Embed Size (px)
Citation preview

www.sintef.no
s
STF50 A06064 − Åpen
RAPPORT
Sporingsberegning - Grunnlag for revisjon av Håndbok 017
Vilhelm Børnes og Torunn Moltumyr
SINTEF Teknologi og samfunn Veg- og transportplanlegging
Juni 2006





3
INNHOLDSFORTEGNELSE
Forord
1 Bakgrunn ...........................................................................................................................51.1 Typekjøretøy i ny Håndbok 017 .....................................................................................5
1.2 Kjøretøyparametrer som har betydning for sporing........................................................6
1.3 Generelle sporingskrav ...................................................................................................7
1.4 AutoTURN......................................................................................................................7
1.5 Feltforsøk ........................................................................................................................9
2 Sporingssjablonger ..............................................................................................................10
3 Breddeutvidelse i horisontalkurver....................................................................................103.1 Framgangsmåte .............................................................................................................10
3.2 Beregningsresultater .....................................................................................................11
4 Slyng .........................................................................................................................144.1 Bakgrunn.......................................................................................................................14
4.2 Slyng i tidligere utgaver av Håndbok 017 ....................................................................14
4.3 Vurderinger rundt valg av ”brytningsvinkel” i slyng ...................................................15
4.4 Konstruksjon av slyng...................................................................................................16
4.5 Sporingsberegning i AutoTURN ..................................................................................18
4.6 Resultater ......................................................................................................................18
5 Kjøremåter og sporing i T-kryss ........................................................................................245.1 Bakgrunn.......................................................................................................................24
5.2 Gjennomføring..............................................................................................................26
5.3 Forutsetninger ...............................................................................................................26
5.4 Resultat .........................................................................................................................26
5.5 Kommentar til resultat ..................................................................................................31
6 Breddebehov i rundkjøringer .............................................................................................326.1 Bakgrunn.......................................................................................................................32
6.2 Gjennomføring..............................................................................................................33
6.3 Resultat .........................................................................................................................35
6.4 Vurdering og anbefaling ...............................................................................................35
7 Snuplasser .........................................................................................................................367.1 Bakgrunn.......................................................................................................................36
7.2 Gjennomføring..............................................................................................................37
7.3 Forutsetninger ...............................................................................................................37
7.4 Resultat snuplass A-C...................................................................................................38
7.5 Resultat vendehammer..................................................................................................42
8 Busslommer .........................................................................................................................458.1 Bakgrunn.......................................................................................................................45
8.2 Gjennomføring..............................................................................................................46
8.3 Forutsetninger ...............................................................................................................46
8.4 Resultat .........................................................................................................................47
8.5 Kommentar til resultat ..................................................................................................47
8.6 Vurdering og anbefaling ...............................................................................................48
9 Feltforsøk 1 .........................................................................................................................499.1 Innledning .....................................................................................................................49
9.2 Om forsøkene................................................................................................................49

4
9.3 Kjøretøyene...................................................................................................................49
9.4 Utsetting og navnsetting av linjer .................................................................................50
9.5 Plassering av prismer ....................................................................................................50
9.6 Usikkerhet .....................................................................................................................51
9.7 Forsøk med kjøring i 360º sving (forsøk 1) ..................................................................53
9.8 Forsøk med kjøring i 180º sving (forsøk 2) ..................................................................55
9.9 Forsøk med kjøring i 90º sving (forsøk 3) ....................................................................58
9.10 Forsøk med kjøring i T-kryss, høyresving, kjøremåte B (forsøk 5, 6, 8 og 10) ...........60
9.11 Forsøk med kjøring i T-kryss, høyresving, kjøremåte C (forsøk 15) ...........................62
9.12 Forsøk med kjøring i busslomme (forsøk 25 og 26).....................................................64
9.13 Forsøk med kjøring i vendehammer (forsøk 27) ..........................................................65
9.14 Forsøk med kjøring i rundkjøring (forsøk 20 og 21) ....................................................67
9.15 Oppsummering av feltforsøk ........................................................................................71
10 Feltforsøk 2 .........................................................................................................................7210.1 Innledning .....................................................................................................................72
10.2 Kjøretøyene...................................................................................................................73
10.3 Oppmerking og forberedelser. ......................................................................................74
10.4 Gjennomføring av forsøkene ........................................................................................74
10.5 Resultat feltforsøk........................................................................................................75
10.6 Tilsvarende forsøk med AutoTURN.............................................................................76
10.7 Kommentar til resultat ..................................................................................................77
10.8 Konklusjoner.................................................................................................................78
11 Oppsummering.....................................................................................................................78
Litteratur .........................................................................................................................80
Vedlegg 1 - Sporingssjablong for dimensjonerende personbil ...............................................81
Vedlegg 2 – Sporingssjablong for dimensjonerende lastebil ...................................................82
Vedlegg 3 – Sporingssjablong for dimensjonerende vogntog..................................................83
Vedlegg 4 – Sporingssjablong for dimensjonerende buss........................................................84
Vedlegg 5 - Bilder fra feltforsøk 1, Buss....................................................................................85
Vedlegg 6 - Bilder fra feltforsøk 1, Vogntog .............................................................................86
Vedlegg 7 – Andre bilder fra feltforsøk 1..................................................................................87

5
1 Bakgrunn
1.1 Typekjøretøy i ny Håndbok 017
Et typekjøretøy er et kjøretøy med fastsatte dimensjoner og parametre. Hvert typekjøretøy er
representativt for en kategori av kjøretøy og benyttes som en del av dimensjoneringsgrunnlaget i
Håndbok 017. Det opereres med følgende typekjøretøy i de norske vegnormalene:
Personbil (P)
Lastebil (L)
Buss (B)
Semitrailer (ST) – benyttes ikke i ny Håndbok 017
Vogntog (VT)
Vi har i dette prosjektet tatt utgangspunkt i typekjøretøyene slik de er definert i høringsutgave til
ny Håndbok 017 [8]. I ettertid er det bestemt følgende endringer som vi har tatt hensyn til:
Vogntog skal ha bredde 2.60 m.
Buss skal ha svingmulighet på bakerste boggiaksel.
For alle typekjøretøy er dimensjonerende svingeradius relatert til ytre hjørne foran på
kjøretøyet og ikke til ytre forhjul.
Typekjøretøy i ny Håndbok 017 [8] er skissemessig vist i Figur 1.
Figur 1 Typekjøretøy i ny Håndbok 017
Tabell 1 gir oversikt over utformings- og kjøretøyparametrer for de ulike dimensjonerende
typekjøretøyene.

6
1.2 Kjøretøyparametrer som har betydning for sporing
Arealbehovet ved kjøring i kurver beregnes ut fra forholdsvis enkle geometriske formler.
Parametre som inngår i disse beregningene er forklart i dette kapitlet. Noe av forklaringene er
hentet fra AutoTurn sin brukerveileder [12].
Kjøretøyets totallengde, akselavstander, overheng, avstander til krok etc. Kjøretøyets akselavstand virker direkte inn på bredde mellom ytre og indre hjulspor i en kurve.
Med stort overheng foran kommer ytre hjørne foran på bussen langt utenfor ytre hjulspor i kurve.
Stort overheng bak skaper problem i forhold til utsving av bakpart i krappe kurver. For bil med
tilhenger har avstand til krok, avstand fra krok til foraksel på tilhenger, akselavstand og overheng
på tilhenger også betydning for sporingsegenskapene. Figur 4 viser aktuelle lengder som inngår.
Bredde av trekkvogn og henger (Tractor Width/Track og Trailer 1 With/Track): Angir bredde på kjøretøy og evt. tilhenger. Det skilles på karosseribredde og bredde mellom
ytterkant av hjulene på en aksling. Bredden virker direkte inn på sporingsbredde i kurver.
Tid det tar å svinge styrehjulene fra ytterstilling til ytterstilling (Lock to lock time) Angir tiden i sekund en gjennomsnittlig sjåfør under normale kjøreforhold vil bruke for å svinge
styrehjula til et kjøretøy fra den ene ytterstillingen til den andre ytterstillingen. Høy verdi her
kombinert med høy kjørefart medfører at et kjøretøy vil få problem med å klare krappe
svingebevegelser. Hvis det forutsettes at kjøretøyet kan dreie hjulene mens det står i ro, har ikke
denne tiden betydning.
Minimum svingradius (Minimum Turning Radius) Angir minimum svingradius for kjøretøyet. Dette er den radiusen et bestemt punkt på kjøretøyet
akkurat klarer å holde seg innenfor ved vedvarende full sving. ”Centerline” angir at
svingradiusen gjelder midtpunktet på framakselen. ”Curb to curb” angir at svingradiusen gjelder
ytre framhjul. ”Wall to wall” angir at svingradius gjelder ytre hjørne foran på kjøretøyet
(karosserihjørne).
Begrensende styringsvinkel (Steering lock angle) Angir den maksimale vinkelen styrehjula (gjennomsnittsverdi for venstre og høyre hjul) kan ha.
Vinkelen måles i forhold til kjøretøyets lengderetning (vinkel A på Figur 2).
Figur 2 Styringsvinkel

7
Maksimal styringsvinkel kan beregnes ut fra minimum svingradius, akselavstand, overheng foran
og bredde av kjøretøyet.
Maksvinkel mellom bil og tilhenger (articulating angle) Angir begrensende vinkelforskjell mellom trekkvogn og tilhenger.
Svingmulighet på bakerste boggiaksel En del busser har styringsmulighet på bakerste boggiaksel. Sporingsforløp vil i slike situasjoner
bli omtrent som om kjøretøyet ikke hadde den bakerste akslingen.
1.3 Generelle sporingskrav
”Forskrifter for bruk av kjøretøy” [5] gir føringer for hvor stort sporingsareal det tillates for
kjøretøy på det norske vegnettet. Figur 3 refererer §4-2. pkt 7-10. Disse forskriftene er også
gjengitt i Veglistene [10].
Figur 3 Utklipp fra ”forskrift for bruk av kjøretøy” [5]
Kjøretøyforskriftene [4] gir krav om maks svingradius. Paragraf 22-2 punkt 1 lyder:
”Styreinnretningen må være slik at tilstrekkelig styreutslag oppnås. Minste svingeradius – målt til
ytterste forhjuls spor – må ikke være større enn 12 meter.”
Dimensjonerende typekjøretøy i 017 tilfredsstiller disse sporingskravene.
1.4 AutoTURN
Det har vært en forutsetning for dette prosjektet at EDB-programmet AutoTURN [11] skulle
benyttes. AutoTURN er et CAD basert program som simulerer svingebevegelser for kjøretøy.
Programmet er velegnet i forbindelse med planleggingsoppgaver der en har behov for å
kontrollere arealbehov f.eks i kryssområder.

8
I AutoTURN er det mulig å konfigurere ulike typer kjøretøy. Det finnes predefinerte kjøretøy, bla
ligger dimensjonerende typekjøretøy fra mange lands vegnormaler inne, inkludert kjøretøyene
beskrevet i gjeldende Håndbok 017 [7].
Vi har benyttet versjon 5.0 av programmet.
I AutoTURN defineres typekjøretøyene ved å fylle ut skjermbildene vist i Figur 4. Maksimal
styringsvinkel beregnes i programmet ut fra opplysningene gitt i skjermbildet til høyre i figuren.
Tabell 1 dokumenterer de verdiene som er lagt inn i AutoTURN ved definisjon av
typekjøretøyene.
Tabell 1 Verdier brukt ved definisjon av nye typekjøretøyer i AutoTURN
Personbil Lastebil Buss Vogntog
Lengder kjøretøy [m]
Kjøretøy, totallengde 4,80 12,0 15 22
Trekkvogn, totallengde 4,80 12,0 15 9,30
Trekkvogn, overheng foran 0,90 1,50 2,70 1,50
Trekkvogn, akselavstand (1) 2,80 6,80 7,30 5,50
Trekkvogn, overheng bak 1,10 3,7 4,2 2,30
Trekkvogn, bakaksel – krok (1) 2,20
Trekkvogn, krok – Tilhenger, framaksel - - 4,10
Tilhenger, totallengde - - - 10,20
Tilhenger, overheng foran (1) - - - 1,50
Tilhenger, akselavstand (1) - - - 7,20
Tilhenger, overheng bak (1) - - - 1,50
Bredder kjøretøy [m]
Trekkvogn, bredde 1,80 2,55 2,55 2,60
Trekkvogn, sporbredde 1,80 2,55 2,55 2,60
Tilhenger, bredde - - - 2,60
Tilhenger, sporbredde - - - 2,60
Svingeegenskaper
Svingradius (wall to wall) [meter] 6,0 12 12,5 12,5
Styrevinkel/Steering lock angle [deg] (2) 36,2 42,6 51,6 31,3
Lock to lock time [sek] 6 6 6 6
Articulating Angle [grader] - - - 70
Styring på bakerste boggiaksel Nei Nei Ja Nei
(1): Hvis boggi: lengde regnes til/fra senter boggi.
(2): Angir vinkel på styrehjul når kjøretøyet kjører i sirkel med radius lik svingeradius (wall to wall, dvs hele
kjøretøyet er innenfor gitt sirkel).

9
Figur 4 Kjøretøykonfigurering i AutoTURN
Alle parametrene gitt i Figur 4 har betydning for et kjøretøys sporingsforløp. Forklaring av
parametrene finnes i kapittel 1.2.
Versjon 5.0 av AutoTURN har i utgangspunktet ikke beregningsmetodikk for styring på bakerste
boggiaksel. Vi har imidlertid fått tilsendt en tilleggsmodul hvor dette blir tatt hensyn til. Denne
tilleggspakken har status som foreløpig. Vi tar derfor noe forbehold omkring bruk av denne.
Som et alternativ til bruk av tilleggsmodulen har leverandøren oppgitt at sporingsberegning av
buss med svingmulighet på bakerste boggiaksel kan gjøres ved å legge inn vanlig buss uten boggi
i programmet. Det skal da gis akselavstand fra framaksel til fremste boggiaksel. Vi har gjort en
sammenligning av disse to alternativene. Det viser seg da at ved kjøring i ring med ytre radius
12,5 meter er det forskjell på 30-40 cm på radiene for indre bakhjul. Denne radien blir minst når
tilleggsmodul benyttes.
Dette betyr at beregningene vi har gjort av buss med svingmulighet på bakerste boggiaksel har
innbakt noe ekstra sikkerhet. Avviket er forholdsvis lite når det er svinger mindre enn 180°.
1.5 Feltforsøk
Det er utført to feltforsøk i prosjektet. Begge hadde som formål å utteste kjøretøyenes
sporingsegenskaper.
I det første feltforsøket er det benyttet buss og vogntog. Kjøretøyene kjørte etter oppmålte linjer,
kjøreforløp ble målt inn med totalstasjon. Feltforsøkene ble gjort for å kontrollere beregning mot
virkelig sporing og for å kontrollere reell kjøring mot teoretisk kjøring.
I det andre feltforsøket ble det gjort forsøk med en 15-metersbuss i forhold til
kjøretøyforskriftenes krav til sporing.

10
2 Sporingssjablonger
Vi har benyttet AutoTURN for å konstruere sporingssjablonger for de ulike typekjøretøyene. Vi
benyttet funksjonen Generate template som er skreddersydd for dette formålet. For hver sjablong
vises forløpet til ytre kjøretøyavgrensning, venstre forhjul og høyre bakhjul.
Sjablongene er konstruert ut fra kjøretøyene sine dimensjonerende svingradier. Beregnet sjablong
er basert på ”wall to wall”, dvs. at hele kjøretøyet skal holde seg innenfor angitt svingradius.
Kjøretøyene starter med forhjulene parallelt med kjøretøyets lengderetning. Sjablongene er
konstruert ut fra lav hastighet, dvs. under 15 km/t.
Det er passende med målestokk 1:200 for sjablonger som skal presenteres i A4-format.
Sjablongene er gjengitt i vedlegg 1-4.
3 Breddeutvidelse i horisontalkurver
Figur 16.23 i gjeldende Håndbok 017 [7] viser behov for breddeutvidelse i kurve. Vi har benyttet
AutoTURN for å beregne breddeutvidelser i henhold til nye typekjøretøy.
3.1 Framgangsmåte
Funksjonen Generate corner path i AutoTURN er brukt for å kontrollere breddeutvidelsen i
horisontalkurver med radier mellom 40 og 500 meter for de ulike typekjøretøyene.
Inndata for kjøringene er gitt som vist til venstre i Figur 5. Det er kjørt beregning for 10 ulike
radier for de 4 typekjøretøyene P, L, B og VT. Det er benyttet 90º sving (Sweep=90), da dette er
tilstrekkelig for å oppnå fullt breddeutslag for de aktuelle radiene.
Hastighet har kun betydning for hvor lang strekning som trengs for å dreie hjulene fra
utgangsstilling til den vinkelen som hjulene må ha for å følge gitt kurveradius. 30 km/t er ok i
forhold til alle de kurveradier vi skal teste.
For hver radius tegnes det ut en sporingskurve som vist til høyre i Figur 5. Bredde av spor og
spor + overheng skrives ut på tegningen.

11
Figur 5 Inndata for beregning av breddeutvidelse i kurve
3.2 Beregningsresultater
Sporingsbredde og overheng
Tabell 2 viser resultatene fra sporingsberegningene i AutoTURN for ulike horisontalkurveradier
og typekjøretøy.
Tabell 2 Resultat fra sporingsberegninger i AutoTURN
Kurveradius 40 70 100 125 150 200 250 300 400 500
Overheng+ spor 4,01 3,41 3,17 3,05 2,97 2,88 2,81 2,78 2,73 2,71 VT
Spor 3,79 3,28 3,07 2,97 2,91 2,83 2,78 2,75 2,71 2,69
Overheng+spor 3,81 3,23 3,06 2,96 2,89 2,81 2,75 2,72 2,67 2,65 B
Spor 3,23 2,94 2,83 2,77 2,74 2,69 2,66 2,64 2,62 2,61
Overheng+spor 3,39 3,04 2,89 2,83 2,78 2,72 2,69 2,67 2,64 2,62 L
Spor 3,12 2,88 2,79 2,75 2,71 2,67 2,64 2,63 2,61 2,6
Overheng+spor 1,97 1,9 1,87 1,86 1,85 1,84 1,83 1,82 1,82 1,81 P
Spor 1,9 1,86 1,84 1,84 1,83 1,83 1,82 1,82 1,82 1,81
Sporingsøkning og overheng
Med utgangspunkt i disse verdiene beregner vi sporingsøkning (bs) og overheng (bo).
Sporingsøkning (bs) er lik beregnet maks sporbredde minus kjøretøyets bredde. Overheng (bo) er
lik bredde av ”overheng + spor” minus sporbredde. Tabell 3 viser beregna sporingsøkning og
overheng for de ulike typekjøretøyene.

