Embed Size (px)
Citation preview

自动控制综合实验 2 实验指导书
Part 1
球杆系统 GBB1004
北京邮电大学自动化学院
林雪燕
2018.5.25

2
前 言
自动控制是一门理论与实践并重的技术,在成功掌握了理论知识(经典控制、
现代控制)的同时再配合做一些经典的自动控制实验,从而加深对自动控制的理解
与掌握,为今后从事自动控制的设计和研究工作打下扎实的基础。
为了更好地配合理论教学,达到理论与实践完美的结合,将自动控制相关的实
验独立设置成一门实验课:自动控制综合实验。自动控制理论实验主要目的是通过
实验进一步理解自动控制理论的基本概念,熟悉和掌握控制系统的分析方法和设计
方法,掌握常用工程软件使用,如 MATLAB、LabVIEW 等。上学期开设的自动控
制综合实验(1)主要内容为控制系统的 Matlab/simulink 仿真和基于实验箱的硬件
模拟,以电路系统为研究对象。本学期开始的自动控制综合实验(2)的内容是基于
典型控制理论实验设备(球杆系统和倒立摆系统),熟悉和掌握控制系统的分析和
设计方法。
球杆系统是研究控制理论最为经典的实验设备之一。它结构简单、安全,而且
涵盖许多经典和现代控制对象的特性,具有非线性不稳定系统所具有的重要动态特
性,可以直观的反映控制器的控制效果。球杆系统可以用于实现各种已有的控制理
论和方法,也可以作为新的理论和控制方法的检测工具。因此球杆系统作为一个经
典的控制对象被广泛应用于控制理论的研究中。球杆系统要完成的实验有:
实验一:小球位置的数据采集处理
实验二:球杆系统的PID法控制
实验三:球杆系统的根轨迹法控制
实验四:球杆系统的频率响应法控制
倒立摆是一个典型的不稳定系统,同时又具有多变量、非线性、强耦合的特性,
是自动控制理论中的典型被控对象。运用控制手段可使之具有一定的稳定性和良好
的控制性能。许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和
系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。倒立摆系统要完成的
实验有:
实验五:倒立摆的数学建模及稳定性分析
实验六:倒立摆的状态反馈控制
实验七:不同状态下状态反馈控制效果比较
实验八:倒立摆的LQR 控制
自动控制综合实验 2 总共 16 学时,其中球杆系统控制实验占用 8 学时,倒立摆
控制占用 8 学时。同学们完成实验后,要完成相应的实验报告,并及时提交。实验
报告内容包含实验名称、实验目的、实验内容、实验要求、实验原理、实验设备及
仪器、实验步骤、实验结果及分析、问题回答、心得体会、附上必要的实验原程序。
成绩评定:考勤 10+实验过程表现 40+实验报告 50=100 分

3
目 录
第一章 球杆系统介绍 ......................................................................................................................... 5
第二章 球杆系统的数学模型 ............................................................................................................ 7
2.1 球杆系统的数学模型 ......................................................................................................................... 7
2.2 伺服系统的数学模型 ......................................................................................................................... 8
实验一 小球位置的数据采集处理 .................................................................................................. 10
一、MATLAB Simulink 环境下的数据采集 ................................................................................... 10
二、实验内容 ............................................................................................................................................ 11
三、实验要求 .............................................................................................................................................. 14
四、书写实验报告 ..................................................................................................................................... 14
实验二 球杆系统的 PID 法控制 ...................................................................................................... 15
一、实验原理 ............................................................................................................................................ 15
二、实验内容 ............................................................................................................................................ 16
1. P 控制 ............................................................................................................................................ 16
2. PD 控制 ......................................................................................................................................... 17
3. PID 控制 ........................................................................................................................................ 18
三、实验要求 .............................................................................................................................................. 19
四、书写实验报告 ..................................................................................................................................... 19
实验三 球杆系统的根轨迹法控制 .................................................................................................. 20
一、实验原理 ............................................................................................................................................ 20
二、实验内容 ............................................................................................................................................ 22
1. 仿真实验 ..................................................................................................................................... 22
2. 控制测试实验 ........................................................................................................................... 23
三、实验要求 .............................................................................................................................................. 24
四、书写实验报告 ..................................................................................................................................... 24
实验四 球杆系统的频率响应法控制 .............................................................................................. 25
一、实验原理 ............................................................................................................................................ 25
二、实验内容 ............................................................................................................................................ 26
1. 仿真实验 ..................................................................................................................................... 26

4
2. 控制测试实验 ........................................................................................................................... 27
三、实验要求 .............................................................................................................................................. 28
四、书写实验报告 ..................................................................................................................................... 28
附录 1 实验报告封面和内容格式要求示例 .................................................................................. 29
附录 2 评分标准 .......................................................................................................................................... 31

