Embed Size (px)
Citation preview

Introduction
Flow modelling of nematic liquid crystals is an activearea of applied and fundamental research (Rey andDenn 2002). Nematic liquid crystals are orientationallyordered materials and arise with anisodiametric (rod-likeor disk-like) molecules or particles. The state of or-ientation is characterized by the orientation distributionfunction (ODF), given in terms of surface sphericalharmonics (de Gennes and Prost 1993). The secondmoment of the ODF is known as the tensor orderparameter Q, and the eigenvector corresponding to thelargest eigenvalue of Q is known as the director n. Flowmodelling of nematic liquid crystals can be performedusing the dynamics of the ODF (Doi and Edwards1986;
Larson 1999; Marruci and Greco 1993), the dynamics ofQ (Beris and Edwards 1994; Tsuji and Rey 1997; Reyand Denn 2002), and the dynamics of n (Leslie 1979),known as the Leslie-Ericksen model. A recent review(Rey and Denn 2002) describes all these models in suf-ficient detail.
In this paper we use a previously presented tensororder parameter model (Tsuji and Rey 1997; Rey andDenn 2002) based on the Landau-de Gennes free energythat takes into account long-range elasticity, short-rangeelasticity and flow-induced effects. The Leslie-Ericksen(LE) model does not include short range elasticity,which is needed to capture defect nucleation.
The nematic liquid crystal phase considered in thispaper is the discotic nematic mesophase. Figure 1 shows
Dana Grecov
Alejandro D. ReyTransient rheology of discotic mesophases
Received: 18 December 2002Accepted: 8 May 2003Published online: 20 August 2003� Springer-Verlag 2003
Abstract This paper presents ananalysis of the role of orientation onthe rheology of discotic mesophasessubjected to slow shear start-upflows, using a projection of theLandau-de Gennes equations of ne-matodynamics. Analysis of the shearstress surface as a function of tilt andtwist orientation with respect to theshear plane shows that the stresssurface is dense in well-oriented andperiodically located sets of maximaand minima. Thus overshoots andundershoot stress responses toshear-start up are predicted to be therule rather than the exception. In-plane (within the shear plane) shearstart-up stress responses can exhibitmultiple, single, or no overshoots,depending on the number of maxima
traversed on the way to steady state.Responses originating from orienta-tions close to the vorticity axis leadto stress undershoots. Complexstress responses, such as a weakovershoot-strong undershoot se-quence, are found for intermediatetilt-twist initial states. In-planemodes lead to amplitude and strainscaling. Out-of-plane modes do notdisplay amplitude or strain scaling.These results provide will be usefulto interpret and use transient shearrheological data of carbonaceousmesophases and highly filled sus-pensions of disc-like particles.
Keywords Shear start-up Æ Discoticmesophases Æ Stress response ÆStress overshoots Æ Stress scaling
Rheol Acta (2003) 42: 590–604DOI 10.1007/s00397-003-0316-9 ORIGINAL CONTRIBUTION
D. Grecov Æ A.D. Rey (&)Department of Chemical Engineering,McGill University, 3610 University Street,Montreal, Quebec, H3A 2B2, CanadaE-mail: [email protected]

the molecular geometry, positional disorder, and uni-axial orientational order of discotic nematic liquidcrystals (DNLCs). The partial orientational order of themolecular unit normal u is along the average orientationor director n (nÆn=1). The shear flow behaviour andrheology of DNLCs depends on the sign and magnitudeof the reactive parameter k, which is the ratio of the flowaligning effect of the deformation rate and the tumbling(rotational) effect of the vorticity. For DNLCs it isknown that k<0 (Carlsson 1982). When k<)1 thematerial flow aligns close to the velocity gradient di-rection since the rotational effect of vorticity is overcomeby deformation. When )1<k<0 the director does notalign close to the velocity gradient direction because therotational effect of vorticity dominates over the aligningeffect of deformation. Materials with k<)1 display theflow-aligning mode. It should be mentioned that forthermotropic low-molecular mass nematics the onlymechanism that leads to non-aligning behaviour is theproximity to the smectic A phase (Han and Rey 1995). Ithas been shown that, for example, 8CB (4¢-n-octyl-4-cyanobiphenyl) is a shear flow-aligning nematic at hightemperatures but as the temperature approaches thenematic-smectic A transition temperature, the materialloses its ability to orient with the flow and out-of-planeorientation and defect nucleation is likely to occur (Hanand Rey 1995). Hydroxy-propyl cellulose (HPC) in sui-table solvents exhibits non-aligning behaviour at lowshear-rates and flow-aligning behaviour at high shearrates. The transition from the polymeric systems occursat shear rates c[100 s)1 (Larson and Mead 1992). Nosystematic data that shows that thermotropic liquidcrystals such as Vectra is a non-aligning materials hasbeen presented. At present here appears to be consensusthat thermotropic nematic polymers are flow-aligning(Ugaz et al. 2001). The rheological behaviour of a lowmolar mass nematogens (LMMN)-5CB was studied byDong-Feng and Jamieson (1994) and it was found thatin flow start-up it shows over its entire nematic range astress overshoot, typical for flow-alignment. Althoughno published data is available for discotic nematic liquid
crystals, it is highly likely that the complex shear stressbehaviour observed for various liquid crystalline mate-rials subjected to shear start-up flow will also be presentin discotic mesophases.
In this paper we model the shear start-up rheologicalbehaviour of flow aligning discotic liquid crystals. Flowstart-up data on LCPs have been mainly obtained withheterogeneous initial conditions, and several responseshave been reported. LCPs can exhibit large shear stressovershoots upon flow inception (Han et al. 2001; Ugazet al. 2001; Viola and Bird 1986; Beekmans et al. 1996;Mather et al. 2000). The start-up shear stress for athermotropic polymer, as reported by Cogswell andWissbrun (1996) is shown to exhibit a sharp maximumat a small strain (two or three units of strain), and afteran undershoot it climbs to a broad second maximum ata large strain. Another transient response during start-up of steady flow for a LPC was reported by Guskey andWinter (1991). The start-up curve shows a maximum ata small strain, followed by an undershoot and a mono-tonically increase to the steady state value. For a ther-motropic flow aligning liquid crystalline polymer(DHMS-7,9) (Ugaz et al. 2001) the evolution of shearstress during flow inception is characterized by a singleovershoot peak.
In this paper we present predictions for the transientshear flow rheology of DNLCs using different initial andorientation wall anchoring conditions. Such sets ofrheological and structural data calculated under wellcontrolled conditions provide the opportunity to showthat our theory is capable of realistic predictions for thestructure and rheology of flow aligning liquid crystals.The goal of this paper is to develop a qualitative dy-namic model for the transient response of discotic me-sophases. We are particularly interest in revealing thecharacteristic features of flow aligning systems. We use aprojection of the Landau-de Gennes model into the L-Eequations, to predict, organize, classify, and explain si-mulated results. It will be seen that for slow flows theLandau-de Gennes model (or equivalently, the LEequations) model admits a remarkably wide range oftransient phenomena, some of which have been observedwith rod-like liquid crystalline materials.
The particular objectives of the paper are to: (1)characterize the transient shear stress of flow-aligningDNLCs, (2) elucidate the specific role of the orientationon the rheology of flow-aligning DNLCs. All resultspertain to insignificant Deborah numbers (Rey andDenn 2002) where flow only affects macroscopicorientation.
