Embed Size (px)
Citation preview
EEL205 : Signals and Systems
Kushal K. ShahAsst. Prof. @ EE, IIT Delhi
Email : [email protected] : http://web.iitd.ac.in/~kkshah
Z Transform
Z Transform
X (z) =∞
∑n=−∞
x [n]z−n z = re jω
=∞
∑n=−∞
{x [n] r−n
}e−jωn
= F{x [n] r−n
}X (jω) = X (z)
∣∣∣∣∣r=1
ROC : range of r for which X (z) converges
Z Transform
X (z) =∞
∑n=−∞
x [n]z−n z = re jω
=∞
∑n=−∞
{x [n] r−n
}e−jωn
= F{x [n] r−n
}X (jω) = X (z)
∣∣∣∣∣r=1
ROC : range of r for which X (z) converges

Z Transform
X (z) =∞
∑n=−∞
x [n]z−n z = re jω
=∞
∑n=−∞
{x [n] r−n
}e−jωn
= F{x [n] r−n
}X (jω) = X (z)
∣∣∣∣∣r=1
ROC : range of r for which X (z) converges

Z Transform
X (z) =∞
∑n=−∞
x [n]z−n z = re jω
=∞
∑n=−∞
{x [n] r−n
}e−jωn
= F{x [n] r−n
}X (jω) = X (z)
∣∣∣∣∣r=1
ROC : range of r for which X (z) converges
Z Transform
X (z) =∞
∑n=−∞
x [n]z−n z = re jω
=∞
∑n=−∞
{x [n] r−n
}e−jωn
= F{x [n] r−n
}X (jω) = X (z)
∣∣∣∣∣r=1
ROC : range of r for which X (z) converges
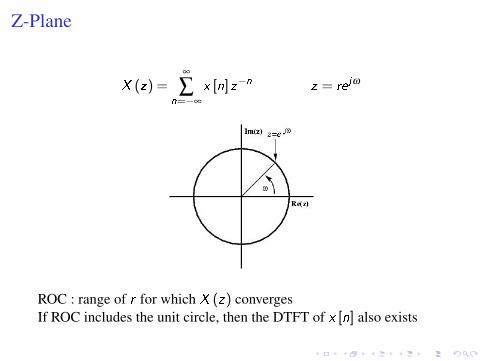
Z-Plane
X (z) =∞
∑n=−∞
x [n]z−n z = re jω
ROC : range of r for which X (z) convergesIf ROC includes the unit circle, then the DTFT of x [n] also exists
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
=∞
∑n=−∞
anu [n]z−n
=∞
∑n=0
(az−1
)n=
1
1−az−1if
∣∣az−1∣∣ < 1
=z
z−aif |z |> |a|
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
=∞
∑n=−∞
anu [n]z−n
=∞
∑n=0
(az−1
)n=
1
1−az−1if
∣∣az−1∣∣ < 1
=z
z−aif |z |> |a|
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
=∞
∑n=−∞
anu [n]z−n
=∞
∑n=0
(az−1
)n=
1
1−az−1if
∣∣az−1∣∣ < 1
=z
z−aif |z |> |a|
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
=∞
∑n=−∞
anu [n]z−n
=∞
∑n=0
(az−1
)n=
1
1−az−1if
∣∣az−1∣∣ < 1
=z
z−aif |z |> |a|
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
=∞
∑n=−∞
anu [n]z−n
=∞
∑n=0
(az−1
)n=
1
1−az−1if
∣∣az−1∣∣ < 1
=z
z−aif |z |> |a|
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
=∞
∑n=−∞
anu [n]z−n
=∞
∑n=0
(az−1
)n=
1
1−az−1if
∣∣az−1∣∣ < 1
=z
z−aif |z |> |a|
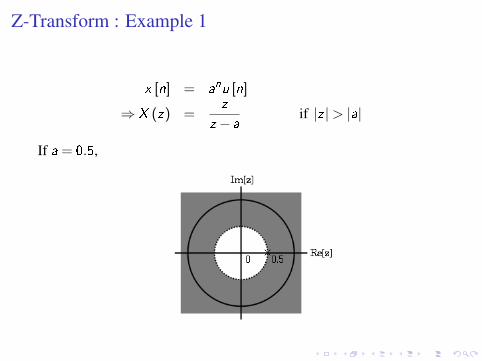
Z-Transform : Example 1
