Embed Size (px)
Citation preview
Geometrie euclidienne
15. Geometrie euclidienne
15.1. Produit scalaire
15.1.1. Definition et premieres proprietes
15.1.2. Exemples classiques
15.1.3. Norme et distance associees a un produit scalaire
15.1.4. Relations entre le produit scalaire et la norme associee
15.2. Orthogonalite
15.2.1. Vecteurs unitaires, vecteurs orthogonaux
15.2.2. Produits scalaires et familles orthonormales
15.2.3. Orthogonal d’une partie de E
15.2.4. Formes lineaires et hyperplans dans un espace euclidien
15.2.5. Projections orthogonales dans un espace euclidien
15.3. Orientation, produit mixte, produit vectoriel
15.3.1. Orientation d’un espace eucliden
15.3.2. Produit mixte dans un espace euclidien oriente
15.3.3. Produit vectoriel dans l’espace oriente de dimension 3
15.4. Isometries et matrices orthogonales
15.4.1. Automorphismes orthogonaux
15.4.2. Isometries affines
15.4.3. Matrices orthogonales
15.4.4. Les groupes SO(E) et SO(n)
15.4.5. Deplacements et antideplacements
[email protected] www.mathprepa.com 19 mai 2001 Page 1
Geometrie euclidienne
15.5. Isometries en dimension 1 ou 2
15.5.1. Isometries en dimension 1
15.5.2. Matrices orthogonales d’ordre 2
15.5.3. Angles dans le plan euclidien oriente
15.5.4. Isometries du plan euclidien oriente
15.6. Similitudes du plan
15.6.1. Nombres complexes et geometrie du plan
15.6.2. Similitudes du plan
15.7. Angles et isometries en dimension 3
15.7.1. Angles en dimension 3
15.7.1. Isometries en dimension 3
15.8. Cercles, spheres
15.8.1. Cercles dans le plan. Generalites.
15.8.2. Intersections de droites et de cercles
15.8.3. Proprietes angulaires
15.8.4. Representation polaire ou parametrique
15.8.5. Exemples de lignes de niveaux
15.8.6. Complement : cercle inscrit, cercles exinscrits
15.8.7. Spheres dans l’espace
[email protected] www.mathprepa.com 19 mai 2001 Page 2

Geometrie euclidienne
15. Geometrie euclidienneDans ce chapitre, E est un espace vectoriel sur IR.
15.1. Produit scalaire
15.1.1. Definition et premieres proprietes
Definition (Produit scalaire)
On dit que l’application f : E × E → IR est un produit scalaire si :
(a) ∀ (u, u′, v, v′) ∈ E4, ∀ (α, β) ∈ IR2,
f(αu+ βu′, v) = αf(u, v) + βf(u′, v) : on dit que f est lineaire a gauche.
f(u, αv + βv′) = αf(u, v) + βf(u, v′) : on dit que f est lineaire a droite.
(b) ∀ (u, v) ∈ E2, f(v, u) = f(u, v) : on dit que f est symetrique.
(c) ∀u ∈ E, f(u, u) ∈ IR+ : on dit que f est positive.
(d) ∀u ∈ E, f(u, u) = 0 ⇔ u =−→0 : on dit que f est definie.
Definition (Espace euclidien)
Un IR-espace vectoriel E muni d’un produit scalaire est dit prehilbertien reel.
Un espace euclidien est un espace prehilbertien reel de dimension finie.
Remarques
• La propriete (a) s’enonce en disant que f est bilineaire.
• Un produit scalaire sur E est donc une forme bilineaire symetrique definie positive.
• Si le caractere symetrique de f est etabli, la linearite a droite equivaut a la linearite a gauche :le point (a) de la definition peut alors etre simplifie.
• Plutot que de noter f(u, v), on note souvent < u, v >, ou u · v, ou (u | v).
Avec la notation (· | ·), que nous utiliserons, la definition d’un produit scalaire devient :
∀ (u, u′, v, v′) ∈ E4, ∀ (α, β) ∈ IR2(αu+ βu′ | v) = α (u | v) + β (u′ | v)
(u | αv + βv′) = α (u | v) + β (u | v′)
(v | u) = (u | v) ; (u | u) ≥ 0 ; (u | u) = 0 ⇔ u =−→0
• Si E est un espace vectoriel euclidien, alors tout sous-espace vectoriel F de E est encoreeuclidien, avec la restriction du produit scalaire.
Proposition (Inegalite de Cauchy-Schwarz)
Soit (· | ·) un produit scalaire sur E.
Alors ∀ (u, v) ∈ E2, (u | v)2 ≤ (u | u) (v | v).De plus, il y a egalite si et seulement si u et v sont lies.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 3

Geometrie euclidienne
15.1.2. Exemples classiques
Produit scalaire canonique sur IRn
Soient u = (x1, . . . , xn) et v = (y1, . . . , yn) deux elements quelconques de IRn.
L’application : (u, v) 7→n∑
k=1
xk yk est le produit scalaire canonique de IRn.
“Cauchy-Schwarz” s’ecrit alors :
∀ (x1, x2, . . . , xn) ∈ IRn
∀ (y1, y2, . . . , yn) ∈ IRn ,( n∑
k=1
xk yk
)2
≤n∑
k=1
x2k
n∑k=1
y2k.
Si on note [u] la matrice-colonne associee a tout vecteur u de IRn, alors (u | v) = T[u] [v].
Un produit scalaire entre applications continues
Soit E = C([a, b], IR) l’espace vectoriel des applications continues de [a, b] dans IR, avec a < b.
L’application (f, g) 7→∫ b
a
f(t) g(t) dt est un produit scalaire.
“Cauchy-Schwarz” s’ecrit alors : ∀ (f, g) ∈ E2,
(∫ b
a
f(t) g(t) dt
)2
≤∫ b
a
f(t)2 dt
∫ b
a
g(t)2 dt
Un produit scalaire entre applications continues periodiques
Soit E est le IR-espace vectoriel des applications f : IR → IR, continues et 2π-periodiques.
L’application (f, g) 7→ 1
2π
∫ 2π
0
f(t) g(t) dt est un produit scalaire sur E.
15.1.3. Norme et distance associees a un produit scalaire
Proposition (Norme euclidienne associee a un produit scalaire)
Soit (· | ·) un produit scalaire sur E. On pose : ∀u ∈ E, ‖u‖ =√
(u | u).Cette application verifie :
∀u ∈ E, ‖u‖ ≥ 0, et ‖u‖ = 0 ⇔ u =−→0 .
∀u ∈ E, ∀λ ∈ IR, ‖λu‖ = |λ| ‖u‖. ∀ (u, v) ∈ E2, ‖u+ v‖ ≤ ‖u‖+ ‖v‖ (inegalite triangulaire, ou de Minkowski.)
On exprime ces proprietes en disant que l’application x 7→ ‖x‖ est une norme sur E.
On l’appelle norme euclidienne associee au (ou deduite du) produit scalaire (· | ·).
Remarques
• L’inegalite de Cauchy-Schwarz s’ecrit maintenant : ∀ (u, v) ∈ E2, |(u | v)| ≤ ‖u‖ ‖v‖.
• Pour tous vecteurs u et v de E, on a :∣∣∣ ‖u‖ − ‖v‖ ∣∣∣ ≤ ‖u± v‖.
• Avec nos deux premiers exemples de produit scalaire, les normes associees s’ecrivent :
Sur IRn : ‖u‖ =
√n∑
k=1
x2k , et sur C([a, b], IR) : ‖f‖ =
√∫ b
a
f(t)2 dt.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 4

Geometrie euclidienne
Definition (Distance associee a un produit scalaire)
Soit (· | ·) un produit scalaire sur E, et soit u 7→ ‖u‖ la norme associee.
L’application d : E×E → IR, definie par d(u, v) = ‖u− v‖ verifie les proprietes suivantes :
∀ (u, v, w) ∈ E3,
d(u, v) = d(v, u) ; d(u, v) ≥ 0 ; d(u, v) = 0 ⇔ u = v
d(u, v) ≤ d(u,w) + d(w, v) (inegalite triangulaire)
On exprime ces proprietes en disant que l’application d est une distance, dite associee a lanorme euclidienne, et donc au produit scalaire.
Remarques
• La notion de distance est surtout utilisee dans le cadre de la geometrie affine.
On parle alors de la distance d(A,B) de deux points A et B : elle est egale a ‖−→AB‖.
• Dans ces conditions, on a : d(A,B) ≤ d(A,C) + d(C,B) et il y a egalite si et seulement siles points A,B,C sont alignes.
• La distance associee a la norme euclidienne est invariante par translation.
Cela signifie que pour tous vecteurs u, v, w, on a : d(v, w) = d(v + u,w + u).
Dans le langage de la geometrie affine, on a donc : d(tu(A), tu(B)) = d(A,B).
15.1.4. Relations entre le produit scalaire et la norme associee
Proposition (Identites du parallelogramme et de polarisation)
Soit E un IR-espace vectoriel, muni d’un produit scalaire (· | ·).
∀ (u, v) ∈ E2, ∀ (α, β) ∈ IR2 on a : ‖αu+ βv‖2 = α2 ‖u‖2 + 2αβ (u | v) + β2 ‖v‖2.
En particulier,
‖u+ v‖2 = ‖u‖2 + 2 (u | v) + ‖v‖2
‖u− v‖2 = ‖u‖2 − 2 (u | v) + ‖v‖2
Par addition, on en deduit : ∀ (u, v) ∈ E2, ‖u+ v‖2 + ‖u− v‖2 = 2(‖u‖2 + ‖v‖2).
Cette egalite est connue sous le nom d’identite du parallelogramme.
On a egalement les identites de polarisation, qui permettent d’exprimer le produit scalaireen fonction de la norme euclidienne :
∀ (u, v) ∈ E2, (u | v) = 12
(‖u+ v‖2 − ‖u‖2 − ‖v‖2) = 1
4(‖u+ v‖2 − ‖u− v‖2).
Interpretations geometriques
• Pour tous points A,B,C, la premiere identite de polarisation donne :
(−→AB | −→AC) = 1
2(‖−→AB‖2 + ‖−→AC‖2 − ‖−−→BC‖2)
• Soit ABCD un parallelogramme. L’identite dite du parallelogramme donne :
‖−→AC‖2 + ‖−−→BD‖2 = 2(‖−→AB‖2 + ‖−−→CD‖2) = ‖−→AB‖2 + ‖−−→BC‖2 + ‖−−→AD‖2 + ‖−−→DA‖2
Ainsi, dans un parallelogramme, la somme des carres des longueurs des quatre cotes est egalea la somme des carres des longueurs des deux diagonales.
[email protected] www.mathprepa.com 19 mai 2001 Page 5

Geometrie euclidienne
15.2. OrthogonaliteE est un IR-espace vectoriel muni d’un produit scalaire (· | ·) et de la norme associee.
15.2.1. Vecteurs unitaires, vecteurs orthogonaux
DefinitionUn vecteur u de E est dit unitaire (ou encore norme) si ‖u‖ = 1.
Deux vecteurs u et v de E sont dits orthogonaux si (u | v) = 0.
Remarques
• Ces notions dependent evidemment du produit scalaire utilise sur E.
Si on en change, les vecteurs qui etaient orthogonaux ne le sont donc plus necessairement.
• Si u 6= −→0 , les vecteurs ± u
‖u‖ sont unitaires, et ce sont les seuls de la droite IRu.
• La definition de l’orthogonalite est symetrique car (v | u) = (u | v).
• Le seul vecteur u qui est orthogonal a lui-meme est le vecteur nul.
A fortiori, le seul vecteur u qui est orthogonal a tous les vecteurs de E est u =−→0 .
Definition (Familles orthogonales ou orthonormales)
On dit qu’une famille (ui)i∈I de vecteurs de E est orthogonale si les ui sont orthogonauxdeux a deux. Si de plus ils sont unitaires, alors la famille est dite orthonormale.
Definition (Bases et reperes orthonormaux)
Soit (e) = e1, . . . , en une base de E.
Si c’est une famille orthonormale, on dit que c’est une base orthonormale de E.
Un repere cartesien (Ω, (e)) est dit orthonormal si la base (e) est orthonormale.
Remarques et proprietes
• La famille (ui)i∈I est orthonormale ⇔ ∀ (i, j) ∈ I2, (ui | uj) = δij (Kronecker).
• Si la famille (ui)i∈I est orthogonale et formee de vecteurs non nuls, c’est une famille libre.
C’est le cas en particulier d’une famille (ui)i∈I orthonormale.
Si dimE = n ≥ 1, une famille orthonormale de n vecteurs est une base orthonormale.
• La base canonique de IRn est une base orthonormale, pour le produit scalaire canonique.
• Soit E un IR-espace vectoriel de dimension n, muni d’une base (e) = e1, . . . , en.
Pour tous vecteurs u =n∑
k=1
xkek et v =n∑
k=1
ykek de E, on pose (u | v) =n∑
k=1
xkyk.
On definit ainsi un produit scalaire sur E, pour lequel la base (e) est orthonormale.
• Si la famille (uk)1≤ k≤p est orthogonale, alors∥∥∥ p∑
k=1
uk
∥∥∥2
=p∑
k=1
‖uk‖2 (Relation de Pythagore.)
La reciproque n’est vraie que si p = 2. Ainsi (u | v) = 0 ⇔ ‖u+ v‖2 = ‖u‖2 + ‖v‖2.
Ou encore : le triangle ABC est rectangle en A ⇔ ‖−→AB‖2 + ‖−→AC‖2 = ‖−−→BC‖2.
[email protected] www.mathprepa.com 19 mai 2001 Page 6

Geometrie euclidienne
15.2.2. Produits scalaires et familles orthonormales
Proposition (Procede d’orthonormalisation de Schmidt)
Dans tout espace vectoriel euclidien E, il y a des bases orthonormales.
Plus precisement, soit (ek)1≤ k≤n une base de E.
Alors il existe une et une seule base orthonormale (εk)1≤ k≤n telle que :
• ∀ k ∈ 1, . . . , n, Vect ε1, . . . , εk = Vect e1, . . . , ek• ∀ k ∈ 1, . . . , n, (εk | ek) > 0
Cette base orthonormale (ε) est obtenue de la maniere suivante :
ε1 =1
‖e1‖e1 et ∀ k ∈ 2, . . . , n, εk =
1
‖uk‖uk ou uk = ek −
k−1∑j=1
(εj | ek) εj
Remarques
• Par construction, la matrice de passage de la base (e) a la base (ε) est triangulaire superieurea coefficients diagonaux strictement positifs.
• Soit F un sous-espace vectoriel de E, de dimension p, avec 1 ≤ p ≤ n.
Toute base de F peut etre transformee en une base orthonormale de F .
• Soit e1, e2, . . . , ep une famille orthonormale non generatrice de E.
On peut la completer en une base orthonormale e1, e2, . . . , ep, ep+1, . . . , en de E.
Illustration du procede
• On a illustre ci-dessous, dans un espace euclidien de dimension 3, le passage d’une base(e) = e1, e2, e3 a une base orthonormale (ε) = ε1, ε2, ε3.
• On a conserve les notations de la proposition en ce qui concerne les vecteurs u2 et u3.
On a cependant note p(e2) = (ε1 | e2) ε1, donc u2 = e2 − p(e2).
De meme, on a note q(e3) = (ε1 | e3) ε1 + (ε2 | e3) ε2, donc u3 = e3 − q(e3).
• On voit bien, ce qui sera repris plus tard, que p(e2) est la “projection orthogonale” de e2 surla droite engendree par ε1 (donc par e1), et que q(e3) est la projection orthogonale de e3 surle plan engendre par ε1, ε2 (donc par e1, e2).
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 7