12
Eksemplet under viser utregning for vogntog, kurveradius = 40 meter:
bo = 4,01 - 3,79 = 0,22, bs = 3,79 – 2,60 = 1,19 meter
Tabell 3 Sporingsøkning og overheng
Sporingsøkning
(bs) 40 70 100 125 150 200 250 300 400 500
VT 1,19 0,68 0,47 0,37 0,31 0,23 0,18 0,15 0,11 0,09
B 0,68 0,39 0,28 0,22 0,19 0,14 0,11 0,09 0,07 0,06
L 0,57 0,33 0,24 0,20 0,16 0,12 0,09 0,08 0,06 0,05
P 0,1 0,06 0,04 0,04 0,03 0,03 0,02 0,02 0,02 0,01
Overheng (bo) 40 70 100 125 150 200 250 300 400 500
VT 0,22 0,13 0,1 0,08 0,06 0,05 0,03 0,03 0,02 0,02
B 0,58 0,29 0,23 0,19 0,15 0,12 0,09 0,08 0,05 0,04
L 0,27 0,16 0,1 0,08 0,07 0,05 0,05 0,04 0,03 0,02
P 0,07 0,04 0,03 0,02 0,02 0,01 0,01 0 0 0
De neste figurene gir en grafisk framstilling av tallmaterialet i Tabell 3. Figur 6 viser
sporingsøkning (bs). Figur 7 viser overhøyde (bo).
Sporingsøkning
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 100 200 300 400 500 600
Horisontalkurveradius
Bre
dd
e [
m]
VT
B
L
P
Figur 6 Grafisk framstilling av sporingsøkning (bs)

13
Overheng
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 100 200 300 400 500 600
Kurveradius
Bre
dd
e [
m]
VT
B
L
P
Figur 7 Grafisk framstilling av overheng (bo)
Total breddeutvidelse
Total breddeutvidelse for vegen beregnes etter formelen
b=2bs+bo+0,15
Verdien 0,15 er et fast styringstillegg. I og med at det godtas at overheng kommer ut over
kjørebanekant på veger uten fortau, regnes overhengbredde kun for kjøring i indre felt. Dersom
sum sporingsøkning og overheng (se Tabell 3) er mindre enn 10 centimeter blir breddeutvidelsen
satt lik null.
Tabell 4 viser totale breddeutvidelser for ulike kurveradier for hvert av typekjøretøyene. Verdiene
er avrundet til nærmeste 10 centimeter.
Tabell 4 Total breddeutvidelse for 2-feltsveger
Breddeutvidelse 40 70 100 125 150 200 250 300 400 500
VT 2,8 1,6 1,2 1,0 0,8 0,7 0,5 0,5 0,4 0,4
B 2,1 1,2 0,9 0,8 0,7 0,6 0,5 0,4 0,3 0,3
L 1,6 1,0 0,7 0,6 0,5 0,4 0,4 0,4 0 0
P 0,4 0,3 0 0 0 0 0 0 0 0

14
4 Slyng
4.1 Bakgrunn
SINTEF er bedt om å oppdatere tabellen som viser kjørefeltbredder i slyng; figur 16.33 i
gjeldende Håndbok 017 [7].
Breddeutvidelse i slyng varierer ut fra radius, hva som er dimensjonerende møtesituasjon
(slyngklasse), vegbredde og vinkel mellom inngående og utgående retning. Breddeutvidelse i
slyng inkluderer samme kantklaring som på rettlinje, dette understrekes i [2]. Det vil si at
differansen mellom kjørefeltbredde på rettlinje og kjøretøybredde legges til beregnet breddebehov
i slyng.
4.2 Slyng i tidligere utgaver av Håndbok 017
I vegnormalene fra 1967 og 1977 ble slyng konstruert ut fra møte mellom dimensjonerende
semitrailer (L = 15 meter B = 2,5 meter) og dimensjonerende personbil (L = 5,0 meter, B = 1,9
meter) eller mellom dimensjonerende lastebil (L = 11 meter, B = 2,5 m) og dimensjonerende
personbil (personbil i ytre felt).
I Håndbok 017 fra 1981 [6] er det innført 4 slyngklasser. Metoden for konstruksjon av slyng ble
også omarbeidet slik at den ble i tråd med forslaget til geometrisk utforming av slyng i SINTEF-
rapport fra 1978 [1]. En nyere SINTEF-rapport fra 1980 [2] omhandler normalforslag for slyng
og kommentarer til denne. Tabellen som viser kjørefeltbredder i slyng er i følge Asbjørn Hovd
utarbeidet med grunnlag i 1967-utgaven av Håndbok 017.
Figur 8 Vegklasser og slyngklasser i 1981-utgaven av Håndbok 017
I gjeldende Håndbok 017 [7] er metoden for konstruksjon av slyng beholdt med eksakt de samme
tabellene som i 1981-utgaven, selv om det nå er definert 6 typekjøretøy, lengden for semitrailer er
økt til 15.5 meter og lengden for personbil er redusert til 4.8 meter.

15
Figur 9 Kjørebanebredder og slyngklasser i gjeldende Håndbok 017
4.3 Vurderinger rundt valg av ”brytningsvinkel” i slyng
De fleste slyng er bygd med retningsforandring (brytningsvinkel) på mellom 150 og 180º. I Figur
10 er det vist hvordan breddebehovet for et vogntog øker med økende retningsendring og
minkende radius. Figuren er laget ut fra sporingsberegninger i AutoTURN for det nye vogntoget
(VT).

16
Breddebehov avhengig av vinkelendring, VT
0 1 2 3 4 5 6 7 8 9
90 grader
150 grader
180 grader
360 grader
Slyng 180 grader, indre felt
Slyng 150 grader, indre felt
Breddekrav slyngklasse 1,
7.0m, indre felt
Bredde [m]
R = 14 R = 20 R = 40
Figur 10 Breddebehov for dimensjonerende vogntog som funksjon av retningsendring og
senterlinjens radius
Vi har valgt å konstruere slyng med retningsendring 180º som grunnlag for kontroll av
kjørefeltbreddene for indre og ytre kjørefelt. Siden slyng sjelden konstrueres med
retningsendringer større enn 180º, vil dette gi konservative verdier for breddebehovet.
4.4 Konstruksjon av slyng
Vi har konstruert 5-6 slyng for hver slyngklasse med radier mellom 12 og 40 m. Figur 16.30 og
16.31 i gjeldende Håndbok 017 [7] er lagt til grunn ved konstruksjon av senterlinjene i slyngen.
Framgangsmåten vi har brukt ved konstruksjon av slyng er illustrert i Figur 11.
R
R
R
R
R
R

17
1. Tegning i Autocad.
Med gitt slyngklasse og
radius finnes R fra figur
16.31 i gjeldende
Håndbok 017 .
2. Bruk av funksjonen
Linjekonstruksjon i
NovaPoint.
Krav til radier og
klotoideparametre for de
ulike slyngklassene er
hentet fra figur 16.30 i
gjeldende Håndbok 017.
Brukte to fastpunkt på
sirkelkurva og ett på hver
rettlinje.
3. Resultat av
linjekonstruksjonen.
4. Opptegning av indre
og ytre kjørefeltkant ut
fra ”reglene” gitt i
gjeldende Håndbok
017.
Figur 11 Framgangsmåte ved konstruksjon av slyng
18
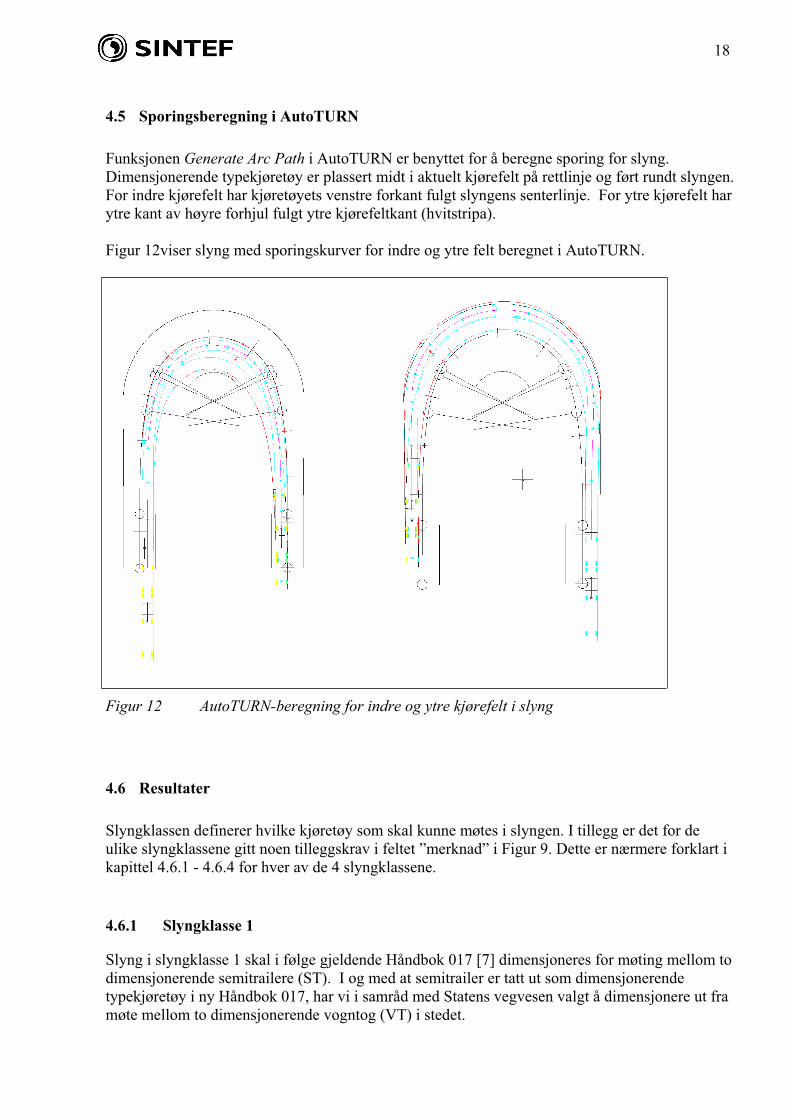
4.5 Sporingsberegning i AutoTURN
Funksjonen Generate Arc Path i AutoTURN er benyttet for å beregne sporing for slyng.
Dimensjonerende typekjøretøy er plassert midt i aktuelt kjørefelt på rettlinje og ført rundt slyngen.
For indre kjørefelt har kjøretøyets venstre forkant fulgt slyngens senterlinje. For ytre kjørefelt har
ytre kant av høyre forhjul fulgt ytre kjørefeltkant (hvitstripa).
Figur 12viser slyng med sporingskurver for indre og ytre felt beregnet i AutoTURN.
Figur 12 AutoTURN-beregning for indre og ytre kjørefelt i slyng
4.6 Resultater
Slyngklassen definerer hvilke kjøretøy som skal kunne møtes i slyngen. I tillegg er det for de
ulike slyngklassene gitt noen tilleggskrav i feltet ”merknad” i Figur 9. Dette er nærmere forklart i
kapittel 4.6.1 - 4.6.4 for hver av de 4 slyngklassene.
4.6.1 Slyngklasse 1
Slyng i slyngklasse 1 skal i følge gjeldende Håndbok 017 [7] dimensjoneres for møting mellom to
dimensjonerende semitrailere (ST). I og med at semitrailer er tatt ut som dimensjonerende
typekjøretøy i ny Håndbok 017, har vi i samråd med Statens vegvesen valgt å dimensjonere ut fra
møte mellom to dimensjonerende vogntog (VT) i stedet.

19
Figur 13 viser beregnet breddebehov for indre og ytre kjørefelt ut fra sporingsberegningene i
AutoTURN sammenstilt med kravene til bredder for slyngklasse 1 i gjeldende Håndbok 017 [7].
Figuren viser at breddebehovet i indre felt og ytre felt er mindre enn breddekravene i håndboken,
men differansen er liten ved kjørefeltbredde 6.5 meter for noen av radiene. For ytre kjørefelt er
også breddebehovet i følge AutoTURN-beregningen mindre enn breddekravene i håndboken for
begge de aktuelle kjørefeltbreddene. For indre felt ligger differansen mellom 10 og 50 centimeter
for kjørefeltbredde 6,5 meter og mellom 40 og 70 centimeter for kjørefeltbredde 7,0 meter.
Slyngklasse 1, møte mellom 2 VT
3
4
5
6
7
8
9
10
10 15 20 25 30 35 40 45
017_Indre felt_6,5 m
017 _Indre felt_7,0 m
Indre felt_6.5 og 7.0 m_spor +
overheng
017_Ytre felt_6,5 m
017_Ytre felt_7.0 m
Ytre felt_6,5 m_spor
Ytre felt_7,0 m_spor
Figur 13 Slyngklasse 1, kjørefeltbredder som funksjon av senterlinjens kurveradius
Tabell 5 viser breddebehovet for slyngklasse 1 ut fra sporingsberegninger i AutoTURN. For de
radiene med tallverdier i kursiv er det ikke kjørt egne sporingsberegninger i AutoTURN, men
sporingsberegningene i AutoTURN og kurveforløpet fra Figur 13 er brukt som grunnlag for å
fastsette disse verdiene.
Tabell 5 Breddebehov for slyngklasse 1 ut fra sporingsberegning i AutoTURN
Radius 12 14 16 18 20 25 30 35 40
Indre felt_6.5 og 7.0 m 8,11 7,41 6,71 6,10 5,77 5,10 4,64 4,30 4,12
Ytre felt_6,5 m 5,40 5,20 5,02 4,85 4,66 4,35 4,05 3,86 3,76
Ytre felt_7,0 m 5,43 5,24 4,98 4,80 4,63 4,30 4,04 3,85 3,71
Tabell 6 gir nye anbefalte breddekrav for slyngklasse 1. Verdiene er sum av
sporingsberegningene fra AutoTURN og kantklaring (avrundet til nærmeste 10 centimeter).
Kantklaring beregnes til 0,65 meter på 6,5 meters veg og 0,9 meter på 7 meters veg. Dette er
basert på vogntogbredde på 2,6 meter.

20
Tabell 6 Foreslåtte breddekrav for slyngklasse 1
Radius 12 14 16 18 20 25 30 35 40
Indre felt_6.5 m 8,8 8,1 7,4 6,8 6,4 5,8 5,3 5,0 4,8
Ytre felt_6,5 m 6,1 5,9 5,7 5,5 5,3 5,0 4,7 4,5 4,4
Indre felt_7.0 m 9,0 8,3 7,6 7,0 6,7 6,0 5,5 5,2 5,0
Ytre felt_7,0 m 6,3 6,1 5,9 5,7 5,5 5,2 4,9 4,8 4,6
4.6.2 Slyngklasse 2
Slyng i slyngklasse 2 skal i følge gjeldende Håndbok 017 [7] dimensjoneres for møting mellom 2
dimensjonerende lastebiler (L). Et tilleggskrav er at dimensjonerende semitrailer (ST) og
dimensjonerende personbil (P) skal kunne møtes.
Figur 14 viser beregnet breddebehov for indre og ytre kjørefelt fra AutoTURN, sammenstilt med
kravene til bredder for slyngklasse 2 i håndboken. Figuren viser at for indre kjørefelt er
breddebehovet ifølge sporingsberegning i AutoTURN mindre enn breddekravene i håndboken
både for kjørefeltbredde lik 5.5 meter og 6.0 meter. For kjørefeltbredde 5.5 meter er beregnet
breddebehov like under kravene, differansen ligger mellom 10 og 15 centimeter. For ytre
kjørefelt er breddebehovet mindre enn breddekravene i håndboken for begge de aktuelle
kjørefeltbreddene, men også for ytre feltet er forskjellen mellom breddebehov og krav minst for
kjørebanebredde 5.5 meter (0-15 centimeter).
Slyngklasse 2, møte mellom 2 L
2
3
4
5
6
7
10 15 20 25 30 35 40 45
017_Indre felt_5,5 m
017 _Indre felt_6,0 m
Indre felt_5.5 og 6,0m_spor +
overheng
017_Ytre felt_5,5 m
017_Ytre felt_6.0 m
Ytre felt_5,5 m_spor
Ytre felt_6,0 m_spor
Figur 14 Slyngklasse 2, kjørefeltbredder som funksjon av senterlinjens kurveradius
Tabell 7 viser breddebehovet for slyngklasse 2 ut fra sporingsberegninger i AutoTURN. For
radiene med tallverdier i kursiv er det ikke kjørt egne sporingsberegninger i AutoTURN, men
sporingsberegningene i AutoTURN og kurveforløpet fra Figur 14 er brukt som grunnlag for å
fastsette disse verdiene.
21
Tabell 7 Breddebehov for slyngklasse 2 ut fra sporingsberegning i AutoTURN
Radius 12 14 16 18 20 25 30 35 40
Indre felt_5.5 og 6,0m 5,80 5,30 5,00 4,70 4,50 4,20 3,90 3,70 3,60
Ytre felt_5,5 m_spor 4,09 3,94 3,84 3,74 3,64 3,45 3,35 3,25 3,15
Ytre felt_6,0 m_spor 4,08 3,91 3,81 3,70 3,57 3,40 3,30 3,20 3,12
Tabell 8 gir nye anbefalte breddekrav for slyngklasse 2. Verdiene er sum av
sporingsberegningene fra AutoTURN og kantklaring, avrundet til nærmeste 10 centimeter.
Kantklaring beregnes til 0,2 meter på 5,5 meters veg og 0,45 meter på 6 meters veg. Dette er
basert på lastebilbredde på 2,55 meter.
Tabell 8 Foreslåtte breddekrav for slyngklasse 2
Radius 12 14 16 18 20 25 30 35 40
Indre felt_5.5 m 6,0 5,5 5,2 4,9 4,7 4,4 4,1 3,9 3,8
Ytre felt_5,5 m 4,3 4,1 4,0 3,9 3,8 3,7 3,6 3,5 3,4
Indre felt_6.0 m 6,3 5,8 5,5 5,2 5,0 4,7 4,4 4,2 4,1
Ytre felt_6,0 m 4,5 4,4 4,3 4,2 4,0 3,9 3,8 3,7 3,6
Tilleggskravet om at ST og P skal kunne møtes i slyngen er kontrollert i AutoTURN. Siden ST
ikke lenger er et dimensjonerende typekjøretøy er det kjørt sporingsberegning med VT i indre felt
og P i ytre felt. Med de nye foreslåtte breddekravene for slyngklasse 2 gir dette bare 25 centimeter
kantklaring innenfor kjørebanebredden. Dette er i minste laget, men trolig vil dette være
tilstrekkelig hvis vi tillater at de også benytter indre skulder.
4.6.3 Slyngklasse 3
Slyng i slyngklasse 3 skal i følge gjeldende Håndbok 017 [7] dimensjoneres for møting mellom
dimensjonerende lastebil (L) og dimensjonerende personbil (P). Slyngen skal konstrueres med L i
indre kjørefelt. Som et tilleggskrav skal dimensjonerende semitrailer (ST) kunne trafikkere
slyngen.
Figur 15 viser beregnet breddebehov for indre og ytre kjørefelt fra AutoTURN, sammenstilt med
kravene til bredder for slyngklasse 3 i gjeldende Håndbok 017 [7]. Figuren viser at
breddebehovet i indre felt er større enn breddekravene i håndboken for kjørefeltbredde lik 5,0
meter. For kjørefeltbredde 5,5 meter er beregnet breddebehov like under kravene, differansen
ligger mellom 5-20 centimeter. For ytre kjørefelt som trafikkeres av P er breddebehovet vesentlig
mindre enn breddekravene i håndboken for begge de aktuelle kjørefeltbreddene. Differansen
ligger mellom 75 og 90 centimeter. Ut fra dette kan det se ut til at breddekravene for indre felt bør
økes og at breddekravene for ytre felt kanskje kan reduseres.
Tilleggskravet om at ST skal kunne trafikkere slyngen er kontrollert i AutoTURN både med nytt
VT, gjeldende VT og gjeldende ST. Alle disse kjøretøyene kan trafikkere slyng konstruert etter
slyngklasse 3 med R=12 med hele kjøretøyet innenfor kjørebanekantene. Kantklaringen for
gjeldende ST er i størrelsesorden 1,9 meter, for gjeldende VT 1,1 meter og for nytt VT i
størrelsesorden 1,4 meter.

