Embed Size (px)
Citation preview

Este cuadernillo:
02 Leyes de Newton, Fuerzas de Inercia
2011
Teoremas de la Dinámica Cinemática
Sistemas de Partículas Ecuaciones Cardinales de la Dinámica
Dinámica del Movimiento Plano Campo de Fuerzas
Oscilador Lineal Unidimensional Función Lagrangiana

Diego E. García Leyes de Newton, fuerzas de inercia 32
Presentación
El presente texto “Teoremas de la Dinámica”, corresponde a una selección de contenidos
tomados del amplio campo de la Mecánica Clásica. Está destinado a los estudiantes de diversas ramas
de Ingeniería, que hayan completado los cursos de Análisis Matemático y de Física. Parte de ellos,
corresponden a las clases Mecánica Analítica (Ingeniería Civil), en el Departamento de Física de la F. de
C.E.F y N. de la UNC, a mi cargo entre 2001 y 2010. El trabajo lo desarrollé a partir de una Mecánica de
nivel intermedio, necesariamente limitado a un curso breve, por las restricciones de tiempo en la
formación de grado en Ingeniería. En este cuadernillo se desarrolla el planteo de la Ecuación Diferencial
de Newton para la partícla libre y vinculada en un campo de fuerzas, se analizan la naturaleza fuerzas de
inercia a partir del Teorema de Coriolis y el Principio de D’Alembert, con la presentación de algunos
ejemplos.
2 Leyes de Newton, fuerzas de inercia Página
Contenido de este cuadernillo
Planteo de la ecuación diferencial de Newton para una partícula en un campo de fuerzas, en un sistema inercial, partícula libre y partícula vinculada
33
Partícula con velocidad inicial en vínculo circular con rozamiento 36
Diversos tipos de fuerzas de rozamiento 39
Resistencia a la rodadura 40
Fuerzas de inercia, conceptos previos 43
Análisis de las fuerzas de inercia, a partir del teorema de Coriolis 44
Determinación de las fuerzas de inercia en partícula en tubo liso en rotación 45
Principio de D´Alembert 48
Centro de masas de un sistema de partículas, definición 50
Derechos reservados. Ley 11723 ISBN 978-987-05-4041-0 Impreso en la ciudad de Córdoba, Argentina 2º edición, marzo 2008 Reimpresiones en 2009, 2010, 2011
Prof. Diego Edgardo García Córdoba, marzo de 2008

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 33
2 Leyes de Newton, fuerzas de inercia
Dinámica de la partícula Con el término “partícula”, expresamos una abstracción, que implica imaginar un punto material
dotado de masa.
Leyes de Newton
Primera ley de Newton: “Todo cuerpo tiende a mantener su estado de reposo, o su movimiento rectilíneo uniforme, en tanto que no le sea aplicada una fuerza, que le haga variar dicho estado”. La primera ley de Newton se conoce también como principio de inercia. Se cumple en un determinado sistema de referencia, que se llama sistema inercial.
Un sistema inercial es aquel que se mueve con un movimiento de traslación rectilíneo uniforme. En sistemas de referencia acelerados, el principio de inercia no se cumple.
Principio de relatividad de Galileo. Establece que: “No es posible determinar el estado de reposo o de movimiento rectilíneo
uniforme de un sistema, mediante cualquier tipo de experiencia mecánica”. Por ejemplo: si un observador que está sobre un sistema inercial, arroja verticalmente hacia arriba un cuerpo, el mismo recorre una trayectoria vertical respecto a dicho sistema, tanto en el ascenso como en el descenso, de la misma forma en que lo haría si el sistema de referencia estuviese quieto.
Segunda ley de Newton. Podemos expresar la segunda ley de Newton, de la siguiente forma:
F ma
F
es la resultante de las fuerzas que obran sobre el cuerpo de masa m y a
es su aceleración. Si
0F es 0a y obtenemos la 1º ley.
Tercera ley de Newton. Si un cuerpo “A”, ejerce una fuerza (acción) sobre un cuerpo “B”, el cuerpo “B” ejercerá sobre el
cuerpo “A” una fuerza igual, pero de sentido contrario ( reacción). Es importante resaltar que, acción y reacción, actúan en cuerpos diferentes. Ejemplo: sobre un
satélite en órbita, actúa una fuerza gravitatoria, que le es ejercida por la tierra (acción). La reacción de esta fuerza, no está en el satélite: está en la tierra.
Planteo de la ecuación diferencial de Newton para una partícula en un campo de fuerzas, en un sistema inercial
Analizaremos la forma en que se plantean las leyes de Newton en el movimiento de una partícula sujeta a fuerzas en un sistema inercial, en dos situaciones diferentes. En primer lugar, consideraremos el movimiento de la partícula “libre”, ello significa no sometida a ninguna condición de vínculo. Por condición de vínculo entendemos todo aquello que obliga a la partícula a seguir determinada trayectoria, por ejemplo el caso en que se mueva sobre una guía. En segundo término, plantearemos las ecuaciones que surgen de aplicar las leyes de Newton, siempre referido a una terna inercial, usando la terna intrínseca.
a) Ecuaciones en el movimiento de la partícula libre
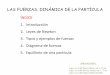
En la figura 1 observamos la trayectoria que describe una partícula P de masa m
no vinculada y
sometida a determinadas fuerzas jF ; la resultante de dichas fuerzas la indicamos con:
R = jj
F
Los ejes corresponden al sistema de referencia inercial X, Y, Z.

Diego E. García Leyes de Newton, fuerzas de inercia 34
De acuerdo con la ley de Newton, podemos escribir:
R m a
Cada uno de los miembros de la igualdad precedente es un vector. Si ahora efectuamos las proyecciones de los mismos sobre cada uno de los ejes resulta:
2
2
2
2
2
2
X
Y
Z
XdmRdtYdmR
dtZdmR
dt
(1)
De esta forma, tenemos las 3 ecuaciones diferenciales (1), cuya integración nos dará las
ecuaciones paramétricas X X t ; Y Y t ; Z Z t .
Para poder efectuar la integración de las ecuaciones (1), será necesario conocer la posición y la velocidad de la partícula en el instante inicial, ya que estas dos condiciones predeterminan la forma que tendrá la trayectoria de la partícula en un determinado campo de fuerzas.
Quiere decir entonces que deberemos tener como datos los valores de las coordenadas de la partícula en el instante, 0t
que son 0X ; 0Y ; 0Z
y las componentes de la velocidad en ese mismo
instante, que son 0Xv ;
0Yv ; 0Zv . Estos datos se conocen como condiciones iniciales.
b) Ecuaciones en el movimiento de la partícula vinculada
En este caso, la partícula está sometida a una condición de vínculo, que la obliga a seguir una determinada trayectoria. Podemos imaginar por ejemplo, un pequeño anillo al cual se le da una velocidad inicial y que desliza, a lo largo de una guía de alambre con forma de curva no plana. En la figura 2 se muestra la trayectoria que sigue la partícula P sobre el vínculo, y se han dibujado, con origen en la propia partícula, los 3 ejes correspondientes al triedro intrínseco, con sus correspondientes versores tangente,
normal y binormal: , n y b respectivamente.
El plano formado por
y n , (rayado en la figura), es el plano en donde está el vector
aceleración a y se llama plano osculador. También se indican en la misma figura:
N : es la reacción que el vínculo ejerce sobre la partícula correspondiente a vínculo liso, es decir, sin rozamiento. En el supuesto que el vínculo ejerciera una fuerza de rozamiento, a dicha fuerza no la
incluiremos dentro de N .Por tal razón, la “reacción de vínculo liso”, N , estará siempre en plano perpendicular a la trayectoria, es decir, sólo tendrá componentes sobre la normal y sobre la binormal, pero no sobre la dirección del la tangente .
X
Z
Y
jF
a
Figura 1
m

