Embed Size (px)
Citation preview

ROBOTICA INDUSTRIALUNAB
PROFESOR: Felipe Castro Nieny
2

Temario clase N2• Lista de Correos alumnos / envío de PDF• Recepción de tareas.• Clasificación robot industrial• Tipos de articulaciones• Estructura mecánica• Trasmisiones• Reductores• Características de selección• Tarea N2
cursoBIBLIOGRAFIA
WEB
1. ROBOTICA : tercera edición, John J. Craig
2. Fundamentos de robótica Antonio Barrientos
3. Robótica Apuntes para la asignatura Ingeniería Informática Módulo optativo para Ingeniería Electrónica Juan Domingo 3 de febrero de 2001
WEB
1.-http://robotsnob.com/ (WEB y ANDROID)
1ª Generación : Repite la tarea programadasecuencialmente. No toma en cuenta las posiblesalteraciones de su entorno.
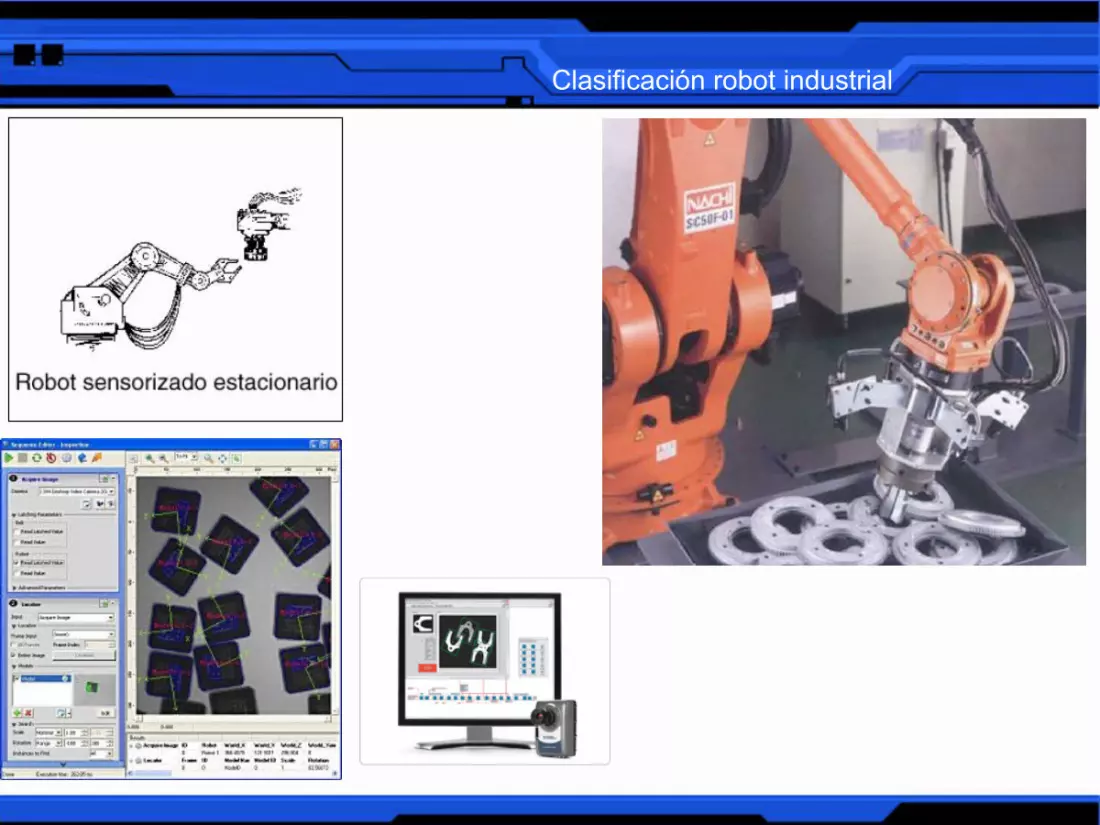
2ª Generación : Adquiere información limitada de suentorno y actúa en consecuencia. Puede localizar,clasificar (visión) y detectar esfuerzos y adaptar susmovimientos en consecuencia.
3ª Generación : Su programación se realiza mediante elempleo de un lenguaje natural. Posee capacidad para laplanificación automática de tareas.
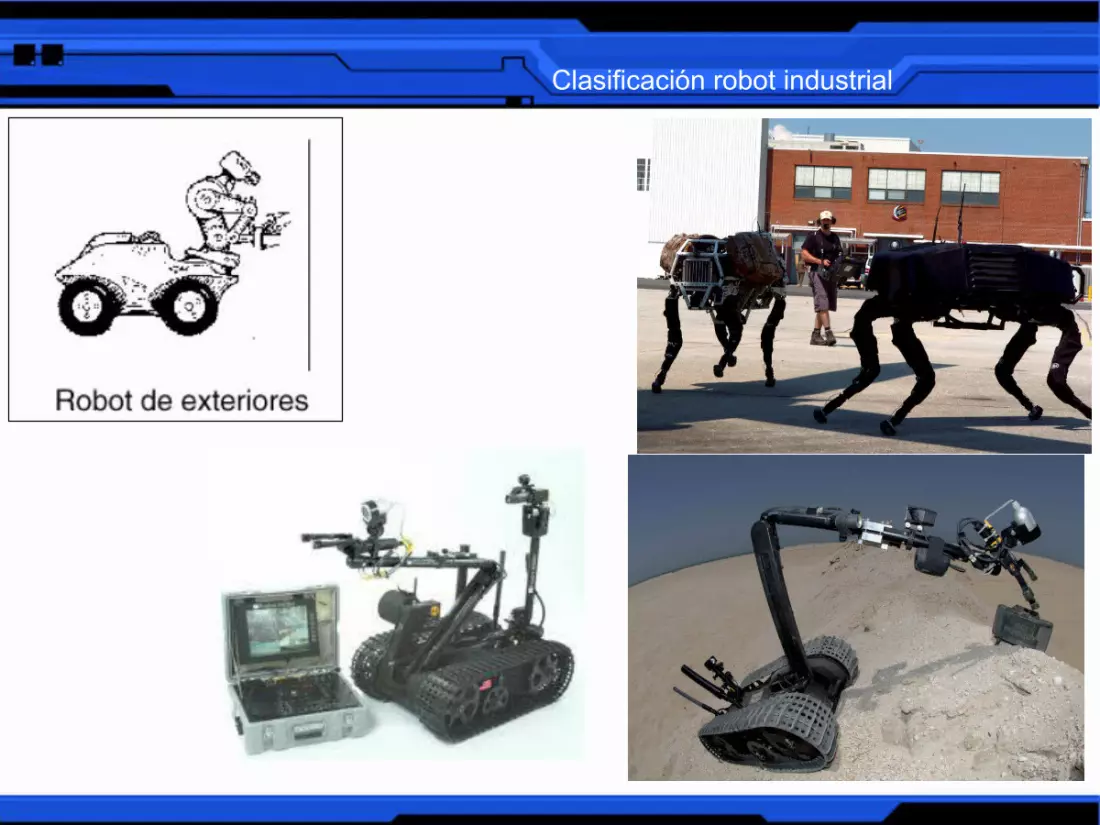
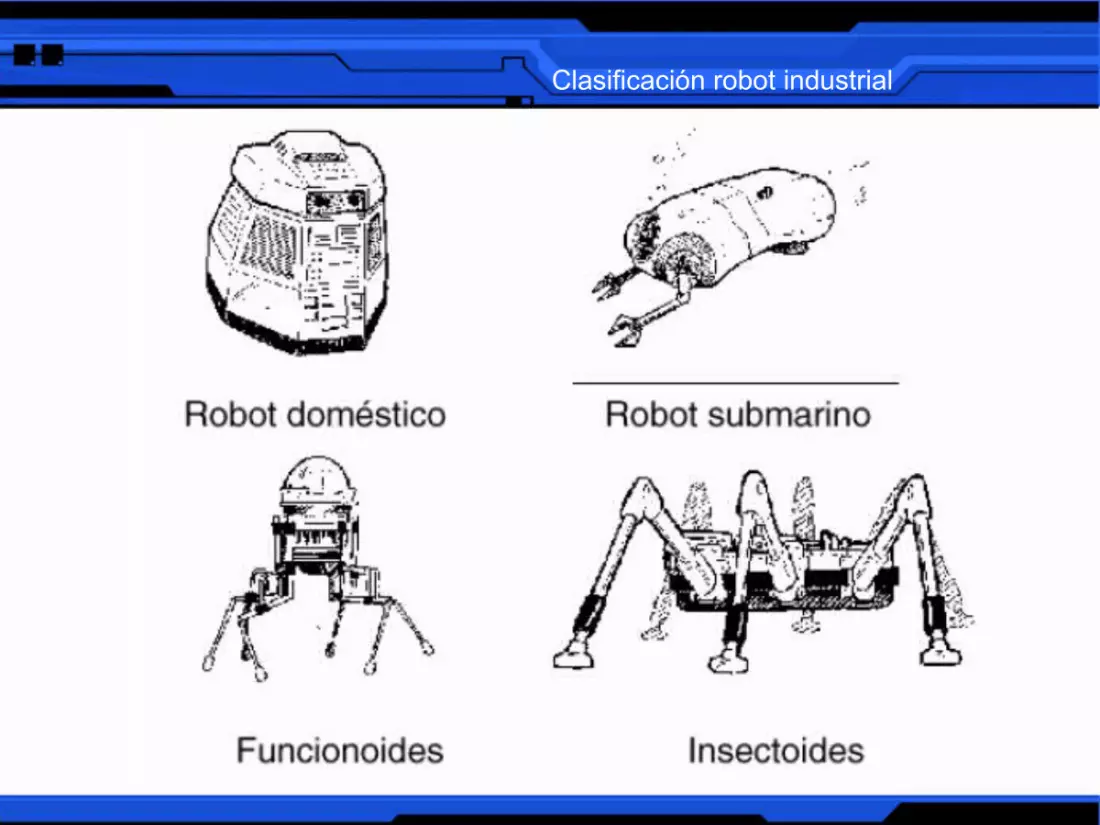
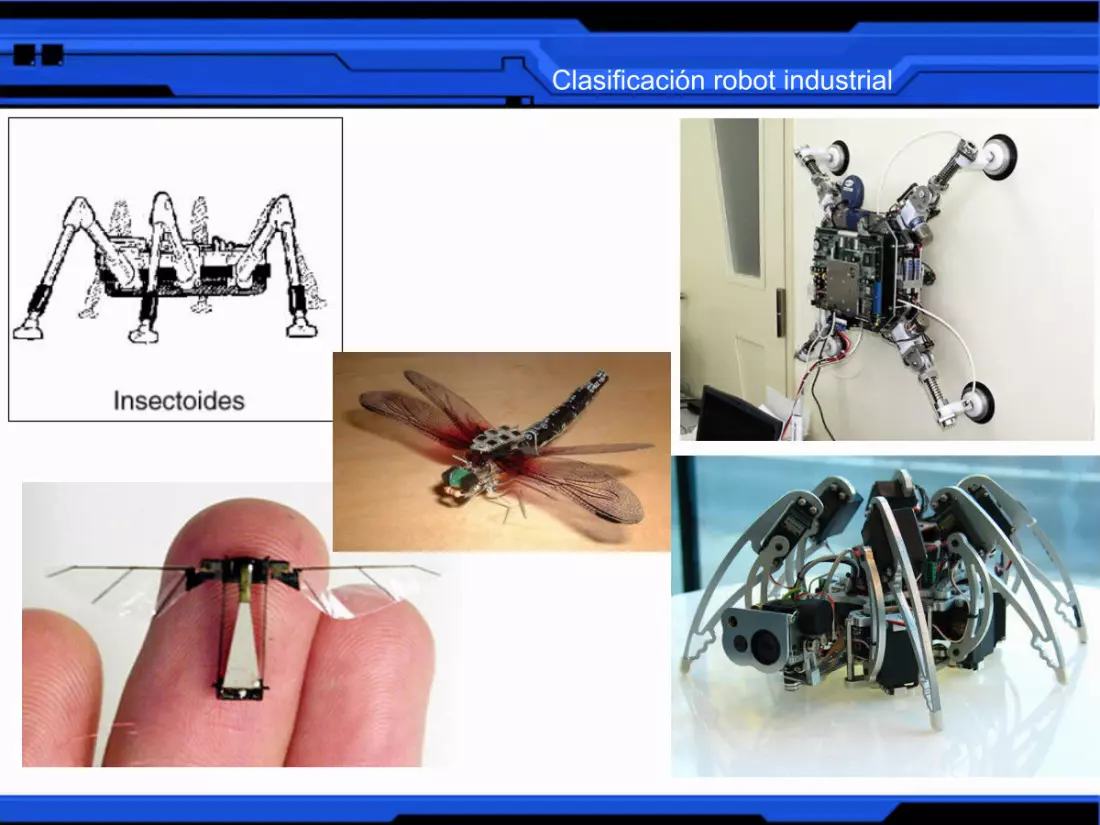
Clasificación robot industrial