22
Slyngklasse 3, møte mellom L i indre felt og P i ytre felt
1
2
3
4
5
6
7
10 15 20 25 30 35 40 45
017_Indre felt_5.0 m
017 _Indre felt_5.5 m
Indre felt_spor + overheng
017_Ytre felt_5.0 m
017_Ytre felt_5.5 m
Ytre felt_5.0 m_spor
Ytre felt_5.5 m_spor
Figur 15 Slyngklasse 3, kjørefeltbredde som funksjon av senterlinjens kurveradius
Tabell 9 viser breddebehovet for slyngklasse 3 ut fra sporingsberegninger i AutoTURN. For de
radiene med tallverdier i kursiv er det ikke kjørt egne sporingsberegninger i AutoTURN, men
sporingsberegningene i AutoTURN og kurveforløpet fra Figur 15 er brukt som grunnlag for å
fastsette disse verdiene.
Tabell 9 Breddebehov for slyngklasse 3 ut fra sporingsberegning i AutoTURN
Radius 12 14 16 18 20 25 30 35 40
Indre felt 5,59 5,23 4,9 4,6 4,39 4,05 3,8 3,6 3,5
Ytre felt 5,0 m 2,28 2,25 2,2 2,17 2,13 2,09 2,05 2,02 1,99
Ytre felt_5,5 m 2,28 2,25 2,2 2,17 2,13 2,09 2,05 2,02 2,01
Tabell 10 gir nye anbefalte breddekrav for slyngklasse 3. Verdiene er sum av
sporingsberegningene fra AutoTURN og kantklaring, avrundet til nærmeste 10 centimeter.
Kantklaring beregnes til 0 meter for lastebil i indre felt og 0,7 meter for personbil i ytre felt når
kjørebanebredden er 5 meter. Tilsvarende verdier for kjørebanebredde 5,5 meter er 0,2 meter og
0,95 meter. Dette er basert på lastebilbredde på 2,55 meter og personbilbredde på 1,80 meter.
Tabell 10 Foreslåtte breddekrav for slyngklasse 3
Radius 12 14 16 18 20 25 30 35 40
Indre felt 5,0 meter 5,6 5,2 4,9 4,6 4,4 4,1 3,8 3,6 3,5
Ytre felt 5,0 meter 3,0 3,0 2,9 2,9 2,8 2,8 2,8 2,7 2,7
Indre felt 5,5 meter 5,8 5,4 5,1 4,8 4,6 4,3 4,0 3,8 3,7
Ytre felt 5,5 meter 3,2 3,2 3,2 3,1 3,1 3,0 3,0 3,0 3,0
Sammenlignet med dagens breddekrav for slyngklasse 3 betyr dette:
Indre felt med kjørebanebredde 5,0 meter: De fleste verdiene øker med 20 centimeter,
resten +10 centimeter.
Indre felt med kjørebanebredde 5.5 meter: Radius 12 meter får ingen økning, de øvrige
radiene + 10 centimeter.
Ytre felt, kjørebanebredde 5.0 meter: De fleste radier -10 centimeter.

23
Ytre felt, kjørebanebredde 5.5 meter: De fleste radier +10 centimeter, noen + 20
centimeter
4.6.4 Slyngklasse 4
Slyng i slyngklasse 4 skal i følge gjeldende Håndbok 017 [7] dimensjoneres for møting mellom to
dimensjonerende personbiler (P). Et tilleggskrav er at dimensjonerende semitrailer skal kunne
trafikkere slyngen med redusert fart.
Figur 16 viser beregnet breddebehovet for indre og ytre kjørefelt fra AutoTURN, sammenstilt
med breddekravene for slyngklasse 4 i gjeldende Håndbok 017 [7]. Figuren viser at
breddebehovet ifølge sporingsberegning i AutoTURN både for indre og ytre felt er vesentlig
mindre enn breddekravene i håndboken. Ut fra dette kan det se ut til at breddekravene både for
indre og ytre felt kan reduseres.
Slyngklasse 4, møte mellom 2 P
1
2
3
4
5
8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42
017_Indre felt_3,0 m
Indre felt_spor + overheng
017_Ytre felt_3,0 m
Ytre felt_spor
Figur 16 Slyngklasse 4, kjørefeltbredder som funksjon av senterlinjens kurveradius
Tabell 11 viser breddebehovet for slyngklasse 4 ut fra sporingsberegninger i AutoTURN. For de
radiene med tallverdier i kursiv er det ikke kjørt egne sporingsberegninger i AutoTURN, men
sporingsberegningene i AutoTURN og kurveforløpet fra Figur 16 er brukt som grunnlag for å
fastsette disse verdiene.
Tabell 11 Breddebehov for slyngklasse 4 ut fra sporingsberegning i AutoTURN
Radius 10 12 14 16 18 20 25 30 35 40
Indre felt 2,54 2,40 2,32 2,25 2,20 2,17 2,10 2,05 2,02 1,99
Ytre felt 2,14 2,09 2,05 2,03 2,01 1,99 1,96 1,94 1,92 1,91
Tilleggskravet om at ST skal kunne trafikkere slyngen med redusert fart er deretter kontrollert i
AutoTURN for radius senterlinje lik 10 meter og kjørefeltbredder i slyngen ut fra gjeldende

24
Håndbok 017 [7]. Dette viser at gjeldende kjørefeltbredder i slyngen ikke er tilstrekkelig til at VT
kan trafikkere slyngen. Dimensjonerende lastebil kan derimot trafikkere slyngen men en
kantklaring lik 1,1 meter.
Vi anbefaler med grunnlag i dette at dagens kjørefeltbredder beholdes for slyngklasse 4 og at
tilleggskravet endres til at dimensjonerende lastebil skal komme fram.
5 Kjøremåter og sporing i T-kryss
5.1 Bakgrunn
I T-kryss kan det være vanskelig å gjennomføre høyresving fra primærveg inn i sekundærveg uten
å måtte kjøre utenfor tiltenkt areal. Venstre hjørne foran på kjøretøyet kan komme over i
motgående kjørefelt i primær og/eller sekundærveg eller høyre bakhjul kan komme utenfor
hjørneavrunding.
I Håndbok 017 opereres det med kjøremåte A, B og C. Figur 17 viser hvordan disse kjøremåtene
arter seg for høyresving fra primærveg til sekundærveg i T-kryss. Figur og beskrivelser er hentet
fra høringsutgave til ny Håndbok 263 [9].
Kjøremåte A. Kjøretøyets karosseri krysser verken senterlinje i primærveg eller sekundærveg ved
høyresving fra primærveg til sekundærveg. Kjøretøyets indre spor krysser ikke hjørneavrunding.
Kjøremåte B. Kjøretøyets karosseri krysser ikke senterlinje i primærveg, men krysser senterlinje i
sekundærveg (gjelder hele kjøretøyet) ved høyresving fra primærveg til sekundærveg.
Kjøretøyets indre spor krysser ikke hjørneavrunding.
Kjøremåte C. Kjøretøyets karosseri krysser senterlinje både i primærveg og i sekundærveg
(gjelder hele kjøretøyet) ved høyresving fra primærveg til sekundærveg. Kjøretøyets indre spor
krysser ikke hjørneavrunding.

25
Figur 17 Kjøremåte A, B og C i T-kryss
SINTEF er bedt om å lage en oversikt over hvilke kjøremåter som er fysisk mulig å gjennomføre
for ulike T-kryss basert på sporingsberegning i AutoTURN. Det skal tas hensyn til
kjørefeltbredder i primær- og sekundærveg og type hjørneavrundingskurve. Kjøremåtene skal
vurderes for alle typekjøretøy.
Figur 18 viser hvilke hjørneavrundingskurver som skal vurderes. Det skal for hver av disse gjøres
vurdering for vegbredde 4.5, 5.5, 6.5, 7.0 og 8.5 meter for både primærveg og sekundærveg.
Figur 18 Hjørneavrundingskurver benyttet i forsøket

26
5.2 Gjennomføring
Vi har foretatt sporingsberegning i AutoTURN for en rekke kombinasjoner av typekjøretøy,
bredde sekundærveg, bredde primærveg og hjørneavrundingskurver. Vi har først prøvd å kjøre
etter kjøremåte A. Det ble kjørt slik at venstre hjørne foran på kjøretøyet tangerte vegenes
senterlinjer mest mulig gjennom hele svingebevegelsen. Dersom indre sporingsavgrensning ikke
krysset hjørneavrundingen vil det si at kjøremåte A var mulig i krysset. Avstanden mellom
sporingskurve for indre avgrensning og hjørneavrunding ble målt og fikk en positiv verdi når
hjulsporet kom innenfor hjørneavrundingen.
Hvis det ikke var mulig å kjøre etter kjøremåte A, ble det forsøkt etter kjøremåte B. Kjøretøyet la
seg da helt inn mot primærvegens senterlinje. Videre ble det svinget inn i sekundærveg slik at
venstre hjørne foran på kjøretøyet tangerte ytre kantlinje i sekundærvegen. Her ble det på
tilsvarende måte målt minste avstand mellom indre sporingskurve og hjørneavrunding. Hvis ikke
kjøremåte B var mulig, ble det forsøkt med kjøremåte C. I noen tilfeller var heller ikke kjøremåte
C mulig.
Det er gjennomført et feltforsøk med 90º sving langs radius på 12,5 meter. Dette tilsvarer
kjøremåte A. Resultatet av dette er vist i kapittel 9.9.
5.3 Forutsetninger
Følgende forutsetninger i forhold til gjennomføring av forsøket må tas i betraktning:
Det er lagt inn 10 centimeter sikkerhetsmargin. Dvs. at hvis et kjøretøy f.eks. klarer å
holde seg 5 centimeter innenfor hjørneavrunding med kjøremåte B, vil det bli definert til å
være 10 centimeter lenger ut, dvs. at det likevel vil bli kjøremåte C.
Det er ved sporingsberegningene benyttet fart på 10 km/t. Ved lavere fart vil det være
mulig å endre rattutslag over kortere strekning. Dette kan medføre mulighet for noe bedre
framkommelighet, men det er svært marginale forskjeller.
Kjøretøyene har samme svingeegenskaper og dimensjoner som typekjøretøyene.
P = Personbil, L = Lastebil, B = Buss, VT = Vogntog
Beregningene baserer seg på at hele kjøretøyet skal være innenfor kjørebanekantene i
forbindelse med svingebevegelsene. I praksis vil det i de fleste tilfeller være mulig å kjøre
med ytre forhjul helt inn mot kjørebanekanten slik at overheng kommer inn over fortau og
lignende. Ved slik kjøring vil framkommeligheten bli atskillig bedre.
5.4 Resultat
Tabell 12 viser hvilken kjøremåte som er mulig for de ulike typekjøretøyene for ulike vegbredder
og hjørneavrundinger.

27
Oppsummeringstabell. Dimensjonerende kjøremåter i T-kryss
Kjørebanebredde primærveg
4.5 5.5 6.5 7.0 8.5
Hjørne-
avrunding
Kjørebanebre
dde
sekundærveg P L B V P L B V P L B V P L B V P L B V
4.5 B - - - -
5.5 B - - C
6.5 A C
7.0 A C
R = 4
Enkelkurve
8.5
4.5 B - - - -
5.5 A C C C
6.5 A C C
7.0 A C
R = 4
2R-R-3R
8.5
4.5 B - - - - - - - - - - - - C
5.5 A C - - C - - C - - C C -
6.5 C C - C C - B C C
7.0 A B C C B C B
R = 6
Enkelkurve
8.5 B B B
4.5 A - - - C - - C - - C - - C
5.5 A C C C C C - B C - B C C
6.5 A B C C B B C B B C
7.0 A B B C B B B
R = 6
2R-R-3R
8.5 B B B
4.5 - - - C - - C - - C - - C
5.5 C C C B C - B C C B C C
6.5 B C C B C C B B C
7.0 B C C B B B
R = 9
Enkelkurve
8.5 B B B
4.5 C C - C C C B C C B C C B B
5.5 C C C B B C B B C B B B
6.5 B B B B B B B B B
7.0 B B B B B B
R = 9
2R-R-3R
8.5 A B B
4.5 C - - C - - B C - B C - B C
5.5 C C C B C C B B C B B B
6.5 B C B B B B B B B
7.0 B B B B B B
R = 12
Enkelkurve
8.5 A B B
4.5 C C C C C C B B B B B B B B
5.5 C C C B B B B B B B B B
6.5 A B B A B B A B B
7.0 A B B A B B
R = 12
2R-R-3R
8.5 A A A
Tabell 12 Oppsummeringstabell for alle dimensjonerende typekjøretøy.
Tabell 13 til Tabell 16 viser i tillegg hvor stor avstand som er målt mellom hjørneavrunding og
indre sporavgrensning for de ulike dimensjonerende typekjøretøyene. I noen tilfeller er det
oppgitt en negativ avstand, det indikerer at sporingskurve kommer utenfor hjørneavrunding for
den kjøremåte som er oppgitt. ** indikerer at det defineres som kjøremåte C pga at kjøretøyets
bakpart svinger over i motgående kjørefelt i primærvegen. Dette er særlig en problemstilling for
buss når det er smal primærveg og krapp avrundingskurve.

28
Tabell 13 Svingebevegelse for Personbil
Dimensjonerende typekjøretøy:
Personbil (P)
Kjørebanebredde primærveg Hjørne-
avrunding
Kjørebanebredde
Sekundærveg 4.5 5.5 6.5 7.0
4.5 C B+30 cm B B
5.5 B+50cm B B
6.5 B B
R = 2
Enkelkurve
7.0 A + 9cm
4.5 C B B B
5.5 B B B
6.5 B A+ 29 cm
R = 2
2R-R-3R
7.0 A + 38cm
4.5 B +18cm B B B
5.5 B A + 5 cm A + 12 cm
6.5 A +55cm A
R = 4
Enkelkurve
7.0 A
4.5 B+50cm B B B
5.5 A+42cm A A + 47 cm
6.5 A A
R = 4
2R-R-3R
7.0 A
4.5 B B B B
5.5 A +34cm A A + 38 cm
6.5 A A
R = 6
Enkelkurve
7.0 A
4.5 A +25cm A A A
5.5 A +75cm A A
6.5 A A
R = 6
2R-R-3R
7.0 A

29
Tabell 14 Svingebevegelse for Lastebil
Dimensjonerende typekjøretøy:
Lastebil (L)
Kjørebanebredde primærveg Hjørne-
avrunding
Kjørebanebredde
sekundærveg 4.5 5.5 6.5 7.0 8.5
4.5 - - - -
5.5 - - C+28cm
6.5 C +110cm
7.0 C
R = 4
Enkelkurve
8.5
4.5 - - - -
5.5 C+30cm C+70cm C+95cm
6.5 C C
7.0 C (B-2cm)
R = 4
2R-R-3R
8.5
4.5 - - - - C+23cm
5.5 C+25cm C C+85cm C
6.5 C C B
7.0 B +22cm B
R = 6
Enkelkurve
8.5 B
4.5 - C +35cm C+60 C+68cm C
5.5 C C B+30cm B
6.5 B +30 B+56cm B
7.0 B +62cm B
R = 6
2R-R-3R
8.5 B
4.5 - C+19cm C C+46cm C
5.5 C B+20 B+50cm B
6.5 B +35 B B
7.0 B B
R = 9
Enkelkurve
8.5 B
4.5 C C B +43i B+65cm B
5.5 C B+40 B B
6.5 B B B
7.0 B B (A+5cm)
R = 9
2R-R-3R
8.5 A +85cm
4.5 C +53cm C B+32u B +38cm B +57cm
5.5 C B+40 B B
6.5 B B B
7.0 B B
R = 12
Enkelkurve
8.5 A +30cm
4.5 C C B B B
5.5 C B +40cm B B
6.5 A+19cm A+21cm A+24cm
7.0 A+44cm A+50cm
R = 12
2R-R-3R
8.5 A
i: Den oppgitte avstanden gjelder ved inngang til hjørneavrundingskurven.
u: Den oppgitte avstanden gjelder ved utgangen til hjørneavrundingskurven.

30
Tabell 15 Svingebevegelse for Buss Dimensjonerende typekjøretøy:
Buss (B)
Kjørebanebredde primærveg Hjørne-
avrunding
Kjørebanebredde
sekundærveg 4.5 5.5 6.5 7.0 8.5
4.5 - - - -
5.5 - - C+1cm C+45
6.5 C+65cm C +95cm C
7.0 C B+7cm
R = 6
Enkelkurve
8.5 B
4.5 - - - -
5.5 C+20cm C+65cm C +78cm C
6.5 C +160cm B +9cm B+60cm
7.0 B+20cm i B
R = 6
2R-R-3R
8.5 B
4.5 - - - -
5.5 C+20cm C +60cm C +60cm C
6.5 C**+40cm C** B+75
7.0 B +8cm B
R = 9
Enkelkurve
8.5 B
4.5 C+39cm C+60cm C+70cm C +77cm (B
+4cm)
B+35cm
5.5 C**+145 B +15cm i B+38cm i B
6.5 B +25cm i B+55cm i B
7.0 B +55cm i B
R = 9
2R-R-3R
8.5 A +6cm
4.5 - C+5cm C+20cm C+30cm C
5.5 C** +90 C** B +45u B
6.5 C** B+55cm i B
7.0 B+55cm i B
R = 12
Enkelkurve
8.5 B
4.5 C**+100 C** B +15cm i B +29cm i B
5.5 C** B B +58cm i B
6.5 B +40cm i B B
7.0 A +0cm A +7cm
R = 12
2R-R-3R
8.5 A +82cm
** Definert som kjøremåte C pga at kjøretøyets bakpart svinger over i motgående kjørefelt i
primærvegen.
i Den oppgitte avstanden gjelder ved inngang til hjørneavrundingskurven.
u Den oppgitte avstanden gjelder ved utgangen til hjørneavrundingskurven.

31
Tabell 16 Svingebevegelse for vogntog
Dimensjonerende typekjøretøy:
Vogntog (VT)
Kjørebanebredde primærveg Hjørne-
avrunding
Kjørebanebredde
sekundærveg 4.5 5.5 6.5 7.0 8.5
4.5 - - - -
5.5 - - - -
6.5 - - C
7.0 C +100cm B+33cm
R = 6
Enkelkurve
8.5 B
4.5 - - - -
5.5 - - C+3cm C +74
6.5 C +61cm C +90cm C
7.0 C B
R = 6
2R-R-3R
8.5 B
4.5 - - - -
5.5 - - C+12cm C +67cm
6.5 C +84cm C C (B-7cm)
7.0 C B
R = 9
Enkelkurve
8.5 B
4.5 - - (C 0cm) C +42cm C +60cm
5.5 C+80cm C C (B0cm) B+47cm
6.5 B+40cm B+67i B
7.0 B+70cmi B
R = 9
2R-R-3R
8.5 B
4.5 - - - -
5.5 C +48cm C+82cm C B+18cm
6.5 B+32cm B+58i B
7.0 B+65cmi B
R = 12
Enkelkurve
8.5 B
4.5 C C B+30cm B+40cm
5.5 B+10cm B+56cm B B
6.5 B063cm i B +84cm i B
7.0 B B (A 0cm)
R = 12
2R-R-3R
8.5 A +75cm
i Den oppgitte avstanden gjelder ved inngang til hjørneavrundingskurven.
u Den oppgitte avstanden gjelder ved utgangen til hjørneavrundingskurven.
5.5 Kommentar til resultat
Som det framkommer av tallmaterialet er det få kombinasjoner som gjør det mulig å kjøre etter
kjøremåte A. For vogntog er det kun ved vegbredde 8,5 meter i både sekundærveg og primærveg
og ved slakest hjørneavrunding det er gjennomførbart med kjøremåte A. Bussen klarer kjøremåte
A i 4 situasjoner, lastebilen i 8 situasjoner, personbilen får først problem ved kurveradier ned mot
4 meter.
Dette viser at krav til kjøremåte har store konsekvenser for utforming av T-kryss.

