Embed Size (px)
Citation preview

A Belief Evaluation Framework in AutonomousMANETs under Noisy and Imperfect
Observation: Vulnerability Analysis andCooperation Enforcement
Zhu Ji, Wei Yu, and K.J. Ray Liu, Fellow, IEEE
Abstract—In autonomous mobile ad hoc networks (MANETs) where each user is its own authority, the issue of cooperation
enforcement must be solved first to enable networking functionalities such as packet forwarding, which becomes very difficult under
noisy and imperfect monitoring. In this paper, we consider cooperation enforcement in autonomous mobile ad hoc networks under noisy
and imperfect observation and study the basic packet forwarding among users through the repeated game models with imperfect
information. A belief evaluation framework is proposed to obtain cooperation-enforcement packet forwarding strategies only based on
each node’s private information including its own past actions and imperfect observation of other nodes’ information. More importantly,
we not only show that the proposed strategy with belief system can maintain the cooperation paradigm but also establish its performance
bounds. The simulation results illustrate that the proposed belief evaluation framework can enforce the cooperation with only a small
performance degradation compared with the unconditionally cooperative outcomes when noisy and imperfect observation exist.
Index Terms—Belief evaluation, MANETs, cooperation enforcement, game theory.
Ç
1 INTRODUCTION
MOBILE ad hoc networks (MANETs) have drawnextensive attention in recent years due to the
increasing demands of their potential applications [1], [2].In traditional crisis or military situations, the nodes in aMANET usually belong to the same authority and work in afully cooperative way of unconditionally forwarding pack-ets for each other to achieve their common goals. Recently,the MANETs are also envisioned to be deployed for civilianapplications [3], [4], [5], [6], [7], [8], [9], where nodestypically do not belong to a single authority and may notpursue a common goal. Consequently, fully cooperativebehaviors cannot be directly assumed, as the nodes areselfish to maximize their own interests. We refer to suchnetworks as autonomous (or self-organized) MANETs.
However, before ad hoc networks can be successfullydeployed in an autonomous way, the issue of cooperationenforcement must be resolved first. One way to enforcecooperation among selfish nodes is to use payment-basedschemes, such as [6], [8], in which a selfish node willforward packets for other nodes only if it can get somepayment from those requesters as compensation. Anotherway to enforce cooperation among selfish nodes is to use
reputation-based schemes with necessary traffic monitoringmechanisms, such as [3], [4], [5], [7], [10], in which a nodedetermines whether it should forward packets for othernodes or request other nodes to forward packets for it basedon their past behaviors. In [3], a reputation-based systemwas proposed for ad hoc networks to mitigate nodes’misbehaviors, where each node launches a “watchdog” tomonitor its neighbors’ packet forwarding activities. Follow-ing [3], CORE and CONFIDANT systems [4], [5] wereproposed to enforce cooperation among selfish nodes whichaim at detecting and isolating misbehaving node and thusmaking it unattractive to deny cooperation. Moreover,ARCS was proposed in [7] to further defend against variousattacks while providing the incentives for cooperation.
Recently, some efforts have been made toward mathema-
tical analysis of cooperation in autonomous ad hoc networks
using game theory, such as [9], [11], [12], [13], [14]. In [9],
Srinivasan et al. provided a mathematical framework for
cooperation in ad hoc networks, which focuses on the
energy-efficient aspects of cooperation. In [11], Michiardi
and Molva studied the cooperation among selfish nodes in a
cooperative game theoretic framework. In [12], Altman et al.
studied the packet forwarding problem using a noncoopera-
tive game theoretic framework. Further, Trust modeling and
evaluation framework [15], [16] have been extensively
studied to enhance cooperation in autonomous distributed
networks, which utilized trust (or belief) metrics to assist
decision making in autonomous networks through trust
recommendation and propagation. In [13], [14], the reputa-
tion frameworks based on Bayesian formulation were
proposed to increase the integrity and cooperation of
wireless ad hoc or sensor networks.
1242 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
. Z. Ji is with Qualcomm Incorporated, 5775 Morehouse Drive, San Diego,CA 92121. E-mail: [email protected].
. W. Yu is with Microsoft Corporation, One Microsoft Way, Redmond, WA98052. E-mail: [email protected].
. K.J.R. Liu is with the Department of Electrical and Computer Engineeringand the Institute for Systems Research, University of Maryland, 2232 KimBuilding, College Park, MD 20742. E-mail: [email protected].
Manuscript received 6 Feb. 2009; revised 9 Oct. 2009; accepted 3 Dec. 2009;published online 28 Apr. 2010.For information on obtaining reprints of this article, please send e-mail to:[email protected], and reference IEEECS Log Number TMC-2009-02-0042.Digital Object Identifier no. 10.1109/TMC.2010.87.
1536-1233/10/$26.00 � 2010 IEEE Published by the IEEE CS, CASS, ComSoc, IES, & SPS
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

One major drawback of these existing game theoreticanalyses on cooperation in autonomous ad hoc networkslies in that all of them have assumed perfect observation.However, in autonomous ad hoc networks, even when anode has decided to forward a packet for another node, thispacket may still be dropped due to link breakage ortransmission errors. Further, since central monitoring is, ingeneral, not available in autonomous ad hoc networks,perfect public observation is either impossible or tooexpensive. Therefore, how to stimulate cooperation andanalyze the efficiency of possible strategies in the scenarioswith noisy and imperfect observation is still unanswered inautonomous ad hoc networks.
In this paper, we study the cooperation enforcement forautonomous mobile ad hoc networks under noisy andimperfect observation and focus on the most basic network-ing functionality, namely packet forwarding. Consideringthe nodes need to infer the future actions of other nodes basedon their own imperfect observations, in order to optimallyquantify the inference process with noisy and imperfectobservation, a belief evaluation framework is proposed tostimulate the packet forwarding between nodes and max-imize the expected payoff of each selfish node by usingrepeated game theoretical analysis. Specifically, a formalbelief system using Bayes’ rule is developed to assign andupdate beliefs of other nodes’ continuation strategies for eachnode based on its private imperfect information. Further, wenot only show that the packet forwarding strategy obtainedfrom the proposed belief evaluation framework achieves asequential equilibrium [17] that guarantees the strategy to becheat-proof but also derive its performance bounds. Thesimulation results illustrate that the proposed packet for-warding approach can enforce the cooperation in autono-mous ad hoc networks under noisy and imperfectobservation with only a small performance degradationcompared to the unconditionally cooperative outcomes.
The rest of this paper is organized as follows: In Section 2,we illustrate the system model of autonomous ad hocnetworks under noisy and imperfect observation and derivecorresponding game theoretical formulation. Vulnerabilityanalysis for autonomous MANETs under noisy and imper-fect observation is carried out in Section 3. In Section 4, wepropose the belief evaluation framework and carry out theequilibrium and efficiency analysis for one-hop and multi-node multihop packet forwarding. The simulation studies areprovided in Section 5. Finally, Section 6 concludes this paper.
2 SYSTEM MODEL AND GAME THEORETICAL
FORMULATION
2.1 System Model
We consider autonomous ad hoc networks where nodesbelong to different authorities and have different goals.Assume all nodes are selfish and rational, that is, theirobjectives are to maximize their own payoff, not to causedamage to other nodes. Each node may act as a serviceprovider, scheduling packets to be generated and deliveredto certain destinations, or act as a relay, forwarding packetsfor other nodes. The sender will get some payoffs if thepackets are successfully delivered to the destination and the
forwarding effort of relay nodes will also introduce certaincosts.
In this paper, we assume that some necessary trafficmonitoring mechanisms, such as those described in [3], [6],[7], will be launched by each node to keep tracking of itsneighbors’ actions. However, it is worth mentioning that wedo not assume any public or perfect observation, where apublic observation means that when an action happens, agroup of nodes in the network will have the sameobservation, and perfect observation means all actions canbe perfectly observed without any mistake. In ad hocnetworks, due to its multihop nature and the lack of centralmonitoring mechanism, public observation is usually notpossible. Meanwhile, to our best knowledge, there exist nosuch monitoring mechanisms in ad hoc networks that canachieve perfect observation. Instead, in this paper, we studythe cooperation-enforcement strategies based on imperfectprivate observation. Here, private means that the observa-tion of each node is only known to itself and won’t orcannot be revealed to others.
