Embed Size (px)
Citation preview

Gautam, Yuan, Lee, Li 1
LOCAL CALIBRATION OF THE MEPDG RUTTING MODELS FOR ONTARIO’S 1
FLEXIBLE ROADS: RECENT FINDINGS 2
3
Gyan Prasad Gautam 4 Department of Civil Engineering, Ryerson University 5
350 Victoria Street, Toronto, ON, Canada 6
E-mail: [email protected] 7
8
Xian-Xun Yuan, Correspondence Author 9 Department of Civil Engineering & Ryerson Institute for Infrastructure Innovation, 10
Ryerson University 11
350 Victoria Street, Toronto, ON, Canada 12
E-mail: [email protected] 13
14
Warren Lee 15 Pavement and Foundation Section, Ministry of Transportation of Ontario, 16
1201 Wilson Avenue, Toronto, ON, Canada 17
E-mail: [email protected] 18
Ningyuan Li 19 Pavement and Foundation Section, Ministry of Transportation of Ontario, 20
1201 Wilson Avenue, Toronto, ON, Canada 21
E-mail: [email protected] 22
23
Word Count: 6210 + 1250 (5 figures) = 7460 24
Submission Date: August 1, 2015 25
Revised: October 10, 2015 26

Gautam, Yuan, Lee, Li 2
ABSTRACT 27
This paper summarizes the recent efforts for and major findings from local calibration of 28
the rutting models of the AASHTO mechanistic-empirical pavement design guide (MEPDG) 29
for Ontario’s practices in pavement design, construction and maintenance. Unlike many other 30
local calibration studies for rutting models, this study took a new calibration method built upon 31
the more recent rutting calibration results from NCHRP Project 9-30A. To reduce the 32
indeterminacy because of the unknown layer contributions of total rutting, two of the five local 33
calibration factors (the temperature and traffic exponents) were prefixed based upon statistical 34
analysis of the data obtained from Project 9-30A. The remaining three scale factors were 35
determined by using a two-objective optimization strategy that eliminates bias and reduces 36
residual errors. It was concluded that although the Superpave and Marshall-mixes share the 37
same set of traffic and temperature exponents, the scale factors are very different. A set of local 38
calibration factors were recommended for future flexible pavement design in Ontario. 39
40
Key Words: Mechanistic-empirical method; Local calibration; Rutting model; Multi-objective 41
optimization; Efficiency frontier 42

Gautam, Yuan, Lee, Li 3
INTRODUCTION 43
Developed under multiple NCHRP projects including 1-37A[1], 1-40[2] and 9-30A [3] over 44
the past 15 years, the AASHTO Mechanistic-Empirical Pavement Design Guide (MEPDG) is 45
emerging as a mainstream pavement design method throughout North America. The method 46
established a direct tie between pavement distresses and various design inputs including 47
material properties, pavement structures, traffic loadings, climate, soil conditions, construction 48
quality, and so on. The design method has been packaged in a user-friendly working platform 49
now called the AASHTOWare Pavement ME software (originally DARWin-ME). As one of 50
the leading transportation agencies in Canada, the Ministry of Transportation of Ontario (MTO) 51
has been mandated to implement the MEPDG for future pavement design. 52
Preliminary studies for Ontario’s conditions have shown that the global (or default) 53
distress models in the MEPDG do not accurately predict the pavement distresses and 54
performance for Ontario roads. Rutting has been found to be drastically over-predicted, 55
whereas fatigue cracking is often under-predicted [4]. Three research projects have been 56
commissioned since 2010 under the support of the MTO Highway Infrastructure Innovation 57
Funding Program (HIIFP) to carry out a comprehensive local calibration study using the 58
pavement performance data from the MTO’s second-generation pavement management system 59
(PMS-2). The first HIIFP project focused on the development of a local calibration database 60
that included a number of typical pavement sections with accurate design input data as well as 61
high-quality performance and distress data. The second project was tasked mainly to perform 62
local calibration for the rutting models. The third project continued on the local calibration for 63
the cracking models and international roughness index (IRI) model by using more accurate 64
performance data collected by the new ARAN9000 system [5]. The challenges faced in the 65
database development were discussed in [6] and [7]. Some preliminary local calibration results 66
for the rutting models were reported in [8-10]. This paper presents major results from the more 67
recent rutting model calibration by the research team. 68
Two major results are reported in this paper. First, the local calibration was expanded to 69
cover pavement sections of Superpave mix. A major limitation of our previous local calibration 70
study was that it included only Marshall-type asphalt concrete (AC) mixes, which were called 71
Hot Laid or HL materials in Ontario, whereas Superpave AC has been widely used in Ontario 72
since the early 2000s. The Superpave mix is known to have much better rutting resistance than 73
Marshall mixes. From a design analysis point of view, however, the question is whether the 74
mechanistic part of the MEPDG (e.g., through the dynamic modulus model) fully captures the 75
difference of the two materials? In the context of local calibration, the question is rephrased as 76
follows: Do we need a separate set of local calibration parameters for the two materials? 77