Clasificación robot industrial
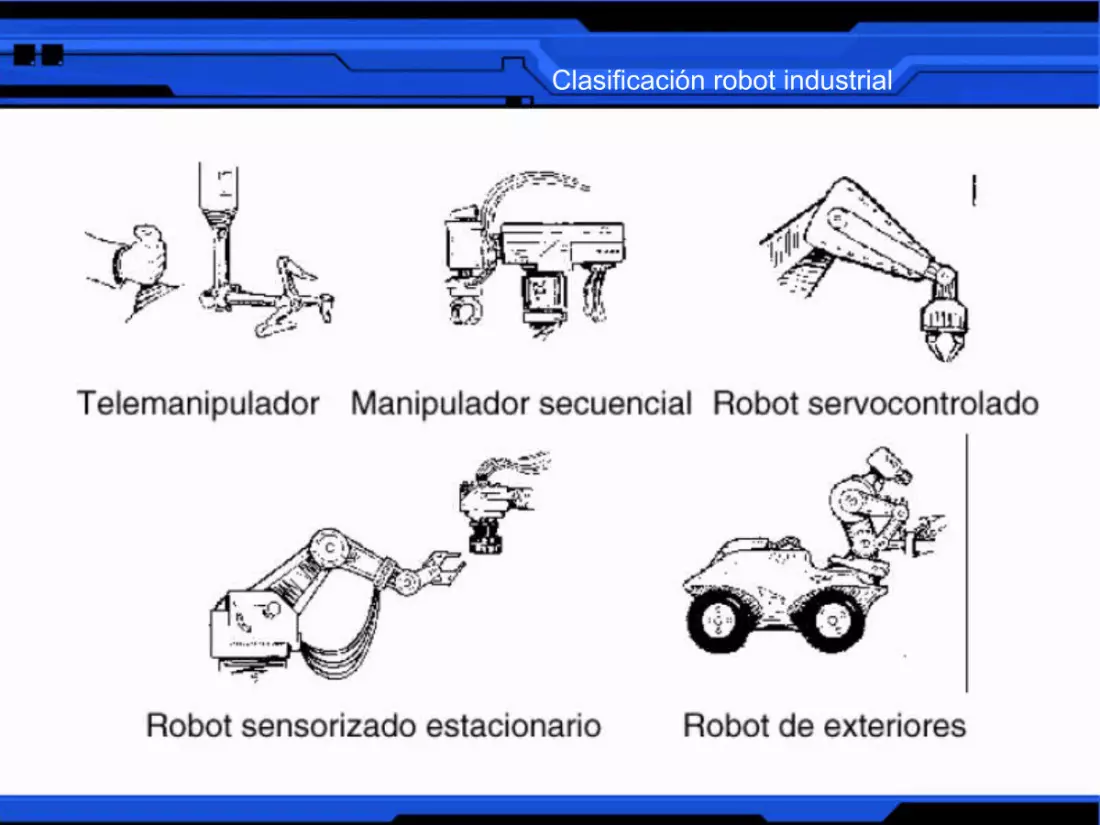
Clasificación de Knasel
Clasificación robot industrial

Clasificación robot industrial
http://www.brokk.com/ http://www.intuitivesurgical.com/products/davinci_surgical_system/
Clasificación robot industrial
Clasificación robot industrial
Clasificación robot industrial
Clasificación robot industrial

Clasificación robot industrial

Clasificación robot industrial
Clasificación robot industrial
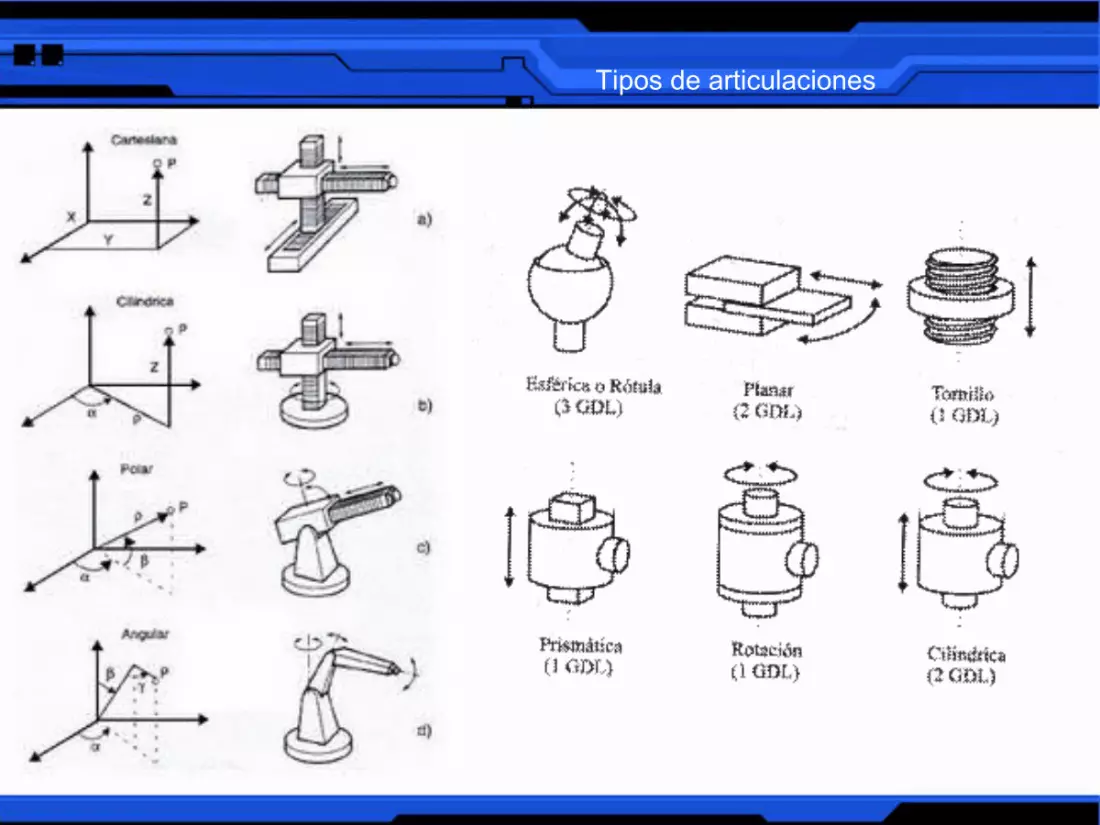
Tipos de articulaciones
Tipos de articulaciones
Tipos de articulaciones

Configuración cartesiana: Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y yZ.
Los movimientos que realiza este robot entre un punto y otro son con base en interpolaciones lineales.
Tipos de articulaciones
GANTRY ROBOT
GÜDELFESTO
PALETIZADOBODEGAS