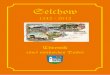
We focus on two scenarios causing imperfect observationin ad hoc networks. One scenario is that the outcome of aforwarding action maybe a packet-drop due to link break-age or transmission errors. The other scenario is that a nodehas dropped a packet but is observed as forwarding thepacket, which may happen when the watchdog mechanism[3] is used and the node wants to cheat its previous node onthe route. Fig. 1 illustrates our system model by showing anetwork snapshot of one-hop packet forwarding betweentwo users at a certain time stage under noisy and imperfectobservation. In this figure, there are two source-destinationpairs ðS1; D1Þ and ðS2; D2Þ. S1 and S2 need to help eachother to forward packets to the destination nodes. At thisstage, node S1 drops the packet and observes the packet-drop signal of node S2’s action, while node S2 forwards thepacket and observes the forwarding signal of node S1’saction. The action and observation of each node are onlyknown to itself and cannot or will not be revealed to othernodes. Due to transmission errors or link breakage betweenS2 and D1, S2’s forwarding action is observed as a packet-drop signal; due to possible cheating behavior between S1
and D2, a forfeit forwarding signal maybe observed by S2.Therefore, it is important to design strategies for each nodeto make the optimal decision solely based on theseimperfect private information.
2.2 Static and Repeated Packet Forwarding GameModel
We model the process of routing and packet forwardingbetween two nodes forwarding packets for each other as agame. The players of the game are two network nodes,
JI ET AL.: A BELIEF EVALUATION FRAMEWORK IN AUTONOMOUS MANETS UNDER NOISY AND IMPERFECT OBSERVATION... 1243
Fig. 1. Packet forwarding in autonomous ad hoc networks under noisyand imperfect observation.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

denoted by i 2 I ¼ f1; 2g. Each player is able to serve as therelay for the other player and needs the other player toforward packets for him based on current routing selectionand topology. Each player chooses his action, i.e., strategy,ai from the action set A ¼ fF;Dg, where F and D are packetforwarding and dropping actions, respectively. Also, eachplayer observes a private signal ! of the opponent’s actionfrom the set � ¼ ff; dg, where f and d are the observationsof packet forwarding and dropping signals, respectively.Since the player’s observation cannot be perfect, theforwarding action F of one player maybe observed as dby the other player due to link breakage or transmissionerrors. We let such probability be pf . Also, the noncoopera-tion action D maybe observed as the cooperation signal funder certain circumstances. Without loss of generality, letthe observation error probability be pe in our system, whichis usually caused by malicious cheating behaviors andindicates that the group of packets is actually droppedthough forwarding signal f is observed. For instance, if thedestination node is colluding with the relay node, it cansend back an acknowledgment even if it doesn’t receive thepackets. Another scenario in which pe > 0 is that if there isdedicated control channel between the source and destina-tion that is different from data channel and only responsiblefor sending feedback, the physical channel errors may causethe NACK message to be decoded as ACK message. Foreach node, the cost of forwarding a group of packets for theother node during one stage of play is ‘, and the gain it canget for the packets that the other node has forwarded for itis ~g. Usually, the gain of successful transmission is for boththe source and destination nodes. Noting that the sourceand destination pair in ad hoc networks usually serves for acommon communication goal, we consider the gain goes tothe source for the game modeling without loss of generality.
We first consider the packet forwarding as a static game[18], which is only played once. Given any action profilea ¼ ða1; a2Þ, we refer to uðaÞ ¼ ðu1ðaÞ; u2ðaÞÞ as the ex-pected payoff profile. Let a�i and Probð!ija�iÞ be theaction of the ith player’s opponent and the probability ofobservation !i given a�i, respectively. Then, uiðaÞ can beobtained as follows:
uiðaÞ ¼X
!i2�
~uiðai; !i; a�iÞ � Probð!ija�iÞ; ð1Þ
where ~ui is the ith player’s payoff determined by the actionprofile and his own observation. Then, calculating uðaÞ fordifferent strategy pairs, we have the strategic form of thestatic packet forwarding game as a matrix in Fig. 2. Notethat g ¼ ð1� pfÞ � ~g, which can be obtained from (1)considering the possibility of the packet-drop.
To analyze the outcome of a static game, the NashEquilibrium [17], [18] is a well-known concept, which is aset of strategies, one for each player, such that no selfishplayer has incentive to unilaterally change his/her action.Noting that our two-player packet forwarding game issimilar to the setting of the prisoner’s dilemma game, theonly Nash equilibrium is the action profile a� ¼ ðD;DÞ, andthe better cooperation payoff outcome ðg� ‘; g� ‘Þ of thecooperation action profile fF; Fg cannot be practicallyrealized in the static packet forwarding game due to the
greediness of the players. However, generally speaking, theabove packet forwarding game will be played many timesin real ad hoc networks. It is natural to extend the abovestatic game model to a multistage game model [18].Considering that the past packet forwarding behaviors donot influence the feasible actions or payoff function atcurrent stage, the multistage packet forwarding game canbe further analyzed using the repeated game model [17],[18]. Basically, in the repeated games, the players face thesame static game at every period, and the player’s overallpayoff is a weighted average of the payoffs at each stageover time. Let !ti be the privately observed signal of theith player in period t. Suppose that the game begins inperiod 0 with the null history h0. In this game, a privatehistory for player i at period t, denoted by hti, is a sequenceof player i’s past actions and signals, i.e., hti ¼ fa�i ; !�i g
t�1�¼1.
Let Hti ¼ ðA� �Þt be the set of all possible period-t histories
for the ith player. Denote the infinite packet forwardingrepeated game with imperfect private histories by Gðp; �Þ,where � 2 ð0; 1Þ is the discount factor and p ¼ ðpf ; peÞ.Assume that pf < 1=2 and pe < 1=2. Then, the overalldiscounted payoff for player i 2 I is defined as follows [18]:
Uið�Þ ¼ ð1� �ÞX1
t¼0
�tuti�at1�ht1�; at2�ht2��: ð2Þ
Folk Theorems for infinite repeated games [18] assert thatthere exists �̂ < 1 such that any feasible and individuallyrational payoff can be enforced by an equilibrium for all� 2 ð�̂; 1Þ based on the public information shared by players.However, one crucial assumption for the Folk Theorems isthat players share common information about each other’sactions. In contrast, the nature of our repeated packetforwarding game for autonomous ad hoc networks deter-mines that the nodes’ behavioral strategies can only rely onthe private information histories including their own pastactions and imperfectly observed signals.
Such a minor game-setting change from the publicobservation to the private observation due to noisy andimperfect observation will make a substantial difference inanalyzing the efficiency of the packet forwarding game. Inthe situation of imperfect private observation, no recursivestructure [19] exists for the forwarding strategies since theplayer decides their actions according to various privatehistories. Each node must conduct statistical inference todetect potential deviations and estimate what others aregoing to do next, which can become extremely complex dueto the imperfect observation [20], [21].
1244 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
Fig. 2. Two-player packet forwarding game in strategic form.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

3 VULNERABILITY ANALYSIS
In this section, we analyze the vulnerability caused by noisyand imperfect observation in autonomous MANETs. First,we study the system vulnerability in the scenario of one-hop packet forwarding. Then, we further exploit the effectof noisy and imperfect observation in the scenario ofmultihop packet forwarding.
In the scenario of one-hop packet forwarding, theinteractions between a pair of nodes forwarding packetsfor each other can be modeled as the two-player game in theprevious section. Although it is seemingly a minor game-setting change from the public observation to the privateobservation due to noisy and imperfect observation, suchchange on game-setting introduces substantial challenges onthe interactions, outcomes, and efficiency of our packetforwarding game, which can be illustrated as follows: First,the observation errors caused by the noisy and imperfectobservation indicate that simple TIT-for-TAT [12], [22]strategies are not able to enforce efficient cooperationparadigm among users since such equivalent retaliationstrategy leads to inefficient noncooperative outcomes.Second, considering the selfishness of the users along withthe effects of noisy and imperfect observations, the userswon’t share their action information or observations ofothers’ actions, which indicates that no public informationavailable for the users. Therefore, the users are not able tocoordinate their strategies for efficient outcomes relying onlyon private histories, i.e., no recursive structure [19] exists forthe forwarding strategies since the players decide theiractions according to various private histories. Third,although the dynamic game theory has studied and definedthe equilibrium concepts on the outcomes of the game withimperfect information, such as Sequential Equilibrium (SE)[17], [18] or Perfect Bayesian Equilibrium (PBE) [17], [18], itdoesn’t provide generalized efficient mechanisms to achieveSE or PBE in the scenarios of private information. Note thatgenerous tit-for-tat (GTFT) [9], [22], [23] is able to partlyalleviate the impact of noisy and imperfect observation onthe efficiency of the packet forwarding game outcomes byassuming that the nodes may be generous to contribute moreto the network than to benefit from it. However, GTFT is lackoff of a formalized structure of the belief definition and beliefupdating. It is difficult to extend GTFT to the multiplayergame scenarios that need user coalition to achieve coopera-tion and improve the efficiency such as the multihopmultinode MANETs. Also, the existing GTFT researchdoesn’t consider the observation error pe defined in Section 2.
