Embed Size (px)
Citation preview

The Effects of an Enhanced Navigation Support Information Service on Maritime Traffic Risks in the Gulf of Finland
Maria Hänninena*, Arsham Mazaheria, Pentti Kujalaa, Pekka Laaksonenb, Maija Salmiovirtab
aAalto University, Department of Applied Mechanics, Espoo, Finland bJohn Nurminen Foundation, Helsinki, Finland
Abstract: The paper presents an Enhanced Navigation Support Information (ENSI) navigation service and estimates how its deployment in the Gulf of Finland would affect the number of ship collisions and groundings. ENSI navigation service transmits the ship’s electronic route plan to the Vessel Traffic Service and checks the route. In return, the service sends real-time, route-specific information to the ship such as data on the weather, ice and traffic conditions, the destination and possible disturbances on the route. The service has already been tested onboard Finnish tankers. The tanker safety services will be introduced by 2013 to all oil tankers operating in the Gulf of Finland and can then be expanded to other sea areas as well. According to the maritime traffic accident statistics from the Gulf of Finland, a sea area with increasing tanker traffic and sensitive nature, the primary cause of the majority of accidents has been human failure. Further, 40 % of the human failures had been related to the crew being uncertain of the position of the ship. In this study, the effects of implementing the ENSI service are incorporated into ship-ship collision and grounding causation probability models, and the models are applied to estimating the risk reducing effect for the estimated maritime traffic in the Gulf of Finland in 2015. The effects are modeled probabilistically by eliciting expert knowledge and experiences on testing the service. With the proposed Bayesian approach to modeling the problem, the model can be updated easily and uncertainties in the risk estimates reduced after more evidence is available later from longer and wider use of the service. Keywords: Gulf of Finland, Vessel Traffic Service, Bayesian networks, Expert elicitation 1. INTRODUCTION The Baltic Sea area, where the Gulf of Finland is located, has been categorized by IMO as a Particularly Sensitive Sea Area (PSSA) (IMO, 2005). The average of annual port calls in the Gulf of Finland is approximately 54 000 ships, out of which 6 300 are tankers (Kuronen et al., 2008). The maritime traffic in the Gulf, especially the number of tankers, is further increasing due to the economy growth of the neighboring countries and the oil harbors that Russia has been recently building in the eastern coast of the Gulf; by 2015, the expected annual oil transportation has been estimated to grow up to 260 M tons and the number of tanker calls to 8 000 (Kuronen et al., 2009). The maximum depth of 60 meters and the average depth of 37 meters makes the Gulf of Finland one of the shallowest bodies of water in the world (Kuronen et al., 2008), which has resulted in groundings to be the dominant type of ship accident in the area (Kujala et al., 2009). The complex and hard-to-navigate archipelagos and the ice typically covering the area in the winter make the navigation in the Gulf more challenging. Thus there is an increasing possibility of an oil accident with serious consequences to the vulnerable environment. The costs of oil recovery from a major oil tanker accident may reach billions of euro, let alone the long term environmental impacts on the spilled area. For instance, the cleanup efforts for the Exxon Valdez oil accident cost approximately 2.5 billion USD (Hartman et al., 1991). In the Gulf of Finland, the harsh, cold and icy weather conditions might make the cleanup process more difficult and therefore much more expensive. Thus it seems sensible to implement preventive measures to prevent the occurrences of large-scale tanker accidents. Most of the grounding accidents in the Gulf of Finland have been attributable to human error, of which more than 40% have been related to the ship’s crew being uncertain of the ship’s position (Kujala et al., 2009). As an example, a navigational error almost caused a major oil accident when a 100,000 ton crude oil tanker, Propontis, grounded in the Gulf of Finland near Gogland in February 2007. Luckily, because of the double hull, no oil was spilled to the sea. Currently, as one of the in-place preventive means, the Vessel Traffic Service (VTS) centers in Helsinki, St. Petersburg, and Tallinn are monitoring the ship movements in the areas of national and international waters within the Mandatory Ship Reporting System GOFREP. They also provide advice and information on the navigational hazards and weather conditions in the area. However, introducing new technology for proactive vessel traffic control system might support preventing a major oil accident. For example, if the VTS had been aware of Propontis’s dangerous route plan beforehand the