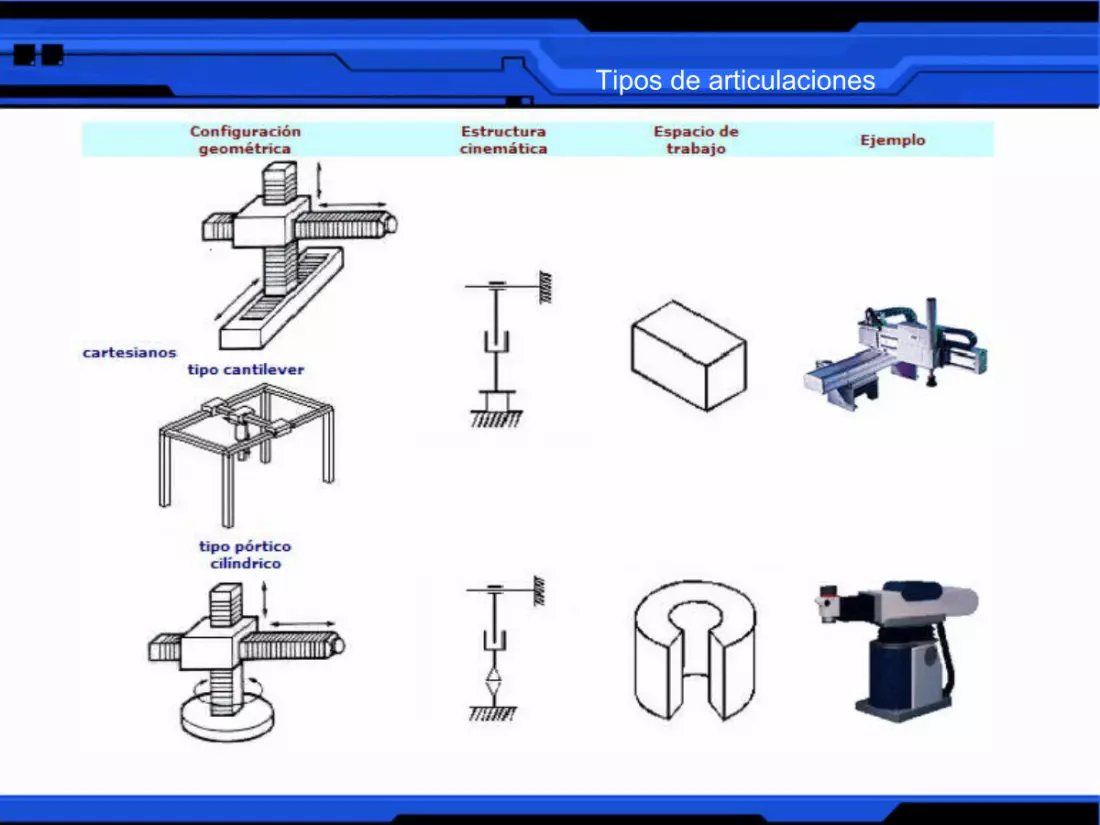
Tipos de articulaciones
Configuración cilíndrica: Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad.
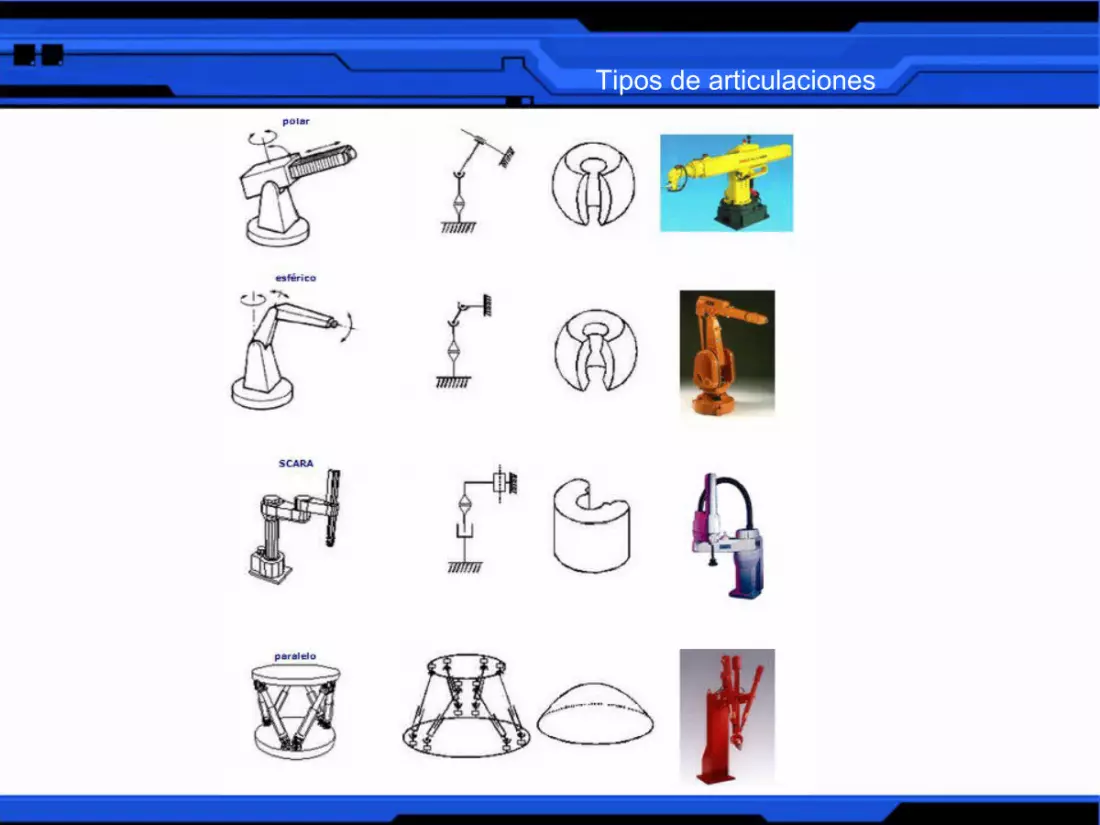
Configuración polar: Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal.

Tipos de articulaciones
Configuración angular o esferico (o de brazo articulado): Presenta una articulación con movimiento rotacional y dos angulares.
Angular / esferico ANTROPOMORFO6 GDL / DOF