Based on the above discussions, the noisy and imperfectobservation causes several vulnerability issues even forsimple one-hop packet forwarding in autonomous MANETs,which can be illustrated as follows:
. Since the nodes make decisions based on privateinformation, each node must conduct statisticalinference to detect potential deviations and estimatewhat others are going to do next. The constraint ofthe noisy and imperfect observation will result infalse alarms or detection errors. Selfish nodes maybeable to utilize such fact to contribute fewer effortswhile getting more benefits from others.
. Considering that the nodes are not willing to or notable to share their information, the nodes cannot rely
on others’ past experiences or recommendations onthe nodes’ behaviors, which gives the selfish nodesmore flexibility on their cheating behaviors.
. Due to the observation errors, the cooperative nodesmay falsely accuse other cooperative nodes ofseemingly noncooperative behaviors, which is actu-ally caused by link breakage or transmission errors.How to maintain the cooperative paradigm in suchscenarios remains a challenging problem.
In the scenario of multinode and multihop packetforwarding, more sophisticated vulnerability issues willbe raised considering the challenges of the self-organizingrouting and the correlation of the nodes’ actions. In general,due to the multihop nature, when a node wants to send apacket to a certain destination, a sequence of nodes need tobe requested to help forwarding this packet. We refer to thesequence of (ordered) nodes as a route, the intermediatenodes on a route as relay nodes, and the procedure todiscover a route as route discovery. In general, the routingprocess includes route discovery and packet forwarding.The route discovery carries out three steps consecutively.First, the requester notifies the other nodes in the networkthat it wants to find a route to a certain destination. Second,other nodes in the network will make their decisions onwhether agreeing to be on the discovered route or not.Third, the requester will determine which route should beused. Based on the discussion of the routing process, we cansee that the action and observation of one node on a routewill largely affect the behaviors of other nodes on this routeor alternative routes between the source and destinationnodes, which in reverse affects the behavior of the originalnode. The above properties of multinode and multihoppacket forwarding may introduce more vulnerability issuesthan one-hop packet forwarding illustrated as follows:
. In the scenarios of multiple nodes on one route, itbecomes very difficult to detect the users withcheating behaviors only based on the private andincomplete local information available to each node.
. Since the routing process involves different steps,the seemingly cooperative behaviors at each stagemay jointly have cheating effects across multiplesteps. From the game theoretical point of view, eachstage game in our dynamic packet forwarding gameconsists of several subgames, such as route partici-pation subgame or route selection subgame. Thevulnerability issues need to be considered not onlyfor each subgame but also for the overall game.
. The multihop routing makes the observation ofnodes more difficult as the packet-drop action at onenode will affect the outcome of the multihop routing.Such propagation effects can be taken advantage ofby selfish nodes to cheat for more payoffs.
In order to combat the above vulnerability issues onautonomous MANETs under noisy and imperfect observa-tion, it is important to study novel strategy frameworkcomprehensively considering these issues.
4 A BELIEF EVALUATION FRAMEWORK
In this section, we first develop a belief evaluation frameworkfor two-player packet forwarding game in attempt to shed
JI ET AL.: A BELIEF EVALUATION FRAMEWORK IN AUTONOMOUS MANETS UNDER NOISY AND IMPERFECT OBSERVATION... 1245
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

light on the solutions to the more complicated multiplayercase. Efficiency study is then carried out to analyze theequilibrium properties and performance bounds. Further, abelief evaluation framework is proposed for general network-ing scenarios with multiple nodes and multihop routing.
4.1 Two-Player Belief-Based Packet Forwarding
In order to have an efficient and robust forwarding strategybased on each node’s own imperfect observation andactions, enlightened by [21], we propose a belief evaluationframework to enforce cooperation.
First, we define two strategies, i.e., �F and �D. Let �F bethe trigger cooperation strategy, which means that theplayer forwards packets at current stage, and at the nextstage, the player will continue to forward packets only if itobserves the other player’s forwarding signal f . Let �D bethe defection strategy, which means that the player alwaysdrops packets regardless of its observation history. Suchstrategies are also called continuation strategies [21]. Sinceboth of the two strategies also determine the player’sfollowing actions at every private history, the strategy pathand expected future payoffs caused by any pair of the twostrategies are fully specified. Let V�;�ðp; �Þ; �; � 2 fF;Dgdenote the repeated game payoff of �� against ��, whichcan be illustrated by the following Bellman equations [24]for different pairs of continuation strategies:
VFF ¼ ð1� �Þðg� ‘Þ þ ��ð1� pfÞ2VFF
þ pfð1� pfÞVFD þ pfð1� pfÞVDF þ p2f � VDD
�; ð3Þ
VFD ¼ �ð1� �Þ‘þ �ðð1� pfÞð1� peÞVDDþ pfð1� peÞVDD þ peð1� pfÞVFD þ pfpeVFDÞ; ð4Þ
VDF ¼ ð1� �Þgþ �ðð1� pfÞð1� peÞVDDþ peð1� pfÞVDF þ pfð1� peÞVDD þ pepfVDF Þ; ð5Þ
VDD ¼ ð1� �Þ � 0þ ��ð1� peÞ2VDDþ
peð1� peÞVDD þ peð1� peÞVDD þ p2e � VDD
�: ð6Þ
Generally speaking, a Bellman equation [24] breaks adynamic optimization problem into simpler subproblems,representing the payoff of a dynamic programmingproblem at a certain point in time in terms of the payofffrom some initial choices at this time point and the payoff ofthe future time period that results from those initial choices.Note that the first terms on the right-hand side (RHS) of (3)-(6) represent the normalized payoffs of current period withspecific initial choices of f�; �g, while the second termsillustrate the expected continuation payoffs consideringfour possible outcomes due to the noisy and imperfectobservation.
By solving the above equations, V�;�ðp; �Þ can be easilyobtained. Then, we have VDD > VFD, for any �; p. Further-more, if � > �0, then VFF > VDF , where �0 can be obtained as
�0 ¼‘
ð1� pf � peÞg� ½pfð1� pfÞ � pe�‘: ð7Þ
Intuitively, VFF needs to be greater than VDF so that thecooperative behaviors introduce greater overall payoff. Then,it is possible to enforce the cooperation behavior among theselfish users since VFF dominates VDF in the long run.Therefore, it is important to constrain � > �0 in our study.
Suppose that player i believes that his opponent isplaying either �F or �D, and is playing �F with probability�. Then, the difference between his payoff of playing �F andthe payoff of playing �D is given by
4V ð�; �; pÞ ¼ � � ðVFF � VDF Þ � ð1� �Þ � ðVDD � VFDÞ: ð8Þ
Hence, 4V ð�Þ is increasing and linear in � and there is aunique value �ðp; �Þ to make it zero, which can be obtainedas follows:
�ð�; pÞ ¼ �VFDð�; pÞVFF ð�; pÞ � VDF ð�; pÞ � VFDð�; pÞ
; ð9Þ
where �ðp; �Þ is defined so that there is no difference forplayer i to play �F or �D when player j plays �F withprobability �ð�; pÞ and �D with probability 1� �ð�; pÞ. Forsimplicity, �ð�; pÞ maybe denoted as � under the circum-stances with no confusion. In general, if node i holds thebelief that the other node will help him to forward the packetswith a probability smaller than 1=2, node i is inclined not toforward packets for the other node. Considering suchsituation, we let � be such that �ð�; pÞ > 1=2.
