Embed Size (px)
DESCRIPTION
Совместное поведение агентов в динамически меняющейся среде, основанное на субъективных картах. Крупадерова Валентина, 545 гр. О чем?. О представлении карт субъектов ( subjective map ), которые позволяют роботам в мультиагентной системе принимать решения в динамической враждебной среде - PowerPoint PPT Presentation
Citation preview

Совместное поведение агентов в , динамически меняющейся среде
основанное на субъективныхкартах , 545 .Крупадерова Валентина гр
?О чем
О представлении карт субъектов (subjective map), которые позволяют роботам в мультиагентной системе принимать решения в динамической враждебной среде
О методе организации совместного поведения роботов на основе карт субъектов
О сравнении этого метода со стандартным методом, с или без разделения информации

Карта субъектов Что это?
Карта субъектов – это карта среды, которую каждый агент создает и поддерживает сам, без учета реального соответствия представлений у
всех агентов
Что в них хорошего?Из-за свой субъективности такие карты не зависят
от некорректной информации, которая может поступить от других агентов
Коммуникации в мультиагентныхсистемах
Предполагается, что в мультиагентных системах коммуникации помогают роботам получать знания об окружающей среде. При этом роботам нужна общая система координат. Например, мировая. Тогда, чтобы преобразовать результаты своих наблюдений в мировые координаты, каждый робот должен локализовать себя. И ошибки локализации часто бывают слишком большие, чтобы их игнорировать
Робот может вычислить свою позицию с помощью навигационного счисления даже в незнакомой среде, но накапливающимися ошибками пренебречь нельзя
Общая система позиционирования
Kurazume и др. [2] предложили принцип общей системы позиционирования для группы роботов, чтобы бороться с ошибками навигационного счисления. Идея, предложенная в [2] - все время оставлять несколько роботов стоять неподвижно, чтобы остальные могли из использовать как вехи. Тогда навигационного счисления вообще можно избежать. Но в этом случае роботы вынуждены двигаться группами и должны быть оснащены специальными приборами, чтобы точно измерять относительные позиции роботов
: Разделение информации метод
Способы локализации роботов и получения их пространственной конфигурации через разделение информации представленные в [3, 4, 5]. Kato и др. [4] и Nakamura и др. [5], используют геометрические ограничения на положение роботов.
Роботы одновременно видят друг друга находят пространственные конфигурации,
сформированные по их позициям и удовлетворяющие неравенству треугольника
используют разделяемую карту окружающей среды.
:Разделение информации минусы
Для определения глобальных координат, позиция одного робота используется в качестве базовой, поэтому ошибки локализации не влияют на обмен информацией, но зависят от того, как базовый робот установил свои координаты
Чтобы одновременно обозревать несколько роботов, используются всенаправленные (omnidirectional) камеры, вместо обычных, с ограниченным числом углов обзора. Так что для роботов, использующих обычные камеры, этот метод не подходит.
Объединенный метод локализации
Даже при условии, что есть методы для устранения ошибок локализации, все равно остается вопрос – как соединить карты нескольких роботов и как поддерживать общую карту. Средневзвешенное информации от каждого робота может работать, только если ошибки невелики и промоделированы. Fox et al. [6] предлагают объединенный метод локализации Маркова для систем роботов. Каждый робот находи свои координаты и использует данные других роботов, основанные на глобальном позиционировании в мировой системе координат.
: Объединенный метод локализации плюсы иминусы
Этот метод не предполагает, что все роботы будут видеть друг друга одновременно, но предполагает, что ошибки обзора могут быть смоделированы и затратами на коммуникации в системе можно пренебречь
Но если у одного робота произойдет серьезная непредусмотренная ошибка в локализации , это отразится на карте, используемой всеми роботами. Сложно назначить веса или моделировать так, чтобы этого избежать, потому что всегда есть ошибки, которые проектировщик не учел , и во многих ситуациях робот не может распознать ошибки моделирования
Восстанавливаемая локализация Scott и др. [7] предложили восстанавливаемую
локализацию по Монте-Карло. Робот сбрасывает свои последние наблюдения и восстанавливает предыдущее значение локализации, если обнаруживает значительное несоответствие данных вычисленных координат и измерений сенсоров. Экспериментальные результаты были показаны в среде RoboCup. Этот метод вычисления своих координат достаточно надежен, но при восстановлении предыдущей локализации может быть задержка, и тогда это отразится на всех роботах, которые используют общую карту.