Gautam, Yuan, Lee, Li 4
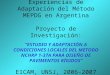
FIGURE 1 illustrates four example rutting growth curves of four neighboring pavement 78
sections of Highway 403, a freeway in central Ontario. All four pavement sections have very 79
similar structural design, traffic loading and environmental and climatic conditions, except that 80
the top two sections (1189 & 1200) in FIGURE 1 are Marshall-mix design whereas the bottom 81
two (1240 & 1255) employed Superpave design. As shown in the figure, at the same pavement 82
age of six years, the rut depth in the two Superpave sections is less than one third of those in 83
the two Marshall sections. Moreover, the two Superpave sections show fairly good replication 84
in rutting and thus small residual error in the calibrated model is expected. With identical design 85
and under the very similar working conditions, however, the two Marshall sections disclose 86
relatively large variability in rutting. It was therefore speculated whether the MEPDG rutting 87
models would be able to capture these differences between the two types of asphalt materials. 88
89
FIGURE 1: Comparison of total rutting curves: Superpave versus Marshall sections. 90
The second major result of the study, which is more important for readers outside of 91
Ontario, is the improvement of the local calibration method. The rutting model in the MEPDG 92
contains three empirically determined transfer functions. Due to the lack of information for the 93
layer contribution to total rutting, the local calibration is challenged by the indeterminacy and 94
multiple local optima, as reported in [10]. This paper reports a new local calibration method 95
based on the findings from the third party’s recalibration work for NCHRP Project 9-30A. The 96
proposed method is featured by two key points: 1) the determination of traffic and temperature 97
factors of the AC model, and 2) the trade-off between minimization of residual sum of squares 98
(RSS) and elimination of bias. The proposed local calibration method is mathematically 99
rigorous and engineering sound. 100
The rest of the paper is organized as follows. The background of the MEPDG rutting 101
models is first presented and followed by a methodological review of the global and local 102
calibration. The subsequent two sections discuss the proposed local calibration method. The 103
0
2
4
6
8
10
12
0 2 4 6 8
Tota
l ru
t d
ep
th (
mm
)
Pavement age (years)
Marshall
SC1200
SC1189
SuperpaveSC1240
SC1255

Gautam, Yuan, Lee, Li 5
proposed method is then applied to the local calibration for Ontario’s Superpave and Marshall-104
mix roads. The calibration database and results are discussed. Finally, conclusions are drawn 105
in the end. 106
RUTTING MODELS IN MEPDG 107
Background 108
The MEPDG relates rut depth to the vertical permanent deformation of different structural 109
layers. The mechanistic analysis starts with first calculating the resilient strain in each analysis 110
layer based on elastic layer theory. After the resilient strains are obtained, the plastic strain of 111
each analysis layer is then calculated by using one of the three empirical rutting models, 112
depending upon which material is used in the analysis layer. Since the three rutting models all 113
were established based on laboratory experiments, they are subject to further calibrations. 114
The AC rutting model is expressed as 115
𝜀𝑝,𝐴𝐶,𝑖
𝜀𝑟,𝐴𝐶,𝑖= 𝑘𝑧𝛽𝐴𝐶10−3.3541𝑇𝑖
1.5606𝛽𝑇𝑁0.4791𝛽𝑁 (1)
where 𝜀𝑟,𝐴𝐶,𝑖 denotes the resilient strain of AC at the mid-depth of the 𝑖𝑡ℎ analysis layer under 116
a specific traffic load; 𝜀𝑝,𝐴𝐶,𝑖 the corresponding accumulated plastic strain; 𝑘𝑧 the depth 117
confinement factor as a function of total asphalt layer thickness and depth to computational 118
point; 𝑇𝑖 the temperature at the 𝑖𝑡ℎ analysis layer in Fahrenheit degree; 𝑁 the number of load 119
repetitions; and finally 𝛽𝐴𝐶 , 𝛽𝑇 , 𝛽𝑁 represent the local calibration factors, which equal 1.0 by 120
default. Note that 𝛽𝐴𝐶 is also called AC-scale factor, and 𝛽𝑇 and 𝛽𝑁 are called temperature and 121
traffic exponents, respectively. 122
The rutting models for the unbound granular materials and fine-grained soil have the same 123
functional structure except for a different scale factor. The notations used in the MEPDG 124
documents for these two rutting models are very complicated and confusing. For the sake of 125
local calibration, the transfer function can be rearranged and expressed as the following: 126
𝜀𝑝,𝑖
𝜀𝑟,𝑖= 𝑘𝑠𝛽𝜙(𝑁, 𝛼) (2)
where 𝑘𝑠 represents the global calibration coefficient, which equals 1.673 for granular 127
materials (note that this 𝑘𝑠 is changed to 2.03 in the new 2015 MEPDG Manual of Practice and 128
this study does not reflect this new change) and 1.35 for fine-grained materials; and 𝛽 is the 129
local calibration factor and in this paper, we use 𝛽𝐺𝐵 and 𝛽𝑆𝐺 for the granular and fine-grained 130
materials, respectively, to differentiate the two models. The function 𝜙(𝑁, 𝛼), expressed as 131