It is worth mentioning that (8) is applicable to any period.Thus, if a node’s belief of an opponent’s continuationstrategy being �F is �, in order to maximize its expectedcontinuation payoff, the node prefers �F to �D if � > � andprefers �D to �F if � < �. Starting with any initial belief �, theith player’s new belief when he takes action ai and receivessignal !i can be defined using Bayes’ rule [18] as follows:
��ht�1i ; ðF; fÞ
�¼ �ðht�1
i Þð1� pfÞ2
�ðht�1i Þð1� pfÞ þ pe � ð1� �ðht�1
i ÞÞ; ð10Þ
��ht�1i ; ðF; dÞ
�¼ �ðht�1
i Þð1� pfÞ � pf�ðht�1
i Þ � pf þ ð1� peÞ � ð1� �ðht�1i ÞÞ
; ð11Þ
��ht�1i ; ðD; fÞ
�¼ �ðht�1
i Þð1� pfÞ � pe�ðht�1
i Þ � ð1� pfÞ þ pe � ð1� �ðht�1i ÞÞ
; ð12Þ
��ht�1i ; ðD; dÞ
�¼ �ðht�1
i Þpf � pe�ðht�1
i Þ � pf þ ð1� peÞ � ð1� �ðht�1i ÞÞ
: ð13Þ
From on the above discussion, we propose a two-playerpacket forwarding algorithm based on the developed beliefevaluation framework in Table 1. Note that by using theproposed belief system, each node only needs to maintainits belief value, its most recent observation and actioninstead of the long-run history information of interactionswith other users.
1246 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
TABLE 1Two-Player Packet Forwarding Algorithm
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

4.2 Efficiency Analysis
In this part, we show that the behaviorial strategy obtainedfrom the proposed algorithm with well-defined beliefsystem is a sequential equilibrium [17] and further analyzeits performance bounds.
First, we briefly introduce the equilibrium concepts ofthe repeated games with imperfect information. As for theinfinitely repeated game with perfect information, the NashEquilibrium concept is a useful concept for analyzing thegame outcomes. Further, in the same scenario with perfectinformation, Subgame Perfect Equilibrium (SPE) [17] canbe used to study the game outcomes, which is anequilibrium such that users’ strategies constitute a Nashequilibrium in every subgame [18] of the original game,which eliminate those Nash Equilibria in which the players’threats are incredible. However, the above equilibriumcriteria for the infinitely repeated game require that perfectinformation can be obtained for each player. In our packetforwarding game, each node is only able to have its ownstrategy history and form the beliefs of other nodes’ futureactions through imperfect observation. Sequential Equili-brium [17] is a well-defined counterpart of subgame perfectequilibrium for multistage games with imperfect informa-tion, which has not only sequential rationality thatguarantees that any deviations will be unprofitable butalso consistency on zero-probability histories.
In our packet forwarding game with private history andobservation, the proposed strategy with belief system canbe denoted as ð��; �Þ, where � ¼ f�igi2I and �� ¼ f��i gi2I .By studying (10), we find that there exists a point such that �ðht�1
i ; ðF; fÞÞ < �ðht�1i Þ as �ðht�1
i Þ > while�ðht�1
i ; ðF; fÞÞ > �ðht�1i Þ as �ðht�1
i Þ < . Here, can becalculated as ¼ ½ð1� pfÞ2 � pe�=ð1� pf � peÞ. It is easy toshow that �ðht�1
i ; ðai; !iÞÞ < �ðht�1i Þ when ðF; dÞ; ðD; fÞ, and
ðD; dÞ are reached. Since we initialize the belief with � wehave �ti � after any belief-updating operation if � < .Considering the belief updating in the scenario that � � becomes trivial, we assume � < thus �ti 2 ½0; � and � 1=2. Then, let the proposed packet forwarding strategyprofile �� be defined as: ��i ð�iÞ ¼ �F if �i > � and ��i ð�iÞ ¼�D if �i < �; if �i ¼ �, the node forwards packets withprobability � and drops them with probability 1� �. Notingthat �ð�; pÞ � , we obtain another constraint on �, whichcan be written as follows:
� � � ¼ ‘
½ð1� pfÞ2 � pe� � gþ ‘ � pe: ð14Þ
Using the above equilibrium criteria for the repeated gameswith imperfect information, we then analyze the propertiesof the proposed strategy illustrated in Table 1 through thefollowing theorems.
Theorem 1. The proposed strategy profile �� with belief system �from Table 1 is a sequential equilibrium for � 2 ð1=2; Þ.
Proof. See the Appendix. tu
Theorem 1 shows that the strategy profile �� and thebelief system � obtained from the proposed algorithm is asequential equilibrium, which not only responds optimallyat every history but also has consistency on zero-probabilityhistories. Thus, the cooperation can be enforced using ourproposed algorithm since the deviation will not increase the
players’ payoffs. Then, similar to [21], it is straightforwardto prove the following theorem, which addresses theefficiency of the equilibrium and shows that when the peand pf are small enough, our proposed strategy approachesthe cooperative payoff g� ‘.Theorem 2. Given g and ‘, there exist ~� 2 ð0; 1Þ and ~p for any
small positive � such that the average payoff of the proposedstrategy �� in the packet forwarding repeated game Gðp; �Þ isgreater than g� ‘� � if � > ~� and pe; pf < ~p.
However, in real ad hoc networks, considering themobility of the node, channel fading, and the cheatingbehaviors of the nodes, it may be not practical to assumevery small pe and pf values. A more useful and importantmeasurement is the performance bounds of the proposedstrategy given some fixed pe and pf values. We furtherdevelop the following theorem studying the lower boundand upper bound of our strategy to provide a performanceguideline. In order to model the prevalent data applicationin current ad hoc networks, we assume the game discountfactor is very close to 1.
Theorem 3. Given the fixed ðpe; pfÞ and discount factor of therepeated game �G close to 1, the payoff of the proposedalgorithm in Table 1 is upper bounded by
�U ¼ ð1� Þ � ðg� ‘Þ; ð15Þ
where
¼ pf � ½gð1� pfÞ þ ‘�ð1� pf � peÞðg� ‘Þ
: ð16Þ
The lower bound of the performance will approach the upperbound when the discount factor of the repeated game �Gapproaches 1 and the packet forwarding game is divided intoN subgames as follows: the first subgame is played in period1; N þ 1; 2N þ 1; . . . and the second subgame is played inperiod 2; N þ 2; 2N þ 2; . . . , and so on. The optimal N is
N ¼ blog �= log �Gc; ð17Þ
The proposed strategy is played in each subgame withequivalent discount factor �NG .
Proof. By substituting V�;� obtained from (3)-(6) into (9),we have
�ð�; pÞ ¼ ‘
g� ‘ �1� �ð1� pfÞ2
�ð1� pf � peÞ: ð18Þ
Then, since the node i is indifferent of forwarding ordropping packets if its belief of the other node is equal to�, the expected payoff of the node i at the sequentialequilibrium ð��; �Þ can be written as
V ð�; �; pÞ ¼ �ð�; pÞ � VDF ð�; pÞ þ ð1� �ð�; pÞÞ � VDDð�; pÞ:ð19Þ
It is easy to show that V ð�ð�; pÞ; �; pÞ is a decreasingfunction in � when � 2 ð0; 1Þ. Then, the upper bound ofthe expected payoff can be obtained by letting � be thesmallest feasible value. From (7) and (14), we have � > �and � > �0. Since � > �0, we can derive the upper boundof the payoff of the proposed algorithm as (15) bysubstituting � into (19).
JI ET AL.: A BELIEF EVALUATION FRAMEWORK IN AUTONOMOUS MANETS UNDER NOISY AND IMPERFECT OBSERVATION... 1247
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

However, the discount factor of our game is usuallyclose to 1. Generally, � is a relatively smaller value in therange of ð0; 1Þ. In order to emulate the optimal discountfactor �, we introduce the following game partitionmethod. We partition the original repeated gameGðp; �GÞ into N distinct subgames as the theoremillustrates. Each subgame can be regarded as a repeatedgame with the discount factor �NG . The optimal subgamenumber N , which minimizes the gap between �NG and �,can be calculated as N ¼ blog �= log �Gc.
As there is always difference between �NG and �, it ismore important to study the maximal gap, which resultsin the lower bound of the payoff using our gamepartition method. Similar to [25], we can show that byusing the optimal N , �NG 2 ½�; ���, where �� ¼ �=�G. Sub-stituting �� into (19), we have the lower bound of thepayoff of our proposed algorithm with the proposedgame partition method. When �G approaches 1, and ��approaches �, the payoff of our algorithm achieves thepayoff upper bound. tu
In the above theorem, the idea of dividing the originalgame into some subgames is useful to maintain the efficiencywhen � approaches one for our game setting. A larger �indicates that future payoffs are more important for the totalpayoff, which results in more number of subgames. Sincethere are multiple subgames using the belief-based forward-ing strategy, even if the outcomes of some subgames becomethe noncooperation case due to the observation errors,cooperation plays can still continue in other subgames toincrease the total payoff. Therefore, compared to the triggerstrategy for ad hoc networks [26] in which a node stopscooperating with other nodes if one single defection isobserved, our approach is much more robust to the defectioncaused by noisy and imperfect observation with the abovesubgame partition approach. Also, our proposed beliefsystem takes into consideration of observation or link errors.