Geometrie euclidienne
Proposition (Expressions des coordonnees dans une base orthonormale)
Soit (ek)1≤ k≤n une base orthonormale de E. Pour tout u de E, on a : u =n∑
k=1
(ek | u) ek.
Remarques
• On voit que tout vecteur u de E est entierement determine par la donnee de ses produitsscalaires avec les vecteurs de la base orthonormale (e).
• On voit egalement que les applications coordonnees dans la base (e), c’est-a-dire les formeslineaires e∗k de la base duale, sont les applications : x 7→ e∗k(x) = (ek | x).
Proposition (Expressions du produit scalaire et de la norme dans une base orthonormale)
Soit (ek)1≤ k≤n une base orthonormale de E. Soient u =n∑
k=1
xk ek et v =n∑
k=1
yk ek.
Alors on a (u | v) =n∑
k=1
xk yk et ‖u‖2 =n∑
k=1
x2k.
Remarques
• On obtient les memes expressions que dans IRn muni de son produit scalaire canonique.
• On a encore (u | v) = T[u][v] avec les matrices-colonnes [u], [v] des coordonnees.
15.2.3. Orthogonal d’une partie de E
E designe un IR-espace vectoriel, muni d’un produit scalaire (· | ·) et de la norme associee.
DefinitionSoit A une partie non vide de E. On appelle orthogonal de A, et on note A⊥, l’ensemble desvecteurs u de E qui sont orthogonaux a tous les elements de A.
Deux parties A et B de E sont dites orthogonales si : ∀ a ∈ A, ∀ b ∈ B, (a | b) = 0.
Cela equivaut a B ⊂ A⊥, ou encore a A ⊂ B⊥.
Proprietes
• On a −→0 ⊥ = E, et E⊥ = −→0 . Si A ⊂ B, alors B⊥ ⊂ A⊥.
• A⊥ est toujours un sous-espace vectoriel de E, meme si A n’en est pas un.
• On a A⊥ = Vect (A)⊥. En particulier, si A = Vect ej, j ∈ J, alors un vecteur u de E estdans A⊥ si et seulement si u est orthogonal a tous les vecteurs ej.
• Si F est un sous-espace vectoriel de E, alors F ∩F⊥ = −→0 : la somme F +F⊥ est directe.
• On a toujours l’inclusion A ⊂ A⊥⊥ (A est inclus dans son double orthogonal).
Cette inclusion peut-etre stricte, notamment si A n’est pas un sous-espace vectoriel de E.
Proposition et definition (Sommes directes orthogonales)
Soit (Fj)j∈J une famille de sous-espaces vectoriels de E, orthogonaux deux a deux.
Alors la somme G =∑Fj est directe.
On dit qu’il s’agit d’une somme directe orthogonale, et on note G = ⊕⊥Fj.
[email protected] www.mathprepa.com 19 mai 2001 Page 8

Geometrie euclidienne
Definition (Sous-espaces affines orthogonaux)
Deux sous-espaces affines sont dits orthogonaux si leurs directions sont orthogonales.
Remarques
• Deux sous-espaces affines orthogonaux peuvent tres bien avoir une intersection vide.
• Si A ∈ F ∩ G, alors F et G sont orthogonaux ⇔ ∀ (M,N) ∈ F × G, (−−→AM | −−→AN) = 0.
Proposition et definition (Supplementaire orthogonal d’un sous-espace vectoriel)
Soit F un sous-espace vectoriel d’un espace euclidien E. Alors E = F ⊕ F⊥.
F⊥ (parfois note F o) est alors appele le supplementaire orthogonal de F .
Remarques
• Le resultat precedent reste vrai si on suppose seulement que F est de dimension finie.
• On a l’egalite F = F⊥⊥ : F est donc egal a son double orthogonal.
Ainsi F est le supplementaire orthogonal de F⊥.
• Si B est une base orthonormale de F et si B′ est une base orthonormale de F⊥, alors B ∪ B′(obtenue par juxtaposition) est une base orthonormale de E.
Reciproquement, si on complete une base orthonormale e1, . . . , ep de F en un base orthonor-male e1, . . . , ep, . . . , en de E, alors ep+1, . . . , en est une base orthonormale de F⊥.
• Exemple :
On suppose ici dimE = 3.
Le plan P et la droite D sont
supplementaires l’un de l’autre.
Si e1, e2 est une base de P et
si e3 est une base de D, alors
e1, e2, e3 est une base orthonormale de E
si et seulement si e1, e2 est une
base orthonormale de P et e3 est unitaire.
15.2.4. Formes lineaires et hyperplans dans un espace euclidien
Dans ce paragraphe, E est un espace euclidien.
Proposition (Representation des formes lineaires)
Soit a un vecteur de E. L’application u 7→ fa(u) = (a | u) est une forme lineaire sur E.
Le noyau de fa est E si a =−→0 et l’hyperplan (IRa)⊥ sinon.
Reciproquement, soit f une forme lineaire sur E (donc un element du dual E∗.)
Alors il existe un unique vecteur a de E tel que f = fa.
Ainsi l’application a 7→ fa est un isomorphisme de E sur son dual E∗.
[email protected] www.mathprepa.com 19 mai 2001 Page 9

Geometrie euclidienne
Applications aux hyperplans
• Normales a un hyperplan affine
Soit H un hyperplan affine de E, de direction H.
Le supplementaire orthogonal de H est une droite vectorielle D.
On dit que la droite vectorielle D est la normale a l’hyperplan vectoriel H.
Tout droite affine D de direction D est appelee une normale a l’hyperplan affine H.
On dit qu’un vecteur directeur a de D est un vecteur normal a H, ou a H.
• Equations d’hyperplans
Soit H un hyperplan affine de E, de direction H.
On suppose que E est muni d’une base orthonormale (e). Soit a =n∑
k=1
akek 6=−→0 .
Les condition suivantes sont equivalentes :
Le vecteur a est normal a l’hyperplan H.
Une equation de H est (a | u) = 0, c’est-a-diren∑
k=1
akxk = 0.
Une equation de H est (a | u) = λ (λ ∈ IR) c’est-a-diren∑
k=1
akxk = λ.
• Exemples
On se place dans un espace euclidien E de dimension 3, muni d’une base orthonormale.
La normale au plan vectoriel d’equation 2x+ 5y − 3z = 0 est dirigee par a = (2, 5,−3).
Soit P le plan affine orthogonal au vecteur a = (1, 3,−2) et passant par Ω(4,−5,−7).
Le plan P a pour equation (x− 4) + 3(y + 5)− 2(z + 7) = 0, donc x+ 3y − 2z = 3.
Soient P1 et P2 deux plans affines de E, de directions P1 et P2.
On dit que P1 et P2 sont perpendiculaires si P⊥1 ⊂ P2, c’est-a-dire si P⊥
2 ⊂ P1.
Cela signifie que l’un des plans contient une normale a l’autre.
Cela equivaut aussi a dire que leurs normales sont des droites orthogonales.
Supposons que les equations de P1 et P2 soient
a1x+ b1y + c1z = λ1
a2x+ b2y + c2z = λ2
Alors P1 et P2 sont perpendiculaires si et seulement si a1a2 + b1b2 + c1c2 = 0.
On a represente ici deux plans P1 et P2.
Ces plans se coupent suivant une droite ∆.
Soit Ω un point de la droite ∆.
Puisque la droite D1 passant par Ω et
orthogonale a P2 est dans P1,
Les plans P1 et P2 sont perpendiculaires.
De meme, la droite D2 passant par Ω et
orthogonale a P1 est dans P2.
[email protected] www.mathprepa.com 19 mai 2001 Page 10

Geometrie euclidienne
15.2.5. Projections orthogonales dans un espace euclidien
Proposition et definition (Projection orthogonale sur un sous-espace vectoriel)
Soit F un sous-espace vectoriel de l’espace euclidien E.
La projection pF sur F parallelement a F⊥ est appelee projection orthogonale sur F .
Soit (e) = e1, . . . , ep une base orthonormale de F .
Alors pour tout vecteur u de E, on a l’egalite : pF (u) =p∑
k=1
(ek | u) ek.
Exemples et remarques
• Si p est la projection orthogonale sur F , celle sur F⊥ est Id− p.
• Soit a 6= −→0 dans E. La projection orthogonale sur la droite IRa est pa : u 7→ pa(u) =
(a | u)‖a‖2 a.
Evidemment, si a est unitaire, pa(u) = (a | u) a.
La projection orthogonale de E sur H = (IRa)⊥ est : pH : u 7→ pH(u) = u− (a | u)‖a‖2 a.
On suppose ici dimE = 3.
e1, e2 est une base orthonormale du plan P .
e3 est un vecteur unitaire de la droite P⊥.
On s’est donne un vecteur u de E.
Chaque uk = (ek | u) ek est la projection
orthogonale de u sur la droite engendree par ek.
Le vecteur u1 + u2 = (e1 | u) e1 + (e2 | u) e2est la projection orthogonale de u sur le plan P .
• Retour au procede de Schmidt
Soit e1, e2, . . . , en une famille libre de E.
Le procede de Schmidt permet de la transformer en une famille orthonormee ε1, ε2, . . . , εn.
La formation du vecteur εk peut etre interpretee de la maniere suivante :
Soit Fk = Vect (e1, . . . , ek−1) = Vect (ε1, . . . , εk−1).
La projection orthogonale wk de ek sur Fk est donnee par wk =k−1∑j=1
(εj | ek) εj.
On en deduit vk = ek − wk, orthogonal a Fk et non nul.
Il suffit alors de normer le vecteur vk pour obtenir εk.
Proposition (Caracterisations des projections orthogonales)
Soit p une projection vectorielle de l’espace euclidien E.
Les conditions suivantes sont equivalentes :
La projection p est une projection orthogonale.
Pour tous vecteurs u, v de E, on a l’egalite (p(u) | v) = (u | p(v)). La matrice de p dans toute base orthonormale est symetrique.
La matrice de p dans une base orthonormale est symetrique.
[email protected] www.mathprepa.com 19 mai 2001 Page 11
Geometrie euclidienne
Proposition (Une autre caracterisation des projections orthogonales)
Soit p une projection vectorielle de l’espace euclidien E.
L’application p est une projection orthogonale si et seulement si : ∀u ∈ E, ‖p(u)‖ ≤ ‖u‖.
Definition (Projection orthogonale sur un sous-espace affine)
Soit F un sous-espace affine de E, de direction F .
La projection pF sur F parallelement a F⊥ est appelee projection affine orthogonale sur F .
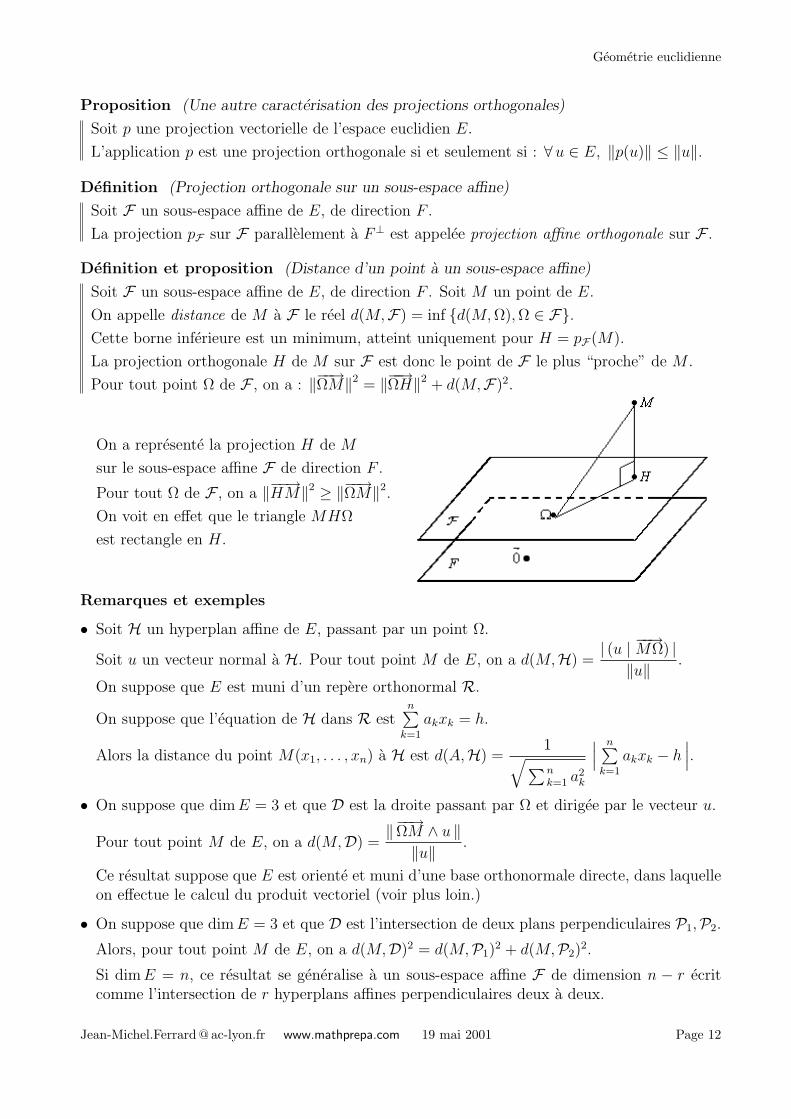
Definition et proposition (Distance d’un point a un sous-espace affine)
Soit F un sous-espace affine de E, de direction F . Soit M un point de E.
On appelle distance de M a F le reel d(M,F) = inf d(M,Ω),Ω ∈ F.Cette borne inferieure est un minimum, atteint uniquement pour H = pF(M).
La projection orthogonale H de M sur F est donc le point de F le plus “proche” de M .
Pour tout point Ω de F , on a : ‖−−→ΩM‖2 = ‖−−→ΩH‖2 + d(M,F)2.
On a represente la projection H de M
sur le sous-espace affine F de direction F .
Pour tout Ω de F , on a ‖−−→HM‖2 ≥ ‖−−→ΩM‖2.
On voit en effet que le triangle MHΩ
est rectangle en H.
Remarques et exemples
• Soit H un hyperplan affine de E, passant par un point Ω.
Soit u un vecteur normal a H. Pour tout point M de E, on a d(M,H) =| (u | −−→MΩ) |
‖u‖.
On suppose que E est muni d’un repere orthonormal R.
On suppose que l’equation de H dans R estn∑
k=1
akxk = h.
Alors la distance du point M(x1, . . . , xn) a H est d(A,H) =1√ ∑nk=1 a
2k
∣∣∣ n∑k=1
akxk − h∣∣∣.
• On suppose que dimE = 3 et que D est la droite passant par Ω et dirigee par le vecteur u.
Pour tout point M de E, on a d(M,D) =‖−−→ΩM ∧ u ‖
‖u‖.
Ce resultat suppose que E est oriente et muni d’une base orthonormale directe, dans laquelleon effectue le calcul du produit vectoriel (voir plus loin.)
• On suppose que dimE = 3 et que D est l’intersection de deux plans perpendiculaires P1,P2.
Alors, pour tout point M de E, on a d(M,D)2 = d(M,P1)2 + d(M,P2)
2.
Si dimE = n, ce resultat se generalise a un sous-espace affine F de dimension n − r ecritcomme l’intersection de r hyperplans affines perpendiculaires deux a deux.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 12

Geometrie euclidienne
Perpendiculaire commune a deux droites non paralleles de l’espace
On suppose ici dimE = 3. Soient D1,D2 deux droites non paralleles.
Soit e3 un vecteur non nul orthogonal aux directions de D1 et D2.
Il existe une unique droite ∆ qui rencontre
orthogonalement D1 et D2.
C’est la perpendiculaire commune a D1 et D2.
La droite ∆ est l’intersection des plans
P1 (contenant D1 et la direction de e3.)
et P2 (contenant D2 et la direction de e3.)
Soient A1 = D1 ∩∆ et A2 = D2 ∩∆.
d(A1, A2) est la plus courte distance
d’un point de D1 a un point de D2.
On la note d(D1,D2).
Avec ces notations, on a d(D1,D2) =|(−−−−→M1M2, e3)|
‖e3‖pour tous M1 de D1 et M2 de D2.
Hyperplan mediateur de deux pointsSoient A,B deux points de l’espace euclidien E.
Soit H = M ∈ E, d(M,A) = d(M,B).H est un hyperplan, appele
hyperplan mediateur du segment [A,B].
Il passe par le milieu I de [A,B] et est
orthogonal a−→AB.
On a d(A,H) = d(B,H) = 12d(A,B).
Si dimE = 2, H est la mediatrice de [A,B].
15.3. Orientation, produit mixte, produit vectoriel
15.3.1. Orientation d’un espace euclidien
Definition et proposition (Orientation d’un espace vectoriel)
Soit E un espace vectoriel de dimension n ≥ 1.
Soient B et B′ deux bases de E. Soit P la matrice de passage de B a B′.Si detP > 0, on dit que la base B′ a la meme orientation que la base B.
On definit ainsi une relation d’equivalence sur l’ensemble des bases de E.
Pour cette relation, il y a exactement deux classes d’equivalence.
Orienter E, c’est choisir l’une de ces deux classes.
Les bases de la classe d’equivalence choisie sont dites directes.
Les bases de l’autre classe d’equivalence sont dites indirectes.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 13
Geometrie euclidienne
Remarques
• Supposons que la base B′ se deduise de B par une permutation σ sur les vecteurs de B.
Si σ est une transposition, alors B et B′ sont d’orientation contraire.
Si σ est paire, les bases B et B′ sont de meme orientation.
Si σ est impaire, alors elles sont d’orientation contraire.
• Supposons qu’on passe de B a B′ en changeant un vecteur en son oppose.
Alors les bases B et B′ sont d’orientation contraire.
• Par exemple, supposons que (u, v) soit une base directe de E, avec dimE = 2.
Les bases (−u, v), (u,−v), (v, u) et (−v,−u) sont indirectes.
Les bases (u, v), (−u,−v), (v,−u)), et (−v, u) sont directes.
• De meme, supposons que (u, v, w) soit une base directe de E, avec dimE = 3.
Les bases (−u, v, w), (u,−v, w), (u, v,−w) et (−u,−v,−w) sont indirectes.
Les bases (v, u, w), (w, v, u), (u,w, v) sont indirectes, etc.
Les bases (u, v, w), (u,−v,−w), (−u, v,−w), et (−u,−v, w) sont directes.
Les bases (v, w, u), (w, u, v) sont directes, etc.
• Il y a donc toujours deux orientations possibles sur un espace vectoriel de dimension finie.
Le choix de la classe des bases dites positives est arbitraire. Neanmoins, des regles empiriquesconferent une orientation traditionnelle aux espaces vectoriels de dimension 2 ou 3.
• Soit E un espace euclidien oriente.
Dans E, il y a des bases orthonormales directes et des bases orthonormales indirectes.
En effet, si B = (e1, e2 . . . , en) est une base orthonormale, considerer B′ = (−e1, e2, . . . , en).
Dans un espace euclidien oriente, un repere orthonormalR = (Ω, (e)) est dit direct ou indirectsuivant que la base orthonormale (e) est directe ou indirecte.
• Soit E un espace euclidien oriente de dimension n ≥ 2. Soit H un hyperplan de E.
Soit (e)H = e1, . . . , en−1 une base orthonormale de H. Alors il existe un unique vecteurunitaire en de D = H⊥ tel que la base orthonormale e1, . . . , en−1, en soit directe.
• Soit F un sous-espace vectoriel d’un espace vectoriel E de dimension finie.
On peut tres bien orienter F sans orienter E. Inversement, une orientation de E n’induit pasautomatiquement une orientation des sous-espaces stricts de E.
En effet, supposons E oriente avec dimE = 3 et soit P un plan de E.
Si w /∈ P , toute base (u, v) de P se complete en les bases B = (u, v, w) et B′ = (u, v,−w),qui sont d’orientation contraire. On ne voit donc pas ce qui permettrait de decreter que labase (u, v) est directe ou indirecte dans le plan P .
Dit d’une facon plus elementaire, la notion de “sens trigonometrique” sur le plan P n’est pasautomatiquement induite par l’orientation de E, car cette notion depend de la “position del’observateur” par rapport au plan P .
[email protected] www.mathprepa.com 19 mai 2001 Page 14