no clásica lo representa el robot tipo SCARA.
LAB.MuestrasMaestranzasPaletizado alimentos
Tipos de articulaciones
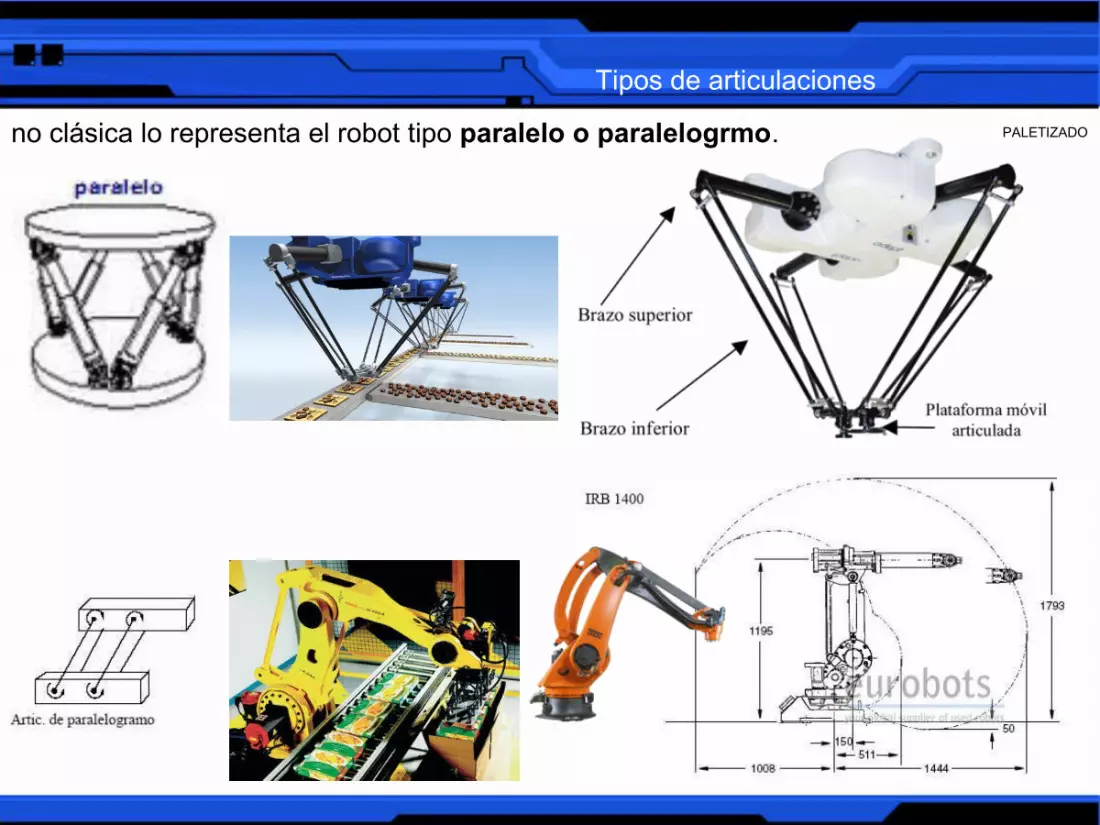
no clásica lo representa el robot tipo paralelo o paralelogrmo. PALETIZADO
Tipos de articulaciones
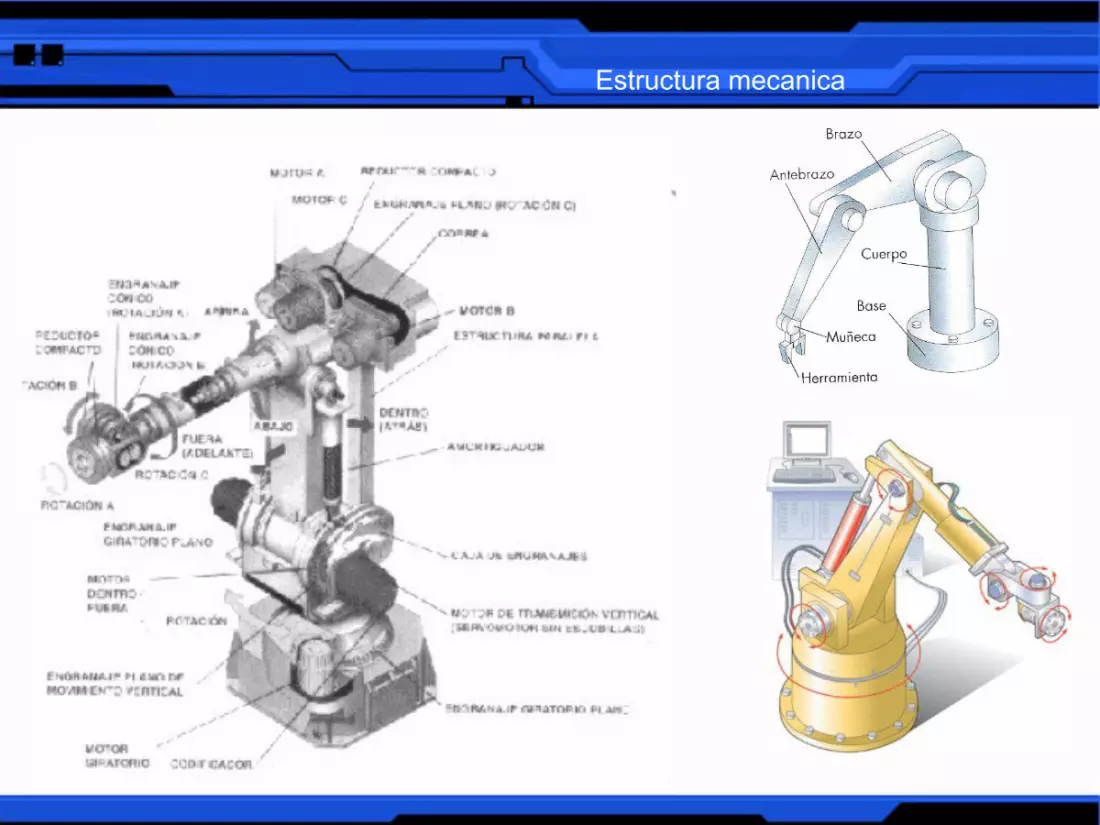
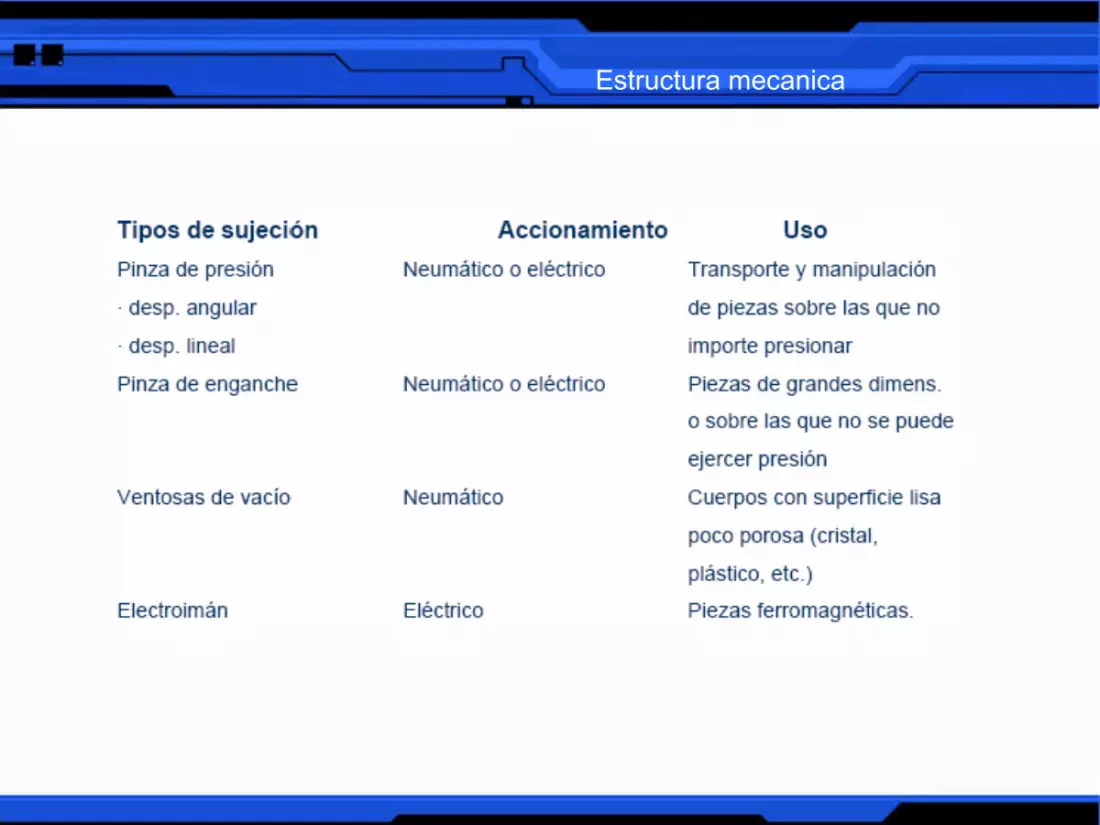
Estructura mecanica
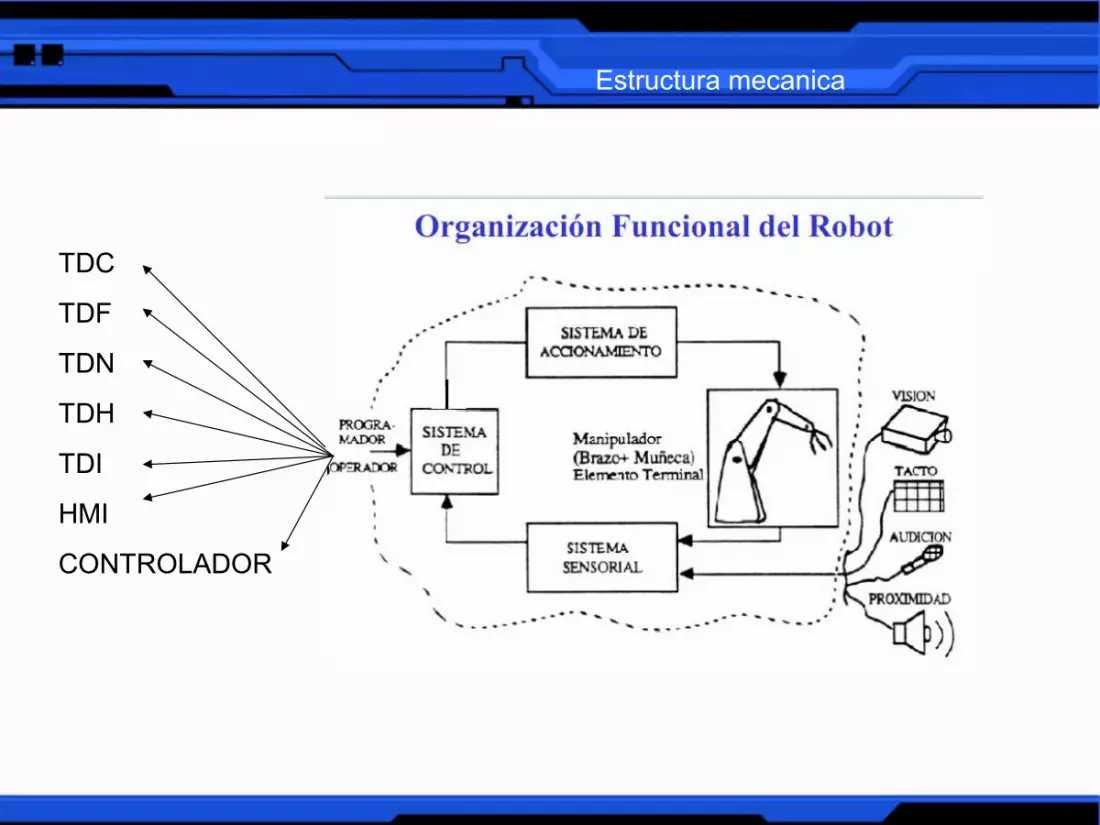
Estructura mecanica
TDC
TDF
TDN
TDH
TDI
HMI
CONTROLADOR
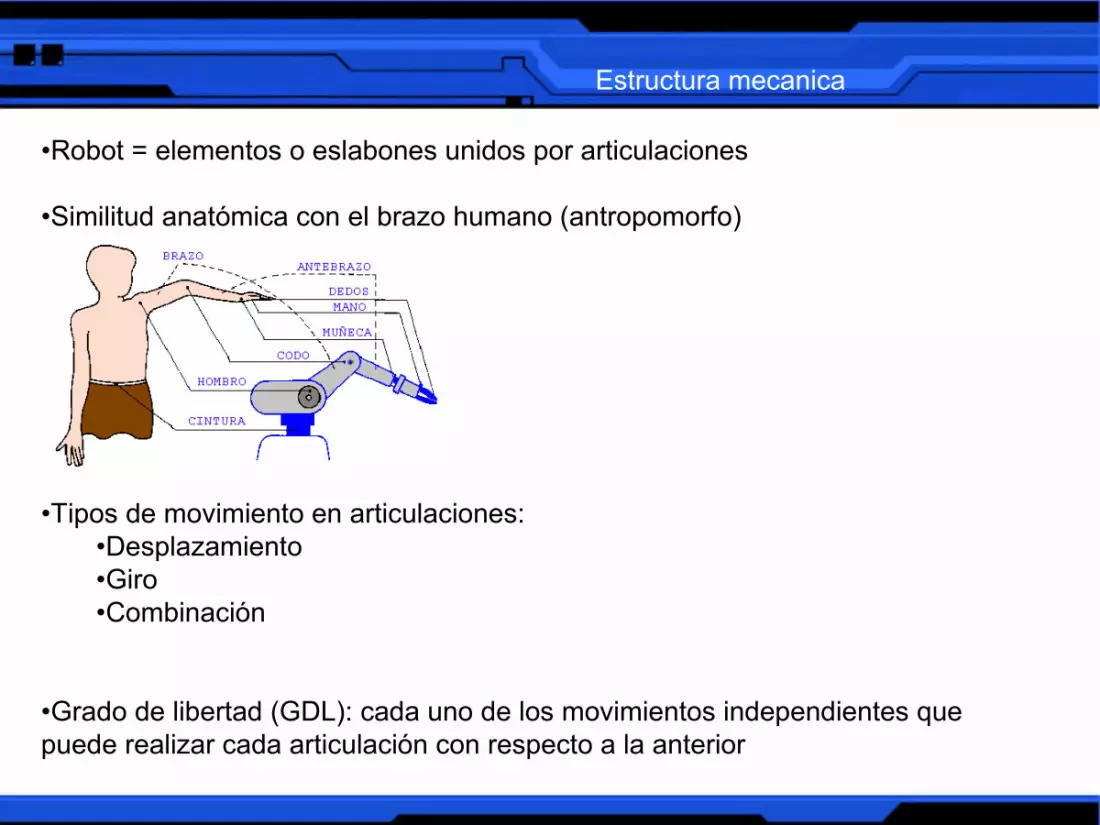
Estructura mecanica
•Robot = elementos o eslabones unidos por articulaciones
•Similitud anatómica con el brazo humano (antropomorfo)
•Tipos de movimiento en articulaciones:•Desplazamiento•Giro•Combinación
•Grado de libertad (GDL): cada uno de los movimientos independientes que puede realizar cada articulación con respecto a la anterior
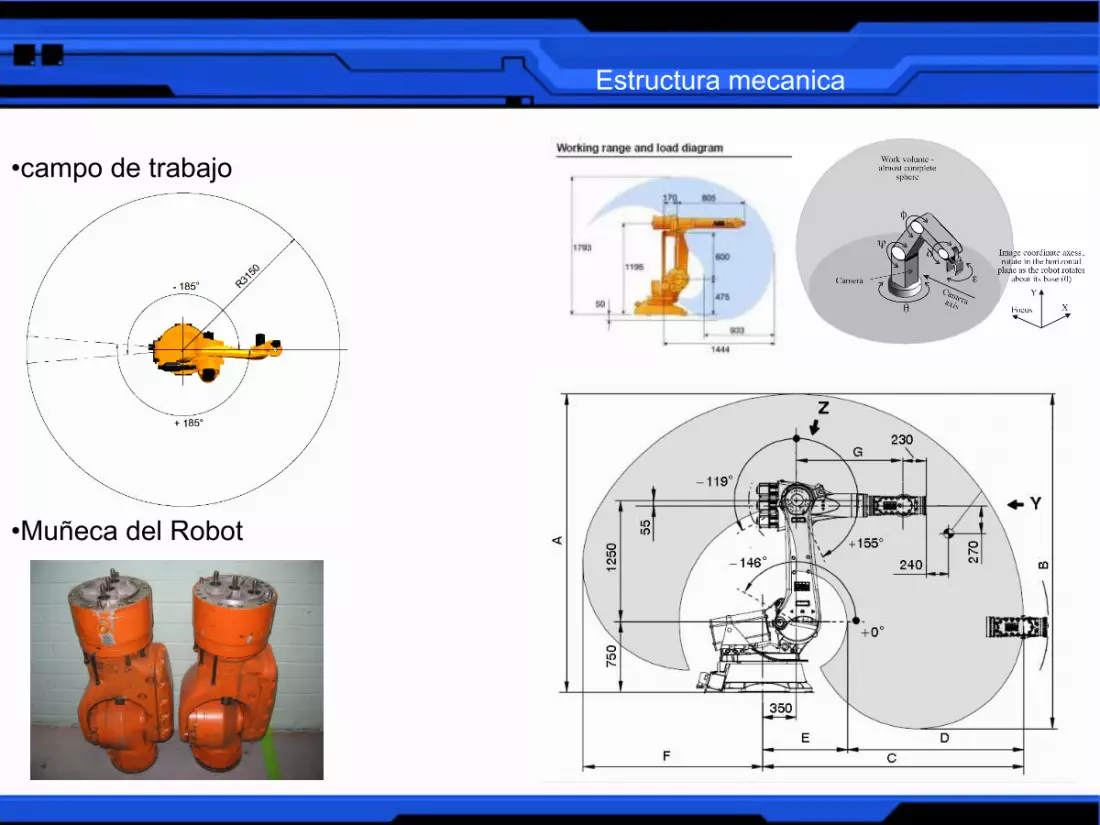
Estructura mecanica
•campo de trabajo
•Muñeca del Robot