x [n] = anu [n]
⇒ X (z) =z
z−aif |z |> |a|
If a = 0.5,
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
= −∞
∑n=−∞
anu [−n−1]z−n
= −−1
∑n=−∞
(az−1
)n=−
∞
∑n=1
(a−1z
)n=
z
z−aif |z |< |a|
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
= −∞
∑n=−∞
anu [−n−1]z−n
= −−1
∑n=−∞
(az−1
)n=−
∞
∑n=1
(a−1z
)n=
z
z−aif |z |< |a|
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
= −∞
∑n=−∞
anu [−n−1]z−n
= −−1
∑n=−∞
(az−1
)n=−
∞
∑n=1
(a−1z
)n=
z
z−aif |z |< |a|
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
= −∞
∑n=−∞
anu [−n−1]z−n
= −−1
∑n=−∞
(az−1
)n=−
∞
∑n=1
(a−1z
)n=
z
z−aif |z |< |a|
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
= −∞
∑n=−∞
anu [−n−1]z−n
= −−1
∑n=−∞
(az−1
)n=−
∞
∑n=1
(a−1z
)n=
z
z−aif |z |< |a|
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =∞
∑n=−∞
x [n]z−n
= −∞
∑n=−∞
anu [−n−1]z−n
= −−1
∑n=−∞
(az−1
)n=−
∞
∑n=1
(a−1z
)n=
z
z−aif |z |< |a|
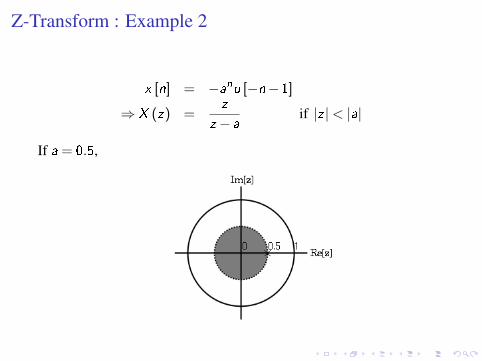
Z-Transform : Example 2
x [n] = −anu [−n−1]
⇒ X (z) =z
z−aif |z |< |a|
If a = 0.5,
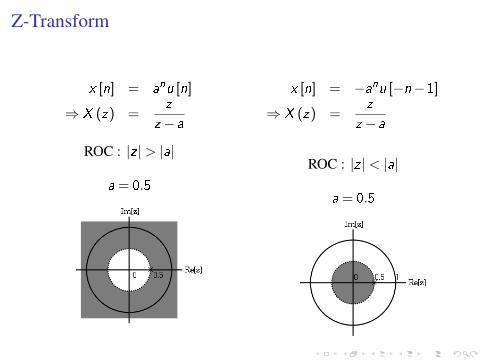
Z-Transform
x [n] = anu [n]
⇒ X (z) =z
z−a
ROC : |z |> |a|
a = 0.5
x [n] = −anu [−n−1]
⇒ X (z) =z
z−a
ROC : |z |< |a|
a = 0.5
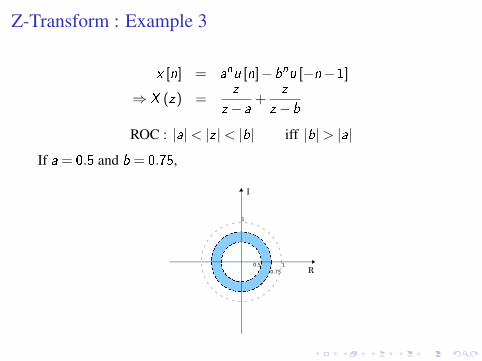
Z-Transform : Example 3
x [n] = anu [n]−bnu [−n−1]
⇒ X (z) =z
z−a+
z
z−b
ROC : |a|< |z |< |b| iff |b|> |a|
If a = 0.5 and b = 0.75,
R
I
1
1
0.5
0.75
Z-Transform : Example 4
x [n] = b|n| b > 0
= bnu [n]−b−nu [−n−1]
⇒ X (z) =z
z−b+
z
z−1/b
ROC1 : |z |> b
ROC2 : |z |< 1/b
ROC : b < |z |< 1
biff 0 < b < 1
Z-Transform : Example 4
x [n] = b|n| b > 0
= bnu [n]−b−nu [−n−1]
⇒ X (z) =z
z−b+
z
z−1/b
ROC1 : |z |> b
ROC2 : |z |< 1/b
ROC : b < |z |< 1
biff 0 < b < 1
Z-Transform : Example 4
x [n] = b|n| b > 0
= bnu [n]−b−nu [−n−1]
⇒ X (z) =z
z−b+
z
z−1/b
ROC1 : |z |> b
ROC2 : |z |< 1/b
ROC : b < |z |< 1
biff 0 < b < 1
Z-Transform : Example 4
x [n] = b|n| b > 0
= bnu [n]−b−nu [−n−1]
⇒ X (z) =z
z−b+
z
z−1/b
ROC1 : |z |> b
ROC2 : |z |< 1/b
ROC : b < |z |< 1
biff 0 < b < 1