Geometrie euclidienne
Proposition (Orientation d’un hyperplan par orientation de sa normale)
Soit E un espace euclidien de dimension n ≥ 2.
Soit H un hyperplan de E, et D = H⊥ sa normale.
On oriente D par la donnee d’un vecteur unitaire en (il y a deux possibilites.)
On en deduit une orientation de H de la maniere suivante :
Une base orthonormale (e) = e1, . . . , en−1 de H est dite directe si e1, . . . , en−1, en est unebase orthonormale directe dans E.
Remarques
• Si on inverse l’orientation deD (en choisissant−en plutot que en), l’orientation de l’hyperplanH s’en trouve inversee.
• On peut donc orienter tout hyperplan affine H de E par orientation de la normale a H.
Inversement, si on se donne une orientation d’un hyperplan de l’espace vectoriel oriente E,cela induit une orientation de la normale a cet hyperplan.
On suppose ici dimE = 3.
La droite D est la normale en Ω au plan affine P .
On oriente D par le choix du vecteur unitaire e3.
Il en decoule une orientation positive du plan P .
Le repere orthonormal (Ω, e1, e2) est direct
dans le plan P si et seulement si le repere
orthonormal (Ω, e1, e2, e3) est direct dans E.
15.3.2. Produit mixte dans un espace euclidien oriente
Proposition et definition (Produit mixte)
Soit u1, u2, . . . , un une famille de n vecteurs d’un espace euclidien oriente E de dimension n.
Le determinant detB(u1, u2, . . . , un) est le meme dans toute base orthonormale directe B.
Cette valeur est appelee produit mixte de u1, u2, . . . , un et elle est notee [u1, u2, . . . , un].
Produit mixte et orientation
• Le produit mixte de u1, u2, . . . , un est egalement note Det(u1, u2, . . . , un).
On ne precise pas la base B dans laquelle est calcule ce determinant s’il est clair que cettebase est orthonormale directe.
• Si on inverse l’orientation de E, les produits mixtes sont changes en leur oppose.
• L’application “produit mixte” est une forme n-lineaire alternee sur E.
• Si e1, e2, . . . , en est une base orthonormale directe alors [e1, e2, . . . , en] = 1.
Si e1, e2, . . . , en est une base orthonormale indirecte, alors [e1, e2, . . . , en] = −1.
• Soit u1, u2, . . . , un une base de E. On a evidemment [u1, u2, . . . , un] 6= 0.
Plus precisement : [u1, u2, . . . , un] > 0 ⇔ la base u1, u2, . . . , un est directe.
[email protected] www.mathprepa.com 19 mai 2001 Page 15

Geometrie euclidienne
Produit mixte et produit scalaire
• Soient u, v dans le plan euclidien E. Alors (u | v)2 + [u, v]2 = ‖u‖2 ‖v‖2.
• On a toujours l’inegalite∣∣∣[u1, u2, . . . , un]
∣∣∣ ≤ ‖u1‖ ‖u2‖ · · · ‖un‖.
Si u1, u2, . . . , un sont libres, c’est une egalite ⇔ les uk sont orthogonaux deux a deux.
Produit mixte et applications lineaires
• Soit u1, u2, . . . , un une famille de n vecteurs de l’espace euclidien oriente E.
Soit f un endomorphisme de E.
Alors [f(u1), f(u2), . . . , f(un)] = (det f)[u1, u2, . . . , un].
• En particulier, si det(f) = 1, on a [f(u1), f(u2), . . . , f(un)] = [u1, u2, . . . , un].
On peut donc dire que les morphismes de determinant 1 conservent le produit mixte.
Interpretation geometrique du produit mixte
• Aire d’un parallelogramme
Dans le plan euclidienE2, l’aire d’un parallelogramme ABDC est∣∣∣[−→AB,−→AC]
∣∣∣.L’aire du triangle ABC est 1
2
∣∣∣[−→AB,−→AC]∣∣∣.
• Volume d’un parallelepipede
Dans E3 on se donne un parallelepipede dont les aretes issues de A sont AB,AC,AD.
Son volume est∣∣∣[−→AB,−→AC,−−→AD]
∣∣∣. Celui du tetraedre ABCD est 16
∣∣∣[−→AB,−→AC,−−→AD]∣∣∣.
On a represente ci-dessous le parallelepipede.
Ici la base−→AB,
−→AC,
−−→AD est directe, donc le produit mixte [
−→AB,
−→AC,
−−→AD] est positif.
Le procede de Schmidt transforme−→AB,
−→AC,
−−→AD en une base orthonormale directe e1, e2, e3.
On peut alors ecrire−→AB = be1,
−→AC = c′e1 + ce2,
−−→AD = d′′e1 + d′e2 + de3.
Alors [−→AB,
−→AC,
−−→AD] = Det(e)
(−→AB,
−→AC,
−−→AD
)= bcd : c’est bien le volume du parallelepipede.
En effet, bc est l’aire du parallelogramme de base, et d est la hauteur du parallelepipede.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 16

Geometrie euclidienne
15.3.3. Produit vectoriel dans l’espace oriente de dimension 3
Dans ce paragraphe, E est un espace euclidien oriente de dimension 3.
Proposition et definition (Produit vectoriel)
Soient u, v deux vecteurs d’un espace euclidien oriente E de dimension 3.
Il existe un unique vecteur a de E tel que : ∀w ∈ E, [u, v, w] = (a | w).
Ce vecteur a est appele produit vectoriel de u par v, et il est note u ∧ v.On a donc l’egalite, pour tous vecteurs u, v de E : [u, v, w] = ((u ∧ v) | w).
Remarques et proprietes
• Le produit vectoriel de deux vecteurs u, v est parfois note u× v.
• L’application (u, v) 7→ u ∧ v est bilineaire.
Elle est alternee (antisymetrique) : ∀ (u, v) ∈ E2, u ∧ v = −v ∧ u.Pour tous vecteurs u, v, w, on peut ecrire : [u, v, w] = ((u ∧ v) | w) = (u | (v ∧ w)).
• Pour tous vecteurs u, v de E, le vecteur u ∧ v est orthogonal a u et a v.
On a : u ∧ v =−→0 ⇔ u, v sont lies.
Si u, v sont libres, alors la famille u, v, u ∧ v est une base directe.
• Supposons que les deux vecteurs u, v soient unitaires et orthogonaux.
Alors w = u ∧ v est l’unique vecteur tel que u, v, w soit orthonormale directe.
Si i, j, k est orthonormale directe on a :
i ∧ j = k j ∧ k = i k ∧ i = j
j ∧ i = −k k ∧ j = −i i ∧ k = −j• On suppose que E est muni d’une base orthonormale directe i, j, k.
Soit u = xi+ yj + zk et v = x′i+ y′j + z′k.
Alors le produit vectoriel u ∧ v se calcule en ecrivant :
x
y
z
∧
x′
y′
z′
=
yz′ − zy′
zx′ − xz′
xy′ − yx′
• Soient u, v deux vecteurs de E.
On a l’egalite : (u | v)2 + ‖u ∧ v‖2 = ‖u‖2 ‖v‖2.
En particulier ‖u ∧ v‖ ≤ ‖u‖ ‖v‖ (avec egalite ⇔ (u | v) = 0.)
• L’aire du parallelogramme ABDC est ‖−→AB ∧−→AC‖, celle du triangle ABC est 12‖−→AB ∧−→AC‖
• Distance d’un point a une droite
Soit D la droite affine passant Ω et dirigee par u.
Soit M un point de E. La distance de M a D est d(M,D) =‖−−→ΩM ∧ u ‖
‖u‖.
Proposition Formule du double produit vectoriel
Pour tous vecteurs u, v, w, on a : u ∧ (v ∧ w) = (u | w) v − (u | v)w.
Proposition Probleme de la division vectorielle
Soient a, b dans E (a 6= −→0 ); on cherche les vecteurs u de E tels que a ∧ u = b.
Si (a | b) 6= 0, il n’y a pas de solution, sinon on obtient les u = u0 +λa, avec u0 =1
‖a‖2 b∧a.
[email protected] www.mathprepa.com 19 mai 2001 Page 17

Geometrie euclidienne
Illustrons le probleme de la division vectorielle.
Ici les deux vecteurs a et b sont orthogonaux.
On cherche les vecteurs u tels que a ∧ u = b.
Les solutions u sont forcement orthogonales a b.
u0 est la seule solution qui soit orthogonale a a.
Les autres solutions forment la droite affine Dpassant par u0 et dirigee par a.
15.4. Isometries et matrices orthogonales
15.4.1. Automorphismes orthogonaux
Proposition et definition (Automorphismes orthogonaux)
Soit f un endomorphisme de E euclidien.
Les proprietes suivantes sont equivalentes :
f conserve la norme : ∀x ∈ E, ‖f(x)‖ = ‖x‖. f conserve le produit scalaire : ∀ (x, y) ∈ E2, (f(x) | f(y)) = (x | y). f transforme toute base orthonormale de E en une base orthonormale de E.
f transforme une base orthonormale de E en une base orthonormale de E.
Si f verifie ces proprietes, on dit que f est un automorphisme orthogonal de E.
Remarques
• Un synonyme d’automorphisme orthogonal est isometrie vectorielle.
• Les applications Id et −Id sont des automorphismes orthogonaux.
• Tout automorphisme orthogonal f de E est evidemment un automorphisme.
L’application f−1 est egalement un automorphisme orthogonal.
• Le compose de deux automorphismes orthogonaux est un automorphisme orthogonal.
• Soient f un automorphisme orthogonal et u un vecteur non nul de E.
Supposons qu’il existe un reel λ tel que f(u) = λu. Alors λ ∈ −1, 1.
Definition et proposition (Le groupe orthogonal)
On note O(E) l’ensemble des automorphismes orthogonaux de E.
C’est un groupe pour la loi , appele groupe orthogonal de E.
Definition (Symetries vectorielles orthogonales)
Soit F un sous-espace vectoriel de l’espace euclidien E. La symetrie sF par rapport a Fparallelement a F⊥ est appelee symetrie vectorielle orthogonale par rapport a F .
Si F est un hyperplan, on parle de reflexion par rapport a F .
Si F est une droite, on parle de demi-tour (ou de retournement) d’axe F .
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 18

Geometrie euclidienne
Remarques
• Soit s une symetrie vectorielle de l’espace euclidien E.
Alors s est une symetrie vectorielle orthogonale ⇔ s est un automorphisme orthogonal.
NB : une projection orthogonale p n’est pas un automorphisme orthogonal, sauf si p = Id.
• Si s est la symetrie vectorielle orthogonale par rapport a F , −s est celle par rapport a F⊥.
On suppose ici dimE = 3.
La droite D et le plan P sont orthogonaux.
La droite D est dirigee par le vecteur unitaire k.
On a represente la reflexion s par rapport a P
et la projection orthogonale p sur P .
On a p(u) = u− (k | u) k, et s(u) = u− 2 (k | u) k.L’application −s est la symetrie orthogonale
par rapport a la droite vectorielle D.
• Si s est une symetrie vectorielle orthogonale alors : ∀ (u, v) ∈ E2, (s(u) | v) = (u | s(v)).La matrice de s dans une base orthonormale est symetrique. La reciproque est vraie : si lamatrice d’une symetrie vectorielle s dans une base orthonormale est orthogonale, alors s estune symetrie vectorielle orthogonale.
• Reflexion echangeant deux vecteurs de meme norme
Il existe une unique reflexion vectorielle
qui echange deux vecteurs distincts a, b
tels que ‖a‖ = ‖b‖.C’est la reflexion par rapport a l’hyperplan vectoriel P
orthogonal au vecteur a− b.
Proposition (Restriction d’un automorphisme orthogonal a un sous-espace stable)
Soit f un automorphisme orthogonal de l’espace euclidien E.
Soit F un sous-espace vectoriel de E, stable par f (c-a-d tel que f(F ) ⊂ F .)
Alors F est invariant par f , c’est-a-dire verifie f(F ) = F .
Dans ces conditions F⊥ est egalement invariant par f .
La restriction de f a F (resp. a F⊥) est un automorphisme orthogonal de F (resp. de F⊥.)
15.4.2. Isometries affines
Proposition et definition
Soit f une application affine d’un espace euclidien E.
Les conditions suivantes sont equivalentes :
Pour tous points M,N de E, on a d(f(M), f(N)) = d(M,N)
L’application lineaire associee f est un automorphisme orthogonal.
Si ces conditions sont realisees, on dit que f est une isometrie affine de E.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 19

Geometrie euclidienne
Remarques
• On exprime la propriete d(f(M), f(N)) = d(M,N) en disant que f conserve les distances.
Les automorphismes orthogonaux sont les isometries affines qui conservent l’origine.
Les translations sont des isometries affines.
Toutes les symetries par rapport a un point sont des isometries affines.
• Plus generalement, soit F un sous-espace affine d’un espace euclidien E, de direction F .
La symetrie affine par rapport a F , parallelement a F⊥, est une isometrie affine.
On dit que s est une symetrie affine orthogonale.
Si F est un hyperplan, on parle de reflexion par rapport a F .
Si F est une droite affine, on parle de demi-tour (ou de retournement) d’axe F .
• Reciproquement, soit s la symetrie par rapport a un sous-espace affine F de direction F ,parallelement a un sous-espace vectoriel G (avec bien sur E = F ⊕G.)
Si s est une isometrie affine, alors s est une symetrie affine orthogonale (c-a-d G = F⊥.)
• Reflexion echangeant deux points distincts
Soient A,B deux points distincts de E.
Il existe une unique reflexion qui echange A et B.
C’est la symetrie affine orthogonale s par rapport a
l’hyperplan mediateur H du segment [A,B].
• Soient s1 et s2 les reflexions par rapport a deux hyperplans paralleles H1 et H2.
Alors s2 s1 est une translation de vecteur orthogonal a la direction commune de H1 et H2.
A titre d’exemple, on a suppose ici dimE = 3.
On a represente deux plans paralleles F1 et F2.
Soient s1, s2 les reflexions par rapport a F1,F2.
On voit les images de M,N par s1 puis par f = s2 s1.
Les vecteurs−−−−−−−→f(M)f(N) et
−−→MN sont egaux.
f = s2 s1 est la translation de vecteur 2u, ou u est
le vecteur orthogonal a F1,F2 tel que tu(F1) = F2.
• On montre que si une application f : E → E conserve les distances, alors c’est une applicationaffine (donc c’est une isometrie affine.)
Proposition (Groupe des isometries affines)
On note Isom(E) l’ensemble des isometries affines de E.
Pour la loi de composition, c’est un sous-groupe du groupe affine de E.
[email protected] www.mathprepa.com 19 mai 2001 Page 20