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 35
. .act actR F j
j: es la resultante de las fuerzas “activas” que obran sobre la partícula. Por fuerzas
activas entendemos aquellas que no son reacciones de vínculo, es decir. en el caso que estamos
analizando, se excluye la reacción de vínculo liso N . Dentro de estas fuerzas activas incluiremos la fuerza de rozamiento que ejerce el vínculo, si la hubiere.
a
: es la aceleración de la partícula; se encuentra en el plano formado por la tangente y por la normal, por eso no tiene componente en la dirección de la binormal. De acuerdo con la expresión de las componentes intrínsecas de la aceleración (ver expresión (9) de cinemática, definiciones) es:
A continuación, plantearemos las ecuaciones que surgen de aplicar la segunda ley de Newton, en cada una de las direcciones correspondientes a los tres ejes intrínsecos.
Sobre la dirección de la tangente, escribimos, en forma escalar: 2
2. d sact mR dt
(2)
El corchete con el subíndice representa el valor escalar de la proyección de la fuerza resultante en la dirección de la tangente.
La letra s es la longitud medida sobre la trayectoria; obsérvese que en el primer miembro no se ha incluido la reacción de vínculo liso, ya que la misma, como ya se dijo, está en el plano perpendicular a la trayectoria y por lo tanto no tiene componente en la dirección de la tangente.
Sobre la dirección de la normal, escribimos, en forma escalar: 2
. vact N mR nn (3)
Los corchetes con el subíndice representan los valores escalares de las proyecciones de las fuerzas consideradas en la dirección de la normal. En el primer miembro, como se ve, además de la componente de las fuerzas activas, se ha agregado la componente normal de la reacción de vínculo liso;
el segundo miembro,
2
v es el módulo de la componente normal del vector aceleración ( expresión (9) de
cinemática).
Finalmente, sobre la dirección de la binormal, podemos plantear, en forma escalar:
. 0act NR bb (4)
2 2
2
d s va n
dt
.act
F jj
N
X
Y
Z
Trayectoria vinculada
n
s
Figura 2
2 2
2
d s va n
dt
b
m

Diego E. García Leyes de Newton, fuerzas de inercia 36
en el primer miembro de la (4) se tienen las componentes de la resultante de las fuerzas activas y de la reacción de vínculo liso, sobre la binormal; el segundo miembro es cero porque no hay componente del vector aceleración en dicha dirección.
La integración de la ecuación 2
permite encontrar la velocidad y la longitud de trayectoria en
función del tiempo, para lo cual habrá que conocer, la componente tangencial de la resultante de las fuerzas activas, la que, en el caso mas general podrá depender de las coordenadas de la partícula y del tiempo. Será necesario también, tener como dato las condiciones iniciales del movimiento, es decir, la
velocidad inicial 0v
de la partícula y su posición inicial 0s , que en este caso es un determinado valor de
recorrido inicial, medido sobre la trayectoria. Si hubiese fuerza de rozamiento, ésta deberá agregarse en el planteo de la (2). La fuerza de
rozamiento por deslizamiento seco ( o sea sin lubricación), a su vez, depende la reacción normal N que ejerce el vínculo, en cuyo caso también deben intervenir las ecuaciones (3) y (4), porque en éstas
aparece la reacción N . ( consultar la nota 1 sobre diversos tipos de fuerzas de rozamiento) También puede tratarse de un vínculo liso, (es decir, sin la aparición de una fuerza de rozamiento
entre el vínculo y la partícula, dependiente de la reacción normal), pero igualmente existir una fuerza de rozamiento dependiente de la velocidad del cuerpo, por ejemplo el rozamiento con el medio, cuando éste es un fluido viscoso. ( Ver la citada nota 1)
Las ecuaciones (3) y (4), permiten encontrar las componentes de la reacción de vínculo liso, sobre la normal y sobre la binormal; para ello es necesario conocer el radio instantáneo de curvatura ( ), el módulo de la velocidad en función del tiempo, y el valor de las componentes instantáneas de las fuerzas activas en las direcciones de la normal y de la binormal.
Finalmente y como ya se expresó, el planteo de las ecuaciones que se ha formulado, corresponde a un sistema de referencia inercial y las fuerzas que intervienen son fuerzas de interacción.
Es importante, en este aspecto precisar que, si el sistema de referencia fuese no inercial, es decir, acelerado, habría que agregar, a las fuerzas de interacción, las fuerzas de inercia, cuyo análisis se desarrollará en párrafos posteriores.
Ejemplo, planteo de la ley de Newton en el movimiento de una partícula vinculada Una partícula de masa m está sometida a una condición de vínculo que la obliga a seguir una
trayectoria circular de radio R
en un plano horizontal (figura 3). La partícula tiene en un punto O
de la
guía, una velocidad inicial 0
v . El coeficiente de rozamiento cinético entre la masa y la guía circular es .
Plantearemos las ecuaciones que surgen de aplicar la ley de Newton en cada una de las
direcciones correspondientes a las coordenadas intrínsecas dadas por , ,n b .
Las fuerzas activas sobre la partícula son su peso mg y la fuerza de rozamiento cinético f , que si bien proviene de una interacción con el vínculo, la incluimos como fuerza activa. Entonces, la resultante de las fuerzas activas es:
actR mg f
o bien: act
R mgb f (a)
La fuerza reactiva es la reacción de vínculo N , que es la fuerza que le es ejercida a la partícula por el vínculo, supuesto éste liso, ya que la fuerza de rozamiento la hemos incluido como fuerza activa.
O
N
n
c
b
m
mg
f
v
s
Figura 3