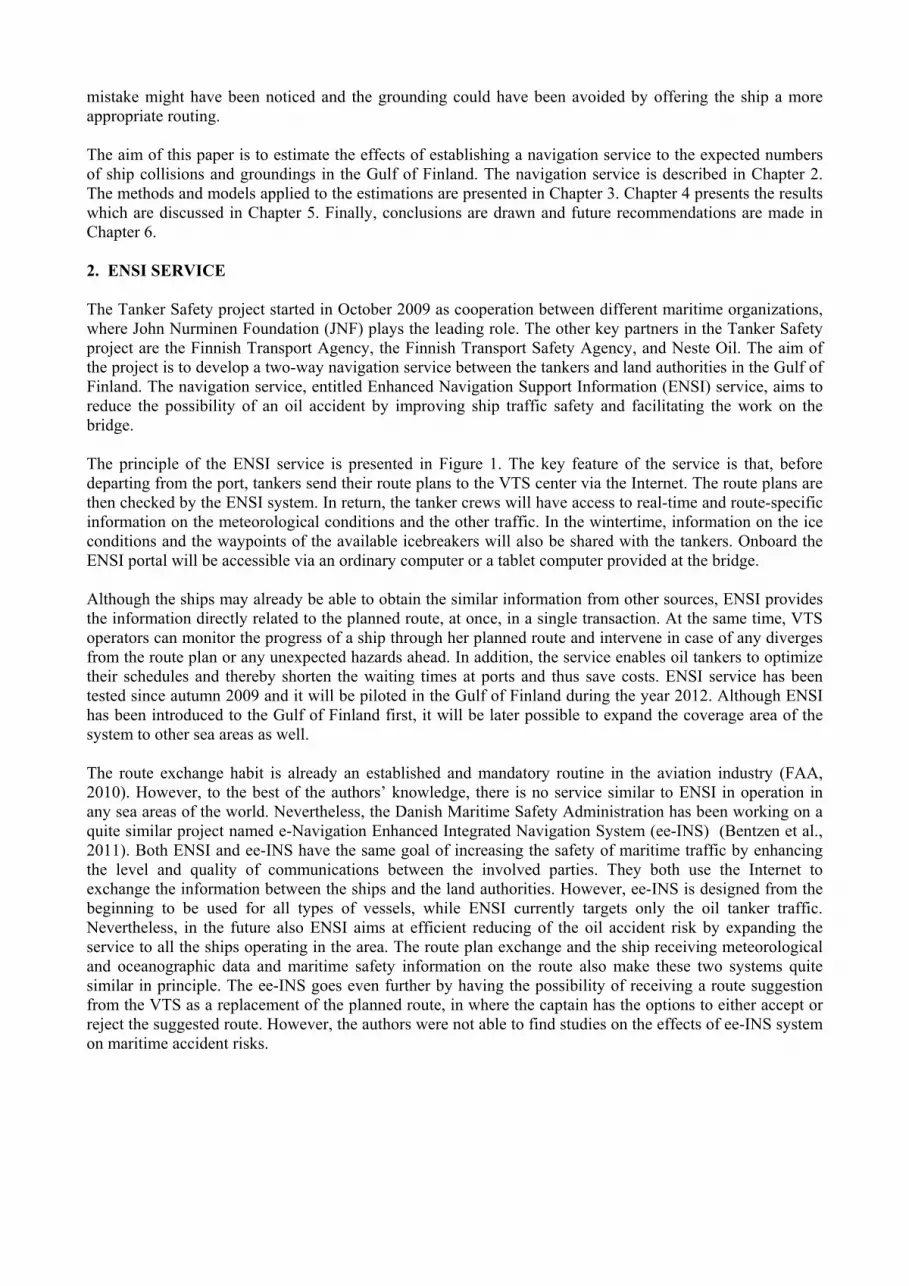
mistake might have been noticed and the grounding could have been avoided by offering the ship a more appropriate routing. The aim of this paper is to estimate the effects of establishing a navigation service to the expected numbers of ship collisions and groundings in the Gulf of Finland. The navigation service is described in Chapter 2. The methods and models applied to the estimations are presented in Chapter 3. Chapter 4 presents the results which are discussed in Chapter 5. Finally, conclusions are drawn and future recommendations are made in Chapter 6. 2. ENSI SERVICE The Tanker Safety project started in October 2009 as cooperation between different maritime organizations, where John Nurminen Foundation (JNF) plays the leading role. The other key partners in the Tanker Safety project are the Finnish Transport Agency, the Finnish Transport Safety Agency, and Neste Oil. The aim of the project is to develop a two-way navigation service between the tankers and land authorities in the Gulf of Finland. The navigation service, entitled Enhanced Navigation Support Information (ENSI) service, aims to reduce the possibility of an oil accident by improving ship traffic safety and facilitating the work on the bridge. The principle of the ENSI service is presented in Figure 1. The key feature of the service is that, before departing from the port, tankers send their route plans to the VTS center via the Internet. The route plans are then checked by the ENSI system. In return, the tanker crews will have access to real-time and route-specific information on the meteorological conditions and the other traffic. In the wintertime, information on the ice conditions and the waypoints of the available icebreakers will also be shared with the tankers. Onboard the ENSI portal will be accessible via an ordinary computer or a tablet computer provided at the bridge. Although the ships may already be able to obtain the similar information from other sources, ENSI provides the information directly related to the planned route, at once, in a single transaction. At the same time, VTS operators can monitor the progress of a ship through her planned route and intervene in case of any diverges from the route plan or any unexpected hazards ahead. In addition, the service enables oil tankers to optimize their schedules and thereby shorten the waiting times at ports and thus save costs. ENSI service has been tested since autumn 2009 and it will be piloted in the Gulf of Finland during the year 2012. Although ENSI has been introduced to the Gulf of Finland first, it will be later possible to expand the coverage area of the system to other sea areas as well. The route exchange habit is already an established and mandatory routine in the aviation industry (FAA, 2010). However, to the best of the authors’ knowledge, there is no service similar to ENSI in operation in any sea areas of the world. Nevertheless, the Danish Maritime Safety Administration has been working on a quite similar project named e-Navigation Enhanced Integrated Navigation System (ee-INS) (Bentzen et al., 2011). Both ENSI and ee-INS have the same goal of increasing the safety of maritime traffic by enhancing the level and quality of communications between the involved parties. They both use the Internet to exchange the information between the ships and the land authorities. However, ee-INS is designed from the beginning to be used for all types of vessels, while ENSI currently targets only the oil tanker traffic. Nevertheless, in the future also ENSI aims at efficient reducing of the oil accident risk by expanding the service to all the ships operating in the area. The route plan exchange and the ship receiving meteorological and oceanographic data and maritime safety information on the route also make these two systems quite similar in principle. The ee-INS goes even further by having the possibility of receiving a route suggestion from the VTS as a replacement of the planned route, in where the captain has the options to either accept or reject the suggested route. However, the authors were not able to find studies on the effects of ee-INS system on maritime accident risks.