Geometrie euclidienne
15.4.3. Matrices orthogonales
Remarque
Soit M une matrice de Mn(IR), de vecteurs-colonnes C1, . . . , Cn.
On considere les Cj comme des elements de IRn muni de son produit scalaire canonique.
Alors le terme general de A = TMM est aij = (Ci | Cj).
Definition (Matrices orthogonales)
Soit M une matrice de Mn(IR).
Les conditions suivantes sont equivalentes :
La matrice M verifie TMM = In.
La matrice M est inversible et M −1 = TM .
Les vecteurs-colonnes de M forment une base orthonormale de IRn.
Si ces conditions sont realisees, on dit que M est une matrice orthogonale.
Proposition et definition (Le groupe orthogonal)
On note O(n) l’ensemble des matrices orthogonales d’ordre n.
C’est un groupe pour le produit des matrices (donc un sous-groupe de GL(n, IR).)
On l’appelle le groupe orthogonal d’indice n.
Remarques et exemples
• Si M est une matrice orthogonale, il en est de meme de TM (car TM = M−1.)
• Une matrice M de Mn(IR) est donc orthogonale si et seulement si ses vecteurs-lignes formentune base orthonormale de IRn.
• Les matrices R(θ) =
(cos θ − sin θ
sin θ cos θ
)et S(θ) =
(cos θ sin θ
sin θ − cos θ
)sont orthogonales.
On verra plus loin que ce sont la toutes les matrices orthogonales d’ordre 2.
• La matrice M =1
3
2 2 11 −2 22 −1 −2
est orthogonale.
Pour tous reels θ, ϕ les matrices M =
cos θ cos ϕ − sin θ cos θ sinϕ
sin θ cos ϕ cos θ sin θ sinϕ
sinϕ 0 − cos ϕ
sont orthogonales.
Proposition
Soit f un endomorphisme de E euclidien.
Soit M la matrice de f dans une base orthonormale.
Les conditions suivantes sont equivalentes :
f est un automorphisme orthogonal de E (donc un element du groupe O(E).)
M est une matrice orthogonale (donc un element du groupe O(n).)
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 21

Geometrie euclidienne
Remarques et proprietes
• On peut interpreter la proposition precedente en disant que les matrices orthogonales sontles matrices des automorphismes orthogonaux dans les bases orthonormales.
• Une matrice M de Mn(IR) est orthogonale ⇔ l’endomorphisme f de IRn (muni de sonproduit scalaire canonique) de matrice M dans la base canonique appartient a O(IRn).
• Les groupes O(E) et O(n) sont isomorphes par le choix d’une base orthonormee.
• Soit (ek)1≤ k≤n une base orthonormale de E. Soient εl, ε2, . . . , εn n vecteurs de E.
(ε) est une base orthonormale de E ⇔ la matrice de (ε) dans (e) est orthogonale.
Ainsi les matrices orthogonales sont les matrices de passage entre bases orthonormales.
• Si M ∈ O(n) alors detM = ±1. La reciproque est fausse, exemple : M =
(1 10 1
).
De la meme maniere, si f est un automorphisme orthogonal de E, alors det f = ±1.
15.4.4. Les groupes SO(E) et SO(n)
Definition (Matrices orthogonales positives ou negatives)
On note SO(n) = O+(n) = M ∈ O(n), detM = 1 et O−(n) = M ∈ O(n), detM = −1.Les matrices de SO(n) sont dites orthogonales positives.
Les matrices de O−(n) sont dites orthogonales negatives.
Definition (Automorphismes orthogonaux positifs ou negatifs)
Soit E un espace euclidien. On note :
SO(E) = O+(E) = f ∈ O(E), det f = 1 (automorphismes orthogonaux positifs).
Les elements de SO(E) sont encore appeles rotations vectorielles de E.
O−(E) = f ∈ O(E), det f = −1 (automorphismes orthogonaux negatifs)
Proposition et definition (Les groupes SO(E) et SO(n))
L’ensemble SO(E) est un sous-groupe de O(E), appele groupe special orthogonal de E.
L’ensemble SO(n) est un sous-groupe de O(n), appele groupe special orthogonal d’indice n.
Remarques
• Id est dans SO(E). Mais l’application −Id est dans SO(E) ⇔ dimE est un entier pair.
• O−(n) et O−(E) ne sont pas des groupes, car ils ne sont pas stables pour le produit.
En revanche, ces ensembles sont stables par passage a l’inverse.
• Si on echange deux colonnes (ou deux lignes) d’une matrice orthogonale positive, on obtientune matrice orthogonale negative (et reciproquement.)
C’est la meme chose si on remplace une colonne (ou une ligne) par son opposee.
Cas des reflexions et des demi-tours
• Une reflexion s est toujours un automorphisme orthogonal negatif, car det s = −1.
• Un demi-tour f de E est une rotation si dimE est impair (car det f = (−1)n−1.)
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 22

Geometrie euclidienne
Comatrice d’une matrice orthogonale
• Si M appartient a O(n) alors Com(M) = εM , avec ε = detM = ±1.
En comparant un coefficient non nul de M avec son cofacteur, on peut determiner ε.
• Exemple : si M =1
3
2 2 11 −2 22 −1 −2
le cofacteur de m11 = 23 est > 0. Donc M ∈ SO(3).
Proposition (Une caracterisation des rotations vectorielles dans un espace oriente)
Soit f ∈ O(E), avec E oriente. Les proprietes suivantes sont equivalentes :
f est une rotation vectorielle, c’est-a-dire un element de SO(E).
f transforme toute base orthonormale directe de E en une base orthonormale directe.
f transforme une base orthonormale directe de E en une base orthonormale directe.
Remarques
• Plus generalement, une application f d’un espace euclidien E est une rotation vectorielle ⇔elle transforme une base orthonormale en une base orthonormale de meme orientation.
• Les rotations vectorielles sont les automorphismes orthogonaux qui conservent l’orientation,alors que les automorphismes orthogonaux negatifs sont ceux qui l’inversent.
• Soit u1, u2, . . . , un une famille de n vecteurs de E oriente.
Si f est une rotation vectorielle : [f(u1), f(u2), . . . , f(un)] = [u1, u2, . . . , un].
On peut donc dire que les rotations conservent le produit mixte.
Si f est un automorphisme orthogonal negatif, [f(u1), f(u2), . . . , f(un)] = −[u1, u2, . . . , un].
15.4.5. Deplacements et antideplacements
Definition (Deplacements)
Soit E un espace euclidien. Soit f une isometrie affine de E.
On dit que f est un deplacement si f est un element de SO(E).
Remarques
• Si E est oriente, on peut dire que les deplacements sont les isometries affines qui conserventl’orientation, c’est-a-dire qui transforment un repere orthonormal direct (Ω, e1, . . . , en) en un
autre repere orthonormal direct (f(Ω), f(e1), . . . , f(en)).
• Les translations sont des deplacements. Une reflexion est un antideplacement.
Une symetrie de centre Ω est un deplacement si dimE est pair, un antideplacement sinon.
Un demi-tour est un deplacement si dimE est impair, un antideplacement sinon.
• L’ensemble Isom+(E) des deplacements est un sous-groupe de Isom(E) (isometries de E.)
L’inverse d’un antideplacement est un antideplacement.
Le compose de deux antideplacements est un deplacement.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 23

Geometrie euclidienne
15.5. Isometries en dimension 1 ou 2
15.5.1. Isometries en dimension 1
La description des isometries d’une droite vectorielle E est tres simple :
On a O(1) = (1), (−1), et SO(1) = (1). On O(E) = Id,−Id et SO(E) = Id. Les seules isometries de E sont les translations (ce sont des deplacements) et les symetries
par rapport a des points (ce sont des antideplacements.)
La symetrie par rapport au point A est donnee par : ∀M ∈ E, s(M) = 2A−M .
15.5.2. Matrices orthogonales d’ordre 2
Proposition (Le groupe SO(2))
Le groupe SO(2) est egal a l’ensemble des matrices R(θ) =
(cos θ − sin θsin θ cos θ
), avec θ ∈ IR.
On a R(0) = I2, et R(θ)−1 = R(−θ) pour tout reel θ.
Pour tous reels θ et θ′, on R(θ)R(θ′) = R(θ′)R(θ) = R(θ + θ′).
Proposition (Les matrices de O−(2))
Les elements de O−(2) sont les matrices qui s’ecrivent S(θ) =
(cos θ sin θsin θ − cos θ
), avec θ ∈ IR.
On verifie les proprietes suivantes, pour tous θ et θ′ :
S(θ)−1 = S(θ) (matrices involutives)
S(θ)S(θ′) = R(θ − θ′)
Remarques
• L’application θ 7→ R(θ) est un morphisme surjectif du groupe (IR,+) sur le groupe SO(2).
Le noyau de ce morphisme est l’ensemble 2πZZ. On a R(θ) = R(θ′) ⇔ θ ≡ θ′ [2π].
• Le groupe SO(2) est commutatif. On montre que SO(n) n’est pas commutatif si n ≥ 3.
• Toutes les matrices orthogonales negatives d’ordre 2 sont des matrices de symetrie.
Cela signifie que tous les automorphismes orthogonaux negatifs d’un plan euclidien sont dessymetries vectorielles orthogonales (a suivre.)
15.5.3. Angles dans le plan euclidien oriente
Dans la suite de cette partie, on suppose que E2 est un plan euclidien oriente.
Definition et proposition (Angle d’une rotation dans le plan euclidien oriente)
Soit r une rotation de E2. Il existe un unique reel θ (modulo 2π) tel que :
La matrice de la rotation r dans toute base orthonormale directe est R(θ) =
(cos θ − sin θsin θ cos θ
).
On dit alors que r est la rotation d’angle θ, et on note r = r(θ).
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 24

Geometrie euclidienne
Remarques et proprietes
• On dit aussi que θ est une mesure de l’angle de la rotation r.
• Les proprietes des matrices R(θ) donnent immediatement :
Id est la rotation d’angle 0 [2π], et −Id est la rotation d’angle π [2π].
La rotation inverse de r(θ) est r(−θ). Pour tous reels θ, θ′, on a r(θ) r(θ′) = r(θ′) r(θ) = r(θ + θ′).
Ainsi le groupe SO(E2) des rotations de E2 est un groupe commutatif.
• La matrice de la rotation r(θ) dans toute base orthonormale indirecte est R(−θ).Cela signifie que si on inverse l’orientation du plan E2, alors la mesure de toute rotation estchangee en son oppose (modulo 2π).
• Les seules rotations involutives sont r(0) = Id et r(π) = −Id.
Si r = r(θ), avec θ 6= 0 [2π], alors le seul vecteur invariant de r est−→0 .
• Soit r la rotation d’angle π2 [2π].
Alors pour toute base orthonormale directe u, v, on a r(u) = v et r(v) = −u.
Proposition et definition (Angle de deux vecteurs unitaires)
Soient u, v deux vecteurs unitaires de E2.
Il existe une et une seule rotation r telle que r(u) = v.
Si r = r(θ), alors on note (u, v) = θ [2π].
On dit que θ est une mesure (modulo 2π) de l’angle oriente (u, v).
On voit ci-dessous comment illustrer la situation. La base e1, e2, orthonormale directe, n’est laque pour visualiser l’orientation positive choisie dans le plan.
Tous les vecteurs consideres ici sont unitaires.
Il existe bien une unique rotation vectorielle r = r(θ) telle que v = r(u).
On commet souvent l’erreur de penser qu’il y a deux rotations transformant u en v (l’unequi “tournerait” dans un sens, la deuxieme tournant dans l’autre) ou meme une infinite (toutdependrait du “nombre de tours effectues”.)
La rotation r n’est qu’une application : seul compte ou se trouve l’image v d’un vecteur u, etpas la maniere dont on “passe” de u a v.
L’erreur evoquee vient de la confusion entre la rotation r et les differentes mesures de son angle.
On se rend facilement compte de l’unicite de
la rotation vectorielle r transformant u en v
en se donnant un autre vecteur unitaire u′.
La condition v = r(u) determine en effet
le vecteur v′ = r(u′) de maniere unique.
[email protected] www.mathprepa.com 19 mai 2001 Page 25

Geometrie euclidienne
Definition (Angle de deux vecteurs non nuls)
Soient u, v deux vecteurs unitaires de E2.
On appelle mesure de l’angle oriente (u, v) toute mesure θ de l’angle(u‖u‖ ,
v‖v‖
).
On note alors (u, v) = θ [2π].
Remarques et proprietes
On designe par u, v, w des vecteurs non nuls quelconques du plan euclidien oriente E2,
• Une mesure θ de l’angle (u, v) est donnee par : cos θ =(u | v)‖u‖ ‖v‖
, et sin θ =Det(u, v)
‖u‖ ‖v‖.
Rappel : Det(u, v) est le determinant de u, v dans toute base orthonormale directe.
Si on inverse l’orientation de E2, toutes les mesures d’angle sont changees en leur oppose.
• On a (u, u) = 0 [2π], (u,−u) = π [2π].
Les vecteurs u, v sont lies si et seulement si (u, v) = 0 [π].
• On a la relation de Chasles : (u, v) = (u,w) + (w, v) [2π].
Supposons (u, v) = θ [2π].
Alors on a les egalites
(v, u) = −θ [2π], (−u, v) = θ + π [2π], (−u,−v) = θ [2π]
• Soit f un automorphisme orthogonal de E2.
Si f est une rotation (un element de SO(E2)), alors (f(u), f(v)) = (u, v) [2π].
Ainsi les rotations conservent les mesures des angles orientes.
Si f est un automorphisme orthogonal negatif, alors (f(u), f(v)) = −(u, v) [2π].
Les elements de O−(E2) inversent les mesures d’angle.
• Soit r la rotation d’angle θ [2π]. Pour tout vecteur u unitaire, on a
(u | r(u)) = cos θ
Det(u, r(u)) = sin θ
• Soient A,B,C trois points distincts de E2.
On a l’egalite
(−→AB,
−→AC) +
(−→CA,
−−→CB) +
(−−→BC,
−→BA) = π [2π].
La somme des mesures des angles “interieurs” a un triangle est donc egale a π [2π].
Il y a une demonstration tres visuelle, illustree ci-dessous.
Les points B′, C ′ se deduisent de B et C par la translation de vecteur−→AB.
Posons
(−→AB,
−→AC) = θ [2π],
(−→CA,
−−→CB) = ϕ [2π] et
(−−→BC,
−→BA) = ψ [2π].
On a θ =
(−−→BB′,
−−→BC ′) et ψ =
(−−→B′C ′,
−→BA).
On a ϕ =
(−−→C ′B,
−−→C ′B′) =
(−−→BC ′,
−−→B′C ′).
Ainsi θ + ϕ+ ψ =
(−−→BB′,
−→BA) = π [2π]
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 26

Geometrie euclidienne
Definition (angle de deux demi-droites affines)
Soient D+1 ,D+
2 deux demi-droites affines de E2, de vecteurs directeurs u1, u2.
On appelle mesure de l’angle oriente (D+1 ,D+
2 ) toute mesure de l’angle oriente (u1, u2).
On note donc (D+1 ,D+
2 ) = (u1, u2) [2π].
Definition (angle de deux droites affines)
Soient D1,D2 deux droites affines de E2, de vecteurs directeurs u1, u2.
Si (u1, u2) = θ [2π], alors on note (D1,D2) = θ [π].
On dit que θ est une mesure, modulo π, de l’angle oriente (D1,D2).
Remarques et proprietes
• Si la mesure de l’angle de D1 et D2 (dirigees par u1 et u2) est definie modulo π, c’est parcequ’on n’a pas de moyen objectif de choisir u1 plutot que −u1, et u2 plutot que −u2.
D’autre part, on sait que si (u1, u2) = θ [2π] alors
(−u1,−u2) = θ [2π]
(−u1, u2) = (u1,−u2) = θ + π [2π]
On voit donc que la seule solution
est de conserver la valeur de θ
mais modulo π, si on veut definir
une mesure de (D1,D2) independante
du choix des vecteurs directeurs.
• Si on inverse l’orientation de E2, toutes les mesures d’angles sont changees en leur oppose.
• Soient D1 et D2 deux droites affines du plan euclidien oriente E2.
On a (D1,D2) = 0 [π] ⇔ D1 ‖D2. On a (D1,D2) = π2 [π] ⇔ D1⊥D2.
Si ∆1,∆2 sont respectivement orthogonales a D1,D2, alors (∆1,∆2) = (D1,D2) [π].
• Soit D+1 une demi-droite affine d’origine Ω. Soit θ un reel.
Il existe une unique demi-droite D+2 d’origine Ω et telle que (D+
1 ,D+2 ) = θ [2π].
Soit D1 une droite affine passant par Ω. Soit θ un reel.
Il existe une unique droite D2 passant par Ω et telle que (D1,D2) = θ [π].
[email protected] www.mathprepa.com 19 mai 2001 Page 27