Gautam, Yuan, Lee, Li 6
𝜙(𝑁, 𝛼) = 0.075 exp (4.89285 ×1 − 𝑁−𝛼
1 − 10−9𝛼) + 10 exp (−4.89285 ×
𝑁−𝛼 − 10−9𝛼
1 − 10−9𝛼) (3)
lumps the effect of repetitive traffic loading and soil moisture. In Eq. (2) and (3), 𝛼 is a 132
transformed parameter describing moisture content (𝑊𝑐) in the soil and is evaluated from the 133
relationship expressed as log 𝛼 = −0.61119 − 0.017638𝑊𝑐. 134
Note that the calculation of the plastic strains in the AC layers also involves a so-called 135
‘strain-hardening procedure’, for details of which refer to [1]. Once the plastic strains are 136
obtained, the total rut depth at age 𝑡, denoted by 𝐷(𝑡), is then calculated from the following 137
summation expression: 138
𝐷(𝑡) = ∑ 𝜀𝑝,𝑖(𝑡) ℎ𝑖
𝑀
𝑖=1
(4)
where ℎ𝑖 is the thickness of the analysis layer, and 𝑀 the total number of analysis layers. The 139
above summation process is repeated for each traffic loading level, sub-season, and month of 140
the analysis period. For the detailed analysis procedure used to predict permanent deformation 141
for flexible pavements, refer to [1]. 142
Therefore, the MEPDG contains three rutting models, one for each type of pavement 143
material (AC, granular material, and subgrade soil). In total there are five calibration 144
coefficients that are subject to adjustment during local calibration: three in the HMA model 145
(𝛽𝐴𝐶 , 𝛽𝑇 , 𝛽𝑁), one in the unbound granular materials (𝛽𝐺𝐵), and one in the fine-grained materials 146
(𝛽𝑆𝐺 ). Note that 𝛽𝐴𝐶1, 𝛽𝐺𝐵, 𝛽𝑆𝐺 serve as a scaling factor that changes proportionally the 147
permanent deformation in each layer along the whole life. In contrast, 𝛽𝑁 is an exponent 148
parameter associated with 𝑁 and it changes the overall shape of the permanent deformation 149
curve of the AC layer. It is clear from the mathematical form that as 𝛽𝑁 increases, the absolute 150
value of rut depth will increase. Meanwhile, the other exponent parameter 𝛽𝑇 associated with 151
temperature 𝑇 serves only a localized adjustment of the overall performance curve because of 152
the seasonal variation of the temperature. Therefore, the effect of 𝛽𝑇 on the overall trend is 153
harder to assess. As for the rutting model of unbound materials, although the moisture content 154
would also change the permanent deformation rate, the coefficients in the function 𝜙(𝑁, 𝛼) are 155
not open for local calibration in the MEPDG. These observations are important because 156
otherwise one would not know which local parameter(s) should be adjusted in the local 157
calibration. 158
Global and Local Calibrations 159
NCHRP 1-37A used 88 sections from the Long Term Pavement Performance (LTPP) database, 160
387 data points with pavement life ranging from a few years to more than 20 years for the global 161

Gautam, Yuan, Lee, Li 7
calibration of the three rutting models described above. Because the LTPP database included 162
only surface rutting depth and no trench rut depth was available, the global calibration assumed 163
that the proportion of the observed rut depth in different layers followed the same proportion 164
in the predicted rut depth. The calibration took a complicated four-step process, in which many 165
ad hoc decisions based on engineering judgment were made. 166
An independent review of the MEPDG was done under NCHRP project 1-40A [2]. The 167
review raised a number of issues that need to be resolved before effective implementation of 168
the design guide. One of them is the comparison of other transfer models and the possibility of 169
including them as alternative models for end users to select. This led to another NCHRP 170
project, 9-30A [3], in which three additional AC rutting models were investigated and 171
compared. The final report of that project (i.e., Report 719) was released in 2012. 172
A number of subsequent studies confirmed the essential need of local calibration before 173
the design tool can be used in local design practice. To facilitate local calibration, AASHTO 174
published a guide in 2010 [11]. Although this guide provides the general principles for local 175
calibration, it does not specify the exact optimization process. Many challenging issues in local 176
calibration were left for the local calibrator to address. 177
Many states or provincial transportation departments have initiated local calibration 178
studies based on either LTPP or PMS database. Generally these studies were focussed on 179
sensitivity analysis, design evaluation and assessment, and local calibration. Although the main 180
objective of all calibration is to reduce the bias and standard error, the calibration approaches 181
differ from one another in many ways. The following four major categories of approaches have 182
emerged from the diverse practice: 183
1) Simultaneous full calibration: This type of calibration aims to obtain a single set of 184
optimized value for all of the five local calibration parameters 𝛽𝐴𝐶, 𝛽𝑇, 𝛽𝑁, 𝛽𝐺𝐵 and 𝛽𝑆𝐺 185
simultaneously using some sort of optimization procedure. It has to be pointed out that 186
without trench investigation data or layer contribution information, mathematics dictates 187
that it is impossible to obtain a unique optimal solution. This indeterminate and non-188
unique nature of the rutting calibration, although it may have been previously realized, 189
has never been openly discussed and properly addressed. Rather, many researchers 190
relied, often blindly, on heuristic optimization procedures (e.g., generic algorithm) giving 191
a number of optimal solutions and then used ‘engineering judgment’ to pick the ‘best’ 192
combination of solutions. 193
2) Two-stage full calibration: This category of calibration is similar to the first one, except 194
the ‘optimal’ solution is found by using the two-step strategy that was used in the global 195
calibration. Specifically, the first step minimizes the RSS with a different set of 𝛽𝑇 and 196

Gautam, Yuan, Lee, Li 8
𝛽𝑁 while taking all other betas constant to 1, whereas the second step utilizes the obtained 197
𝛽𝑇 and 𝛽𝑁 values for further reduction of RSS by changing 𝛽𝑟1, 𝛽𝐺𝐵 and 𝛽𝑆𝐺 [12]. This 198
approach is not essentially different than the first one. The reason is that the two steps 199
can iterate further, and there is no guarantee that they will converge. 200
3) Partially pre-set, partially optimized calibration: This method chooses to calibrate only a 201
subset of the five parameters through RSS minimization while keeping the rest in the 202
default value (i.e., 1.0) [13] and pre-set to zero (e.g., some studies pre-set the subgrade 203
rut depth to zero for rehabilitated sections based upon the argument that the subgrade rut 204
in those sections after many years of consolidation is negligible). 205
4) Full calibration through pre-set layer contribution [10]: This method attempts to 206
explicitly address the indeterminacy of rutting local calibration. The root cause of the 207
trouble was traced down to the unknown layer contribution to the total surface rut depth. 208
For that purpose, they investigated the possible range and distribution of the layer 209
contribution from a number of data sources. Using the pre-set layer contribution 210
combinations, they were able to uniquely determine the optimal solution of the five 211
parameters. 212
Based upon the investigation by Waseem and Yuan [10], the research team initiated a few 213
more studies, hoping to find a more solid determination of the layer contribution. It was 214
gradually realized that in the absence of trench studies, the layer rut percentage results were 215
hard to validate. Meanwhile, the recent NCHRP 9-30A project published some reliable 216
calibration results based on field performance and laboratory test data in NCHRP Report 719 217
(thereafter “Report 719”). The report has formed a solid ground to fix some of the local 218
calibration parameters before the RSS minimization process. The next section describes the 219
details of how the traffic and temperature exponents of the AC rutting model were determined. 220
221
TRAFFIC AND TEMPERATURE EXPONENTS IN THE AC RUTTING 222
MODELS 223
NCHRP Project 9-30A focused on the evaluation and recalibration of the MEPDG AC rutting 224
model. It contained both field tests and laboratory specimen tests. Unlike many previous 225
calibration studies, the field test results in this study were corroborated with forensic 226
investigations including trench cutting, core excavation, and falling weight deflection testing, 227
whereas the laboratory permanent deformation tests followed two testing protocols: the triaxial 228
test and the constant-height shear test. A total number of 60 field sections and 46 laboratory 229
specimens were used in the study. For each of those sections and specimens, a longitudinal 230
calibration was performed and the section- or specimen-specific temperature and traffic 231