Figure 1: ENSI system at a glance (by Jussi Tuurnala/JNF) 3. METHODS AND MODELS 3.1. Overall Approach The effects of implementing ENSI service on the expected number of tanker collisions and groundings in the Gulf of Finland in 2015 were assessed both qualitatively and quantitatively by utilizing expert knowledge. The basic assumption in the estimation and modeling was that in 2015 the ENSI service would be installed on all tankers navigating in the Gulf of Finland, but not on other types of ships. The effects for open water season were estimated both qualitatively and probabilistically. However, ice conditions were considered only qualitatively, as there yet is no quantitative model which would reliably capture the different nature of winter navigation. Additionally, experts were asked to describe how ENSI could possibly affect the consequences of collisions and groundings, if at all. A one-day workshop was organized for assessing the effects. At the beginning of the workshop, the authors explained why the workshop was being organized, what the experts would be asked to do, and why the experts’ assessments were important. Also, ENSI system and the meanings of the ENSI implementation phases (levels, see Chapter 3.3.) in the questions were explained. The experts were also introduced to the frequentist and Bayesian approaches to the probability concept and to the most common heuristics and biases of expert elicitation. A brief calibration of the experts, following the technique proposed in (Simola et al., 2005), was performed in order to familiarize the experts with their possible tendencies towards biases. All experts agreed that they were participating in the workshop willingly, with being promised to remain anonymous and having the right to leave the workshop at any time without the need to provide any explanation. All of these were done in order to increase the reliability of the collected answers by providing a convenient atmosphere for the participated experts (Mishler, 1986). Open-ended questions were used for the qualitative estimation of the effects and the consequences. The experts were asked how the ENSI service would affect the number of collisions and groundings in the Gulf of Finland. This was asked separately for collisions and for groundings, and for open water season and for winter navigation. The open-ended questions were answered before going through the selection of ENSI-impacted collision and/or grounding model variables (see Chapter 3.3) in order not to steer the experts towards considering only the effects on the model variables. Each expert provided the answers to the open-ended questions individually. The applied approach to the probabilistic modeling was based on the concepts originally presented by Fujii et al. (1971, 1974) and Macduff (1974). In this approach, the number of collision or grounding accidents in a certain waterway or a waterway crossing is calculated as a product of a number of geometrical accident candidates and a so-called causation probability. The number of geometrical collision candidates denotes the number of encounters of two ships that would lead to collision unless evasive actions are taken. Similarly for groundings, it denotes the number of situations where the ship is on a grounding course and will run aground if there were no evasive actions. The number of geometrical collision or grounding candidates is calculated

based on the ship traffic and the geographical properties of the area, such as the historical ship tracks, speeds, sizes and the water depths. There are various approaches to estimating the number of geometrical collision candidates, e.g. (Pedersen, 1995, Montewka et al., 2010, Goerlandt and Kujala, 2011), and the ones of grounding, e.g. (Pedersen, 1995, Simonsen, 1997, COWI, 2008, Dorp and Merrick, 2009). The other factor, the causation probability, describes the probability of ship(s) failing to avoid the accident given a geometrical candidate situation. It is always conditional upon the model of the number of geometrical collision or grounding candidates. Causation probability has been modelled e.g. with traditional risk analysis tools such as fault trees and event trees (Pedersen, 1995, Rosqvist et al., 2002) and by utilizing Bayesian networks, e.g. (Friis-Hansen and Simonsen, 2002, DNV, 2003, Rambøll, 2006). In the probabilistic estimations of this study, it was assumed that ENSI system did not impact the number of geometrical accident candidates. Thus only the impact on the causation probabilities was under examination. 