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 37
La fuerza de vínculo liso N , de acuerdo con la forma en que la hemos definido, no tiene
componente en la dirección y como ya se indicó anteriormente, está en un plano perpendicular a dicha dirección. La expresamos como: (ver en la figura 3):
n bN N n N b (b)
Plantearemos seguidamente la ley de Newton de acuerdo con las expresiones (2) (3) y (4).
En la dirección de , aplicamos la (2): 2
2
d sf m
dt (c)
En la dirección de n , aplicamos la (3): 2
n
mvN
R (d)
En la dirección de b , aplicamos la (4):
0bmg N (e)
Las expresiones (d) y (e), nos permiten encontrar las componentes de la reacción de vínculo N , que la expresamos de la siguiente forma:
2mvN n mgb
R (f)
El primer término de la (f) es la fuerza centrípeta que la guía ejerce sobre la masa y el segundo término es la reacción de vínculo debida al peso de la partícula.
En cuanto a la (c), ésta nos permitirá plantear la ecuación diferencial para la función que representa la longitud de trayectoria s . Pero para ello, es necesario determinar previamente el valor de la fuerza de rozamiento, que está dado por:
f N . El módulo de la fuerza de vínculo surge de la (f) y vale:
222 mv
N mgR
4
22
vN m g
R
entonces: 4
22
vf m g
R (g)
Como se ve, la fuerza de rozamiento, en este caso, es función de la velocidad, porque cuando varía la velocidad, también varía la fuerza centrípeta que la guía ejerce sobre la masa y por lo tanto varía
el módulo de N . Si reemplazamos el valor de f dado por (g) en (c), resulta:
2 42
2 2
d s vg
dt R
(h)
y también: 4
22
dv vg
dt R (h’)
La integración de la (h’), conduce a la función v f t y a partir de allí, por una segunda
integración se puede llegar a s f t . No desarrollaremos ese cálculo.
No obstante, puede plantearse un artificio para encontrar la longitud de trayectoria recorrida en función de la velocidad, con una sola integración. El artificio consiste en expresar:
dv dv ds
dt ds dt
dv dvv
dt ds

Diego E. García Leyes de Newton, fuerzas de inercia 38
si reemplazamos
dv
dt en (h’) queda:
2 2 4
2
dv g R vv
ds R
2 2 4dv
v g R vds R
2 2 4vdv g R v dsR
pero: 2
2
vvdv d . Entonces, si reemplazamos este valor en la expresión anterior queda:
2
2 2 4
2v
d
dsRg R v
(j)
Integramos ahora ambos miembros de la (j): el primer miembro entre la velocidad inicial 0v
y la velocidad v y el segundo miembro, entre la longitud de recorrido inicial (que vale cero) y la longitud s :
0
2
02 2 4
2v s
v
d vds
Rg R v (k)
El primer miembro de la (k), es una integral de la forma:
2 2
dx
x a en donde 2x v , 2dx d v y 2 2 2a g R (m)
el resultado de esta integral es conocido y resulta ser: 2 2
2 2ln
dxx a x
x a
Por comparación de la (k) con las (m) podemos escribir ahora el resultado de la integral del primer miembro de la (k):
0
22 42 2 2 4 2 2
0 02 2 4ln ln
v
v
d vv g R v v g R v
g R v (n)
Si llevamos el resultado dado por (n), a la (k), se tendrá:
2 42 2 2 4 2 20 0
2ln lns v g R v v g R v
R
y por propiedades de los logaritmos, resulta, finalmente, la siguiente expresión para la longitud de recorrido en función de la velocidad del anillo:
2 42 20 0
2 2 2 4ln
2
v g R vRs
v g R v
Para encontrar la longitud del camino que habrá recorrido la partícula hasta detenerse, hacemos 0v en la expresión anterior, obteniendo entonces:
2 42 20 0
1 ln2
v g R vRs
gR

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 39
Diversos tipos de fuerzas de rozamiento a) El rozamiento por deslizamiento o por resbalamiento seco, se produce cuando un cuerpo se desliza sobre la superficie de otro. Rozamiento seco se denomina a cuando la fuerza de fricción se debe principalmente a la interacción entre las rugosidades propias de las superficies de los cuerpos que rozan. En cálculos aproximados, se puede considerar que el módulo de la fuerza de rozamiento por deslizamiento seco, es directamente proporcional al módulo de la fuerza normal y a un coeficiente ( adimensional) de rozamiento cinético, que depende de la naturaleza de los cuerpos en contacto y no depende del tamaño de la superficie de contacto: roz cinF N
. El término cinético se refiere a que hay
deslizamiento. Este resultado suele designarse como ley de Coulomb del rozamiento seco y a este tipo de rozamiento se lo designa como rozamiento de Coulomb. Se origina en las experiencias llevadas a cabo por Coulomb y Morin en 1781. En alguna bibliografía suele designársela también como ley de Amontons. El rozamiento seco subsiste aún cuando los cuerpos en contacto dejan de deslizar uno sobre otro, en cuyo caso se llama rozamiento de adherencia o rozamiento estático. Esta fuerza de rozamiento de adherencia, es siempre menor ( o a lo sumo igual), que un cierto valor de fuerza de rozamiento
estático máxima: roz estestF N . Podemos citar como ejemplo un bloque que desciende sobre un
plano inclinado rugoso, con velocidad decreciente, hasta detenerse: una vez en reposo, sobre el bloque actúa una fuerza de rozamiento (estática), que equilibra a la componente del peso del bloque en la dirección del plano inclinado. Otro ejemplo en el mismo sentido es el siguiente: si tenemos un bloque unido a un resorte ideal, todo sobre un plano horizontal rugoso y damos al bloque una elongación inicial para luego soltarlo, el bloque se pondrá a oscilar con una fuerza de amortiguamiento coulombiana. Cuando la oscilación finalice y la masa se detenga, no lo hará en la posición de equilibrio (correspondiente a fuerza cero), sino que lo hará en otra posición a una cierta distancia de aquella. Esto significa que hay una fuerza de rozamiento (estática), que equilibra a la fuerza de restitución del resorte. En cambio si repetimos la experiencia con el mismo resorte, pero esta vez con una fuerza de amortiguamiento no coulombiana, sino dependiente de la velocidad, al finalizar las oscilaciones, la masa se detendrá en la posición de equilibrio. b) Rozamiento por deslizamiento o por resbalamiento líquido: se refiere a que hay una capa o lámina de lubricante de un cierto espesor, entre las superficies que deslizan. En este caso la fuerza está dada
por la ley de rozamiento viscoso de Newton: roz liq
AvF
e;
es la viscosidad dinámica del
lubricante, en 2
Ns
m, A
es el área de la superficie de contacto, v
es la velocidad y e
es el espesor
de la capa de lubricante. A su vez, dicho espesor depende de la fuerza normal, a mayor fuerza normal, menor espesor de modo que el rozamiento por deslizamiento líquido también depende, en definitiva, de aquella. c) La resistencia por rodadura, ocurre cuando un cuerpo, de forma cilíndrica o esférica de radio R
rueda sobre una superficie. El efecto de frenado proveniente de la resistencia a la rodadura que el suelo ejerce sobre el cuerpo rodante, se puede representar de 2 formas simplificadas: una de ellas, mediante
una fuerza de frenado por rodadura de valor rod X
NeF
R, aplicada en G
y con momento de frenado
por rodadura nulo, 0rod G. N
es el módulo de la reacción normal y " "e
es un coeficiente que
depende del tipo de materiales en contacto y que se mide en cm . Podemos designarlo como distancia
de momento de rodadura. La otra con un momento de frenado por rodadura rod GNe
y con
fuerza de frenado por rodadura nulo, 0rodX
F . Ambas formas de representar la resistencia a la
rodadura son equivalentes y se analizan con mayor detalle en el artículo siguiente. d) Rozamiento con el medio, o resistencia del medio: se refiere al movimiento del cuerpo en un medio viscoso. Para velocidades relativamente bajas, la resistencia que opone un fluido a un cuerpo que se mueve lentamente en él, está dado por la fórmula de Stokes:
. 6viscF Rv
donde
es la viscosidad dinámica del fluido en 2
Ns
m, R
es el radio en m
del cuerpo (que se lo
supone esférico) y v
es el módulo de su velocidad en m
s. Suele llamarse rozamiento viscoso al caso