This paper is organized as follows. First we presentthe governing equations that describe the microstructurefor discotic nematics under arbitrary flow. Then a uni-fied expression for the extra stress tensor is given. Fol-lowing this we show some results for the shear stressusing the L-E theory. The numerical procedure is then
Fig. 1 Definition of director n of a discotic nematic liquid crystal.The director n is the average director of the unit normals to thedisk-like molecules
591

presented and, following this, we present the computa-tional results for the transient shear stress obtained withthe Landau-de Gennes model. Finally, conclusions aregiven.
Theory and governing equations
The Landau-de Gennes theory of liquid crystals (Tsujiand Rey 1997) describes the viscoelastic behavior ofnematic liquid crystals using the second moment of theorientation distribution function, known as the tensororder parameter Q. As mentioned above, the micro-structure of DNLCs is described conveniently in termsof a second-order, symmetric and traceless tensor orderparameter Q (de Gennes and Prost 1993):
Q ¼Z
uu� I
3
� �f d2u ð1Þ
where u is the unit vector normal to the disk-like mole-cules (see Fig. 1), I is unit tensor. The tensor orderparameter Q can be expressed by
Q ¼ Sðnn� 1
3IÞ þ 1
3P mm� llð Þ ð2Þ
where the following restrictions apply:
Q ¼ QT ; tr Qð Þ ¼ 0; � 1
2� S � 1; � 3
2� P � 3
2
ð3Þ
n �n¼m �m¼ l � l¼1; nnþmmþ ll¼I¼1 0 00 1 00 0 1
24
35 ð4Þ
The uniaxial director n corresponds to the maximumeigenvalue ln¼ 2
3S, the biaxial director m correspondsthe second largest eigenvalue lm¼�1
3 S�Pð Þ, and thesecond biaxial director l (=n·m) corresponds to thesmallest eigenvalue lr¼�1
3 SþPð Þ. The orientation isdefined completely by the orthogonal director triad (n,m, l). The magnitude of the uniaxial scalar order para-meter S is a measure of the molecular alignment alongthe uniaxial director n, and is given as S¼ 3
2 n �Q �nð Þ. Themagnitude of the biaxial scalar order parameter P is ameasure of the molecular alignment in a plan perpen-dicular to the direction of uniaxial director n, and isgiven as P¼ 3
2 m �Q �m� l �Q � lð Þ. On the principal axes,the tensor order parameter Q is represented as
Q ¼� 1
3 S� Pð Þ 0 00 � 1
3 ðSþ PÞ 00 0 2
3 S
24
35 ð5Þ
where both S and P are positive for normal DNLCs. TheLandau-de Gennes model uses the tensor order para-
meter to describe nematic ordering. According to Eq. (4),the model is able to describe biaxial (S „ 0, P „ 0),uniaxial (S „ 0, P=0), and isotropic (S=0, P=0) states.
The governing equations for liquid crystal flows fol-low from the dissipation function D:
D ¼ ts: Aþ ckTH:Q̂Q ð6Þ
where ts is the viscoelastic stress tensor, c is the con-
centration of molecules per unit volume, k the Boltz-mann constant and T the absolute temperature, A is thesymmetric traceless rate of deformation tensor, H is themolecular field, and Q̂Q is the Jaumann derivative of thetensor order parameter, given by
A ¼ 12 rvþrv
T� �
ð7aÞ
Q̂Q ¼ @Q@tþ v � rð ÞQ�W �QþQ �W ð7bÞ
W ¼ 12 rv�rv
T� �
ð7cÞ
ðckT ÞH ¼ � dFdQ
� �½s�¼ @f
@Q�r � @f
@rQ
� �½s�ð7dÞ
where F is the total free energy and f is the free energydensity:
f ¼ ðckT Þ½ 12
1� 1
3U
� �Q : Q� 1
3UQ : Q �Qð Þ
þ 1
4U Q : Qð Þ2 þ L1
2ckTrQ : rQð ÞTn o
þ L2
2ckTr �Qð Þ � r �Qð Þ�
ð8Þ
where U=3T*/T is the nematic potential, T* is theisotropic-nematic transition temperature, L1 and L2 arethe Landau coefficients, and the superscript [s] denotessymmetric and traceless. Using the Landau-de Gennesfree energy density, the molecular field is given by
��dFdQ
�½s�¼ ðckT ÞH ¼ �ðckT Þ
��1� 1
3U�Q� UQ �Q
þ U�
Q : Q�Qþ 1
3
�Q : Q
�I�
þ ðckT Þ� L1
ckTr2Qþ 1
2
L2
cjT
�r�r �Q
�
þr�r �Q
�T � 23trr�r �Q
�I��
ð9Þ
and contains short range and long range contributions.Expanding the forces (ts, Q̂Q) in terms of fluxes (A,ckTH), and taking into account thermodynamic re-strictions and the symmetry and tracelessness of theforces and fluxes we can obtain the equations for ts andQ̂Q. The dynamics of the tensor order parameter is given
592

by the following sum of flow F, short range Hsr, andlong range Hlr contributions (Singh and Rey 2000):
Q̂Q ¼ F Q;rvð Þ þH;H ¼ Hsr Q; �DDr Qð Þð Þ þHlr rQð Þð10Þ
(i) flow contribution F:
F�Q;rv
�¼ 2
3bAþ b�A �QþQ � A� 2
3
�A : Q
�I�
� 12b��A : Q
�Qþ A �Q �QþQ � A �Q
þQ �Q � A��
Q �Q�
: AI�
ð11Þ
(ii) short-range elastic contribution Hsr:
Hsr�Q; �DDr
�Q��¼ �6�DDr
��1� 1
3U�Q� UQ �Q
þ U�
Q : Q�Qþ 1
3
�Q : Q
�I� ð12Þ
(iii) long-range elastic contribution Hlr:
Hlr�Q�¼ 6�DDr
� L1
ckTr2Qþ1
2
L2
cjT
�r�r�Q
�
þr�r�Q
�T �23trr�r�Q
�I�� ð13Þ
�DDr ¼Dr
1� 32Q : Q
� � ð14Þ
where �DDr is the microstructure dependent rotationaldiffusivity, Dr is the pre-averaged rotational diffusivityhere taken to be constant and b is a thermodynamic para-meter which is not determined by molecular shape sinceour model contains no specific molecular information.
The dimensionless form of the governing equation forthe tensor order parameter Q is
t� ¼ _cct; A� ¼ A
_cc; r� ¼ Hr; L�2 ¼
L2
L1ð16Þ
where the star superscript denotes dimensionless quan-tities, _cc is a characteristic shear rate. The dimensionlessnumbers Er (Ericksen number) and energy ratio R (Tsujiand Rey 1997) are given by
Er ¼ _ccH2ckT �
2L1Drð17aÞ
R ¼ 3H2ckT �
L1ð17bÞ
and give the ratio of viscous flow effects to long-rangeorder elasticity, and short-range order elasticity to long-range order elasticity, respectively. The relation betweenEr, R, and the Deborah number is
De ¼ Er
Rð18Þ
The parametric and flow conditions used in this papercorrespond to De � 1.