5
Part 1 球杆系统
第一章 球杆系统介绍
球杆系统机械简单,结构紧凑,安全性高,采用智能伺服驱动模块和Windows
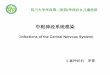
程序界面。球杆系统主要由以下部分组成,如下图1-1所示:
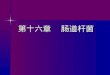
1. 机械部分:如图1-2所示。包含底座、小球、横杆、连杆、支撑杆、减速皮带轮、
直流伺服电机。通过电机调整横杆的倾斜角,使小球稳定平衡在横杆的某一位置;
2. 智能伺服驱动器:电机的驱动通过IPM智能伺服驱动器进行控制。IPM100是一
个智能的高精度、全数字的控制器,内嵌100W的驱动电路,适合于有刷和无刷
电机。基于反馈控制,在得到传感器信号后,对信号进行处理,给电机绕组施加
适当的PWM电压信号,一个相应的扭矩作用于电机轴,使电机开始运动,扭矩
的大小决定于程序中的控制算法。
3. 基于计算机的控制软件:控制软件主要采用MatLab Simulink平台。MatLab是一
个非常适合于自动控制的软件,集成了很多控制算法。
图 1-1 球杆系统主要组成部分
图 1

6
图 1-2 球杆机械部分的组成
球杆系统的闭环控制系统结构图如图1-3。球杆系统采用电位计检测小球的位
置,电位计安装在横杆上,小球位置对应的电压信号输送给IPM100智能驱动器的AD
转换器,如图1-4所示。
图1-3 球杆系统的控制结构
图1-4 小球的位置信号采集原理

7
第二章 球杆系统的数学模型
2.1 球杆系统的数学模型
为了使小球稳定平衡在横杆的某一位置,首先应建立球杆系统的数学模型。球
杆系统机械结构原理图如图2-1:
图2-1 球杆系统机械结构
连杆(lever arm)和同步带轮(gear)的连接点与齿轮中心的连线(长度为d)和水
平线的夹角为,横杆的长度为L。作为连杆的输入,带动横杆(beam)摆动,横杆的
倾斜角和之间的数学关系如式(2-1):
L
d (2-1)
角度和电机轴之间存在一个减速比n=4的同步带,控制器的设计任务是通过调
整角度θ,使得小球(ball)在横杆的中心位置附近平衡。
小球在横杆上滚动的动力学方程如式(1-2):
0-J 2
2
)(sin)(..
rmmgrmR
(2-2)
其中,r为小球在横杆上的位置,为输出;..
r 和
r 分别为小球在横杆上滚动的加速度
和速度;J为小球的转动惯量;R为小球半径;m为小球质量;g为重力加速度。
假设小球在横杆上的运动为滚动,且摩擦力忽略不计。因为期望角度在0附
近,因此可以在 0 、 0
处线性化, sin ,忽略2
项,并代入(2-2)式,
得到近似的线性方程:
)()(
..
mR
L
mgd
mR
mgr
22
JJ(2-3)

8
拉氏变换得球杆系统的传递函数:2
2
1
sm
R
JL
mgd
s
sr
)()(
)(
(2-4)
已知小球的质量m = 0.11kg;小球的半径R = 0.015m;重力加速度g=9.8m/s2;
横杆长L =0.4m;连杆和齿轮的连接点与齿轮中心的距离为d = 0.04m;小球的转动
惯量 6-2
10995
2 .
mRJ kg.m2。 代入(2-4)中,得球杆系统的传递函数为
22
2
701
ssm
R
JL
mgd
s
sr .
)()(
)(
(2-5)
球杆系统是一个典型的单输入单输出系统,其传递函数可以近似为一个两阶的
积分器。R(s)和(s)分别为系统输出(小球位置)和输入(齿轮角度)的拉氏变换。
开环系统的阶跃响应如图 2-2所示,可以看出,系统不稳定,需要对其实施闭
环控制与添加校正器。
图 2-2 球杆系统的开环响应
2.2 伺服系统的数学模型
图1-3中的电机、编码器和IPM100智能驱动组成直流伺服系统,形成了内闭环,
结构图如图2-3所示。

9
图2-3 直流伺服系统结构图
图中,Ka 是 IPM100 智能驱动的比例系数,Kf 是编码器的比例系数,Km 是电机
的比例系数,Tm 是电机的机电时间常数,Ur(s)是直流伺服系统的输入(电压), (s)
是直流伺服系统的输出(角速度),直流伺服系统的传递函数为:
1 2
( )W ( )
( )
a m
r m a m f
K Kss
U s T s s K K K
(2-6)
直流伺服系统是一个二阶系统,当电机的机电时间常数 Tm 很小可以忽略时,直流
伺服系统的传递函数可降阶为一阶系统,传递函数如式(2-7)所示。
1
( )W ( )
( )
a m
r a m f
K Kss
U s s K K K
(2-7)
所以,球杆系统是一个高阶系统。

10
实验一 小球位置的数据采集处理
为正常运行下面的程序,应将MatLab主窗口的Current Directory文本框设置为球
杆控制程序的系统文件夹, 如c:\\program file\ matlab\ R2010a \toolbox \googoltech\
ballbeam。
通过IPM Motion Studio和MATLAB采集小球的位置信号,以及对其进行数字滤
波器的设计。小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通
道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球
位置为0-400mm。
一、MATLAB Simulink 环境下的数据采集
MATLAB的数据采集和处理工具箱提供了强大的数据采集功能,可以很方便的
进行数据采集和处理的工作。 请参考以下步骤完成:
1. 在Simulink中打开“Googol Educational Products”工具箱,打开“Ball&Beam
\Control Demo\Ball&Beam Data Collection And Filter Design”演示程序。确认
串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界
面(图3-1),程序尚未完成:
图3-1尚未完成的数据采集处理程序界面
上面的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来
抑制扰动。请参考以下步骤完成剩余部分:
(1)添加、设置模块:
添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;
parameters为20。
添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65536.0。
添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General
页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;
分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.