32
6 Breddebehov i rundkjøringer
6.1 Bakgrunn
Figur 19 og Figur 20 er hentet fra høringsutgaven av Geometrisk utforming av veg- og gatekryss
[9]. Figur 19 viser krav til kjørefeltbredde i sirkulasjonsarealet som funksjon av rundkjøringens
ytre diameter. Figur 20 viser sporingsbredde som funksjon av kjøretøyets kjørekurve.
Figur 19 Kjørefeltbredde i sirkulasjonsarealet som funksjon av rundkjøringens ytre diameter
Figur 20 Sporingsbredde som funksjon av kjøretøyets kjørekurve
SINTEF er bedt om å oppdatere disse 2 figurene siden dimensjonerende typekjøretøy i Håndbok
017 skal endres.

33
6.2 Gjennomføring
Regneark sporing/kapasitet i rundkjøring
En telefonrunde avklarte at grunnlaget for disse figurene er et regneark som Lyder Hole laget i
forbindelse med tillegg til H: ”Utforming av rundkjøringer”[3]. Dette regnearket inneholder
mange ark med data og figurer knyttet til kapasitet i rundkjøringer og sporingsbredder for mange
ulike kjøretøykonfigurasjoner. Regnearket inneholder ikke formelverk for beregning av sporing
for kjøretøy med styring på bakerste boggiaksel. Figur 21 viser arket Diagram-sporingsbredder
fra regnearket.
Figur 21 Ark ”Diagram-sporingsbredder” fra regnearket
Figur 22 viser arket Diagram-sporing innfart-utfart fra regnearket.
Figur 22 Ark ”Diagram-sporing innfart-utfart” fra regnearket
En sammenligning av Figur 19 og Figur 21 viser at disse er identiske med unntak av at
semitraileren er tatt ut fra Figur 19. De samme gjelder Figur 20 og Figur 22. Sammenligner vi
Figur 21 og Figur 22 ser vi at den eneste forskjellen er at verdiene langs x-aksen er forskjellig
(diameter i den ene figuren og radius i den andre).
Vi har lagt inn de nye kjøretøykonfigurasjonene for dimensjonerende vogntog og lastebil i
regnearket. Kjøretøyenes akselavstad, overheng foran, bredde og kjøreradius (ytre fremre hjørne

34
trekkvogn) inngår i beregningen av sporingsbredden for L og B. For VT vil i tillegg overheng bak
på trekkvogn, avstand trekkvogn til fremre hjul henger, akselavstand henger og bredde trekkvogn
inngå i sporingsberegningene.
Siden regnearket ikke direkte kan brukes for busser med styring bak, har vi i regnearket lagt inn
en 13 meter lang buss, men overheng foran lik 2,7 meter og akselavstand lik 7,2 meter. Ifølge
Harald Sehm hos Team trafikk har Nettbuss (Timeekspress) flere slike busser og han mente disse
hadde et arealbehov som var like dårlig om ikke dårligere enn bussene med styring bak.
Sporingsberegningene i regnearket forutsetter at kjøretøyene har oppnådd maksimal sporing.
Sporingsberegninger i AutoTURN
Figur 4 viser prinsippet for hvordan AutoTURN-beregningene er gjennomført. I tillegg til de tre
nye dimensjonerende typekjøretøyene (VT, B, L) er det i AutoTURN definert opp og brukt 2
andre busser:
13,0 meters buss (NettbussTimeekspress)
14,5 meters buss med styring bak (bussen brukt i feltforsøkene)
Det er gjort kun en sporingsberegning for hver av de utvalgte radiene for de 5 kjøretøyene.
For små radier er den påførte sporingsbreddene i AutoTURN opplagt ikke den største (se figuren
under). Vi har derfor måttet måle oss fram til den største sporbredden mer manuelt.
Figur 23 Prinsippskisse for sporingsberegninger i rundkjøring
Feltforsøk
Det er gjort noen feltforsøk med rundkjøring. Disse er beskrevet i kapittel 9.14.

35
6.3 Resultat
Resultater fra regnearket og kjøringene i AutoTURN er sammentilt i Figur 24. De
dimensjonerende typekjøretøyene i gjeldende Håndbok 017 [7] er i figuren vist med stiplet strek
mellom punktene. Nye dimensjonerende typekjøretøy er vist med kontinuerlig strek mellom
punktene. Resultatene fra sporingsberegningene i AutoTURN er vist som enkeltstående punkter
(uten streker mellom).
3
4
5
6
7
8
9
10
11
12,5
13,5
14,5
15,5
16,5
17,5
18,5
19,5
20,5
21,5
22,5
23,5
24,5
25,5
26,5
27,5
28,5
29,5
Radius [m]
Bre
dd
eb
eh
ov [
m]
VT 22m, regneark
VT, Autoturn W-W
B 15m, Autoturn W-W
B 14.5m, Autoturn W-W
B 13m, regneark
B 13m, Autoturn W-W
L 12m, Autoturn W-W
L 12m, regneark
Gjeldende VT 22m
Gjeldende B (12,4 m)
Gjeldende Lastebil - L (11 m)
Gjeldende Semitrailer - ST (15,5 m)
ST,16.5m, regneark
Figur 24 Sammenstilling av resultat fra regnearket med AutoTURN-beregninger
6.4 Vurdering og anbefaling
Med grunnlaget i Figur 24 har vi valgt å beholde kurva for dimensjonerende vogntog. Kurva for
13 meters buss legges til grunn for dimensjonerende buss og 12 meters lastebil legges til grunn for
dimensjonerende lastebil. Begrunnelsen for valgene for dimensjonerende buss og
dimensjonerende vogntog er at sporingskravene (12.5 meter ytre, 5,3 meter indre for buss, 12,5
meter ytre, 2 meter indre for tømmerkjøretøy) da gjenspeiles som nødvendig bredde for
sirkulasjonsareal (12.5-10.5= 2).

36
3,00
4,00
5,00
6,00
7,00
8,00
9,00
10,00
11,00
25 30 35 40 45 50 55 60
Rundkjøringens diameter (m)
Bre
dd
e s
irk
ula
sjo
nsare
al
(m)
Vogntog (typekjøretøy VT)
Buss (typekjøretøy B)
Lastebil (typekjøretøy L)
Figur 25 Forslag til breddekrav for sirkulasjonsareal i rundkjøring
Vi har ikke lagt til ekstra styringstillegg i figuren. I høringsutgaven av kryssveilederen er det
angitt at 0,5 meter skal legges til breddene fra figuren, når det skal dimensjoneres for 50 km/t i
spredtbygde områder.
7 Snuplasser
7.1 Bakgrunn
SINTEF er bedt om å undersøke tre ulike typer sirkulære snuplasser, samt vendehammer i forhold
til framkommelighet og sporing. De sirkulære snuplassene skal vurderes med buss (B) og
vogntog (VT) som dimensjonerende typekjøretøy, mens vendehammer skal vurderes med lastebil
(L) som dimensjonerende typekjøretøy. Det er gjort sporingsberegning med programmet
AutoTURN. For vendehammer er det i tillegg gjort noen feltforsøk.
Det er tatt utgangspunkt i tre ulike varianter av sirkulære snuplasser, disse er vist i Figur 26.

37
Figur 26 Snuplass type A, B og C
Utforming av vendehammer er vist i Figur 27.
Figur 27 Vendehammer
7.2 Gjennomføring
Vi har for hver av snuplassene A-C kjørt 5-10 sporingsberegninger i AutoTURN. Det er foreslått
utforming på bakgrunn av dette. Til slutt er det kjørt 1-2 sporingsberegninger for hver av de
anbefalte løsningene. Det er gjort forsøk med både buss og vogntog.
Disse snuplassene ble ikke testet i feltforsøket.
Det ble foretatt 5-10 AutoTURN-beregninger for vendehammer. Ut fra dette ble det valgt et
forslag til utforming. For denne utformingen ble det på nytt kjørt to sporingsberegninger.
Forsøkene ble gjort med lastebil.
Det er gjort feltforsøk med vendehammer, se kapittel 9.13.
7.3 Forutsetninger
Nedenfor er listet opp noen forutsetninger og kommentarer til gjennomføringen av forsøkene i
AutoTURN.
Det er benyttet funksjonen Generate Arc Path i AutoTURN. Dvs at kjøretøyene ”styres”
vha PC-musen.
Det er noe usikkerhet i forhold til beregning av sporingsforløp for buss med styring på
bakerste boggiaksel (jfr kapittel 1.4).
Det er i disse vurderingene tatt utgangspunkt i at utformingen av snuplassene skal
minimaliseres i forhold til arealbehov samtidig som de enkelte dimensjonerende
typekjøretøyene skal kunne snu uten for store vansker.

38
Tilleggsareal for evt. snøopplagring, snuing av spesialkjøretøy, estetikk, trafikksikkerhet
og lignende er ikke tatt hensyn til spesielt, men det er i anbefalt løsning bygget inn noe
sikkerhetsmargin.
AutoTURN-beregningene er foretatt med dimensjonerende typekjøretøy som beskrevet i
kapittel 1.1
Beregningene i AutoTURN er kjørt med hastighet 10 km/t. Det er også gjort noen forsøk
med lavere fart. Ved liten fart kreves kort strekning for å endre rattutslag, det vil dermed
være mulig med større finmanøvrering.
Det benyttes kjøremåte B. Dvs. kjøretøyene kan svinge over i motgående kjørefelt i
forbindelse med inn og utkjøring av snuplass.
Det må påregnes noe variasjon fra en kjøring til neste. Ulike sjåfører vil også ha ulik
oppfatning av hva som er optimal måte å kjøre på. Ut fra dette er det bygget inn noe
slingringsmonn i de endelige anbefalingene.
Ytre hjørne foran på kjøretøyet skal være innenfor kantstein/vegkant. I praksis vil det som
regel være mulig å legge hjørnet foran på kjøretøyet inn over fortauet om nødvendig.
Dette kan oppveie noe av usikkerheten fra forrige punkt.
I feltforsøket (gjelder vendehammer) ble det benyttet buss med lengde 14,45 meter og
styring på bakerste boggiaksel.
Ved kjøring i vendehammer er det forutsatt at det er mulig å endre styringsvinkel også når
kjøretøyet står i ro.
7.4 Resultat snuplass A-C
I det følgende er det vist foreslåtte minimumsløsninger for snuplassene A-C. For disse
snuplassene er ytre diameter (13 meter) valgt ut fra dimensjonerende svingradius på 12,5 meter +
noe klaring. Radier for inn- og utsving samt indre radier er bestemt ut fra resultat fra flere
sporingsberegninger.
På bakgrunn av minimumsløsningene er det til slutt gitt anbefalinger med noe avrunda verdier.
Snuplass A, buss
Figur 28 viser foreslått minimumsløsning for snuplass type A dimensjonert ut fra
dimensjonerende buss. Figuren viser sporingsberegning for buss med hastighet 10 km/t.

39
Figur 28 Snuplass A, kjøring med buss.
Snuplass A, vogntog
Figur 29 viser foreslått minimumsløsning for snuplass type A dimensjonert ut fra
dimensjonerende vogntog. Figuren viser sporingsberegning for vogntog med hastighet 10 km/t.
Figur 29 Snuplass A, kjøring med vogntog.
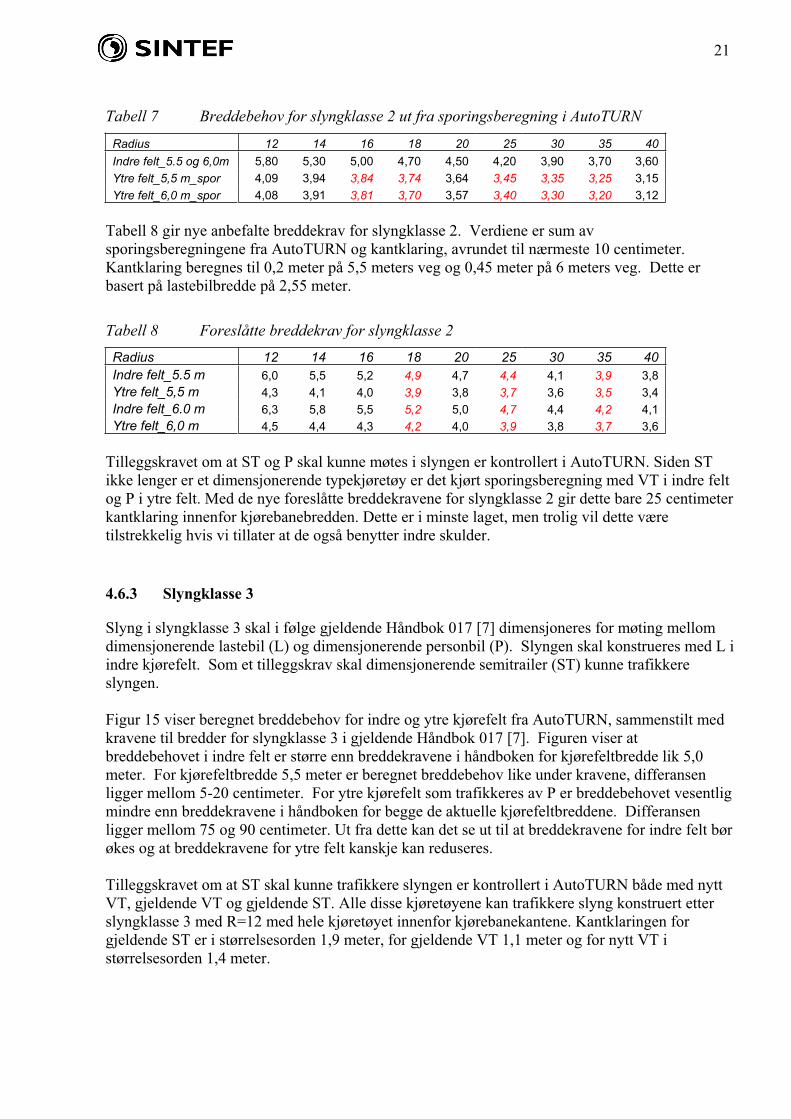
Snuplass B, buss
Figur 30 viser foreslått minimumsløsning for snuplass type B dimensjonert ut fra
dimensjonerende buss. Figuren viser sporingsberegning for buss med hastighet 10 km/t.
40
Figur 30 Snuplass B, kjøring med buss
Snuplass B, vogntog
Figur 31 viser foreslått minimumsløsning for snuplass type B dimensjonert ut fra
dimensjonerende vogntog. Figuren viser sporingsberegning for vogntog med hastighet 10 km/t.
Figur 31 Snuplass B, kjøring med vogntog
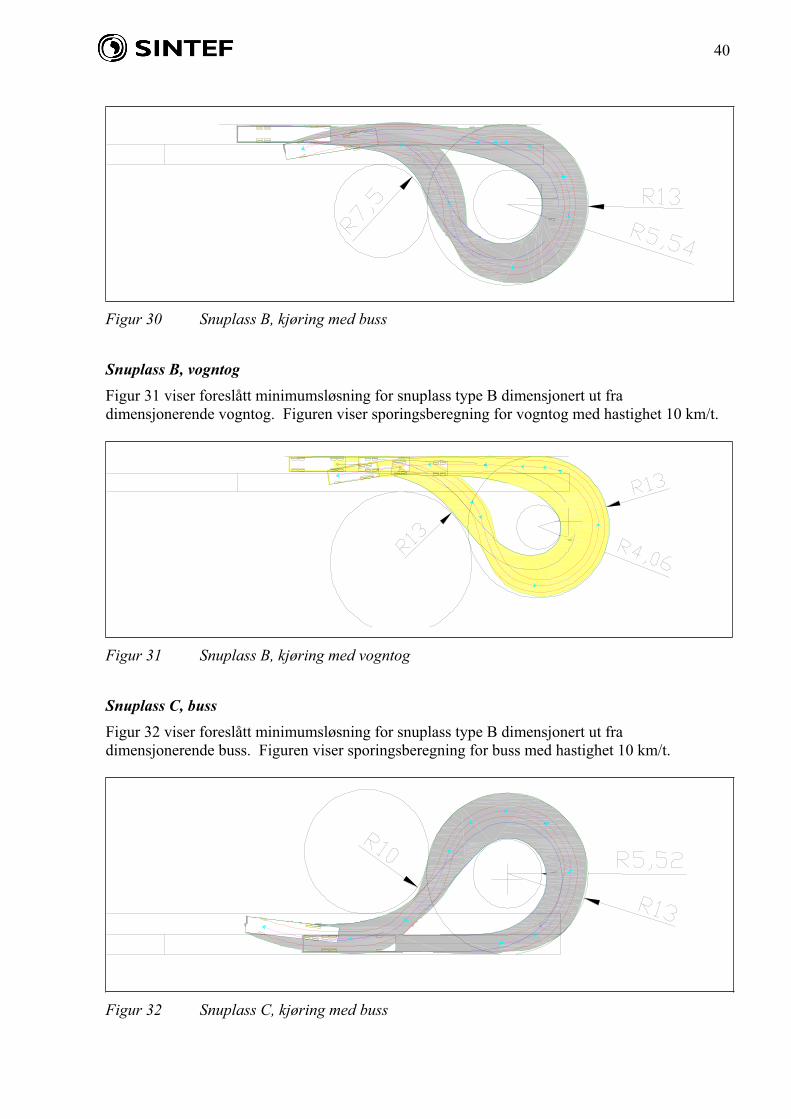
Snuplass C, buss
Figur 32 viser foreslått minimumsløsning for snuplass type B dimensjonert ut fra
dimensjonerende buss. Figuren viser sporingsberegning for buss med hastighet 10 km/t.
Figur 32 Snuplass C, kjøring med buss

41
Snuplass C, vogntog
Figur 33 viser foreslått minimumsløsning for snuplass type B dimensjonert ut fra
dimensjonerende vogntog. Figuren viser sporingsberegning for vogntog med hastighet 10 km/t.
Figur 33 Snuplass C, kjøring med vogntog
Oppsummering og anbefaling
Anbefalingene er i hovedsak gjort ut fra at det er ønskelig å bruke minst mulig areal, samtidig som
de aktuelle kjøretøyene skal kunne snu uten spesielt store problem. Trafikkmengde, estetikk,
drift/vedlikehold, snøopplagring, trafikksikkerhet, anleggskostnader, med mer er ikke vurdert
spesielt. Eventuelle tilleggskrav ved bruk av snuplassene i tunnel er heller ikke vurdert.
Tabell 17 gir oppsummering av sporingsberegningene. Det er vist både minimumsverdier og
anbefalte verdier. Størrelsene R1, R2, R3 og R4 er vist på Figur 34.
Figur 34 Prinsippskisse av snuplass type A, B og C med målsetting.