Total extra stress tensor equation
The total extra stress tensor tt for liquid crystalline
materials is given by the sum of symmetric viscoelasticstress tensor t
s, anti-symmetric stress tensor, andEricksen stress tensor tEr (Singh and Rey 1998; Farhoudiand Rey 1993a):
tt ¼ ts þ ta þ tEr ð19Þ
The symmetric viscoelastic stress tensor ts is ex-
pressed as a sum of a symmetric viscous stress con-tribution t
v and an elastic stress contribution te (de
Gennes and Prost 1993; Singh and Rey 1998; Larson1996) as
ts ¼ tv þ te ð20Þ
and obtained using the dissipation expansion at Eq. (6).The stress contribution tv found is given by
tv ¼ m1Aþ m2Q � Aþ A �Q� 2
3
�Q : A
�I
þ m4��A : Q
�Qþ A �Q �QþQ � A �QþQ �Q � A
þ�
Q �Q�
: AI�
ð21Þ
where m1, m2, m4 are viscosities coefficients. Characteristicvalues for these viscosities coefficients for DNLCs willbe found by mapping the total stress tensor with thestress tensor given by the Leslie-Ericksen vector theory(Grecov and Rey 2002). The elastic contribution te thatcouples stress to the molecular field H is given as
ErQ̂Q� ¼ Er�23bA� þ b
�A� �QþQ � A� � 2
3
�A�:Q
�I�
� 12b��A� : Q
�Qþ A� �Q �QþQ � A� �QþQ �Q � A� �
�Q �Q
�: A�
I��
� 3U � R�
1�32Q:Q
�2 ��1� 13
U�Q� UQ �Qþ U
�Q : Q
�Qþ 1
3
�Q : Q
�I�
þ 3�1�3
2Q:Q��r�2Qþ 1
2L�2�r��r� �Q
�þr��r� �Q
�T � 23trr��r� �Q
�I��
ð15Þ
593

te ¼�ckT�½� 2
3bH� b
H �QþQ �H� 2
3
�H : Q
�I
þ 1
2b��H : Q
�QþH �Q �QþQ �H �QþQ �Q �H
��
Q �Q�
: HI�� ð22Þ
The antisymmetric contribution ta arises wheneverH.Q is not symmetric, and is given as (Farhoudi andRey 1993a, 1993b)
ta ¼ ckT H �Q�Q �Hð Þ ð23Þ
The Ericksen stress contribution tEr arises from thelong range elasticity and is given as (Farhoudi and Rey1993b)
tEr ¼ � @f@rQ : rQð ÞT
¼ �L1rQ : rQð ÞT � L2 r �Qð Þ � rQð ÞTh i
ð24Þ
Summing up all the contributions and non-dimensionalising (H is already nondimensional):
where
~ttt ¼ tt
ckT � ; m�1 ¼m16Dr
ckT � ; m�2 ¼m26Dr
ckT� ; m�4 ¼m46Dr
ckT �ð26Þ
Thus the total dimensionless stress tensor (Eq. 25) isneither symmetric nor traceless:
~ttt ¼
~ttxx ~ttxy ~ttxz
~ttyx ~ttyy ~ttyz
~ttzx ~ttzy ~ttzz
264
375 ð27Þ
The dimensionless first normal stress difference (N1)and the dimensionless apparent shear viscosity (g) used
to characterize the steady shear rheological materialfunctions are given by
N1 ¼ ~ttxx �~ttyy ¼txx � tyy
ckT �; g ¼ tyx
_cc� 6DrckT �
ð28Þ
Projection of Landau-de Gennes modelinto Leslie-Ericksen equations
The most successful and established theory applicable toslow uniaxial nematic flows is that of Leslie and Ericksen(Leslie 1979). It was shown (Tsuji and Rey 1997) thatwhen the ratio between Ericksen number and R is in-significant (i.e. slow flow), the Landau-de Gennes modelreduces to the Leslie-Ericksen theory, when the splayand bend elastic modulus (see Eq. 32) are equal. Despiteits simplicity, the L-E model is seen to admit a widerange of unusual transient phenomena for slow shearstart-up flow. Since the Landau-de Gennes model atsufficiently slow flows becomes the LE model, it is usefulto use the easily obtained predictions of the LE model in
order to explain and classify the response of the morecomplicated Landau-de Gennes model. We note that allour computational results discussed in the followingsections were obtained using the original Landau-deGennes equations (Eq. 15).
As mentioned above the L-E theory neglects theshort range order elasticity, and hence it is unable todescribe the changes of the scalar order parameter dueto the imposition of sufficiently strong flow.Consequently, in this theory, the microstructure isdescribed by the director n and the scalar orderparameter S is assumed to remain constant, that is,unaffected by the flow, and always equal to its value atequilibrium: S=Seq, while the biaxial order parameterP is equal to zero. The total extra-stress tensor tt and
~ttt ¼ Er
Rðv�1A� þ v�2fQ � A� þ A� �Q� 2
3Q:A�ð ÞIg:
þm�4 A� : Qð ÞQþ A� �Q �QþQ � A� �QþQ �Q � A� � Q �Qð Þ:A�f gI½ ��
þ 3
U� 2
3bH� b H �QþQ �H� 2
3H : Qð ÞI
� �� �
þ 3
2Ub H:Qð ÞQþH �Q �QþQ �H �QþQ �Q �H� Q �Qð Þ:Hf gI½ �
þ 3
UH:Q�Q:Hð Þ þ 3
R�r�Q: r�Qð ÞT � L2
L1r� �Qð Þ � r�Qð ÞT
� �
ð25Þ
594

the director balance equation in the L-E theory (Leslie1979) are
tt ¼ pd� @fn�@rn
�T � rnþ a1A : nnnnþ a2nNþ a3Nn
þ a4Aþ a5nn � Aþ a6A � nn0 ¼ Ce þ Cv
ð29Þ
Ce¼�n� @fn@n�r� @fn
@rnð Þ
� �;Cv¼�n� c1Nþc2A:nð Þ
ð30Þ
c1 ¼ a3 � a2; c2 ¼ a6 � a5 ð31Þ
where fn is the Frank long range energy density, given interms of the following splay (K11), twist (K22), and bend(K33) modes:
2fn ¼ K11 r � nð Þ2 þ K22 n � r � nð Þ2 þ K33 n�r� nj j2
ð32Þ
A is the rate of deformation tensor, N is the Jaumannderivative of the director n:
N ¼ _nn� n �W ð33Þ
{ai}, i=1,6 are the six Leslie viscosities coefficients,where only five of these are independent due to theParodi’s relation (Chandrasekhar 1992):
a6 � a5 ¼ a2 þ a3 ð34Þ
In this theory the reactive parameter k that controlsflow-alignment is given by
k ¼ � c2c1¼ � a2 þ a3
a3 � a2ð35Þ
As mentioned above the characteristic flow behaviourof a nematic liquid crystal depends only the sign andmagnitude of the reactive parameter or equivalently onthe Leslie viscosity coefficients a2 and a3. When shearinga nematic liquid crystal two different types of flow be-haviour are possible, depending on the signs of a2 anda3. For disk-like molecules, a3 is always positive, while a2can be positive for flow alignment systems (k<)1) ornegative for non-alignment systems (Carlsson 1982)()1<k<0). The flow-alignment angle is known as theLeslie angle hal, and is given by
cos 2hal ¼1
kð36Þ
For DNLCs the flow-alignment angle exists fork<)1. As seen from Eq. (36) for shear-aligning discoticsflow tends to align the average molecular unit normalsalong the velocity gradient direction.
