Embed Size (px)
Citation preview

1

2
Contents
5.1 Introduction
5.2 Stability Analysis
5.3 Steady-state analysis
5.4 Dynamic analysis
5.5 Controllability, reachability, observability, detectability

3
5.1 Introduction
To apply a CCS to industry, we must analyze
Stability (z-plane)
Steady-state analysis (steady-state error)
Dynamic analysis (transient propoty)
Analysis of CTS: s-plane
Analysis of CCS: z-plane

4
5.2 Stability Analysis
5.2.1 The relationship between s-plane and z-plane
The pole and zero locations of CCS in z-plane are related to the
pole and zero locations of CTS in s-plane.
The dynamic specifications of CCS is dependable to T.
(1) The left half-s-plane:
(2) The jω of s-plane:
( ) ( 2 )
0, 1, 2,
,
sT j T T j T T j T k
T
s j
z e e e e e e
k
z e z T
1
1
Tz e
z

5
5.2 Stability Analysis(3) The periodic strips
A point in z plane →infinite points in s planeA point in s plane → a single point in z plane

6
5.2 Stability Analysis
Figure 5.2 (a) Constant attenuation lines in the s plane
(b) Corresponding loci in the z plane
(4) Some commonly used contour
a. constant-attenuation loci (σ)

7
5.2 Stability Analysis
Figure 5.3 (a) Constant-frequency loci in the s plane
(b) The corresponding loci in the z plane
•Left half-s-plane, : z-plane 0-(-1) negative real axis
•Negative real axis in s-plane : z-plane 0-1 positive real axis
•Right half-s-plane, : z-plane 1-∞ positive real axis
/ 2s
sn
b. Constant frequency (ω)

8
5.2 Stability Analysis

9
5.2 Stability Analysis
c. Constant damping ratio (ξ)

10
5.2 Stability Analysis
s
d
s
d
s
d
s
ddn
Ts
dnnn
ω
ωπz
)ω
ω
ξ
πξ(z
)ω
ωπj
ω
ω
ξ
πξ(T)jωTξω(ez
jωξωξjωξωs
2
1
2exp
21
2expexp
1
2
2
2

11
5.2 Stability Analysis

12
5.2 Stability Analysis

13
5.2 Stability Analysis
5.2.2 Stability definition

14
5.2 Stability Analysis
(1) Stability and asymptotic stability
Consider the discrete-time state-space equation (possibly nonlinear and time-varying)
x (k+1) = f (x(k), k) (4.1)
Let x0(k) and x(k) be solutions of (4.1) when the initial conditions
are x0(k0) and x(k0) respectively. Further, let ║·║denote a vector
norm.
Definitions 5.1 STABILITY
The solution x0(k) of (4.1) is stable if for a given > 0, there exist
s a (, k0)>0 such that all solutions with║x(k0) - x0(k0)║< such
that ║x(k) - x0(k)║< when k k0.

15
5.2 Stability Analysis
Definitions 5.2 ASYMPTOTIC STABILITY
The solution x0(k) of (4.1) is asymptotically stable if it is stable a
nd if can be chosen such that║x(k0) - x0(k0)║< implies that ║
x(k) - x0(k)║0 when k .
For linear, time-invariant systems, stability is a property of the sy
stem and not of a special solution.

16
5.2 Stability Analysis
Theorem 5.1 ASYMPTOTIC STABILITY OF LINEAR SYSTEM
x(k+1) = x (k) x(0) = a (4.2)
A discrete-time linear time-invariant system (4.2) is asymptotical
ly stable if and only if all eigenvalues of are strictly inside the
unit disc.
Remark:
If a simple pole lie at z = 1, then the system becomes critically st
able. Also, the system becomes critically stable if a single pair of
conjugate complex poles lies on the unit circle in the z plane.
Any multiple closed-loop poles on the unit circle makes the syst
em unstable.

