Embed Size (px)
Citation preview
CHAPTER 2신호와 선형 시스템 분석
정보 전송 시스템에 대한 연구는 본질적으로 시스템을 통해서 신호를 전송하는 것과 관련이 있다.
1장에서 신호는 어떤 양, 주로 전압 또는 전류의 시간에 따른 변화로 정의되었다. 시스템은 어떤
요구된 기능을 수행하기 위해 선택된 소자와 네트워크(부시스템)의 조합이다. 현대 통신 시스템은 매우
복잡하여 요구되는 시스템을 실제로 만들기 전에 시험용 부시스템들로 많은 분석과 실험을 행한다. 그래
서 통신 기술자의 도구는 신호와 시스템을 위한 수학적 모델이다.
이 장에서는 통신 공학에 사용되는 신호와 시스템의 모델링 기법과 분석에 필요한 기술에 대해 설명
한다.1 신호 표현에 대한 시간-주파수의 이원적 관점과 선형, 시불변, 2단자 시스템에 대한 모델이 우선
적인 관점이다. 모델링이란 신호 또는 시스템 자체가 아니라 현 문제에서 핵심되는 중요 특성을 수학적
으로 이상화하여 제시해주는 것임을 항상 명심하는 것이 중요하다.
이러한 간단한 소개와 함께 이제 신호의 분류 및 신호와 시스템을 모델링하는 다양한 방법들에 대해
알아볼 것이다. 이러한 방법들은 복소 지수 푸리에 급수와 푸리에 변환을 이용한 신호의 주파수 영역에
서의 표시 방식과 신호에 대한 그러한 시스템의 효과를 분석하기 위한 선형 시스템 모델과 기술을 포함
한다.
2.1 신호 모델
2.1.1 결정 신호와 랜덤 신호
이 책에서 우리는 결정 신호와 랜덤 신호라는 두 가지 광의의 부류의 신호를 다룬다. 결정 신호
는 완전히 구체화된 시간의 함수로서 표현되는 신호이다. 예를 들어 신호,
(2.1)
1 이 주제에 대한 좀 더 완전한 취급은 선형 시스템 이론에 대한 교재들에서 찾을 수 있다. 이 장에서 추천하는 참고문헌을 참조하라.

20 제2장•신호와 선형 시스템 분석
는 결정 신호로서 친숙한 예로, 여기서 A와 �0는 상수이다. 다른 예로는 P(t)로 표시되는 단위
구형 펄스가 있으며, 다음과 같이 정의된다.
(2.2)
랜덤 신호는 어떤 주어진 시간에 랜덤한 값을 가지는 신호이고, 확률적으로 모델링되어야만
한다. 이들은 6~7장에서 다룰 것이다. 그림 2.1은 방금 논의된 다양한 형태의 신호를 나타낸
것이다.
2.1.2 주기 신호와 비주기 신호
식 (2.1)에 정의된 신호는 주기 신호의 한 예이다. 신호 x(t)는 다음 조건이 만족될 때 주기적이
라고 할 수 있다.
(2.3)
여기서 상수 T0는 주기이다. 식 (2.3)을 만족시키는 가장 작은 수의 T0를 기본 주기라 한다[수식
어 ‘기본(fundamental)’은 종종 생략된다]. 식 (2.3)을 만족하지 않는 신호는 비주기 신호이다.
A cos �0t
A
12T0T0 T0
tt
t
– 12
– 1
1
02
12
T0 ––
(a)
(c)
II(t)
(b)
xR(t)
그림 2.1 다양한 형태의 신호의 예. (a) 결정적(정현파) 신호, (b) 단위 구형 펄스 신호, (c) 랜덤 신호