We consider a flow-alignment DNLC withk=)1.315. In Cartesian component form, the director iswritten as (Fig. 2b)
nx ¼ cos hcos/
ny ¼ sinh
nz ¼ coshsin/
ð37Þ
where h is the tilt angle and / is the twist angle. Inplane orientation corresponds to /=0, and out-of-plane orientation corresponds to / „ 0. The velocitygradient for shear can be assumed uniform across thesample:
vx ¼ _ccy; vy ¼ 0; vz ¼ 0 ð38Þ
Replacing the director and velocity fields intoEqs. (29) in the angular momentum balance Eq. (30),neglecting Frank elasticity, the following coupled non-linear differential equations result (Leslie 1979):
ða3 � a2Þdhdtþ _ccða3cos2h� a2sin
2hÞcos/ ¼ 0 ð39aÞ
ða3 � a2Þcoshd/dt� _cca2sinhsin/ ¼ 0 ð39bÞ
Figure 3 shows the phase plane trajectories in the h–/plane for k=)1.315, obtained by solving Eqs. (39a and39b). The stable (S) sink nodes correspond to the LesliehL angle, and the unstable sink sources (U) to )hL, while
Fig. 2a,b Definition of the flow geometry and coordinates systemfor simple shear flow: a the lower plate is at rest and the upper platemoves in the x- direction with a constant velocity V. H is the gapseparation; b Cartesian coordinate system with x the flow direction,y the velocity gradient direction and z the vorticity axis. Thedirector n is defined by the tilt angle h and the twist angle /
595

the vorticity direction (z-axis) is an unstable saddlepoint. The shear stress history along characteristic phaseplane trajectories can then be efficiently classified intodistinctive classes and compared with experimental data.The shear stress for the non-planar Leslie-Ericksentheory s is given by
s ¼ @vx@yða1sin2hcos2h cos2 /þ ða5 � a2Þ
2sin2h
þ ða3 þ a6Þ2
cos2h cos2 /þ a42Þ
� @/@t
a2sinhsin/coshþ @h@tða3cos2h� a2sin
2hÞ
ð40Þ
Replacing the time derivatives of the twist and tiltangle given in Eqs. (39a and 39b ) into Eq. (40) we findthe following shear stress surface equation:
s ¼ @vx@yða1sin2hcos2h cos2 /þ ða5 � a2Þ
2sin2h
þ ða3 þ a6Þ2
cos2h cos2 /þ a42Þ
� @vx@y
a2 sin h sin/cos h a3 � a2ð Þ a2sinhsin/cosh
þ @vx@y
a2 sin2 h� a3 cos2 h
� �cos/
a3 � a2ða3cos2h� a2sin
2hÞ
ð41Þ
Fig. 3 Phase plane indicatingthe stable and unstable flow-alignment positions of a flow-aligning nematic discotic liquidcrystal, in a steady shearingflow for k=)1.315
Fig. 4 Dimensionless shearstress surface as a function oftilt h and twist / angles.Moving along the tilt angle axisat /=0 a series of maximaoccurs at h=±mp/4(m=1,3,5,...) and a series ofminima at h=±mp/2(m=0,1,2,...); the in-planeshear stress periodicity is indi-cated by k0. Moving along thetilt angle axis at /=p/2 a seriesof maxima occurs at h=±mp(m=0,1,...) and a series ofminima at h=±mp/2(m=1,3,5); the out-of-planeshear stress periodicity is indi-cated by kp/2
596
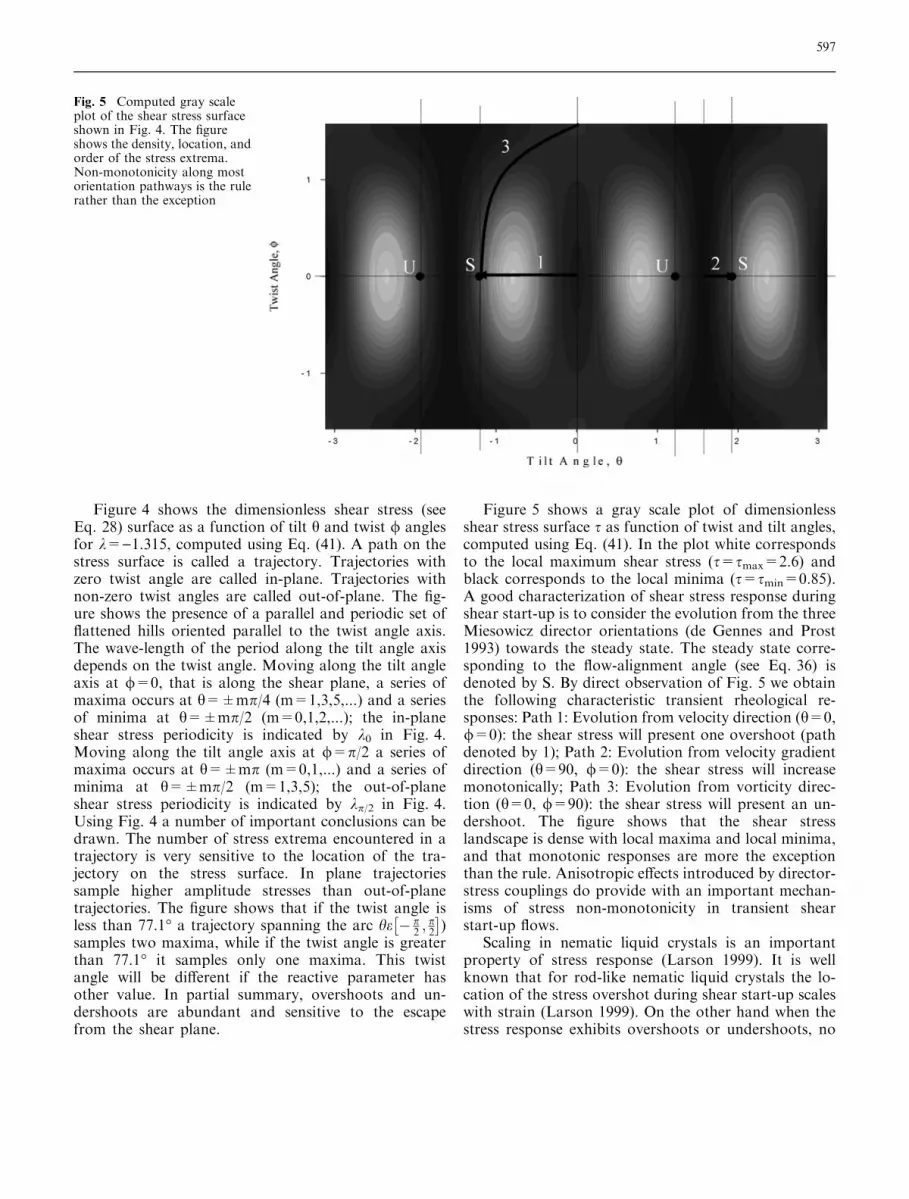
Figure 4 shows the dimensionless shear stress (seeEq. 28) surface as a function of tilt h and twist / anglesfor k=)1.315, computed using Eq. (41). A path on thestress surface is called a trajectory. Trajectories withzero twist angle are called in-plane. Trajectories withnon-zero twist angles are called out-of-plane. The fig-ure shows the presence of a parallel and periodic set offlattened hills oriented parallel to the twist angle axis.The wave-length of the period along the tilt angle axisdepends on the twist angle. Moving along the tilt angleaxis at /=0, that is along the shear plane, a series ofmaxima occurs at h=±mp/4 (m=1,3,5,...) and a seriesof minima at h=±mp/2 (m=0,1,2,...); the in-planeshear stress periodicity is indicated by k0 in Fig. 4.Moving along the tilt angle axis at /=p/2 a series ofmaxima occurs at h=±mp (m=0,1,...) and a series ofminima at h=±mp/2 (m=1,3,5); the out-of-planeshear stress periodicity is indicated by kp/2 in Fig. 4.Using Fig. 4 a number of important conclusions can bedrawn. The number of stress extrema encountered in atrajectory is very sensitive to the location of the tra-jectory on the stress surface. In plane trajectoriessample higher amplitude stresses than out-of-planetrajectories. The figure shows that if the twist angle isless than 77.1� a trajectory spanning the arc he � p
2 ;p2
� �)
samples two maxima, while if the twist angle is greaterthan 77.1� it samples only one maxima. This twistangle will be different if the reactive parameter hasother value. In partial summary, overshoots and un-dershoots are abundant and sensitive to the escapefrom the shear plane.