Geometrie euclidienne
• Angle polaire d’une demi-droite, d’une droite
On suppose que E2 est rapporte a un repere orthonormal direct R = (Ω, (i, j)).
Soit D+ une demi-droite de E2. On dit que (IR+i,D+) = θ [2π] est l’angle polaire de D+.
Soit D une droite de E2. On dit que (IRi,D) = θ [π] est l’angle polaire de D.
Supposons que D ne soit pas parallele a IRj, c’est-a-dire que θ soit different de π2 [π].
Une equation de D est y = mx+ y0, avec m = tan θ.
Supposons que les droites D et D′ aient respectivement pour equation
y = mx+ y0
y = m′x+ y′0.
Ces droites sont orthogonales si et seulement si mm′ = −1.
Supposons mm′ 6= −1. Alors (D,D′) = θ [π] est donne par θ = arctanm′ −m
1 +mm′ .
Equation normale d’une droite affine
Soit D une droite affine du plan euclidien oriente.
Soit ∆ la perpendiculaire a D passant par O.
Soit H le point d’intersection de D et de ∆.
Soit θ [π] l’angle polaire de la droite ∆.
Le vecteur u(cos θ, sin θ) dirige la droite ∆.
Il existe h ∈ IR tel que−−→OH = hu(θ).
Alors une equation de D est x cos θ + y sin θ = h.
On dit que c’est l’equation normale de D.
Bissectrices de deux (demi-)droites affines
• Soient D+1 et D+
2 deux demi-droites affines du plan euclidien oriente E2, concourantes en Ω.
Il existe deux demi-droites ∆+ d’origine Ω, opposees, et telles que (D+1 ,D+
2 ) = 2 (D+1 ,∆
+) [2π].
La reunion ∆ de ces deux demi-droites est une droite appelee bissectrice du couple (D+1 ,D+
2 ).
NB : cette droite ne depend pas de l’ordre dans lequel sont donnees D+1 et D+
2 .
La droite ∆′ orthogonale en Ω a ∆ est la bissectrice exterieure du couple (D+1 ,D+
2 ).
• Soient D1 et D2 deux droites affines du plan euclidien oriente E2, concourantes en Ω.
Il existe deux droites ∆ passant par Ω et telles que (D1,D2) = 2 (D1,∆) [π].
Ces deux droites sont orthogonales en Ω. On les appelle les bissectrices du couple (D1,D2).
Ce sont les axes des reflexions du plan qui echangent D1 et D2.
La reunion des bissectrices ∆1 et ∆2
des droites affines D1 et D2
est egale a l’ensemble des points qui sont
equidistants de D1 et D2.
[email protected] www.mathprepa.com 19 mai 2001 Page 28

Geometrie euclidienne
15.5.4. Isometries du plan euclidien oriente
Dans ce paragraphe, E2 est un plan euclidien oriente.
Proposition (automorphismes orthogonaux negatifs de E2)
On sait que toute reflexion par rapport a une droite vectorielle est dans O−(E2).
Reciproquement, soit s un automorphisme orthogonal negatif de E2.
On suppose que E2 est muni d’une base orthonormale directe (i, j).
Alors il existe θ dans IR telle que la matrice de s dans (i, j) soit S(θ) =
(cos θ sin θsin θ − cos θ
).
s est alors la reflexion par rapport a la droite d’angle polaire θ2 [π].
Remarques
Le resultat precedent complete la classification des automorphismes orthogonaux de E2 :
Ceux qui sont positifs sont les rotations vectorielles.
Ceux qui sont negatifs sont les reflexions par rapport a des droites vectorielles.
Que E2 soit oriente ou non n’intervient pas dans cette classification, mais dans le fait qu’onpeut mesurer l’angle d’une rotation et l’angle polaire de l’axe d’une reflexion.
Proposition (Les reflexions engendrent le groupe O(E2))
La composee de deux reflexions vectorielles de E2 est une rotation vectorielle.
Reciproquement, toute rotation vectorielle r est la composee de deux reflexions vectorielles.
De plus on peut choisir l’un d’elle arbitrairement, l’autre etant alors fixee.
Remarques
On peut etre plus precis, en supposant que E2 est muni d’une base orthonormale directe.
• Soient s1, s2 les reflexions d’axes les droites vectorielles D1, D2 d’angles polaires θ1, θ2.
Alors s2 s1 est la rotation vectorielle d’angle ϕ = 2(θ2 − θ1) [2π].
• Reciproquement, soit r la rotation vectorielle d’angle θ.
Pour tout reel ϕ, notons s(ϕ) la reflexion d’axe la droite vectorielle d’angle polaire ϕ.
Pour tout reel ϕ1, on a r = s(ϕ2) s(ϕ1), avec ϕ2 = ϕ1 + θ2 [π].
Pour tout reel ϕ2, on a r = s(ϕ2) s(ϕ1), avec ϕ1 = ϕ2 − θ2 [π].
[email protected] www.mathprepa.com 19 mai 2001 Page 29

Geometrie euclidienne
Definition (Rotations affines)
Soit Ω un point du plan euclidien oriente E2, et soit θ un reel.
On appelle rotation (affine) de centre Ω et d’angle θ [2π] l’application affine r qui laisse Ωinvariant et dont l’application lineaire associee r est la rotation (vectorielle) d’angle θ [2π].
Cette application r est donc definie par : ∀M ∈ E2, r(M) = Ω + r(−−→ΩM).
On note souvent r(Ω, θ) la rotation de centre Ω et d’angle θ [2π].
Voici une illustration de la rotation r
de centre Ω et d’angle θ [2π].
Les rotations vectorielles sont
les rotations affines de centre 0.
On peut donc parler simplement de “rotation”,
le centre n’etant mentionne que
s’il est distinct de l’origine 0.
Remarques
• Si θ = 0 [2π], alors r(Ω, θ) = Id (dans ce cas, le centre est quelconque.)
Si θ 6= 0 [2π], le point Ω est le seul point invariant de la rotation r(Ω, θ).
Si θ = π [2π], alors r(Ω, θ) est la symetrie par rapport au point Ω.
• Il n’est pas necessaire que E2 soit oriente pour qu’on definisse les rotations affines. Cela n’estutile que si on veut leur associer une mesure d’angle. D’ailleurs, si on inverse l’orientationdu plan, les mesures des angles de rotation affine sont changees en leur oppose.
Proposition (Classification des deplacements du plan)
Les deplacements du plan euclidien sont les translations et les rotations.
Proposition (Classification des antideplacements du plan)
Les antideplacements du plan euclidien sont :
Les reflexions par rapport a une droite affine.
Ces antideplacements sont involutifs. Leur axe est l’ensemble de leurs points invariants.
Les composees f = s tu = tu s d’une reflexion s par rapport a une droite affine et d’unetranslation de vecteur u non nul parallele a cette droite.
Ces sont des antideplacements sans point invariant.
On illustre f = s tu = tu s.Pour tout point M ,
−−−−−−−→M f f(M) = 2u.
On en deduit le vecteur u.
On connait ainsi la direction de D.
Ensuite Ω = 12f(0) est sur D.
On connait donc tous les elements
permettant de decrire f .
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 30

Geometrie euclidienne
Proposition (Composition de reflexions affines)
Soient s et s′ les reflexions de E2 par rapport aux droites affines D et D′.
Si D ‖D′, alors s′ s est une translation de vecteur orthogonal a la direction de D,D′.
Sinon, s′ s est une rotation r de centre Ω = D ∩D.
Plus precisement, si E2 est oriente, alors l’angle de r est 2 (D,D′) [2π].
Sur le schema de gauche, on a s′ s = tv, avec v = 2u.
Sur celui de droite, on a l’egalite s′ s = r(ϕ), avec ϕ = 2 (D,D′) [2π].
Reciproques et conclusion
• Toute translation peut s’ecrire comme la composee s′ s de deux reflexions par rapport adeux droites paralleles D et D′. On peut choisir arbitrairement l’une de ces deux droites,l’autre etant alors definie de maniere unique.
• Toute rotation de centre Ω peut s’ecrire comme la composee s′ s de deux reflexions parrapport a des droites D et D′ concourantes en Ω. On peut choisir arbitrairement l’uned’elles, l’autre etant alors definie de maniere unique.
Par exemple, la symetrie par rapport a un point Ω est la composee des reflexions par rapporta deux droites quelconques orthogonales en Ω.
• Les reflexions engendrent le groupe des isometries de E2. Toute isometrie est en effet unereflexion ou la composee de deux reflexions (si c’est une rotation ou une translation) ou detrois reflexions (si c’est un antideplacement sans point invariant, donc la composee d’unereflexion d’axe D et d’une translation de vecteur non nul parallele a D.)
• On pourra reflechir a l’exercice suivant :
Soient A,B,C trois points non alignes dans le plan.
On note sA, sB, sC les reflexions respectives par rapport aux droites (BC), (CA), (AB).
On demande d’identifier l’application f = sC sB sA.
Bien sur l’application f est un antideplacement (comme composee de trois antideplacements.)
C’est donc la composee d’une reflexion s par rapport a une droite D et d’une translation devecteur u (eventuellement nul) parallele a D.
Le probleme est donc d’identifier la droite D et le vecteur u . . .
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 31

Geometrie euclidienne
15.6. Similitudes du plan
15.6.1. Nombres complexes et geometrie du plan
Structure de plan affine
• L’ensemble lC est un plan vectoriel sur IR.
Les translations de lC sont les applications tω : z 7→ Z = z + ω.
L’homothetie de centre z0 et de rapport λ ∈ IR est donnee par z 7→ Z = z0 + λ(z − z0).
• Soit z0 un element de lC et ω un element de lC∗.
Soit D la droite affine passant par z0 et dirigee par ω.
Une representation parametrique de D est : z ∈ D ⇔ ∃λ ∈ IR, z = z0 + λω.
On designera par Ox la droite passant par 0 et dirigee par 1 (son equation est z = z : c’estla droite des nombres reels) et on designera par Oy la droite passant par 0 et dirigee par i(son equation est z = −z : c’est la droite des nombres imaginaires purs).
• Soient a, b deux elements distincts de lC, et soit D la droite qui les contient.
Le point z est dans D ⇔
∣∣∣∣∣∣z a b
z a b
1 1 1
∣∣∣∣∣∣ = 0.
Plus generalement trois points a, b, c de lC sont alignes ⇔ ab+ bc+ ca est un reel.
• Puisque lC est un plan, L( lC) est un IR-espace vectoriel de dimension 4.
Les applications z 7→ z, z 7→ iz, z 7→ z et z 7→ iz en forment une base.
Ainsi les endomorphismes du plan lC sont les applications z 7→ Z = uz+vz, avec (u, v) ∈ lC2.
Les applications affines de lC sont les applications z 7→ Z = uz+ vw+ c, avec (u, v, w) ∈ lC3.
Structure de plan euclidien
• Pour tous
u = x+ iy
v = x′ + iy′de lC, on pose (u | v) = xx′ + yy′ = Re (u v) = 1
2(uv + vu).
On definit ainsi un produit scalaire sur lC pour lequel la base 1, i est orthonormale.
La norme associee a ce produit scalaire est l’application “module” : z 7→ |z|.La distance euclidienne associee est donc definie par : d(u, v) = |v − u|.Deux elements u, v de lC sont orthogonaux ⇔ uv est imaginaire ⇔ uv + vu = 0.
Les bases orthonormees sont les bases (u, v), avec |u| = 1 et v = ±iu.
• Voici la representation z 7→ Z = f(z) de quelques applications simples :
La projection orthogonale sur la droite Ox est donnee par z 7→ Z = Re (z) = 12(z + z).
La projection orthogonale sur Oy est donnee par z 7→ Z = Im (z) = 12i(z − z).
La symetrie vectorielle orthogonale par rapport a Ox est donnee par z 7→ Z = z.
La symetrie vectorielle orthogonale par rapport a Oy est donnee par z 7→ Z = −z.
[email protected] www.mathprepa.com 19 mai 2001 Page 32

Geometrie euclidienne
Structure de plan euclidien oriente
• On oriente lC en decidant que la base orthonormale 1, i est directe.
Les bases orthonormees directes sont alors les bases (u, v), avec |u| = 1 et v = iu.
• Soient u = x+ iy et v = x′ + iy′ deux elements de lC.
Leur produit mixte est : [u, v] = xy′ − yx′ = Im (u v). Rappelons que (u | v) = Re (u v).
• On verifie que l’aire du triangle de sommets a, b, c est 12
∣∣Im (ab+ bc+ ca)∣∣.
Ce resultat concorde avec le fait que a, b, c sont alignes ⇔ ab+ bc+ ca est reel.
Rotations affines et deplacements dans lC
• La rotation vectorielle d’angle θ [2π] est definie par : z 7→ Z = eiθ z.
La rotation affine de centre ω et d’angle θ [2π] est definie par : z 7→ Z = ω + eiθ(z − ω).
Soient u, v deux elements non nuls dans lC. On a (u, v) = arg v − arg u [2π].
• Reciproquement, soit f l’application affine definie par z 7→ f(z) = az + b, ou |a| = 1.
Si a = 1, l’application f est la translation de vecteur b.
Si a 6= 1, il y a un point fixe unique ω defini par ω = aω + b donc ω =b
1− a.
On a alors Z = az + b ⇔ Z − ω = a(z − ω).
En posant a = eiθ, avec θ 6= 0 [2π], on trouve la rotation de centre ω d’angle θ [2π].
• Conclusion :
Les deplacements de lC sont les applications f : z 7→ Z = az + b, avec |a| = 1.
On obtient les translations si a = 1 et les rotations distinctes de Id si a 6= 1.
• Exemple :
Considerons l’application z 7→ f(z) = iz + 2.
C’est un deplacement de lC.
On a ω = iω + 2 ⇔ ω = 1 + i.
L’application f est donc la rotation
de centre ω et d’angle argω = π2 [2π].
Reflexions et projections orthogonales
Soit D la droite vectorielle d’angle polaire θ [π].
La reflexion par rapport a D est donnee par z 7→ Z = e2iθ z.
La projection orthogonale sur D est donnee par z 7→ Z = 12(z + e2iθ z).
Soit D la droite affine passant par a, d’angle polaire θ [π].
La reflexion s par rapport a D s’ecrit z 7→ Z = a+ e2iθ z − a = e2iθ z + a− e2iθ a.
La projection orthogonale r sur D est : z 7→ Z = 12(z + e2iθ z) + 1
2(a− e2iθ a).
Pour trouver s, r, il suffit de completer les formules obtenues dans le cas vectoriel : onajoute une constante ω determinee par le fait que le point a est invariant.
[email protected] www.mathprepa.com 19 mai 2001 Page 33

Geometrie euclidienne
Classification des antideplacements de lC
• Reciproquement, soit f l’application affine definie par z 7→ f(z) = az + b, avec |a| = 1.
L’application f est la composee de la reflexion z 7→ z et du deplacement z 7→ az + b.
Ainsi l’application f est un antideplacement.
Posons a = eiθ.
L’application f : z 7→ eiθ z est la reflexion par rapport a la droite d’angle polaire θ2 .
L’application f f est definie par f f(z) = a(az + b) + b = z + ab+ b.
Donc f f est une reflexion si et seulement si ab+ b = 0.
f est la composee de la reflexion par rapport a une droite D d’angle polaire θ2 et d’une
translation de vecteur u parallele a D.
Le point b2 est un point de D ce qui acheve de determiner cette droite.
On trouve le vecteur de translation en ecrivant u = 12(f f(z)− z) = 1
2(ab+ b).
• Conclusion :
Les antideplacements de lC sont les applications f : z 7→ Z = az + b, avec |a| = 1.
On obtient les reflexions quand ab+ b = 0 (c’est-a-dire quand f f(0) = 0.)
• Exemple :
Considerons l’application z 7→ f(z) = iz + 2.
C’est un antideplacement de lC.
On a f f(0) = f(2) = 2(1 + i).
f est donc la composee de la translation t
de vecteur 1 + i et de la reflexion s par rapport
a la droite D passant par 1 et dirigee par 1 + i.
15.6.2. Similitudes du plan
Definition (Similitudes vectorielles)
Soit f un endomorphisme de l’espace euclidien E.
Soit k un reel strictement positif.
On dit que f est une similitude vectorielle de rapport k si ∀u ∈ E, ‖f(u)‖ = k ‖u‖.
Definition (Similitudes)
Soit f : E → E une application affine de E euclidien, d’application lineaire associee f .
Soit k un reel strictement positif.
On dit que f est une similitude de rapport k si f est une similitude vectorielle de rapport k.
Cela equivaut a : ∀ (M,N) ∈ E2, d(f(M), f(N)) = k d(M,N).
Autrement dit, f multiplie les distances par le facteur constant k.
[email protected] www.mathprepa.com 19 mai 2001 Page 34