: Метод субъективных картобоснование
Новый подход: использовать субъективные карты вместо разделяемых карт
Предполагается, что относительное положение роботов друг относительно друга важнее их абсолютного положения в среде и роботы могут измерить относительное положения объектов более точно, чем абсолютное.
Столкновения, аварии или другие изменения в среде, которыми нельзя пренебречь, не повлияют на карту.
Поле потенциалов на субъективных картах определяется в терминах подзадач, таких как ведение мяча или удар в створ ворот, и это поле меняется динамически, так что робот может решать, что делать в конкретный момент

Генерация субъективных карт В футболе роботов
Есть игроки той же команды и противники, мяч, некоторые ориентиры на поле
Робот может различать «своих» и «чужих», но идентифицировать других роботов не может.
Каждый робот делает следующее Локализует себя Оценивает положение мяча, товарищей по команде и
противников в глобальной система координат, если видит кого-то из них
Рассылает результаты локализации и оценки «своим» Получает от них аналогичные сообщения
Генерация субъективных карт
Конструирует субъективную карту Если оба, робот и другой игрок его команды , видят мяч, робот
сдвигает координаты, переданные ему этим игроком, основываясь на положении мяча, и добавляет данные на субъективную карту
В другом случае, робот просто добавляет по чужим данным на свою карту все объекты, которые не видит
Вычисляет поле потенциалов и определяет свои дальнейшие действия
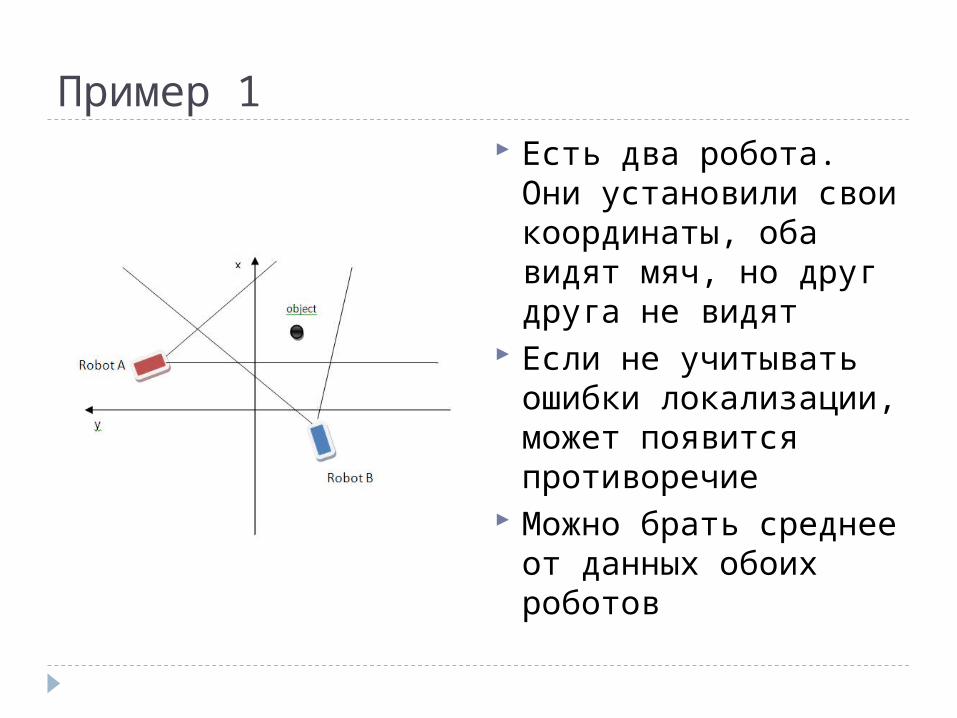
1Пример Есть два робота. Они
установили свои координаты, оба видят мяч, но друг друга не видят
Если не учитывать ошибки локализации, может появится противоречие
Можно брать среднее от данных обоих роботов
1Пример
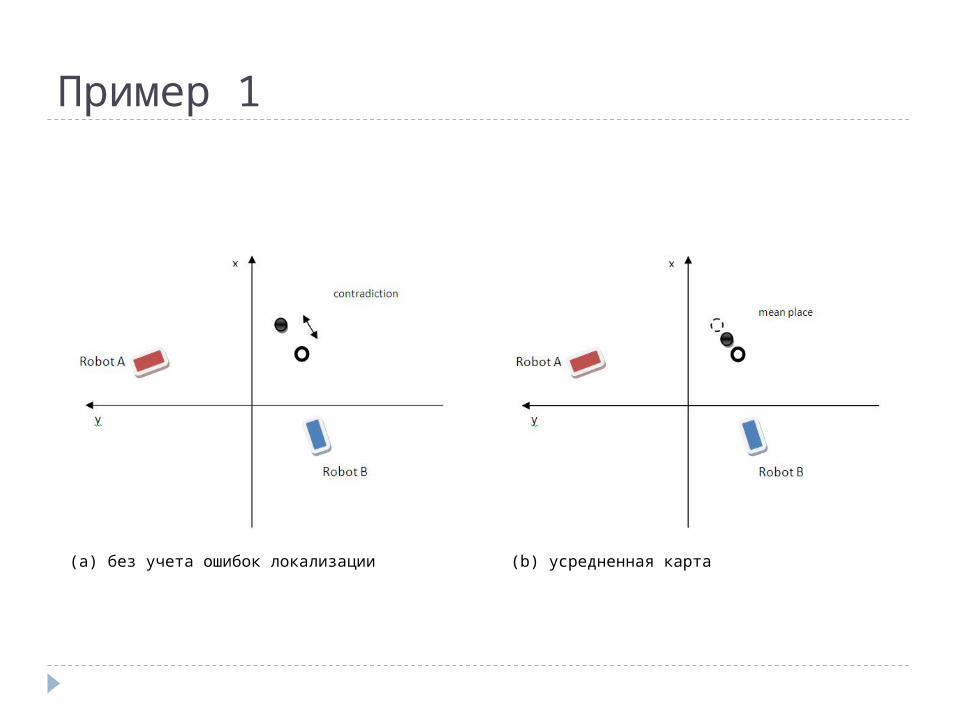
(а) без учета ошибок локализации (b) усредненная карта
Усреднение
Если использовать взвешенное среднее от положения мяча, то можно получить одинаковую картинку для обоих роботов
Но усредненное положение может не совпадать с действительным положением
: Усреднение минусы Данные для конкретного робота из-за усреднения могут
ухудшиться, так как в этом случае используется разделяемая информация
Во многих случаях нам не нужны глобальные координаты роботов – нужно только их относительное положение
Ситуация может ухудшится, если роботы видят друг друга. Придется предположить, что несколько роботов могут видеть друг друга одновременно, чтобы использовать какие-то геометрические ограничения. А для движущихся роботов с камерами с ограниченным числом углов обзора это предположение не выполнится.