Figure 5 shows a gray scale plot of dimensionlessshear stress surface s as function of twist and tilt angles,computed using Eq. (41). In the plot white correspondsto the local maximum shear stress (s=smax=2.6) andblack corresponds to the local minima (s=smin=0.85).A good characterization of shear stress response duringshear start-up is to consider the evolution from the threeMiesowicz director orientations (de Gennes and Prost1993) towards the steady state. The steady state corre-sponding to the flow-alignment angle (see Eq. 36) isdenoted by S. By direct observation of Fig. 5 we obtainthe following characteristic transient rheological re-sponses: Path 1: Evolution from velocity direction (h=0,/=0): the shear stress will present one overshoot (pathdenoted by 1); Path 2: Evolution from velocity gradientdirection (h=90, /=0): the shear stress will increasemonotonically; Path 3: Evolution from vorticity direc-tion (h=0, /=90): the shear stress will present an un-dershoot. The figure shows that the shear stresslandscape is dense with local maxima and local minima,and that monotonic responses are more the exceptionthan the rule. Anisotropic effects introduced by director-stress couplings do provide with an important mechan-isms of stress non-monotonicity in transient shearstart-up flows.
Scaling in nematic liquid crystals is an importantproperty of stress response (Larson 1999). It is wellknown that for rod-like nematic liquid crystals the lo-cation of the stress overshot during shear start-up scaleswith strain (Larson 1999). On the other hand when thestress response exhibits overshoots or undershoots, no
Fig. 5 Computed gray scaleplot of the shear stress surfaceshown in Fig. 4. The figureshows the density, location, andorder of the stress extrema.Non-monotonicity along mostorientation pathways is the rulerather than the exception
597

amplitude scaling has been proposed. Here we proposeto scale the amplitude of the stress by
X ¼ W�Wmax
Wmaxð42aÞ
W¼ s��ssssss
ð42bÞ
where s* is the dimensionless shear stress and sss is thedimensionless shear stress at the steady state (in somecases Ymax is replaced by Ymin).
Numerical methods
The model Eq. (15) is a set of six coupled non-linearparabolic partial differential equations. The equationsare solved using Galerkin Finite Elements for spatialdiscretization and a forth order Runge-Kutta timeadaptive method. Convergence and mesh-independencewere established in all cases using standard methods.Spatial discretization was judiciously selected taking intoaccount the length scale of our model.
The Landau-de Gennes model for nematic liquidcrystals has an external length scale le and an internallength scale li as follows:
‘e ¼ H ; ‘i ¼ffiffiffiffiffiffiffiffiffiffiL1
ckT �
r; ‘e >> ‘i ð43Þ
The external se and internal si time scales of modelare ordered as follows:
se ¼ckT �H2
2DrL1; si ¼
1
Dr; se >> si ð44Þ
The external time scale describes slow scale orienta-tion variations and the internal length scale describesfast scale order parameter variations, such as in a defectcore. The relation between the time scales and the di-mensionless numbers are
Er ¼ _ccse R ¼ 6sesi
ð45Þ
and orientation-dominated rheology occurs when R �Er.
We consider the following three anchoring condi-tions:
1. The director n is fixed along the flow direction (BC1):
n1 ¼ ðnx; ny ; nzÞ ¼ ð1; 0; 0Þ ð46Þ
2. The director n is fixed along the velocity gradientdirection (BC2):
n2 ¼ ðnx; ny ; nzÞ ¼ ð0; 1; 0Þ ð47Þ
3. The director n is fixed along the vorticity direction(BC3):
n3 ¼ ðnx; ny ; nzÞ ¼ ð0; 0; 1Þ ð48Þ
The relation between the director components andspherical coordinates are given by Eq. (37) (Fig. 2b).
In plane orientation corresponds to /=0, and out-of-plane orientation corresponds to / „ 0. At the boundingsurfaces the discotics are uniaxial (P=0) at equilibriumS=Seq:
Seq ¼1
4þ 3
4
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� 8
3U
rð49Þ
Qs y� ¼ 0ð Þ ¼ Qs y� ¼ 1ð Þ ¼ Seq nsns �I
3
� �ð50Þ
The initial state is assumed to be uniaxial and atequilibrium. The orientation of molecules at t=0 is as-sumed to be parallel to the corresponding orientation ns,with small thermal fluctuations imposed by introducinginfinitesimally small Gaussian noise.
Q t� ¼ 0; 0 < y� < 1ð Þ ¼ Seq nInI �I
3
� �ð51Þ
We assume that the flow field is known:
V ¼ y�V; 0; 0ð Þ ð52Þ
The simulation parameters are: U=4, b=)1.1,m*1=1, m*2=)1, m*4=6 (Grecov and Rey 2002), R=105.
Numerical results and discussion
We next discuss the numerical results for two re-presentative sets of initial conditions: in plane orienta-tion (/=0) and out-of plane orientation (/ „ 0).
In plane orientation
Case (a): Initial orientation: velocity direction (h=0�,/=0�); director boundary conditions: BC1
Figure 6a shows the tilt orientation angle h at the mid-plane (y=0.5) as function of strain c=ct, and Fig. 6bshows the transient evolution of the shear stress s asfunction of strain for several Ericksen numbers. Thevertical dotted line corresponds to strains at with thestress is at a maximum. For Ep=10 elasticity is sig-nificant (Grecov and Rey 2002), the flow-alignment an-gle (hal=)69.78�) is not reached, the orientation angle isless than 45�, and a monotonically increase for the shear
598

stress is observed. For higher Er numbers, flow dom-inates, the director at the midplane reaches the flowalignment angles, and an overshoot is predicted. Thestrain (c= _cct) where the overshoot occurs is 1.4 units andcorresponds to the orientation angle in the bulk(y*=0.5) of 45� (like L-E theory predicts). The steady
state is achieved in approximately 10 units strain. Fig-ure 6c shows the corresponding scaled shear stress W asfunction of strain c= _cct. We can see that for a wide rangeof Ericksen numbers the curves collapse into one curve.Thus stress amplitude is also scalable in the slow-flow(De � 1) regime.