42
Tabell 17 Resultat av AutoTURN-beregning for snuplasser type A, B og C og anbefalinger
R1 [meter] R2 [meter] R3 [meter] R4 [meter] Snu-
plass
Type
Dim.
kjt. Min Anbefalt Maks Anbefalt Min Anbefalt Min Anbefalt
A Buss 13 13 4,89 4,5 15 15 7.5 10
A Vogntog 13 13 3,62 3,5 20 20 15 15
B Buss 13 13 5,54 5,25 7.5 10 - -
B Vogntog 13 13 4,06 3,75 13 15 - -
C Buss 13 13 5,52 5,25 - - 10 12,5
C Vogntog 13 13 4,25 4,0 - - 10 12,5
Vi anbefaler at R1 settes til 13 meter for alle snuplasstypene. Det er tatt utgangspunkt i at
vogntog og buss er dimensjonert med svingradius 12,5 meter. Det er lagt til 0,5 meter
slingringsmonn utover dette.
R2 anbefaler vi å dimensjonere ut fra restareal ved sporing minus sikkerhetsmargin. Vi har satt
sikkerhetsmargin til ca 25 centimeter. Sentraløya er plassert sentrisk i forhold til den ytre
sirkelen. Selv om det i forhold til sporing er mer optimalt å ha en annen form på sentraløya og
eventuelt flytte den ut av senter, anbefaler vi å ha sentraløya i senter. Dette gjør det enklere ved
utsetting/konstruksjon og det gir kanskje en bedre løsning i forhold til estetikk.
R3 blir satt på noe skjønn ut fra resultatet av spormålingene og innlegging av noe sikkerhets-
margin.
R4 blir satt noe på skjønn ut fra resultatet av spormålingene og innlegging av noe sikkerhets-
margin.
Totalt sett vil snuplass C være lettest å manøvrere gjennom. Her får en ikke kontrakurve før ved
utkjøring.
7.5 Resultat vendehammer
Det er i Figur 35 vist en minimumsløsning for vendehammer dimensjonert ut fra lastebil.

43
Figur 35 Kjøring med lastebil i vendehammer, utforming 1
Vi har tatt utgangspunkt i vegbredder på 5 meter. Avrundingsradier er gitt til å være 8,5 ved
innrygging og minimum 7,5 ved utkjøring. Den enden hvor en kjører fram må være minimum 19
meter. Der vi rygger bak er det tilstrekkelig med 12 meter.
For å illustrere at det er mange mulige løsninger har vi i Figur 36 vist en alternativ utforming av
vendehammer. Også denne er dimensjonert ut fra kjøring med Lastebil.
Figur 36 Kjøring med lastebil i vendehammer, utforming 2
I dette tilfellet er bredde i den delen av vendehammeren som en rygger inn i satt til 7 meter.
Utkjøringsradius er endret til 7 meter.
Feltforsøket med snuing i vendehammer ble gjort med buss (14,45 meter) og er derfor ikke direkte
sammenlignbart med lastebil.
Feltforsøket ble gjort med manuell måling av hvor mye bussen kom utenfor det oppmerka arealet.

44
Konklusjonen etter tre forsøk var at det ble forholdsvis stor variasjon fra gang til gang. Videre var
det helt tydelig at innkjøringsdel (rett fram) var for kort. Avrundingskurvene var også for krappe.
Se kapittel 9.13.
Oppsummering og anbefaling
Det er mange frihetsgrader ved utforming av vendehammer. Vi vil anbefale to løsninger hvor det
er tatt utgangspunkt i de to eksemplene som er vist i dette notatet.
Figur 37 Prinsippskisse av vendehammer
Tabell 18 Anbefalte utforminger for vendehammer
Utforming B1 L1 R1 B2 L2 R2
A 5,5 20 8,5 5 12 8,5
B 5,5 20 7 7 12 7
Det må understrekes at det vil finnes mange flere kombinasjoner som kan være like gunstig. Det
kan hende ny Håndbok 017 skal ha med flere varianter som er uttestet i forhold til sporing slik at
en har større mulighet til stedstilpasning. På den andre siden kan det være enklere å forholde seg
til få varianter både for utbyggere og trafikanter.

45
8 Busslommer
8.1 Bakgrunn
SINTEF er videre spurt om å undersøke to ulike utforminger av busslomme i forhold til
framkommelighet og sporing for dimensjonerende buss. Det er både gjort beregninger i
programmet AutoTURN og det er gjort feltforsøk. Feltforsøkene er dokumentert i kapittel 9.12
Utforming A
Denne typen utforming har en innkjøringslengde på 25 meter, utkjøringslengden er 20 meter. Det
er avrundingsradier på 40 meter ved start og slutt av lomma i punkt A og D. Inni lomma er det 20
meters avrundingsradier i punkt B og C. Bredde = 3 meter.
Figur 38 Busslomme type A
Utforming B
Denne typen utforming har en innkjøringslengde på 30 meter, utkjøringslengden er 10 meter. Det
er avrundingsradier på 20 meter ved innkjøring i lomma (punkt A og B). Ved utkjøring er det ikke
lagt inn radier. Bredde = 3 meter.
Figur 39 Busslomme type B

46
8.2 Gjennomføring
Vi har for hver av busslommene foretatt 4-5 sporingsberegninger i AutoTURN med
dimensjonerende buss (15 meter). Bussen startet et stykke før busslomma, den svingte så inn på
busslomma og stoppet med fronten på høyde med punkt C, bussen stod da helt parallelt med BC.
Bussen svingte så ut av lomma og ut igjen i vegen. På flere av AutoTURN-beregningene gjorde
vi forsøket 2-delt slik at bussen var plassert helt inn til fortauskant BC ved start utkjøring. Det ble
foretatt 2-3 sporingsberegninger for hver av disse busslommene.
Ut fra dette har vi foretatt følgende målinger (se også Figur 40 ):
Hvor mye innover kantstein høyre hjørnet foran på bussen kommer ved innkjøring (L1).
Hvor stor sidevegs avstand det er fra bussen til kant av busslomme når bussen er parkert
fremst i busslomma (L2) parallelt med BC. Avstand til fortauskant ved utkjøring (etter
”flytting” av bussen) ble registrert (L3)
Hvor mye overheng bak svinger inn på fortau ved utkjøring fra lomma (L4).
Hvor mye overhenget på høyre side foran svinger inn på fortauet ved utkjøring av lomme (L5)
Hvor langt ut i vegen venstre hjørne foran på bussen kommer ved utkjøring fra busslomma
(L6) i det bakhjulet tangerer fortauskanten ut av lomma (punkt D).
Figur 40 Ulike størrelser som ble kontrollert for busslommene.
8.3 Forutsetninger
Nedenfor er listet opp noen forutsetninger og kommentarer til gjennomføringen av forsøkene.
Det er benyttet funksjonen Generate Arc Path i AutoTURN. Dvs. at kjøretøyene ”styres” vha
PC-musen.
AutoTURN-beregning er kjørt med dimensjonerende buss (15 meter med styring på bakerste
boggiaksel, svingradius 12,5 meter)
Det er stort sett benyttet fart 10 km/t ved AutoTURN-beregning.

47
Overheng ved utsvinging (L4 og L5) varierer noe ut fra hvor fort det svinges på rattet, hvor
langt ut fra kantlinja startposisjonene er, hvor langt fram i lomma det startes og hvilken vinkel
hjulene har ved oppstart.
Kjøremåte i AutoTURN er optimalisert med tanke på at buss skal komme minst mulig ut i
motgående kjørefelt. I tillegg er det ugunstig om overheng kommer inn over fortau. I praksis
vil en slik kjøring kunne avvike noe fra ”normal” kjøremåte. Dette, sammen med generell
variasjon mellom de ulike kjøringene, tilsier at det må opereres med noe usikkerhet i de
tallene som framkommer, særlig hvor langt ut i vegen bussen kommer ved utkjøring.
8.4 Resultat
Tabellen nedenfor viser resultat av disse kjøringene.
Tabell 19 Resultat av AutoTURN-beregninger for busslomme
Buss-lomme
Forsøks-nummer
Buss-type
L1 L2 L3 L4 L5 L6 Merknad
A A1 15m 0 0,22 Uten fart
A A2 15m 0,26 0,16
A A3 15m 0 0,24
A A4 15m 0,24 0,16 0,16 0,08 0 3,09 Høyre hjørne foran på bussen var ca
5 cm innover kantstein før pkt B
A A5 15m - - 0,03 0,25 0 3,21
A A6 15m - - 0,04 0,08 0 3,26 Prøvde bevisst å få minst mulig
overheng bak
B B1 15m 0,15 0,12 0,12 0,10 0,14 3,56 H. bakhjul 3-4 cm over knekk i punkt
D ved utkjøring
B B2 15m 0,24 0,16 0,16 0,10 0,15 3,67
B B3 15m 0,14 0,24 0,24 0,12 0 3,68 L1 før knekk B
B B4 15m 0 0,26 0,26 0,03 0 3,77
B B5 15m 0,21 0,12 0,12 0,18 0,19 3,64
B B6 15m 0,01 0,47 0,28 3,53
B B7 15m 0,03 0,42 0,31 3,57
B B8 15m 0,22 0,13 0,11 3,65
8.5 Kommentar til resultat
For begge utformingene har bussene problem med å komme helt inntil kantsteinen ved oppstilling
på busslomma. Hvis det kjøres slik at høyre hjørne foran på bussen ikke kommer inn over
fortauet (ved pkt B), kommer bussen ca 20-25 centimeter fra kantstein i oppstillingsposisjonen.
Dette problemet kan se ut som det er forholdsvis likt for begge typer busslomme. Hvis høyre
forhjul følger helt inn til kantsteinen ved innkjøring, slik at høyre hjørne foran på bussen kommer
noe inn over fortauet, er det likevel vanskelig å komme nærmere enn 10-15 centimeter fra
kantsteinen i oppstillingsposisjon.
Ved utkjøring fra busslomme B er det noe problem med at overheng kommer inn over fortauet.
Dette gjelder for høyre hjørne foran på bussen for strekning C-D og høyre hjørne bak på bussen
for strekning B-C. Dess nærmere kantsteinen bussen står ved oppstilling, dess større blir disse
utslagene.

48
For busslomme B kommer venstre hjørne foran på bussen generelt lenger ut i motgående kjørefelt
ved utkjøring enn tilsvarende for busslomme A. Dette varierer noe med oppstillingsposisjon og
hvor fort det svinges ut. For busslomme B trengs det vanligvis 3,5-3,75 meters feltbredde for at
bussen skal unngå å komme over i motgående kjørefelt. For busslomme A går det stort sett bra
med kjørefeltbredde under 3,25 meter.
Ut fra noe prøving og feiling i AutoTURN ser vi at optimal kjøring for å komme minst mulig ut i
motgående kjørefelt ved utsving, krever at det svinges resolutt ut fra oppstillingsposisjon i
busslomma. Dette medfører igjen at overheng bak kommer inn over fortau og det kreves mye
”ratting”. Bussen kommer veldig fort ut i tilliggende kjørefelt og kan komme noe overraskende
på trafikk som har vikeplikt for bussen.
8.6 Vurdering og anbefaling
Ved å slake ut inn- og utkjøring til busslommene lettes hverdagen til bussjåførene ved at det blir
mindre behov for å legge bussens overheng inn over fortauet, ”rattingsbehovet” blir mindre, det
blir lettere å få bussen helt inntil fortauskanten (BC) og utkjøring kan foregå uten å måtte over i
motgående kjørefelt. På den andre siden blir busslommene mer arealkrevende. Av de to
utformingene vi har undersøkt vil vi på bakgrunn av sporingsberegningene i AutoTURN gi
følgende anbefaling:
Innkjøring:Det ser ut til å være liten forskjell på de to løsningene i forhold til innkjøring. Busslomme type A
krever minst areal, derfor anbefales denne. Hvis en skal legge til grunn kjøring uten at høyre
hjørne foran på bussen skal komme inn over fortau på strekning B-C må det være slakere
innkjøringsvinkel eller større avrunding i punkt A.
Lengde:I og med at bussen har litt problem med å komme helt inn til kantsteinen, bør det vurderes om
lengden skal økes noe. Dette vil særlig kunne være problem der vegen går i venstrekurve. Noe
større lengde kan også medføre at bussen ikke trenger å kjøre så langt fram i busslomma for å
komme inntil kantsteinen. Dette kan igjen lette utkjøring.
Utkjøring:
Det ser ut som busslomme B har noe krapp utkjøring. Pga problem med overheng innover fortau,
mye ratting og at bussen kommer forholdsvis langt ut i vegen ved utsving, vil vi anbefale en
slakere utkjøringsvinkel. En avrundingsradius ved utløpet av busslomma (pkt D) betyr at det blir
lettere å kjøre ut av busslomma på en smidig måte. I utgangspunktet anbefales det utkjøring som
for busslomme A, men det kan vurderes å gjøre utkjøringsvinkel noe brattere.
Generelt
Det kan opereres med ulike varianter av busslommer ut fra trafikkmengde, fartsnivå, by/land,
arealtilgang, antall busser og størrelse på busser mm. Ved endelige krav til utforming må også
andel anløp med 15-metersbuss i forhold til totalt antall bussanløp tas i betraktning. Vi har vi ikke
foretatt noe vurdering av slike forhold i dette prosjektet.

49
9 Feltforsøk 1
9.1 Innledning
Vi har gjort feltforsøk med sporingsanalyse av en buss og et vogntog (tømmertransport) på
Lånkebanen i Stjørdal kommune. Det ble gjennomført kjøring i ulike typer T-kryss, i
busslommer, rundkjøring og snuplasser, i tillegg ble det kjørt noen forsøk med spesielle
svingebevegelser.
Det er to hovedhensikter med forsøkene. Vi ønsker for det første å kunne sammenligne reell
sporing med sporing beregnet i beregningsverktøy, dette vil kunne gi oss informasjon om hvor
godt beregningsverktøyet simulerer virkeligheten. For det andre ønsker vi å få erfaring med
hvordan sjåførene manøvrerer i gitte situasjoner sett i forhold til det som er teoretisk optimal
kjøring. Dette vil kunne si oss noe om hvor store slingringsmonn det må opereres med i valg av
utforminger.
9.2 Om forsøkene
Kjøretøyene kjørte etter oppmålte linjer. Linjene var opprinnelig tegnet/konstruert i AutoCad. De
ble derfra overført til en håndholdt PC som igjen ble koplet mot totalstasjon. I forbindelse med
utsettingen ble edb-programmet Anfelt benyttet. Utsatte linjer ble markert med spray og delvis
med kjegler.
På hvert av kjøretøyene ble det festet to landmålingsprismer. Hvert prisme ble under kjøring fulgt
av en totalstasjon. Det ble under kjøring registrert punkter med innbyrdes avstand ned til 0,5
meter. Punktene ble satt sammen til ei linje. Hver innmålt linje fikk unikt navn i henhold til navn
på forsøk. Disse linjene ble senere overført til AutoCAD slik at vi kunne foreta avstandsmålinger
mellom disse linjene og linjer som ble brukt til å kjøre etter (de utsatte/oppmerka linjene). De
innmålte linjene ble også benyttet som underlag for å kjøre beregning i AutoTURN.
Det ble gjennomført flere forsøk med hvert av kjøretøyene. Hvert forsøk ble kjørt minst to
ganger.
9.3 Kjøretøyene
Det ble benyttet en buss og et tømmervogntog i forsøkene. Det ble valgt kjøretøy som har
tilnærmet like sporingsegenskaper som de dimensjonerende typekjøretøyene som blir lagt til
grunn for ny Håndbok 017.
Buss
Bussen som ble benyttet i feltforsøkene er skissemessig vist i Figur 41. I vedlegg 5 er vist flere
bilder av bussen. Denne bussen fungerer til daglig som rutebuss i Trondheim.

50
Merke: Scania
Høyde: 3,3 meter
Bredde: 2,55 meter
Figur 41 Buss benyttet i feltforsøk
VogntogVogntoget som ble benytta i forsøkene er skissemessig vist i Figur 42. I vedlegg 6 er det vist flere
bilder fra vogntoget. Vogntoget transporterer til daglig tømmer i Trøndelag. Under forsøket
hadde det fullt lass med tømmer.
Merke: Volvo
Høyde: 4,0 meter
Bredde: 2,55 meter
Figur 42 Vogntog benyttet i feltforsøk
9.4 Utsetting og navnsetting av linjer
Utsetting av linjene som det skulle kjøres etter ble gjort dagen før selve forsøkene skulle
gjennomføres. Vi startet med å sette ut et lokalt origo der de to senterlinjene skulle krysse
hverandre. Dette punktet fikk kjente koordinater (0,0). Punktet ble plassert slik at de to
senterlinjene fikk en hensiktsmessig plassering i ”terrenget”. Vi fortsatte med å sette ut de to
senterlinjene normalt på hverandre. Det ble satt ut noen punkt på linjene og trekt snor mellom
disse, deretter ble det sprayet oppå snora. De andre linjene ble deretter satt ut i tur og orden.
Vi lagde et navnesystem for å holde orden på alle linjene. Linjenavnet sier om det er ei
utsettingslinje eller ei innmålt linje, videre hvilket forsøk den hører til og om den gjelder buss
eller vogntog.
9.5 Plassering av prismer
Buss
Prisme 1 ble plassert i venstre hjørne foran på bussen, ca 0,8 meter over taket (Punkt A). Prisme 2
ble plassert på høyre side i senter av fremste boggiaksel, ca 2-3 meter over taket på bussen (Punkt

51
HB). Det måtte være en viss høydeforskjell mellom prisme 1 og 2 for at de ikke skulle blandes
sammen av kikkertene.
Figur 43 Plassering av prismer på buss
Vogntog
Prisme 1 ble plassert i venstre hjørne foran på vogntoget, ca 0,8 meter over taket (Punkt A).
Prisme 2 ble plassert på høyre side i senter av bakre boggi på tilhenger, ca 2-3 meter over taket på
vogntoget (punkt HB). Det måtte også her være en viss høydeforskjell mellom prismene for at
kikkertene ikke skulle blande dem sammen.
Figur 44 Plassering av prisme på vogntog
9.6 Usikkerhet
I forbindelse med gjennomføring av disse forsøkene må vi regne med en del usikkerhetsfaktorer.
Nedenfor er kort beskrevet de mest utslagsgivende.
Plassering av prismer
Ideelt sett skal prismet stå nøyaktig over hhv punkt A og punkt HB på kjøretøyene. Begge
kjøretøyene var noe avrundet i hjørnene foran. Dette medførte at det kunne være litt tvil om hva
HB
A
A
HB