2.1 신호 모델 21
2.1.3 페이저 신호와 스펙트럼
시스템을 분석할 때 유용한 주기 신호는 다음 신호이다.
(2.4)
이 신호는 세 개의 변수, 즉 진폭 A, 위상 �[단위는 라디안(radian)], 주파수 �0(단위는 초당 라
디안) 또는 f0=�0/2� Hz에 의해 특성이 기술된다. ej�0t가 내재하는 페이저 Aej�와 구분하기
위해서 x̃(t)를 회전 페이저(rotating phasor)라고 한다. 오일러(Euler) 정리2를 사용하여, x̃(t)=
x̃(t+T0)임을 쉽게 보일 수 있으며, 여기서 T0=2�/�0이다. 따라서 x̃(t)는 2�/�0를 주기로 갖
는 주기 신호이다.
회전 페이저 Aej(�0t+�)는 실수 정현파 신호 A cos(�0t+�)와의 관계를 두 가지 방법으로 표시
할 수 있다. 그 첫 번째 방법은 회전 페이저의 실수 부분을 취하는 것이고,
(2.5)
두 번째는 ̃x(t)와 그것의 켤레 복소수를 합하여 1/2을 곱하여 취한 것이다.
(2.6)
그림 2.2는 이러한 두 가지 과정을 그래프로 나타낸 것이다.
2 오일러 이론은 e±ju=cos u±j sin u이고, ej2�=1이다.
그림 2.2 회전 페이저 신호를 정현파 신호에 연관시키는 두 가지 방법. (a) 회전 페이저를 실수축으로 투영, (b) 복소 공액 회전 페이저들의 합
Re
Re
Im
Im12 A
A 12 A
0t +
0t +
0t +
A cos ( 0t + )
A cos ( 0t + )
(b)(a)
ω θ
ω θ
ω
ω
ω θ
θ
θ
22 제2장•신호와 선형 시스템 분석
식 (2.5)와 식 (2.6)은 회전 페이저 ̃x(t)=A exp[ j(�0t/2+�)]를 이용하여 정현파 신호 x(t)=A
cos(�0t+�)를 다르게 표현한 x(t)에 대한 시간 영역 표현들이다. 주파수 영역에서 x(t)의 두 가
지 등가 표현식은 변수 A와 �가 특정 f0에 대해서 주어질 때 회전 페이저 신호가 완전히 기술되
는 것에 주목함으로써 얻을 수 있다. 따라서 Aej�의 주파수에 대한 크기와 각의 그래프는 x(t)
의 특성을 완전히 나타내기에 충분한 정보를 준다. 단일 정현파 신호의 경우 ̃x(t)는 단일 주파
수 f0에 대해서만 존재하기 때문에, 결과 그래프는 한 개의 이산 직선으로 이루어지며 이것을
선 스펙트럼(line spectra)이라고 한다. 그림 2.3(a)에 보이는 것과 같이 이러한 그래프를 x(t)의
진폭 선 스펙트럼과 위상 선 스펙트럼이라고 한다. 이것들은 식 (2.5)에 의해서 x̃(t)뿐만 아니라
x(t)의 주파수 영역 표현이 된다. 그림 2.3(a)는 단지 양의 주파수에서만 존재하기 때문에 x(t)의
단측파대 진폭 스펙트럼과 위상 스펙트럼이라 한다. 다른 주파수의 정현파 합으로 이루어진 신호
에서 단측파대 스펙트럼은 여러 개의 선, 즉 각 정현파 요소들에 해당하는 직선들의 합으로 이
루어진다.
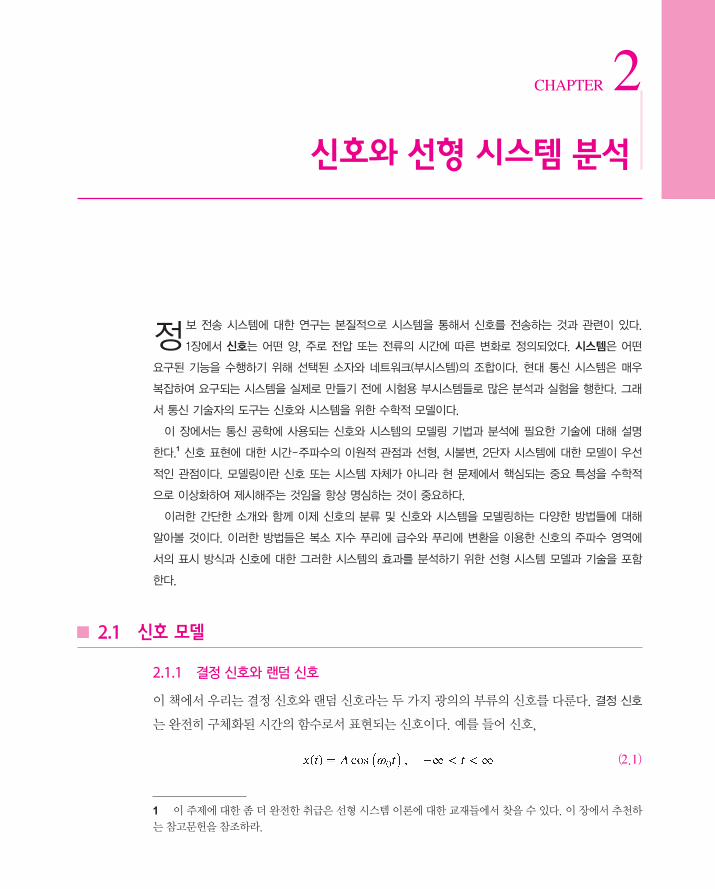
식 (2.6)의 켤레 복소 위상들의 진폭과 위상을 주파수에 대해 그리면 양측파대 진폭 스펙트럼
과 위상 스펙트럼이라고 하는 x(t)에 대한 또 다른 주파수 영역 표현을 얻으며 그림 2.3(b)와 같
다. 그림 2.3(b)에서 두 가지 중요한 사실을 관찰할 수 있다. 첫째는 실제 신호 A cos(�0t+�)를
구하기 위해서 켤레 복소 페이저 신호를 더할 필요가 있기 때문에, 주파수 영역에서는 정확하
게 음의 주파수 f=-f0에서 선이 존재하게 된다는 것이다. 둘째는 진폭 스펙트럼은 우대칭이
고 위상 스펙트럼은 f=0에 기대칭임을 알 수 있다. 이런 대칭성은 x(t)가 실수 신호이기 때문
이다. 단측파대의 경우처럼 여러 개의 정현파 합으로 이루어진 신호의 양측파대 스펙트럼은
여러 개의 선으로 구성되어 있으며, 한 쌍의 선 스펙트럼은 각 정현파의 스펙트럼 성분이다.
그러므로 그림 2.3(a)와 (b)는 주파수 f=f0(그리고 f=-f0)에서 선으로 이루어지는 A
cos(�0t+�) 신호에 대한 등가적인 스펙트럼 표현들이다. 이런 간단한 경우에는 스펙트럼 표