Figure 7a shows the tilt angle in the gap for Er=10,for three values of strain: 0.5, 1.4 (corresponding to theovershoot) and 15 (corresponding to the steady state).Due to the low value of Er the tilt angle is not equal tothe flow alignment angle. Fig. 7b shows the tilt angle inthe gap for Er=800 for three values of the strain: 0.5,1.4 (corresponding to the overshoot) and 15 (corre-sponding to the steady state). Due to the large value ofEr the tilt angle is equal to the flow alignment angle. Forthe other initial conditions and boundary conditions wehave the same microstructure (two boundary layers andin the bulk the tilt angle equal to the flow alignment
Fig. 6 a Tilt orientation angle h at the mid-plane (y=0.5) asfunction of strain c= _cct, for initial orientation along the velocitydirection (h=0, /=0) and BC1 boundary conditions.b Corresponding transient evolution of the shear stress s asfunction of strain. c Corresponding scaled shear stress W asfunction of strain c= _cct
Fig. 7a,b Tilt orientation angle at different strains as a function ofy*, for initial orientation along the velocity direction (h=0, /=0)and BC1 boundary conditions: a Er=10; b Er=800
599

Fig. 8 a Tilt orientation angle h at y*=0.5 as a function of strainc.The profiles corresponds to the flow aligning system for boundaryconditions BC1 and initial conditions at 60� from the flowdirection. b Dimensionless shear stress as a function of strain, fordifferent Ericksen numbers. The vertical dotted lines correspond tostrains at with the stress is at a maximum. For this initial state thedirector goes through ±p/4 as it evolves towards steady state. Twostress overshoots of increasing amplitude are thus observed. c Thescaled shear stress W as a function of strain c, for different Ericksennumbers. Amplitude and strain scaling of multiple overshoots ispredicted
Fig. 9 a The orientation tilt angle h at the midplane (y*=0.5) asa function of the strain c. The profiles corresponds toboundary conditions BC2 and initial conditions along thevelocity gradient. b Corresponding evolution of the dimensionlessshear stress with strain, for different Ericksen numbers. For thisinitial state the director does not go through ±p/4 as it evolvestowards steady state. No stress overshoots are thus observed. cThe scaled shear stress vs the strain for different Ericksennumbers. Amplitude and strain scaling of monotonic decay ispredicted
600
angle), so we consider that the angle from the mid-planeis representative for the cases we have studied.
Case (b): Initial orientation: in-plane tilt (h=60 �, /=0 �); director boundary conditions: BC1
Figure 8a shows the tilt orientation angle h at the mid-plane (y=0.5) as function of strain c= _cct, and Fig. 8bshows the transient evolution of the shear stress s asfunction of strain for several Ericksen numbers. Thevertical dotted lines correspond to strains at with thestress is at a maximum. For this initial state the directorgoes through ±p/4 as it evolves towards steady state.Two stress overshoots of increasing amplitude are thusobserved. The amplitude of the overshoots and under-shoot increase with Er. The strain for the first overshootis c=0.8 and for the second 2.8. The steady state isachieved at c[10. Figure 8c shows the correspondingscaled stress W as function of strain c. Amplitude andstrain scaling of multiple overshoots is predicted.
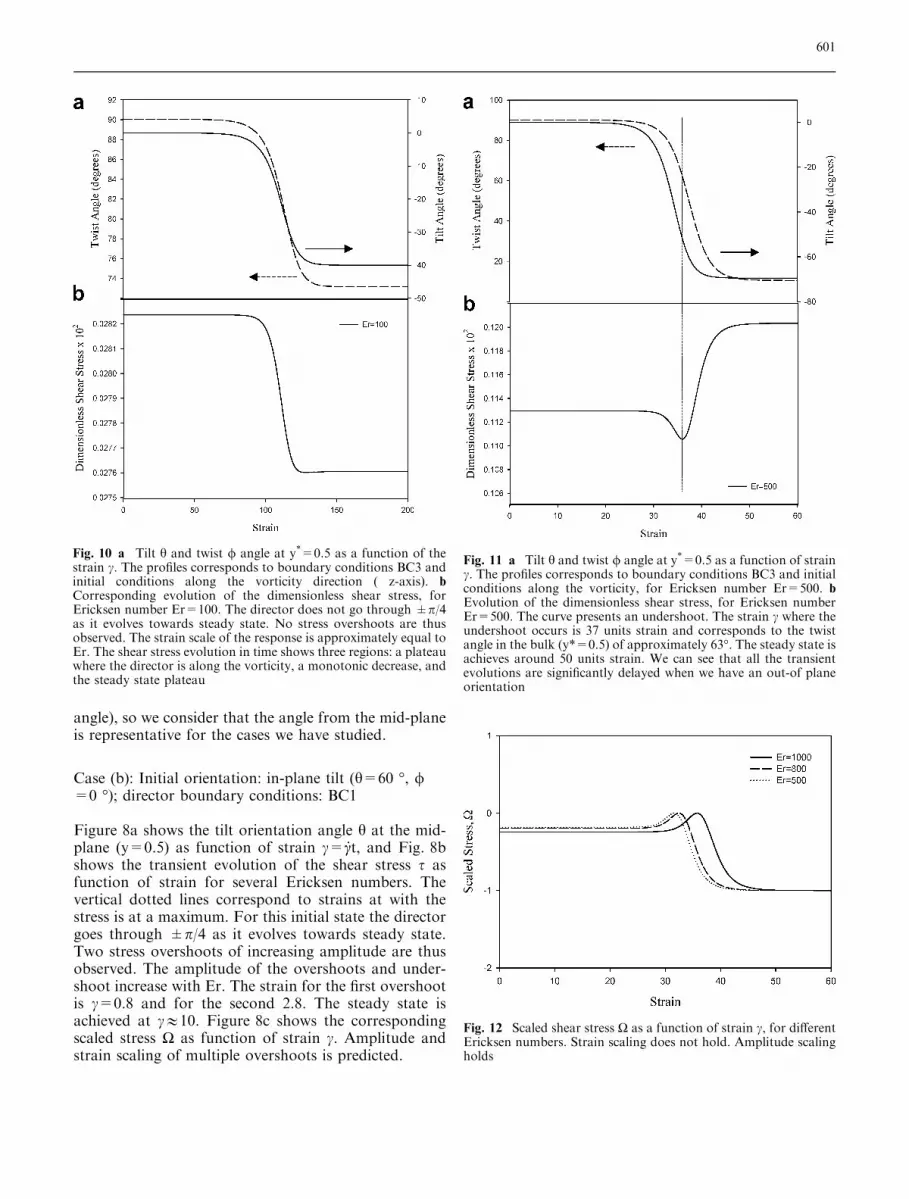
Fig. 10 a Tilt h and twist / angle at y*=0.5 as a function of thestrain c. The profiles corresponds to boundary conditions BC3 andinitial conditions along the vorticity direction ( z-axis). bCorresponding evolution of the dimensionless shear stress, forEricksen number Er=100. The director does not go through ±p/4as it evolves towards steady state. No stress overshoots are thusobserved. The strain scale of the response is approximately equal toEr. The shear stress evolution in time shows three regions: a plateauwhere the director is along the vorticity, a monotonic decrease, andthe steady state plateau
Fig. 11 a Tilt h and twist / angle at y*=0.5 as a function of strainc. The profiles corresponds to boundary conditions BC3 and initialconditions along the vorticity, for Ericksen number Er=500. bEvolution of the dimensionless shear stress, for Ericksen numberEr=500. The curve presents an undershoot. The strain c where theundershoot occurs is 37 units strain and corresponds to the twistangle in the bulk (y*=0.5) of approximately 63�. The steady state isachieves around 50 units strain. We can see that all the transientevolutions are significantly delayed when we have an out-of planeorientation
Fig. 12 Scaled shear stress W as a function of strain c, for differentEricksen numbers. Strain scaling does not hold. Amplitude scalingholds
601

Case (c): Initial orientation: velocity gradient (h=90�, /=0�); director boundary conditions: BC2 (Eq. 47)
Figure 9a shows the tilt orientation angle h at the mid-plane (y=0.5) as function of strain c= _cct, and Fig. 9b
shows the transient evolution of the shear stress s asfunction of strain for several Ericksen numbers. For thisinitial state the director does not go through ±p/4 as itevolves towards steady state. No stress overshoots arethus observed. Figure 9c shows the corresponding scaledstress W as function of strain c. Scaling of monotonicdecay is predicted.