3.2. Experts Initially ten experts participated in the workshop, however two felt they did not have enough expertise and decided not to answer the questions. The remaining eight experts were all males of ages between 32 and 61 (the average age being 43.5 years). All experts had maritime working experience between 3 to 30 years. Three experts were working as VTS operators, two as active masters, one as a safety manager on land organization and one expert as a senior inspector in the Finnish Transport Agency. One participant was a maritime traffic safety researcher and well familiarized with the concepts and assessments of probabilities, while the others had no or very little knowledge on probabilities and had never assessed them before. Seven experts were Finnish with Finnish as their mother tongue and a mariner education from Finland and one expert was Polish with a Polish education. 3.3. Causation Probability Models The causation probability models of the Gulf of Finland were influence diagram models, which are generalizations of Bayesian networks for decision situation modeling; For more information on Bayesian networks or influence diagrams, see e.g. (Jensen and Nielsen, 2007). The collision causation probability model was based on a model presented by the authors in (Hänninen and Kujala, in prep.). Additionally, a weighted average of three alternative 2015 maritime traffic scenarios from (Kuronen et al., 2009) were used. The assigned weights 0.15, 0.6 and 0.25 of the “slow”, “average” and “strong” traffic growth scenario, respectively, were assessed by an author of (Kuronen et al., 2009)). The core of the grounding causation probability model (Figure 2) was based on DNV’s grounding model for passenger ships (DNV, 2003). However, the consequence part of the model was omitted, and the rest of the model was updated based on the literature that had more specifically investigated the oil tanker grounding accident modeling (Amrozowicz et al., 1997, Amrozowicz, 1996, Eide et al., 2007a, Eide et al., 2007b). The human element part of the grounding model was almost identical to the collision model with small differences related to grounding accidents inspired by (Lützhöft and Nyce, 2006, Brown and Haugene, 1998). The implementation of ENSI was modeled with a decision variable with alternative states “not implemented”, “ENSI 1 implemented” and “ENSI 2 implemented”, here called different levels of ENSI. ENSI 1 denoted the situation where the tankers send their route plans to the VTS center and receive information on their ENSI tablets in return, but do not receive the route plans of the other tankers. In ENSI 2 the service was otherwise similar to ENSI 1 except the route plans of other tanker traffic were also shown on the tablets. In addition to the decision variable, a random variable “ENSI tablet function” was added to the models for describing the reliability of ENSI tablet. As the applied models had a vast number of variables, it was not practically possible to ask the effects of implementing ENSI on all of them. Instead, a set of model variables to be directly impacted by the implementation of ENSI was identified first. Before the workshop, two maritime traffic safety researchers with seafarer backgrounds were asked to choose the model variables which might be directly affected by the service, that is, to which there should be a link from the ENSI decision variable (and/or from the ENSI tablet function variable) in the causation probability model(s). From their initial selections, after discussing the selections with them, the authors further eliminated some variables. The remaining variables were then presented to the experts in the workshop, and based on discussion a few more of them were excluded from

the probability assessments. The remaining variables of the causation probability models to be directly influenced by ENSI service implementation are listed in Table 1. For all the variables in Table 1, the assessments of the experts were used, except for “ENSI tablet function” whose reliability was based on the reliability of the AIS in (Hänninen and Kujala, in prep.). For the collision model variables not listed in Table 1, the probability tables were based on (Hänninen and Kujala, in prep.). The other probability parameters of the grounding model were based on (DNV, 2003) and (Amrozowicz, 1996). The influence diagrams were constructed and run using the software HUGINTM Researcher v. 7.1 (Madsen et al., 2005). 3.4. Elicitation Technique The probability elicitation technique that was used in this study was created and applied by van der Gaag et al. (2002) for assessing several thousand conditional probabilities of an esophagus cancer Bayesian network. According to van der Gaag et al., the method is quite fast and useful for eliciting a large number of conditional probabilities from the domain experts in reasonable time, compared with other available methods such as the ones used by Dorp and Merrick (2009) and Uluscu et al. (2009).