Diego E. García Leyes de Newton, fuerzas de inercia 40
en que el módulo de la fuerza de frenado es directamente proporcional a la velocidad. Para velocidades mayores la resistencia del medio depende del cuadrado de la velocidad. Si retomemos el ejemplo de la oscilación elástica de una masa visto en a) de esta nota, en el caso de estar sometida solamente a una fuerza viscosa: como dijimos, al finalizar la oscilación, la masa se detendrá en la posición de equilibrio; es fácil convencerse de ello si pensamos que, la fuerza de restitución del resorte, no permitiría que la masa quede en reposo, fuera de la posición de equilibrio, porque hemos supuesto rozamiento de Coulomb cero. Este hecho marca una diferencia esencial entre la fuerza de rozamiento de Coulomb y la fuerza de rozamiento viscosa.
Resistencia a la rodadura 1) Rodadura en condiciones ideales
En forma previa a definir la resistencia a la rodadura, es conveniente describir la rodadura en condiciones ideales. Consideremos un cuerpo rodante, que puede ser un cilindro, un disco, o una esfera rígida, de masa M
y radio R
que, inicialmente, se encuentra apoyada sobre un plano y en reposo. A
partir de esta condición inicial, suponemos que aplicamos en el centro de la esfera una fuerza F paralela a una recta del plano y que el vínculo es tal que la esfera se pone a rodar sobre dicha recta. Para que pueda ocurrir la rodadura de la esfera sobre la recta del plano, es necesario que en el punto de apoyo exista rozamiento de adherencia o estático (ver el punto a) de la Nota 1): en ese caso la esfera comenzará a rodar y si el rozamiento de adherencia es suficientemente grande, la rodadura se producirá sin deslizamiento en el punto de contacto que, en estas condiciones será centro de rotación de la esfera (punto de velocidad nula). El centro del disco adquiere un movimiento acelerado y en el punto de contacto
de la esfera, aparece una fuerza horizontal de interacción f , (además de la reacción normal N ), que depende del coeficiente de rozamiento de adherencia o estático. En cambio, si el rozamiento de adherencia no es suficiente para impedir el deslizamiento, habrá rodadura con deslizamiento y la fuerza
de interacción f , en esta situación, es la fuerza de rozamiento por deslizamiento o resbalamiento seco o de Coulomb, que depende del coeficiente de rozamiento cinético. Cuando ocurre la rodadura con deslizamiento el centro de rotación de la esfera, ya no está en el punto de contacto. Si no existe
rozamiento (hipótesis de vínculo liso), la esfera, con F
aplicado en su centro, simplemente deslizará
sobre el plano con un movimiento de traslación “puro”, es decir, sin rotación y sin fuerza de interacción f
en el punto de contacto. Supongamos ahora que, en un determinado instante y cuando la esfera está rodando sin deslizar
con un cierto valor de velocidad angular , desaparece la fuerza F : en el caso ideal que la esfera y el plano fuesen perfectamente rígidos e indeformables, la esfera seguiría rodando sin deslizar por inercia, manteniendo constantes su velocidad angular y la velocidad de su centro. Esto es así, porque a partir del
momento en que desaparece F , la resultante de las fuerzas actuantes sobre la esfera es cero
( 0Mg N ). Además Mg
y N
están sobre la misma recta de acción, lo que significa que el momento resultante sobre el cuerpo también es cero. En esta situación de movimiento por inercia es
igualmente cero la fuerza horizontal de interacción en el punto de contacto 0f . 2) Fuerza de resistencia a la rodadura
El supuesto que hemos planteado, de esfera y plano rígidos, indeformables, es ideal. Cuando ocurre la rodadura real, existe deformación y el contacto entre el cuerpo rodante y el plano, ya no es un punto, sino que es una superficie. En la figura 3 siguiente, se presenta una forma simplificada de representar la fuerza que aparece sobre la esfera en la rodadura real.
Figura 3 e
b
a
rodF
rodY
F N
rodX
F
Y
X
O
F
(a)
G
rodX
F
N
C
(b)

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 41
Se supone un cuerpo rodante indeformable, que apoya sobre un plano que se deforma, de
manera tal que la parte del plano en el sentido de avance, sube (ver en la figura 3). A lo largo del arco a b
de contacto entre el suelo y el cuerpo rodante, el suelo ejerce una presión sobre la esfera y por lo
tanto una fuerza a la que llamaremos fuerza de reacción por rodadura.
Esta fuerza pasa por el centro O
de la esfera, la indicamos con rodF
(ver en la figura 3 a) y los
vectores rodY
F
y rod
XF
son sus componentes vertical y horizontal. La componente vertical está
desplazada en el sentido de avance una distancia e y coincide con la reacción normal, rodY
F N .
Esta forma de representar la resistencia a la rodadura es equivalente a las fuerzas N y rodX
F
aplicadas en el centro de masa G
y con 0rod G, tal como se muestra en la figura 3 (b). En
definitiva, equivale a una única fuerza rodX
F en G , porque N se equilibra con el peso.
Calcularemos seguidamente el valor de la componente rodX
F , cuyo sentido se opone al
avance de la esfera y que la podemos considerar como “fuerza de resistencia a la rodadura”. Para ello, si
tenemos en cuenta que el vector rodF
pasa por el centro O , podemos igualar a cero el momento de las fuerzas actuantes con respecto a ese punto. Escribimos entonces:
0rod XF R K Ne K
de donde resulta que el módulo de la fuerza de resistencia a la rodadura vale:
rod X
NeF
R (a)
Su sentido es siempre opuesto el sentido de avance de la esfera. El momento de la fuerza de rodadura con respecto al centro de masa es, como dijimos, cero, pero con respecto al centro de rotación vale:
rodC
NeK con rodY
F N
o bien, en forma escalar:
rod CNe (b)
El sentido de rod C se opone al sentido de la rotación.
La distancia e se llama distancia de momento de rodadura y también podríamos llamarle coeficiente de resistencia a la rodadura. Los siguientes, son algunos valores medios experimentales para la distancia e
(Manual de la academia Hutte del Ingeniero, tomo I, 2º edición en español, editorial Labor 1956):
Rueda y piso de madera: 0,05e cm
Rueda y piso de hierro pulido: 0,005e cm
Podríamos comparar el cociente e
R
de la (a) con el coeficiente cin
de roz cinF N . Para el
caso de una rueda de 5R cm
de hierro pulido sobre un riel del mismo material, es 0,001e
R,
mientras que es 0,15cin , como vemos, e
R es, para ese valor de radio, mucho menor que cin .
Si la esfera se impulsa con una fuerza adecuada hasta alcanzar una velocidad inicial y luego se suprime esa fuerza, terminará deteniéndose por efecto de la fuerza de rodadura (a diferencia del caso ideal en que rodaba indefinidamente por inercia).
Si pretendemos que la esfera mantenga su velocidad constante, tenemos 2 alternativas:
a) Podemos aplicar en el centro de la misma, una fuerza F
de igual módulo y de sentido contrario que
rodX
F : en ese caso la fuerza y el momento resultante con respecto a cualquier punto, serán cero y el
mismo se moverá con velocidad de rotación constante y 0Ga . Si llamamos f
a la fuerza horizontal