Gautam, Yuan, Lee, Li 9
exponents were determined. Here the temperature and traffic exponents both are a product of 232
the global and local calibration factors. The sections- or specimen-specific temperature and 233
traffic exponents were listed in the following tables of the original tables: 234
Tables 8 (p.37): Traffic exponents derived from field tests of 37 new constructed 235
sections 236
Table 9 (p.38): Traffic exponents derived from field tests of 23 overlay sections 237
Table 24 (p.78): Traffic and temperature exponents derived from repeated-load triaxial 238
test of 23 reconstituted specimens based on mixture designs of field test sections 239
Table 25 (p.78): Traffic and temperature exponents derived from constant-height shear 240
test of 23 reconstituted specimens based on mixture designs of field test sections 241
Table 26 (p.82): Traffic and temperature exponents derived from constant-height shear 242
test of 5 field-coring specimens. 243
By studying the range and distribution of those exponents we hope to find a reasonable 244
value for the two local calibration exponent factors that can be used for the subsequent local 245
calibration. 246
The Typical Traffic Exponent 247
The section- and specimen-specific traffic exponents in Report 719 invite a number of 248
interesting hypotheses. For example, by comparing the data in Tables 8 and 9 mentioned above, 249
one can determine whether the new pavement sections and the overlay sections should be 250
treated separately in calibration. Interestingly, the answer is no. The sample mean and standard 251
deviation of the traffic exponents in Table 8 for the new constructed sections are 0.305 and 252
0.071, respectively, whereas the mean and standard deviation of the data in Table 9 for the 253
overlay sections are 0.298 and 0.091, respectively. Both the means and standard deviations are 254
so close that a simple t test negates the null hypothesis. Similar conclusions are also drawn for 255
the comparison between the field-derived data and the laboratory specimens with reconstituted 256
mixture subject to constant-height shear test. However, the 𝑡 test suggests that the laboratory 257
test protocol matters in the determination of the traffic exponent. Although the sample mean 258
of the shear test specimens is 0.299, which is very close to the field-derived means mentioned 259
above, the sample mean of the triaxial test specimens is 0.226. According to the 𝑡 test, this 260
difference in sample means is so statistically significant (with 𝑝 value much lower than 1%) 261
lower that one has to reject the null hypothesis. For details of the statistical testing, refer to 262
[14]. These statistical testing concluded that 263
The new constructed sections and the overlay sections have the same traffic 264
exponent; 265

Gautam, Yuan, Lee, Li 10
The field-derived traffic exponent can be the same as the laboratory test-derived 266
traffic exponent, provided that the test is performed under the constant-height 267
shear testing protocol; 268
The traffic exponents obtained from the triaxial test are significant different than 269
the field-derived traffic exponents and those from the shear tests. 270
In the end, the traffic exponent data from Tables 8, 9, 25 and 26 are combined and used to 271
draw the histogram, as shown in FIGURE 2. Ranging from 0.16 to 0.55, the 88 data points 272
have a mean value of 0.30 and standard deviation 0.08. Note that in the global calibration 273
model, the traffic exponent equals 0.4791, which is greater than the exponent of 84/88 cases, 274
or 95 per cent of the cases. This has partly explained why the AASHTOware Pavement ME 275
Design software under the default calibration factors always over predicts the rutting. 276
277
FIGURE 2: Histogram of the field- and laboratory test-derived traffic exponents (Data 278
source: Tables 8, 9, 25 and 26 of NCHRP Report 719) 279
280
A sensitivity analysis was performed to check the overall impact of the traffic exponent 281
(m) on rutting prediction. Under different 𝑚 values ranging from 0.17 to 0.57, fourteen 282
Superpave sections from the MTO database were analyzed. It was found that the predicted rut 283
depths do not change significantly when 𝑚 ≤ 0.35. 284
Report 719 also compared other three AC rutting models: the Asphalt Institute (AI) model, 285
the modified Leahy model, and the Verstraeten model, which all include a traffic term in 286
exponential form. The traffic exponent values of the three models are 0.4354, 0.25, and 0.25, 287
respectively. On the other hand, Waseem and Yuan (2013) performed a preliminary study on 288
Ontario’s Marshall-mix sections using longitudinal calibration and found the traffic exponent 289
varying from 0.11 to 0.57. With all of these considerations it was concluded that the traffic 290
0
5
10
15
20
25
30
0.16 0.20 0.25 0.29 0.33 0.38 0.42 0.46 0.51 >0.51
Nu
mb
er
of
cou
nts
Traffic exponent
Avg = 0.30St Dev = 0.08
Global calibration value = 0.4791