현 방식을 사용하는 것이 오히려 불필요하게 복잡해 보이지만, 신호가 복잡한 경우에는 푸리
에 급수와 푸리에 변환을 이용해서 신호의 스펙트럼을 구할 수 있음을 곧 알게 될 것이다.
AmplitudeAmplitude PhasePhase
A
ff00
ff0 –f0
–f0f0
ff00
θ
0
θ
0
12A
(b)(a)
–θ
그림 2.3 A cos(�0t+�) 신호의 진폭 스펙트럼과 위상 스펙트럼. (a) 단측파대, (b) 양측파대
2.1 신호 모델 23
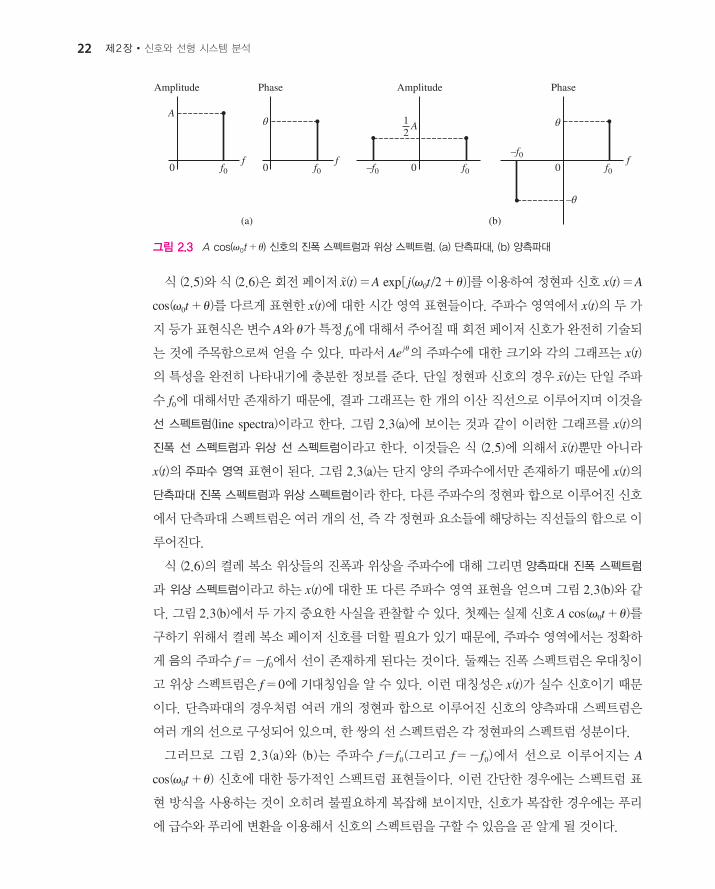
예제 2.1
(a) 다음 신호의 단측파대 스펙트럼과 양측파대 스펙트럼을 그리기 위하여
(2.7)
x(t)를 다음과 같이 쓸 수 있다.
(2.8)
따라서 단측파대 스펙트럼과 양측파대 스펙트럼은 그림 2.3과 같이 A=2, �=-23� rad, f0=5Hz이다.
(b) 만약 하나 이상의 정현파 성분이 한 신호에 존재한다면, 그것의 스펙트럼은 다수의 선들로 이루어
진다. 예를 들어, 다음 신호는
(2.9)
다음과 같이 쓰여질 수 있다.
(2.10)
위 신호의 단측파대 진폭 스펙트럼은 f=5Hz에서 진폭이 2인 선과 f=10Hz에서 진폭이 1인 선으로 이
루어진다. 위 신호의 단측파대 위상 스펙트럼은 f=5Hz에서 -2�/3라디안 크기를 갖는 선으로 이루어
진다. 양측파대 진폭 스펙트럼을 얻기 위해서는 간단히 단측파대 진폭 스펙트럼 선들의 진폭을 반으로
줄이고, 이 결과를 f=0에 대칭인 상을 구하여 얻는다( f=0에 있는 진폭 직선들은 그대로 남는다). 양
측파대 위상 스펙트럼은 단측파대 위상 스펙트럼을 f=0을 주위로 해서 대칭인 상을 구하고 왼쪽(음의
주파수 부분)을 역으로 취하여 얻는다.
2.1.4 특이 함수
비주기 함수의 한 가지 중요한 하위 부류는 특이 함수이다. 이 책에서는 단지 두 가지 특이 함
수, 즉 단위 임펄스 함수 (t)(혹은 델타 함수)와 단위 계단 함수 u(t)에 대해서만 설명한다. 단위 임
펄스 함수는 다음 적분식으로 정의된다.
(2.11)
24 제2장•신호와 선형 시스템 분석
여기서 x(t)는 t=0에서 연속적인 임의의 시험 함수이다. 변수를 치환하고, x(t)를 새로이 정의
하면 다음의 택출성(sifting property)을 얻는다.
(2.12)
여기서 x(t)는 t=t0에서 연속이다. 시스템 분석에 대해 공부할 때 택출성을 자주 사용하게 될
것이다. 특별한 경우로서, t1≤t≤t2일 때 x(t)=1이고 t<t1이고 t>t2일 때 x(t)=0인 경우를
고려함으로써 다음의 두 가지 성질
(2.13)
그리고
(2.14)
를 얻게 되는데, 이것으로 단위 임펄스를 달리 정의할 수 있다. 식 (2.14)에 의해서 식 (2.12)의
피적분 함수는 x(t0) (t-t0)로 대치될 수 있으며, 식 (2.13)에 의해서 택출성이 증명된다.
식 (2.11)의 정의로부터 증명될 수 있는 단위 임펄스 함수의 다른 성질들은 다음과 같다.
1. (at)= 2|a| (t), a는 상수
2. (-t)= (t)
3. x(t) (t-t0)dt=
x(t0), t1<t0<t2
0, otherwise (택출성의 일반화)
t0=t1, t2에서는 정의 안 됨
4. x(t) (t-t0)=x(t0) (t-t0), 여기서 x(t)는 t=t0에서 연속이다.
5. x(t) (n)(t-t0)dt=(-1)nx(n)(t0), t1<t0<t2. [이 식에서 위 첨자 (n)은 n차 미분을 나타내고,
x(t)와 그것의 첫 번째 n번 미분은 t=t0에서 연속이라고 가정한다.]
6. f(t)=a0 (t)+a1(1)(t)+ … +an
(n)(t)이고, g(t)=b0 (t)+b1(1)(t)+ … +bn
(n)(t)일 때, f(t)=
g(t)라면 이것은 a0=b0, a1=b1, …, an=bn임을 의미한다.
식 (2.13)과 식 (2.14)는 무한히 작은 폭으로 단위 면적을 가지는 적절히 선택된 일반적인 함
수의 극한으로 단위 임펄스 함수를 직관적으로 생각한 것이다. 예를 들어 =1/4와 =1/2인
경우에 대하여 그림 2.4(a)에서 보여주고 있는 신호는 다음과 같다.
(2.15)

