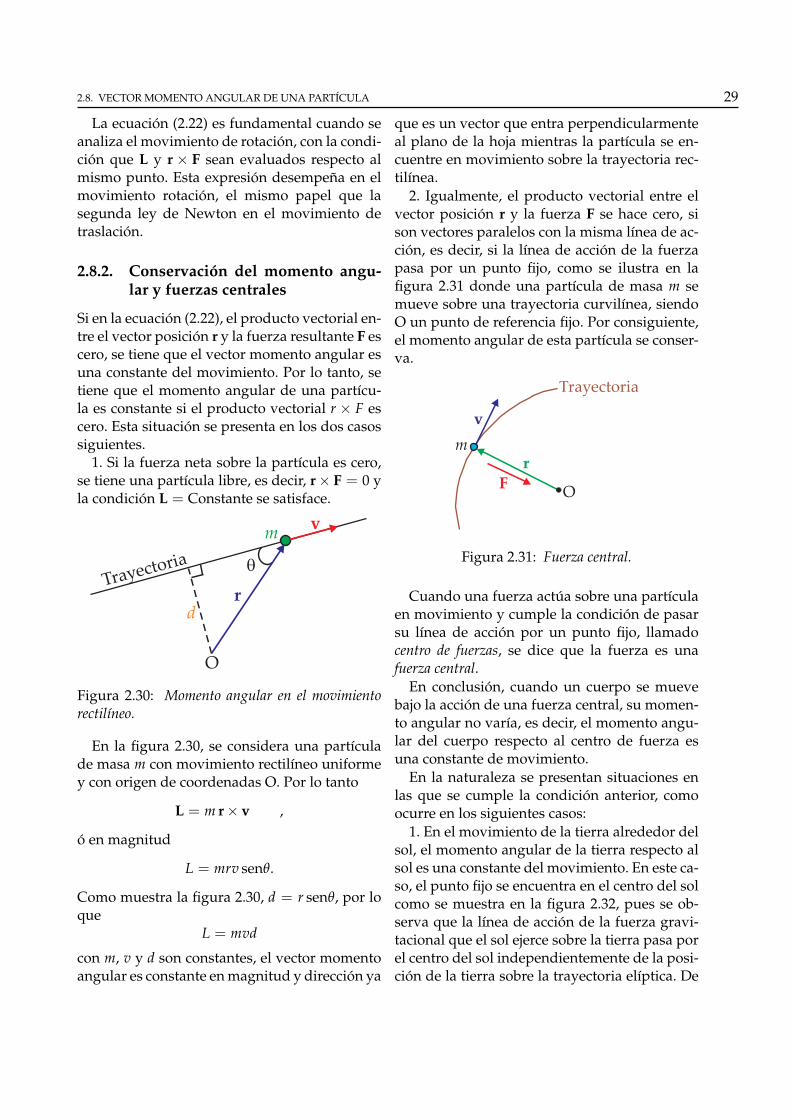
2.8. VECTOR MOMENTO ANGULAR DE UNA PARTÍCULA 29
La ecuación (2.22) es fundamental cuando seanaliza el movimiento de rotación, con la condi-ción que L y r × F sean evaluados respecto almismo punto. Esta expresión desempeña en elmovimiento rotación, el mismo papel que lasegunda ley de Newton en el movimiento detraslación.
2.8.2. Conservación del momento angu-lar y fuerzas centrales
Si en la ecuación (2.22), el producto vectorial en-tre el vector posición r y la fuerza resultante F escero, se tiene que el vector momento angular esuna constante del movimiento. Por lo tanto, setiene que el momento angular de una partícu-la es constante si el producto vectorial r × F escero. Esta situación se presenta en los dos casossiguientes.
1. Si la fuerza neta sobre la partícula es cero,se tiene una partícula libre, es decir, r × F = 0 yla condición L = Constante se satisface.
O
m
qTrayectoria
v
r
d
Figura 2.30: Momento angular en el movimientorectilíneo.
En la figura 2.30, se considera una partículade masa m con movimiento rectilíneo uniformey con origen de coordenadas O. Por lo tanto
L = m r × v ,
ó en magnitud
L = mrv senθ.