52
som var nøyaktig punkt A. I praksis viste det seg også å være litt vanskelig å sikte seg inn
nøyaktig med plasseringen av prismene. Vi foretok ikke nøyaktig innmåling av prismenes
plassering i forhold til kjøretøyets omriss, men ut fra notater, øyemål og bilder er det følgende å
bemerke i forhold til plassering av prismene:
Vogntog, Punkt A : Kan ligge 0-10 centimeter innenfor kjøretøyets venstre side. I tillegg kan
det se ut som om prismet ligger 10-20 centimeter lenger bak enn fronten på
vogntoget.
Vogntog, Punkt HB : Ser ut til å ligge noenlunde riktig plassert, muligens litt innenfor kjøretøyets
høyre kant.
Buss, Punkt A: Kan ligge 0-10 centimeter for langt inn i forhold til kjøretøyets venstre side.
Buss, Punkt HB: I lengderetning ser det ut til å være ok. Sideveis ligger det muligens noen
centimeter for langt ut.
Avvik i plassering av prismene vil medføre noe usikkerhet i sammenligning mellom AutoTURN
og feltforsøk.
Prisme HB for buss ble plassert på bussens fremste boggiaksel (hjulene på den bakerste akselen
kan svinges). Dette såg ut til å være riktig ut fra visuelle observasjoner i og med at dette punktet
kom lengst inn i høyrekurver.
Merking av linjer
Ved merking av linjer som ble satt ut, kan det være noe feilmerking i kurver. Dette vil
sannsynligvis maksimalt utgjøre 5-10 centimeter.
Innmåling
Nøyaktighet ved innmåling regnes i følge oppmålingsansvarlig til å være under 1 centimeter. Det
kan imidlertid forekomme feil. I noen tilfeller ble det forveksling mellom prismene. Disse
målingene ble stort sett forkastet. Brå bevegelse i kjøretøyet kan medføre noe svai i stengene som
prismene var festet på. Dette kan føre til noen små avvik i prismenes plassering. Avvikene vil
imidlertid virke i ulike retninger og derfor delvis oppheve hverandre.
Helning
Punkt HB ligger 6-7 meter over bakken. Dette betyr at helning kan påvirke plassering. Et lite
regneeksempel viser at 3% stigning vil gi et utslag på ca 20 centimeter på prismet hvis det er 7
meter over bakken. Forsøk med busslomme foregikk på flat mark, der de andre forsøkene ble
gjennomført er det stigning på anslagsvis 2 % i samme retning som primærvegen.
Friksjon
Ved krapp kurvatur vil friksjonen mellom dekk og underlag ha betydning for
sporingsegenskapene. Det kan være annen friksjon i dette forsøket i forhold til det som er lagt til
grunn i AutoTURN.
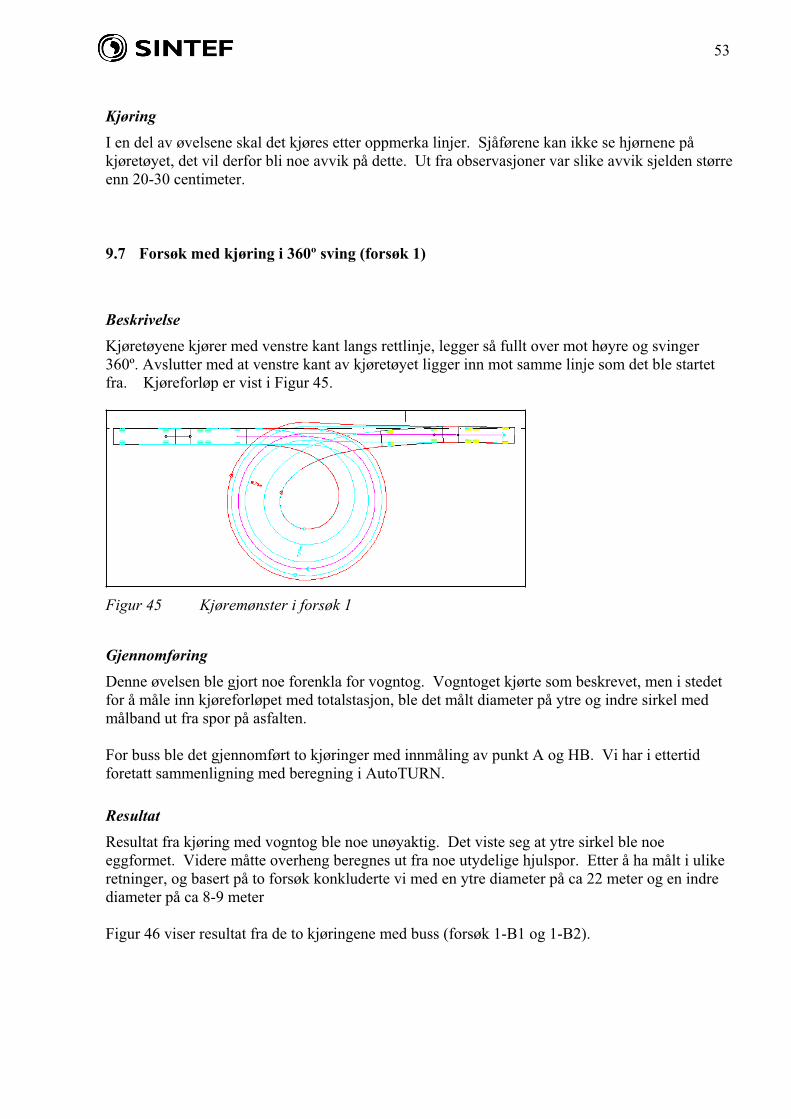
53
Kjøring
I en del av øvelsene skal det kjøres etter oppmerka linjer. Sjåførene kan ikke se hjørnene på
kjøretøyet, det vil derfor bli noe avvik på dette. Ut fra observasjoner var slike avvik sjelden større
enn 20-30 centimeter.
9.7 Forsøk med kjøring i 360º sving (forsøk 1)
Beskrivelse
Kjøretøyene kjører med venstre kant langs rettlinje, legger så fullt over mot høyre og svinger
360º. Avslutter med at venstre kant av kjøretøyet ligger inn mot samme linje som det ble startet
fra. Kjøreforløp er vist i Figur 45.
Figur 45 Kjøremønster i forsøk 1
Gjennomføring
Denne øvelsen ble gjort noe forenkla for vogntog. Vogntoget kjørte som beskrevet, men i stedet
for å måle inn kjøreforløpet med totalstasjon, ble det målt diameter på ytre og indre sirkel med
målband ut fra spor på asfalten.
For buss ble det gjennomført to kjøringer med innmåling av punkt A og HB. Vi har i ettertid
foretatt sammenligning med beregning i AutoTURN.
Resultat
Resultat fra kjøring med vogntog ble noe unøyaktig. Det viste seg at ytre sirkel ble noe
eggformet. Videre måtte overheng beregnes ut fra noe utydelige hjulspor. Etter å ha målt i ulike
retninger, og basert på to forsøk konkluderte vi med en ytre diameter på ca 22 meter og en indre
diameter på ca 8-9 meter
Figur 46 viser resultat fra de to kjøringene med buss (forsøk 1-B1 og 1-B2).

54
Figur 46 Resultat fra forsøk 1-B1 og 1-B2
Den ytterste sirkelen viser forløpet til punkt A på kjøretøyet, den innerste sirkelen viser forløpet til
punkt HB på kjøretøyet. De to feltforsøkene får en gjennomsnittlig indre diameter på 11,39 meter
og en gjennomsnittlig ytre diameter på 24,2 meter.
I Figur 47 er det vist resultat fra AutoTURN-beregning lagt oppå de innmålte linjene fra
feltforsøket med buss. Det er benyttet samme dimensjoner på buss i AutoTURN-beregning som
det er på buss som ble benyttet i feltforsøket. I AutoTURN har vi styrt bussen slik at hjørne A
følger tilsvarende linje fra feltforsøket. Vi har sammenlignet indre radius (forløp for punkt HB på
bussen). Det viser seg at det er noe avvik mellom feltforsøk og AutoTURN-beregning her.
Avviket varierer fra -0,4 til 1,64 meter. Det er størst avvik på siste del av runden. Negativt avvik
betyr at AutoTURN-beregning ligger lenger ut (større radius) enn feltforsøk.
Figur 47 Sammenligning mellom feltforsøk og sporingsberegning i AutoTURN
Vi har i AutoCAD også forøkt å sammenligne resultatet fra feltforsøk og tilsvarende AutoTURN-
beregning i forhold til kjøretøyforskriften. Det kreves i kjøretøyforskriftene at et kjøretøy skal
kunne kjøre mellom to konsentriske radier på henholdsvis 12,5 og 5,3 meter. Resultatet fra dette
er vist i Figur 48. De to figurene til venstre er fra feltforsøket, mens figuren til høyre er fra
AutoTURN-beregning.

55
Figur 48 Sammenligning med krav i kjøretøyforskriftene
Som det framkommer følger ytre sirkel ganske bra. I det ene feltforsøket får vi bare plass til en
sirkel på 4,92 meter, ellers ligger indre sirkel nokså nøyaktig på 5,3 meter
Kommentar til resultat
Det må kommenteres at forløpet til HB avviker noe mellom AutoTURN-beregning og feltforsøk.
Forskjellen er så pass stor at den neppe kan forklares med generell usikkerhet. Dette kan peke i
retning av at simulering av styring på bakerste boggiaksel i AutoTURN ikke stemmer helt overens
med den effekten dette har på den bussen som ble benyttet i feltforsøket for en slik
svingebevegelse. Det er ikke nevneverdig avvik på den 1. halve runden.
Når vi sammenligner radier på indre sirkler (konsentrisk i forhold til ytre sirkel på 12,5 meter) er
ikke forskjellene mellom feltforsøk og beregning så store. Det ene feltforsøket gir samme resultat
som AutoTURN-beregningen, mens det andre gir forskjell i radius på 0,4 meter. Denne
sammenligningen viser også at bussen ligger i grenseland i forhold til å klare kravene i
kjøretøyforskriftene.
Det ble i ettertid bestemt at det skulle gjennomføres noen flere forsøk med 360º sving sett i
forhold til kravene i kjøretøyforskriftene. Dette ble gjort med en 15-metersbuss og en 13,5 meters
buss. Beskrivelse og resultater fra disse forsøkene er referert i kapittel 10.
9.8 Forsøk med kjøring i 180º sving (forsøk 2)
Beskrivelse
Kjøretøyene kjører med venstre kant langs rettlinje, punkt A følger kurve gjennom 180º sving mot
høyre og ut på parallell rettlinje. Radius i svingen er 12,5 meter.

56
Figur 49 Kjøremønster for forsøk 2
Gjennomføring
Det ble i feltforsøket gjennomført tre kjøringer med buss og tre med vogntog. Alle forsøkene ble
målt inn med totalstasjon. Venstre hjørne foran på kjøretøyene fulgte oppmerka linje ganske bra.
Det er i ettertid kjørt tilsvarende kjøring i AutoTURN. Her ble det kjørt etter linje som
representerer forløpet til punkt A fra feltforsøket.
Resultat
Figur 50 viser resultat fra de tre kjøringene med buss (forsøk 2-B1, 2-B2 og 2-B3) Resultatet fra
AutoTURN-beregningene er lagt oppå. Det er god overensstemmelse mellom linje HB fra
feltforsøk og linje HB fra AutoTURN-beregning inntil ca midt i svingebevegelsen. Deretter
kommer HB fra AutoTURN-beregningene lenger inn mot sirkelsenter enn HB fra feltforsøk.
AutoTURN beregner med andre ord større sporingsareal enn resultat fra feltforsøk for denne
svingebevegelsen. Maksimalt avvik mellom linjene for HB varierer fra 0,64 meter til 0,73 meter
for de tre forsøkene. Det er godt samsvar mellom de tre forsøkene.
Figur 50 Buss - Sammenligning av feltforsøk og AutoTURN-beregning for 180º sving

57
Figur 51 viser resultat fra de tre kjøringene med vogntog (forsøk 2-V1, 2-V2 og 2-V3) Resultatet
fra AutoTURN-beregningene er lagt oppå. Det er god overensstemmelse mellom linje HB fra
feltforsøk og linje HB fra AutoTURN-beregning med unntak av et parti inn til midten av
svingebevegelsen. Her kommer HB fra AutoTURN-beregningene lenger ut fra sirkelsenter enn
HB fra feltforsøk. Sporingsforsøk i AutoTURN resulterer med andre ord i et mindre
sporingsareal enn det som framkommer i feltforsøket for denne svingebevegelsen. Maksimalt
avvik varierer fra 0,29 meter til 0,35 meter for de tre forsøkene. Det er godt samsvar mellom de
tre forsøkene.
Figur 51 Vogntog - Sammenligning av feltforsøk og AutoTURN-beregning for 180º sving
Ved innkjøring til svingebevegelsen ligger HB fra feltforsøk inntil 0,58 meter lenger inn enn
tilsvarende for AutoTURN-beregningene. Avstanden varierer innenfor strekningen. Vi har fått
oppgitt at bredde på kjøretøyet er 2.50 meter. Ut fra disse målingene kan det se ut som bredde av
kjøretøyet er under 2 meter. Vi vet ikke hva som er forklaringen på dette, men tror det må ha vært
en feil ved innmåling. I og med at bredde er riktig ved utkjøring, antar vi at innmåling er riktig fra
svingen starter og resten av forløpet.
Kommentar til resultat
Det kommer forholdsvis tydelig fram at bussen, ved utkjøring av 180º svingen, sporer bedre i
feltforsøket i forhold til ved beregning i AutoTURN. Dette er samme tendens som i forsøk med
360º sving.
For vogntoget er det forholdsvis bra overensstemmelse hvis vi ser bort fra det noe uforklarlige
avviket ved innkjøring. AutoTURN beregner litt for lite sporingsareal ved inngangen til svingen,
det er imidlertid for liten forskjell til å trekke konklusjon ut fra.

58
9.9 Forsøk med kjøring i 90º sving (forsøk 3)
Beskrivelse
Kjøretøyene svinger fra primærveg mot høyre inn i sekundærveg. Primærveg har kjørefeltbredde
3,25 meter, mens sekundærveg har kjørefeltbredde 2,75 meter. Det kjøres slik at venstre hjørne
foran på kjøretøyene (pkt A) følger ei markert linje med radius 12,5 meter fra primærvegens
senterlinje og inn på sekundærvegens senterlinje. Dette skal være dimensjonerende svingradius i
ny Håndbok 017. Vi måler inn forløpet av punkt A og punkt HB på kjøretøyene. Forløpet av HB
blir sammenlignet med hjørneavrundingskurve av type 2R-R-3R med radius 12 meter.
Gjennomføring
Det ble gjennomført to forsøk for vogntog og to forsøk for buss. Det var noe varierende hvor godt
kjøretøyene klarte å følge avrundingskurven med sitt venstre hjørne foran.
Det er i ettertid gjort sammenligning mellom feltforsøk og AutoTURN.
Resultat
Figur 52 viser resultat fra forsøkene. Til venstre i figuren er resultatene fra forsøkene med bussen
lagt oppå hverandre, til høyre i figuren er resultatene fra forsøkene med vogntoget lagt oppå
hverandre. Røde kurver viser forsøk 1, grønne kurver viser forsøk 2. Kurvene gjengir forløpet til
punkt A og punkt HB på kjøretøyene.
Figur 52 Resultat forsøk 3
I Tabell 20 er gjort noen sammenligninger mellom forsøkene med buss og vogntog.

59
Tabell 20 Sammenligning av forsøk med buss og vogntog
Buss Vogntog
Punkt A i forhold til kurve Forsøk 1: for det meste 0-20
cm utenfor. Maks +30 cm,
min -10 cm.
Forsøk 2: Følger bra, men
kommer 10-30 cm innenfor
mot slutten av kurve
Forsøk 1: Følger bra i starten,
men fra 20-35 cm utenfor fra
ca midt i kurve
Forsøk 2: Nokså likt som
forsøk 2
Avstand fra HB til
hjørneavrunding ved inngang
0,93 meter (innenfor) 0,93 meter (innenfor)
Punkt hvor HB krysser
hjørneavrunding. Avstand fra
senterlinje primærveg.
9,38 meter 5,29 meter
Avstand fra hjørneavrunding
ved kurvens endepunkt
0,59 meter (utenfor) 0,76 meter (utenfor)
Største avstand fra
sekundærvegens høyre
kjørebanekant til linje A
2,82 meter 3,03 meter
Sammenligning av forsøk 1 og
2
Forløpene for HB ligger veldig
likt ved inngang og utgang av
kurve. Kort strekning midt i
kurve med avvik inntil 38 cm.
A forløper også forholdsvis
likt inntil ved utgangen av
kurve, her er differansen opp
mot 50 cm.
HB har svært likt forløp, maks
differanse på under 10 cm.
Forløpene til punkt A avviker
også lite, midt i kurve er det
opp mot 30 cm
Det er gjort noen forsøk med kjøring i AutoTURN der venstre hjørne foran på kjøretøyet (punkt
A) følger linje som gjengir forløpet til punkt A fra feltforsøkene. Dette resulterte i godt samsvar
for både buss og vogntog. Avviket er i størrelsesorden 0-20 cm.
Kommentar til resultat
Ingen av kjøretøyene klarer denne svingebevegelsen uten at HB krysser hjørneavrundigskurve
(2R-R-3R med R=12 meter). Vogntoget er utenfor hjørneavrundingen over lengre strekning enn
bussen.
Det er i siste del av svingebevegelsen kjøretøyene kommer utenfor hjørneavrundingen. Dette
tilsier at for å kunne opprettholde kjøremåte A for disse kjøretøyene må en øke vegbredden i
sekundærveg eller endre hjørneavrundingen.
Resultatene viser at det blir forholdsvis små forskjeller i kjøretøyenes plassering mellom de to
forsøkene med samme kjøretøy. Selv om det kjøres med lav hastighet og med full konsentrasjon
for å følge linja som det skulle kjøres etter, sier det oss at sjåførene har god kontroll på
manøvrering av kjøretøyene.

60
9.10 Forsøk med kjøring i T-kryss, høyresving, kjøremåte B (forsøk 5, 6, 8 og 10)
Beskrivelse
Kjøretøyene svinger fra primærveg mot høyre inn i sekundærveg. Det kjøres slik at HB (høyre
boggi/høyre bakhjul på henger) akkurat følger oppmerket hjørneavrunding gjennom sving og ut
på rettlinje. Det er noe ulik hjørneavrunding i de ulike forsøkene, ellers er de i prinsippet like. Vi
måler inn punkt A og HB på kjøretøyene.
Forsøk 5: Hjørneavrundingskurve med enkeltkurve, R=6 meter
Forsøk 6: Hjørneavrundingskurve med 2R-R-3R-kurve, R=6 meter
Forsøk 8: Hjørneavrundingskurve med 2R-R-3R-kurve, R=9 meter
Forsøk 10: Hjørneavrundingskurve med 2R-R-3R-kurve, R=12 meter
Gjennomføring
Forsøk 5 ble kjørt kun for buss. De andre forsøkene ble kjørt 1-3 ganger for både buss og
vogntog. Kjøretøyenes bakhjul fulgte hjørneavrunding forholdsvis bra, men det var noe variasjon
fra forsøk til forsøk.
I ettertid er det også gjort forsøk med tilsvarende kjøring i AutoTURN. Det ble kjørt etter linje
som gjengir forløpet til kjøretøyets punkt A i feltforsøket.
Resultat
Figur 53 viser resultat fra forsøk 8 B1. De to linjene representerer forløpene til henholdsvis punkt
A og HB på kjøretøyet. Vi ser at i dette tilfellet er breddebehovet for sekundærveg målt til 4,75
meter. Punkt HB har fulgt hjørneavrunding forholdsvis godt, største avvik er 0,21 meter. Positiv
verdi her indikerer at bakhjul holder seg på rett side av hjørneavrundingskurve (innenfor).
Figur 53 Eksempel på resultat fra forsøk 8
Tabell 21 viser breddebehov i sekundærveg og avvik fra hjørneavrundingskurver for forsøk 5, 6, 8
og 10 for henholdsvis buss og vogntog. Kolonne ”Målt fra kurve” viser hvilke
hjørneavrundingskurve det er kjørt etter. Kolonne ”Breddebehov sekundærveg” og ”Maks avvik
fra kurve” er forklart i Figur 53. Kolonnene til høyre angir hvor brede kjørefelt sekundærvegen
minimum må ha for at det skal være mulig å kjøre etter henholdsvis kjøremåte A og kjøremåte B.