In partial summary, for in-plane shear start-up, mul-tiple overshoots, single overshoot, or monotonic shearstress response to start-up flow is predicted. The responseis scaled by using the stress maxima and steady state va-lues. Steady states are achieved in less than 10 strain units.
Out of plane orientation
Case (d): Initial orientation: vorticity (h=0�, /=90�);director boundary conditions: BC3 (Eq. 48)
Figure 10a shows the tilt orientation angle h and thetwist angle / at the mid-plane (y=0.5) as function ofstrain c=ct, and Fig. 10b shows the transient evolutionof the shear stress s as function of strain for Er=100.For this initial state the director does not go through±p/4 as it evolves towards steady state. No stressovershoots are thus observed. The strain scale of theresponse is approximately Er. The shear stress evolutionin time shows three regions: a plateau where the directoris along the vorticity, a monotonic decrease, and thesteady state plateau. Figure 11a,b shows the corre-sponding plots for Er=500. For higher Er we have anundershoot followed by the steady state. The strain cwhere the overshoot occurs is 37 units and correspondsto the twist angle in the bulk (y*=0.5) of approximately63�. The steady state is achieves around 50 units strain.We can see that all the transient evolutions are sig-nificantly delayed when we have an out-of plane or-ientation (Van Horn and Winter 2000). Figure 12 showsthe scaled shear stress W as a function of the strain c, forseveral Ericksen numbers. Out-of-plane responsesclearly do not scale with strain.
Case (e): Initial orientation: out-of-plane (h=10�, /=85�); director boundary conditions: BC3 (Eq. 48)
Figure 13a shows the tilt orientation angle h and thetwist angle / at the mid-plane (y=0.5) as function ofstrain c=ct, and Fig. 13b shows the transient evolutionof the shear stress s as function of strain for E=500. Thestress shows an overshoot followed by an undershoot.The overshoot occurs at 1.8 unit strains and for theundershoot at 7.5, and corresponds to the tilt-twist an-gles in the bulk (y*=0.5) of around (0, 85�) and ()38�,68�) respectively. The steady state is achieved around 25units strain. Figure 13c shows the scaled shear stress
Fig. 13 a Tilt h and twist / angle at y*=0.5 as a function of strainc. The profiles corresponds to the boundary conditions BC3 andinitial conditions are: /=85� and h=10�. b Evolution of thedimensionless shear stress s with strain c, for Ericksen numberEr=500. The stress shows an overshoot followed by an under-shoot. The overshoot occurs at 1.8 strains and for the undershootat 7.5, and corresponds to the tilt-twist angles in the bulk (y*=0.5)of around (0, 85�) and ()38�, 68�), respectively. The steady state isachieved around 25 units strain. c Scaled shear stress W as afunction of strain c, for different Ericksen numbers. Amplitude andstrain scaling are not observed
602
function of the strain, for several Er numbers. Ampli-tude and strain scaling are not observed.
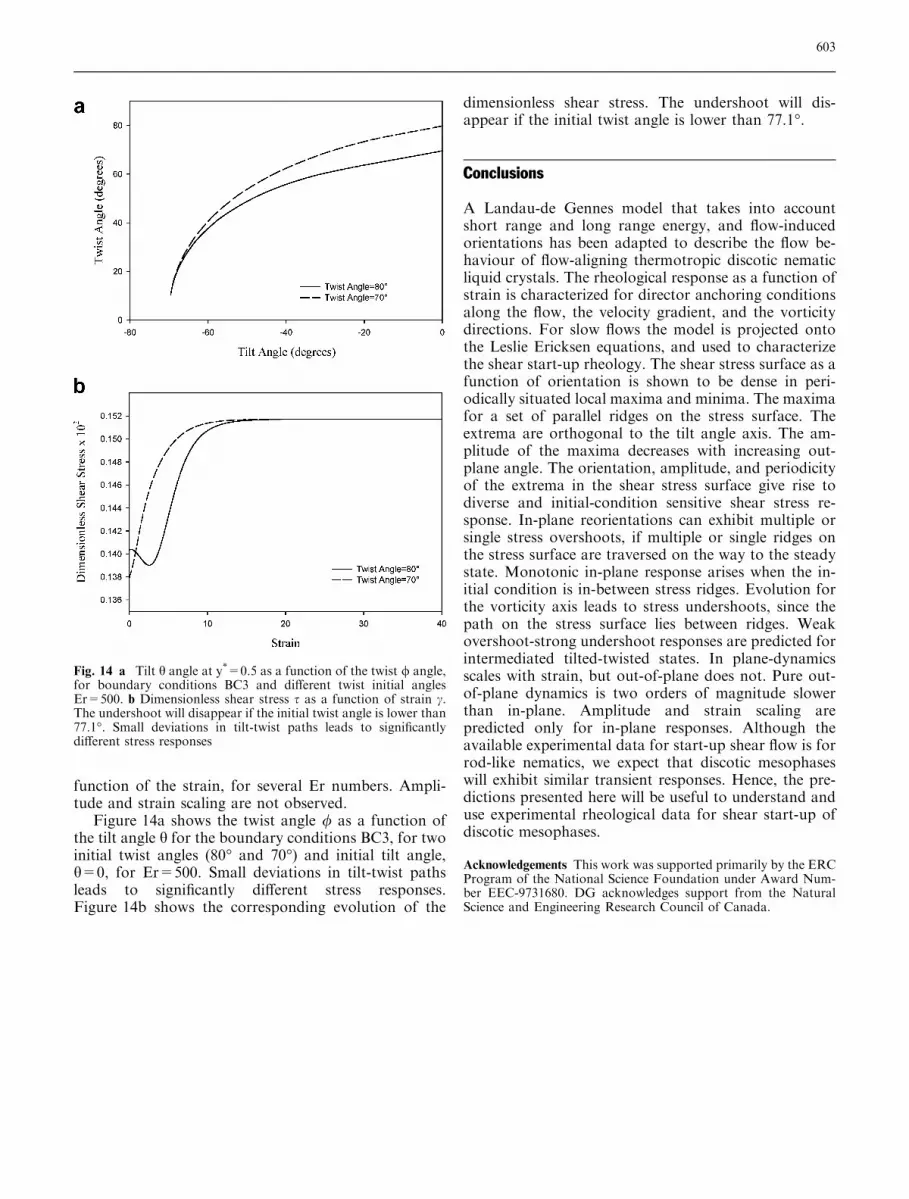
Figure 14a shows the twist angle / as a function ofthe tilt angle h for the boundary conditions BC3, for twoinitial twist angles (80� and 70�) and initial tilt angle,h=0, for Er=500. Small deviations in tilt-twist pathsleads to significantly different stress responses.Figure 14b shows the corresponding evolution of the
dimensionless shear stress. The undershoot will dis-appear if the initial twist angle is lower than 77.1�.