Como muestra la figura 2.30, d = r senθ, por loque
L = mvd
con m, v y d son constantes, el vector momentoangular es constante en magnitud y dirección ya
que es un vector que entra perpendicularmenteal plano de la hoja mientras la partícula se en-cuentre en movimiento sobre la trayectoria rec-tilínea.
2. Igualmente, el producto vectorial entre elvector posición r y la fuerza F se hace cero, sison vectores paralelos con la misma línea de ac-ción, es decir, si la línea de acción de la fuerzapasa por un punto fijo, como se ilustra en lafigura 2.31 donde una partícula de masa m semueve sobre una trayectoria curvilínea, siendoO un punto de referencia fijo. Por consiguiente,el momento angular de esta partícula se conser-va.
m
OF
r
v
Trayectoria
Figura 2.31: Fuerza central.
Cuando una fuerza actúa sobre una partículaen movimiento y cumple la condición de pasarsu línea de acción por un punto fijo, llamadocentro de fuerzas, se dice que la fuerza es unafuerza central.
En conclusión, cuando un cuerpo se muevebajo la acción de una fuerza central, su momen-to angular no varía, es decir, el momento angu-lar del cuerpo respecto al centro de fuerza esuna constante de movimiento.
En la naturaleza se presentan situaciones enlas que se cumple la condición anterior, comoocurre en los siguientes casos:
1. En el movimiento de la tierra alrededor delsol, el momento angular de la tierra respecto alsol es una constante del movimiento. En este ca-so, el punto fijo se encuentra en el centro del solcomo se muestra en la figura 2.32, pues se ob-serva que la línea de acción de la fuerza gravi-tacional que el sol ejerce sobre la tierra pasa porel centro del sol independientemente de la posi-ción de la tierra sobre la trayectoria elíptica. De
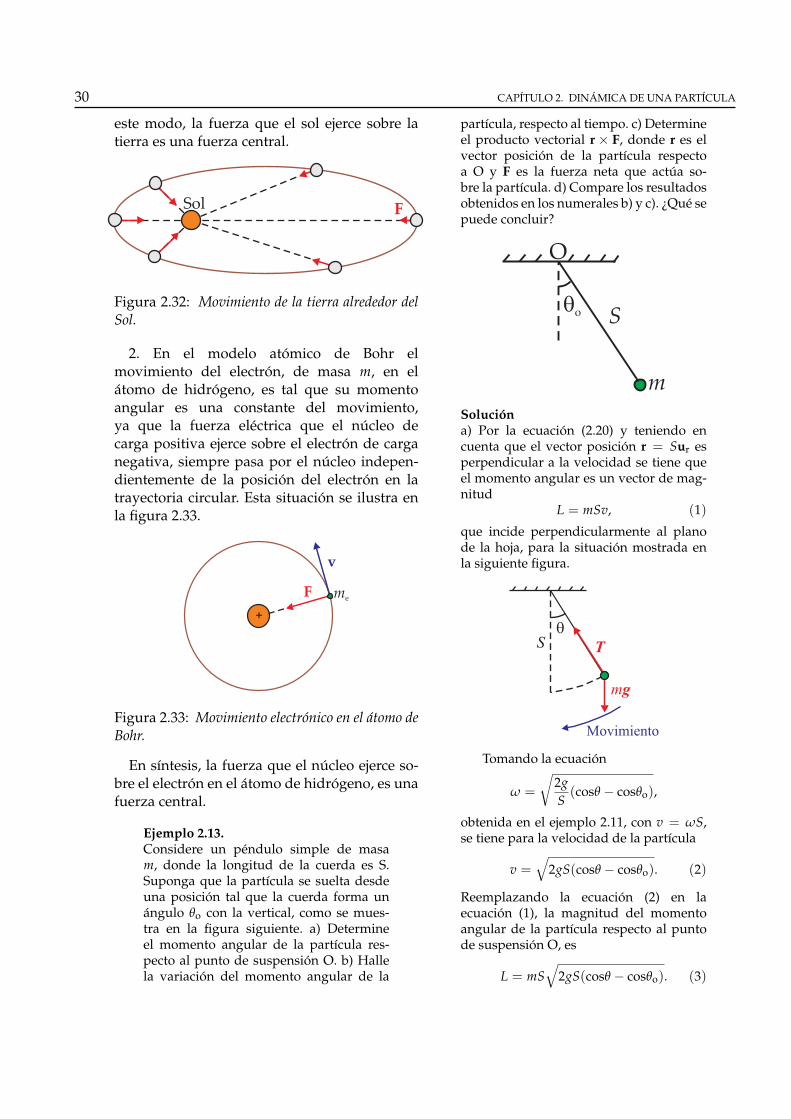
30 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
este modo, la fuerza que el sol ejerce sobre latierra es una fuerza central.