61
Tabell 21 Resultat fra forsøk 5, 6, 8 og 10 – Høyresving kjøremåte B
Feltbredde i sek.veg
[m] for å klare :
Forsøk Kjøre-
tøy
Målt fra kurve Breddebehov
sekundær veg
[m]
Maks avvik
fra kurve [m]
Kjøre-
måte A
Kjøre-
måte B
6-V1 VT 2R-R-3R, R=6 m 8,08 1,01 8,08 4,04
6-V2 VT 2R-R-3R, R=6 m 7,57 0,54 7,57 3,79
8-V1 VT 2R-R-3R, R=9 m 6,96 1,31 6,96 3,48
8-V2 VT 2R-R-3R, R=9 m 6,40 0,58 6,40 3,20
10-V4 VT 2R-R-3R, R=12 m 4,61 0,37 4,61 2,30
5-B1 B R=6 m 6,72 0,45 6,72 3,36
5-B2 B R=6 m 6,61 0,36 6,61 3,30
6-B1 B 2R-R-3R, R=6 m 5,86 -0,06 5,86 2,93
6-B2 B 2R-R-3R, R=6 m 5,74 -0,05 5,74 2,87
8-B1 B 2R-R-3R, R=9 m 4,57 0,21 4,57 2,29
8-B3 B 2R-R-3R, R=9 m 4,79 0,16 4,79 2,4
10-B1 B 2R-R-3R, R=12 m 4,04 0,44 4,04 2,02
10-B2 B 2R-R-3R, R=12 m 3,99 0,35 3,99 2,0
Det viste seg at det særlig for de krappe kurvene var vanskelig å kjøre slik at bakhjulet fulgte tett
på hjørneavrunding gjennom hele svingebevegelsen.
Tabell 22 viser avvik mellom beregning i AutoTURN og kjøring i felt. I AutoTURN er det kjørt
etter innmålt linje som representerer forløpet til punkt A fra feltforsøket. Linjer for punkt HB er
sammenligna med hverandre. Kolonne ”maks avvik HB” viser maksimal avstand mellom disse
linjene. Positiv verdi indikerer at AutoTURN beregner mindre sporing enn det som er resultat fra
feltforsøket.

62
Tabell 22 Avvik mellom beregning i AutoTURN og kjøring i felt
Forsøks-
navn
Kjøretøy-
type
Maks avvik HB Maksavvik,
posisjon
6-V1 VT 0,29 Midt
6-V2 VT 0,21 Midt
8-V1 VT 0,25 Inngang
8-V2 VT 0,23 Inngang
10-V4 VT 0,19 Midt
5-B1 B 0,45 Midt
5-B2 B 0,36 Midt
6-B1 B 0,34 Midt
6-B2 B 0,17 Midt
8-B1 B 0,21 Midt
8-B3 B 0,16 Midt
10-B1 B 0,44 Midt
10-B2 B 0,35 Midt
Kommentar til resultat
Ut fra Tabell 21 ser vi at vi vogntoget krever atskillig større plass for å komme seg gjennom
krysset i forhold til hva bussen trenger.
Vi erfarte også at 2R-R-3R kurvene var godt tilpasset bakhjulets naturlige bane i en slik
svingebevegelse, mens kurvene med kun en radius ble for kort avslutta i utgangen av svingen.
Enda slakere avslutning på 2R-R-3R kurvene hadde virket positivt.
Med unntak av forsøket med vogntog som følger hjørneavrunding 2R-R-3R med radius 6 meter,
vil det være mulig å kjøre etter kjøremåte B så fremt kjørefeltbredde i sekundærveg er minst 3,5
meter. Kjøremåte A er ikke aktuell for noen av kjøretøyene ved denne kjørefeltbredden
Det er stort sett godt samsvar mellom måling og simulering for disse svingebevegelsene.
Problemene med avvik som beskrevet for 180 og 360º er dermed ikke gjeldende her.
9.11 Forsøk med kjøring i T-kryss, høyresving, kjøremåte C (forsøk 15)
Beskrivelse
Kjøretøyene kjører fra primærveg til sekundærveg. Det ble gitt mulighet til å kjøre etter
kjøremåte C. Sjåførene fikk beskjed om å holde seg innenfor venstre kjørebanekanter i
primærveg (bredde 6,5 m) og i sekundærveg (bredde 5,5 m). Kjøretøyene skulle prøve å holde
seg innenfor 2R-3R-R kurve med R=6 m.

63
Gjennomføring
Forsøket ble gjennomført en gang for buss og tre ganger for vogntog. Ved hver kjøring ble punkt
A og HB på kjøretøyene målt inn. Det var noe variasjon i kjøremåte fra gang til gang.
I ettertid er det gjort sammenligning av resultatene fra feltforsøket med tilsvarende kjøring i
AutoTURN. Kjøretøyene i AutoTURN ble etter beste evne navigert slik at punkt A på kjøretøyet
fulgte linje som representerer punkt A fra feltforsøket. Vi sammenlignet da hvordan linje HB fra
AutoTURN stemte overens med linje HB fra feltforsøk.
Resultat
Figur 54 viser resultat fra forsøk 15-V1 (vogntog). De to linjene representerer forløpet til
henholdsvis punkt A og punkt HB på kjøretøyet. Vi ser at i dette tilfellet er breddebehov i
primærveg 6,89 meter og breddebehov i sekundærveg 4,53 meter av primærveg. Vi har målt
lengde på 26,46 til der punkt A er på rett side av senterlinje i primærveg.
Figur 54 Resultat av forsøk 15-V1
Vi har i ettertid forskjøvet kurvene til vogntoget slik at de akkurat holder seg innenfor 2R-R-3R-
kurve med R=9 m. Bussen sammenlignes mot 2R-R-3R kurve med R=6 meter. Vi sammenligner
så breddebehov i primærveg og sekundærveg. Resultat fra dette er vist i Tabell 23.

64
Tabell 23 Resultat fra forsøk 15
Bredde behov [m] Forsøk Kjøretøy
Primær-
veg
Sekundær-
veg
Lengde i
motgående
kjørefelt
Avstand utenfor
hjørneavrunding
[m]
Målt fra kurve
15-V1 VT 6,89 4,53 26,46 Ikke utenfor 2R-R-3R, R=9 m
15-V2 VT 6,92 5,24 25,04 Ikke utenfor 2R-R-3R, R=9 m
15-V3 VT 6,97 5,99 22,68 Ikke utenfor 2R-R-3R, R=9 m
15-B B 3,11 5,85 23,93 Ikke utenfor 2R-R-3R, R=6 m
Sammenligning av resultat fra kjøring i felt med resultat fra AutoTURN viser godt samsvar. For
vogntog er det maks avvik på henholdsvis 21 centimeter, 17 centimeter og 29 centimeter for de tre
forsøkene. Beregna kurve i AutoTURN ligger utenfor målt kurve. For buss er det ikke gjort
sammenligning med AutoTURN.
Kommentar til resultat
Vi ser at for tre kjøringer med vogntog varierer breddebehovet i sekundærveg fra ca 4,5 til 6
meter. I primærveg har vogntoget benyttet bredde opp mot 7 meter. Som det også framkommer
trenger kjøretøyet ikke bruke så mye bredde i sekundærvegen hvis det holder seg i motgående
kjørefelt over lengre strekning.
Bussen benytter kun bredde på 3,11 meter i primærvegen (overheng bak er ikke målt), mens den
utnytter tilnærmet hele bredden av sekundærvegen. Vi fikk inntrykk av at en slik buss med
styring på bakerste boggiaksel var smidig å manøvrere rundt krappe hjørneavrundinger, men at
det måtte vises forsiktighet med tanke på utsving av bakre overheng. Dette gav også sjåføren
uttrykk for,
Forsøkene viser også at det kan være stor variasjon i kjøremåte fra gang til gang for kjøremåte C.
Det er ulikt hvor tidlig det svinges ut i motgående kjørefelt, hvor langt ut det svinges, hvor langt
ut i sekundærveg det svinges og hvor langt inn i sekundærveg kjøretøyet oppholder seg i
motgående kjørefelt.
Avvik på 20-30 centimeter mellom feltforsøk og AutTURN-beregning for vogntog tilsier at vi for
denne svingebevegelsen ikke kan konkludere med noe systematisk avvik mellom måling og
beregning, usikkerhet tatt i betraktning.
9.12 Forsøk med kjøring i busslomme (forsøk 25 og 26)
Beskrivelse
Det ble gjennomført tilsvarende forsøk i felt som vi har gjennomført med AutoTURN for kjøring
inn og ut av to ulike busslommevarianter. Beskrivelse av busslommene og gjennomføring av
forsøket med AutoTURN finnes i kapittel 8.
Bussen som vi benytter i feltforsøket var 14,45 meter lang. I AutoTURN-forsøkene ble det
benyttet dimensjonerende buss fra ny Håndbok 017, den er 15 meter lang.

65
Gjennomføring
Det ble foretatt 2-3 kjøringer for hver av de to busslommevariantene. Bussen kjørte inn på
busslomma og stoppa parallelt med BC (se Figur 38og Figur 39). Det ble målt avstand fra høyre
hjul til BC. Deretter kjørte bussen ut av busslomma og inn på ”vegen” igjen.
Forløp for venstre hjørne foran på kjøretøyet (punkt A) og høyre bakhjul (punkt HB) ble målt inn
med totalstasjon mens bussen kjørte.
Resultat
De innmålte linjene ble overført til AutoCAD. Det ble målt tilsvarende avstander mellom
sporingslinjene og busslommenes geometri som for AutoTURN-forsøkene. Resultatet av dette er
gjengitt i Tabell 24
Tabell 24 Resultat fra feltforsøk med busslomme
Buss-
lomme
Forsøks-
Navn *
Buss-
type
L1 L2 L3 L4 L5 L6 Merknad
A 26-B1 14,45m 0 0,15 0,15 0,16 0 3,35 Målte L3 = 0,20 meter på
stedet
A 26-B2 14,45m 0 0,13 0,13 0,15 0 3,37
B 25-B2 14,45m 0 0,11 0,11 0,65 0 3,43 Målte L3 = 0,15 meter på
stedet. Svingte full sving rett
ut fra busslomma
B 25-B3 14,45m 0 0,10 0,10 0,41 0 3,56
B 25-B4 14,45m 0 -0,05 -0,05 Det ble kjørt slik at framhjulet
fulgte kantlinje inn mot
busslomme.
Kommentar til resultat
Resultatene peker i samme retning som AutoTURN-beregningene i kapittel 8. I og med at denne
bussen er kortere, er problemene noe mindre.
Det kan tyde på at plassering av prismene på bussen medfører at verdiene L2, L3 og L6 blir 5-10
centimeter for lave. Dette kan vi se ut fra å sammenligne målte avstander til kantstein i felt i
forhold til innmålte linjer.
9.13 Forsøk med kjøring i vendehammer (forsøk 27)
Beskrivelse
Det ble gjennomført forsøk med snuing av buss i vendehammer. Vendehammer ble satt ut fra
totalstasjon og merket med spray. Vendehammer brukt i forsøket hadde utforming som vist i
Figur 55. Alle mål er oppgitt i meter.

66
Figur 55 Vendehammer benyttet i feltforsøk
Gjennomføring
Det ble gjort tre forsøk med å snu bussen i vendehammeren. Bussen kjørte først rett fram i
vendehammeren, deretter rygget den inn mot sidearmen før den til slutt kjørte tilbake der den kom
fra.
Resultat
Vi markerte busskarosseriets ytterposisjoner på asfalten ved de ulike svingebevegelsene. Det ble
målt avstander fra de oppmerka. Tabell 25 viser avleste avstander A1 til A6.
Figur 56 Rundkjøring benyttet i feltforsøk
Tabell 25 Målte avstander A1, A2,.. A6
Forsøksnr A1 A2 A3 A4 A5 A6
1 6,60 1,70 0 1,20 0 0
2 4,80 1,45 0 0,35 0,40 0,20
3 4,95 0,85 0 0,40 0,20 0,50
Kommentar til resultat
Denne vendehammeren er i utgangspunktet for liten i forhold til at en slik buss skal kunne snu
uproblematisk på den. Vi ser at det blir noe ulikt resultat fra gang til gang. Sjåføren var i

67
utgangspunktet litt usikker på hva som ville være optimal måte å snu på. De tydeligste
problemene var at bussen måtte kjøre atskillig lenger fram enn oppmerkingen, videre ble det
forholdsvis stort utslag (A2) ved rygging bak i lomma. Det er også vanskelig å komme seg ut av
sidearmen uten at enten hjørnet foran på kjøretøyet eller bakhjulet kommer utenfor oppmerkingen.
9.14 Forsøk med kjøring i rundkjøring (forsøk 20 og 21)
Beskrivelse
Det ble gjennomført forsøk med kjøring i rundkjøring for buss og vogntog. Rundkjøringen var
satt ut fra totalstasjon og merket med spray. I tillegg ble det satt på kjegler på kantlinjene.
Rundkjøringen som ble brukt i forsøket hadde utforming som vist i Figur 57. Alle mål er oppgitt i
meter. Dette er en utforming som er anbefalt i den nye kryssveilederen [9].
Figur 57 Rundkjøring benyttet i feltforsøk
For å slippe å flytte prismene på kjøretøyene over til motsatt side, ble forsøkene gjennomført
speilvendt. Vi har i ettertid speilvendt de innmålte linjene slik at det ser ut som om forsøkene er
kjørt som normalt. Dette kunne vi gjøre i og med at rundkjøringen er symmetrisk utformet.
Speilvendt kjøring medfører at sjåførsiden av kjøretøyet blir sittende mot ytterkant av
rundkjøringen i stedet for inn mot sentraløy som ved vanlig kjøring. I og med at sjåførene ble
diktert hvordan det skulle kjøres, har dette trolig liten betydning.
Vi ønskte å evt. avdekke problempunkt i rundkjøringen og sammenligne virkelig kjøring med
kjøring i AutoTURN.
Gjennomføring
Med bussen ble det gjennomført 2 forsøk med 180º svingebevegelse (rett fram bevegelse), 2
forsøk med 270º svingebevegelse (sving til venstre) og 2 forsøk med 720º svingebevegelse (to
runder). Med vogntoget ble det kun utført ett forsøk med 720º sving. Dette på grunn av
tidsbegrensninger.

68
Bussjåføren fikk beskjed om å legge kjøretøyet så langt som mulig ut mot ytre radius.
Vogntogsjåføren kjørte fritt. Alle kjøringene med buss var medurs. Vogntoget kjørte moturs.
Vi har i ettertid foretatt kjøring i AutoTURN ”oppå” de innmålte linjene fra feltforsøkene for å
sammenligne beregning og virkelig kjøring.
Resultat, buss 180º sving
Begge forsøkene med å kjøre rett fram i rundkjøring ga tilnærmet like resultat. Vi viser derfor
kun resultatene fra det ene av forsøkene, Figur 58 illustrerer disse resultatene.
Figur 58 Resultat fra kjøring med buss rett fram i rundkjøring, feltforsøk til venstre,
AutoTURN-beregning oppå feltforsøk i midten, AutoTURN til høyre
Figuren til venstre viser de innmålte linjene fra feltforsøket. Hvis vi konstruerer ei sentraløy som
tangerer inn mot sporet til bussens venstre bakhjul, ville det vært plass til ei øy med maksimal
radius på 6,6 meter. Ved innkjøring i rundkjøringen tangerer bakhjulet hjørneavrundingen. Når
det svinges mot venstre kommer derimot overhenget bak 0,84 meter utenfor denne
hjørneavrundingen. Ved utkjøringen av rundkjøringen må bussen 0,75 meter ut i motgående
kjørefelt for å unngå at bakhjulet kommer utenfor hjørneavrundingen.
I den midterste av figurene er det i AutoTURN styrt ut fra de innmålte linjene fra feltforsøket.
Dette gir stort sett samme utstikk med overhenget bak (0,77 meter). Maks indre radius på
sentraløya blir nå 6,78 meter. Differansen mellom bakhjul fra feltforsøk og tilsvarende kjørelinje
fra AutoTURN er forholdsvis liten (maks ca 20 centimeter).
Når vi kjører AutoTURN på frihånd (høyre rundkjøring på figuren) klarer vi etter noe prøving og
feiling å kontrollere svingen slik at hele bussen holder seg innenfor rundkjøringen. Radius på
sentraløy kan da ikke overstige 5 meter.

69
Resultat, buss 270º sving
Begge forsøkene med å kjøre til venstre i rundkjøring ga tilnærmet samme resultat. Vi viser
derfor kun resultatene fra ett av forsøkene, Figur 59 illustrerer disse resultatene.
Figur 59 Resultat fra kjøring med buss til venstre i rundkjøring, feltforsøk til venstre,
AutoTURN-beregning oppå feltforsøk i midten, AutoTURN til høyre
Figuren til venstre viser de innmålte linjene fra feltforsøket. Hvis vi konstruerer ei sentraløy som
tangerer inn mot sporet til bussens venstre bakhjul, ville det vært plass til ei øy med maksimal
radius på 6,1 meter. Ved innkjøring i rundkjøringen tangerer bakhjulet hjørneavrundingen. Når
det svinges mot venstre kommer derimot overhenget bak 0,81 meter utenfor denne
hjørneavrundingen. Ved utkjøring av rundkjøringen klarer ikke bussen å holde seg innenfor sitt
kjørefelt. Det ble ikke registrert hvor mye over senterlinja den kom.
Vi ser ut fra den midterste rundkjøringen at kjøring med AutoTURN styrt ut fra linjene fra
feltforsøket, stort sett gir samme utstikk for overhenget bak (0,84 meter). Maksimal radius for
sentraløya blir nå 6,06 meter. Vi ser imidlertid at det på noen steder i svingebevegelsen er
differanse mellom indre bakhjul for henholdsvis AutoTURN og feltforsøk. På den meste er denne
avstanden målt til ca 0,5 meter.
Når vi kjører AutoTURN på frihånd klarer vi å kontrollere svingen slik at overhenget bak ikke
kommer utenfor hjørneavrundingen. Vi må derimot gå ned til radius på 5,77 meter på sentraløya
for å unngå at bakhjulet kommer i konflikt med denne. Ved utkjøring må vi 0,54 meter over
midtlinjen for å ikke komme utenfor hjørneavrundingen med bakhjulet.
Resultat, buss 720º sving
Det første forsøket med å kjøre to runder i rundkjøringen ble ikke fullstendig. Vi viser derfor i
hovedsak resultatene fra det andre forsøket. Figur 60 viser noen resultater.
De to rundkjøringene lengst til venstre i figuren viser resultatene fra de to feltforsøkene, figuren til
høyre viser resultat for tilsvarende kjøring i AutoTURN.