Geometrie euclidienne
Remarques
• Une similitude vectorielle est un automorphisme de E, car f(u) =−→0 ⇒ u =
−→0 .
• Les isometries sont les similitudes de rapport 1.
Une homothetie de rapport k est une similitude de rapport |k|.
• L’inverse d’une similitude de rapport k est une similitude de rapport 1k .
La composee de deux similitudes de rapport k, k′ est une similitude de rapport k, k′.
Les similitudes forment donc un sous-groupe du groupe affine de E.
Proposition
Soit f : E → E une similitude de rapport k > 0.
Alors f est la composee d’une homothetie h de rapport k et d’une isometrie g.
Si g est un deplacement, on dit que f est une similitude directe.
Si g est un antideplacement, on dit que f est une similitude indirecte.
Remarques
• La decomposition de f evoquee ci-dessus n’est pas unique.
Plus precisement, si h est une homothetie quelconque de rapport k > 0, alors il existe uneisometrie unique g et une isometrie unique g′ telles que f = h g = g′ h.Avec ces notations, et si dimE = n, on a det(f) = kn det g = kn det g′, ce qui prouve que get g′ sont des isometries de meme “genre”.
• On aurait pu adopter la definition equivalente suivante :
Une similitude f est dite directe (resp. indirecte) si det(f) > 0 (resp. det(f) < 0.)
Si E est oriente, les similitudes directes sont celles qui conservent l’orientation, et les simili-tudes indirectes sont celles qui inversent l’orientation.
Dans la suite de ce paragraphe, on ne considere que des similitudes d’un plan euclidien.
Proposition (Similitudes et mesures d’angles dans le plan)
Soit f une similitude vectorielle d’un plan euclidien oriente E.
Soient u, v deux vecteurs non nuls de E.
Si f est directe, alors (f(u), f(v)) = (u, v) [2π]
Si f est indirecte, alors (f(u), f(v)) = −(u, v) [2π]
Si f est une similitude (affine) et si A,B,C sont trois poins distincts, alors :
Si f est directe, alors
(−−−−−−→f(A)f(B),
−−−−−−→f(A)f(C)) =
(−→AB,
−→AC) [2π]
Si f est indirecte, alors
(−−−−−−→f(A)f(B),
−−−−−−→f(A)f(C)) = −
(−→AB,
−→AC) [2π]
Ainsi les similitudes directes conservent les mesures d’angles, et les similitudes indirectes leschangent en leur oppose.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 35

Geometrie euclidienne
Proposition (Repesentation analytique dans un repere orthonorme du plan)
Soit E soit un plan euclidien, muni d’un repere orthonormal.
Les similitudes directes sont sont representees par les systemes
x′ = ax− by + x0
y′ = bx+ ay + y0
Les systemes
x′ = ax+ by + x0
y′ = bx− ay + y0
caracterisent les similitudes indirectes.
Dans ces deux cas on suppose (a, b) 6= (0, 0) (sinon l’application est constante.)
Le rapport de la similitude est alors k =√a2 + b2.
Proposition (Similitudes du plan complexe)
L’ensemble lC est muni de sa structure canonique de plan vectoriel euclidien oriente.
Soit f une application de lC dans lui-meme.
f est une similitude directe ⇔ ∃ (a, b) ∈ lC∗ × lC, ∀ z ∈ lC, f(z) = az + b.
f est une similitude indirecte ⇔ ∃ (a, b) ∈ lC∗ × lC, ∀ z ∈ lC, f(z) = az + b.
Dans les deux cas precedents, le rapport de la similitude est k = |a|.
Proposition (Classification des similitudes directes du plan)
Soit E un plan euclidien oriente.
Soit f une similitude directe de E, de rapport k > 0.
Si k = 1, alors f est un deplacement (une translation t ou une rotation r 6= Id).
Si k 6= 1, l’application f possede un point fixe unique Ω.
Alors f = h r = r h, ou
h est l’homothetie de centre Ω et de rapport k
r est une rotation de centre Ω, d’angle θ [2π]
On dit alors que f est la similitude directe de rapport k, de centre Ω, et d’angle θ [2π].
Exemple :
Considerons l’application z 7→ f(z) = 2iz + 2 + i.
C’est une similitude directe de lC.
On a ω = f(ω) ⇔ ω = i.
L’application f est la composee de la rotation r
de centre i et d’angle arg(2i) = π2 [2π] et de
l’homothetie h de centre i et de rapport |2i| = 2.
Proposition (Similitude directe definie par l’image d’un segment)
Dans le plan euclidien E, soient [A,B] et [A′, B′] deux segments non reduits a un point.
Il existe une unique similitude directe f telle que f(A) = A′ et f(B) = B′.
L’image du segment [A,B] est alors egale au segment [A′, B′].
L’angle de la similitude f est
(−−→AA′,
−−→BB′) [2π] et son rapport est egal a
d(A′, B′)
d(A,B).
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 36

Geometrie euclidienne
Proposition (Classification des similitudes indirectes du plan)
Soit E un plan euclidien oriente.
Soit f une similitude indirecte de E, de rapport k > 0.
Si k = 1, alors f est un antideplacement (une reflexion d’axe D, ou la composee d’unetelle reflexion par une translation de vecteur parallele a D.)
Si k 6= 1, l’application f possede un point fixe unique Ω.
Alors f = h s = s h, ou
h est l’homothetie de centre Ω et de rapport k
s est la reflexion par rapport a une droite passant par Ω
Exemple :
Considerons z 7→ f(z) = 2iz + 2− i.
On a ω = f(ω) ⇔ ω = −i.f est la composee de la reflexion s par rapport
a la droite D passant par −i et
d’angle polaire 12 arg(2i) = π
4 [2π]
et de l’homothetie h de centre −iet de rapport |2i| = 2.
15.7. Angles et isometries en dimension 3On suppose ici que E est un espace euclidien oriente de dimension 3.
15.7.1. Angles en dimension 3
Angle de deux vecteurs
• Soient u, v deux vecteurs independants de E3 : ils engendrent un plan vectoriel P .
Si P est oriente, on peut donner un sens a la mesure θ (modulo 2π) de l’angle (u, v).
Si on inverse l’orientation de P , la mesure de cet angle est changee en son oppose.
Seule la valeur cos θ est independante de cette orientation arbitraire du plan P .
Cette valeur definit un angle θ unique dans ]0, π[. On posera donc (u, v) = θ ∈]0, π[.
On etend cette definition au cas ou u et v sont lies (avec toujours u 6= −→0 , v 6= 0) :
Si v = λu, on pose (u, v) = 0 si λ > 0 et (u, v) = π si λ < 0.
• Dans tous les cas, l’angle θ = (u, v) est defini par θ = arccos(u | v)‖u‖ ‖v‖
.
• On constate qu’avec cette definition on a (u, v) = (v, u).
A cause de cette symetrie, on pourra parler de l’ecart angulaire de u et v.
On voit aussi que cette definition est independante de l’orientation choisie dans E3.
• On n’a plus de propriete du genre “Chasles” : (u, v) = (u,w) + (w, v) car il n’y a aucuneraison pour que u, v, w appartiennent a un meme plan vectoriel.
• On definit l’angle de deux-demi droites comme etant celui de leurs vecteurs directeurs.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 37

Geometrie euclidienne
Angles de deux droites ou de deux plans
• Soient D et D′ deux droites affines, de vecteurs directeurs respectifs u et v.
On constate que (u, v) = (−u,−v) = π − (−u, v) = π − (u,−v).
Pour definir (D,D′) independamment du choix de u, v on conserve la mesure dans[0, π
2
].
On pose donc (D,D′) = θ, avec θ = arccos
∣∣∣∣ (u | v)‖u‖ ‖v‖
∣∣∣∣ ∈ [0, π
2
].
• Soient P et P ′ deux plans affines, de normales D et D′. On pose (P ,P ′) = (D,D′).
Supposons que leurs equations soient
ax+ by + cz = d
a′x+ b′y + c′z = d′dans un repere orthonormal.
Alors (P ,P ′) = θ, avec θ = arccos
∣∣∣∣ (u | v)‖u‖ ‖v‖
∣∣∣∣, ou
u = (a, b, c)
v = (a′, b′, c′)
• On a bien sur (P ,P ′) = 0 si P || P ′, et (P ,P ′) = π2 si P ,P ′ sont perpendiculaires.
Angle d’une droite et d’un plan
• Soient D et P une droite et un plan affines. Soit ∆ une normale au plan P .
On pose par definition (D,P) = π2 − (D,∆). C’est un angle compris entre 0 et π
2 .
• On a bien sur (D,P) = 0 si D || P , et (D,P) = π2 si D⊥P .
Exemple :
Sur ce schema, les plans P1,P2 sont perpendiculaires.
D1 est une normale a P1, et D2 une normale a P1.
La mesure des angles (D1,D2) et (P1,P2) est θ.
Les angles (D1,P2) et (D2,P1) valent π2 − θ.
Retour sur le produit vectoriel
Soient u, v deux vecteurs libres de E, et soit P le plan vectoriel qu’ils engendrent.
On oriente P par k unitaire et orthogonal a P .
Posons (u, v) = θ [2π] avec cette orientation.
Alors on a l’egalite u ∧ v = ‖u‖ ‖v‖ sin θ k.
Si on inverse l’orientation de P en choisissant −k
plutot que k, alors θ est change en son oppose.
u ∧ v = ‖u‖ ‖v‖ sin θ k est donc toujours valable.
[email protected] www.mathprepa.com 19 mai 2001 Page 38

Geometrie euclidienne
15.7.2. Isometries en dimension 3
Proposition et definition (Rotations vectorielles)
Soit r une rotation vectorielle de E3 (un element de SO(E3)) distincte de Id.
Alors l’ensemble des vecteurs invariants par r est une droite vectorielle D.
Orientons la droite D (donc l’hyperplan P = D⊥) par le choix d’un vecteur unitaire k de D.
Il existe un reel θ (defini modulo 2π)
tel que la matrice de r dans toute
base orthonormale directe i, j, k soit :
R =
cos θ − sin θ 0sin θ cos θ 0
0 0 1
.
On dit que r est la rotation vectorielle d’angle θ [2π] d’axe D oriente par k.
Avec les notations precedentes,
on voit que la restriction de r au plan P
(oriente par la donnee de k sur D)
est la rotation d’angle θ [2π].
Si on inverse l’orientation de l’axe D,
la mesure de l’angle de la rotation r
est changee en son opposee.
Remarques
• On peut considerer que Id est une rotation d’axe quelconque, d’angle θ = 0 [2π].
Le demi-tour d’axe D est la rotation d’axe D d’angle θ = π [2π].
Dans ces deux cas, on a θ = −θ [2π] : l’orientation de l’axe D est alors sans importance.
• Soit r une rotation d’angle θ [2π] autour d’un axe D oriente.
La quantite cos θ ne depend pas de l’orientation de D.
Si M est la matrice de r dans une base quelconque, on a toujours tr (M) = 2 cos θ + 1.
Par exemple, la matrice M =1
3
2 2 11 −2 22 −1 −2
est dans SO(3).
Elle represente donc une rotation vectorielle d’angle θ [2π] (autour de son axe oriente).
Sans meme connaıtre encore cet axe (on le trouverait en cherchant les vecteurs invariants) ni
avoir choisi son orientation, on sait que 2 cos θ + 1 = tr (M) = −23 .
Proposition (Expression d’une rotation vectorielle)
Soit r la rotation vectorielle d’angle θ [2π] d’axe D oriente par le vecteur unitaire k.
Pour tout vecteur u de E, on a : r(u) = (cos θ)u+ (1− cos θ) (u | k) k + (sin θ)k ∧ u.Si (u | k) = 0, on a : r(u) = (cos θ)u+ (sin θ)k ∧ u.On en deduit, si le vecteur u est unitaire et orthogonal a k,
cos θ = (u | r(u))sin θ = [u, r(u), k]
[email protected] www.mathprepa.com 19 mai 2001 Page 39

Geometrie euclidienne
Voici comment illustrer la proposition precedente.
Le vecteur v est la projection de u sur P = (IRk)⊥.
On a donc v = u− (u | k) k, puis k ∧ v = k ∧ u.Ensuite w est la projection de r(u) sur P .
On a r(u) = (u | k) k + w.
Or w = (cos θ) v + (sin θ) k ∧ u.
On en deduit effectivement :
r(u) = (cos θ)u+ (1− cos θ) (u | k) k + (sin θ) k ∧ u.
Proposition et definition (Rotations affines)
Soit r un deplacement de E3, distinct de Id, et possedant au moins un point invariant Ω.
Alors l’ensemble des points invariants par r est une droite D passant par Ω.
Soit r l’application lineaire associee a r.
r est une rotation vectorielle, distincte de Id, d’axe la direction D de D.
Orientons D (donc D) par la donnee d’un vecteur unitaire k.
Soit θ la mesure (modulo 2π) de l’angle de r.
On dit alors que r est la rotation affine d’angle θ [2π] d’axe D oriente par k.
Remarques
• Les rotations vectorielles sont des cas particuliers de rotations affines : ce sont les rotationsaffines qui laissent fixe l’origine (ou encore dont l’axe passe par 0.)
• Comme pour les rotations vectorielles, si on inverse l’orientation de l’axe D, alors la mesurede l’angle de r est changee en son oppose.
• Le demi-tour d’axe D est la rotation d’axe D et d’angle θ = π [2π]. Il s’agit aussi dela symetrie affine orthogonale par rapport a la droite D. Dans ce cas, il n’est pas utiled’orienter l’axe car la mesure de l’angle est toujours π [2π].
• Toute rotation affine d’axe D est d’une infinite de manieres la composee de deux reflexionsaffines par rapport a des plans contenant D. L’une de ces deux reflexions peut etre choisiede maniere arbitraire, l’autre etant alors definie de maniere unique.
Par exemple, le demi-tour d’axe D est la composee des reflexions s2 et s1 par rapport a deuxplans perpendiculaires quelconques contenant D.
• Soit r la rotation affine d’angle θ [2π] d’axe D oriente par le vecteur unitaire k.
Soit M un point de E3 et soit H sa projection orthogonale sur la droite D.
Alors r(M) = H + (cos θ)−−→HM + (sin θ)k ∧ −−→HM .
Definition (Vissages)
On appelle vissage de E3 le compose commutatif f = r tu = tu r d’une rotation r d’axeD (r 6= Id) et d’une translation de vecteur u 6= −→
0 parallele a la direction D de D.
Si la droite D est orientee et si θ [2π] est la mesure de l’angle de r, on dit que v est le vissaged’angle θ [2π] autour de la droite D orientee, et de vecteur u.
[email protected] www.mathprepa.com 19 mai 2001 Page 40

Geometrie euclidienne
On illustre ici le fonctionnement du vissage f d’angle θ [2π]
autour de la droite D orientee par k, et de translation u.
On voit bien que f = t r = r t.Puisqu’il est compose de deux deplacements,
le vissage f est un deplacementsans point invariant.
Cependant l’axe D est globalement invariant.
Remarques
• On peut trouver les elements caracteristiques du vissage f de la maniere suivante :
La direction D de l’axe D est l’ensemble des vecteurs invariants par f = r.
La droite D est alors l’ensemble des points M de E3 tels que−−−−−→Mf(M) ∈ D.
Le vecteur u de la translation tu est egal a−−−−−→Mf(M), pour tout point M de D.
• Un vissage f = r tu d’axe D peut etre ecrit comme la composee de quatre reflexions :
Deux par rapport a des plans contenant D pour former la rotation r.
Deux par rapport a des plans orthogonaux a D pour former la translation t.
Proposition (Classification des deplacements de E3)
Soit f un deplacement de E3. Soit F le sous-espace affine des points invariants par f .
Alors soit F est egal a E3, soit c’est une droite, soit c’est l’ensemble vide.
Si F est egal a E3, alors f est l’identite.
Si F est une droite, alors f est une rotation d’axe F (avec f 6= Id.)
Si F est vide, alors f est un vissage.
On a ainsi obtenu une classification complete des deplacements de E3.
Proposition (Classification des antideplacements de E3)
Soit f un antideplacement de E3. Soit F le sous-espace affine des points invariants par f .
Alors soit F est un plan, soit c’est un singleton, soit c’est l’ensemble vide.
Si F est un plan affine, alors f est la reflexion par rapport au plan F .
Si F est reduit a un point Ω, alors f est la composee commutative f = r s = s r d’unerotation r (distincte de Id) d’axe une droite D passant par Ω et de la reflexion par rapportau plan F orthogonal en Ω a la droite D.
On trouve la droite D en cherchant les points M tels que−−−−→Ωf(M) = −−−→ΩM .
Si F est vide, alors f est la composee commutative f = tu s = s tu de la reflexion parrapport a un plan P et d’une translation de vecteur non nul u parallele au plan P .
La direction du plan P est Inv f . Un point de P est Ω = 12f(0).
On trouve le vecteur u en ecrivant u = 12(f f)(0), avec un point M quelconque de P .
On a ainsi obtenu une classification complete des antideplacements de E3.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 41