2.1 신호 모델 25
어떤 변수가 0으로 접근함에 따라 단위 면적을 가지고 극한에서 0의 펄스폭을 갖는 임의의 신
호, 예를 들어 그림 2.4(b)에 나타낸 다음의 신호는 (t)를 적절히 표현할 수 있는 함수이다.
(2.16)
다른 특이 함수들은 단위 임펄스 함수를 적분하거나 미분함으로써 정의될 수 있다. 우리는
단위 임펄스의 적분으로 정의되는 단위 계단 함수 u(t)만 필요하다. 따라서 다음과 같다.
(2.17)
또는
(2.18)
(단위 펄스 함수의 정의와의 일관성을 유지하기 위하여 우리는 u(0)=1로 정의한다.) (-∞,∞)
구간에서 존재하는 신호를 어떤 시점에서 켜는 과정을 표현하거나 계단 형태의 신호를 표현
하는 데 단위 계단 함수는 매우 유용하다. 예를 들어, 식 (2.2)의 단위 구형 펄스 함수는 다음과
같이 단위 계단 함수들로 쓸 수 있다.
(2.19)
11
22
12
14
14
12
–1 00
(b)
– 212
ε → 0ε → 0
ε =
12
ε =
14
ε =
ε = 1
tt–1
2–
(a)
그림 2.4 이 0으로 접근함에 따라 극한에서 단위 임펄스 함수를 표현하는 두 가지 방법. (a) ( 12 )P(t/2 ), (b) [(1/�t) sin(�t/ )]2
26 제2장•신호와 선형 시스템 분석
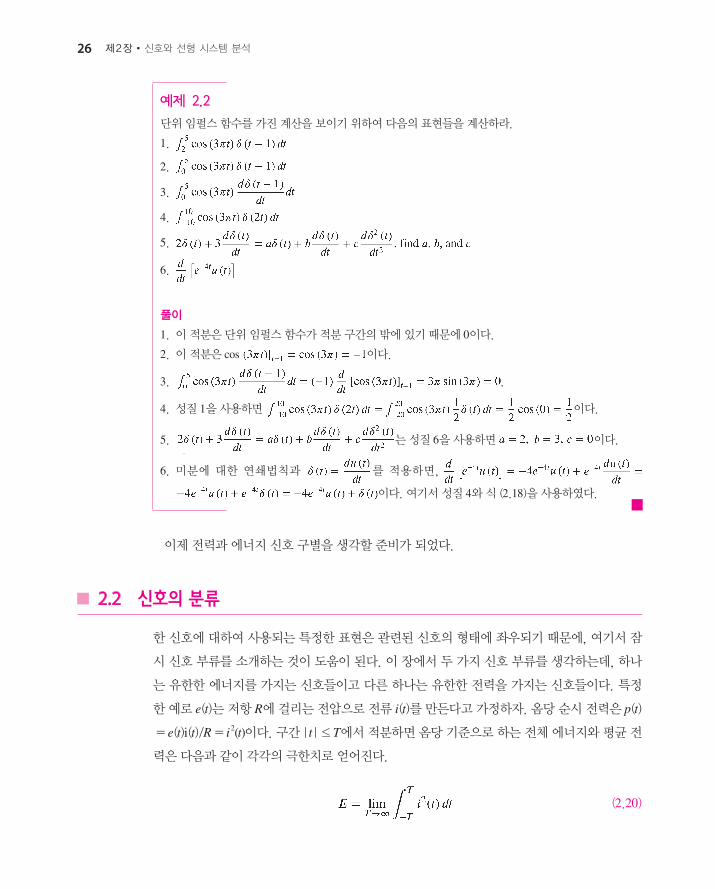
예제 2.2
단위 임펄스 함수를 가진 계산을 보이기 위하여 다음의 표현들을 계산하라.
1.
2.
3.
4.
5.
6.
풀이
1. 이 적분은 단위 임펄스 함수가 적분 구간의 밖에 있기 때문에 0이다.
2. 이 적분은 cos 이다.
3. .
4. 성질 1을 사용하면 이다.
5. 는 성질 6을 사용하면 이다.
6. 미분에 대한 연쇄법칙과 를 적용하면,
이다. 여기서 성질 4와 식 (2.18)을 사용하였다.
이제 전력과 에너지 신호 구별을 생각할 준비가 되었다.
2.2 신호의 분류
한 신호에 대하여 사용되는 특정한 표현은 관련된 신호의 형태에 좌우되기 때문에, 여기서 잠
시 신호 부류를 소개하는 것이 도움이 된다. 이 장에서 두 가지 신호 부류를 생각하는데, 하나
는 유한한 에너지를 가지는 신호들이고 다른 하나는 유한한 전력을 가지는 신호들이다. 특정
한 예로 e(t)는 저항 R에 걸리는 전압으로 전류 i(t)를 만든다고 가정하자. 옴당 순시 전력은 p(t)
=e(t)i(t)/R=i2(t)이다. 구간 |t|≤T에서 적분하면 옴당 기준으로 하는 전체 에너지와 평균 전
력은 다음과 같이 각각의 극한치로 얻어진다.
(2.20)