?Что делать Будем предполагать, что каждый робот считает свои
измерения верными, строит субъективную карту и определяет по ней свои действия
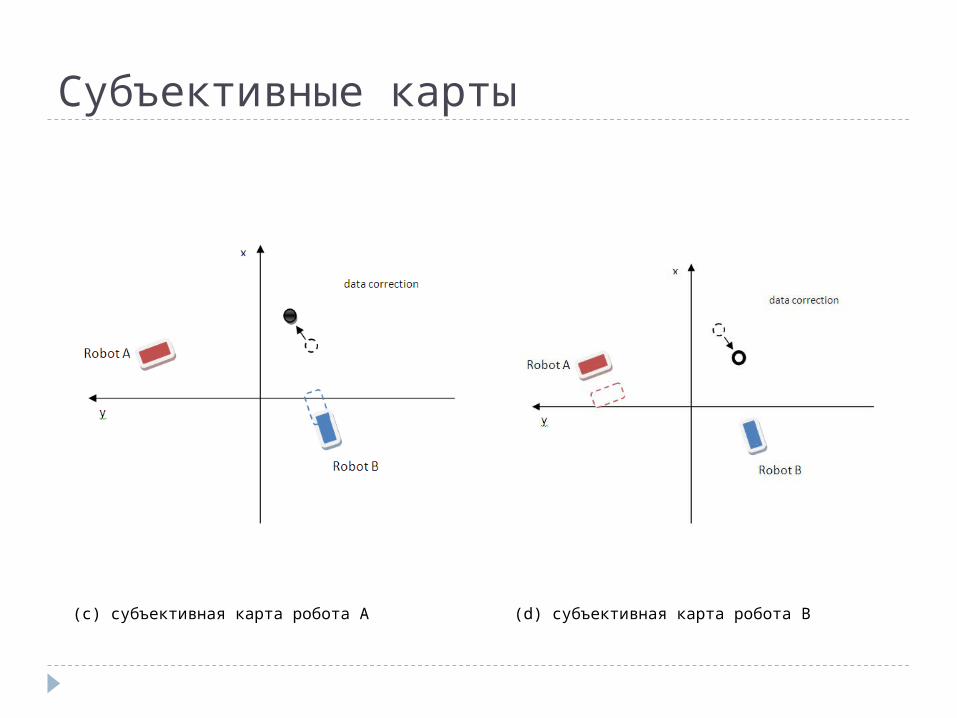
Например, робот А по своим измерениям положения мяча вычисляет координаты робота В через положение робота В относительно мяча
Субъективные карты
(с) субъективная карта робота А (d) субъективная карта робота B
Субъективные карты
При использовании субъективных карт, хоть ошибок локализации избежать и не удается, ошибки одного робота не влияют на вычисления другого
Значит, метод субъективных карт подходит для задач, когда абсолютное положение объектов не важно, а ошибки локализации могут быть значительными
: Поле потенциалов что дано Поле потенциалов каждый робот конструирует сам по
своей субъективной карте и использует его для принятия решений
Робот может совершать 4 действия: двигаться вперед, поворачиваться направо/налево и бить по мячу
Робот выбирает такое действие, которое ориентировано на пик потенциала на поле или на мяч, если он находится на пике
Голова робота поворачивается, чтобы следить за мячом или искать его, если мяч вне поля зрения. Если мяч рядом с роботом, он бьет по мячу в направлении ворот