Gautam, Yuan, Lee, Li 11
exponent be set at 0.30 (or 𝛽𝑁 = 0.30 0.4791⁄ = 0.6262) for the subsequent local calibration 291
study. 292
293
The Typical Temperature Exponent 294
Among the four rutting models considered in the NCHRP 9-30A project, only the MEPDG 295
model and the Asphalt Institute (AI) model include a temperature term. The AI model used a 296
temperature exponent (n) of 2.767 whereas the value is 1.5606 for the MEPDG model. The 297
other two rutting models do not explicitly contain a temperature term because, as the proponents 298
argued, the resilient modulus or other material characteristics used in the transfer function have 299
already included the temperature effects and thus adding another temperature term would risk 300
double counting. 301
302
FIGURE 3: Histogram of temperature exponents obtained from triaxial and shear tests 303
(Data source: Tables 24 and 25 of NCHRP Report 719). 304
305
Moreover, Report 719 found that the laboratory-derived temperature exponent is largely 306
dependent upon the material testing methods. The histograms of the triaxial and shear loading 307
test data reported in Tables 24 and 25 of the report, as described above, are depicted in FIGURE 308
3. The triaxial results are systematically smaller than those from the shear tests. The mean 309
value of the triaxial test results is 2.665, which is close to the exponent value set in the AI 310
model, whereas the mean of the shear test is 7.720. This large variation in the temperature 311
exponent blurs the issue. It is our belief that an intensive study of the temperature effect is 312
1.5 2 2.5 3 3.5 4 4.5 5 6 7 8 9 10 110
1
2
3
4
5
6
7
Temperature exponent
Num
ber
of
counts
Shear
Triaxial
MEPDG default
value: 1.5606
AI default
value: 2.767

Gautam, Yuan, Lee, Li 12
required to settle down this issue. With consideration that many past local calibration studies 313
simply left the temperature exponent at the default value, this study also chose to fix the 314
temperature exponent at its global value of 1.5606. In other words the local calibration 315
coefficient 𝛽𝑇 is preset to 1.0 in this local calibration study. 316
LOCAL CALIBRATION METHOD 317
The study follows the general working procedure of the local calibration guide suggested by 318
[11], which includes development of a local calibration database that considers the proper 319
hierarchical input level of accuracy for each input parameter and includes an appropriate sample 320
size of pavement sections with sufficient length of performance data records. The details of 321
database development are discussed in the next section. This section focuses on the discussion 322
of the local calibration optimization procedure, as the method used in this study is not exactly 323
the same as suggested by the local calibration guide, and the authors believe that the method 324
proposed in the study is better than the vague two-step approach suggested in the local 325
calibration guide. 326
Using the two pre-set exponents discussed in the preceding section, the local calibration 327
needs to determine only the three scale factors (𝛽𝐴𝐶 , 𝛽𝐺𝐵, 𝛽𝑆𝐺 ), one for each material. To 328
determine them, the following two objectives are considered: (1) minimize the bias and (2) 329
minimize the Residual Sum of Squares (RSS), where the bias and RSS are defined as: 330
RSS = ∑(𝐷𝑖 − 𝑑𝑖)²
𝑛
𝑖=1
(5)
Bias = ∑(𝐷𝑖 − 𝑑𝑖)
𝑛
𝑖=1
(6)
where 𝑛 is the total number of rut depth measurements in the calibration set; 𝑑𝑖 the observed 331
rut depth; and 𝐷𝑖 the calculated total rut depth. These two objectives are usually compatible 332
in the sense that any additional bias will increase the RSS. In an ideal case, the RSS is 333
minimized only if the bias is zero. However, the natural constraint that the three scale factors 334
must be nonnegative cannot guarantee that the bias is eliminated when the RSS is minimized. 335
Since the three scale factors 𝛽𝐴𝐶 , 𝛽𝐺𝐵 and 𝛽𝑆𝐺 all are direct multipliers of the rutting 336
models, one can estimate the rut depth for each structural layer by using the rutting models with 337
the default value of 1.0 except 𝛽𝑁= 0.6262. Denote the rut depths that are so estimated by 338
𝐷𝐴𝐶𝑖,𝑔 , 𝐷𝐺𝐵𝑖,𝑔 and 𝐷𝑆𝐺𝑖,𝑔 for the AC, granular base/sub-base, and sub-grade soil layers, 339
respectively. Then the predicted (or calculated) rut depth is expressed as 340
𝐷𝑖 = 𝛽𝑟1𝐷𝐴𝐶𝑖,𝑔 + 𝛽𝐺𝐵𝐷𝐺𝐵𝑖,𝑔 + 𝛽𝑆𝐺𝐷𝑆𝐺𝑖,𝑔 (7)

Gautam, Yuan, Lee, Li 13
If RSS is the only objective function of the local calibration, then it is readily shown that 341
the RSS minimization is equivalent to solving three simultaneous linear equations (similar to a 342
linear regression problem). Unfortunately, a few trial calibrations using the actual Ontario road 343
data suggested that this simple least square solution might lead to negative values for the three 344
calibration factors. Therefore, additional constraints should be added to the minimization 345
process. For this purpose the minimization of the absolute bias was introduced. In the end, the 346
local calibration problem is formulated as the following two-objective constrained optimization 347
problem: 348
minimize RSS and |Bias|
s.t. 𝛽𝐴𝐶 , 𝛽𝐺𝐵 , 𝛽𝑆𝐺 ≥ 0 (8)
The Excel Solver was used to solve the optimization. First, the RSS minimization and 349
bias elimination were solved separately. These two results would provide a general sense of 350
the range of the solutions. Using these two solutions as a guide, one could use a constrained 351
method (that is, minimize RSS while limiting the absolute bias to a certain prescribed number) 352
to find the Pareto efficiency frontier of the two-objective optimization problem. The final 353
solution was determined by weighing the relative importance of RSS and bias. Engineering 354
judgment would have to be used in the decision. Finally, the calibrated factors were validated 355
with the validation sections. It is important to note that since the predicted rut depth is a linear 356
function of the local calibration factors, as shown in Eq. (7), the optimization does not involve 357
repetitive MEPDG analyses using AASHTOware Pavement ME Design. In fact, for each 358
section, the one analysis that uses default values for the local calibration factors except 𝛽𝑁 =359
0.6262 is sufficient. This feature has greatly reduced the computational efforts involved in the 360
local calibration study. 361
CALIBRATION DATABASE 362
MTO started to introduce Superpave mix into pavement construction as the top asphalt layer(s) 363
in the year of 2001. For this study we selected 87 Superpave projects, which contains 140 364
pavement sections in the pavement management system. These projects have different 365
pavement structures and highway types, spreading over all of the five climatic zones of Ontario. 366
After a series of data cleansing, only 84 sections are qualified for calibration because the rest 367
lack reliable input information. The 84 pavement sections are further divided into a calibration 368
set of 42 sections and a validation set of 42 sections. This half-half calibration-validation 369
division scheme can be used because many of the Superpave projects include multiple sections, 370
and with very minor change in the environmental conditions the sections in the same project 371
can be considered as random replica. 372