17
5.2 Stability Analysis
Example 5.1: Consider the closed-loop control system shown in Fig. 5.9. Dete
rmine the stability of the system when K = 1, T=1. The open-loop transfer function G(s) of the system is
1( )
( 1)G s
s s

18
5.2 Stability Analysis
The z transform of G(s) is
the closed-loop pulse transfer function for the system is
The characteristic equation is
which becomes
1 0.3679 0.2642( ) (1 ) ( ) /
( 0.3679)( 1)
zG z z Z G s s
z z
)(1
)(
)(
)(
zG
zG
zR
zC
0)(1 zG
02642.03679.0)1)(3679.0( zzz
06321.02 zz

19
5.2 Stability Analysis
The roots of the characteristic equation are found to be
Since
the system is stable.
If K > 2.3925 , the system is stable or not?
6181.05.0,6181.05.0 11 jzjz
121 zz

20
5.2 Stability Analysis
(2) Input-Output Stability
Definition 5.3 BOUNDED-INPUT BOUNDED-OUTPUT STABILITY
A linear time-invariant system is defined as bounded-input-
bounded-output (BIBO) stability if a bounded input gives a
bounded output for every initial value.
Theorem 5.2 RELATION BETWEEN STABILITY CONCEPTS
Asymptotic stability implies stability and BIBO stability.

21
5.2 Stability Analysis
5.2.3 Stability test
a. Direct computation of the eigenvalues of
b. Methods based on properties of characteristic polynomials
c. The root locus method (assume the open-loop system is known)
d. The Nyquist criterion (assume the open-loop system is known)
e. Lyapunov’s method (non-linear, time-variant)

22
5.2 Stability Analysis
(1) The Jury Stability Criterion Suppose the characteristic equation is
(5.4) Form the table,
0)( 110
nnn azazazA

23
5.2 Stability Analysis
Theorem 5.3 JURY’S STABILITY TEST
If a0 > 0, then (4.4) has all roots inside the unit disc if and only if
all a0k, k = 0,1,…,n-1 are positive. If no a0
k is zero, then the
number of negative a0k is equal to the number of roots outside
the unit disc.
Remark
If all a0k are positive for k = 1,2,…,n-1, then the condition a0
0 > 0
can be shown to be equivalent to the conditions
A(1)>0
(-1)nA(-1)>0

24
5.2 Stability Analysis
Example 5.2:
| |

25
5.2 Stability Analysis

26
5.2 Stability Analysis
(2) Routh stability criterion after bilinear transformation
The bilinear transformation is defined by 1 1
or 1 1
w zz w
w z

27
5.2 Stability Analysis
1( )
1
zw
z

28
5.2 Stability Analysis
First substitute (1+w)/(1-w) for z in the characteristic equation
as follows
Then, clearing the fractions by multiplying both sides of this last
equation by (1-w)n, we obtain
Once we transform P(z)= 0 into Q(w)= 0, it is possible to apply Routh
stability criterion in the same manner as in the continuous-time systems.
0)( 11
10
nnnn azazazazP
1
0 1 1
1 1 1........ 0
1 1 1
n n
n n
w w wa a a a
w w w
0.......)( 11
10
nnnn bzbwbwbwQ

29
5.2 Stability Analysis
Example 5.3 Discussing the system’s stability (shown as the following Figure)
by applying Routh stability criterion.

30
5.2 Stability Analysis

31
5.2 Stability Analysis

32
5.2 Stability Analysis
(3) For systems with order 2, Jury’s stability test is simplified to (with the restricted condition that A(z) must be a0 = 1)
A(1) > 0A(-1) > 0|A(0)| < 1
Proof: Suppose a system with order 2 is: First we will form the Jury table 1 a b b a 1 1-b2 a-ab a-ab 1-b2
(1-b2)-{a2(1-b)2/1-b2}={(1-b)(1+b)2/(1+b)}-{a2(1-b)/1+b}=(1-b)/(1+b){ (1+b)2-a2}
2( ) 0A z z az b