11
(2)连接模块:
顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图3-2所
示:
图3-2 完成的数据采集处理程序界面
图3-2 中各模块的意义如下所述: S-Function模块用于采集IPM100控制器的
AD5通道的数值;Gain模块用于转化AD5通道的数值为小球的实际位置(0-
400mm); Noise Filter1为根据需要而设计的滤波器,点击Scope可以观测到滤波前
后的差异。
2. 运行控制程序,使小球在横杆上滚动,可以得到如下图3-3的实验结果:
图3-3 小球位置的数据采集处理
二、实验内容
1. 在MatLab Simulink中完成球杆系统的Data Collection And Filter Design模型
并运行,拨动小球在横杆上滚动,得到数据采集及滤波的实验结果,交Data.mdl图
形文件。
2.建立球杆系统的simulink模型
系统方程(2-2)、(2-3)式中包含r, dr/dt, 和 d/dt,使用非线性函数模块
来描述这些函数:
1)在Simulink中打开一个新的模型:

12
• 从commonly used blocks中插入一个积分模块。
• 在上面的积分模块右边再添加一个积分模块,并把两个模块连接起来。
• 在连接线上加上“d/dt(r)”的注释,在连接线的附近双击就可以添加文字。
• 从第二个积分模块的输出端画一条线,并标识为“r”
• 从commonly used blocks模块库中插入一个out模块并和“r”信号线连接。这
就是系统的输出。
• 更改“out”的标识为“r”。
2)接下来插入一个包含向量 [r d/dt(r) alpha d/dt(alpha)]的函数,输出为d/dt(r):
• 从user-defined functions模块库中插入一个Fcn模块,并把它的输出和第一个积
分模块的输入相连。
• 双击Fcn模块,修改函数如下:
(-1/ (J/(R^2) +m))*(m*g*sin (u [3])-m*u [2]*(u [4]) ^2)
此函数模块的输入为向量u,每个元素被指定u[1],u[2]等,设定u[1]=r,
u[2]=d/dt(r), u[3]=alpha,u [4]=d/dt(alpha)。
•关闭对话框,改变Fcn模块的名称为“Ball-Beam Lagrangian Model”,
3) 构造函数的输入向量u,它可以通过积分器的输出信号以及使用一个Mux
模块实现:
•从commonly used blocks中插入一个Mux模块,并把其输出和Ball-Beam的输入相
连。
• 双击Mux模块,改变输入的个数为4,这样,Mux模块就有了4个输入。选中
display option:none,可将Mux模块变成无色填充。
• 将Mux模块的第二个输入和d/dt(r)信号相连(移动鼠标时按住Ctrl键即可绘制分
岔线)。
• 将Mux模块的第一个输入和r信号相连。
4)通过theta信号构造alpha和d/dt (alpha)信号:
• 在窗口的左边,从source模块库中插入一个模块In1,改变名称为“theta”。
• 从commonly used blocks中插入一个Gain模块并和theta模块相连,改变名称为
“d/L”。
• 将Gain模块的输出和Mux模块的第三个输入相连,标注为“alpha”。
• 从continuous模块库中插入一个Derivative模块,并置于alpha信号线的下面。
• 将Derivative模块的输入和Gain模块的输出相连。
• 将Derivative模块的输出和Mux模块的第四个输入相连。
得到如图3-4所示的球杆的simulink模型。保存模型为"ballbeam.mdl", 运行开环仿
真可以得到系统的开环响应,下一步把它封装为一个子模块。

13
r1
r
Mux1
s
Integrator1
1
s
Integrator
d/L
Gain
du/dt
Derivative
f(u)
Ball-beam
Largrangian
Model
1
theta
d/dt(r)alpha
图3-4 球杆的simulink模型
5)封装子模块
• 创建一个新的模型窗口(从Simulink的File菜单选择New或是按下Ctrl-N)。
• 从commonly used blocks中模块库中插入一个“Subsystem”模块。
• 双击Subsystem模块打开,可以看到一个新的模块窗口,标题为Subsystem。
• 打开前面的ballbeam.mdl窗口,选择所有的模块和连线。 复制并粘贴到
Subsystem窗口中。
• 关闭Subsystem窗口,可以看到一个没有标题的子模块,该模块有一个标识为
“theta”的输入和一个标识为“r”的输出。
• 选择模块并拖动角点,改变模块的大小,使得
• 改变“Subsystem”的模块名称为“Ball and Beam Model”。
6)运行开环仿真,得到系统的开环响应
•从Sources模块库中插入一个“Step”模块,并将它和“Ball and Beam”模块的
输入相连。
• 双击“Step”模块,修改“Step Time”为0,然后关闭。
• 从“Sinks”模块中插入一个“Scope”模块,并将它和“Ball and Beam”模块相
连。
得到如图3-5所示的球杆开环系统。
图3-5 球杆开环系统
•在得到阶跃信号响应前,需要先设置系统的物理参数,在MATLAB的命令
行中输入:
m = 0.11;
R = 0.015;
g = -9.8;
L = 0.4;