Diego E. García Leyes de Newton, fuerzas de inercia 42
que aparece (o que puede aparecer) en el centro C
por causa de la interacción con el suelo, podemos
plantear 0G
e ef N N Ma
R R y por lo tanto, en este caso particular es 0f .
b) Otra alternativa para tener velocidad constante, es aplicar un par de fuerzas (resultante nula), cuyo momento sea de valor Ne : en esta situación el momento resultante con respecto a C
( y en
consecuencia con respecto a cualquier otro punto) será cero y la velocidad de rotación también se mantendrá constante. Pero, en esta situación, en el apoyo aparecerá una fuerza de interacción de valor Ne
R
en el sentido positivo de X , que surge de la siguiente ecuación: 0G
ef N Ma
R
lo cual
implica que e
f NR
. El momento resultante con respecto a cualquier punto del plano, también es
cero. Algunos autores llaman a la expresión (a) “ley de Coulomb para el rozamiento por rodadura”. El
término “rozamiento” está, en general asociado al deslizamiento de un cuerpo sobre otro. En la fuerza de
resistencia por rodadura, ese término no sería demasiado representativo, ya que rodX
F aparece en la
rodadura, con o sin deslizamiento: cuando, además de la rodadura, hay deslizamiento, hay que sumar a la fuerza de resistencia a la rodadura, la fuerza de rozamiento cinético. En rigor, cuando hay deformación de ambos cuerpos, el tramo de la rueda en contacto con el piso se acorta y el tramo de piso de alarga y al proyectar sobre la horizontal esas diferentes variaciones de longitud, aparece un deslizamiento relativo (Manual Hutte, tomo I), pero no es el “deslizamiento” al que se hace referencia en la fuerza de rozamiento
cinético. No obstante “ley de Coulomb para la rodadura” se podría usar por analogía, porque el factor e
R
de la (a) puede tomarse como análogo al coeficiente cin de la fórmula roz cinF N .
3) Momento de resistencia a la rodadura Otra forma de representar en forma simplificada la resistencia a la rodadura, consiste en suponer
que el plano no se deforma y que, en cambio, sí lo hace el cuerpo rodante, como se muestra en la siguiente figura 4:
Con esta representación, la parte de la esfera que apoya es plana. Una forma de interpretar cómo
aparece la reacción N
desplazada en el sentido de avance, es la siguiente : los puntos del perímetro de la esfera correspondientes al tramo C b
(figura 4 a), son puntos que, al avanzar la rueda, van incrementando su deformación, en cambio los puntos del tramo a C
van diminuyendo su deformación, es decir, están en una etapa de restitución elástica de su forma original, aunque esa restitución ocurre con algún atraso en el tiempo con respecto a la desaparición de la causa que provocó dicha deformación. De esta forma, las presiones en el tramo C b
son mayores que las correspondientes al
tramo a C . Esa distribución no uniforme de presiones, provoca que su resultante N
se ubique desplazada, con respecto a la vertical de G y en el sentido de avance, a una distancia e , ver en la figura 4(a). " "e es la distancia de momento de rodadura, algunos de cuyos valores experimentales se indicaron en el párrafo 2).
Con este modelo, la reacción del piso que aparece en la rodadura, no tiene componente
horizontal y coincide con N , sólo que desplazada. La reacción representada en la figura 4 (a) es
G
C
(b)
rod G
N
Figura 4
N
(a
b
C
e
a

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 43
equivalente a aplicar en el centro de masa G
una fuerza N
(aquí es 0rod
XF ) y un momento de
resistencia por rodadura, cuyo valor es (ver en la figura 4 b):
rod GNe (c)
En definitiva, esta forma de describir la resistencia a la rodadura, equivale a un único momento
rod GNe , porque N se equilibra con el peso.
Podemos imaginar el momento de rodadura como un par de fuerzas (resultante nula) aplicado en el cuerpo y de valor Ne Mge . El sentido de este momento, se opone al sentido de la rodadura.
Si la esfera se impulsa con una fuerza adecuada hasta alcanzar una velocidad inicial y luego se suprime esa fuerza, terminará deteniéndose por efecto del momento de resistencia a la rodadura. Si pretendemos que la esfera mantenga su velocidad constante, tenemos 2 alternativas: a) Aplicamos a la esfera un par de fuerzas (resultante cero) y de momento Ne . En este caso el
momento resultante y en consecuencia la aceleración angular, serán cero. La esfera rodará con
velocidad constante. En esta situación particular, no aparecerá una fuerza de interacción horizontal f
en el apoyo, porque no existe ninguna fuerza en la dirección de X .
b) Aplicamos en G
una fuerza F
de valor Ne
R. En este caso, el momento resultante con respecto al
centro de rotación C
será cero, entonces también será cero la aceleración angular y la esfera rodará
con velocidad constante. En esta situación particular, aparecerá una fuerza de interacción horizontal f
en el apoyo, cuyo valor será Ne
fR
, es decir, en el sentido negativo del eje X
(su valor surge de
considerar que la fuerza resultante en la dirección X
debe ser cero). El momento de las fuerzas actuantes con respecto a G también es cero.
4) Conclusiones En resumen, hemos presentado 2 formas simplificadas de representar la resistencia por
rodadura, tomando como polo al centro de masa G : una de ellas con rod X
NeF
R
y 0rod G,
figura 3 (b) (párrafo 2) y la otra con rod GNe y 0rod
XF , figura 4 (b), (párrafo 3).
Es importante tener presente que cualquiera de las dos formas que se presentaron de describir la resistencia a la rodadura, produce la misma aceleración angular y la misma aceleración del centro de masa, ambas de frenado.
En el artículo Teorema del Momento Cinético en el cuerpo plano, ejemplo 2, se confirma esta afirmación y calculan sus valores.
Fuerzas de inercia, conceptos previos Cuando el sistema de referencia no tiene un movimiento de traslación rectilíneo uniforme, sino
que tiene aceleración, como consecuencia de ella, aparecen las “fuerzas de inercia”. Estas fuerzas obran sobre las masas del sistema acelerado y son percibidas por un observador que viaja junto con dicho sistema. Un observador “fijo”, o sea, que no viaje con el sistema no inercial, no percibe dichas fuerzas, no se percata de ellas. (ver Nota 1). Como prueba de ello podemos imaginar la siguiente situación: un observador “A”, está ubicado en una plataforma con ruedas sobre un piso plano horizontal, y frente a él (digamos, a 1 metro), apoyado sobre el piso del móvil, hay un cubo de masa m. El cubo puede, idealmente, deslizar sobre el plano móvil del observador “A”, con rozamiento cero. Un segundo observador, “B”, observa desde fuera, en el sistema “fijo”.
Inicialmente, el carro está quieto, pero en un determinado momento, arranca hacia adelante con
una cierta aceleración a . A la pregunta, ¿qué fuerza actúa sobre el bloque?, cada uno de los observadores dará una respuesta diferente, a saber:
Para el observador fijo, “B”, sobre el cubo no actúa ninguna fuerza, porque, visto desde su sistema, el cubo estaba, y sigue estando quieto después que arrancó el carro (recordar la ausencia absoluta de rozamiento entre el piso del carro y el bloque). Visto desde el sistema fijo, la aceleración del cubo es cero,
entonces, 0F m a .