Gautam, Yuan, Lee, Li 14
The rutting data of the selected pavement sections were retrieved from MTO’s PMS-2 373
system. Although MTO has started to collect rut depth data since 2002, the data collection 374
technology has undergone a significant change in 2012. Starting in 2012, the rut depth was 375
collected using Fugro Roadware’s ARAN 9000 automated pavement data collection system. 376
ARAN 9000 contains a Laser XVP that uses two synchronized, laser-based devices to measure 377
the transverse profile of a 4.1 m (13.5 ft) lane width, with a lateral resolution of approximately 378
1,280 points. The rut depth measure accuracy is reported to be 1 mm [5], which represents a 379
significant improvement from the previous rut depth measurement system. For this reason, 380
only the rutting data of Year 2012 were used in the local calibration. This type of local 381
calibration is called cross-sectional calibration because only one-year of data are used. This is 382
in contrast with the so-called longitudinal calibration in which the multiple-year longitudinal 383
histories of rutting are used to track the prediction trend. Although the rutting data used in the 384
study were collected only in 2012, the data covers a wide range of pavement age from 1 year 385
to 11 years. Therefore, it can be stated that the rutting data have a good life-cycle 386
representation. 387
The local calibration method developed in this study was also applied to the calibration of 388
Marshall-mix sections in the previous database developed by Jannat [4]. The database includes 389
10 new/reconstruction sections and 19 rehabilitated sections. The 29 sections were divided into 390
a calibration set of 19 sections (mixed of new and rehabilitation sections) and a validation set 391
for the remaining. The same input data collection protocol for the Superpave database was 392
employed, except that the rutting data of the Marshall-mix sections were collected over the 393
years between 2002 and 2010. Note that the precision of the rut depth measurement technology 394
was not as good as the Laser XVP after 2012. This will affect the local calibration results that 395
are to be discussed subsequently. 396
CALIBRATION RESULTS & DISCUSSION 397
Results for Superpave Sections 398
The cross-sectional calibration was performed on 42 Ontario Superpave pavement sections by 399
comparing the observed and predicted rut depth in the year 2012. As described previously, the 400
calibration involves dual tasks: eliminate bias and minimize RSS. Initialized with the default 401
value 1.0 for all of the three local calibration factors, the bias elimination process gives the 402
following result: 403
𝛽𝐴𝐶 = 4.1565, 𝛽𝐺𝐵 = 0, 𝛽𝑆𝐺 = 0.1452 with |Bias| = 0 and RSS = 48.55; 404
whereas the RSS minimization yields: 405
𝛽𝐴𝐶 = 4.5679, 𝛽𝐺𝐵 = 0, 𝛽𝑆𝐺 = 0.1299 with |Bias| = 1.06 and RSS = 48.43. 406

Gautam, Yuan, Lee, Li 15
It has to be pointed out that both processes are actually sensitive to the initial value fed into the 407
optimizer. For example, given another set of initial value, the bias elimination process ends up 408
with: 409
𝛽𝐴𝐶 = 0.9628, 𝛽𝐺𝐵 = 0.6310, 𝛽𝑆𝐺 = 0.0295 with |Bias| = 0 and RSS = 141.5, 410
which is drastically different than the previous result. This is explained by the indeterminacy 411
induced by the unknown layer contribution to rutting. Nevertheless, although both solutions 412
successfully eliminate the bias, the RSS is very different. Therefore, only the first solution is 413
considered a valid result. 414
But the results from the bias elimination and RSS minimization are still very different. To 415
decide which one is better, the constrained method described previously is used to construct the 416
Pareto efficiency frontier. Specifically, the two-objective optimization is converted to a single-417
objective optimization that minimizes the RSS while maintaining the nonnegative constraints 418
in Eq. (8) and adding an additional constraint that the absolute bias must be less than or equal 419
to some prescribed number. Since the previous two extreme cases provide the range of the bias 420
from 0 to 1.06, the prescribed number in the bias constraint can be set to be 0.1, 0.2, 0.3, 0.5 421
and 0.8. Solving these constrained optimization problems yields different solutions with the 422
minimized RSS. Plotting the minimized RSS against the prescribed bias, one obtains the 423
efficiency frontier of the two-objective optimization problem shown in FIGURE 4(a). FIGURE 424
4(b) shows the corresponding curve for the validation dataset using the solution from the 425
calibration results. 426
427
FIGURE 4: The efficiency frontiers of the two-objective calibration process 428
429
Both curves in Figure 4 suggest that the bias and RSS are two incompatible objectives: 430
decreasing one will necessarily increase the other. However, the sensitivities are different. 431
While the total bias of the calibration set increases from 0 to 1 and above, the total RSS reduces 432
by only 0.12, which is really negligible. Similar observation is made in the validation set. Also 433
48.42
48.44
48.46
48.48
48.5
48.52
48.54
48.56
48.58
0 0.2 0.4 0.6 0.8 1 1.2
RSS
(m
m2 )
Total Bias (mm)
(a) Calibration
53.35
53.4
53.45
53.5
53.55
53.6
53.65
53.7
53.75
53.8
1.5 1.7 1.9 2.1 2.3 2.5 2.7 2.9
RSS
(m
m2 )
Total Bias (mm)
(b) Validation