Figure 2: The grounding causation probability influence diagram

Table 1: Collision and grounding model variables directly influenced by ENSI implementation. In the collision model, there were two copies of the variables marked with an asterisk, one for each ship
In this method, the conditional probability to be assessed was presented to the experts using a fragment of text, instead of showing only a mathematical notation (Figure 3). By presenting a text that was stated in terms of likelihood rather than frequency, the minds of the experts were eased for assessing conditional probabilities for which the conditioning contexts are rare. For expressing their expert opinion on each conditional probability, the experts were given a vertical scale with seven verbal anchors. Each verbal anchor was also accompanied by a number in a scale of 100 to give the experts the choice of using the percentages (Figure 3). However, the experts were specifically asked not to mark the scales but to write their expert opinion in the form of percentage or probability, as the scales were provided only for helping them to visualize the complete probability range and to compare the common verbal expression with probability values. However, most of the experts used the anchors to state their opinions, and only a few occasionally used numbers in the form of either probability or percentage. The fragmented texts were grouped in a way that all the conditional probabilities for a single node of the network could be taken into consideration simultaneously. Therefore, the questions from the same group were printed together on one side papers in order to make the experts able to spread the papers on the table to
Variable name Model where present
Description States
Checking frequency Grounding The frequency of the OOW checking the position of the ship by the help of charts and radar/AIS
Frequently Occasionally
Communication with other vessel
Collision Whether the OOW receives a warning from the ship on a collision course
Yes No
Distraction level Grounding Total level of distractions Low Moderate High
Duties * Collision & Grounding
The amount of the OOW’s duties Coll.: Normal High Extreme
Ground.: World Radar Other
ENSI detection * Collision & Grounding
Whether the OOW detects the danger on the ENSI tablet
Yes No
ENSI tablet function * Collision & Grounding
Whether the ENSI tablet is functioning Functioning Not functioning Not installed
Looking frequency Grounding The frequency of the OOW scanning the sea for possible heading towards a shoal
Frequently Occasionally
Officer no. 2 vigilance * Collision & Grounding
Whether other navigator is present, discovers the danger and is able to correct the course
Able to correct Not able to correct Not present
Other distractions * Collision & Grounding
Whether the OOW is exposed to many or few distractions taking attention away from his dedicated tasks as a navigator
Few Many
Other internal vigilance * Collision & Grounding
Whether there is another person on the bridge, e.g. a lookout, who is able to correct the course by informing the OOW so that the necessary action is carried out in time
Able to correct Not able to correct No other vigilance
Passage planning Grounding The quality of the passage planning Standard Poor
Stress level * Collision & Grounding
Distribution of OOW’s stress level Standard High
Traffic intensity Grounding Traffic intensity in the vicinity of the ship affecting the ability of proper maneuvering to avoid grounding
Low Medium High
VTS vigilance Collision & Grounding
Whether VTS operator observes the danger and warns the OOW so that (s)he can act in time
Yes No

be able to see all the papers with one glance. For all the conditional probabilities, the questions regarding the different levels of ENSI were also presented side by side as shown in Figure 3. For binomial variables, only one state per conditioning context was asked. On the other hand, for variables with more than two states, the probabilities of all states were asked as it was assumed the experts would not necessarily take into consideration that the probabilities of alternative states with similar conditioning contexts should sum up to 1.0. The experts assessed the probabilities individually and each of them produced separate probability tables for the variables. In order to have a single probability table for each model variable, the individual answers of the experts were combined. This was carried out with linear opinion pooling using equal weights between the experts, as it has been described as a simple but still a rather robust way to combine multiple expert judgments into one (O'Hagan, 2006). For the variables “Officer no 2. vigilance” and “Traffic Intensity”, one expert did not provide a numerical estimate so for those variables the opinions of only seven experts were used. Unfortunately, the probabilities related to “Other internal vigilance” were mistakenly excluded from the set of variables assessed in the workshop, as were the questions for “other” duties of the grounding model. However, these questions were sent to the experts after the workshop and two of them provided their answers. Those were then linearly pooled and inserted into the model(s). 5. RESULTS 5.1. Open-ended Questions For the effects of the ENSI service on open water season collisions, the answers varied from hardly any impact to a noticeably mitigating effect on the number of ship collisions. For open water season, no negative effects were mentioned. Four experts mentioned the possibility of VTS detecting the danger, for example a collision in crossing routes and the ship being “off track”. There were also single mentions of weather information helping ships for preparing for the conditions and an increased situational awareness of the navigators due to having all necessary information on a single display. However, three experts mentioned that the ships may not necessarily use the service or follow the preplanned route. For collisions in ice, again the magnitude of the effects varied from a noticeable decrease to a possibility of increasing in the number of collisions. Four experts mentioned that the icebreaker waypoints available to ships have a positive effect. However, two experts mentioned that ships cannot follow the preplanned routes due to moving ice. According to one expert, this might even increase the collision probability. There was also a single mention on the majority of collisions occurring in convoys led by an icebreaker, where ENSI service would not help.