Z-Transform : Example 4
x [n] = b|n| b > 0
= bnu [n]−b−nu [−n−1]
⇒ X (z) =z
z−b+
z
z−1/b
ROC1 : |z |> b
ROC2 : |z |< 1/b
ROC : b < |z |< 1
biff 0 < b < 1
Z-Transform : Example 4
x [n] = b|n| b > 0
= bnu [n]−b−nu [−n−1]
⇒ X (z) =z
z−b+
z
z−1/b
ROC1 : |z |> b
ROC2 : |z |< 1/b
ROC : b < |z |< 1
biff 0 < b < 1
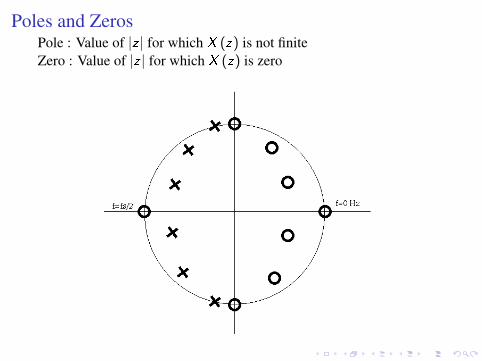
Poles and ZerosPole : Value of |z | for which X (z) is not finiteZero : Value of |z | for which X (z) is zero
Properties of ROC
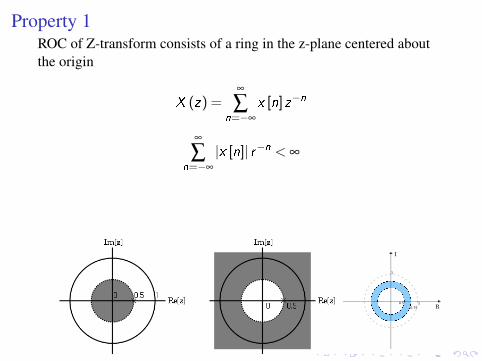
Property 1ROC of Z-transform consists of a ring in the z-plane centered aboutthe origin
X (z) =∞
∑n=−∞
x [n]z−n
∞
∑n=−∞
|x [n]| r−n < ∞
R
I
1
1
0.5
0.75
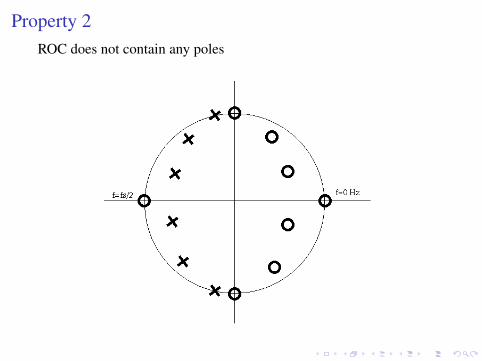
Property 2ROC does not contain any poles
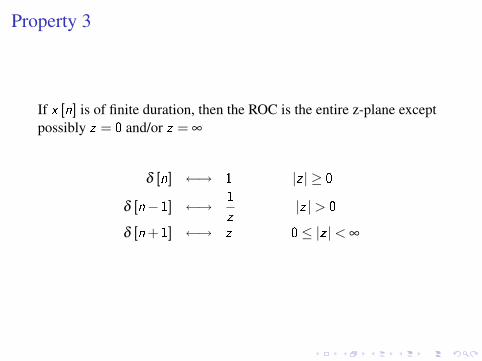
Property 3
If x [n] is of finite duration, then the ROC is the entire z-plane exceptpossibly z = 0 and/or z = ∞
δ [n] ←→ 1 |z | ≥ 0
δ [n−1] ←→ 1
z|z |> 0
δ [n+1] ←→ z 0≤ |z |< ∞
Property 4
If x [n] is a right-handed signal, and if the circle |z |= r0 is in the ROC,then all finite values of z for which |z |> r0 will also be in the ROC.
∞
∑n=N1
|x [n]| r−n0
< ∞
⇒∞
∑n=N1
|x [n]| r−n < ∞ if r > r0
Property 5
If x [n] is a left-handed signal, and if the circle |z |= r0 is in the ROC,then all finite values of z for which |z |< r0 will also be in the ROC.
N2
∑n=−∞
|x [n]| r−n0
< ∞
⇒N2
∑n=−∞
|x [n]| r−n < ∞ if r < r0
Property 6
If x [n] is a two-handed signal, and if the circle |z |= r0 is in the ROC,then the ROC will consist of a ring in the z-plane that includes thecircle |z |= r0
Property 7
If X (z) is rational, then the ROC is bounded by poles or extends toinfinity
Property 8
If X (z) is rational, and if x [n] is right-sided, then the ROC is theregion in z-plane outside the outermost pole
If x [n] is causal, then the ROC of X (z) extends to infinity
Property 9
If X (z) is rational, and if x [n] is left-sided, then the ROC is theregion in z-plane inside the innermost pole
If x [n] is anti-causal, then the ROC of X (z) also includes z = 0