Estructura mecanica
•Herramientas
•TCP (tool center position)
•Vacio SCHMALZ , FESTO, SMC
EOAT
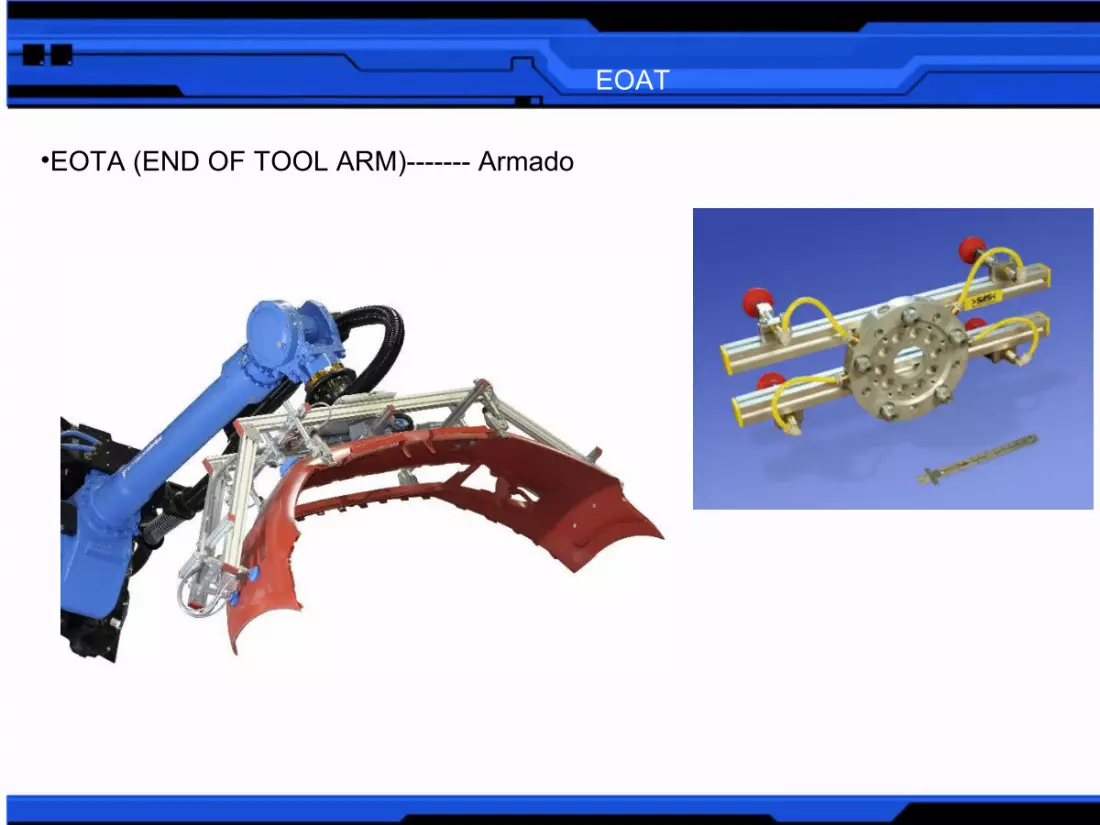
•EOTA (END OF TOOL ARM)------- Armado
EOAT
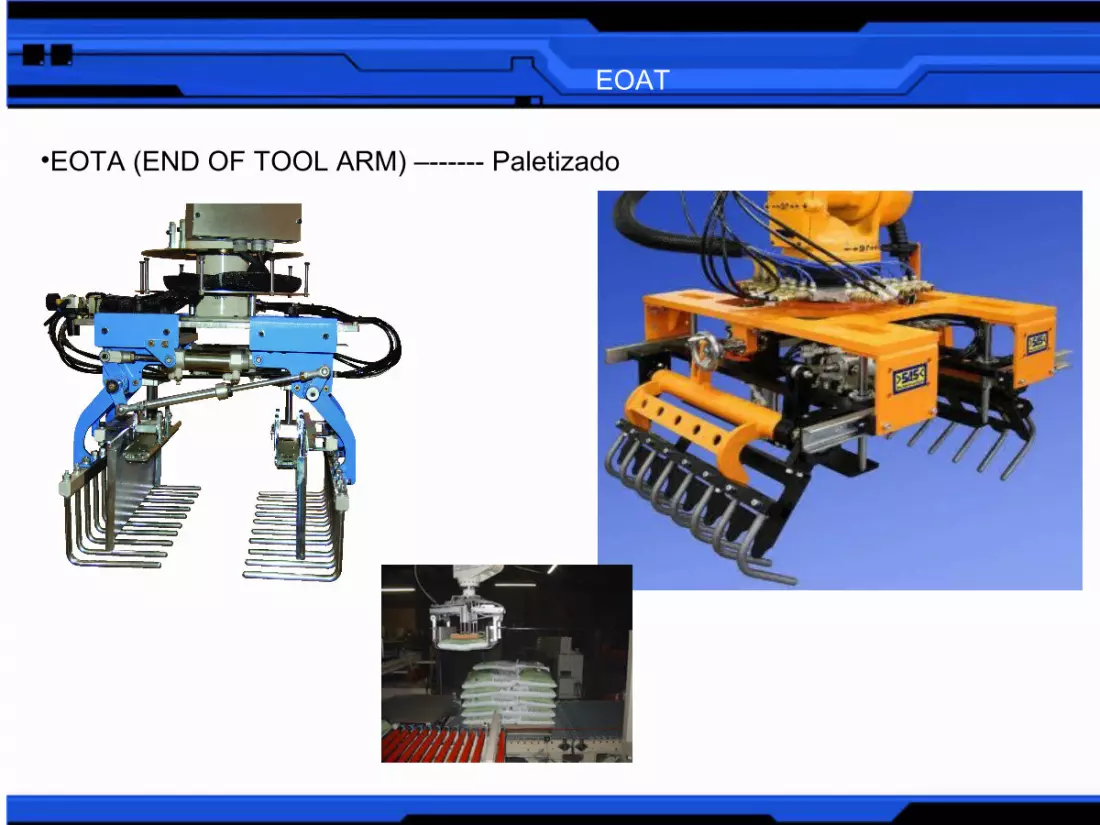
•EOTA (END OF TOOL ARM) –------ Paletizado