Figure 3: An example of the text and the scale used for probability elicitation, following the approach in (van der Gaag et al., 2002)

Table 2: The causation probability values for the Gulf of Finland traffic in 2015 (open water season) derived with the influence diagram models
All but one expert saw ENSI service having a reducing effect on the number of groundings in open water. However, one expert commented that ECDIS is the most important navigational aid and too much information might be distracting. He thought that the younger “computer game generation” might see the system as a “toy” which could increase the grounding probability. All others indicated that the risk-reducing impact would be mainly related to VTS checking the route plan – two experts specifically identified a smaller chance of human errors in route planning. One expert also mentioned that with ENSI service the ship is “on rails”. For winter navigation groundings, three experts again mentioned the route plan checking. Additionally, the VTS warning the ship about ice conditions on their planned route was mentioned. Receiving information on ice conditions was mentioned by two experts, as was also the icebreaker waypoint information. The experts were more skeptical about the effects of ENSI implementation on collision or grounding consequences. Two experts mentioned a quick access to information such as the instructions for emergency situations. The possibility to plan well before how to get help quickly to each part of the route was mentioned once. Also, there was a single mention on warning other ships about an accident and forwarding the route plans to maritime rescue coordinators. Three experts clearly stated that they doubted if the implementation of the ENSI service had any impact on the consequences. 5.2. Causation Probabilities from the Influence Diagram Models Based on the influence diagram models, the values of the collision and grounding causation probabilities in the Gulf of Finland in 2015 with and without ENSI implementations are presented in Table 2. It should be noted that the values in Table 2 describe causation probability, not the number of accidents (collisions and groundings). However, as it was assumed the ENSI would have no effect on the number of the geometrical collision or grounding candidates, the magnitude of the impact on the number of accidents can be examined as the changes in the causation probability. From Table 2 it can be seen that the number of tanker collisions and groundings during open water season with ENSI 1 service in use would be respectively 6 % and 24% smaller than if ENSI was not implemented. The implementation of ENSI 2 would decrease the number of collisions by 10 %, while decreasing the number of grounding by 21 % compared with no ENSI situation. 6. DISCUSSION The answers to the open-ended questions reflected the difference in experts’ views on how the ENSI service would affect the tanker accident risks. Nevertheless, they mainly saw the service as a possible way to decrease the number of collisions and groundings. The most commonly mentioned ENSI feature was the route plan checking. When considering the results from the causation probability models (Table 2), the effect the experts elicited can be seen in quantitative form. The larger effect on the number of groundings compared with collisions seems reasonable and is aligned with the result from the qualitative questions, as the route plan checking is probably more valuable to avoiding groundings than collisions. Nonetheless, according to the model, ENSI service would also decrease the number of collisions. When comparing the implementation levels of ENSI, for groundings the level 2 would not work as well as the level although the results show a decrease in the number of groundings if ENSI 2 is implemented in comparison with no ENSI. This might be justified, as the experts believed the looking frequency and the checking frequency would be decreased when ENSI 2 system is implemented. This might describe the mentioned “video game generation” of mariners’ tendency to work more with the provided tablet when the
Causation probability type ENSI level implementation
Causation probability value
Difference compared with no ENSI
Collision Not implemented 1.08E-04 ENSI 1 1.01E-04 -6.48 % ENSI 2 9.75E-05 -9.72 %
Grounding Not implemented 3.50 E-04 ENSI 1 2.66 E-04 -24.00 % ENSI 2 2.77 E-04 -20.86 %