14
d = 0.04;
J = 2*m*R^2/5;
•现在可以开始仿真,点击“Simulation”菜单的“Start”开始仿真,运行完
成后,双击“Scope”打开运行结果。 如图3-6所示。
图3-6 球杆开环系统的阶跃响应
从上图中可以看出,开环系统是一个不稳定的系统,小球将滚动到横杆的一端。
三、实验要求
1)在MatLab Simulink中完成球杆系统的Data Collection And Filter Design模型并
运行,拨动小球在横杆上滚动,得到数据采集及滤波的实验结果,交Data.mdl图形
文件。
2)在MatLab Simulink中完成球杆开环系统的simulink模型、封装模型和阶跃响
应,结果要验收并放在实验报告中。
3)思考:在 MATLAB 中,将球杆系统的 simulink 模型转化为相应的状态空间
模型或者传递函数模型。(MATLAB 函数 linmod(),ss2tf( ))
四、书写实验报告
实验报告内容包含实验名称、实验目的、实验内容、实验要求、实验原理、实验设备及仪
器、实验步骤、实验结果及分析、问题回答、心得体会、附上必要的实验原程序。
实验报告格式要规范。

15
实验二 球杆系统的 PID 法控制
由实验一可知,球杆系统是一个不稳定的系统,需要对小球的位置添加一些控
制方法或控制器,使小球能稳定在横杆上。假设控制的指标要求如下:
♦ 调整时间小于1秒(2%误差);
♦ 超调量小于10%
下面将介绍几种适合于此类问题的控制器设计方法: PID控制、根轨迹法、频
率响应法。
一、实验原理
含有控制器、球杆系统结构和小球位置反馈的系统框图如下图4-1所示:
图4-1 闭环比例控制结构图
图中,Xd(s)为小球目标位置的拉普拉斯变换;W(s)为球杆系统的传递函数,
2 2 2
2
( ) 1 c 0.7W( )
( )( )
r s mgds
Js s s sL m
R
;
PID控制器的传递函数为: 2
2
s
KsKsKsK
s
KKsG IPD
DI
PC
)( (4-1)
式中,KP, K
I 和K
D为PID控制器的比例,积分和微分比例。
比例P控制可改变信号的增益但不影响其相位。用于串联校正时,可提高系统
的开环增益,减小稳态误差,但会降低稳定性。
PD控制用于串联校正时,可使系统增加一个开环零点,提高系统的相角裕度,
有助于动态性能的改善。
PI控制用于串联校正时,可使系统增加一个开环极点和开环零点。位于原点的
开环极点可提高系统的型别,以消除或减小系统的稳态误差,而增加的负实数零点
可缓和极点对系统的稳定性产生的不利影响。
PID控制:选择适当的参数Ki和KD可使系统增加两个负实数零点和一个位于原
点的开环极点。与PI控制器相比,除了同样具有提高系统稳态性能的优点外,还对
提高系统的动态性能有更大的优越性。

16
二、实验内容
1. P控制
P控制器为:GP (s)=KP (4-2)
闭环系统的传递函数为: p
2
p
( ) ( )( )
( ) 1 ( ) ( ) s +
P
D P
cKG s W sX s
X s G s W s cK
(4-3)
这是一个二阶系统。
(1) 仿真实验
假设比例增益KP=3,闭环系统的传递函数可以通过以下的MATLAB命令进行仿真。
m = 0.11;
R = 0.015;
g = -9.8;
L = 0.4;
d = 0.04;
J = 2*m*R^2/5;
K = (m*g*d)/(L*(J/R^2+m)); %simplifies input
num = [-K];
den = [1 0 0];
plant=tf(num,den);
kp = 3;
sys_cl=feedback (kp*plant, 1);
step(0.2*sys_cl)
在MATLAB环境下运行文件。 阶跃响应如下图4-2所示:
图4-2 P控制下(K
P=3)的球杆系统的单位阶跃响应
可以看出,添加P控制器后,球杆系统并不能稳定,会保持等幅振荡。改变Kp 的
值后,系统还是不稳定的。
(2) 控制测试实验
i. 在MATLAB Simulink环境下运行演示程序。在Simulink中打开c:\\program file\
matlab\R2010a \toolbox \googoltech\ ballbeam \BallBeam PID,运行PID程序,确认串
行口COM Port为1后,双击Start Real Control模块,打开控制程序界面,如图4-3所示。

17
图4-3 PID控制演示界面
ii. 将控制器设置为P控制器。
iii. 设置目标位置为200mm。
iv. 用手指将小球拨动到100mm的地方。
v. 松开小球,系统将对小球的位置进行平衡。
vi. 改变并观察其响应,实验结果如下,比较实验结果和仿真结果的区别。(建
议参数不要设置过大)
图4-4 P控制下的小球位置实验结果
2. PD控制
PD控制器的传递函数为: sKKsG DPPD )( (4-4)
闭环系统的传递函数为:
PD
DP
PD
PD
d cKscKs
sKKc
sWsG
sWsG
sX
sX
2
)(
)()(1
)()(
)(
)( (4-5)
(1) 仿真实验
令kp1 = 6, kd1 = 6,编写MATLAB的M文件,运行仿真观察阶跃响应的仿真结
果,如图4-5所示。可以看出,闭环系统是一个稳定的系统,但是超调和稳定时间都
过大。写出超调量1%和调整时间ts2。
改变控制参数KP2, KD2,编写MATLAB的M文件,运行仿真观察阶跃响应的仿
真结果。记录仿真曲线,计算超调量2%和调整时间ts2。