EOAT
•EOTA (END OF TOOL ARM) –------ Intercambiador

EOAT
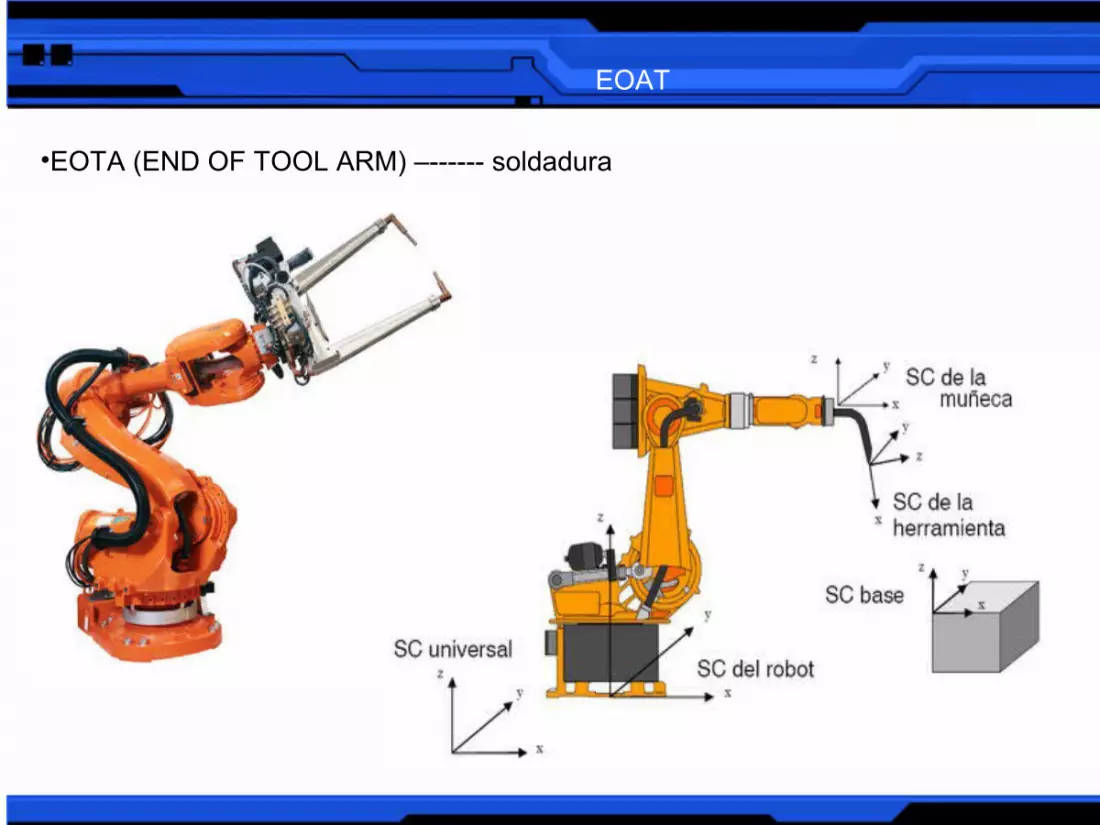
•EOTA (END OF TOOL ARM) –------ soldadura
EOAT
•EOTA (END OF TOOL ARM) –------ soldadura
EOAT
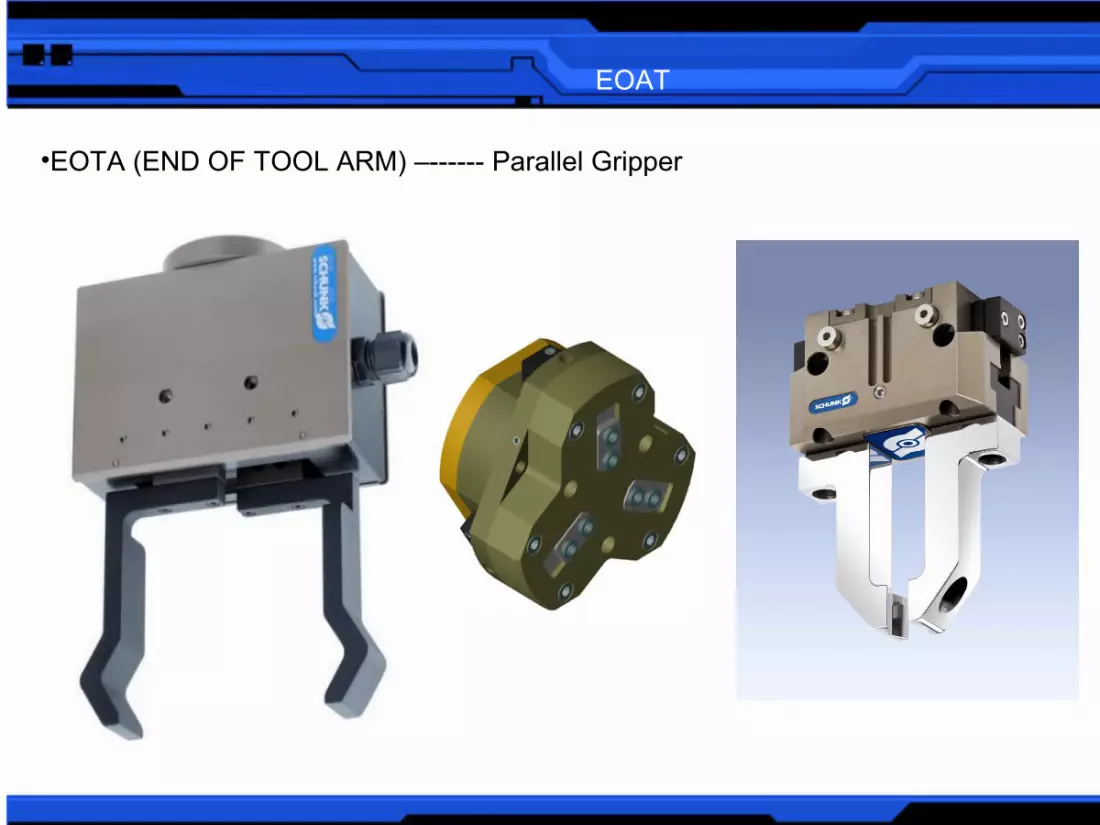
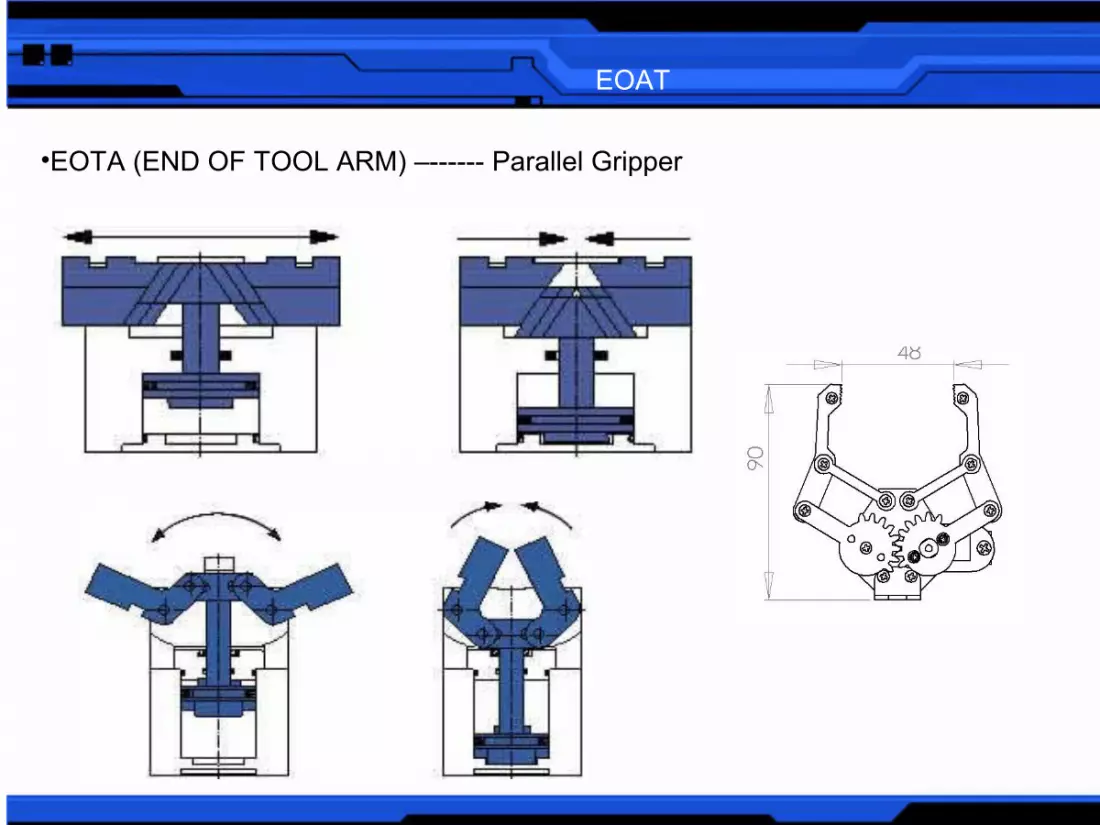
•EOTA (END OF TOOL ARM) –------ Parallel Gripper
EOAT
•EOTA (END OF TOOL ARM) –------ Parallel Gripper
Estructura mecanica