Geometrie euclidienne
Voici un antideplacement f sans point invariant.
f est la composee commutative de la reflexion s
par rapport a un plan P et d’une translation t
de vecteur u appartenant a la direction de P .
Ici le seul point invariant de l’antideplacement f est Ω.
f est la composee commutative de la reflexion s
par rapport a un plan P passant par Ω
et d’une rotation r d’angle θ [2π] autour de
la normale D en Ω a P , orientee par k.
Remarques
• On dispose ainsi d’une classification de toutes les isometries deE3. On note que l’identificationd’une telle isometrie f passe par le calcul du sous-espace affine des points invariants.
• Toute isometrie affine f est la composee d’au plus quatre reflexions :
Une seule reflexion si f est. . . une reflexion.
Deux fois la meme reflexion si f = Id.
Deux reflexions par rapport a des plans paralleles si f est une translation.
Deux reflexions par rapport a des plans secants si f est une rotation.
Trois reflexions si f est antideplacement ayant un seul point fixe Ω (donc si f est lacomposee commutative d’une rotation r d’axe D passant par Ω et de la reflexion relativeau plan P orthogonal a D en Ω.)
Trois reflexions si f est antideplacement n’ayant pas de point fixe (donc la composee d’unereflexion par rapport a un plan P et d’une translation parallele a ce plan.)
Quatre reflexions si f est un vissage (deux pour la rotation, deux pour la translation.)
• Tout automorphisme orthogonal f est la composee d’au plus trois reflexions vectorielles (eneffet f possede au moins l’origine comme point fixe : le dernier cas ne se presente pas.)
On peut conclure en disant que les reflexions vectorielles engendrent le groupe orthogonal deE3, et que les reflexions affines engendrent le groupe des isometries de E3.
[email protected] www.mathprepa.com 19 mai 2001 Page 42

Geometrie euclidienne
15.8. Cercles, spheres
15.8.1. Cercles dans le plan. Generalites.
E designe un plan euclidien oriente.
On notera AB plutot que d(A,B) ou ‖−→AB‖ la distance de deux points A et B.
On notera [A,B] le segment d’extremites A et B.
Si A 6= B, on notera (AB) la droite passant par les points A et B.
DefinitionSoient Ω un point de E et r un reel positif ou nul.
On appelle cercle de centre Ω, de rayon r l’ensemble C(Ω, r) = M ∈ E, ΩM = r.Si r = 0, l’ensemble C(Ω, r) se reduit au point Ω : on parle de cercle-point.
Disque ouvert ou ferme, interieur ou exterieur d’un cercle
Posons D(Ω, r) = M ∈ E, ΩM < r (c’est l’ensemble vide si r = 0.)
D(Ω, r) est appele disque ouvert de centre Ω de rayon r, ou interieur du cercle C(Ω, r).
L’ensemble M ∈ E, ΩM > r est l’exterieur du cercle C.
D(Ω, r) = M ∈ E, ΩM ≤ r est appele disque ferme de centre Ω, de rayon r.
Definition dans le plan complexe
On se place dans le plan lC, muni de sa stucture canonique de plan euclidien.
Le cercle de centre ω et de rayon r est C(ω, r) = z ∈ lC, |z − ω| = r.On peut egalement ecrire : z ∈ C(ω, r) ⇔ |z|2 − 2Re (ωz) + |ω|2 = r2.
L’interieur de C(ω, r) est z ∈ lC, |z − ω| < r.L’exterieur est z ∈ lC, |z − ω| > r.
Equation dans un repere orthonormal
On se place dans un repere orthonormal R du plan E.
Soient (x, y) les coordonnees dans R d’un point M quelconque de E.
Soient (α, β) les coordonnees du point Ω.
On a : M(x, y) ∈ C(Ω, r) ⇔ x2 + y2 − 2αx− 2βy + γ = 0, avec γ = α2 + β2 − r2.
Cette egalite est appelee equation normale du cercle C dans le repere R.
Reciproquement, on se donne trois reels α, β, γ.
Soit C l’ensemble des points M(x, y) tels que x2 + y2 − 2αx− 2βy + γ = 0.
Si α2 + β2 < γ, alors l’ensemble C est vide.
Si α2 + β2 ≥ γ, alors C est le cercle de centre Ω et de rayon r =√α2 + β2 − γ.
[email protected] www.mathprepa.com 19 mai 2001 Page 43

Geometrie euclidienne
Points diametralement opposes
Notons C le cercle de centre Ω et de rayon r.
Le point Ω est un centre de symetrie de C, et c’est le seul.
Les droites contenant Ω sont les seuls axes de symetrie de C.
Deux points de C symetriques par rapport a Ω sont dits diametralement opposes.
Pour tous points A,B de C, on a AB ≤ 2r.
Il y a egalite si et seulement si A et B sont diametralement opposes.
La quantite d = 2r est appelee le diametre du cercle C.
Soit C un cercle du plan.
Soient A,B deux points diametralement opposes de C.
Un point M appartient a C si
et seulement si (−−→MA | −−→MB) = 0.
Si M est distinct de A et B, on a donc :
M ∈ C ⇔ ((MA), (MB)) = π2 [π].
Ainsi un cercle est caracterise par un couple (A,B) de points diametralement opposes.
On dira alors que C est le cercle de diametre [A,B].
Dans lC le cercle de diametre [a, b] est defini par : (z − a)(z − b) ∈ iIR.
Cercle circonscrit a un triangle
On se donne trois points A,B,C non alignes.
Par A,B,C, il passe un cercle C et un seul.
Le centre de C est le point d’intersection
des trois mediatrices du triangle ABC.
On dit que C est le cercle circonscrit au triangle ABC.
Si le triangle ABC est rectangle en A, alors C est le cercle de diametre BC.
Soit H l’orthocentre du triangle ABC.
Les symetriques de H par rapport aux cotes du triangle appartiennent a C.
Il en est de meme des symetriques de H par rapport aux milieux des cotes.
On se place dans un repere orthonormal R du plan.
Soient (xa, ya), (xb, yb), (xc, yc) les coordonnees de A,B,C.
Avec ces notations, l’equation normale du cercle C dans R est∣∣∣∣∣∣∣∣∣x2 + y2 x y 1
x2a + y2
a xa ya 1
x2b + y2
b xb yb 1
x2c + y2
c xc yc 1
∣∣∣∣∣∣∣∣∣ = 0
[email protected] www.mathprepa.com 19 mai 2001 Page 44

Geometrie euclidienne
15.8.2. Intersections de droites et de cercles
Intersection d’une droite et d’un cercle
Notons C le cercle de centre Ω et de rayon r > 0.
Soit D une droite du plan et H la projection orthogonale de Ω sur D.
Si ΩH > r, alors l’intersection de C et de D est vide.
Si ΩH = r, cette intersection se reduit au seul point H.
On exprime cette situation en disant que la droite D est une tangente au cercle D.
Si ΩH < r, alors C ∩ D est constituee de deux points distincts A,B.
Le schema ci-dessous illustre les trois cas possibles :
Tangentes a un cercle
Notons C le cercle de centre Ω et de rayon r > 0.
Par un point interieur a C, il ne passe aucune tangente a C.
Par tout point M de C, il passe une unique
tangente (MT ) a C : la normale en M a (ΩM).
Par tout point N exterieur a C,
il passe exactement deux tangentes (NA) et (NB) a C.
On a les egalites NA = NB =√NΩ2 − r2.
Soient (α, β) les coordonnees de Ω dans un repere orthonormal R du plan E.
Soit D une droite d’equation cartesienne ax+ by + c = 0 dans ce repere.
La droite D est tangente a C si et seulement si (aα+ bβ + c)2 = (a2 + b2)r2.
Exemple : la droite x cos θ+ y sin θ+ c = 0 est tangente a C ⇔ |α cos θ + b sin θ + c| = r.
On suppose que le plan E est rapporte a un repere orthonormal R.
Soit x2 + y2 − 2αx− 2βy + γ = 0 l’equation de C dans R.
Soit M(x0, y0) un point de C. L’equation de la tangente a C en ce point est :
x0x+ y0y − α(x+ x0)− β(y + y0) + γ = 0
On constate que l’equation de la tangente est obtenue par dedoublement des variables.
Dans l’equation de C, on remplace en effet x2 et y2 par xx0 et par yy0.
De la meme maniere, on remplace 2x et 2y par x+ x0 et par y + y0.
[email protected] www.mathprepa.com 19 mai 2001 Page 45

Geometrie euclidienne
Intersection de deux cercles
Soient C et C ′ deux cercles de centres Ω,Ω′ et de rayons r, r′ (avec r′ ≥ r.)
Si ΩΩ′ < r′ − r alors C ∩ C ′ = ∅ : le cercle C est interieur a C ′. Si ΩΩ′ = r′ − r alors C ∩ C ′ se reduit a un point : C est tangent interieurement a C ′. Si r′ − r < ΩΩ′ < r + r′, alors C ∩ C ′ est forme de deux points distincts.
Si ΩΩ′ = r′ + r alors C ∩ C ′ se reduit a un point : C et C ′ sont tangents exterieurement.
Si ΩΩ′ > r′ + r alors C ∩ C ′ = ∅ : chaque cercle est exterieur a l’autre.
Conclusion : les cercles C et C ′ sont secants si et seulement si |r′ − r| ≤ ΩΩ′ ≤ r + r′.
Le schema ci-dessous recapitule tous les cas possibles.
Cercles orthogonaux
Soient C, C ′ deux cercles de centres Ω,Ω′ et de rayons r, r′.
Les conditions suivantes sont equivalentes :
On a l’egalite ΩΩ′ =√r2 + r′2.
Les cercles sont secants en deux points en lesquels les tangentes a C, C ′ sont orthogonales.
Si ces conditions sont reunies, on dit que les deux cercles C et C ′ sont orthogonaux.
On voit ici la configuration de deux cercles orthogonaux.
Notons A,B les points d’intersection des deux cercles.
La tangente en A ou B a l’un des deux cercles
passe par le centre de l’autre.
Les points A,B sont eux-memes sur le cercle
de diametre [Ω,Ω′] (ici en pointilles.)
[email protected] www.mathprepa.com 19 mai 2001 Page 46

Geometrie euclidienne
Puissance d’un point par rapport a un cercle.
Notons C le cercle de centre Ω et de rayon r > 0. Soit M un point du plan E.
La quantite Γ(M) = ΩM2 − r2 est appelee puissance de M par rapport a C.
On a les proprietes suivantes :
Γ(M) < 0 ⇔ M interieur a C ; Γ(M) = 0 ⇔ M ∈ C ; Γ(M) > 0 ⇔ M exterieur a C.
Supposons que l’equation de C dans R (orthonormal) soit x2 + y2 − 2αx− 2βy + γ = 0.
Si les coordonnees de M sont (x0, y0), on a : Γ(M) = x20 + y2
0 − 2αx0 − 2βy0 + γ.
Pour tout couple (A,B) de points diametralement opposes, on a Γ(M) = (−−→MA | −−→MB).
Soit D une droite passant par M et rencontrant C en deux points distincts P,Q.
Alors on a l’egalite Γ(M) = MP MQ.
Supposons que M soit exterieur a C, et soit D une tangente a C passant par M .
Soit H le point commun a D et a C. On a l’egalite Γ(M) = MT 2.
Sur cet exemple, le point M est exterieur a C.
La puissance Γ(M) de M est donc > 0.
On a Γ(M) = MA MB = MC MD.
On a egalement Γ(M) = MT 2.
On a enfin Γ(M) = (−−→MC | −−→MB)
car C et B sont diametralement opposes.
15.8.3. Proprietes angulaires
Proposition
Soit C le cercle de centre Ω et de rayon r > 0.
Soient A,B deux points quelconques de C.
Pour tout point M de C, distinct de A et B, on a :
(−→ΩA,
−→ΩB) = 2
(−−→MA,
−−→MB) [2π].
Consequence
Soit C le cercle de centre Ω et de rayon r > 0.
Soient A,B deux points quelconques de C.
Si M,N sont sur C et distincts de A,B, on a :
(−−→MA,
−−→MB) =
(−−→NA,
−−→NB) [π].
Cet exemple illustre les deux propositions precedentes.
Si
(−−→MA,
−−→MB) = θ [2π], alors
(−→ΩA,
−→ΩB) = 2θ [2π].
Ici on a
(−−→NA,
−−→NB) = θ [2π] et
(−→PA,
−−→PB) = θ + π [2π].
La difference (qui n’existe pas modulo π) vient du fait
que N est sur le meme arc de cercle (delimite par A,B)
que M alors que P est sur l’autre arc.
[email protected] www.mathprepa.com 19 mai 2001 Page 47

Geometrie euclidienne
Reciproque
Soient A,B,C trois points distincts du plan E.
Soit C l’ensemble des points M (distincts de A,B) tels que
(−−→MA,
−−→MB) =
(−→CA,
−−→CB) [π].
L’ensemble C est le cercle circonscrit au triangle ABC, prive de A et B.
Remarque
Avec les notations de la reciproque, on peut considerer les deux conditions suivantes :
(−−→MA,
−−→MB) =
(−→CA,
−−→CB) [2π] definit l’arc de C delimite par A,B et contenant C.
(−−→MA,
−−→MB) =
(−→CA,
−−→CB) + π [2π] definit l’arc de C delimite par A,B ne contenant pas C.
Proposition (Condition de cocyclicite)
Soient A,B,C,D quatre points distincts du plan E.
Ces points sont cocycliques ou alignes si et seulement si ((AC), (AD)) = ((BC), (BD)) [π].
Exemple
Le schema ci-dessous illustre la proposition precedente.
A gauche, on a
(−−→BC,
−−→BD) =
(−→AC,
−−→AD) [2π], et a droite on a
(−−→BC,
−−→BD) =
(−→AC,
−−→AD)+π [2π].
Dans les deux cas, on a ((BC), (BD)) = ((AC), (AD)) [π].
Utilisation du birapport dans lC
On se place dans lC, muni de sa structure canonique de plan euclidien oriente.
On se donne quatre points a, b, c, d distincts.
La quantite (a ; b ; c ; d) =c− a
c− b:d− a
d− best appelee birapport de A,B,C,D.
Les points a, b, c, d sont cocycliques ou alignes ⇔ le birapport (a ; b ; c ; d) est un reel.
Soient a, b, c trois points non alignes de lC.
Soit C le cercle circonscrit au triangle abc.
Une representation parametrique de C estz − a
z − b= λ
c− a
c− b, avec λ ∈ IR.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 48

Geometrie euclidienne
15.8.4. Representation polaire ou parametrique
Notations et remarques
• On suppose que le plan E est rapporte a un repere orthonormal direct (O, e1, e2).
Pour tout reel θ, on note u(θ) = cos θ e1 + sin θ e2.
• Soit M(x, y) un point du plan. Soit (ρ, θ) un couple de reels.
On dit que (ρ, θ) est un couple de coordonnees polaires de M si−−→OM = ρ u(θ).
Cela equivaut a dire que (ρ, θ) sont solutions du systeme
x = ρ cos θ
y = ρ sin θLe point M sera alors note M(ρ, θ).
• Tout point M a une infinite de couples de coordonnees polaires.
On a en effet M(ρ, θ) = M(ρ, θ + 2kπ) = M(−ρ, θ + (2k + 1)π) (avec k dans ZZ).
Pour tout reel θ, (0, θ) est un couple de coordonnees polaires de l’origine.
• Soit Γ un sous-ensemble du plan. Soit F une application de IR2 dans IR.
On dit que F (ρ, θ) = 0 est une equation en polaires de Γ si : M(ρ, θ) ∈ Γ ⇔ F (ρ, θ) = 0.
• Exemples
ρ = r est une equation du cercle de centre O et de rayon |r|. θ = θ0 est une equation de la droite passant par O et d’angle polaire θ0.
Soit D une droite d’equation x cos θ0 + y sin θ0 = h, avec h 6= 0.
Une equation de D en polaires est ρ =h
cos(θ − θ0).
Proposition (Equation en polaires d’un cercle passant par O)
Soit C un cercle du plan, passant par l’origine O.
Soit Ω(a, b) le centre de C, de coordonnees polaires (r, θ0).
Une equation polaire de C est : ρ = 2a cos θ + 2b sin θ, ou encore ρ = 2r cos(θ − θ0).
Cas particuliers :
Le cercle passant par O et centre en Ω(a, 0) est caracterise par ρ = 2a cos θ.
Le cercle passant par O et centre en Ω(0, b) est caracterise par ρ = 2b sin θ.
Le schema ci-dessous presente le cas general, et les deux cas particuliers.
[email protected] www.mathprepa.com 19 mai 2001 Page 49