70
Figur 60 Resultat fra kjøring med buss i rundkjøring, feltforsøk 1 til venstre, feltforsøk 2 i
midten, AutoTURN til høyre
Feltforsøket i rundkjøring til venstre i figuren er noe mangelfull. Vi kan like fullt se at det vil
være en begrensende indre radius på 5,66 meter.
I det andre forsøket (midterste rundkjøring) ender vi ut med et krav om indre radius på 5,59 meter.
Vi ser at hjørnet foran på kjøretøyet har vært ca 0,7 meter utenfor hjørneavrundingen på den andre
runden. For øvrig har vi også her problem med overheng bak som kommer utenfor
hjørneavrunding (ca 0,7 meter) ved innkjøring i rundkjøring, det er også problem ved utkjøring.
Ved utkjøring ble hjørnet foran på kjøretøyet målt 1,15 meter over midtlinje.
Når vi kjører AutoTURN på frihånd klarer vi å kontrollere kjøringen slik at overhenget bak ikke
kommer utenfor hjørneavrundingen. Vi må derimot gå ned til radius på 5 meter på sentraløya for
å hindre at bakhjulet kommer i konflikt med denne. Ved utkjøring må vi 0,69 meter over
midtlinjen for å ikke komme utenfor hjørneavrundingen med bakhjulet.
Resultat, vogntog - 720º sving
Hjørnet foran på kjøretøyet fulgte godt innenfor ytre diameter. I og med at kjøretøyet kjørte
moturs, hadde vi ikke prisme på indre bakhjul, dermed fikk vi ikke målt inn indre avgrensning.
Ved utkjøring av rundkjøring kom hjørnet foran på vogntoget 0,7 meter over midtlinjen, samtidig
kom høyre hengerbakhjul ca 0,2 meter utenfor vegkant

71
Figur 61 Resultat fra kjøring med vogntog i rundkjøring, feltforsøk til venstre, AutoTURN til
høyre
Forsøket med vogntoget gikk uproblematisk. Kjøretøyet holdt seg innenfor ytre diameter.
Det ble kjørt AutoTURN-beregning der hjørnet foran på kjøretøyet fulgte tilsvarende linje fra
feltforsøket. Dette ville gitt plass til ei sentraløy med radius på ca 3,75 meter.
Kommentar til resultat
Hvis radius på sentraløya i rundkjøringen blir særlig større enn 5 meter når ytre radius er på 12,5
meter, blir det vanskelig å kjøre ut av rundkjøringen uten å måtte over i motgående kjørefelt med
fronten. Det er også lett for at bussen sitt overheng bak kommer utenfor hjørneavrunding i
innkjøringen til rundkjøringen. Dette gjelder både ved kjøring rett fram og ved sving til venstre.
9.15 Oppsummering av feltforsøk
Feltforsøkene viser at det er godt samsvar mellom AutoTURN-beregning og feltforsøk ved
svingebevegelser inntil ca 90º. Ved svingebevegelser på 180º og 360º kan det se ut som
sporingsberegninger for buss i AutoTURN beregner større sporingsareal enn det som
framkommer av feltundersøkelsene.
Sjåførene har god kontroll på kjøretøyene og klarer å kjøre nøyaktig i forhold til de linjer de er
bedt om å følge. De største variasjonene fikk vi når bakhjulet skulle følge en hjørneavrunding.
Særlig for vogntog må det store utslag til med trekkvognen før det gir utslag på hengerens
bakhjul.
Feltforsøkene understreker problemene bussene har ved inn og utkjøring fra busslommer:
problem med å komme helt inntil fortau
bussens overheng kommer inn på fortau
Høyre hjørne foran på bussen kommer over i motgående kjørefelt ved utsving

72
Forsøkene viser at bussen har problem med å klare svingkravene i ”forskrifter for bruk av
kjøretøy” [5].
Alt i alt fungerte metodikk slik vi hadde tenkt. I ettertid ser vi imidlertid at det skulle vært brukt
mer tid på å finposisjonere prismene på riktig plass på kjøretøyene og gjort noe mer testing i
forkant. Dette kunne redusert usikkerheten noe. Vi hadde i det hele tatt lagt opp litt for ambisiøst
program både i forhold til utsetting av linjer og gjennomføring av selve forsøkene. Dette gikk
særlig ut over forsøkene med vogntog. Her måtte vi skjære ned en del på programmet.
Det var litt uheldig at bakerste prisme måtte stå så høyt. I følge våre oppmerkingsansvarlige vil
det være mulig med adressering av prismer mot gitt kikkert, dermed unngår vi sammenblanding
og prismene kunne da stått lavere. Et enda bedre alternativ vil være bruk av GPS med egen
basestasjon. Dette kunne også være med å redusere usikkerheten.
Det kan være interessant å gjøre flere forsøk der sjåførene får kjøre slik de normalt kjører ut fra
ulike geometrier. Særlig kjøring i ulike typer rundkjøringer vil være interessant. Her er det
erfaringsmessig ikke så lett å velge ”riktig” kjøremåte i AutoTURN. I tillegg til plassering av
kjøretøyet, kan det også trekkes inn parametre som fart, alternative utforminger osv.
10 Feltforsøk 2
10.1 Innledning
SINTEF har i samarbeid med Statens vegvesen og Nettbuss AS gjennomført feltforsøk for å finne
ut mer om sporingsegenskapene til en 15 meter lang buss og en 13,5 meter lang buss. Forsøkene
ble gjennomført på Nettbuss sitt oppstillingsområde på Marienborg i Trondheim.
Det ble gjort forsøk med kjøring mellom to konsentriske sirkler med radius på henholdsvis 12,5
og 5,3 meter. Kjøretøyene starta fra rettlinje og kjørte en eller to runder mellom sirklene.
”Forskrifter om bruk av kjøretøy” [5] stiller krav om at alle kjøretøy skal kunne kjøre en runde
mellom to slike sirkler.
Hovedformålet med forsøket var å skaffe et bedre grunnlag for endelig valg av dimensjonerende
buss i 017.
For samme formål er det henta data fra Opplysningsrådet for Vegtrafikken som gir antall
norskregistrerte busser i ulike lengdekategorier mellom 14 og 15 meter, se Figur 62

73
6 83
28
3
80
11
44
4
85
13
0
10
20
30
40
50
60
70
80
90
100
1400-
1409
1410-
1419
1420-
1429
1430-
1439
1440-
1449
1450-
1459
1460-
1469
1470-
1479
1480-
1489
1490-
1499
1500-
Lengde (mm)
An
tall
Figur 62 Lengde på registrerte busser pr 1/1-2006
10.2 Kjøretøyene
Følgende kjøretøy ble benytta i feltforsøket:
Buss, 15 meter
Type: Mercedes O550U15m 6X2
Overheng foran: 3,10 meter
Akselavstand (framaksel til fremste bakaksel): 6,95 meter
Avstand mellom bakaksler: 1,60 meter
Overheng bak: 3,30 meter
Nøyaktig lengde: 14,95 meter
Bredde 2,55 meter
Styring på bakerste aksel: Ja
Figur 63 15-metersbuss benyttet i feltforsøk.

74
Buss 13,5 meter
Type: Volvo (ikke boggi)
Overheng foran: 2,555 meter
Akselavstand: 7,0 meter
Overheng bak: 3,94 meter
Nøyaktig lengde: 13,495 meter
Bredde 2,55 meter
Styring på bakerste aksel: Nei
Begge bussene går i vanlig rutetrafikk i Trøndelag.
10.3 Oppmerking og forberedelser.
I forkant av forsøkene merka vi opp linjer som vist på Figur 64.
Figur 64 Oppmerking av linjer som det skulle kjøres etter.
Den ytre sirkelen har radius 12,5 meter, den indre har radius 5,3 meter. Det ble tegnet opp ei
rettlinje AB som tangerte sirkelen. Der rettlinje tangerer sirkel ble definert som klokkeretning 12.
Det ble tegnet streker fra sirkelsentrum til klokkeretning 12 , 3, 6 og 9. Bussens sporingsforløp
ble målt langs disse strekene.
Forsøkene foregikk på grus. Vi markerte sirkelsenter og brukte deretter målband for å konstruere
sirklene. Sirklene ble streket opp i grusen, deretter markert med spray. Rettlinje og
retningsstreker ble siktet inn vha målband og øyemål. Disse linjene ble også markert med spray.
I tillegg ble rettlinje AB markert med ei kjegle i hver ende.
10.4 Gjennomføring av forsøkene
Bussene stilte seg i startposisjon parallelt med rettlinje med venstre side inn mot denne til venstre
for sirkel. Bussene kjørte inn mot sirkel og kjørte en eller to runder før den rettet opp og kjørte ut
mot punkt B på rettlinje. Venstre hjørne foran på bussen skulle hele tiden holde seg innenfor den
ytre sirkelen, og heller ikke krysse linje AB verken ved innkjøring eller utkjøring. Figur 65 viser
eksempel på hvordan det ble kjørt.

75
Figur 65 Eksempel på kjøring en runde mellom sirklene
Det ble gjennomført 3 forsøk med 15-meters buss der det ble kjørt 1 runde og ett forsøk med 15-
meters buss der det ble kjørt 2 runder. For 13,5 meters buss ble det gjennomført 2 forsøk med 1
runde og 1 forsøk med to runder.
10.5 Resultat feltforsøk
Tabell 26 viser resultat fra forsøkene
Tabell 26 Resultat fra feltforsøk 2
Avstand fra sirkelsenter til bussens indre sporingsbegrensning
(meter) i ulike klokkeretninger
Buss Ant.
runder
Retning 3 Retning 6 Retning 9 Retning 12
Merknad
15 m 1 6,05 5,34 5,60 6,90 1
15 m 1 6,25 5,65 5,75 6,65 2
15 m 1 6,30 5,65 5,80 6,60 3
15 m 2 5,57/5,85 5,85/5,74 6,56/6,14 5,74/6,40 4
13,5 m 1 6,60 6,34 7,24 8,06 5
Merknad 1: Venstre hjørne foran på bussen var 10-20 cm innenfor ytre radius i sektor fra
klokkeretning 2-5. I fra klokkeretning 6 til 12 kom hjørnet foran ca 20-30 cm
utenfor ytre radius. Bussen hadde fullt rattutslag gjennom tilnærmet hele
svingebevegelsen.
Merknad 2: Venstre hjørne foran på bussen fulgte bra, men fra klokkeretning 6 til 12 kom
hjørnet foran ca 20-30 cm utenfor ytre radius. Bussen hadde fullt rattutslag
gjennom tilnærmet hele svingebevegelsen.
Merknad 3: Venstre hjørne foran på bussen fulgte bra, men fra klokkeretning 6 til 12 kom
hjørnet foran ca 20-30 cm utenfor ytre radius. Bussen hadde fullt rattutslag
gjennom tilnærmet hele svingebevegelsen.
Merknad 4: Bussen kjørte nå i motsatt retning, dvs den startet ved punkt B, kjørte moturs i
sirkel før den kjørte ut igjen mot punkt A. Høyre hjørne foran på bussen fulgte

76
sirkelbuen bra, men kom tidvis ca 20-30 cm utenfor ytre radius. Bussen hadde
fullt rattutslag gjennom tilnærmet hele svingebevegelsen.
Merknad 5: Venstre hjørne foran på bussen fulgte bra til ca klokkeretning 6, derfra ble det
større og større avvik. Ved utkjøring var selv venstre forhjul utenfor 12,5 meters
sirkelen. Dette forsøket ble repetert, resultatet ble tilnærmet det samme begge
gangene.
I tillegg til disse forsøkene ble det gjort forsøk med 13,5 meters bussen der den kjørte 2 runder
med fullt rattutslag. Vi markert forløpet til venstre hjørne foran på bussen (streking i grus).
Deretter målte vi ca diameter. Følgende diametre ble registrert:
Tabell 27 Resultat fra forsøk med måling av svingradius
Klokkeretning
fra Til
Diameter
2 8 25,70
3 9 25,90
4 10 25,70
6 12 26,10
10.6 Tilsvarende forsøk med AutoTURN
I ettertid har vi gjort tilsvarende forsøk med AutoTURN. Det ble definert kjøretøy med identiske
overheng og akselavstander. Disse ble kjørt på samme måte.
Tabell 28 viser resultat fra disse beregningene.
Tabell 28 Resultat fra AutoTurn
Avstand fra sirkelsenter til bussens indre sporingsbegrensning
(meter) i ulike klokkeretninger
Buss Ant.
Runder
Retning 3 Retning 6 Retning 9 Retning 12
Merknad
15 m 1 5,64 4,94 4,79 5,69 6
15 m 1 5,69 5,02 4,82 5,74 7
13,5 m 1 6,67 6,3 7,13 8,05 8
13,5 m 1 6,58 6,15 6,06 6,78 9
13,5 m
Merknad 6: Det er lagt inn eksakt samme mål som for 15 meters buss benyttet i feltforsøket.
Merknad 7: Det er lagt inn mål som for 15 meters buss foreslått til nye 017.
Merknad 8: Det er lagt inn eksakt samme mål som for 13,5 meters buss benyttet i feltforsøket.
Det er gitt svingradius 13 meter. Resultatet er også vist i Figur 66.

77
Figur 66 Resultat for beregning i AutoTURN med 13,5 meters buss, svingradius 13 meter
Merknad 9: Det er lagt inn eksakt samme mål som for 13,5 meters buss benyttet i feltforsøket.
Det er gitt svingradius 12,5 meter.
10.7 Kommentar til resultat
15-metersbussen holder seg utenfor indre radius (5,3 meter) i alle feltforsøkene. Det kan
imidlertid tyde på at svingradiusen på denne bussen er litt mer enn 12,5 meter, i og med at det ytre
hjørnet foran på bussen kommer litt utenfor den ytre sirkelen på slutten av runden (fra
klokkeretning 6 og utover). Det at avstand fra sirkelsentrum til sporingsavgrensning er større for
klokkeretning 9 enn for klokkeretning 6 tyder også på at bussen har problem med å holde ytre
radius. I AutoTURN-beregningene er alltid denne avstanden kortere i retning 9 enn i retning 6.
AutoTURN beregner større sporbredde for 15-metersbussen enn det som er resultatet av
feltforsøkene. Dette stemmer også med erfaringene fra feltforsøkene på Lånkebanen. Dette
understreker at metodikken for sporingsberegning i AutoTURN er noe usikker for busser med
styring på bakerste boggiaksel, og da særlig for store svingebevegelser (se kapittel 1.4).
Forskjellen mellom feltforsøk og AutoTURN-beregning blir ekstra stor i og med at 15-
metersbussen i feltforsøket har problem med å følge ytre radius på 12,5 meter, mens bussen i
AutoTURN har svingeradius på 12,5 meter
Beregning av sporing med 15-metersbuss, som er foreslått som dimensjonerende buss i ny
Håndbok 017, viser at denne bussen og buss brukt på feltforsøk har tilnærmet samme
sporingsareal.
13,5-metersbussen har problemer med den ytre sirkelen. Indre sirkel er ikke problem. Beregning
i AutoTURN med tilsvarende buss med svingradius på 13 meter gir veldig godt samsvar med
resultat fra feltforsøket (største avvik 11 cm). Beregning i AutoTURN for 13,5-metersbuss med
svingradius 12,4 meter viser at denne klarer å holde seg utenfor indre sirkel.

78
10.8 Konklusjoner
15-metersbussen i feltforsøket klarer tilnærmet å kjøre mellom 12,5 og 5,3-meterssirklene. Den
har litt problem med å holde seg innenfor ytre radius.
13,5-metersbussen klarer ikke den ytre sirkelen. Det kan tyde på at den har svingradius på ca 13
meter.
Noe av hensikten med dette forsøket var å finne ut hvilken buss som skal benyttes som
dimensjonerende buss i ny Håndbok 017. I forhold til å oppfylle sporingskravene i
kjøretøyforskriftene er ikke totallengden alene avgjørende. Kombinasjon av totallengde,
overheng, akselavstand, bredde, styring på bak eller ikke og maksimal styringsvinkel virker inn på
sporingsegenskapene.
Oversikten fra Opplysningsrådet for vegtrafikken viser at det ikke utkrystalliserer seg bestemte
busslengder i den norske bussparken av busser med lengde 14-15 meter. Når totallengden
varierer, varierer nok også akselavstander, styringsvinkler osv. Vi fikk også etter besøket hos
Nettbuss AS forsterket inntrykket vårt av at det finnes mange ulike bussvarianter.
Vi kan beholde 15-metersbussen som dimensjonerende buss i ny Håndbok 017 så lenge vi
forutsetter at styringsvinkelen er slik at bussen klarer å holde seg innenfor 12,5-meterssirkelen og
Det kan tyde på at en god del litt eldre busser ikke klarer å holde seg innenfor 12,5 meters
sirkelen. Vi har ikke grunnlag for å kunne angi hvor stor andel av den norske bussparken dette
gjelder.
11 Oppsummering
Bruk av AutoTURN har fungert godt for å beregne sporingsareal for ulike typekjøretøy ved
kjøring i kryss, busslommer, snuplasser osv.
Resultat fra sporingsberegningene fra kjøring i T-kryss viser at kjøremåte A for vogntog og buss,
kun er mulig ved feltbredde opp mot 4 meter og samtidig slak hjørneavrunding. I praksis vil de si
at kjøremåte A er nesten utelukket i forbindelse med gatekryss.
Busslommer må ha slak innkjøring for å sikre at bussen kommer helt inn til kantsteinen. Ved
utkjøring vil for kort utkjøringsstrekning medføre problem med at overheng bak kommer inn på
venteareal og at venstre hjørne foran på bussen kan komme i konflikt med trafikk i motgående
kjørefelt.
Det er gjort sporingsberegninger for ulike snuplasser. Hvis det kun legges vekt på at
typekjøretøyene skal kunne snu, og det ikke kreves kjøremåte A, er det mulig å redusere
snuplassareal noe i forhold til dagens anbefalinger.
Det er gitt anbefalinger i forhold til breddeutvidelse i kurver og i slyng. De nye anbefalingene
avviker ikke mye fra de tidligere anbefalingene.

79
Resultat fra feltforsøkene stemmer godt med beregningene i AutoTURN med unntak av 180 og
360º svinger med fullt rattutslag for buss med styring på bakerste boggiaksel, der blir det noe
avvik på en del av sporingskurven.
Erfaringene fra feltforsøkene tilsier også at det må legges inn slingringsmonn i anbefalingene i
vegnormalene. Dette gjelder særlig for rundkjøringer og snuplasser hvor kjøretøyene ikke har
noen faste linjer å kjøre etter.
Feltforsøket avdekker også at det i en del situasjoner, f.eks i rundkjøring og på busslommer, er
vanskelig å ha helt kontroll over overhenget bak på bussen.
Feltforsøk 2 viser at 15-metersbussen med styring på bakerste boggiaksel tilnærmet klarte
framkommelighetskravene i forskrifter for bruk av kjøretøy [5]. 13,5-metersbussen uten boggi
hadde derimot problem med å holde seg innenfor den innerste sirkelen.

80
Litteratur
[1] Alsaker Lk, Sakshaug K. Slyng som linjeføringselement. STF61 A78006. 1978. SINTEF-
rapport.
[2] Engstrøm JE, Hovd A. Vegnormalene - geometrisk utforming normalforslag for slyng.
1980. SINTEF. SINTEF-rapport.
[3] Lyder Hole. Utforming av rundkjøringer. 2002.
[4] Samferdselsdepartementet. Forskrift om tekniske krav og godkjenning av kjøretøy, deler
og utstyr. 11-30-2005. Lovdata.
[5] Samferdselsdepartementet. Forskrifter for bruk av kjøretøy. 5-26-2005. Lovdata.
[6] Statens Vegvesen. Vegutforming - Håndbok 017. 1981. Vegdirektoratet.
[7] Statens Vegvesen. Veg- og gateutforming. Håndbok 017. 1992. Oslo, Vegdirektoratet.
[8] Statens Vegvesen. Ny Håndbok 017, Veg og gateutforming (Høringsutgave). 2005.
[9] Statens Vegvesen. Håndbok 263 - Geometrisk utforming av veg- og gatekryss
(Høringsutgave). 2006.
[10] Statens Vegvesen. Vegliste 2006 - Riksveger. 2006.
[11] Transoft solutions Inc. AutoTurn. 2005.
[12] Transoft solutions Inc. AutoTURN - User's guide. 2005.

81
Vedlegg 1 - Sporingssjablong for dimensjonerende personbil

82
Vedlegg 2 – Sporingssjablong for dimensjonerende lastebil

83
Vedlegg 3 – Sporingssjablong for dimensjonerende vogntog

84
Vedlegg 4 – Sporingssjablong for dimensjonerende buss

85
Vedlegg 5 - Bilder fra feltforsøk 1, Buss

86
Vedlegg 6 - Bilder fra feltforsøk 1, Vogntog

87
Vedlegg 7 – Andre bilder fra feltforsøk 1
1
2 3
4
Bilde 1: Tømmervogntog i aksjon
Bilde 2: Forhåndsoppmerking av hjørneavrundingslinjer
Bilde 3: Fra arbeidet med utsetting av linjene
Bilde 4: Oppstillingsposisjon for kikkertene