: Поле потенциалов определение Поле потенциалов V (x; y) робота i состоит из трех
потенциалов: VT - функция от позиции игрока своей команды j, ixTj
VO - функция от положения соперника k, ixOk
VB – функция от положения мяча ixball
Все положения – из субъективной карты Робот использует результаты своих наблюдений для
ixOk и ixball , если видит их. В противном случае, использует данные других игроков своей команды, чтобы нанести на свою карту те объекты, которых он не видит
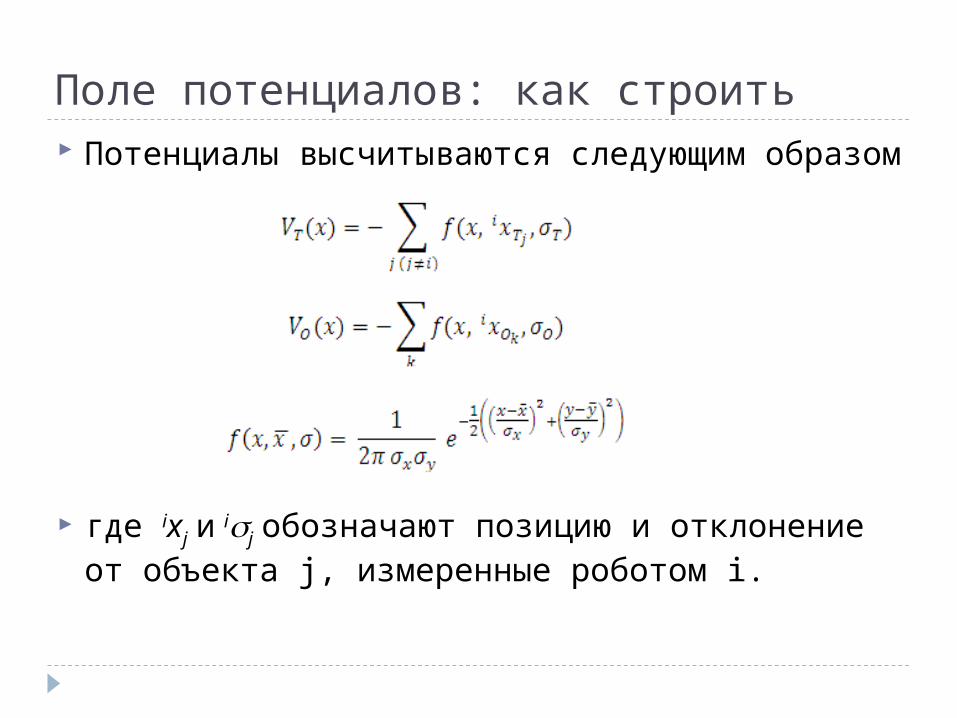
: Поле потенциалов как строить Потенциалы высчитываются следующим образом
где ixj и ij обозначают позицию и отклонение от объекта j, измеренные роботом i.