33
5.2 Stability Analysis
According to the Jury stability test rules, the system is stable if
and only if
1-b2>0 |b|<1 -1<b<1 (1-b)/(1+b)>0
and (1-b)/(1+b){(1+b)2-a2}>0 {(1+b)2-a2}>0 |a/(1+b)|<1
-1<a/(1+b)<1
-1-b<a<1+b 1+b+a>0 and 1+b-a>0
We all know that
|b|<1 is equivalent to |A(0)|<1
1+b+a>0 is equivalent to A(1)>0
1+b-a>0 is equivalent to A(-1)>0

34
5.2 Stability Analysis
Example 5.4: The system is the same as example 5.3, directly ascertain the
K’s value scale in Z-plane.

35
5.2 Stability Analysis
Example 5.5
Determine the range of K when system is stable where
Y(s)
R(s)
_ D(z) ZOH G(s)
G(z)
T
kzDTs
sG
)(,1,1
1)(
394.20
394.2182.51)0(
382.260104.6736.2)1(
00632.0)1(
0264.0368.0)368.1368.0(0)(1)(
)368.0)(1(
264.0368.0}
)({)1()(
2
1
K
KA
KKA
KKA
KzKzzKGzA
zz
z
s
sGZzzG

36
5.2 Stability Analysis
5.2.4 Relative Stability
Definition 5.4 AMPLITUDE MARGIN
Let the open-loop system have the pulse-transfer function H(z)
and let 0 be the smallest frequency such that
and such that is decreasing for = 0 . The amplitude or gain m
argin is then defined as
)(arg 0hieH
|)(|
10
arg himeH
A

37
5.2 Stability Analysis
Definition 5.5 PHASE MARGIN
Let the open-loop system have the pulse-transfer function H(z)
and further let the crossover frequency c be the smallest frequ
ency such that
The phase margin marg is then defined as
1)( hi ceH
)(argarghi
mceH

38
Exercises
(a)
(b)

39
Exercises
(c)
(d)

40
5.3 Steady-state analysis
5.3.1 Steady-state response to input signal
The steady-state performance of a stable control system is gene
rally judged by the steady-state error due to step, ramp, and acc
eleration inputs.
Suppose the open-loop pulse transfer function is given by the e
quation
where B(z)/A(z) contains neither a pole nor a zero at z =1. Then
the system can be classified as a type 0 system, a type 1 syste
m, or a type 2 system according to whether N = 0, N = 1, or N =
2, respectively.
)(
)(
)1(
1
zA
zB
z N

41
5.3 Steady-state analysis
Consider the typical discrete-time control system
From the diagram we have the actuating error
Figure 5.10 Close-loop control system
)()()( tbtrte

42
5.3 Steady-state analysis
Consider the steady-state actuating error at the sampling instants, from the final value theorem, we have
and
where
so
1
1lim ( ) lim 1 ( )k z
e kT z E z
)()(1
1)( zR
zGHzE
s
sHsGZzzGH
)()()1()( 1
)(
)(1
11lim 1
1zR
zGHze
zss
( ) ( ) ( ) ( ) ( ) ( )E z R z B z R z GH z E z

43
5.3 Steady-state analysis
(1) Static Position Error Constant
For a unit-step input r(t) = 1(t), we have
We define the static position error constant Kp as follows
Then the steady-state actuating error in response to a unit-step i
nput can be obtained from the equation
11
1)(
zzR
)(1
1lim
1
1
)(1
11lim
111
1 zGHzzGHze
zzss
)(lim1
zGHKz
p
pss Ke
1
1

44
5.3 Steady-state analysis
If Kp = , which requires that GH(z) have at least one pole at z = 1, the steady-state actuating error in response to a unit-step input will become zero.
For type 0 system:
For type I system:
For type II system:
pss Ke
1
1
0sse
0sse
)(')1(
1lim
11zGH
zK
izp