other traffic is visible, and thus rely on it instead of traditional, yet reliable way of navigation: looking out for any possible danger or checking the position of the ship by using different sources. For choosing the optimal choice between ENSI 1 and ENSI 2, comparing the effects on the causation probabilities of groundings and collisions is not enough, not even if the goal was to minimize the number of accidents and no other goals would be taken into account. For that, the number of geometrical collision candidates would be needed. When looking further to the consequences of these accident types, let alone the costs of the ENSI service alternatives, finding the best implementation alternative becomes even more complicated. Most of the experts only used the provided anchors to state their opinions. Thus, it may be argued that the anchors somehow contributed to biasing the experts’ answers. However, the resulted probability values should not be considered as such; one should rather examine the relative values and the differences between implementing no ENSI, ENSI 1 and ENSI 2. 7. CONCLUSION The aim of this study was to estimate the effects of establishing ENSI navigational service in the Gulf of Finland to the expected numbers of ship collisions and groundings in 2015. The estimated effects on the so-called causation probability and the answers provided by a team of maritime professionals and experts suggest that there is a possibility to decrease the number of collisions and groundings by implementing the ENSI service. Especially for groundings the service is suggested being quite efficient: one fourth of the groundings in open water season could be prevented with ENSI. One should also note that in this study only tankers were assumed to have ENSI, if any – implementing ENSI on all ships should produce even larger impact. However, the results presented in this paper are only preliminary and more analysis is needed in order to examine e.g. how the applied elicitation technique affected the results. Also, the costs of implementing the systems and the costs of the collisions and groundings should be included in the modeling for performing a full cost-benefit analysis of the problem. Nevertheless, with the proposed Bayesian approach to the quantitative modeling of the problem, the models can be updated easily and uncertainties in the results reduced after more evidence is available later from longer and wider use of the service. Acknowledgements The study was conducted as a part of “Competitive Advantage by Safety” (CAFE) and “Minimizing risks of maritime oil transport by holistic safety strategies” (MIMIC) projects. For that, the authors are grateful to the European Union - European Regional Development Fund – through the Regional Council of Päijät-Häme and the Central Baltic INTERREG IV A Programme 2007-2013, City of Kotka, Finnish Shipowners’ Association, Kotka Maritime Research Centre corporate group: Aker Arctic Technology Inc., Port of Hamina-Kotka, Kotka-Hamina Regional Development Company, Centre for Economic Development, Port of Helsinki, Kristina Cruises Ltd, Meriaura Ltd., and Transport and the Environment of Southwest Finland. The experts who participated in the workshops and in the additional assessments are gratefully thanked. M.Soc.Sc. Jenni Storgård is thanked for her expertise in determining the weights for the traffic scenarios. References Amrozowicz, M. D. (1996) The Quantitative Risk of Oil Tanker Groundings. Department of Ocean
Engineering. Massachusetts Institute of Technology. Amrozowicz, M. D., Brown, A. and Golay, M. (1997) A Probabilistic Analysis of Tanker Groundings. 7th
International Offshore and Polar Engineering Conference. Honolulu, Hawaii. Bentzen, M., Borup, O. and Christensen, T. (2011) The EfficienSea e-Navigation approach - Finding the
gap. E-Navigation. on board M/S Crown of Scandinavia, on route Copenhagen-Oslo. Brown, A. and Haugene, B. (1998) Assessing the Impact of Management and Organizational Factors on the
Risk of Tanker Grounding. 8th International Offshore and Polar Engineering Conference. COWI (2008) Risk Analysis for Sea Traffic in the Area around Bornholm. Kongens, Lyngby, Danish
Maritime Authority. DNV (2003) Formal Safety Assessment -Large Passenger ships. Eide, M. S., Endresen, O., Breivik, O., Brude, O. W., Ellingsen, I. H., Roang, K., Hauge, J. and Brett, P. O.
(2007a) Prevention of oil spill from shipping by modelling of dynamic risk. Marine Pollution Bulletin, 54, 1619-1633.

Eide, M. S., Endresen, Ø., Brett, P. O., Ervik, J. L. and Røang, K. (2007b) Intelligent ship traffic monitoring for oil spill prevention: Risk based decision support building on AIS. Marine Pollution Bulletin, 54, 145-148.
FAA (2010) Federal Aviation Administration - Pilot/Controller Glossary (P/CG). IN CLEARANCE (Ed. Friis-hansen, P. and Simonsen, B. C. (2002) GRACAT: software for grounding and collision risk analysis.