: Поле потенциалов как строить Потенциал мяча определяется таким образом, чтобы
робот, ближайший к мячу, мог захватить его, а другие роботы заняли позиции, в которых они могут поддержать атаку
Функция потенциала робота i выглядит следующим образом:
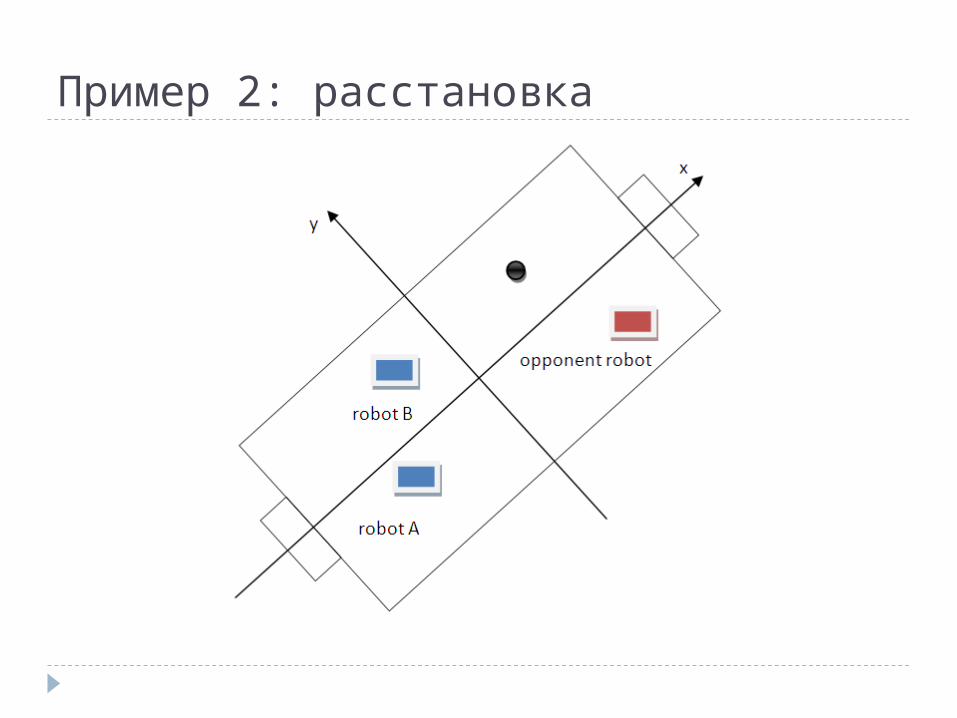
2: Пример расстановка
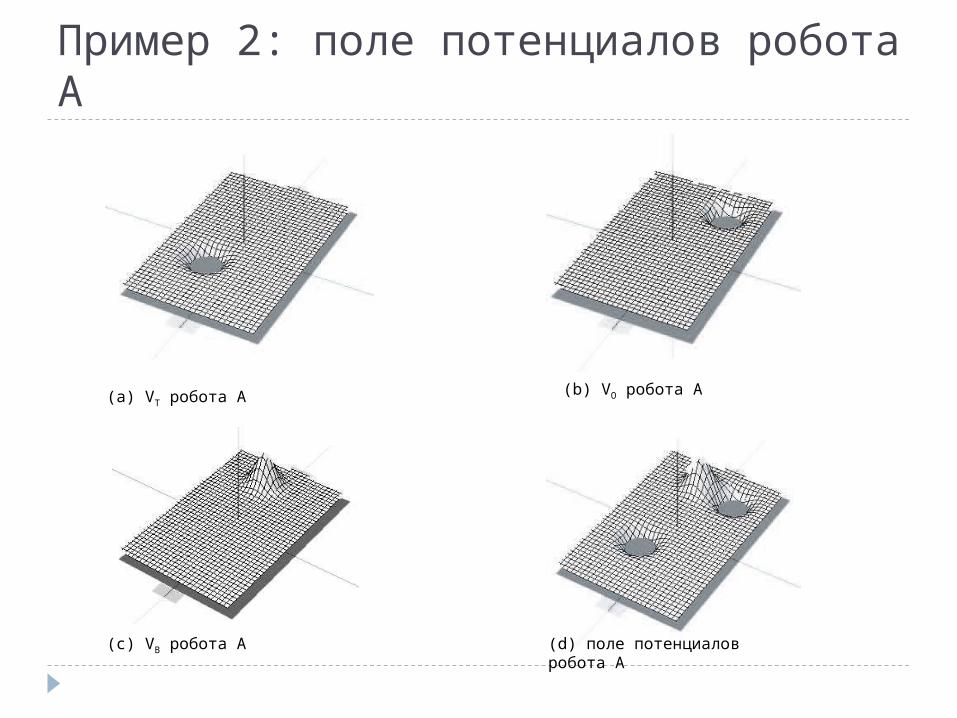
2: Пример поле потенциалов робота А
(a) VT робота А (b) VO робота А
(с) VB робота А (d) поле потенциалов робота А

2: Пример поле потенциалов робота В
(a) VT робота B(b) VO робота B
(с) VB робота B (d) поле потенциалов робота B

: Эксперимент условия Рассматриваем поле и роботов для RoboCup Sony
four-legged robot league 2002
На поле есть 6 меток, двое ворот и один мяч Задача – забить мяч в ворота противника

: Эксперимент условия
Из-за неидеальных условий освещения и низкого разрешения камеры, роботы не могут стабильно распознавать друг друга в своей системе «видения»
Программа локализации (self-localization) основана на Carnegie Melon University's CM-Pack'01 [8].
Чтобы проверить работу метода, на спине каждого робота размещен цветной маркер, и с помощью камеры, расположенной над полем, измеряются положения роботов и мяча
: Эксперимент условия
Используются два робота – А и В, и сравниваются решения робота А при использовании следующих методов: [I] роботы не разделяют информацию [II] робот В отправляет информацию роботу А, и робот А
использует разделяемую карту, построенную по усредненному положению мяча
[III] робот В отправляет информацию роботу А, и робот А использует свою субъективную карту
: Эксперимент критерий оценивания
В качестве критерия оценки эффективности метода берется отношение количества раз, когда решение робота А совпало с тем решением, которое робот А принял, получив данные о своем положении, положении робота В и мяча от внешней камеры (overhead camera (OC)), к числу принятых решений.