Estructura mecanica
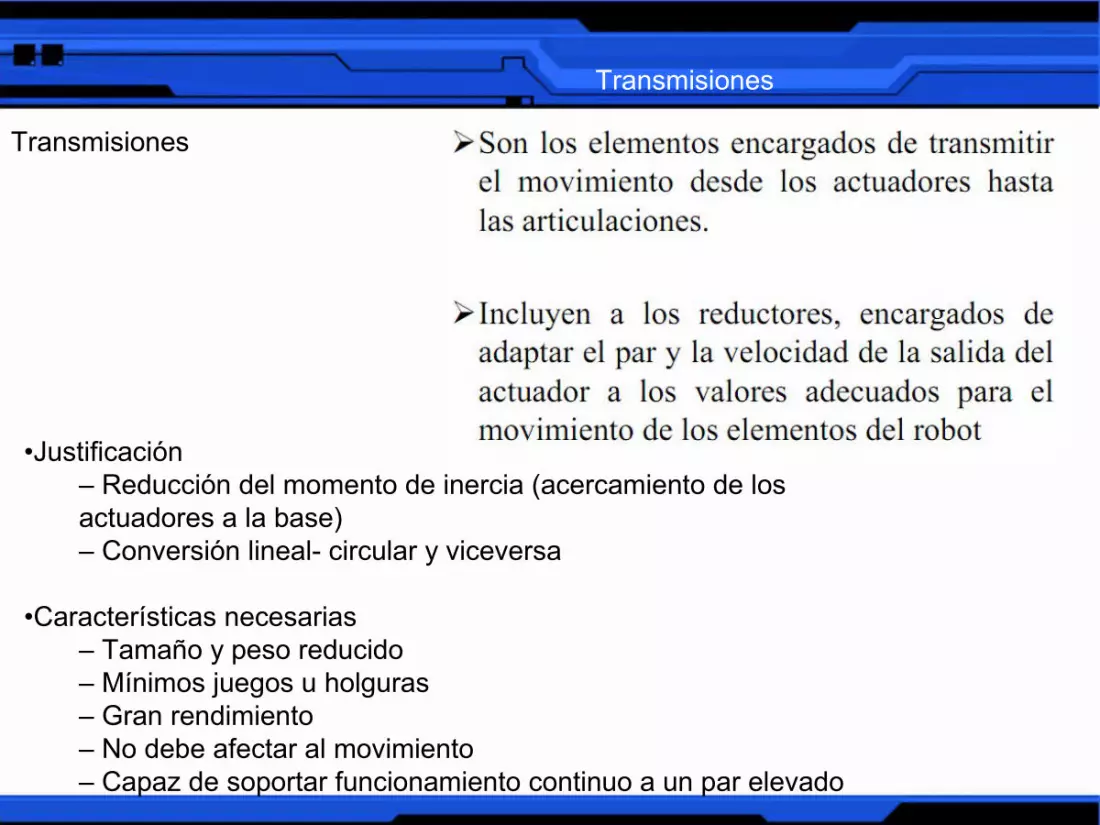
Transmisiones
Transmisiones
•Justificación– Reducción del momento de inercia (acercamiento de losactuadores a la base)– Conversión lineal- circular y viceversa
•Características necesarias– Tamaño y peso reducido– Mínimos juegos u holguras– Gran rendimiento– No debe afectar al movimiento– Capaz de soportar funcionamiento continuo a un par elevado
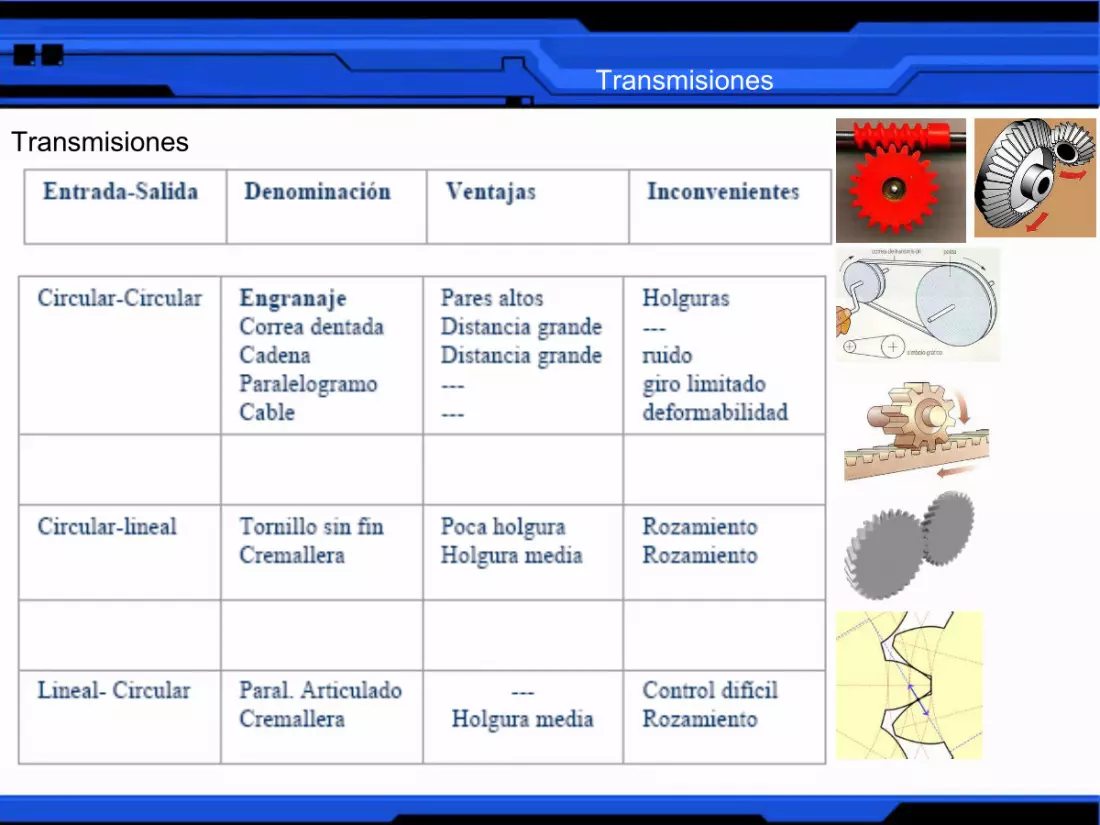
Transmisiones
Transmisiones
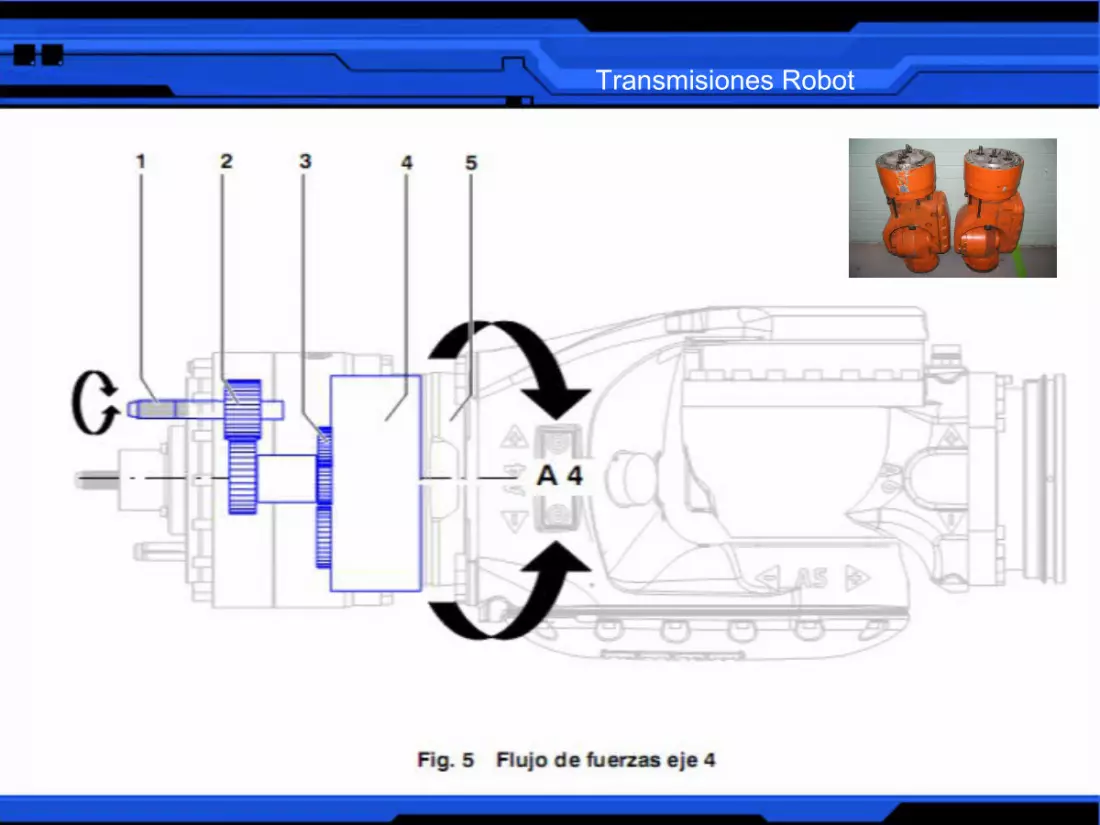
Transmisiones Robot