Property 10
The ROC must be a connected region
Properties of Z-Transform
Z-Transform : PropertiesI Linearity
ax1 +bx2 ←→ aX1 +bX2 ROC contains R1∩R2
x1 = x2 b =−a
I Time shifting
x [n−n0]←→ z−n0X (z) ROC=R±{0,∞}
I Scaling in the z-domain
zn0 x [n]←→ X
(z
z0
)ROC= |z0|R
If |z0|= 1,
e jω0nx [n]←→ X(e−jω0nz
)ROC=R
Z-Transform : PropertiesI Linearity
ax1 +bx2 ←→ aX1 +bX2 ROC contains R1∩R2
x1 = x2 b =−a
I Time shifting
x [n−n0]←→ z−n0X (z) ROC=R±{0,∞}
I Scaling in the z-domain
zn0 x [n]←→ X
(z
z0
)ROC= |z0|R
If |z0|= 1,
e jω0nx [n]←→ X(e−jω0nz
)ROC=R
Z-Transform : PropertiesI Linearity
ax1 +bx2 ←→ aX1 +bX2 ROC contains R1∩R2
x1 = x2 b =−a
I Time shifting
x [n−n0]←→ z−n0X (z) ROC=R±{0,∞}
I Scaling in the z-domain
zn0 x [n]←→ X
(z
z0
)ROC= |z0|R
If |z0|= 1,
e jω0nx [n]←→ X(e−jω0nz
)ROC=R
Z-Transform : Properties
I Linearity
ax1 +bx2 ←→ aX1 +bX2 ROC contains R1∩R2
x1 = x2 b =−a
I Time shifting
x [n−n0]←→ z−n0X (z) ROC=R±{0,∞}
I Scaling in the z-domain
zn0 x [n]←→ X
(z
z0
)ROC= |z0|R
If |z0|= 1,
e jω0nx [n]←→ X(e−jω0nz
)ROC=R
Z-Transform : PropertiesI Time Reversal
x [−n]←→ X
(1
z
)ROC=
1
R
I Time Expansion
x(k) [n]←→ X(zk
)ROC=R1
/k
I Conjugation
x∗ [n]←→ X ∗ (z∗) ROC=R
I Convolution
x1 [n]∗ x2 [n]←→ X1 (z)X2 (z) ROC contains R1∩R2
Z-Transform : PropertiesI Time Reversal
x [−n]←→ X
(1
z
)ROC=
1
R
I Time Expansion
x(k) [n]←→ X(zk
)ROC=R1
/k
I Conjugation
x∗ [n]←→ X ∗ (z∗) ROC=R
I Convolution
x1 [n]∗ x2 [n]←→ X1 (z)X2 (z) ROC contains R1∩R2
Z-Transform : Properties
I Time Reversal
x [−n]←→ X
(1
z
)ROC=
1
R
I Time Expansion
x(k) [n]←→ X(zk
)ROC=R1
/k
I Conjugation
x∗ [n]←→ X ∗ (z∗) ROC=R
I Convolution
x1 [n]∗ x2 [n]←→ X1 (z)X2 (z) ROC contains R1∩R2
Z-Transform : Properties
I Time Reversal
x [−n]←→ X
(1
z
)ROC=
1
R
I Time Expansion
x(k) [n]←→ X(zk
)ROC=R1
/k
I Conjugation
x∗ [n]←→ X ∗ (z∗) ROC=R
I Convolution
x1 [n]∗ x2 [n]←→ X1 (z)X2 (z) ROC contains R1∩R2
Z-Transform : Properties
I Differentiation in z-domain
nx [n]←→−z dXdz
ROC=R
I Initial Value Theorem