45
5.3 Steady-state analysis
(2) Static Velocity Error Constant
For a unit-ramp input r(t) = t, we have
We define the static velocity error constant Kv as follows
21
1
)1()(
z
TzzR
)()1(
lim)1()(1
11lim
1121
11
1 zGHz
T
z
Tz
zGHze
zzss
T
zGHzK
zv
)()1(lim
1
1

46
5.3 Steady-state analysis
Then the steady-state actuating error in response to a unit-ramp input c
an be given by
If Kv = , then the steady-state actuating error in response to a unit-ra
mp input is zero. This requires GH(z) to possess a double pole z = 1.
For type 0 system:
For type I system:
For type II system:
vss Ke
1
izv
zT
zGHzK
)1(
)(')1(lim
1
1
1
vss Ke
1
sse
0sse

47
5.3 Steady-state analysis
(3) Static Acceleration Error Constant For a unit-acceleration input r(t)= t2/2, we have
We define the static acceleration error constant Ka as follows
31
112
)1(2
)1()(
z
zzTzR
)()1(
lim)1(2
)1(
)(1
11lim
21
2
131
1121
1 zGHz
T
z
zzT
zGHze
zzss
2
21
1
)()1(lim
T
zGHzK
za

48
5.3 Steady-state analysis
Then the steady-state actuating error in response to a unit-acceleration input can be obtained from the equation
The steady-state actuating error in response to a unit-acceleration input become zero if Ka = . This requires GH(z) to possess a triple pole z=1.
For type 0 system:
For type I system:
For type II system:
sse
iza
zT
zGHzK
)1(
)(')1(lim
12
21
1
ass Ke
1
sse
ass Ke
1

49
5.3 Steady-state analysis
Table 5.1 system types and the corresponding steady-state error
in response to special input
System Step-input Ramp-input Acceleration-input
Type 0 1/(1+Kp)
Type 1 0 1/Kv
Type 2 0 0 1/Ka

50
5.3 Steady-state analysis
Remark:
1. We should test the stability of the system before we compute the
steady-state error of the system.
2. For non-unit input signal, static error constants are not changed,
but steady-state error will be different according to the coefficien
ts of the input signal.
3. For multiple input signals, the steady-state error can be compute
d by superposing multiple steady-state errors.
For example, if r(t) = a + bt, then
vpss K
b
K
ae
1

51
5.3 Steady-state analysis
4. For a different closed-loop configuration, it is noted that if the
closed-loop discrete-time control has a closed-loop pulse
transfer function, then the static error constants can be
determined by an analysis similar to the one just presented. If
the closed-loop discrete-time control system does not have a
closed-loop pulse transfer function, however, the static error
constants cannot be defined, because the input signal cannot
be separated from the system dynamics.

52
5.3 Steady-state analysis
Example 5.6
where
a. T = 0.5, k = 6 and 10, compute the ess respectively;
b. T = 0.5, determine the range of the k for satisfying ess 0.05.
Y(s)
R(s) _ D(z) ZOH G(s)
G(z)
Y(s)
1( ) , ( ) , ( ) 1( ) 0.5
1 1
kzG s D z r t t t
s z

53
5.3 Steady-state analysis
Solution:
Judge the stability of the system:
1 ( ) 1 (1 )( ) (1 ) { } , ( ) ( ) ( )
( 1)( )
T T
T T
G s e k e zG z z Z Q z D z G z
s z e z z e
0)1()1(0)(1)( 2 zekezezzQzA TTT
(1) (1 ) 0 0 (0 1)T TA k e k e
T
T
e
ekA
1
)1(20)1(
1)0( A