Diego E. García Leyes de Newton, fuerzas de inercia 44
El observador acelerado “A”, en cambio, ve al bloque acercarse hacia él con una aceleración igual a
a . Entonces, sobre dicho bloque, (y sobre cualquier masa del sistema acelerado), aparece una fuerza
que vale: inF m a . Esta es, precisamente, la “fuerza de inercia”. Veamos algunos ejemplos:
En un ascensor, que baja con una aceleración a , una persona se ve sometida a una fuerza de
inercia ma , en sentido contrario a su peso m g .
En una cápsula que orbita con una trayectoria supuestamente circular alrededor de la tierra, todos los
puntos de la cabina están sometidos a una aceleración centrípeta que vale:2v
gR h
; R es el radio
de la tierra, h la altura de orbitación, v la velocidad. Entonces, los tripulantes estarán sometidos a una
fuerza de inercia, en este caso centrífuga, que vale m g . Esta fuerza de inercia, sumada a la fuerza
gravitatoria m g produce el llamado efecto de “ingravidez”. Para un observador en la tierra, en cambio,
la única fuerza que actúa sobre los tripulantes, es su peso m g .
Hay una fuerza de inercia en particular, que proviene de la denominada “aceleración complementaria”, o “de Coriolis” (Gustavo Coriolis, 1792- 1861), que aparece sobre una masa que se
mueve en un sistema en rotación. Es posible demostrar que esta aceleración vale: 2c ra v ;
es la velocidad angular del sistema no inercial y rv
es la velocidad relativa de una partícula de masa m
con respecto a dicho sistema. La fuerza de inercia de Coriolis vale . .iner cor corF m a . Sobre los cuerpos que se mueven sobre la superficie de la tierra, y como consecuencia de la rotación de ésta, aparece una fuerza de Coriolis. En el hemisferio sur, esta fuerza hace que los cuerpos que se mueven en la superficie, tiendan a desviarse hacia la izquierda, con respecto a su sentido de avance. Por esta razón, se desgaste más la orilla izquierda de un río, o de un canal. Por la misma causa, los ciclones giran en sentido horario en el hemisferio sur. En los párrafos siguientes, se desarrolla una explicación de las fuerzas de inercia con un mayor nivel de generalización, para lo cual será necesario usar el teorema de Coriolis.
Nota 1: El término “fijo”, se ha usado por simplicidad de lenguaje, pero, en realidad, queremos referirnos a un
sistema inercial que, puede estar en reposo, o bien moverse con un movimiento de traslación rectilíneo uniforme. Además, el término “reposo” también es relativo ya que, por ejemplo, si nos referimos como tal a un sistema de referencia solidario a la tierra, ésta, en realidad, tampoco está en reposo. Podría usarse como sistema “en reposo” de referencia, aquel que fuese solidario a las “estrellas fijas”.
Análisis de las fuerzas de inercia, a partir del teorema de Coriolis. (Gustavo Coriolis, 1792-1861).
Ya hemos visto, en el capítulo de cinemática, el teorema de Coriolis dada por la (14) de Cinemática, que repetimos seguidamente
P-O P-O 2O rel rel
aceleracionaceleracióndearrastre decoriolis
a a a v (14)
En lo que sigue, haremos referencia a una partícula de masa m , cuyo movimiento está referido a un sistema con movimiento rototraslatorio, como se muestra en la figura (13) del capítulo de Cinemática.
A partir del teorema de Coriolis, podemos encontrar una expresión para calcular las fuerzas de inercia que actúan sobre una partícula, en tal sistema.
Para ello, multiplicamos por la masa m de la partícula ambos miembros de la (14) y llamamos
arra a la suma de los 3 primeros términos de dicha expresión, con lo cual queda:
a arr rel corma ma ma ma
(5) Sobre la partícula actúan fuerzas de” interacción”, con lo cual queremos decir que son fuerzas
que otros cuerpos ejercen sobre dicha partícula, interactuando con ella. Con estas fuerzas de interacción, se cumple el principio de acción y reacción. Por ejemplo, si la partícula se mueve sobre una trayectoria
Teorema de Coriolis

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 45
vinculada, la fuerza que el vínculo ejerce sobre la masa, es una fuerza de interacción, a la que le corresponde una reacción, que es la fuerza que la masa ejerce sobre el vínculo.
Llamaremos iF a la resultante de estas fuerzas de interacción que obran sobre la partícula.
Entonces podemos escribir:
i aF ma (6)
Ahora reemplazamos el 1º miembro de la (5) por su igual de la (6) y despejamos relma , de lo que resulta:
irel arr corma F ma ma (7)
Interpretemos ahora la expresión (7):
El 1º miembro, relma , es la fuerza que actúa sobre la partícula, vista por un observador situado en el sistema móvil.
El 1º término es la ya vista fuerza de interacción.
El 2º término se llama “fuerza de inercia de arrastre”.
El 3º término es la “fuerza de inercia de Coriolis”.
Si Llamamos “fuerza de inercia”, inF a:
in arr corF ma ma (8)
podemos escribir:
i inrelma F F
(9)
La (9), nos permite expresar la siguiente conclusión: En un sistema no inercial y en particular, en un sistema con movimiento rototraslatorio, además
de las fuerzas de interacción, aparecen las ”fuerzas de inercia”. Estas fuerzas (segundo término de la (9)), se presentan solamente en el sistema no inercial y no
existen para un observador que esté situado en el sistema “fijo” o inercial. El principio de acción reacción, no se cumple para estas fuerzas de inercia, porque no son fuerzas de interacción con otros cuerpos. Retomemos el caso ya explicado del cubo apoyado sin rozamiento sobre un carro con aceleración
arra J : La fuerza de inercia arrmJ , no tiene otra fuerza que sea la “reacción”, porque no proviene de la interacción con otros cuerpos. Algunos autores llaman fuerzas ficticias, o pseudofuerzas, a estas fuerzas de inercia.
Ejemplo, determinación de las fuerzas de inercia en partícula en tubo liso en rotación Consideremos una partícula de masa m que se encuentra en el interior de un tubo liso de masa
M , que se mantiene en un plano horizontal, como se muestra en la figura 5. Las condiciones en el instante inicial, son las siguientes:
El tubo tiene una cierta velocidad de rotación, en sentido antihorario, alrededor de un eje vertical que pasa por O (ver en la figura 5).
La partícula se encuentra sostenida en reposo, a una cierta distancia del eje de rotación. , ,x y z es el sistema de referencia no inercial solidario al tubo y que rota alrededor del eje z (figura 5).
A partir de ese instante inicial, la partícula se suelta y por efecto de la fuerza centrífuga, viaja en
el sentido positivo del eje x , con velocidad relativa al sistema rotante dx
xdt
. La velocidad angular del
tubo es d
dt y va cambiando a medida que la masa se va alejando del origen. En un artículo posterior
(conservación del momento cinético), veremos que la velocidad angular disminuye a medida que la masa
se aleja, pero para esta aplicación, basta saber que
no es constante. La derivada de la velocidad
angular es 2
2
d
dt.
Encontraremos seguidamente, las fuerzas de inercia que actúan sobre la partícula. De acuerdo con la expresión (8), la fuerza de inercia resultante que actúa sobre la masa es:

Diego E. García Leyes de Newton, fuerzas de inercia 46
iner arr corF ma ma (a)
in arr arrF ma es la fuerza de inercia de arrastre y in cor corF ma es la fuerza de inercia de Coriolis. La aceleración de arrastre, de acuerdo con la (14) de teorema de Coriolis, vale:
arr Oa a P O P O (b)
El primer término de la (b) vale cero 0Oa porque el punto O (ver en la figura 5), no se mueve.
El segundo término de la (b) es la aceleración de arrastre centrípeta. Si efectuamos el doble
producto vectorial indicado y tenemos en cuenta que y que P O x , resulta:
2
P O x i (c)
De acuerdo con la (c), el vector aceleración de arrastre centrípeta, apunta siempre hacia el eje de rotación.
En cuanto al tercer término de la (b), es la aceleración de arrastre transversal y si efectuamos el producto vectorial indicado, resulta:
P O x j (d)
En la expresión (d), debe tenerse en cuenta que si es 0 , o sea velocidad angular en
disminución, el vector aceleración de arrastre transversal apuntará en el sentido negativo de j . De acuerdo con la definición de fuerza de inercia de arrastre de la (a) y con las (c) y (d), podemos
expresar ahora la fuerza de inercia de arrastre que actúa sobre la partícula: (ver en la figura 6) 2
in arrF m x i m x j 2
in arrF m x i m x j (e)
El primer término de la (e) es la fuerza de inercia centrífuga, 2
in centrifF m x i . En la figura 6
se ha dibujado este vector en el sentido positivo del eje x porque 2
0 y 0x .
2iner coriolisF m x j
iner transF m x j
z
y
x
O
x i
m
2
iner centrífugaF m x i
Figura 6
O
M
m
y
x
Figura 5
P

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 47
El segundo término de la (e) es la fuerza de inercia transversal, in transF m x j . En la figura 6
se ha dibujado este vector en el sentido positivo del eje “ y ” porque la aceleración angular es 0
y
0x . Volvamos a la expresión (a): su segundo término es la fuerza de inercia de Coriolis:
in cor corF ma
La aceleración de Coriolis, de acuerdo con la (14), de teorema de Coriolis vale 2cor rela v
y
si efectuamos el producto vectorial indicado, resulta que la fuerza de inercia de Coriolis vale:
2in corF m x j (f)
En la figura (4) se ha dibujado el vector in corF
en el sentido negativo del eje “ y ”, porque la
velocidad angular es 0 ( en el sentido positivo del eje z ) y es 0x . Escribamos, finalmente, la resultante de las fuerzas de inercia que actúan sobre la partícula, de
acuerdo con las (a), (e) y (f): 2
2inF m x i m x j m x j (g) Formularemos las siguientes consideraciones con respecto a las fuerzas de inercia obrantes
sobre la masa: Los vectores correspondientes segundo y tercer término de la (g) actúan sobre la partícula en la
dirección normal al tubo y en sentidos opuestos (ver en la figura 6). Con respecto a su resultante, podemos decir que:
Ejerce una fuerza sobre el tubo en forma tal que, si consideramos a éste como “cuerpo aislado”, tiene aplicada una fuerza transversal en la dirección del eje “ "y . A su vez, el tubo ejerce sobre la partícula
una reacción N , en forma tal que: 2 0N j m x j m x j
2N j m x m x j .
La fuerza aplicada en el tubo produce un momento con respecto al eje de rotación, en forma tal que hace variar la velocidad de rotación. Tal como se dijo en la presentación de este problema, en un artículo posterior (conservación del momento cinético), veremos que la velocidad angular disminuye a medida que la masa se aleja. Entonces, el sentido del momento de la fuerza transversal, debe ser “de frenado”, es decir, el sentido de la fuerza resultante transversal debe ser en la dirección negativa del eje “ y ”.
Si pretendiésemos que la velocidad angular se mantuviese constante, en ese caso se haría necesario aplicar en el tubo un momento de igual módulo y de sentido opuesto al momento de frenado. En ese caso, como no habría aceleración angular, la única fuerza que produciría el momento de frenado, sería la fuerza de Coriolis.
Con respecto al primer término de la (g) que, como dijimos, es la fuerza de inercia centrífuga, le confiere a la masa una velocidad en el sentido positivo de x .
Para un observador en el sistema no inercial ,x y , de acuerdo con la (9), las fuerzas que actúan
sobre la partícula son: la fuerza de interacción iF N
y la fuerza de inercia dada por la g . En
cambio, para un observador en un sistema fijo, la única fuerza sobre la partícula es la de interacción N . La ecuación diferencial de Newton, en el sistema rotante y en la dirección x , resulta expresada
de la siguiente forma:
in centrifF m x i 2
m xi m x 2
x x
o bien: 2
0x x (h) En la ecuación diferencial ( )h hay 2 funciones del tiempo que no conocemos, que son y x , de
manera que sería necesaria una segunda ecuación diferencial. En cambio si se mantuviese constante la
velocidad angular del tubo mediante la aplicación de un momento externo, sería 2
cte
y (sólo en ese supuesto), la solución sería de la forma:
x Acosh t Bsenh t

Diego E. García Leyes de Newton, fuerzas de inercia 48
Si las condiciones iniciales fuesen 0x x y 0x , se llegaría a 0A x y 0B , entonces sería:
0x x cosh t
donde
2
t te ecosh t
y la partícula se iría alejando del origen con velocidad
creciente.
El vector velocidad de la partícula relativa al sistema ,x y
es x i , en cambio, con respecto al
sistema “fijo” es v x i x j .
Principio de D´Alembert En la figura 7 se tiene una masa m sobre la cual actúan las siguientes fuerzas:
aF : fuerza activa. Es la resultante de todas las fuerzas que obran sobre la partícula, con excepción de la
reacción que el vínculo ejerce sobre ella. RF : fuerza reactiva. Es la fuerza que el vínculo ejerce sobre la partícula.
De acuerdo con la segunda ley de Newton: a RF F ma
a es la aceleración de la masa m con respecto al sistema inercial (no acelerado) X, Y, Z. El principio de D´Alembert expresa lo siguiente: Si agregamos a las fuerzas actuantes un vector ma , podemos considerar que dicha masa se
encuentra en equilibrio bajo la acción de las fuerzas aF
y RF
y del vector ma , al que llamaremos fuerza de D´Alembert (ver figura 8)
El equilibrio que postula D´Alembert, se expresa entonces como:
0a RF F ma
(10) Ver nota 2
Nota 2: En algunos textos se suele designar como “fuerza de inercia” al vector ma
y como “equilibrio dinámico” al planteado en (10).
En realidad, las fuerzas de inercia como tales, aparecen solamente en los sistemas acelerados (no
inerciales) y están dadas por la (8) del tema fuerzas de inercia: in arr corF ma ma . La aceleración a
que
se indica en la figura (8) y en el equilibrio de fuerzas planteado en (10), es una aceleración “absoluta”, que se refiere a una terna inercial. Por lo tanto, el término ma no es, en rigor, una “fuerza de inercia”
z
y
x
RF
a
aF
m
Figura 7
z
y
x
RF
aF
ma
m
Figura 8