Geometrie euclidienne
Representations parametriques d’un cercle
On suppose que le plan E est rapporte a un repere orthonormal direct (O, e1, e2).
Soit C le cercle de centre Ω(a, b) et de rayon r > 0.
Une representation parametrique de C est donnee par
x = a+ r cos θ
x = b+ r sin θ, avec −π < θ ≤ π.
Representation parametrique rationnelle
Pour −π < θ < π, on peut exprimer
cos θ, sin θ en fonction de t = tan θ2 .
On obtient alors la representation parametrique :
x = a+ r1− t2
1 + t2, y = b+ r
2t
1 + t2.
Dans cette representation, quand t parcourt IR,
on obtient chaque point de C une fois et une seule,
sauf A(a− r, b) qui serait obtenu quand t→∞.
15.8.5. Exemples de lignes de niveau
DefinitionSoit f une application definie sur le plan E, a valeurs dans IR.
Notons Γλ l’ensemble (eventuellement vide) des points M tels que f(M) = λ.
Les sous-ensembles Γλ sont appeles lignes de niveau de f .
Exemples
On suppose que E est rapporte a un repere orthonormal R = (O, e1, e2).
• Les lignes de niveau de f : M(x, y) 7→ (x− a)2 + (y − b)2 sont les cercles de centre Ω(a, b).
• Soit u un vecteur non nul, et A un point quelconque du plan.
Les lignes de niveau de f : M 7→ (−−→AM | u) sont les droites orthogonales au vecteur u.
Fonction scalaire de Leibniz
Soit (A1, λ1), . . . , (Ap, λp) une famille de points ponderes, de poids total m.
Pour tout point M , on pose f(M) =p∑
k=1
λk AkM2.
On dit que f est la fonction scalaire de Leibniz associee aux points (Ak, λk).
Si m = 0, posons u =p∑
k=1
λkAk. Alors : ∀ (M,A) ∈ E2, f(M) = f(A) + 2(−−→AM | u).
Si u =−→0 , l’application f est constante.
Si u 6= −→0 , les lignes de niveau de f sont les droites orthogonales au vecteur u.
Si m 6= 0, soit G le barycentre des (Ak, λk). Alors ∀M ∈ E, f(M) = f(G) +mGM2.
Les differentes lignes de niveau de f sont donc, suivant les valeurs de λ, ou bien vides oubien egales a un cercle de centre G (eventuellement reduit au seul point G).
[email protected] www.mathprepa.com 19 mai 2001 Page 50

Geometrie euclidienne
Lignes de niveau de f : M 7→ (−−→MA | −−→MB)
On se donne deux points A,B du plan E, et on definit f : M 7→ (−−→MA | −−→MB).
Soit Ω le milieu du segment [A,B]. Alors, pour tout M de E, f(M) = ΩM2 − 14AB
2.
Si on note d la longueur du segment [A,B], on a donc : f(M) = λ ⇔ ΩM2 = λ+ d2
4 .
L’ensemble Γλ = M ∈ E, (−−→MA | −−→MB) = λ est donc :
L’ensemble vide si λ < −d2
4 , et un cercle de centre Ω si λ ≥ −d2
4 .
Ce cercle est reduit a Ω si λ = −d2
4 , et c’est le cercle de diametre [A,B] si λ = 0.
Supposons qu’une equation de la droite (AB) soit ux+ vy + w = 0.
Alors les equations (−−→MA | −−→MB)+α(ux+vy+w) = 0 definissent les cercles passant par A,B.
Lignes de niveau de f : M 7→ MAMB
On se donne deux points A,B distincts du plan, et on definit l’application f : M 7→ MAMB .
Pour tout λ > 0, on note Cλ l’ensemble des points M tels que f(M) = λ.
Si λ = 1, on obtient la mediatrice du segment [A,B]. Supposons donc λ 6= 1.
Sur la droite (AB), soit G le barycentre de (A, 1), (B,−λ) et soit H celui de (A, 1), (B, λ).
Le point H est toujours strictement compris entre A et B.
Le point G est exterieur a [A,B] (du cote de A si 0 < λ < 1, du cote de B sinon.)
Pour tout point M , on a donc
−−→MA− λ
−−→MB = (1− λ)
−−→MG
−−→MA+ λ
−−→MB = (1 + λ)
−−→MH
On a les equivalences :
M ∈ Cλ ⇔ MA2 = λ2MB2 ⇔ (−−→MA− λ
−−→MB | −−→MA+ λ
−−→MB) = 0 ⇔ (
−−→MG | −−→MH) = 0
On en deduit que Cλ est le cercle de diametre [G,H].
Comme on le voit ci-dessous, les cercles Cλ forment un “faiceau”.
A et B sont les “points-limites” de ce faisceau, obtenus quand t→ 0 et quand t→ +∞.
La mediatrice de [A,B] correspond a λ = 1. Pour 0 < λ < 1 on obtient les cercles qui sontdu cote de A, et pour λ > 1 on obtient ceux qui sont du cote de B.
Cλ et C1/λ sont symetriques l’un de l’autre par rapport a la mediatrice de [A,B].
[email protected] www.mathprepa.com 19 mai 2001 Page 51

Geometrie euclidienne
Lignes de niveau de f : M 7→ (−−→MA,
−−→MB)
Soient A,B deux points distincts du plan.
Soit g l’application M 7→ (−−→MA,
−−→MB) [π].
Soit θ un reel de [0, π[.
On note C ′θ = M ∈ E, g(M) = θ [π].Si θ = 0, on trouve la droite (AB) (privee de A et B.)
On suppose donc 0 < θ < π.
C ′θ est alors un cercle passant par A et B
(mais prive de ces deux points.)
Les cercles C ′θ forment un “faiceau”.
La droite (AB) est la position-limite,
obtenue quand θ → 0 et quand θ → π.
Tous les cercles passent par A et B.
Le cercle de diametre [A,B] est obtenu pour θ = π2 .
Si ϕ = π − θ, les Les cercles C ′θ et C ′ϕsont symetriques l’un de l’autre par rapport a (AB).
On montre que les cercles Cλ sont deux a deux orthogonaux aux cercles C ′θ, comme on le voitsur la representation graphique ci-dessous :
[email protected] www.mathprepa.com 19 mai 2001 Page 52

Geometrie euclidienne
15.8.6. Complement : cercle inscrit, cercles exinscrits
Dans ce paragraphe, on se donne trois points A,B,C non alignes du plan E.
Cercle inscrit a un triangle
Soit DA la droite bissectrice des demi-droites [A,B[ et [A,C[.
La droite DA est appelee bissectrice interieure de sommet A du triangle ABC.
On definit de meme les bissectrices interieures de sommets B et C.
Les trois bissectrices interieures se coupent en un point I interieur a ABC.
Ce point est le centre d’un cercle tangent aux trois cotes du triangle.
On l’appelle le cercle inscrit au triangle ABC.
On montre que les projections orthogonales
de I sur les droites (AB), (BC), (CA) appartiennent
aux intervalles ouverts ]A,B[, ]B,C[, ]C,A[.
Si on note a, b, c les longueurs des cotes BC,CA,AB,
on montre que I est barycentre de (A, a), (B, b), (C, c).
On montre que les droites joignant un sommet du triangle au point de contact du cercleinscrit avec le cote oppose sont concourantes (c’est le point de Gergonne de ABC.)
Cercles exinscrits a un triangle
La bissectrice exterieure de [A,B[ et [A,C[ est appelee bissectrice exterieure en A a ABC.
On definit de meme les bissectrices
exterieures de sommets B et C.
La bissectrice interieure relative a un sommet
et les bissectrices exterieures relatives aux deux
autres sommets sont toujours concourantes.
On obtient ainsi trois points JA, JB, JC
exterieurs au triangle ABC et qui
sont les centres de trois cercles CA, CB, CC
tangents aux trois droites (AB), (BC), (CA).
Ces trois cercles sont dits exinscrits au triangle ABC.
Si on note a, b, c les longueurs des cotes BC,CA,AB, on montre que :
Le point JA est barycentre de (A,−a), (B, b), (C, c). Le point JB est barycentre de (A, a), (B,−b), (C, c). Le point JC est barycentre de (A, a), (B, b), (C,−c).
On montre que les droites joignant un sommet du triangle au point de contact du cercleexinscrit sur le cote oppose sont concourantes (c’est le point de Nagel de ABC.)
[email protected] www.mathprepa.com 19 mai 2001 Page 53

Geometrie euclidienne
15.8.7. Spheres dans l’espace
E designe maintenant un espace euclidien oriente de dimension 3.
On notera AB la distance de deux points A et B.
DefinitionSoient Ω un point de E et r un reel positif ou nul.
On appelle sphere de centre Ω et de rayon r l’ensemble S(Ω, r) = M ∈ E, ΩM = r.Si r = 0, l’ensemble S(Ω, r) se reduit au point Ω : on parle de sphere-point.
Boule ouverte ou fermee, interieur ou exterieur d’une sphere
Posons B(Ω, r) = M ∈ E, ΩM < r (c’est l’ensemble vide si r = 0.)
B(Ω, r) est la boule ouverte de centre Ω de rayon r, ou interieur de la sphere S(Ω, r).
L’ensemble M ∈ E, ΩM > r est l’exterieur de la sphere S.
B(Ω, r) = M ∈ E, ΩM ≤ r est la boule fermee de centre Ω, de rayon r.
Equation dans un repere orthonormal
On se place dans un repere orthonormal R de l’espace E.
Soient (x, y, z) les coordonnees dans R d’un point M quelconque de E.
Soient (α, β, γ) les coordonnees du point Ω. On a :
M(x, y, z) ∈ S(Ω, r) ⇔ (x− α)2 + (y − β)2 + (z − γ)2 = r2
⇔ x2 + y2 + z2 − 2αx− 2βy − 2γz + δ = 0
avec δ = α2 + β2 + γ2 − r2
Cette egalite est appelee equation normale de la sphere S dans le repere R.
Reciproquement, on se donne quatre reels α, β, γ, δ.
Soit S l’ensemble des points M(x, y, z) tels que x2 + y2 + z2 − 2αx− 2βy − 2γz + δ = 0.
Si α2 + β2 + γ2 < δ, alors l’ensemble S est vide.
Si α2 + β2 + γ2 ≥ δ, alors S est la sphere de centre Ω et de rayon r =√α2 + β2 + γ2 − δ.
Points diametralement opposes
Notons S la sphere de centre Ω et de rayon r.
Le point Ω est un centre de symetrie de S, et c’est le seul.
Les droites contenant Ω sont les seuls axes de symetrie de S.
Les plans contenant Ω sont les seuls plans de symetrie de S.
Deux points de S symetriques par rapport a Ω sont dits diametralement opposes.
Pour tous points A,B de S, on a AB ≤ 2r.
Il y a egalite si et seulement si A et B sont diametralement opposes.
La quantite d = 2r est appelee le diametre de la sphere S.
On dira aussi que S est la sphere de diametre [A,B].
[email protected] www.mathprepa.com 19 mai 2001 Page 54

Geometrie euclidienne
Proposition (Caracterisation par un produit scalaire)
Soit S une sphere de E, et soient A,B deux points diametralement opposes de S.
Un point M appartient a S si et seulement si (−−→MA | −−→MB) = 0.
Si M est distinct de A et B, on a donc : M ∈ S ⇔ ((MA), (MB)) = π2 .
Sphere passant par quatre points non coplanaires
Par quatre points A,B,C,D non coplanaires, il passe une sphere et une seule.
Son centre est le point d’intersection des plans mediateurs de [A,B], [A,C], [A,D].
On se place dans un repere orthonormal R de E.
Soient (xa, ya, za), (xb, yb, zb), (xc, yc, zc), (xd, yd, zd) les coordonnees de A,B,C,D.
Avec ces notations, l’equation normale de la sphere S dans R est∣∣∣∣∣∣∣∣∣∣∣
x2 + y2 + z2 x y z 1
x2a + y2
a + z2a xa ya za 1
x2b + y2
b + z2b xb yb zb 1
x2c + y2
c + z2c xc yc zc 1
x2d + y2
d + z2d xd yd zd 1
∣∣∣∣∣∣∣∣∣∣∣= 0
Intersection d’un plan et d’une sphere
Notons S la sphere de centre Ω et de rayon r > 0.
Soit P un plan de E et H la projection orthogonale de Ω sur P .
Si ΩH > r, alors l’intersection de S et de P est vide.
Si ΩH = r, cette intersection se reduit au seul point H.
On exprime cette situation en disant que le plan P est tangent a la sphere S.
Si ΩH < r, alors S ∩ P est un cercle de centre H dans le plan P .
Plans tangents a une sphere
Notons S la sphere de centre Ω et de rayon r > 0.
Par un point interieur a S, il ne passe aucun plan tangent a S.
Par tout point M de S, il en passe un seul : le plan orthogonal en M a (ΩM).
Par tout point M exterieur a S, il passe une infinite de plans tangents.
Soient (α, β, γ) les coordonnees de Ω dans un repere orthonormal R de E.
Soit P un plan d’equation cartesienne ax+ by + cz + d = 0 dans ce repere.
Le plan P est tangent a S si et seulement si (aα+ bβ + cγ + d)2 = (a2 + b2 + c2)r2.
On suppose que E est rapporte a un repere orthonormal R.
Soit x2 + y2 + z2 − 2αx− 2βy − 2γz + δ = 0 l’equation de S dans R.
Soit M(x0, y0, z0) un point de S. L’equation du plan tangent a S en ce point est :
x0x+ y0y + z0z − α(x+ x0)− β(y + y0)− γ(z + z0) + δ = 0
On constate que cette equation est obtenue par dedoublement des variables.
Jean-Michel.Ferrard @ac-lyon.fr www.mathprepa.com 19 mai 2001 Page 55

Geometrie euclidienne
Intersection de deux spheres
Soient S et S ′ deux spheres de centres Ω,Ω′ et de rayons r, r′ (avec r′ ≥ r.)
Si ΩΩ′ < r′ − r alors S ∩ S ′ = ∅ : la sphere S est interieure a S ′. Si ΩΩ′ = r′ − r alors S ∩ S ′ se reduit a un point : S est tangente interieurement a S ′. Si r′ − r < ΩΩ′ < r + r′, alors S ∩ S ′ est un cercle, dans un plan orthogonal a l’axe ΩΩ′.
Si ΩΩ′ = r′ + r alors S ∩ S ′ se reduit a un point : S et S ′ sont tangentes exterieurement.
Si ΩΩ′ > r′ + r alors S ∩ S ′ = ∅ : chaque sphere est exterieure a l’autre.
Conclusion : les spheres S et S ′ se rencontrent si et seulement si |r′ − r| ≤ ΩΩ′ ≤ r + r′.
Puissance d’un point par rapport a une sphere.
Notons S la sphere de centre Ω et de rayon r > 0. Soit M un point de E.
La quantite Γ(M) = ΩM2 − r2 est appelee puissance de M par rapport a S.
On a les proprietes suivantes :
Γ(M) < 0 ⇔ M interieur a S ; Γ(M) = 0 ⇔ M ∈ S ; Γ(M) > 0 ⇔ M exterieur a S.
Soit x2 + y2 + z2 − 2αx− 2βy − 2γz + δ = 0 l’equation de S dans R (orthonormal).
Si M a pour coordonnees (x0, y0, z0), Γ(M) = x20 + y2
0 + z20 − 2αx0 − 2βy0 − 2γz0 + δ.
Pour tout couple (A,B) de points diametralement opposes, on a Γ(M) = (−−→MA | −−→MB).
Soit D une droite passant par M et rencontrant S en deux points distincts P,Q.
Alors on a l’egalite Γ(M) = MP MQ.
Supposons que M soit exterieur a S, et soit P un plan tangent a S passant par M .
Soit H le point commun a P et a S. On a l’egalite Γ(M) = MT 2.
Representation parametrique
On suppose que le plan E est rapporte a un repere orthonormal direct (O, e1, e2, e3).
Soit Ω un point de coordonnees a, b, c dans ce repere.
Soit S la sphere de centre Ω de rayon r.
Une representation parametrique de S est
x = a+ r cosϕ sin θ
y = b+ r sinϕ sin θ
z = c+ r cos θ
, avec
θ ∈ [0, π]
ϕ ∈]− π, π]
Lignes de niveau de f : M 7→ MAMB
Soient A,B deux points distincts, et Sλ l’ensemble des points M tels que MAMB = λ > 0.
Si λ = 1, on obtient le plan mediateur du segment [A,B]. Supposons donc λ 6= 1.
Soit G le barycentre de (A, 1), (B,−λ) et soit H celui de (A, 1), (B, λ).
Pour tout point M , on a donc
−−→MA− λ
−−→MB = (1− λ)
−−→MG
−−→MA+ λ
−−→MB = (1 + λ)
−−→MH
On a les equivalences :
M ∈ Sλ ⇔ MA2 = λ2MB2 ⇔ (−−→MA− λ
−−→MB | −−→MA+ λ
−−→MB) = 0 ⇔ (
−−→MG | −−→MH) = 0
On en deduit que Sλ est une sphere de diametre [G,H].
[email protected] www.mathprepa.com 19 mai 2001 Page 56




















![G eom etrie affine et projective - unice.frlabourie/preprints/pdf/geomproj.pdfChapitre 1 G eom etrie a ne 1.1 Points et vecteurs 1.1.1 Espace a ne D e nition 1.1.1 [Espace affine]](https://img.dokumen.tips/doc/110x75/611999df440ea477951d3cbf/g-eom-etrie-affine-et-projective-unicefr-labouriepreprintspdf-chapitre-1-g.jpg)