54
5.3 Steady-state analysis
a. when T = 0.5, k should satisfy 0 < k < 8.15, so we should only
need to compute ess for k = 6.
b.
with the stability condition 0 < k < 8.15, we conclude that
1 1
(1 )lim ( ) lim
( 1)( )
T
p Tz z
k e zK Q z
z z e
1 1
1 1
1 1
1 11
(1 ) ( ) (1 ) (1 )lim lim
( 1)( )
(1 ) (1 )lim
(1 )(1 )
T
v Tz z
T
Tz
z Q z z k e zK
T T z z e
z k e z k
T Tz z e
042.02
5.0
1
1
k
T
KKe
vpss
505.02
kk
Tess
15.85 k

55
5.3 Steady-state analysis
Table 5.2 Static error constants for typical closed-loop configurations of discrete-time control systems

56
5.3 Steady-state analysis

57
5.3 Steady-state analysis
5.3.2 Steady-state response to disturbances
Let us assume that the reference input is zero, or R(z) = 0 in the
system shown in Fig. 5.11(a), but the system is subjected to dist
urbance N(z). For this case the block diagram of the system can
be redrawn as shown in Figure 5-11(b).
Then the response C(z) to disturbance N(z) can be found from t
he closed-loop transfer function
If |GD(z)G(z)|>>1, then we find that
)()(1
)(
)(
)(
zGzG
zG
zN
zC
D
)(
1
)(
)(
zGzN
zC
D

58
5.3 Steady-state analysis
Figure 5.11 (a) Digital closed-loop control system subjected to reference input and
disturbance input; (b) modified block diagram where the disturbance input is
considered the input to the system
C(z) N(z) _ G(z)
GD(z)
C(z) R(z) = 0
_ GD(z) G(z)
N(z)
(a)
(b)

59
5.3 Steady-state analysis
Since the system error is
We find the error E(z) due to the disturbance N(z) to be
Thus, the larger the gain of GD(z) is, the smaller the error E(z). If
GD(z) includes an integrator [which means that GD(z) has a pole
at z = 1], then the steady-state error due to a constant disturban
ce is zero.
)()()()( zCzCzRzE
)()(
1)( zN
zGzE
D

60
5.3 Steady-state analysis
where ĜD(z) does not involve any zeros at z = 1.
1
1 1
1 1
( )1
111
1
11
( )lim 1 ( ) lim 1
( )
1lim 1
( )1
1lim 0
ˆ ( )
ss z zD
NN z
z
zD
zD
N ze z E z z
G z
Nz
G zz
z N
G z z
1
1
1
)(ˆ
1
)(ˆ)(
z
zzG
z
zGzG DD
D

61
5.3 Steady-state analysis
Remark:
1. If a linear system is subjected to both the reference input and a d
isturbance input, then the resulting error is the sum of the errors
due to the reference input and the disturbance input. The total e
rror must be kept within acceptable limits.
(1) Suppose N(z)=0, essr can be obtained using the above method.
(2) Suppose R(z)=0, essn can be obtained using the above method.
(3) So at last ess=essn+essr.

62
5.3 Steady-state analysis
2. The point where the disturbance enters the system is very import
ant in adjusting the gain of GD(z)G(z). For example, consider the
system shown in Fig. 5.12(a) and (b), their closed-loop pulse tra
nsfer function for the disturbance are
)()(1
1
)(
)(
)(
)(
zGzGzN
zE
zN
zC
D
)()(1
)()(
)(
)(
)(
)(
zGzG
zGzG
zN
zE
zN
zC
D
D

63
5.3 Steady-state analysis
Figure 5.12 (a) Digital closed-loop control system subjected to reference input
and disturbance input; (b) digital closed-loop control system where the
disturbance enters the feedback loop.
C(z) R(z) = 0
_ GD(z) G(z)
N(z)
(a)
(b)
C(z) R(z) = 0
_ GD(z) G(z)
N(z)

64
5.4 Dynamic analysis
Considering the Fig. 5.9
The z transform of the output of the system is
where (z) is the z pulse transfer function of the closed-loop control
system.
1)()()()(
z
zzzRzzY