Gautam, Yuan, Lee, Li 16
because bias is more important than RSS for design, it is concluded that the first solution is 434
taken as the final result of the cross-sectional local calibration for Ontario’s Superpave sections. 435
The corresponding standard deviation of residuals is estimated to be 1.10 mm, which is very 436
close to the measurement precision (1.0 mm) of the Laser XVP in ARAN 9000. 437
To validate, the corresponding mean bias and standard deviation of residuals of the 438
validation data are -0.03 mm and 1.16 mm. A simple F-test for the standard deviations of the 439
calibration and validation data provides a 𝑝 value of approximately 37%. This shows good 440
validation of the result. 441
442
FIGURE 5: Predicted versus observed rut depth for the Superpave sections 443
444
FIGURE 5 shows the scatterplot of the predicted versus the observed rut depth for 445
calibration and validation sets. Both sets of data showed a similar range of variation, and both 446
are scattered around the line of equality. 447
Results for Marshall-Mix Sections 448
Similar calibration and validation analyses were performed for the Marshall-mix sections with 449
preset exponent values 𝛽𝑁 = 0.6262 and 𝛽𝑇 = 1.0. Interestingly, very similar efficient frontier 450
curves are obtained as we have seen in for the Superpave sections. There are also two major 451
differences: 452
(1) The optimal scaling calibration factors are set at 𝛽𝐴𝐶 = 10.394, 𝛽𝐺𝐵 = 0.7116 and 453
𝛽𝑆𝐺 = 0. This is very different from the Superpave results in which 𝛽𝐺𝐵 is found to 454
be zero. Further discussion about this difference is made in the next subsection. 455
0
1
2
3
4
5
6
0 1 2 3 4 5 6
Pre
dic
ted
ru
t d
ep
th (
mm
)
Observed rut depth (mm)
Calibration
Validation

Gautam, Yuan, Lee, Li 17
(2) The resulted standard deviations of the residuals are greater than those for Superpave 456
sections. For the calibration sections, the standard deviation is 1.88 mm, whereas the 457
value increases slightly to 2.03 mm for the validation sections. Recall that the 458
Marshall-mix sections had the latest rut depth measurements in 2010, for which the 459
old-generation of measurement technology was used. The difference in the 460
measurement precision explains the difference in the standard deviation. 461
The calibration results are also well validated. The calibrated models yield very small bias 462
in the validation sections. An 𝐹 test for the two variances of the residuals gives a 𝑝 value of, 463
coincidently, also 37%. This again shows good validation of the calibration outcomes. 464
The local calibration results are comparable to, if not better than, the global calibration 465
results. Although the Ontario local calibration includes a smaller sample size, the standard 466
deviations achieved are close to the precision of the measurement technology. For both the 467
Superpave and Marshall-mix sections, the large overprediction of the global model has been 468
eliminated through the local calibration. 469
Discussions 470
Several interesting issues are discussed below. First, it has to be emphasized that the zero 𝛽𝑆𝐺 471
for Marshall-mix sections and the zero 𝛽𝐺𝐵 for the Superpave sections both are the result of the 472
nonnegative constraint posed on the calibration factors, as described in Eq. (8). Should this 473
constraint be removed, some negative values would be obtained, which does not make physical 474
sense, even though the negative values would bring the RSS to a further lower level. However, 475
the reason why for Marshall-mix roads 𝛽𝑆𝐺 is zero and for Superpave roads 𝛽𝐺𝐵 is zero is not 476
clear. This clearly invites a further study. Forensic investigations of a few pavement sections 477
would help address this issue. On the other hand, this vast difference of the calibrated models 478
for the two AC materials indicates that these two types of pavements have to be calibrated 479
separately. 480
Second, the percentage contribution of different layers to the total surface rutting is an 481
important indicator for the validation of local calibration results. For Marshall-mix pavements, 482
the AC layer contribution varies from 40% to 84% with an average of 60%, whereas in 483
Superpave pavements, the AC layer accounts for 29% to 62% of the total rut with an average 484
contribution of 47%. The greater contribution of the AC layer in Marshall-mix roads is 485
attributed to the greater 𝛽𝐴𝐶 value in this type of roads. This result seems reasonable, as the 486
Superpave AC is expected to be more rutting resistant than the Marshall-mixes. Moreover, 487
Salama et al. (2006) calibrated the VESYS mechanistic-empirical rut model and then used the 488
calibrated model to predict average layer contribution to rutting in 43 SPS-1 pavement sections 489
from the LTPP database [15]. On average 57% of the rutting came from the AC layer, and 43% 490