Sol F
Figura 2.32: Movimiento de la tierra alrededor delSol.
2. En el modelo atómico de Bohr elmovimiento del electrón, de masa m, en elátomo de hidrógeno, es tal que su momentoangular es una constante del movimiento,ya que la fuerza eléctrica que el núcleo decarga positiva ejerce sobre el electrón de carganegativa, siempre pasa por el núcleo indepen-dientemente de la posición del electrón en latrayectoria circular. Esta situación se ilustra enla figura 2.33.
+
F
v
me
Figura 2.33: Movimiento electrónico en el átomo deBohr.
En síntesis, la fuerza que el núcleo ejerce so-bre el electrón en el átomo de hidrógeno, es unafuerza central.
Ejemplo 2.13.Considere un péndulo simple de masam, donde la longitud de la cuerda es S.Suponga que la partícula se suelta desdeuna posición tal que la cuerda forma unángulo θo con la vertical, como se mues-tra en la figura siguiente. a) Determineel momento angular de la partícula res-pecto al punto de suspensión O. b) Hallela variación del momento angular de la
partícula, respecto al tiempo. c) Determineel producto vectorial r × F, donde r es elvector posición de la partícula respectoa O y F es la fuerza neta que actúa so-bre la partícula. d) Compare los resultadosobtenidos en los numerales b) y c). ¿Qué sepuede concluir?
qo S
m
O
Solucióna) Por la ecuación (2.20) y teniendo encuenta que el vector posición r = Sur esperpendicular a la velocidad se tiene queel momento angular es un vector de mag-nitud
L = mSv, (1)
que incide perpendicularmente al planode la hoja, para la situación mostrada enla siguiente figura.
mg
q
TS
Movimiento
Tomando la ecuación
ω =
√2gS(cosθ − cosθo),
obtenida en el ejemplo 2.11, con v = ωS,se tiene para la velocidad de la partícula
v =√
2gS(cosθ − cosθo). (2)
Reemplazando la ecuación (2) en laecuación (1), la magnitud del momentoangular de la partícula respecto al puntode suspensión O, es
L = mS√
2gS(cosθ − cosθo). (3)

2.9. *SISTEMAS DE MASA VARIABLE 31
Si se toma el eje z entrando perpendicular-mente al plano de la hoja, en forma vecto-rial la ecuación (3) se transforma en
L = mS√
2gS(cosθ − cosθo)k. (4)
b) Derivando la ecuación (4) respecto altiempo donde la única variable es el ángu-lo θ, y empleando la definición de veloci-dad angular se llega a
dLdt
= −(mgS senθ)k, (5)
o sea, es un vector que sale perpendicular-mente del plano de la hoja.
c) Como r = Sur y F = mg + TuN, aldescomponer el peso en las componentesradial y transversal con uθ = −uT y uN =−ur, se tiene para el producto vectorial
r × F = −(mgS senθ)k. (6)
Al comparar las ecuaciones (5) y (6), setiene que se cumple la relación
dLdt
= r × F,
resultado coincidente con la ecuación(2.22) y que tiene validez general.
PreguntaDe acuerdo con el resultado obtenido en el nu-meral d) del ejemplo 2.13, ¿se conserva el mo-mento angular de la partícula? Justifique su res-puesta.