65
5.4 Dynamic analysis
n
ii
m
jj
n
m
ni
mj
n
m
nn
nn
mmm
m
pz
zz
a
b
pzpzpzpz
zzzzzzzz
a
b
azazaza
bzbzbzb
zq
zpz
1
1
21
21
011
1
0111
)(
)(
))...().....()((
))...().....()((
...
...
)(
)()(
where n > m. When there is no multiple roots of the characteristic
equation, Y(z) can be rewritten as
1
1
( )( )
( ) 1 1
( )( )( )where
( ) ( )( 1)i
ni
i i
ii
z z p
B zp z z AzY z
q z z z z p
p z z pp zA B
q z q z z

66
5.4 Dynamic analysis
(1) pi is the positive real number
The transient response for the poles to be positive real number is
Let
then the transient response component of the system is given by
Since |pi| < 1, and therefore < 0. The transient response is the
exponential attenuation curve and is monotonic. If |pi| is smaller, and the
|| is larger, so that the result is that the pole is nearer to the original and
the transient response is faster.
-11
1( ) ( [ ] )
1-
nk k
i ii
y kT B p Z aaz
ipTln
1
kTieB
1
( )n
i
i i
B zY z
z p

67
5.4 Dynamic analysis
(2) pi is the negative real number
The transient response for the poles to be negative real number is
The transient response is the exponential positive and negative
attenuation curve respectively. So the negative roots correspond to high-
frequency oscillation with frequency ωs/2, which is also called ringing.
Ringing period is 2T, frequency is 1/2T, radian frequency is 2π/2T= ωs/2.
1
( )n
ki i
i
y kT B p
1
( )n
i
i i
B zY z
z p
where
k
i iki i k
i i
B p k is evenB p
B p k is odd

68
5.4 Dynamic analysis
(3) pi is equal to zero
For single pole case, it is a one step attenuation. When pi is zer
o, the transient response is the fastest, which is also called dea
dbeat control.
)()( kBkTy ii 1
( )n
i
i i
B zY z
z p

69
5.4 Dynamic analysis
(4) Multiple poles case: suppose there are m poles p
( remark: )
For |p|<1 p 0,
12211
1 )(
)(
)(
)(
)1(
)1(
1
1
)(
)()(
mm pz
zza
pz
zza
q
p
zzq
zpzY
122
111)( kmkm pkapkakTy
,...2,1,1
}{1
11
k
pz
zpZ k
- 21
11
)1(}{
pz
zkpZ k
-
1 12 1
1 3
(1 ){ }
(1 )k z pz
Z k ppz
-
,...3,2,1,0)
1(
lim1
i
p
ka
k
imi
k

70
5.4 Dynamic analysis
For 0<p<1 , the response is monotonic exponential attenuation
curve.
For -1<p<0 , the response is a high-frequency oscillation attenu
ation curve with frequency s/2.
For p=0, e.g., two poles system,
M multiple poles imply a m steps attenuation.
)()1()( 21221 kakakTyaz
za

71
5.4 Dynamic analysis
(5) The poles are a pair conjugate complex number
where
and the similar transient response is
ii pz
ii
pz
ii zzq
pzzp
zzq
pzzpa
)1)((
))((arg
)1)((
))((
ii
i
jii
jii
jiii
eppepp
eaaa
||,||
,
1
1
iii
k
ii
jkk
ij
ijkk
ij
i
k
ii
k
iiii
kpa
epeaepea
papakTykTy
iiii
0cos2
)()( 111

72
5.4 Dynamic analysis
The transient response is periodic damping oscillation form. The
more closed to the origin the pole is, the faster attenuation is.
The larger i is (T: 0 /2 ), the more intensely oscillation
does (oscillation frequency 0 s/4 s/2).

73
5.4 Dynamic analysis
Summary
1. System with poles in the unit circle corresponds to attenuation
curve (stable).
2. Positive real pole corresponds to monotonic response Negative
real pole corresponds to high-frequency oscillation with
frequency s/2.
3. The more the pole closed to the origin is, the faster attenuation
is, when poles are on the origin, the transient response is the
fastest, which is also called deadbeat control.
4. The larger i is (T: 0 /2 ), the more intensely oscillation
does (oscillation frequency : 0 s/4 s/2).