4.3 Multinode Multihop Packet Forwarding
In the previous parts, we mainly focus on the two-playercase, while in an ad hoc network there usually exist manynodes and multihop routing is generally enabled. In thissection, we model the interactions among selfish nodes inan autonomous ad hoc network as a multiplayer packetforwarding game, and develop the optimal belief evaluationframework based on the two-player belief system.
4.3.1 Multinode Multihop Game Model
In this section, we consider autonomous ad hoc networkswhere nodes can move freely inside a certain area. For eachnode, packets are scheduled to be generated and sent tocertain destinations. Different from the two-player packetforwarding game, the multiplayer packet forwarding gamestudies multihop packet forwarding which involves theinteractions and beliefs of all the nodes on the route. Beforestudying the belief-based packet forwarding in this scenar-io, we first model the multiplayer packet forwarding gameas follows:
. There are M players in the game, which representM nodes in the network. Denote the player set asIM ¼ f1; 2; . . . ;Mg.
. For each player i 2 IM , he has groups of packets tobe delivered to certain destinations. The payoff ofsuccessfully having a group of packets deliveredduring one stage is denoted by ~g.
. For each player i 2 IM , forwarding a group ofpackets for another player will incur the cost ‘.
. Due to the multihop nature of ad hoc networks, thedestination player may be not in the sender i’s directtransmission range. Player i needs to not only findthe possible routes leading to the destination (i.e.,route discovery), but also choose an optimal routefrom multiple routing candidates to help forwardingthe packets (i.e., route selection).
. Each player only knows his own past actions andimperfect observation of other players’ actions. Notethat the information history consisting of the abovetwo parts is private to each player.
Similar to [9], we assume the network operates in discretetime. In each time slot, one node is randomly selected fromthe M nodes as the sender. The probability that the senderfinds r possible routes is given by qrðrÞ and the probabilitythat each route needs �h hops is given by q�hð�hÞ (assume atleast one hop is required in each time slot). Note that the�h relays on each route are selected from the rest of nodeswith equal probability and �h � b~g=‘c. Assume each routingsession lasts for one slot and the routes remain unchangedwithin each time slot. In our study, we consider that delicatetraffic monitoring mechanisms, such as receipt-submissionapproaches [6], are in place, hence, the sender is able to havethe observation of each node on the forwarding route.
4.3.2 Belief Evaluation System Design
In this part, we develop an efficient belief evaluationframework for multihop packet forwarding games basedon the proposed two-player approach. Since a successfulpacket transmission through a multihop route depends onthe actions of all the nodes on the route, the belief evaluationsystem needs to consider the observation error caused byeach node, which makes a direct design of the belief systemfor the multiplayer case very difficult. However, the beliefsystem derived for two-player scenarios can serve as thebaseline of how to derive the beliefs in the scenarios ofmultihop and multinodes scenarios. Although there are morecomplicated interactions between nodes and among a groupof nodes while forming a multihop forwarding route, thebelief of each user are still based on the mutual interactionswith other nodes from his/her own observations.
Different from single-hop two-player packet forwardinggame, in the multihop multinode packet forwarding, thenodes on each route that are successfully formed can beconsidered as a coalition [17]. And, the cooperation within acoalition can only be enforced while the players followcertain common game rules. The game also becomes acompetition between coalitions of players, rather thanindividual nodes. Since we study the selfish nodes, propergame rules need to be introduced to maximize the payoff ofeach user and prevent the unilateral or multilateraldeviation from the game strategy depending on whatoptimization game criteria are applied. Considering thederived belief system for the two-player game leads to a
1248 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

sequential equilibrium, we apply it to multihop multinodepacket forwarding. In order to cope with more complicatedmultihop route forming and selection, multiple phases ofthe strategy are considered. It is worth mentioning that thebelief system plays an important role for all strategy phases.Let Rt
i denote the set of players on the forwarding route ofplayer i in tth period. Let �i;j denote the sender i’s beliefvalue of the node j on the route. The proposed forwardingstrategy for the multiplayer case is illustrated as follows:
Belief-based multihop packet forwarding (BMPF)strategy. In the multinode multihop packet forwardinggame, given the discount factor �G and p ¼ ðpe; pfÞ, thesender and relay nodes act as follows during differentphases of routing process:
. Game partition and belief initialization: Partition theoriginal game into N subgames according to (17).Then, each node initializes its belief of other nodesas �ð�NG ; pÞ and forwards packets with probability�ð�NG ; pÞ.
. Route participation: The selected relay node on eachroute participates in the routing if and only if itsbeliefs of the sender and other forwarding nodes aregreater than �.
. Route selection: The sender selects the route with thelargest �i ¼ �j2Ri
�ij with �ij > � from the routecandidates.
. Packet forwarding: The sender updates its belief ofeach relay node’s continuation strategy using (10)-(13)and decides the following actions based on its belief.
The above BMPF strategy in multihop multinode scenario isillustrated in Fig. 3, which shows the multihop coalitionsformed by multiple nodes. Note that the idle nodes are thenodes with low belief values observed from other nodes sothat they cannot participate on a routing candidate. Fig. 3also illustrates that each node maintains a list of beliefvalues of all the nodes that it have interactions with.
In the above strategy, the belief value of each node plays animportant role. The nodes who intentionally drop packetswill be gradually isolated by other nodes since the nodes whohave low belief value of the misbehaved nodes will notcooperate with them or participate in the possible routesinvolving these nodes. During the route participation stage,only the nodes with mutual beliefs that are greater than the
cooperation threshold can form a forwarding multihop route.Considering the belief value is defined as the probability of
forwarding, it can be directly used for the source node tochoose the optimal forwarding route from the routing
candidates. It is worth addressing that although the sourcenode is the beneficiary of gains of one transmission stage, the
relaying nodes gain the belief from others during thistransmission, which will be beneficial to themselves in the
future game stages when they need others to forward packetsfor them. Since the repeated game modeling is applied to
model packet forwarding in this paper, the total payoff ofeach node (source node or relay node) can be improved if it
participates in multihop packet forwarding following theBMPF strategy. Note that the equivalent two-player gain g
here is different from that in Table 1, which needs to furthercope with the error propagation and routing diversity
depending on the routing statistics, such as qrðrÞ and q�hð�hÞ.The roles of sender or relay nodes may change over time
depending on which source-destination pair has packets totransmit. As each node is selfish and trying to maximize its
own payoff, all nodes are inclined to follow the above strategyfor achieving the optimal payoff. In order to formally show
the optimality of the proposed BMPF strategy, we have thefollowing theorem:
Theorem 4. The packet forwarding strategy and belief evaluation
system specified by the BMPF Strategy lead to a sequential
equilibrium for the multiplayer packet forwarding game.
Proof. A sequential equilibrium for the game with imperfectinformation is not only sequential rational but also
consistent [17]. First, we prove the sequential rationalityof the proposed strategy using the one-step deviation
property [17], which indicates that ð�; �Þ is sequentiallyrational if and only if no player i has a history hi at which
a change in �iðhiÞ increases his expected payoff.In route participation stage, we assume each forward-
ing node j 2 Ri has built up a belief value of the sender ias �ji and the belief values of any other relay node k 2 Ri.One-step deviation property is considered for thefollowing three subcases for any forwarding node j:First, if �ji > � and �jk > �; k 6¼ j, a one-step deviation isnot to participate in the routing. In this case, theforwarding node will miss the opportunity of cooperat-ing with the sender, which has been shown to beprofitable for the forwarding node in (8). Second, if �ji <� and �jk > �; k 6¼ j, a one-step deviation is to participatein the routing. Since the relay node j will drop the packetfrom the sender i, the equivalent cooperation gain g inTable 1 will decrease due to packet-drop of theparticipated nodes, which also decreases the future gainof node j. Although node j does not afford the cost toforward packets for node i, its future gain will bedamaged due to a smaller g. Thus, one-step deviation isnot profitable in this subcase. Third, if �ji < � and thereexists node k such that �jk < �, the noncooperationforwarding behavior may happen since node j’s beliefof node k is lower than the threshold �. Such possiblenoncooperation outcome may decrease the expectedequivalent gain g, which results in future payoff loss as(15) shows. Therefore, in all of the above three subcases of
JI ET AL.: A BELIEF EVALUATION FRAMEWORK IN AUTONOMOUS MANETS UNDER NOISY AND IMPERFECT OBSERVATION... 1249
Fig. 3. Belief-based multihop multinode packet forwarding in autono-mous MANETs.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

the route participation stage, one-step deviation from theBMPF Strategy cannot increase the payoffs of the nodes.