2.9. *Sistemas de masa variable
En las secciones anteriores se consideraronsituaciones donde la masa de los cuerpos esconstante, por lo que la segunda ley de New-ton tiene la forma F = ma, la cual es válida so-lo para masa constante. Pero a diario se presen-tan situaciones en las cuales la masa del sistemao cuerpo en movimiento no es una constante,por ejemplo un auto, una aeronave, un trasbor-dador espacial, un bloque de hielo que deslizapor un plano inclinado, etc.
En lo que sigue, se consideran sistemas en loscuales la masa es variable y la segunda ley de
x
x
y
y
M
M - MD
v
En t
O
O
D M v+ vDu
En t+ tD
(a)
(b)
Figura 2.34: Sistema de masa variable.
Newton a utilizar es F = dp/
dt, en forma másgeneral.
Se considera que el sistema de la figura 2.34.atiene masa M, velocidad v respecto a un sistemade referencia inercial y que sobre él actúa unafuerza externa Fext., en un tiempo t.
Igualmente se supone que en un tiempo t +∆t, la configuración ha cambiado a la que semuestra en la figura 2.34.b.
Al considerar las dos situaciones anteriores,se tiene que una masa ∆M ha sido arrojada delcuerpo principal, moviéndose con velocidad urespecto al mismo sistema de referencia inercial.
Por lo tanto, la masa del cuerpo principal seha reducido a M − ∆M y la velocidad ha cam-biado a v + ∆v.
Se puede imaginar que el sistema de la figu-ra 2.34 corresponde a un cohete que arroja ga-ses calientes por un orificio a una velocidadelevada, disminuyendo su masa y aumentan-do su propia velocidad. En un cohete, la pér-dida de masa es continua durante el procesode consumo de combustible, la fuerza externaFext. no es el empuje del cohete sino la fuerza degravedad sobre él y la fuerza de resistencia quepresenta la atmósfera.
Para el análisis de la figura 2.34 se conside-rará al sistema como de masa constante, es de-cir, se consideran simultáneamente las masasM − ∆M y ∆M, así la masa total del sistema esM, lo que permite analizarlo como un sistemade masa constante y así poder obtener la segun-da ley de Newton para sistemas en los que lamasa no es constante.
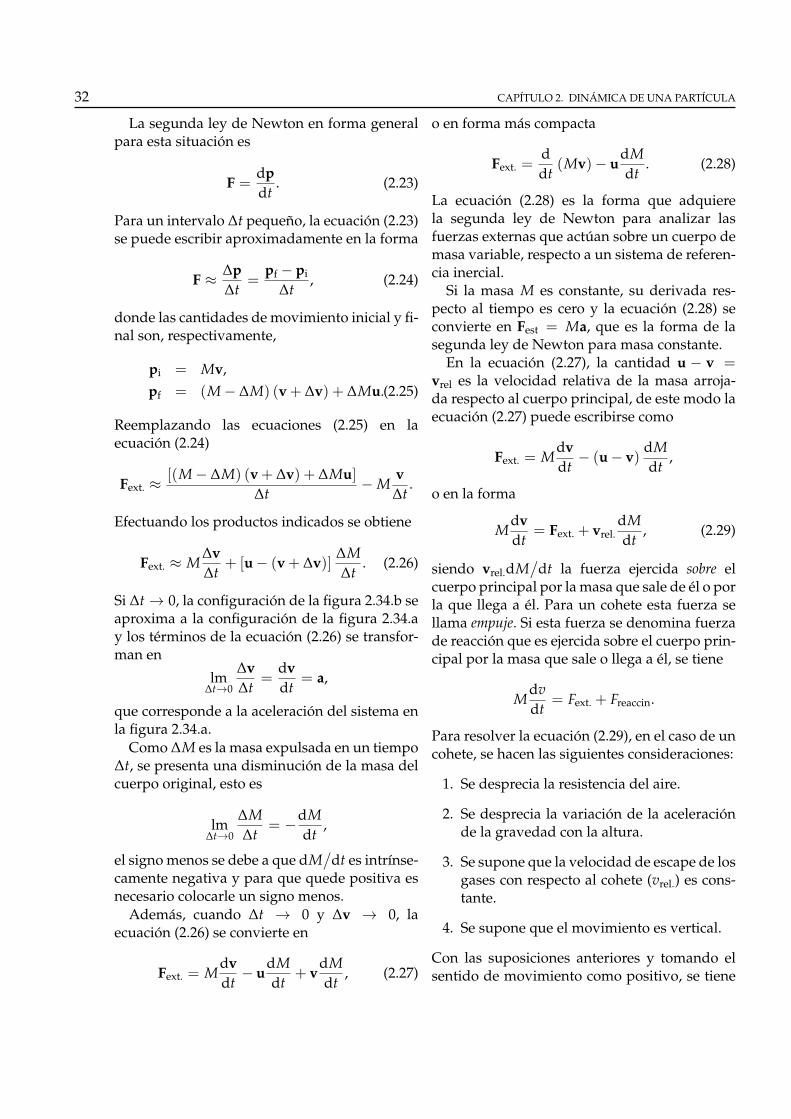
32 CAPÍTULO 2. DINÁMICA DE UNA PARTÍCULA
La segunda ley de Newton en forma generalpara esta situación es
F =dpdt
. (2.23)
Para un intervalo ∆t pequeño, la ecuación (2.23)se puede escribir aproximadamente en la forma
F ≈ ∆p∆t
=pf − pi
∆t, (2.24)
donde las cantidades de movimiento inicial y fi-nal son, respectivamente,