Marine Structures, 15, 383-401. Fujii, Y., Oshima, R., Yamanouchi, H. and Mizuki, N. (1974) Some Factors Affecting the Frequency of
Accidents in Marine Traffic: I- The Diameter of Evasion for Crossing Encounters, II- The probability of Stranding, III- The Effect of Darkness of the Probability of Collision and Stranding. The Journal of Navigation, 27, 239-247.
Fujii, Y. and Shiobara, R. (1971) The Analysis of Traffic Accidents. The Journal of Navigation, 24, 534-543. Goerlandt, F. and Kujala, P. (2011) Traffic simulation based ship collision probability modeling. Reliability
Engineering and System Safety, 96, 91-107. Hänninen, M. and Kujala, P. (in prep.) Impacts of variables on ship collision probability in a Bayesian belief
network model. Submitted manuscript. Hartman, B. M., Gerson, S. M., Brighton, W. D., Nicoll, J. L., Jacobson, R., Belt, R. R. and Cole, C. E.
(1991) Governments' Memorandum in Support of Agreement and Consent Decree. IN COURT, U. S. D. (Ed. District of Alaska.
IMO (2005) Revised Guidelines for the Identification and Designation of Particularly Sensitive Sea Area (PSSAs). IN IMO (Ed. Resolution A.982.
Jensen, F. V. and Nielsen, T. D. (2007) Bayesian Networks and Decision Graphs. New York, USA: Springer.
Kujala, P., Hänninen, M., Arola, T. and Ylitalo, J. (2009) Analysis of the Marine Traffic Safety in the Gulf of Finland. Reliability Engineering and System Safety 94, 1349-1357.
Kuronen, J., Helminen, R., Lehikoinen, A. and Tapaninen, U. (2008) Maritime Transportation in the Gulf of Finland in 2007 and in 2015. Turku, University of Turku.
Kuronen, J., Lehikoinen, A. and Tapaninen, U. (2009) Maritime transportation in the Gulf of Finland in 2007 and three alternative scenarios for 2015. International Association of Maritime Economists Conference (IAME). Copenhagen, Denmark.
Lützhöft, M. H. and Nyce, J. M. (2006) Piloting by heart and by chart. The Journal of Navigation, 59, 221-237.
Macduff, T. (1974) The Probability of Vessel Collisions. Ocean Industry, 9, 144-148. Madsen, A., Jensen, F., Kjärulff, U. and Lang, M. (2005) The Hugin tool for probabilistic graphical models.
International Journal of Artificial Intelligence Tools, 14, 507-544. Mishler, E. (1986) Research Interviewing: Context and Narrative. Boston: First Harvard Press. Montewka, J., Hinz, T., Kujala, P. and Matusiak, J. (2010) Probability modelling of vessel collisions.
Reliability Engineering and System Safety, 95, 573-589. O'Hagan, A. (2006) Uncertain judgements: eliciting experts' probabilities. New York: John Wiley & Sons. Pedersen, P. T. (1995) Collision and Grounding Mechanics. Proceedings of WEMT '95'. Copenhagen,
Denmark, The Danish Society of Naval Architecture and Marine Engineering. Rambøll (2006) Navigational safety in the Sound between Denmark and Sweden (Øresund). Denmark,
Rambøll Danmark A/S. Rosqvist, T., Nyman, T., Sonninen, S. and Tuominen, R. (2002) The Implementation of the VTMIS System
for the Gulf of Finland - A FSA Study. International Conference on Formal Safety Assessment. London, U.K.
Simola, K., Mengolini, A., Bolado-Lavin, R. and Gandossi, L. (2005) Training Material for Formal Expert Judgment. In directorate-general joint research centre (Ed. Petten, The Netherlands, Institute for Energy, European Commission.
Simonsen, B. C. (1997) Mechanics of Ship Grounding. Department of Naval Architecture and Offshore Engineering. Kongens Lyngby, Technical University of Denmark.
Uluscu, Ö. S., Özbas, B., Alitok, T. and Or, I. (2009) Risk analysis of the vessel traffic in the strait of Istanbul. Risk Analysis, 29, 1454-1472.
Van der Gaag, L. C., Renooij, S., Witteman, C. L. M., Aleman, B. M. P. and Taal, B. G. (2002) Probabilities for a probabilistic network: a case study in oesophageal cancer. Artificial Intelligence in Medicine, 25, 123-148
Van Dorp, J. R. V. and Merrick, J. R. W. (2009) On a risk management analysis of oil spill risk using maritime transportation system simulation. Annals of Operations Research, 1-29.





