2.2 신호의 분류 27
그리고
(2.21)
일반적으로 복소수가 될 수 있는 임의의 신호 x(t)의 전체 (정규화된) 에너지는
(2.22)
이고, (정규화된) 전력은 다음과 같다.
(2.23)
식 (2.22)와 식 (2.23)의 정의들을 기반으로 해서 두 가지 다른 부류의 신호를 정의할 수 있다.
1. 만약 0<E<∞이면 P=0이고, 우리는 x(t)를 에너지 신호라고 한다.
2. 만약 0<P<∞이면 E=∞이고, 우리는 x(t)를 전력 신호라고 한다.3
예제 2.3
신호 부류를 결정하는 예로 다음 신호를 생각하자.
(2.24)
여기서 A와 �는 양의 상수이다. 식 (2.22)를 사용하면 E는 유한한 값으로 A2/2�이기 때문에 x1(t)가 에
너지 신호임을 쉽게 증명할 수 있다. � → 0으로 놓으면 우리는 신호 x2(t)=Au(t)를 얻을 수 있고 이것은
무한 에너지를 가진다. 식 (2.23)을 적용하면 Au(t)에 대하여 P=12 A2이 되므로 x2(t)가 전력 신호임을 증
명할 수 있다.
예제 2.4
식 (2.4)에 의해 주어진 회전 페이저 신호를 생각하자. ̃x(t)의 전력 P가 식 (2.25)와 같이 유한한 값을 가
지므로 전력 신호임을 증명할 수 있다.
(2.25)
3 에너지 신호도, 전력 신호도 아닌 신호를 쉽게 발견할 수 있다. 예를 들면, x(t)=t-1/4, t≥t0>0, 그 외에서는 0인 신호이다.
28 제2장•신호와 선형 시스템 분석
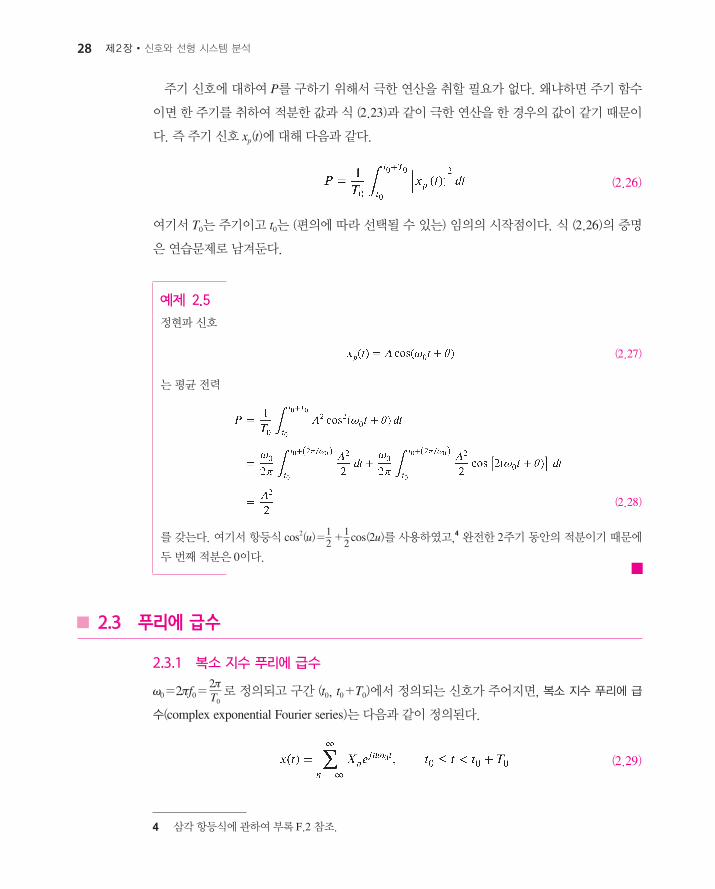
주기 신호에 대하여 P를 구하기 위해서 극한 연산을 취할 필요가 없다. 왜냐하면 주기 함수
이면 한 주기를 취하여 적분한 값과 식 (2.23)과 같이 극한 연산을 한 경우의 값이 같기 때문이
다. 즉 주기 신호 xp(t)에 대해 다음과 같다.
(2.26)
여기서 T0는 주기이고 t0는 (편의에 따라 선택될 수 있는) 임의의 시작점이다. 식 (2.26)의 증명
은 연습문제로 남겨둔다.
예제 2.5
정현파 신호
(2.27)
는 평균 전력
(2.28)
를 갖는다. 여기서 항등식 cos2(u)=12+1
2 cos(2u)를 사용하였고,4 완전한 2주기 동안의 적분이기 때문에
두 번째 적분은 0이다.
2.3 푸리에 급수
2.3.1 복소 지수 푸리에 급수
�0=2� f0= 로 정의되고 구간 (t0, t0+T0)에서 정의되는 신호가 주어지면, 복소 지수 푸리에 급
수(complex exponential Fourier series)는 다음과 같이 정의된다.
(2.29)
4 삼각 항등식에 관하여 부록 F.2 참조.
2�T0
2.3 푸리에 급수 29
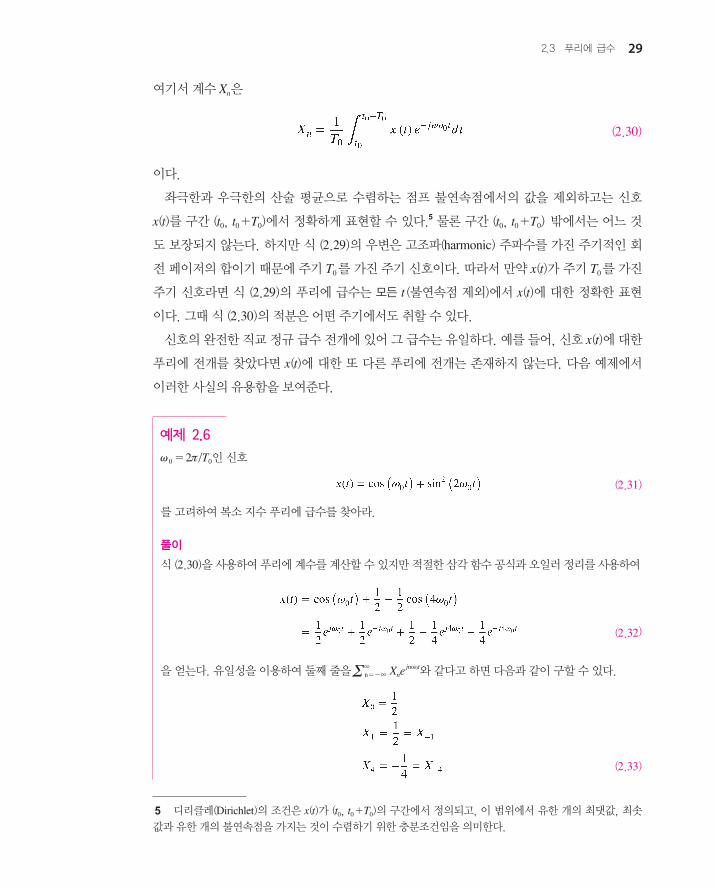
여기서 계수 Xn은
(2.30)
이다.
좌극한과 우극한의 산술 평균으로 수렴하는 점프 불연속점에서의 값을 제외하고는 신호
x(t)를 구간 (t0, t0+T0)에서 정확하게 표현할 수 있다.5 물론 구간 (t0, t0+T0)̀ 밖에서는 어느 것
도 보장되지 않는다. 하지만 식 (2.29)의 우변은 고조파(harmonic) 주파수를 가진 주기적인 회
전 페이저의 합이기 때문에 주기 T0`를 가진 주기 신호이다. 따라서 만약 x(t)가 주기 T0`를 가진
주기 신호라면 식 (2.29)의 푸리에 급수는 모든 t (̀불연속점 제외)에서 x(t)에 대한 정확한 표현
이다. 그때 식 (2.30)의 적분은 어떤 주기에서도 취할 수 있다.
신호의 완전한 직교 정규 급수 전개에 있어 그 급수는 유일하다. 예를 들어, 신호 x(t)에 대한
푸리에 전개를 찾았다면 x(t)에 대한 또 다른 푸리에 전개는 존재하지 않는다. 다음 예제에서
이러한 사실의 유용함을 보여준다.
예제 2.6
� 0=2�/T0인 신호
(2.31)
를 고려하여 복소 지수 푸리에 급수를 찾아라.
풀이
식 (2.30)을 사용하여 푸리에 계수를 계산할 수 있지만 적절한 삼각 함수 공식과 오일러 정리를 사용하여
(2.32)
을 얻는다. 유일성을 이용하여 둘째 줄을 �∞n=-∞ Xne
jn�0t와 같다고 하면 다음과 같이 구할 수 있다.
(2.33)
5 디리클레(Dirichlet)의 조건은 x(t)가 (t0, t0+T0)의 구간에서 정의되고, 이 범위에서 유한 개의 최댓값, 최솟값과 유한 개의 불연속점을 가지는 것이 수렴하기 위한 충분조건임을 의미한다.