pi = Mv,pf = (M − ∆M) (v + ∆v) + ∆Mu.(2.25)
Reemplazando las ecuaciones (2.25) en laecuación (2.24)
Fext. ≈[(M − ∆M) (v + ∆v) + ∆Mu]
∆t− M
v∆t
.
Efectuando los productos indicados se obtiene
Fext. ≈ M∆v∆t
+ [u − (v + ∆v)]∆M∆t
. (2.26)
Si ∆t → 0, la configuración de la figura 2.34.b seaproxima a la configuración de la figura 2.34.ay los términos de la ecuación (2.26) se transfor-man en
lm∆t→0
∆v∆t
=dvdt
= a,
que corresponde a la aceleración del sistema enla figura 2.34.a.
Como ∆M es la masa expulsada en un tiempo∆t, se presenta una disminución de la masa delcuerpo original, esto es
lm∆t→0
∆M∆t
= −dMdt
,
el signo menos se debe a que dM/
dt es intrínse-camente negativa y para que quede positiva esnecesario colocarle un signo menos.
Además, cuando ∆t → 0 y ∆v → 0, laecuación (2.26) se convierte en
Fext. = Mdvdt
− udMdt
+ vdMdt
, (2.27)
o en forma más compacta
Fext. =ddt
(Mv)− udMdt
. (2.28)
La ecuación (2.28) es la forma que adquierela segunda ley de Newton para analizar lasfuerzas externas que actúan sobre un cuerpo demasa variable, respecto a un sistema de referen-cia inercial.
Si la masa M es constante, su derivada res-pecto al tiempo es cero y la ecuación (2.28) seconvierte en Fest = Ma, que es la forma de lasegunda ley de Newton para masa constante.
En la ecuación (2.27), la cantidad u − v =vrel es la velocidad relativa de la masa arroja-da respecto al cuerpo principal, de este modo laecuación (2.27) puede escribirse como
Fext. = Mdvdt
− (u − v)dMdt
,
o en la forma
Mdvdt
= Fext. + vrel.dMdt
, (2.29)
siendo vrel.dM/
dt la fuerza ejercida sobre elcuerpo principal por la masa que sale de él o porla que llega a él. Para un cohete esta fuerza sellama empuje. Si esta fuerza se denomina fuerzade reacción que es ejercida sobre el cuerpo prin-cipal por la masa que sale o llega a él, se tiene
Mdvdt
= Fext. + Freaccin.
Para resolver la ecuación (2.29), en el caso de uncohete, se hacen las siguientes consideraciones:
1. Se desprecia la resistencia del aire.
2. Se desprecia la variación de la aceleraciónde la gravedad con la altura.
3. Se supone que la velocidad de escape de losgases con respecto al cohete (vrel.) es cons-tante.
4. Se supone que el movimiento es vertical.
Con las suposiciones anteriores y tomando elsentido de movimiento como positivo, se tiene

2.9. *SISTEMAS DE MASA VARIABLE 33
v = +vj, Fext. = −mgj, vrel. = −vrel.j, así laecuación (2.29) adquiere la forma
dvdt
+vrel.