: Эксперимент условия Каждое испытание завершалось после двух минут
игры или после первого забитого гола Начальные условия эксперимента: оба робота видят
мяч. Эксперименты проводились с тремя методами в двух
вариантах: робот В определил свое положение с ошибкой, не
выходящей за пределы нормы робот В определил свое положение с серьезной ошибкой
Под ошибкой, не выходящей за пределы нормы, понимается сдвиг на 0-80мм в зависимости от позиции и отклонение в пределах 20 мм

: Эксперимент условия
Под серьезной ошибкой подразумевается, что положение робота В инвертировалось относительно центра поля, и ориентация сдвинулась на 100 градусов.
Ошибка в относительном расстоянии до мяча в обоих случаях зависит от этого расстояния и максимум отклонения составляет 50 мм.
Для каждого начального состояния и каждого из шести условий было проведено 10 испытаний

: Эксперимент условия в картинках
(а) первый вариант расположения роботов и мяча
(b) второй вариант расположения роботов и мяча
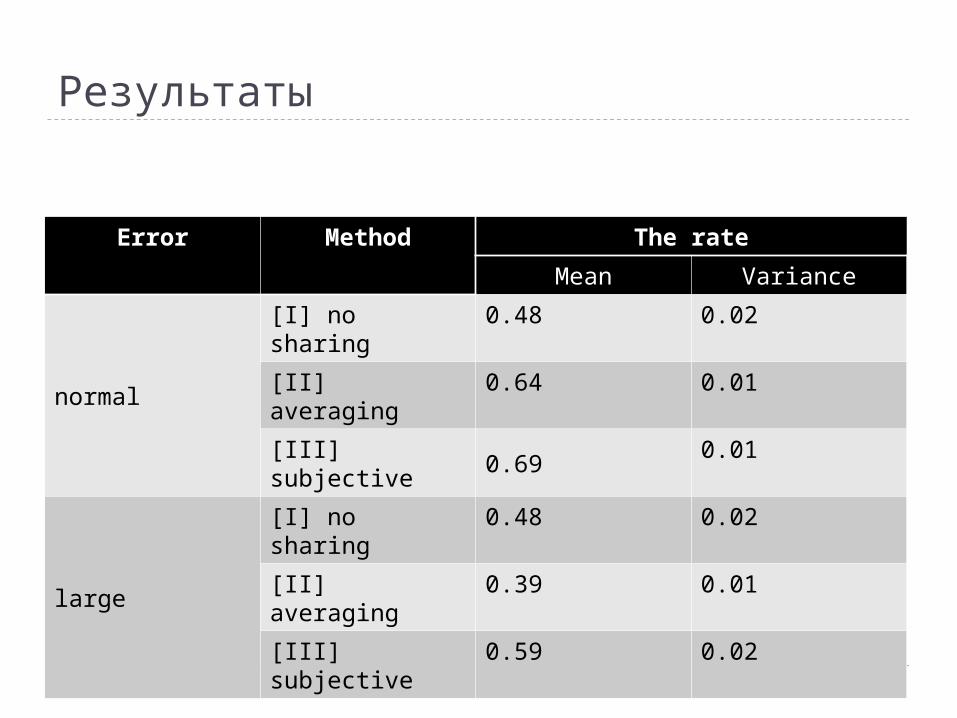
Результаты
Error Method The rate
Mean Variance
normal
[I] no sharing 0.48 0.02
[II] averaging 0.64 0.01
[III] subjective 0.69 0.01
large
[I] no sharing 0.48 0.02
[II] averaging 0.39 0.01
[III] subjective 0.59 0.02