18
改变控制参数KP3, KD3,编写MATLAB的M文件,运行仿真观察阶跃响应的仿真结果。
记录仿真曲线,计算超调量3%和调整时间ts3。
由仿真运行曲线和性能指标,分析控制参数的作用。
图4-5 PD控制时的球杆系统的单位阶跃响应
(2)控制测试实验
i.在MATLAB Simulink中运行PID控制演示程序Ballbeam PID。
ii. 切换控制器为PD控制器,并设置参数:kp=6, kd =6。
iii. 设置目标位置为200mm
iv. 移动小球的位置,使其大概在50mm的地方。
v. 松开小球,系统将试图稳定小球的位置。
vi.观察其响应并记录响应图,计算性能指标。
vii. 改变KP和KD ,和matlab仿真设置相同,观察其响应并记录响应图,计算性
能指标并使其满足控制目标。
在PD控制器的作用下,系统可以很快的平衡,但是稳态误差比较大,分析小球
的位置改变和齿轮转动角度的变化之间的关系,对比实验结果和仿真结果的区别。
图3-6 PD控制器控制结果
3.PID控制
PID控制器的传递函数为: s
KsKsKsG IPD
PID
2
)( (4-6)
闭环系统的传递函数如下所示:
IPD
IPD
PID
PID
d cKscKscKs
KsKsKc
sWsG
sWsG
sX
sX
23
2 )(
)()(1
)()(
)(
)((4-7)
(1) 仿真实验

19
设置控制参数: KP1=10, KI1=1, KD1 =10,编写MATLAB的M文件,运行仿真观察阶
跃响应的仿真结果。记录仿真曲线,计算超调量1%和调整时间ts1。
改变控制参数:KP2=10, KI2=1, KD2 =20,编写MATLAB的M文件,运行仿真观察阶
跃响应的仿真结果。记录仿真曲线,计算超调量2%和调整时间ts2。
改变控制参数:KP3=15, KI3=1, KD3 =40,编写MATLAB的M文件,运行仿真观察阶
跃响应的仿真结果。记录仿真曲线,计算超调量3%和调整时间ts3。
由仿真运行曲线和性能指标,分析控制参数的作用。
(2)控制测试实验
i.在MATLAB Simulink中运行PID控制演示程序Ballbeam PID。
ii. 切换控制器为PID控制器,并设置参数:KP =10, KI =1, KD =10。
iii. 设置目标位置为200mm
iv. 移动小球的位置,使其大概在50mm的地方。
v. 松开小球,系统将试图稳定小球的位置。
vi.观察其响应并记录响应图,计算性能指标超调量%和调整时间ts。
vii. 改变KP、KI和KD 值,和matlab仿真设置相同,观察其响应并记录响应图,
计算性能指标。
三、实验要求
1. 完成 P 控制下三种不同的 Kp 参数下 Ballbeam 系统的 Matlab 仿真和实际测试。
2. 完成 PD 控制下三种不同的 Kp、KD参数下 Ballbeam 系统的 Matlab 仿真和实际
测试。
3. 完成 PID 控制下三种不同的 Kp、KD、KI参数下 Ballbeam 系统的 Matlab 仿真和
实际测试。
4. 记录各种控制方法时的仿真曲线、实验曲线,及计算响应的性能指标。
5. 分析参数的作用,分析仿真和实验的差别的原因。
6. 指导老师验收实验结果
四、书写实验报告
实验报告内容包含实验名称、实验目的、实验内容、实验要求、实验原理、实验设备及仪
器、实验步骤、实验结果及分析、问题回答、心得体会、附上必要的实验原程序。
实验报告格式要规范。

20
实验三 球杆系统的根轨迹控制
球杆系统的控制指标要求如下: 调整时间小于1秒(2%误差);超调量小于
10%。
一、实验原理
根轨迹的主要思想就是通过分析系统的开环零极点位置,来分析闭环系统的特
性。通过增加极点或零点的方法(校正器),根轨迹以及闭环系统的响应都将发生
改变。 添加根轨迹法超前校正器后,闭环系统如下图5-1。
图5-1 根轨迹法超前校正的闭环系统
已知球杆系统的传递函数2 2
2
( ) 1 0.7W( )
( )( )
r s mgds
Js s sL m
R
。MATLAB中使用
函数rlocus( ),以绘制系统的根轨迹图,如图5-2所示。校正前的球杆系统具有两个
极点,其根轨迹从原点开始沿虚轴指向无穷。
图5-2 球杆系统的根轨迹图
根轨迹设计步骤如下:
1. 确定闭环期望极点:
闭环期望极点(主导极点)s1的位置必须在s平面的左半平面,如图5-3所示。
由最大超调量 %% 10100%21
e ,可以得到:ζ0. 6。
由=cos(-)可以得到=126。