MdMdt
= −g,
donde al integrar y evaluar con to = 0 cuandola masa es Mo, se encuentra
v = vo + vrel.ln(
Mo
M
)− gt.
Por ejemplo, la velocidad del cohete cuando lamasa se reduce a la mitad, habiendo partido delreposo, es
v = vrel.ln2 − gt.
PREGUNTAS1. Un cuerpo pesa 147 N sobre la superficie dela tierra y 24.5 N sobre la superficie de la lu-na (la aceleración de la gravedad en la luna esun sexto de la gravedad en la tierra). ¿Tiene estecuerpo mayor inercia en la tierra que en la luna?Justifique la respuesta.2. Una esfera pequeña de hierro, que esta suje-ta del techo mediante una cuerda inextensible,oscila alrededor del punto medio de su trayec-toria. Si en un momento determinado se rompela cuerda, estando la esfera en la parte más bajade la trayectoria, ¿cuál es su trayectoria poste-rior? Justifique la respuesta.3. Sobre una mesa se coloca una hoja de papely encima de esta un vaso con agua. ¿Por qué elvaso permanece en reposo, cuando se tira rápi-damente la hoja de papel?4. Una persona se encuentra en el interior deun autobús que posee movimiento rectilíneo.De repente la persona es arrojada hacia la partetrasera del auto. ¿Qué se puede decir sobre losucedido? ¿Por qué?5. Un nadador que se tira desde el trampolín,experimenta un sensación de ingravidez. ¿Porqué se tiene esta sensación? ¿Acaso deja de ac-tuar la fuerza de gravedad sobre el nadador?6. Se tiene un cable sometido a tensión en susextremos. ¿Es posible que se mantenga en posi-ción horizontal? ¿Por qué?7. Un libro que se encuentra sobre una escritoriohorizontal es empujado con la mano. Haga eldiagrama de cuerpo libre para el libro. Si cada
una de las fuerzas dibujadas corresponde a laacción, ¿sobre cuál cuerpo actúa la reacción encada caso?8. Muchas veces al caminar descuidado, setropieza con un obstáculo tal como una piedra.El dolor que se percibe, ¿es consecuencia de cuálley de Newton? Justifique la respuesta.9. Un cuerpo de masa 5.0 kg, está suspendidode un dinamómetro. Un estudiante afirma quela fuerza ejercida por el dinamómetro sobre elcuerpo es 49 N y que esto es consecuencia dela tercera ley de Newton. ¿Está de acuerdo conesta afirmación? ¿Por qué?10. Un auto está en reposo sobre el piso horizon-tal de un parqueadero. ¿Es correcto afirmar quelas fuerzas que actúan sobre el auto son igualesy opuestas debido a la tercera ley de Newton?11. Desde una aeronave en vuelo, un para-caidista se lanza al vacío. a) ¿Qué movimientoadquiere el paracaidista antes de abrir el para-caídas? ¿Por qué? b) ¿Qué movimiento puedellegar a adquirir el paracaidista, un tiempo des-pués de abrir su paracaídas? ¿Por qué?12. Suponga que la luna se mueve con rapidezconstante, en una trayectoria circular alrededorde la tierra. a) ¿Tiene algo que ver el movimien-to de la luna, con la primera ley de Newton?¿Por qué? b) ¿La velocidad de la luna respec-to a la tierra es constante? ¿Por qué? c) ¿Es nulala fuerza neta sobre la luna? ¿Por qué?13. Una pequeña esfera de cobre permanecesuspendida verticalmente. ¿Se puede presentaruna situación física diferente, en la cual la ten-sión en la cuerda adquiera una valor mayor queel peso de la esfera? ¿Por qué?14. Una persona hace girar una piedra pequeña,sujeta a una cuerda, alrededor de su cabeza. a)¿Podrá lograr que la cuerda se mantenga hori-zontal? ¿Por qué? b) ¿Qué se puede decir res-pecto a la variación del momento angular de lapartícula, a medida que transcurre el tiempo?¿Por qué?