In route selection stage, two subcases need to beconsidered for one-step deviation test. First, if the largest�i with �ij < �; 9j is selected as the forwarding route,there are noncooperation interactions between thesender i and relay j, which decreases the expectedequivalent gain g and then lower the future payoffs.Second, if not the route with largest �i is selected, theexpected gain g can still be increased by another route withlarger successful forwarding probability. Thus, one-stepdeviation is not profitable in the route selection stage.
Further, Theorem 1 can be directly applied here toprove the sequential rationality for every packet for-warding stage. To sum up, the BMPF Strategy issequential rational for the multinode multihop packetforwarding game. Besides, following the definition of theconsistency for sequential equilibria [17], it is straightfor-ward to prove it for our BMPF Strategy. Therefore, theproposed multiplayer packet forwarding strategy is asequential equilibrium. tu
Since the above theorem has proved that the BMPFStrategy is a sequential equilibrium, the cooperation amongthe nodes can be enforced and no selfish node will deviatefrom the equilibrium. As all nodes will follow the proposedstrategy to have optimal payoffs, the expected gain g inTable 1 can be written as follows:
g ¼ ~g � Er;�h½1� ½1� ð�ð1� pfÞÞ�h�r� � Eð�hÞ � �‘; ð20Þ
where Eð�hÞ is the expected number of hops and Er;�h
represents the expectation with respect to the randomvariables r and �h. The first term on the RHS of (20) is theexpected gain of the sender considering multiple hops andpossible routes; the second term on the RHS is the expectedforwarding cost of sender i for returning the forwardingfavor of the other relay nodes on its route. Note that � in (20)is also affected by g as shown in (18), which makes thecomputation of g more complicated. However, as we shownin Theorem 3, the optimal � approaches when � approaches�. Considering the situations when �G approaches 1, � can be
very close to as � is approached. Then, we can approximateg by substituting � with in (20), which is only determinedby pf and pe.
In addition, in this section, we mainly focus our study onhow to build an efficient and formalized belief system thatcan enforce cooperation in both single-hop and multihopad hoc networks. Our approach can be applied togetherwith well-studied trust evaluation and propagation modelsproposed in [13], [15], [16] to propagate and share ourdefined belief metrics to further enhance the cooperationlevel in MANETs.
5 SIMULATION
In this section, we investigate the cooperation enforcementresults of our proposed belief evaluation framework bysimulation.
We first focus our simulation studies on one-hop packetforwarding scenarios in ad hoc networks, where the two-player belief-based packet forwarding approach can bedirectly applied to. Let M ¼ 100, g ¼ 1, and ‘ ¼ 0:2 in oursimulation. In each time slot, any one of the nodes is pickedwith equal probability as the relay node for the sender. Forcomparison, we define the cooperative strategy, in which weassume every node will unconditionally forward packetswith no regard to other nodes’ past behaviors. Suchcooperative strategy is not implementable in autonomousad hoc networks. But it can serve as a loose performanceupper bound of the proposed strategy to measure theperformance loss due to noisy and imperfect observation.
Fig. 4 shows the average payoff and performance boundsof the proposed strategy based on our belief evaluationframework for different pf by comparing them with thecooperative payoff. Note that pe ¼ 0:01 and �G ¼ 0:99. It canbe seen from Fig. 4 that our proposed approach can enforcecooperation with only small performance loss compared tothe unconditionally cooperative payoff. Further, this figureshows that the average payoff of our proposed strategysatisfies the theoretical payoff bounds developed in Theo-rem 3. The fluctuation of the payoff curve of our strategy isbecause only integer number of subgames can be partitionedinto from the original game. Fig. 5 shows the ratio of the
1250 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
Fig. 4. The average payoffs of the cooperative strategy and proposedstrategy.
Fig. 5. Payoff ratios of the proposed strategy to the cooperative strategy.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

payoffs of our strategy to those of the cooperative strategyfor different pe and pf . Here, we let �G ¼ 0:999 to approachthe payoff upper bound. It can be seen from Fig. 5 that evenif pf is as large as 0.1 due to link breakage or transmissionerrors, our cooperation enforcement strategy can stillachieve as high as 80 percent of the cooperative payoff.
In order to show that the proposed strategy is cheat-proofamong selfish users, we define the deviation strategies forcomparison. The deviation strategies differ from theproposed strategy only when the continuation strategy �Fand observation F are reached. The deviation strategies willplay �D with some deviating probability pd instead ofplaying �F as the proposed belief evaluation framework.Fig. 6 compares the nodes’ average payoffs of the proposedstrategy, cooperative strategy, and deviation strategies withdifferent deviating probabilities. Note that �G ¼ 0:999 andpe ¼ 0:1. This figure shows that the proposed strategy hasmuch better payoffs than the deviating strategies.
Then, we study the performance of the proposed multi-hop multinode packet forwarding approach. Before evalu-ating the performance of our proposed strategy, we firstneed to obtain the routing statistics, such as qrðrÞ and q�hð�hÞ.An autonomous ad hoc network is simulated withM nodesrandomly deployed inside a rectangular region of 10� � 10�according to the 2-dimensional uniform distribution. Themaximal transmission range is � ¼ 100 m for each node, andeach node moves according to the random waypoint model[27]. Let the “thinking time” of the model be the timeduration of each routing stage. Dynamic Source Routing(DSR) [27] is used as the underlying routing to discoverpossible routes. Let � ¼M�=100 denote the normalizednode density, i.e., the average number of neighbors for eachnode in the network. Note that each source-destination pairis formed by randomly picking two nodes in the network.Moreover, multiple routes with different number of hopsmay exist for each source-destination pair. Since the routeswith the minimum number of hops achieve the lowest costs,without loss of generality, we only consider the minimum-hop routes as the routing candidates.
In order to study the routing statistics, we first conductsimulations to study the hop number on the minimum-hop
route for source-destination pairs. Let hminðni; njÞ ¼ddistðni; njÞ=�e denote the ideal minimum number of hopsneeded to traverse from node i to node j, where distðni; njÞdenotes the physical distance between node i and j, and let~�hðni; njÞ denote the number of hops on the actual mini-mum-hop route between the two nodes. Note that wesimulate 106 samples of topologies to study the dynamics ofthe routing in ad hoc networks. First, Fig. 7 shows theapproximated cumulative probability mass function (CMF)of the difference between the ~�hðni; njÞ and hminðni; njÞ fordifferent node densities. Based on these results, the averagenumber of hops associated to the minimum-hop route fromnode i to j can be approximated using the distðni; njÞ, �, andthe corresponding CMF of hop difference, which also givesthe statistics of q�hð�hÞ. Besides, it can be seen from Fig. 7 thatlower node density results in having a larger number ofhops for the minimum-hop routes, since the neighbor nodesare limited for packet forwarding in such scenarios. Second,we study the path diversity of the ad hoc networks byfinding the maximum number of minimum-hop routes forthe source-destination pair. Note that there may exist thescenarios where the node may be on multiple minimum-hop forwarding routes for the same source-destination pair.For simplicity, we assume during the route discoveryphase, the destination randomly picks one of such routesas the routing candidate and feeds back the routinginformation of all node-disjoint minimum-hop routes tothe source. Fig. 8 shows the CMF of the number of theminimum-hop routes for different hop number when thenode density is 30. This figure actually shows the qrðrÞstatistics when the ideal minimum-hop number is given.Based on the routing statistics given in Figs. 7 and 8, we areable to obtain the expected equivalent two-player payofftable for multinode and multihop packet forwardingscenarios using (20).
We compare the payoff of our approach with that of thecooperative one in Fig. 9. Note that multihop forwardingwill incur more costs to the nodes since one successfulpacket delivery involves the packet forwarding efforts ofmany relay nodes. Also, the noisy and imperfect observa-tion will have more impact on the performance as each
JI ET AL.: A BELIEF EVALUATION FRAMEWORK IN AUTONOMOUS MANETS UNDER NOISY AND IMPERFECT OBSERVATION... 1251
Fig. 6. Payoff comparison of the proposed strategy and deviatingstrategies.