: Результаты подробнее В первом случае, без разделения информации,
роботы столкнулись. С разделением информации при нормальной
величине ошибки, они продемонстрировали более адекватное совместное поведение
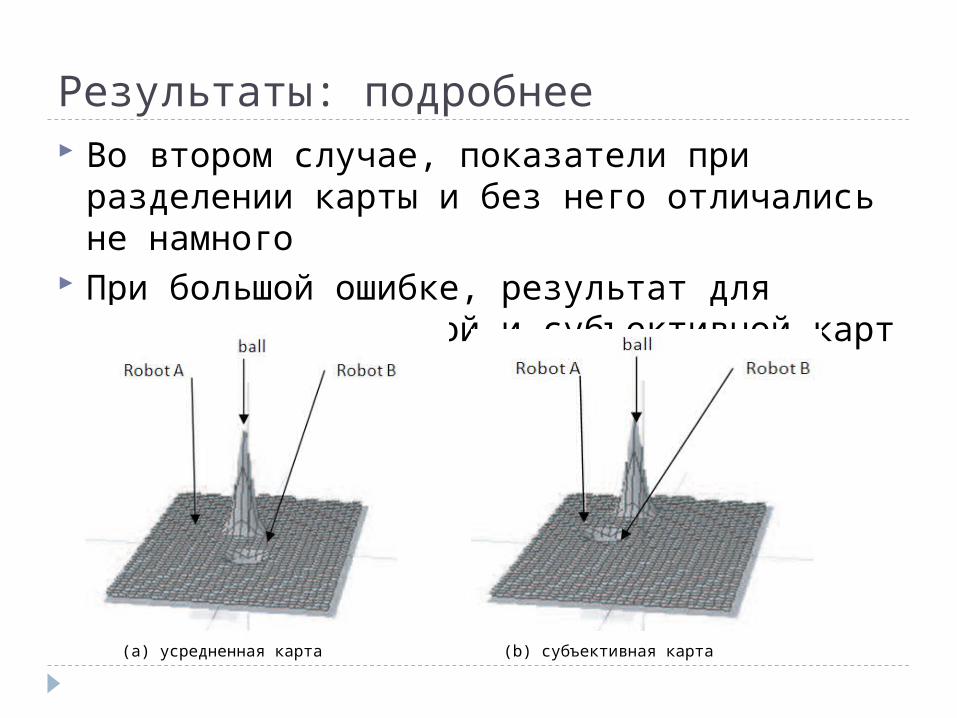
: Результаты подробнее Во втором случае, показатели при разделении карты и
без него отличались не намного При большой ошибке, результат для случаев
усредненной и субъективной карт отличался заметно
(а) усредненная карта (b) субъективная карта

: Результаты подробнее
(а) движение роботов во втором случае при использовании усредненной карты
(а) движение роботов во втором случае при использовании субъективной карты
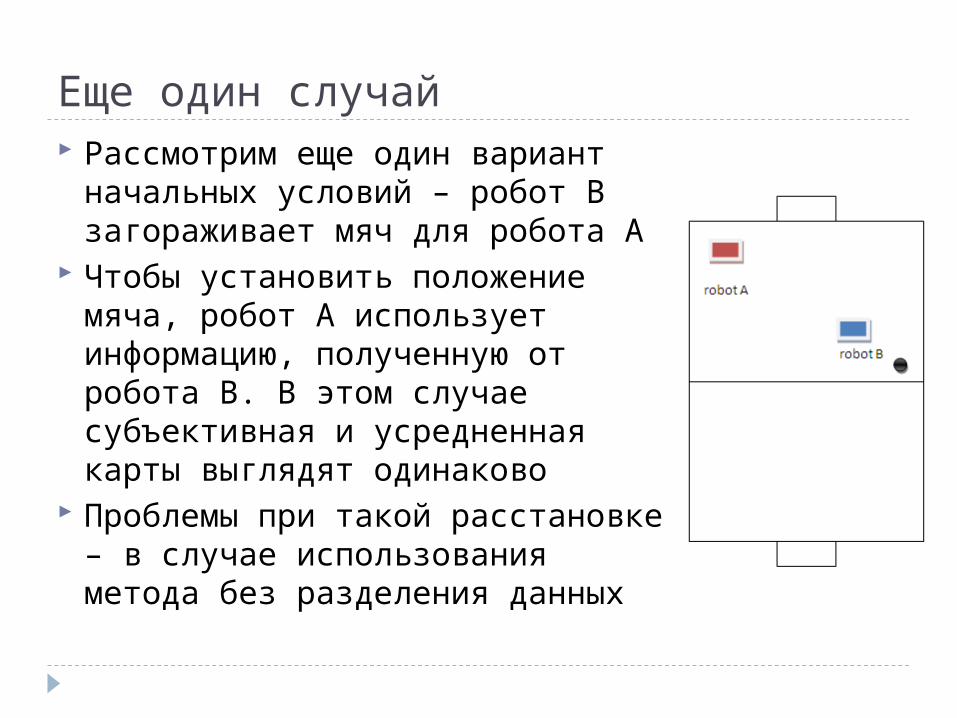
Еще один случай Рассмотрим еще один вариант
начальных условий – робот В загораживает мяч для робота А
Чтобы установить положение мяча, робот А использует информацию, полученную от робота В. В этом случае субъективная и усредненная карты выглядят одинаково
Проблемы при такой расстановке – в случае использования метода без разделения данных
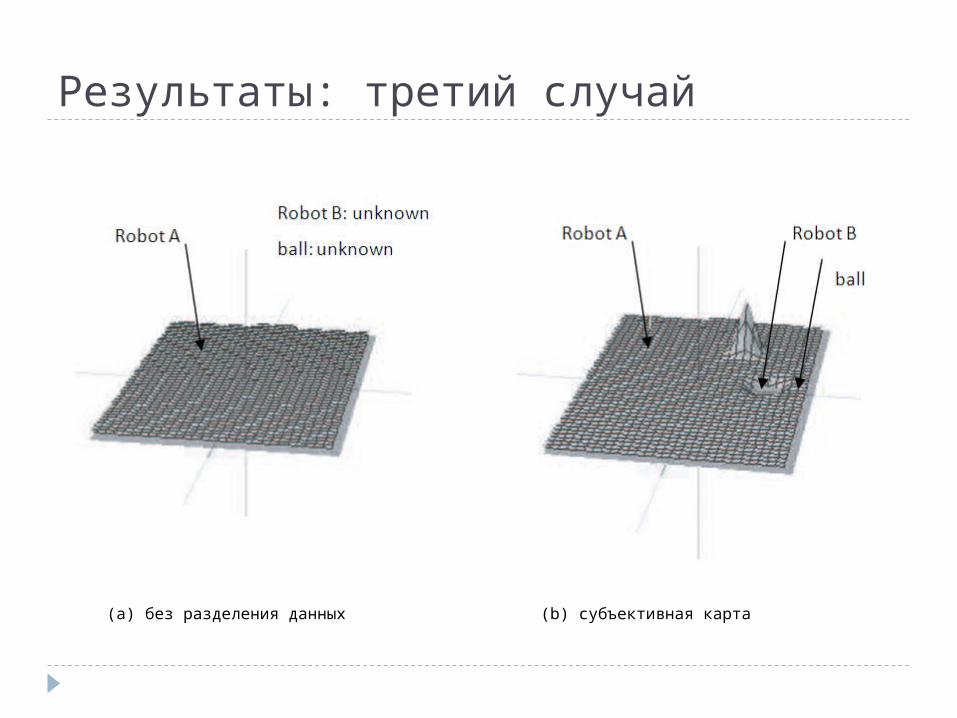
: Результаты третий случай
(а) без разделения данных (b) субъективная карта