x [0] = limz→∞
X (z) if x [n] = x [n]u [n]
X (z) =∞
∑n=0
x [n]z−n
Z-Transform : Properties
I Differentiation in z-domain
nx [n]←→−z dXdz
ROC=R
I Initial Value Theorem
x [0] = limz→∞
X (z) if x [n] = x [n]u [n]
X (z) =∞
∑n=0
x [n]z−n
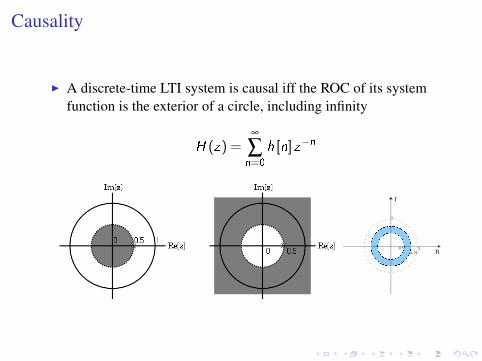
Causality
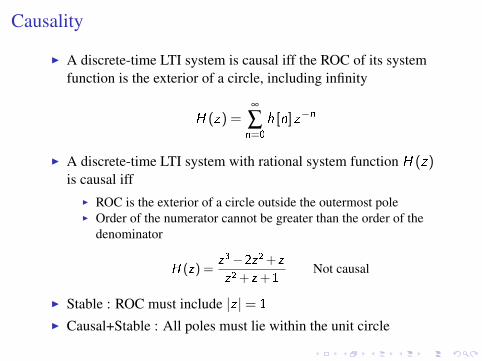
I A discrete-time LTI system is causal iff the ROC of its systemfunction is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
R
I
1
1
0.5
0.75
CausalityI A discrete-time LTI system is causal iff the ROC of its system
function is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
I A discrete-time LTI system with rational system function H (z)is causal iff
I ROC is the exterior of a circle outside the outermost poleI Order of the numerator cannot be greater than the order of the
denominator
H (z) =z3−2z
2 + z
z2 + z +1Not causal
I Stable : ROC must include |z |= 1
I Causal+Stable : All poles must lie within the unit circle
CausalityI A discrete-time LTI system is causal iff the ROC of its system
function is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
I A discrete-time LTI system with rational system function H (z)is causal iff
I ROC is the exterior of a circle outside the outermost poleI Order of the numerator cannot be greater than the order of the
denominator
H (z) =z3−2z
2 + z
z2 + z +1Not causal
I Stable : ROC must include |z |= 1
I Causal+Stable : All poles must lie within the unit circle
CausalityI A discrete-time LTI system is causal iff the ROC of its system
function is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
I A discrete-time LTI system with rational system function H (z)is causal iff
I ROC is the exterior of a circle outside the outermost poleI Order of the numerator cannot be greater than the order of the
denominator
H (z) =z3−2z
2 + z
z2 + z +1Not causal
I Stable : ROC must include |z |= 1
I Causal+Stable : All poles must lie within the unit circle
Causality
I A discrete-time LTI system is causal iff the ROC of its systemfunction is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