21
又由 stn
s 144
.,可以得到:n =7.35rad/s,于是可以得到期望的闭环极点为:
7.35 (cos±jsin)=-4.41±j5.95
2.计算超前校正装置的传递函数
未校正系统的根轨迹在实轴和虚轴上(即重极点在坐标原点上),不通过闭环
期望极点,因此需要对系统进行超前校正,设控制器的传递函数为:
)()( 11
1
a
ps
zs
aTs
TsasG
c
cc 。zc、pc分别为校正器零、极点。以下算法的特
点是:添加校正器后的增益损失最小。
图4-3 主导极点s1与校正器的零点、极点
由图5-3的几何关系,可得校正装置提供的相角。当相位裕量为0时,c=72。当
相位裕量为30时,c=102。
当相位裕量为0时:
992
272
zpcc
;
零、极点值为: 52141
10731
1 .tan
)Im()Re(;.
tan
)Im()Re(
p
c
z
c
ssp
ssz
控制器的传递函数5214
073K
.
.)(
s
ssGc
3.计算校正后系统的开环传递函数
2
70
5214
073
ss
sKsWsGsG cK
.
).(
).()()()(
4. 计算增益K
主导极点还应满足闭环特征方程的幅值条件: 170
5214
0732
d
d
ss
sK
d
.
).(
).(,由
sd=-4.41±j5.95,得到K =150.7
5. 计算系统的控制器: 5214
0733138Gc
.
).(.)(
s
ss

22
6. 绘制校正后系统的根轨迹图,分析系统的阶跃响应。
二、实验内容
1. 仿真实验
上述过程手动计算比较复杂,可以采用编程程序自动计算得到。 例程如下: clear
num = [0.7]; %未校正系统传递函数,前面程序得到的数值
den = [1 0 0];
g0 = tf(num,den);
sigma = 10; %超调量(百分比)
ts = 1; %调整时间
sigma = sigma/100;
zeta = sqrt(1/(pi^2/log(sigma)^2+1)); %二阶系统参数ζ、ωn
wn = 4/(ts*zeta);
s1_real = -wn*zeta; %由二阶系统算出的闭环系统主导极点
s1_imag = wn*sqrt(1-zeta^2);
s1 = s1_real+j*s1_imag;
phi = angle(s1); %主导极点的相角90<<180
num_s1 = polyval(num, s1);
den_s1 = polyval(den, s1);
g0_s1 = num_s1/den_s1; %未校正系统传递函数在主导极点上的值
theta = angle(g0_s1); %未校正系统传递函数在主导极点上的相角θ
phi_c = pi-theta; %校正器的相角cϕ可由主导极点上闭环特征方程的
%相角条件确定
theta_z = (phi+phi_c)/2;
theta_p = (phi-phi_c)/2;
z_c = real(s1)-imag(s1)/tan(theta_z); %校正器零、极点
p_c = real(s1)-imag(s1)/tan(theta_p);
num_c = [1 -z_c];
den_c = [1 -p_c];
gc = tf(num_c, den_c) %校正器传递函数,句尾不写分号
numc_s1 = polyval(num_c, s1);
denc_s1 = polyval(den_c, s1);
gc_s1 = numc_s1/denc_s1; %校正器传递函数在主导极点上的值
K = 1/(abs(g0_s1*gc_s1)) %根据主导极点上闭环特征方程的幅值条件
%求增益,句尾不写分号
rlocus(g0*gc) %根轨迹图
close = feedback(K*g0*gc, 1); %闭环负反馈

23
figure
t = 0: 0.01: 10; %时间标尺
step(close, t) %校正后系统单位阶跃响应
运行结果如下:
图5-4 球杆系统的根轨迹法控制结果
2. 控制测试实验
i. 在MATLAB Simulink中打开c:\\program file\ matlab\ R2010a \toolbox
\googoltech\ ballbeam\Root Locus Control,运行Root Locus Simu程序,确认串行口
COM Port为1后,双击Start Real Control模块,打开控制程序界面,如图5-5所示。

24
图5-5 根轨迹法控制程序界面
ii.选通并打开其中的零、极点-增益型模块,将其参数设置为仿真得到的数据
K,zc,pc。
iii. 设置目标位置为200mm。
iv. 移动小球的位置,使其大概在50mm的地方。
v. 松开小球,系统将试图稳定小球的位置。
vi.观察其响应并记录响应图,计算性能指标超调量%和调整时间ts。
三、实验要求
1. 完成超调量1%=10%, 调整时间 ts=1s,相位裕量=30时根轨迹法控制时的控
制器的 Matlab 仿真设计和球杆系统实际测试。
2. 完成超调量2%=5%,调整时间 ts=1s,相位裕量=30时根轨迹法控制时的控制
器的 Matlab 仿真设计和球杆系统实际测试。
3. 完成超调量3%=1%,调整时间 ts=1s,相位裕量=30时根轨迹法控制时的控制
器的 Matlab 仿真设计和球杆系统实际测试。
4. 记录各种控制参数时的仿真曲线、实验曲线,及计算响应的性能指标。
5. 分析参数的作用,分析仿真和实验的差别的原因。
6. 仿真实验部分:用根轨迹法设计校正器,编写并运行 M 文件,获得校正后根轨
迹图及阶跃响应图,获得相关数据以备实验用。指导教师验收图形与数据,交程序
清单。
7. 控制测试实验部分:指导老师验收实验结果
说明: 一般来说,提高增益有利于小球运动的快速性,但会加大超调量。常数模块
REFPOS1一般是选通的,是小球的参考位置,单位mm。 增益模块Real Position1用
于调节小球稳定后的实际位置与参考位置的差异。有时会出现相同情况下,小球位
置不一,原因很多,可能是元器件参数漂移,或是机械系统阻尼过大,可不必理会。
若小球死在非平衡位置,将其拨离死区即可。
四、书写实验报告
实验报告内容包含实验名称、实验目的、实验内容、实验要求、实验原理、实验设备及仪
器、实验步骤、实验结果及分析、问题回答、心得体会、附上必要的实验原程序。
实验报告格式要规范。