Conclusions
A Landau-de Gennes model that takes into accountshort range and long range energy, and flow-inducedorientations has been adapted to describe the flow be-haviour of flow-aligning thermotropic discotic nematicliquid crystals. The rheological response as a function ofstrain is characterized for director anchoring conditionsalong the flow, the velocity gradient, and the vorticitydirections. For slow flows the model is projected ontothe Leslie Ericksen equations, and used to characterizethe shear start-up rheology. The shear stress surface as afunction of orientation is shown to be dense in peri-odically situated local maxima and minima. The maximafor a set of parallel ridges on the stress surface. Theextrema are orthogonal to the tilt angle axis. The am-plitude of the maxima decreases with increasing out-plane angle. The orientation, amplitude, and periodicityof the extrema in the shear stress surface give rise todiverse and initial-condition sensitive shear stress re-sponse. In-plane reorientations can exhibit multiple orsingle stress overshoots, if multiple or single ridges onthe stress surface are traversed on the way to the steadystate. Monotonic in-plane response arises when the in-itial condition is in-between stress ridges. Evolution forthe vorticity axis leads to stress undershoots, since thepath on the stress surface lies between ridges. Weakovershoot-strong undershoot responses are predicted forintermediated tilted-twisted states. In plane-dynamicsscales with strain, but out-of-plane does not. Pure out-of-plane dynamics is two orders of magnitude slowerthan in-plane. Amplitude and strain scaling arepredicted only for in-plane responses. Although theavailable experimental data for start-up shear flow is forrod-like nematics, we expect that discotic mesophaseswill exhibit similar transient responses. Hence, the pre-dictions presented here will be useful to understand anduse experimental rheological data for shear start-up ofdiscotic mesophases.
Acknowledgements This work was supported primarily by the ERCProgram of the National Science Foundation under Award Num-ber EEC-9731680. DG acknowledges support from the NaturalScience and Engineering Research Council of Canada.
Fig. 14 a Tilt h angle at y*=0.5 as a function of the twist / angle,for boundary conditions BC3 and different twist initial anglesEr=500. b Dimensionless shear stress s as a function of strain c.The undershoot will disappear if the initial twist angle is lower than77.1�. Small deviations in tilt-twist paths leads to significantlydifferent stress responses
603

References
Beekmans F, Gotsis AD, Norder B (1996)Transient and steady-state rheologicalbehavior of the thermotropic liquidcrystalline polymer Vectra B950. JRheol 40(5):947–966
Beris AN, Edwards BJ (1994) Thermo-dynamics of flowing systems. ClarendonPress, Oxford
Carlsson T (1982) The possibility of theexistence of a positive Leslie viscosity-alpha-2—proposed flow behavior ofdisk like nematic liquid-crystals. MolCryst Liq Cryst 89:57–66
Chandrasekhar FRS (1992) Liquid crystals,2nd edn. Cambridge University Press
Cogswell FN, Wissbrun KF (1996)Rheology and processing of liquidcrystals polymer melts. Polymer liquidcrystals series, Chapman & Hall,pp 86–134
de Gennes PG, Prost J (1993) The physicsof liquid crystals, 2nd edn. ClarendonPress, Oxford
Doi M, Edwards BJ (1986) The theory ofpolymer dynamics. Clarendon Press,Oxford
Dong-Feng G, Jamieson A (1994) Sheardeformation of homeotropic mono-domains: temperature dependence ofstress response for flow-aligning andtumbling nematics. J Rheol 38(3):555–571
Farhoudi Y, Rey AD (1993a) Shear flowsof nematic polymers. 1. Orientingmodes, bifurcations, and steady-staterheological predictions. J Rheol 37:289–314
Farhoudi Y, Rey AD (1993b) Shear-flow ofnematic polymers. 2. Stationary regimesand start-up dynamics. J Non-New-tonian Fluid Mech 49:175–204
Grecov D, Rey AD (2002) Theoretical andcomputational rheology for discoticnematic liquid crystals. Mol Cryst LiqCryst 391(1):57–94
Guskey SM, Winter HH (1991) Transientshear behavior of a thermotropic liquidcrystalline polymer in nematic state. JRheol 35:1191–1207
Han WH, Rey AD (1995) Simulation andvalidation of temperature effects on thenematorheology of aligning and nonaligning liquid crystals. J Rheol39(2):301–322
Han DC, Ugaz V, Burghardt W (2001)Shear stress overshoots in flow incep-tion of semiflexible thermotropic liquidcrystalline polymers: experimental testof a parameter-free model prediction.Macromolecules 34:3642–3645
Larson RG (1996) On the relative magni-tudes of viscous, elastic and texturestresses in liquid crystalline PBG solu-tions. Rheol Acta 35:150–159
Larson RG (1999) The structure andrheology of complex fluids. OxfordUniversity Press, New York
Larson RG, Mead DW (1992) Develop-ment of orientation and texture duringshearing of liquid-crystalline polymers.Liq Cryst 12(5):751–768
Leslie FM (1979) Theory of flow phenom-ena in liquid crystals. Advances in liquidcrystals. Academic Press, New York
Marucci G, Greco F (1993) Flow behaviourof liquid crystalline polymers. AdvChem Phys 86:331–404
Mather PT, Jeon HG, Han CD, Chang S(2000) Morphological and rheologicalresponses to shear start-up and flowreversal of thermotropic liquid-crystal-line polymers. Macromolecules33:7594–7608
Rey AD, Denn MM (2002) Dynamicalphenomena in liquid-crystalline materi-als. Annu Rev Fluid Mech 34:233–266
Singh AP, Rey AD (1998) Microstructureconstitutive equation for discotic ne-matic liquid crystalline materials. PartII. Rheological predictions. Rheol Acta37: 374–386
Singh AP, Rey AD (2000) Effect of longrange elasticity and boundary condi-tions on microstructural response ofsheared discotic mesophases. J Non-Newtonian Fluid Mech 94:87–111
Tsuji T, Rey AD (1997) Effect of long-range order on sheared liquid crystallinematerials. Part I. Compatibility betweentumbling behavior and fixed anchoring.J Non-Newtonian Fluid Mech 73:127–152
Ugaz VM, Burghardt WR, Zhou W,Kornfield J (2001) Transient molecularorientation and rheology in flow align-ing thermotropic liquid crystallinepolymers. J Rheol 45:1029–1063
Van Horn BL, Henning Winter H (2000)Dynamics of shear aligning of nematicliquid crystals monodomains. RheolActa 39:294–300
Viola GG, Bird DG (1986) Studies on thetransient shear flow behavior of liquidcrystalline polymers. J Rheol 30(3):601–628
604





