30 제2장•신호와 선형 시스템 분석
그 외 다른 모든 Xn은 0이다. 따라서 신호의 푸리에 급수가 유일하다는 사실을 참고하면 많은 노력이
절약될 수 있다.
2.3.2 푸리에 계수의 대칭 성질
x(t)를 실수라고 가정하면 식 (2.30)에서 적분기호 안쪽에 켤레 복소수를 취하고 n을 -n으로
대체하여 다음을 얻을 수 있다.
(2.34)
Xn을 다음과 같이 쓰면
(2.35)
다음 식을 얻는다.
(2.36)
따라서 실수 신호의 푸리에 계수의 크기는 n에 대해서 우함수이고 각은 기함수이다.
x(t)의 대칭성에 따라 푸리에 계수의 몇 개의 대칭 성질을 유도할 수 있다. 예를 들어, x(t)가
우함수, 즉 x(t)=x(-t)라고 가정하면 오일러 정리를 이용하여 푸리에 계수는 다음과 같이 표
현된다(t0=-T0/2로 선택한다).
(2.37)
x(t) sin(n�0t)가 기함수이므로 두 번째 항은 0이 된다. 그러므로 Xn은 실수가 되고, 게다가
cos(n�0t)가 n에 대해서 우함수이기 때문에 Xn은 n의 우함수가 된다. x(t)가 우함수가 되는 결과
는 예제 2.6에 예시되었다.
반면 x(t)=-x(-t)[즉 x(t)는 기함수]라면 x(t) cos(n�0t)가 기함수가 되고 Xn를 표현한 식
(2.37)에서 첫 번째 항이 0이 되므로 Xn이 순허수가 됨을 쉽게 알 수 있다. 게다가 sin(n�0t)가 n
의 기함수이기 때문에 Xn은 n의 기함수가 된다.
또다른 형태의 대칭성은 (기함수)반파 대칭[(odd) halfwave symmetry]으로 다음과 같이 정의
된다.
(2.38)