25
实验四 球杆系统的频率响应法控制
一、实验原理
频率响应法的主要思想是根据开环传递函数的Bode图,给系统添加一个控制器,
改变开环系统的Bode图,从而改变闭环系统的响应,使其达到期望的性能。添加频
率响应法超前校正器后,闭环系统如下图6-1:
图6-1 频率响应法超前校正的球杆闭环系统
已知球杆系统的传递函数2 2
2
( ) 1 0.7W( )
( )( )
r s mgds
Js s sL m
R
。在MATLAB中使
用函数bode( )仿真和绘制系统的bode图,如图6-2所示。
图6-2 未校正系统的BODE图
从上图可以看出,系统的相位裕量为0,从相位裕量的定义可以得到,开环系统
需要一定的相位裕量,才能使闭环系统稳定,因此,开环系统是不稳定的,需要增
加系统的相位裕量,可以给系统添加一个超前校正器,改善系统的响应。
频率响应法设计步骤如下:
设控制系统需要的超调量 %% 10100%21
e ,可以得到:ζ0. 6。
1. 计算相位裕量:

26
59241
2
24
1
arctan)( c
2. 计算校正器最大超前角:因系统校正前相位裕量为0,故:=。
3. 计算控制器的分度系数a和时间常数T:
控制器的传递函数1
1
aTs
TsKsGc )( ,使系统在1/aT 至 1/T的转角频率范围内增
加相位裕量。预设带宽中心频率 c=1.0rad/s,则 07501
1.
sin
sin
a ,
sa
Tc
6531
.
4. 计算控制器的传递函数:1270
1653
s
sKsGc
.
.)(
5. 预设校正器的增益K=2,分析校正后系统的Bode图和时域响应。
二、实验内容
1. 仿真实验
上述过程手动计算比较复杂,可以采用编程程序自动计算得到。在MATLAB中
输入如下的程序:
clear
num = [0.7]; %未校正系统传递函数,前面程序得到的数值
den = [1 0 0];
g0 = tf(num,den);
sigma = 10; %超调量(百分比)
sigma = sigma/100;
zeta = sqrt(1/(pi^2/log(sigma)^2+1)); %二阶系统阻尼比ζ
gamma = atan(2/sqrt(sqrt(1/zeta^4+4)-2)); %相位裕量
phi = gamma; %相位超前角
wc = 1 %频率带宽的中心频率,句尾不写分号
a = (1-sin(phi))/(1+sin(phi)); %分度系数
T = 1/(wc*sqrt(a)); %时间常数
numlead = [T 1]; %校正器传递函数
denlead = [a*T 1];
gc = tf(numlead, denlead) %句尾不写分号
K = 2 %增益,句尾不写分号
bode(K*gc*g0) %校正后系统Bode图
close = feedback(K*gc*g0, 1); %闭环负反馈
figure
t = 0: 0.01: 10; %统一时间标尺

27
step(close, t) %校正后系统闭环单位阶跃响应
再分别选取中心频率c =2、c =3重复运行,以便对结果进行比较。添加超前
校正器后的Bode图如图6-3所示。单位阶跃响应仿真结果如图6-4所示:
图6-3 添加超前校正器后的系统BODE图 图6-4 超前校正后系统的单位阶跃响应
2.控制测试实验
i. 为正常运行下面的程序,应将MatLab主窗口的Current Directory文本框设置为球杆
控制程序的系统文件夹:c:\\program file\ matlab\R2010a\toolbox\ googoltech\
ballbeam\BallbeamFreqResponse。运行Frequency Response Control程序,确认串行口
COM Port为1后,双击Start Real Control模块,打开控制程序界面,如图6-5所示:
图6-5 MATLAB SIMULINK 中频率响应控制界面
ii. 分别打开传递函数型模块,将其参数设置为前面仿真时得到的数据。选通其中
的模块点击运行程序。若小球往返滚动呈振荡态势,需要减小增益值以抑制超调量,