: Результаты третий случай
(а) движение роботов в третьем случае при использовании субъективной карты

Итоги Рассмотрели метод субъективных карт для команды
роботов в динамически изменяющейся окружающей среде
Эксперимент показал, что этот метод достаточно эффективен Например, в ситуации серьезной ошибки локализации,
когда метод усредненной разделяемой карты теряет преимущество от использования общих данных, метод субъективных карт работает эффективно
Вообще, если поступающая информация – не лучшего качества, качественный метод позиционирования лучше количественного
Вопросы
?
Ссылки [1] Manuela Veloso, William Uther, Masahiro Fujita, Minoru
Asada, and Hiroaki Kitano. Playing soccer with legged robots. In Proceedings of the 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems, volume 1, pages 437{442, 1998.
[2] Ryo Kurazume and Shigeo Hirose. An experimental study of a cooperative positioning system. Autonomous Robots, 8(1):43{52, 2000.
[3] Yasushi Yagi, Shinichi Izuhara, and Masahiko Yachida. The integration of an environmental map observed by multiple mobile robots with omnidirectional image sensor copis. In Proceedings of the 1996 IEEE/RSJ International Conference on Intelligent Robots and Systems, volume 2, pages 640{647, 1996.
Ссылки
[4] K. Kato, H. Ishiguro, and M. Barth. Identifying and localizing robots in a multi-robot system environment. In Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 966-971, 1999.
[5] T. Nakamura, A. Ebina, M. Imai, T. Ogasawara, and H. Ishiguro. Real-time estimating spatial conguration between multiple robots by triangle and enumeration constraints. In Proceedings of the 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 2048{2054, 2000.
[6] Dieter Fox, Wolfram Burgard, Hannes Kruppa, and Sebastian Thrun. A probablistic approach to collaborative multi-robot localization. Autonomous Robots, 3(8), 2000.
Ссылки
[7] Scott Lenser and Manuela Veloso. Sensor resetting localization for poorly modeled mobile robots. In Proceedings of ICRA-2000, 2000.
[8] William Uther, Scott Lenser, James Bruce, Martin Hock, and Manuela Veloso. CM-Pack'01: Fast legged robot waking, robust localization, and team behaviors. In Andreas Birk, Silvia Coradeschi, and Satoshi Tadokoro, editors, RoboCup 2001: Robot Soccer World Cup V, pages 693{696. Springer, Lecture Note in Articail Intelligence (2377), 2002.