2.3 푸리에 급수 31
여기서 T0는 x(t)의 주기이다. 기함수 반파 대칭성을 가지는 신호에 대해서
(2.39)
이고, 이것은 푸리에 급수가 단지 n이 홀수인 항만을 갖는다는 것을 나타낸다. 이것의 증명은
연습문제로 남겨둔다.
2.3.3 푸리에 급수의 삼각 함수 형태
식 (2.36)을 사용하고 x(t)가 실수라고 가정하면 다음 형태의 쌍으로 복소 지수 푸리에 급수를
다시 묶을 수 있다.
(2.40)
여기서 식 (2.36)이 사용되었다. 그러므로 식 (2.29)는 다음의 등가적인 삼각 함수 형태로 쓸
수 있다.
(2.41)
식 (2.41)에서 코사인 항을 전개하면 다음 형태의 또 다른 등가적인 급수를 얻는다.
(2.42)
여기에서
(2.43)
이고, Bn은 다음과 같다.
(2.44)
푸리에 급수에서 삼각 함수 형태에서든 지수 형태에서든 X0는 x(t)의 평균 또는 직류 성분을

32 제2장•신호와 선형 시스템 분석
나타낸다. n=1에서의 항을 기본파(fundamental)라 부르고 n=2에서의 항을 제2고조파(second
harmonic)라 부른다.
2.3.4 파시발의 정리
주기 신호의 평균 전력을 나타내는 식 (2.26)에6 x(t)대신에 식 (2.29)를 대입하고 적분과 합의
순서를 바꾸면
(2.45)
혹은
(2.46)
을 얻게 되는데, 이것을 파시발의 정리(Parseval’s theorem)라 한다. 말하자면 식 (2.45)는 주기
신호 x(t)의 평균 전력은 그 신호의 푸리에 급수의 각 페이저 성분 전력의 합인 것을 나타내고,
식 (2.46)은 그것의 평균 전력은 DC 성분의 전력과 AC 성분의 전력의 합인 것을 나타낸다[식
(2.41)로부터 각 코사인 성분의 전력은 그것의 진폭 제곱을 2로 나눈 값, 즉 (2|Xn|)2/2=2|Xn|
2
이다]. 푸리에 성분들의 전력은 그들이 서로 직교성을 갖기 때문에 더해질 수 있다(즉 두 고조
파의 곱의 적분은 0이다).
2.3.5 푸리에 급수의 예
표 2.1은 흔히 발생하는 여러 가지 주기적 파형에 대한 푸리에 급수를 구한 것이다. 왼쪽 열은
한 주기에 대한 신호를 나타낸 것이다. 주기성의 정의는 모든 t에 대해서 신호가 다음과 같아
야 한다.
x(t)=x(t+T0)
표 2.1의 오른쪽 열에 있는 푸리에 계수들의 유도는 연습문제로 남겨둔다. 전파 정류된 정현
파는 실제로는 12 T0의 주기를 갖는다.
주기적인 펄스 열은 계수들이 다음과 같이 정의되는 싱크 함수(sinc function)로 표현하는 것
이 편리하다.
6 �T0 ( ) dt는 임의의 주기에 대한 적분을 의미한다.

2.3 푸리에 급수 33
(2.47)
싱크 함수는 독립변수의 정숫값에서 0을 지나고 그 진폭이 감쇄하여 진동하는 우함수이다.
표 2.1 여러 가지 주기 신호에 대한 푸리에 급수
Signal(one period) Coefficients for exponential Fourier series
예제 2.7
진폭이 0과 A이고 우대칭인 구형파의 복소 지수 푸리에 급수와 삼각 함수 푸리에 급수에 대한 표 2.1의
펄스 열(항목 1)을 위한 결과를 풀어라 .
풀이
표 2.1의 항목 1에서 t0=0, �=12 T0로 놓고 푼다. 그러면
(2.48)
인데

34 제2장•신호와 선형 시스템 분석
이므로 x(t)는 다음과 같다,
(2.49)
첫 번째 식은 푸리에 급수의 복소 지수 형태이고 두 번째 식은 삼각 함수 형태이다. 이 구형파의 직류
성분은 X0=12 A이다. 푸리에 급수를 구하는 과정에서 이 항을 0으로 두면 진폭 ±1
2 A인 구형파의 푸리
에 급수를 얻는다. 이런 구형파는 반파 대칭 성질을 가지며, 이것이 푸리에 급수에 짝수 고조파가 전혀
없는 이유이다.
2.3.6 선 스펙트럼
신호의 복소 지수 푸리에 급수인 식 (2.29)는 단순한 페이저들의 합이다. 2.1절에서는 페이저
를 두 개의 그래프, 즉 하나는 주파수 대 진폭 특성을, 또 다른 하나는 주파수 대 위상을 나타
내는 그림으로 주파수 영역에서의 특성을 나타낼 수 있음을 설명하였다. 같은 방법으로 주기
신호도 두 개의 그래프, 즉 주파수에 대해 각 페이저 성분의 진폭을 나타내는 그래프와 다른
하나는 주파수에 대해 각 페이저 성분의 위상을 나타내는 그래프를 그림으로서 주파수 영역
에서 특성을 보일 수 있다. 결과적인 그래프를 각각 신호에 대한 양측파대 진폭 스펙트럼7과 위
상 스펙트럼이라고 한다. 식 (2.36)으로부터 실수 신호에서 진폭 스펙트럼은 우대칭이고 위상
스펙트럼은 기대칭이며, 이것은 실수 정현파 신호를 얻기 위하여 켤레 복소 페이저를 합하게
되는 단순한 결과 때문이다.
그림 2.5(a)는 표 2.1에서 주어진 결과를 그린 반파 정류된 정현파의 양측 스펙트럼(double-
sided spectrum)이다. n=2, 4,…에 대해서 Xn은 다음과 같이 표현된다.
(2.50)
7 비록 진폭 스펙트럼(amplitude spectrum)이 관습적인 용어지만 크기 스펙트럼(magnitude spectrum)이 더 정확한 용어이다.
짝수

2.3 푸리에 급수 35
n=-2,-4,…일 때
(2.51)
이다. 당연히 그래야만 하는 것처럼 위상은 기대칭임을 확실히 알 수 있다(e±j�=-1). 따라서
이것을 X±1=∓jA/4 와 함께 적용하면 다음과 같다.
그림 2.5 반파 정류된 사인 파형의 선 스펙트럼들. (a) 양측, (b) 단측