28
耐心调整直到小球稳定。比较各组数据的实验结果。
iii. 设置目标位置为200mm
iv. 移动小球的位置,使其大概在50mm的地方。
v. 松开小球,系统将试图稳定小球的位置。观察其恢复原位的过程。
vi.观察并记录响应图,计算性能指标超调量%和调整时间ts。
三、实验要求
1. 完成 K=2, c=1rad/s 时频率响应法控制时的 Matlab 仿真设计和球杆系统实际测
试。
2. 完成 K=2, c=2rad/s 时根轨迹法控制时的控制器的 Matlab 仿真设计和球杆系统
实际测试。
3. 完成 K=2, c=3rad/s 时根轨迹法控制时的控制器的 Matlab 仿真设计和球杆系统
实际测试。
4. 完成 K=4, c=3rad/s 时根轨迹法控制时的控制器的 Matlab 仿真设计和球杆系统
实际测试。
5. 记录以上4种情况下的控制器的传递函数,球杆系统频率响应法控制时仿真曲线、
实验曲线,及计算响应的性能指标。
6. 分析参数的作用,分析仿真和实验的差别的原因。
7. 仿真部分:用频率响应法设计校正器,编写并运行 M 文件,获得校正后 Bode 图及
阶跃响应图,获得相关数据以备实验用。指导教师验收图形与数据,交程序清单。
8. 实验部分:指导老师验收实验结果
四、书写实验报告
实验报告内容包含实验名称、实验目的、实验内容、实验要求、实验原理、实验设备及仪
器、实验步骤、实验结果及分析、问题回答、心得体会、附上必要的实验原程序。
实验报告格式要规范。

29
附录 1 实验报告封面和内容格式要求示例
自动控制综合实验 2
实验报告
实验课程名称(Part 1 球杆系统 GBB1004)
姓 名
学 院 自动化学院
专 业
班 级
学号、班内序号
指导教师
2018 年 月

30
附录 1
实验名称
一、实验目的 1.1 XXX
1.1.1 XXX (正文)
1.1.2 XXX (正文)
二、实验内容及任务 2.1 实验内容 (正文)
2.2 实验任务 (正文)
三、实验原理
四、实验方法及步骤
五、实验结果及分析
六、问题与讨论
七、其他
实验报告包含以下的内容。可根据实验的具体情况和要求进行适当调整。
(1) 实验名称,目的,要求,设备等
(2)有软仿真结构图、结果及分析;
(2) 实验数据及图表齐全;
(3) 实验结果及分析;
(4) 回答思考题;
(5) 实验研究的体会和收获,对实验的意见或建议。
一级标题:黑体三号;加粗;居中
1)二级标题:黑体四号;加粗;顶格;序号
和标题之间空一格
2)三级标题及以下标题:黑体小四号;加粗;
“首行缩进”2 字符;序号和标题之间空一格;
1)正文:宋体小四号字;段落 “首行缩进”2 字符;单倍行距。
2)图:每一图有序号和简短确切的图名;图应该有横、纵坐标及
名称;图中的标注可用中文或英文,中文字体为五号楷体,英文
字体为五号 Times New Roman。图序号采用阿拉伯数字分章依序
编排。如图 2-1 为第二章第一图。图序号放在图的下方。图应工
整、清晰、规范、示意图应清楚的反映官图示内容。
3)表:表序号采用阿拉伯数字分章依序编排。如表 2-1 为第二章
第一表。每一表有序号和简短确切的表名;表序号和表名放在表
的上方。中文字体为五号楷体,英文字体为五号 Times New
Roman。表内按规定的符号标注单位。
4)公式:公式序号采用阿拉伯数字分章依序编排。如式(2-1)
为第二章第一式。标注在该公式所在行的最右侧。公式书写方式
应在文中相应位置另起一行居中横排,采用插入对象公式编
辑器进行正确书写。

31
附录 2 自动控制综合实验(2)评分标准
考核方式:采用平时成绩和期末成绩进行综合考核。其中:
1. 平时成绩主要包含出勤、课堂操作和验收等。综合考虑,按照验收顺序给分。
2. 期末成绩主要是指实验报告,按照其完整性和正确性打分,本年度课程使用
两个不同的实验平台,学生按照指导书在每个实验平台完成相应的实验,共四次课。
评分标准如下:
(一)优秀(90-100 分):
1.报告中对实验过程叙述详细、概念正确,语言表达准确,结构严谨,条
理清楚,逻辑性强,自己努力完成,没有抄袭。
2.对实验过程中存在问题分析详细透彻、规范、全面;结合已学知识内容
描述正确、深刻。
3.实验心得体会深刻、有创意,论述合理详细,有自己的个人见解和想法。
(二)良好(80-89 分):
1.报告中对实验过程叙述较详细、概念正确,语言表达较准确,结构较严
谨,条理较清楚,逻辑性较强,自己努力完成,没有抄袭。
2.对实验过程中存在问题分析比较详细透彻、规范、全面;结合已学知识
内容描述较正确、深刻。
3.实验心得体会较深刻、有创意,论述合理较详细,有自己的个人见解和
想法。
(三)中等(70-79 分):
1.报告中对实验过程叙述较详细,自己努力完成,没有抄袭。
2.对实验过程中存在问题有较详细的分析,但不全面。
3.实验心得体会不够深刻,缺乏创意。
(四)及格(60-69 分):
1.报告中对实验过程叙述简单,没有抄袭。
2.对实验过程中存在问题有简单分析和描述。
3.实验心得体会不够深刻,缺乏创意。
(五)不及格(59 分,或具备下面一项者为不及格):
1.没有交报告。
2.基本上是抄袭。
3.内容太空泛,太简单。
通过计算该生两部分成绩,本学期的总评成绩按照一定比例折算可得,具体计
算公式如下:
成绩评定:考勤 10+实验过程表现 40+实验报告 50=100 分