Fig. 7. The cumulative probability mass function of the hop-numberdifference between the ~�hðni; njÞ and hminðni; njÞ.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

node’s incorrect observation will affect the payoffs of allother nodes on the selected route. We can see from Fig. 9that our proposed strategy maintains high payoffs evenwhen the environment is noisy and the observation error islarge. For instance, when pe ¼ 0:2 and pf ¼ 0:1, ourproposed strategy still achieves over 70 percent payoffs ofthe unconditionally cooperative payoff.
6 CONCLUSION
In this paper, we exploited how to enforce cooperation inautonomous ad hoc networks under noisy and imperfectobservation. The vulnerability analysis is carried out tounderstand the challenges of achieving cooperation en-forcement in the scenarios with noisy and local/imperfectobservation. In our approach, by modeling the packetforwarding as a repeated game with imperfect information,we develop the belief evaluation framework for packetforwarding to enforce cooperation in the scenarios withnoisy and imperfect observation. It is shown in this paperthat the behaviorial strategy with well-defined belief systemin our proposed approach can not only achieve thesequential equilibrium for the repeated games, but alsohave high payoffs. We develop and analyze the belief-basedstrategy for both the two-node scenario and multinodemultihop networking scenarios with only each node’saction history and imperfect private observation requiredfor the proposed strategy. The simulation results illustratethat the proposed belief evaluation framework achievesstable and near-optimal equilibria in ad hoc networks undernoisy and imperfect observation.
APPENDIX
Proof of Theorem 1. First, we prove the sequentialrationality of the solution obtained by our algorithm. Itis already shown in [17] that ð�; �Þ is sequentiallyrational if and only if no player i has a history at whicha change in �iðhiÞ increases his expected payoff. This isalso called the one-step deviation property for sequentialequilibrium, which we use in our proof to show thesequential rational property of the proposed solution. tu
There are three possible outcomes considering therelation between � and �.
1. If �iðht�1i Þ > �, a one-step deviation from �� is to drop
packets in current period and continue with �� in thenext period. Since the action player i chooses isD, theoperators (12) and (13) need to be considered forupdating beliefs. Noting that �iðht�1
i ; ðD; fÞÞ is anincreasing function with respect to �ðht�1
i Þ and�ðht�1
i Þ � 1, we can obtain that �iðht�1i ; ðD; fÞÞ < pe.
Since � > 1=2 and pe < 1=2, we have the continuationbelief satisfying �iðht�1
i ; ðD; fÞÞ < �. Then, only thefollowing two subcases need to be considered:
a. Suppose �iðht�1i ; ðD; dÞÞ � �. In this case, since
�iðht�1i ; ðD; dÞÞ � � and �iðht�1
i ; ðD; fÞÞ � �, theone-step deviation results in the continuationstrategy �D. Considering the node’s currentaction D, the deviated node will play �D in thissubcase. But, (8) shows that the rational nodeprefers �F than �D when �iðht�1
i Þ > �. Then, aone-step deviation here cannot increase thepayoff of the node.
b. Suppose �iðht�1i ; ðD; dÞÞ > �. The one-step devia-
tion is to drop packets in current period andcontinue with �D if the history information setðD; fÞ is reached or continue with �F if ðD; dÞ isreached. Compared with the first subcase, wefind that the one-step deviation differs from �Donly when the information set ðD; dÞ is reached.Let 4V̂ ð�Þ be the payoff difference between theproposed solution and the one-step deviation,which can be written as
4V̂ið�t�1i Þ ¼ 4Við�t�1
i Þ � �½�t�1i � pf
þ ð1� peÞ � ð1� �t�1i Þ� � 4Við�ðht�1
i ; ðD; dÞÞÞ;ð21Þ
where the first term on the RHS is the payoffdifference between �F and �D, and the secondterm on the RHS is the conditional payoffdifference when ðD; dÞ is reached. Noting that(13) indicates �iðht�1
i ; ðD; dÞÞ < �iðht�1i Þ and
1252 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
Fig. 8. The cumulative probability mass function of the number theminimum-hop route when the node density is 30.
Fig. 9. Average payoffs of the proposed strategy in multinode multihopscenarios.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

4V ð�Þ is an increasing function in �. we have4Við�iðht�1
i ÞÞ > 4Við�iðht�1i ; ðD; dÞÞÞ. Moreover,
as the coefficient of the second term in (21) isless than one, 4V̂ið�iðht�1
i ÞÞ is strictly greaterthan zero. Thus, the one-step deviation is notprofitable in this subcase.
Since there is no subcases other than the above
ones, we show that if �iðht�1i Þ > �, the one-step
deviation cannot increase the payoff for the node.
2. If �iðht�1i Þ < �, a one-step deviation from �� is to
forward packets in current period and continue
with �� in the next period. Considering � < and
�iðht�1i ; ðF; dÞÞ is an increasing function in �iðht�1
i Þ,we can show that �iðht�1
i ; ðF; dÞÞ < 1=2 if �iðht�1i Þ < �,
thus�iðht�1i ; ðF; dÞÞ < �. Then, there are two subcases:
a. If �iðht�1i ; ðF; fÞÞ � �, the one-step deviation
from �� becomes playing the cooperation strat-egy �F . As we have shown in (8), �D ispreferable to �F if �iðht�1
i Þ < �.b. If �iðht�1
i ; ðF; fÞÞ < �, the deviated strategydiffers from �F only when the private historyðF; fÞ is reached. Let 4 ~V ð�iðht�1
i ÞÞ be the payoffdifference between the equilibrium strategy �Dand the one-step deviation strategy, which canbe obtained as
4 ~V ð�iðht�1i ÞÞ ¼ 4V ð�iðht�1
i ÞÞ � �½�iðht�1i Þð1� pfÞ
þ pe � ð1� �iðht�1i ÞÞ� � 4V ð�iðht�1
i Þ; ðF; fÞÞ:ð22Þ
Note that 4V ð�iðht�1i ÞÞ < 4V ð�iðht�1
i Þ; ðF; fÞÞconsidering �iðht�1
i ; ðF; fÞÞ > �iðht�1i Þ. As the
coefficient of the second term on the RHS in
(22) is less than one, we have a positive
4 ~V ð�iðht�1i ÞÞ, which shows that the one-step
deviation in this subcase cannot increase payoff.
3. If �iðht�1i Þ ¼ � the node is indifferent between
forwarding packets and dropping packets from (8).Obviously, a one-step deviation will not change theexpected payoff.
By studying the above three cases, we prove that the
proposed strategy ð��; �Þ of the packet forwarding game is
sequential rational when � 2 ð1=2; Þ.Then, we prove the consistency of the proposed strategy.
Since the proposed strategy is a pure strategy when�i 6¼ �we
construct a completely mixed strategy ð� i; � iÞ, which is
constructed by allowing a tremble with a small probability
from purely forwarding strategy or dropping strategy. By
applying (10)-(13) to calculate the belief-update system with
tremble, it is easy to show that � i converges to �i when
approaches zero. Therefore, given a sequence � ¼ ð nÞ1n¼1
satisfying limn!1 n ¼ 0, we can show that the sequence
ð� ni ; � ni Þ1n¼1 of strategies with completely mixed strategies
converges to the proposed strategy ð��; �Þ while the belief
system being updated by Bayes’ rule.Therefore, since the proposed strategy satisfies the
sequential rationality and consistency properties when
� 2 ð1=2; Þ, it is a sequential equilibrium for the packetforwarding game with imperfect private observation.
ACKNOWLEDGMENTS
This paper has been presented in part at the IEEE Conference
on Sensor, Mesh and Ad Hoc Communications and Networks
(SECON), Virginia, September 2006.
REFERENCES
[1] C. Perkins, Ad Hoc Networking. Addison-Wesley, 2000.[2] C.K. Toh, Ad Hoc Mobile Wireless Networks: Protocols and Systems.
Prentice Hall PTR, 2001.[3] S. Marti, T.J. Giuli, K. Lai, and M. Baker, “Mitigating Routing
Misbehavior in Mobile Ad Hoc Networks” Proc. ACM MobiCom,pp. 255-265, Aug. 2000.
[4] P. Michiardi and R. Molva, “CORE: A Collaborative ReputationMechanism to Enforce Node Cooperation in Mobile Ad HocNetworks,” Proc. IFIP TC6/TC11 Sixth Joint Working Conf. Comm.and Multimedia Security, 2002.