I A discrete-time LTI system with rational system function H (z)is causal iff
I ROC is the exterior of a circle outside the outermost poleI Order of the numerator cannot be greater than the order of the
denominator
H (z) =z3−2z
2 + z
z2 + z +1Not causal
I Stable : ROC must include |z |= 1
I Causal+Stable : All poles must lie within the unit circle
Causality
I A discrete-time LTI system is causal iff the ROC of its systemfunction is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
I A discrete-time LTI system with rational system function H (z)is causal iff
I ROC is the exterior of a circle outside the outermost poleI Order of the numerator cannot be greater than the order of the
denominator
H (z) =z3−2z
2 + z
z2 + z +1Not causal
I Stable : ROC must include |z |= 1
I Causal+Stable : All poles must lie within the unit circle
Causality
I A discrete-time LTI system is causal iff the ROC of its systemfunction is the exterior of a circle, including infinity
H (z) =∞
∑n=0
h [n]z−n
I A discrete-time LTI system with rational system function H (z)is causal iff
I ROC is the exterior of a circle outside the outermost poleI Order of the numerator cannot be greater than the order of the
denominator
H (z) =z3−2z
2 + z
z2 + z +1Not causal
I Stable : ROC must include |z |= 1
I Causal+Stable : All poles must lie within the unit circle
Inverse Z-Transform
I Inspection MethodI Partial Fraction MethodI Power Series Method
X (z) =∞
∑n=−∞
x [n]z−n
Inverse Z-Transform
I Inspection MethodI Partial Fraction MethodI Power Series Method
X (z) =∞
∑n=−∞
x [n]z−n
Inverse Z-Transform
I Inspection MethodI Partial Fraction MethodI Power Series Method
X (z) =∞
∑n=−∞
x [n]z−n

![Synthesis of (9 Z,12 E)- and (9 E,12 Z)-[1- 14C]linoleic acid and (5 Z,8 Z,11 Z,14 E)-[1- 14C]arachidonic ácid](https://img.dokumen.tips/doc/110x75/63346fbee9e768a27a100b80/synthesis-of-9-z12-e-and-9-e12-z-1-14clinoleic-acid-and-5-z8-z11-z14.jpg)



