74
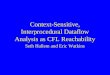
5.4 Dynamic analysis
So we have the Fig. 5.13. If
we desire to get the better
transient response (better
performance), the poles of
the closed-loop pulse-
transfer-function should
locate in the right half of unit
circle on z plane, and near
the real axis and origin.
Figure 5.13 The relationship between the transient
response and the poles location

75
5.5 Controllability, reachability, observability, detectability1. Whether it is possible to steer a system from a given initial state t
o any other state.
2. How to determine the state of a dynamic system from
observations of inputs and outputs.
5.5.1 Controllability and Reachability
Consider the system
(5.17)
Assume that the initial state x(0) is given.
)()(
)()()1(
kCxky
kukxkx

76
5.5 Controllability, reachability, observability, detectability The state at time n, where n is the order of the system, is given
by
(5.17)
If Wc has rank n, then it is possible to find n equations from whic
h the control signals can be found such that the initial state is tra
nsferred to the desired final state x(n).
Remark: The solution is not unique if there is more than one inp
ut signal.
1
1
( ) (0) (0) ( 1) (0)
[ ]
[ ( 1) (0)]
n n nc
nc
T T T
x n x u u n x WU
where
W
U u n u

77
5.5 Controllability, reachability, observability, detectabilityControllability:
The system (5.17) is controllable if it is possible to find a control
sequence can be found such that the origin can be reached fro
m any initial state in finite time.
Reachability:
The system (5.17) is reachable if it is possible to find a control s
equence such that an arbitrary state can be reached from any in
itial state in finite time.

78
5.5 Controllability, reachability, observability, detectabilityTheorem 5.4 REACHABILITY
The system in (5.17) is reachable if and only if the matrix Wc ha
s rank n.
e.unreachabl is system the11
11
)(1
1)(
10
01)1(
cW
kukxkx
e.unreachabl is system the25.05.0
5.01
)(5.0
1)(
025.0
11)1(
cW
kukxkx

79
5.5 Controllability, reachability, observability, detectabilityRemark:
1.The matrix Wc is usually referred to as the controllability matrix
because of its analogy with continuous-time system.
2.The reachability of a system is independent of the coordinates.
TTTnc
cnnn
unuUW
UWxnuuxnx
)0(...)1(,...
)0()1()0()0()(
1
1
cnn
c TWTTTTTTTW 1111 ...~~
...~~~~

80
5.5 Controllability, reachability, observability, detectability3. Controllability and reachability are equivalent if is invertible. Otherwise,
controllability does not imply reachability.
Example: The system (5.17), where
The system is reachable because has rank 2 , that is it
has full rank. But when
We know the system is not reachable, but is controllable, because , the
origin is reached in two steps for any initial condition by using u(0) = u
(1) = 0.
0
1,
01
00
10
01cW
1
0,
01
00

81
5.5 Controllability, reachability, observability, detectabilityExample: Determine the system is controllable or not.
(1)
)(10)(
)(368.0
632.0)(
1632.0
0368.0)1(
kxky
kukxkx
2767.0368.0
2326.0632.0
767.0
2326.0
368.0
632.0
1632.0
0368.0
rankABBrank
AB
The system is controllable.

82
5.5 Controllability, reachability, observability, detectability(2)
)(01)(
)(8.0
1)(
116.0
10)1(
kxky
kukxkx
164.08.0
8.01
rankABBrank
The system is not controllable.