36 제2장•신호와 선형 시스템 분석
(2.52)
(2.53)
단측 선 스펙트럼(single-sided line spectra)은 식 (2.41)의 삼각 함수 푸리에 급수에 있는 항
들에서 진폭과 위상각을 nf 0에 대해서 그리면 얻을 수 있다. 급수식 (2.41)은 단지 음이 아닌
주파수 항만을 가지고 있기 때문에 단측 스펙트럼은 단지 n f 0≥0에서만 존재한다. 주기 신
호의 단측 위상 스펙트럼은 nf 0≥0일 때 양측 위상 스펙트럼과 동일하고, nf 0<0에서는 0이
라는 것을 식 (2.41)로부터 쉽게 알 수 있다. 단측 진폭 스펙트럼은 nf 0>0 영역에서 양측 진
폭 스펙트럼의 모든 선의 진폭을 2배한 것이다. n f 0=0에서의 선은 같은 값을 갖는다. 그림
2.5(b)는 반파 정류된 사인파의 단측 스펙트럼이다.
두 번째 예로, 다음의 펄스 열
(2.54)
를 생각해본다. 표 2.1의 항목 1에서 t0=12 �로 하면 푸리에 계수는 다음과 같다.
(2.55)
푸리에 계수는 |Xn| exp( j/Xn ) 형태로 쓸 수 있고 여기서
(2.56)
이고
(2.57)
이다. 식 (2.57)의 우변에 있는 두 번째와 세 번째 줄의 ±�는 sinc(nf0�)<0̀일 때마다 |sinc
n은 모두 짝수

2.3 푸리에 급수 37
(nf0� )̀|=-sinc(nf0�)임을 고려한 것이다. x(t)가 실수이면 위상 스펙트럼은 기대칭이어야 하므
로 �를 nf0<0̀일 때는 빼주고, nf0>0̀일 때는 더해준다. 반대로 할 수도 있으며 임의적으로 선
택해도 무관하다. 이러한 것들을 고려하여 이제 양측 진폭 스펙트럼과 위상 스펙트럼을 그릴
수 있다. 그림 2.6은 여러 가지 �와 T0값에 대해서 그린 것이다. 위상 스펙트럼의 각 선들에서
2�의 적절한 곱만큼 빼준다(e±j2�=1).
그림 2.6(a)와 (b)를 비교하면 진폭 스펙트럼 포락선의 0은 1/� Hz의 배수가 되는 점에서 발
생되는데, 이들은 펄스폭이 감소할수록 주파수축을 따라 바깥쪽으로 이동한다. 즉 신호의 시
간 간격과 스펙트럼 폭은 반비례 관계이며, 나중에 이러한 성질이 성립됨을 일반적으로 증명할
것이다. 둘째로 그림 2.6(a)와 (c)를 비교하면 선 스펙트럼 간의 간격은 1/T0이다. 따라서 x(t)의
주기가 증가함에 따라서 주파수에 대한 스펙트럼 선의 밀도도 증가한다.
그림 2.6 주기적인 펄스 열 신호에 대한 스펙트럼. (a) �=14T0, (b) �=18T0. T0는 (a)에 있는 것과 같음,
(c) �=18T0. �는 (a)에 있는 것과 같음

38 제2장•신호와 선형 시스템 분석
컴퓨터 예제 2.1
다음에 주어진 MATLABTM 프로그램은 반파 정류된 정현파의 진폭과 위상 스렉트럼을 계산하고 있다.
stem을 사용하여 그려진 그림은 그림 2.5(a)와 똑같은 모습을 보이고 있다. 다른 파형의 스펙트럼을 그
리는 프로그램은 컴퓨터 실습문제로 남겨둔다.
2.4 푸리에 변환
푸리에 급수 표현식 (2.29)를 비주기 신호에 대해서도 유효하도록 일반화하기 위하여 두 개의
기본적인 관계식 (2.29)와 (2.30)을 생각한다. 구간(-∞, ∞)8에서 제곱 적분이 가능하도록 x(t)
가 비주기적이지만 에너지 신호라고 가정하자. 그러면 구간 |t|<12 T0에서 x(t)를 다음과 같이
8 �-∞∞|x(t)|dt<∞이면 푸리에 변환 적분은 수렴한다. 이것은 x(t)가 에너지 신호이면 충분하다는 것을 의미한
다. 디리클레의 조건은 신호가 푸리에 변환을 가지기 위한 충분조건을 말한다. 절댓값의 적분이 유한한 것 이외에 x(t)가 유한 구간에서 유한 개의 최댓값, 최솟값과 유한 개의 불연속점을 가지는 단사 함수이어야 한다.








![f Mõ8 ù ùd ¸ ¸ ½ Ð...q= ´ ´ , ËØ ] î w& &t îÅ«'¨ U* 0Û o) Ý Ì ] ' >&1 *ñ d"'>' ` c K Ñt ¸ þ q=´ ´ , ËØ c K Ñø ¢-C £ q=´ ´ , ËØsss ¢-C ´ £ º |ó](https://img.dokumen.tips/doc/110x75/5ff82d8119777e5f1908d8ff/f-m8-d-q-w-t-u-0.jpg)













![0¨ÈØÁ ã¯È  ¨ëØ ØÜãÜ Á Üã Ø Á¯ ¯È Á¯ w] w ~ w · 0¨ÈØÁ ã¯È  ¨ëØ ØÜãÜ Á Üã Ø Á¯ ¯È Á¯ w] w ~ w ¼¼ Ø Â¨ © ¯Üã Ü](https://img.dokumen.tips/doc/110x75/5e11cc393037a25b03474991/0-oeoe-oe-w-w-w.jpg)
![@LiVV©s« @ÍØý ¤¦¦¦ }msLiRV»] [ @ÖÁ£mns Íت±sVdownload.understandquran.com/fileadmin/user_upload/vocabulary/... · 12. qsWLRi£¤¦¦¦ ¸¶RVWqsV£msn Ëس giRLi:](https://img.dokumen.tips/doc/110x75/5fea2f3b9f606a22622641a5/livvs-mslirv-mns-12-qswlri.jpg)