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 49
La (10) es una ecuación vectorial que, si expresamos sus proyecciones sobre los ejes,
obtenemos tres ecuaciones escalares de equilibrio (o eventualmente, dos o una si se trata de un movimiento plano).
Cuando no se trate de una sola partícula, sino de un sistema de n partículas im , será necesario
plantear una ecuación vectorial de equilibrio de fuerzas y otra ecuación vectorial de equilibrio de momentos, con respecto a un punto “O” del espacio o del plano. De manera, entonces, que en el caso de un sistema, se plantean las siguientes ecuaciones de equilibrio de D´Alembert:
1 1 1
0n n n
a Ri i i
i i i
F F ma
(11)
1 1
P -O P -O 0n n
a Ri i i i i
i i
F F ma
(12)
Las fuerzas interiores al sistema de partículas, no las hemos tomado en consideración porque son un sistema con fuerza y momento resultante nulos.
Si se trata de un cuerpo con movimiento plano ( ver definición de movimiento plano en el capítulo de cinemática), para poder plantear las ecuaciones de equilibrio de D’Alembert dadas por las (11) y (12) deberemos usar dos expresiones, que se verán más adelante y que se presentan a continuación:
La primera expresión, es el teorema de la cantidad de movimiento, que se escribe como: e
GR Ma
lo cual nos permite plantear la ecuación de equilibrio de fuerzas de D’Alembert para una placa con movimiento plano, de la siguiente forma:
0eGR Ma
(13)
El primer miembro de la (13) es la resultante de las fuerzas exteriores, y equivale a los dos primeros términos de la (11). El segundo término de la (13) corresponde al último término de la (11),
donde GMa es la fuerza equilibrante de D´Alembert o fuerza auxiliar de D´Alembert
La segunda expresión que usaremos es el teorema del momento cinético para una placa con movimiento bidimensional, que es el siguiente (mas adelante se hará la demostración):
(G-O)eo G GI Ma
e
O es el momento de las fuerzas actuantes sobre la placa con respecto a un punto “O”; Ga
es la
aceleración del centro de masa de la misma y
es su aceleración angular. Hemos usado la letra
cursiva para indicar el vector momento, para diferenciarla de la letra M de imprenta, que está reservada para la masa. GI
es el momento de inercia de las masas del cuerpo, con respecto a la dirección
perpendicular al plano del movimiento que pasa por G (es la sumatoria de los elementos de masa del
cuerpo por los cuadrados de sus respectivas distancias al eje y sus unidades son 2kg m )
A partir de aquí, podemos escribir la ecuación de equilibrio de momentos de D’Alembert para una placa con movimiento plano, de la siguiente manera:
(G-O) 0e
O G GMa I (14)
El primer término de la (14), es el momento resultante de las fuerzas que actúan sobre la placa y equivale al primer término de la (12). Los dos últimos términos de la (14), corresponden al segundo término de la (12) y la suma de estos dos términos es el momento equilibrante de D’Alembert.
Podemos plantear el siguiente ejemplo de aplicación del principio de D’Alembert para una partícula:
Se deja caer una masa m, la que desliza sin rozamiento sobre un tubo de guía de radio R, y que alcanza su velocidad máxima en el punto más bajo.
Plantearemos la ecuación de equilibrio de fuerzas de D´Alembert, para después encontrar la reacción que el vínculo ejerce sobre la masa (ver figura 9).
Si usamos las coordenadas intrínsecas y n podemos expresar:
na a a n
Pero:

Diego E. García Leyes de Newton, fuerzas de inercia 50
2
20
d sa
dt porque max
dsv
dt
entonces: na a n con:
2
maxn
va
R
La ecuación de equilibrio de D´Alembert (10), resulta, entonces, para este caso, en forma vectorial:
0mg N ma
(7)
Todos los vectores de la (7) tienen la dirección del eje n , por lo que podemos escribir, en forma escalar:
2max 0
vmg N m
R
el último término lleva signo menos porque el vector ma es hacia abajo. Por lo tanto, la reacción del vínculo sobre la partícula resulta:
2maxv
N m gR
Centro de masa de un sistema de partículas, definición Consideremos un sistema de partículas, 1 2, ,..., ,...im m m cuyas coordenadas, en el sistema
, ,X Y Z , son , ,i i iX Y Z .
Definimos el centro de masa, de un sistema de partículas, a partir de la siguiente ecuación: (ver figura 10)
1
G-O P -On
i ii
M m
(15)
donde: 1
n
ii
M m
Figura 9
N
a
n
maxv
mg
z
y
x
. G
m1
mi
m2
m3 O
Figura 10

Teoremas de la dinámica Leyes de Newton, fuerzas de inercia 51
El centro de masa también se designa como centro de masas, como baricentro y también como
centro de inercia. El término centro de “masas”, hace referencia a las distintas masas del sistema. El término centro de inercia se refiere a que cuando el cuerpo tiene una aceleración de traslación, la fuerza de inercia está en G( ver fuerzas de inercia). Baricentro viene del griego, baros, peso. Si el campo gravitatorio es uniforme, el centro de masa coincide con el centro de gravedad.
Los vectores P -Oi im son los momentos estáticos de cada una de las partículas im
con
respecto al origen “O”. Si , ,i i iX Y Z
son las coordenadas del vector iP -O , de la expresión vectorial
(15) obtenemos las coordenadas del centro de masas, proyectando ambos miembros sobre cada uno de los ejes:
1
n
i ii
G
m X
MX
1
n
i ii
G
mY
MY (16)
1
n
i ii
G
m Z
MZ
Momento estático baricéntrico:
Se llama así al momento estático con respecto al centro de masas. Por definición de centro de masas, el valor del momento estático baricéntrico es nulo, porque:
1
P -O G-On
i ii
m M
y como “G” coincide con “O”, resulta:
1
P -G 0n
i ii
m (17)

Diego E. García Leyes de Newton, fuerzas de inercia 52

This document was created with Win2PDF available at http://www.win2pdf.com.The unregistered version of Win2PDF is for evaluation or non-commercial use only.This page will not be added after purchasing Win2PDF.