[5] S. Buchegger and J.-Y.L. Boudec, “Performance Analysis of theCONFIDANT Protocol,” Proc. ACM MobiHoc, pp. 226-236,2002.
[6] S. Zhong, J. Chen, and Y.R. Yang, “Sprite: A Simple, Cheat-Proof,Credit-Based System for Mobile Ad-Hoc Networks,” Proc. IEEEINFOCOM, 2003.
[7] W. Yu and K.J.R. Liu, “Attack-Resistant Cooperation Stimulationin Autonomous Ad Hoc Networks,” IEEE J. Selected Areas inComm., special issue in autonomic comm. systems, vol. 23, no. 12,pp. 2260-2271, Dec. 2005.
[8] Z. Ji, W. Yu, and K.J.R. Liu, “An Optimal Dynamic PricingFramework for Autonomous Mobile Ad Hoc Networks,” Proc.IEEE INFOCOM, 2006.
[9] V. Srinivasan, P. Nuggehalli, C.F. Chiasserini, and R.R. Rao,“Cooperation in Wireless Ad Hoc Networks,” Proc. IEEEINFOCOM, 2003.
[10] Z. Ji, W. Yu, and K.J.R. Liu, “Cooperation Enforcement inAutonomous MANETs under Noise and Imperfect Observation,”Proc. Third Ann. IEEE Comm. Soc. Conf. Sensor, Mesh and Ad HocComm. and Networks (SECON ’06), 2006.
[11] P. Michiardi and R. Molva, “A Game Theoretical Approach toEvaluate Cooperation Enforcement Mechanisms in MobileAd Hoc Networks,” Proc. IEEE/ACM Modeling and Optimizationin Mobile, Ad Hoc and Wireless Networks (WiOPT ’03) 2003.
[12] E. Altman, A.A. Kherani, P. Michiardi, and R. Molva, “Non-Cooperative Forwarding in Ad-Hoc Networks,” Proc. 15th IEEEInt’l Symp. Personal, Indoor and Mobile Radio Comm. (PIMRC ’04),2004.
[13] S. Ganeriwal and M.B. Srivastava, “Reputation-Based Frameworkfor High Integrity Sensor Networks,” Proc. Second ACM WorkshopSecurity of Ad Hoc and Sensor Networks (SASN ’04), Oct. 2004.
[14] F. Li and J. Wu, “Mobility Reduces Uncertainty in MANETs,”Proc. IEEE INFOCOM, May 2007.
[15] Y. Sun, W. Yu, Z. Han, and K.J.R. Liu, “Information TheoreticFramework of Trust Modeling and Evaluation for Ad HocNetworks,” IEEE J. Selected Areas in Comm., special issue onsecurity in wireless ad hoc networks, vol. 24, no. 2, pp. 305-317,Feb. 2006.
[16] Y. Sun, Z. Han, W. Yu, and K.J.R. Liu, “A Trust EvaluationFramework in Distributed Networks: Vulnerability Analysis andDefense Against Attacks,” Proc. IEEE INFOCOM, 2006.
[17] M.J. Osborne and A. Rubinstein, A Course in Game Theory. MITPress, 1994.
[18] D. Fudenberg and J. Tirole, Game Theory. MIT Press, 1991.[19] D. Abreu, P. Milgrom, and D. Pearce, “Toward a Theory of
Discounted Repeated Games with Imperfect Monitoring,” Econ-ometrica, vol. 58, pp. 1041-1063, 1990.
[20] T. Sekiguchi, “Efficiency in Repeated Prisoner’s Dilemma withPrivate Monitoring,” J. Economic Theory, vol. 76, pp. 345-361,1997.
[21] V. Bhaskar and I. Obara, “Belief-Based Equilibria in the RepeatedPrisoners’ Dilemma with Private Monitoring,” J. Economic Theory,vol. 102, pp. 40-69, 2002.
[22] R.M. Axelrod, The Evolution of Cooperation. Basic Books 1984.
JI ET AL.: A BELIEF EVALUATION FRAMEWORK IN AUTONOMOUS MANETS UNDER NOISY AND IMPERFECT OBSERVATION... 1253
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.

[23] J.J. Jaramillo and R. Srikant, “DARWIN: Distributed and AdaptiveReputation Mechanism for Wireless Ad Hoc Networks,” Proc.ACM MobiCom, 2007.
[24] D. Bertsekas, Dynamic Programming and Optimal Control, seconded., vols. 1 and 2. Athena Scientific, 2001.
[25] G. Ellison, “Cooperation in the Prisoner’s Dilemma with Anon-ymous Random Matching,” Rev. of Economic Studies, vol. 61,pp. 567-588, 1994.
[26] L.A. DaSilva and V. Srivastava, “Node Participation in Peer-to-Peer and Ad Hoc Networks: A Game Theoretic Formulation,”Proc. Games and Emergent Behavior in Distributed ComputationWorkshop, Sept. 2004.
[27] D.B. Johnson and D.A. Maltz, “Dynamic Source Routing inAd Hoc Wireless Networks,” Mobile Computing, pp. 153-181,Kluwer Academic, 2000.
Zhu Ji received the BS and MS degrees inelectronic engineering from Tsinghua University,Beijing, China, in 2000 and 2003, respectively,and the PhD degree in electrical and computerengineering from the University of Maryland,College Park in May 2007. He is currently withQualcomm, San Diego, California. From 2003 to2007, he was a graduate research assistant inthe Communication and Signal ProcessingLaboratory, University of Maryland, College
Park. From 2000 to 2002, he was a visiting student (research intern)in the Wireless and Networking Group at Microsoft Research Asia,Beijing, China. His research interests are in wireless communicationsand networking.
Wei Yu received the BS degree in computerscience from the University of Science andTechnology of China (USTC), Hefei, in 2000,the MS degree in computer science fromWashington University, St. Louis, Missouri, in2002, and the PhD degree in electrical engineer-ing from the University of Maryland, CollegePark, in 2006. From 2000 to 2002, he was agraduate research assistant at WashingtonUniversity. From 2002 to 2006, he was a
graduate research assistant with the Communications and SignalProcessing Laboratory and the Institute for Systems Research,University of Maryland. He joined Microsoft Corporation, Redmond,Washington, in 2006. His research interests include network security,wireless communications and networking, game theory, wireless multi-media, handwriting recognition, and pattern recognition.
K.J. Ray Liu is a distinguished scholar-teacherof the University of Maryland, College Park. Heis associate chair of Graduate Studies andResearch of Electrical and Computer Engineer-ing Department and leads the Maryland Signalsand Information Group conducting researchencompassing broad aspects of informationscience and technology including wireless com-munications and networking, information foren-sics and security, multimedia signal processing,
and biomedical engineering. He is the recipient of numerous honors andawards, including best paper awards from the IEEE and EURASIP, thetitle of IEEE Signal Processing Society Distinguished Lecturer, theEURASIP Meritorious Service Award, and the US National ScienceFoundation Young Investigator Award. He also received variousteaching and research recognitions from the University of Maryland,including the university-level Invention of the Year Award, and the Pooleand Kent Senior Faculty Teaching Award and Outstanding FacultyResearch Award, both from A. James Clark School of Engineering. Heis a fellow of the IEEE and the AAAS. He is president-elect and wasvice president—publications of the IEEE Signal Processing Society. Hewas the editor-in-chief of the IEEE Signal Processing magazine and thefounding editor-in-chief of the EURASIP Journal on Applied SignalProcessing. His recent books include Cognitive Radio Networking andSecurity: A Game Theoretical View (Cambridge University, 2010),Cooperative Communications and Networking (Cambridge University,2008), Resource Allocation for Wireless Networks: Basics, Techniques,and Applications (Cambridge University, 2008), Ultra-Wideband Com-munication Systems: The Multiband OFDM Approach (IEEE-Wiley,2007), Network-Aware Security for Group Communications (Springer,2007), Multimedia Fingerprinting Forensics for Traitor Tracing (Hindawi,2005), and Handbook on Array Processing and Sensor Networks(IEEE-Wiley, 2009).
. For more information on this or any other computing topic,please visit our Digital Library at www.computer.org/publications/dlib.
1254 IEEE TRANSACTIONS ON MOBILE COMPUTING, VOL. 9, NO. 9, SEPTEMBER 2010
Authorized licensed use limited to: University of Maryland College Park. Downloaded on July 31,2010 at 15:54:48 UTC from IEEE Xplore. Restrictions apply.