83
5.5 Controllability, reachability, observability, detectability5.5.2 Observability and Detectability
UNOBSERVABLE STATES
The states x0≠0 is unobservable if there exists a finite k1≥n-1 such that
y(k) = 0 and u(k)=0 for 0 ≤ k ≤ k1 when x(0) = x0.
Observable: The system in (5.17) is observable if there is a finite k such that knowle
dge of the input u(0), …, u(k-1) and the outputs y(0), …, y(k-1) is suffici
ent to determine the initial state of the system.
Detectability:
A system is detectable if the only unobservable states are such that dec
ay to the origin. That is, the corresponding eigenvalues are stable. The
observability matrix is independent of the coordinates in the same way
as in the controllability matrix.

84
5.5 Controllability, reachability, observability, detectabilityTheorem 5.5 OBSERVABILITY
The system (5.17) is observable if and only if Wo has rank n.
The state x(0) is unobservable if x(0) is in the null space of Wo.
)1(
)1(
)0(
)0(
)0()1(
)0()1()1(
)0()0(
11 ny
y
y
x
C
C
C
xCny
xCCxy
Cxy
nn

85
5.5 Controllability, reachability, observability, detectabilityExample: A system with unobservable state

86
5.5 Controllability, reachability, observability, detectability5.5.3 Kalman’s Decomposition
The state space is partitioned into four parts :
1. reachable and observable,
2. not reachable but observable,
3. reachable and not observable,
4. neither reachable nor observable.
)(00)(
)(
0
0)(
00
000
00
)1(
21
3
1
4442
34333231
22
1211
kxCCky
kukxkx

87
5.5 Controllability, reachability, observability, detectability The pulse-transfer operator of the system is given by
That is, the pulse-transfer operator is only determined by the rea
chable and observable part of the system.
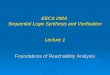
Theorem 5.6 Kalman’s decomposition
A linear system can be partitioned into four subsystems with the
following properties (shown in Fig. 5.14):
11
111 )()( qICqH
subsystemreachablenotandobservableNotS
subsystemreachableandobservableNotS
subsystemreachablenotandobservableS
subsystemreachableandobservableS
ro
ro
ro
or
:
:
:
:

88
5.5 Controllability, reachability, observability, detectability Further, the pulse-transfer function of the system is uniquely
determined by the subsystem that is observable and reachable.
Figure 5.14 Block diagram of the Kalman decomposition when
the system is diagonalizable

89
Summarization
Stability Analysis
The relationship between s-plane and z-plane
-The left half-s-plane -The jw of s-plane
-Periodic strips -Constant attenuation line
-Constant frequency line -Constant damp ratio
Stability definition
-Stability -Asymptotic stability -BIBO stability
Stability test
a. The eigenvalues of
b. The properties of characteristic polynomials (Jury, Rout
h)

90
Summarization
Steady-state analysis
Steady-state response to input signal Static Position Error Constant Static Velocity Error Constant Static Acceleration Error Constant
Steady-state response to disturbances
Dynamic analysis
pi is the negative real number
pi is the positive real number
pi is zero
The poles are a pair conjugate complex number
Controllability, reachability, observability, detectability

91
Homework
1. Determine the range of K when system is stable where
2. Use Jury stability criterion and Modified Routh criterion to
analyze the stability of the system :
03911917745)( 23 zzzzA
Y(s)
R(s)
_ D(z) ZOH G(s)
G(z)
T
kzDTs
sG
)(,1,1
1)(

92
Homework
3. a. T = 0.5, k = 6 and 10, compute the ess respectively;
b. T = 0.5, determine the range of the k for satisfying ess 0.05.
Y(s)
R(s) _ D(z) ZOH G(s)
G(z)
Y(s)
,5.0)(1)(,1
)(,1
1)( tttr
z
kzzD
ssG

93
Homework
4. Determine steady-state error coefficients and steady-state error
when the input is t and t2 respectively, where k =1.
When , determine the interval of the k which sh
ould make ess 0.05.
Y(s)
R(s) _ D(z) ZOH G(s)
G(z)
Y(s)
1.0,)(,)11.0(
1)(
TkzD
sssG
tttr3
1)(1)(

94
Homework

95
Homework

96
Homework

97
Homework

98
Homework