Gautam, Yuan, Lee, Li 18
from the unbound materials. Zhou and Scullion (2002) studied the Accelerated Loading 491
Facility-Texas Mobile Load Simulator data and found the AC layer contribution was about 68% 492
on average [16]. 493
Finally, as mentioned earlier, this study represents a cross-sectional local calibration. 494
Although the calibration data covers a fairly wide range of pavement age (1 to 11 years), it is 495
interesting to check if the calibrated model is able to capture the life-cycle rutting trend for a 496
specific pavement section. To this end, the four sections shown in FIGURE 1 are evaluated 497
again using the calibrated models. The predicted results are depicted as broken lines in 498
FIGURE 1. It is clear that both the calibrated models predict the trend very well for both the 499
Marshall-mix and Superpave sections. 500
CONCLUSIONS 501
The study focuses on the location calibration of rutting models and covers both the Superpave 502
and Marshall-mix sections that have been used in the roads under the jurisdiction of the MTO. 503
The calibration method is featured with a pre-fixed set of traffic and temperature exponents of 504
the AC rutting mode. The two exponent calibration factors are determined based on a series of 505
secondary analyses of the results from the recalibration study of NCHRP 9-30A. The 506
calibration and validation results show that although the traffic and temperature exponents can 507
take the same values for the Superpave and Marshall-mix roads, the scale calibration factors 508
actually differ significantly between the two asphalt materials. With the common exponent 509
factors (𝛽𝑁 = 0.6262 and 𝛽𝑇 = 1.0), the three scale calibration factors are found to be as 510
follows: 511
For Superpave roads: 𝛽𝐴𝐶 = 4.1565, 𝛽𝐺𝐵 = 0.0004, 𝛽𝑆𝐺 = 0.1452 with standard 512
deviation of residuals equal to 1.10 mm; 513
For Marshall-mix roads: 𝛽𝐴𝐶 = 10.394, 𝛽𝐺𝐵 = 0.7116 and 𝛽𝑆𝐺 = 0 with the standard 514
deviation being 1.88 mm. 515
Although Marshall-mix asphalts are no longer used in new road construction in Ontario, 516
the existing Marshall-mix asphalts are often part of the surface layer of the overlay or other 517
types of rehabilitated pavements. As the AASHTO software allows for layer-specific transfer 518
models, the different AC rutting models for Superpave and Marshall-mix materials may further 519
improve the prediction accuracy of the mechanistic-empirical approach. 520
ACKNOWLEDGEMENT 521
This research is funded by a grant from the MTO under the Highway Infrastructure 522
Innovation Funding Program. The financial support of this organization is highly appreciated. 523

Gautam, Yuan, Lee, Li 19
REFERENCES 524
1. NCHRP, Guide for Mechanistic Empirical Design of New and Rehabilitated Pavement 525
Structures, 2004: ARA, Inc., ERES Division 505 West University Avenue Champaign, 526
Illinois 61820. 527
2. Brown, S.F., M.R. Thompson, and E.J. Barenberg, Research Results Digest 307, in Research 528
Results Digest, National Cooperative Highway Research Program 2006. 529
3. Von Quintus, H.L., et al., NCHRP REPORT 719 Calibration of Rutting Models for 530
Structural and Mix Design, 2012, AASHTO: Washington, D.C. 531
4. Jannat, G.E., Database Development for Ontario's Local Calibration of Mechanistic-532
Empirical Pavement Design Guide (MEPDG) Distress Models, in Department of Civil 533
Engineering2012, Ryerson University. 534
5. Fugro Roadware, Laser XVP, 2013: http://www.roadware.com/related/Laser-535
XVP_2014.pdf. 536
6. Jannat, G., Database Development for Ontario’s Local Calibration of Mechanistic-537
Empirical Pavement Design Guide (MEPDG) Distress Model, 2012, Ryerson University. p. 538
163. 539
7. Jannat, G.E., et al., Database Development for Ontario's Local Calibration of the MEPDG 540
Distress Models for Flexible Pavements in The 9th International Transportation Specialty 541
Conference, CSCE2012: Edmonton, AB. 542
8. Jannat, G.E., X.-X. Yuan, and M. Shehata, Development of regression equations for local 543
calibration of rutting and IRI as predicted by the MEPDG models for flexible pavements 544
using Ontario's long-term PMS data. International Journal of Pavement Engineering, 2015. 545
17(2): p. 166-175. 546
9. Waseem, A., Methodology Development and Local Calibration of MEPDG Permanent 547
Deformation Models for Ontarios Flexible Pavements in Department of Civil Engineering 548
2013, Ryerson University. 549
10. Waseem, A. and X.-X. Yuan, Longitudinal local calibration of MEPDG permanent 550
deformation models for reconstructed flexible pavements using PMS data. International 551
Journal of Pavement Research and Technology, 2013. 6(4): p. 304-312. 552
11. AASHTO, Guide for the Local Calibration of the Mechanical-Empirical Pavement 553
Design Guide, ed. Joint Technical Committee on Pavements2010, Washington DC: 554
American Association of State Highway and Transportation Officials. 555
12. Tarefder, R. and J.I. Rodriguez-Ruiz, Local Calibration of MEPDG for Flexible 556
Pavements in New Mexico. Journal of Transportation Engineering, 2013. 139(10): p. 981-557
991. 558
13. Banerjee, A., J.P. Aguiar-Moya, and J.A. Prozzi, Calibration of mechanistic-empirical 559
pavement design guide permanent deformation models. Transportation Research Record, 560
2009. (2094): p. 12-20. 561
14. Gautam, G.P., Local Calibration of MEPDG Rutting Models for Ontario's Superpave 562
Pavements, in Department of Civil Engineering2015, Ryerson University. 563
15. Salama, H., K. Chatti, and S. Haider, Backcalculation of permanent deformation 564
parameters using time series rut data from in-service pavements. Transportation Research 565
Record, 2006. 1949: p. 98-109. 566
16. Zhou, F. and T. Scullion, VESYS5 Rutting Model Calibrations with Local Accelerated 567
Pavement Test Data and Associated Implementation, 2002, The Texas A&M University. 568






![ONTARIO'S LOCAL CALIBRATION OF THE MEPDG DISTRESS AND ... · original MEPDG documents [13] and AASHTO Manual of Practice [14, 15] are confusing and we are trying to provide a clearer](https://img.dokumen.tips/doc/110x75/5e5a19a838929b37dd196001/ontarios-local-calibration-of-the-mepdg-distress-and-original-mepdg-documents.jpg)