Transmisiones Robot
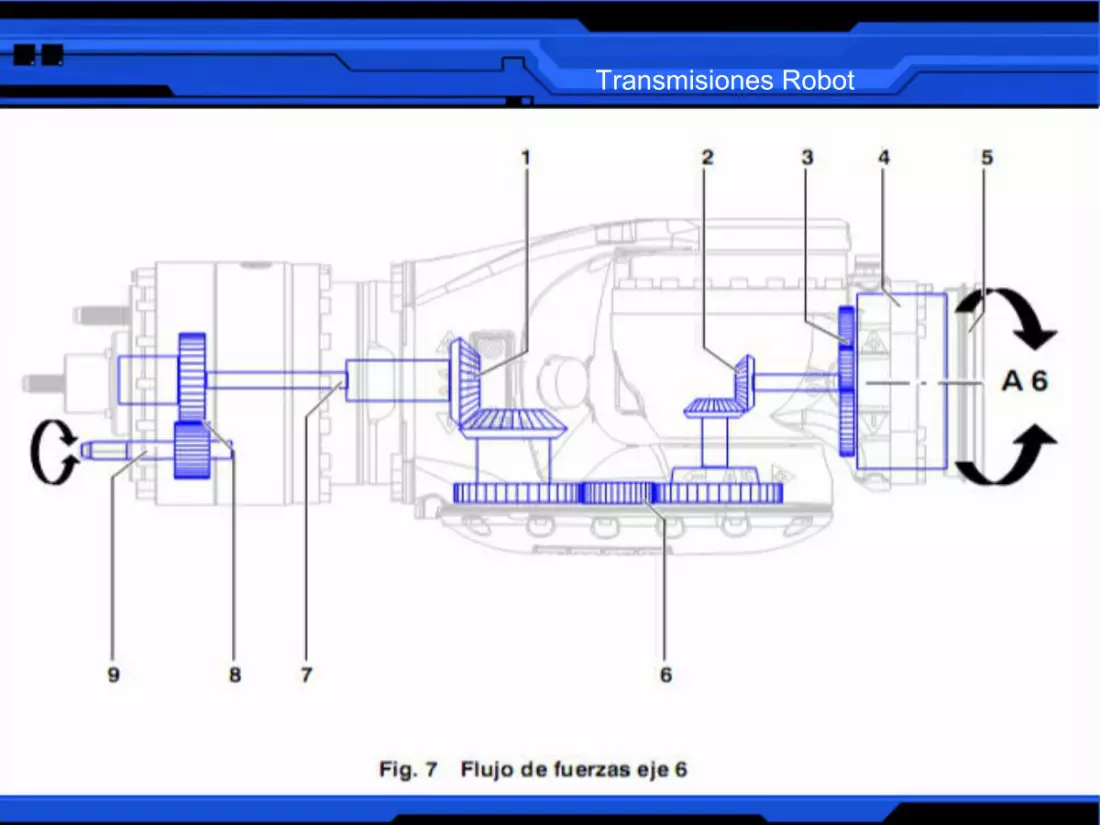
Transmisiones Robot
Reductores
Reductores
•Misión:Adaptar par y velocidad de la salida del actuador a los valores adecuados para el movimiento de los eslabones del robot
•Específicos para robots (altas prestaciones)
•Características:– Bajo peso, tamaño y rozamiento– Capacidad de reducción elevada en un solo paso– Mínimo momento de inercia– Mínimo juego o Backslash– Alta rigidez torsional

Reductores
Reductores

Reductores
Reductores
Por los puntos de contacto las velocidades a distintos diametros cambian.
Reductores
Reductores
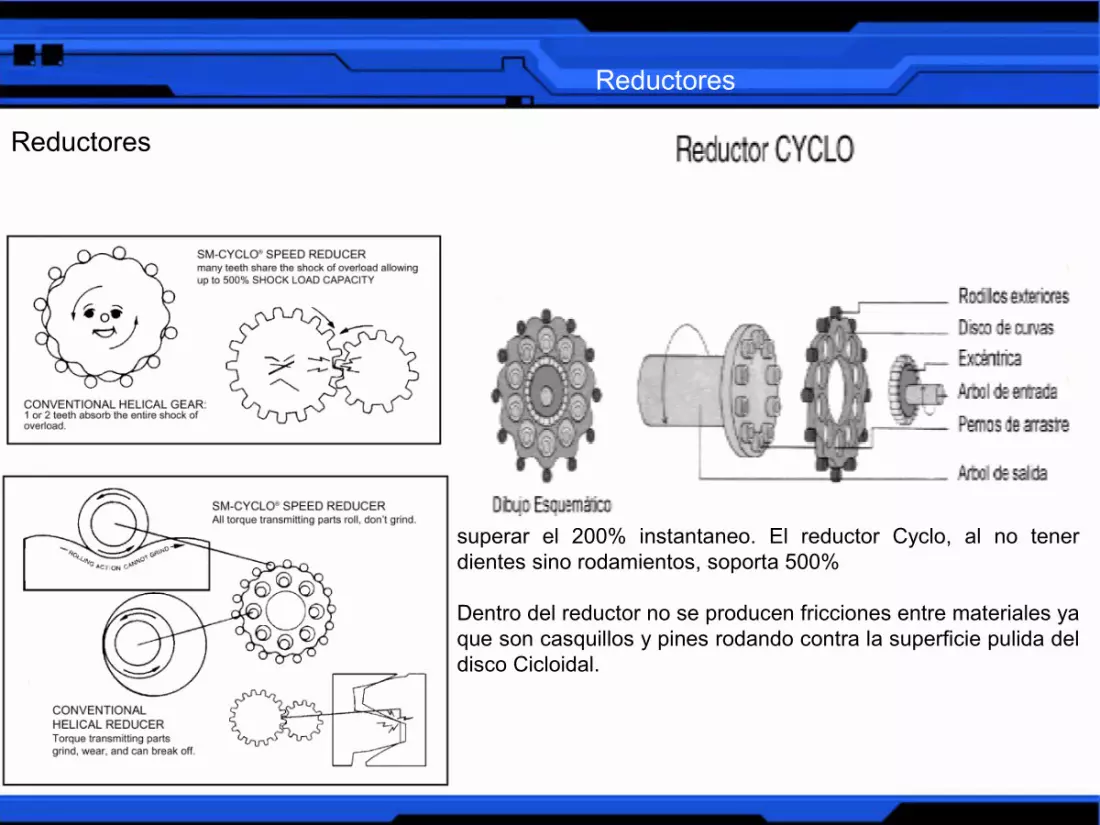
superar el 200% instantaneo. El reductor Cyclo, al no tener dientes sino rodamientos, soporta 500%
Dentro del reductor no se producen fricciones entre materiales ya que son casquillos y pines rodando contra la superficie pulida del disco Cicloidal.
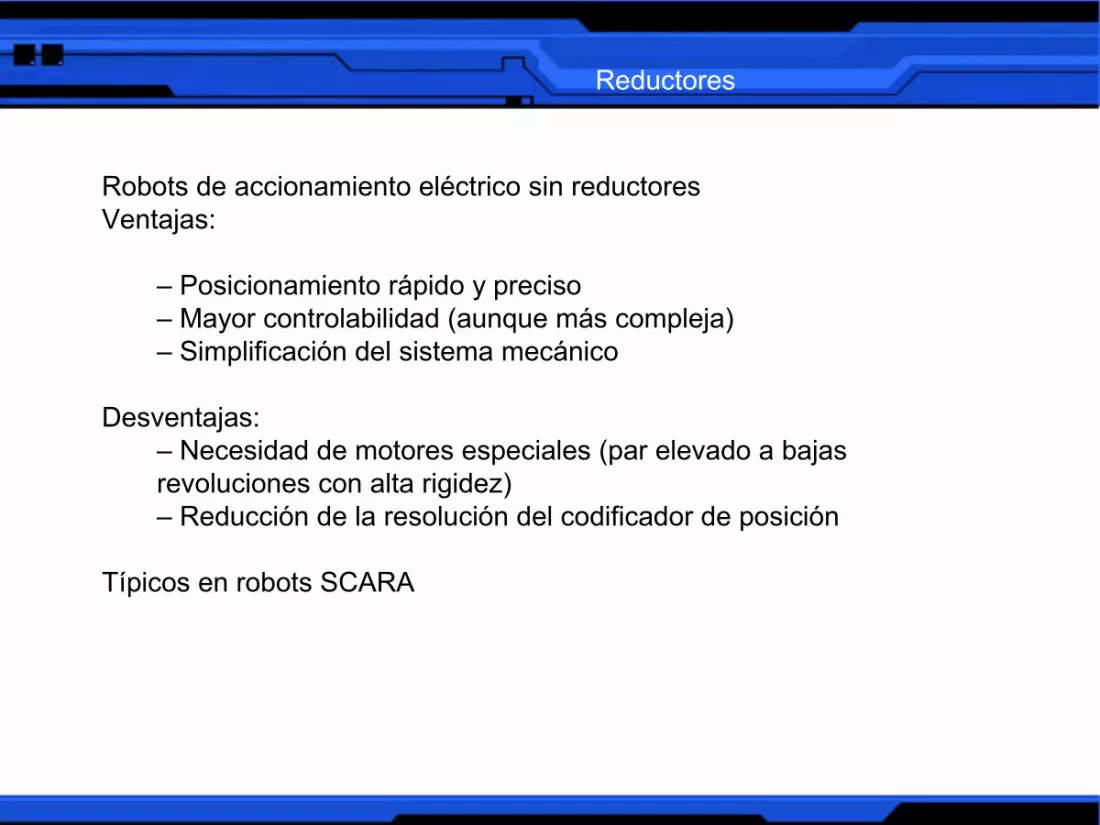
Robots de accionamiento eléctrico sin reductoresVentajas:
– Posicionamiento rápido y preciso– Mayor controlabilidad (aunque más compleja)– Simplificación del sistema mecánico
Desventajas:– Necesidad de motores especiales (par elevado a bajasrevoluciones con alta rigidez)– Reducción de la resolución del codificador de posición
Típicos en robots SCARA
Reductores

Caracteristicas de seleccion
Características de seleccion:•Potencia•Controlabilidad•Peso y volumen•Precisión•Velocidad•Mantenimiento•Coste
PENDIENTE:Motores ElectricosNeumaticaHidraulicaSensores
TAREA N2A
PARA EL:•2 de septiembre
http://mediaumh.es/2011/robots/index.htm
Realizar informe en word con respuestas para items numero 1 y 2
TAREA N2B
PARA EL:•2 de septiembre
1. Al observar el Brazo Robot FANUC, determine:a) Estructura:- Tipo de configuración: _______________________________________________- Grados de libertad: __________________________________________________- Tipos de Articulaciones: ______________________________________________- Número de Eslabones: ________________________________________________- Tipo de actuadores: __________________________________________________b) Transmisiones: (Describir los elementos de transmisión, como piñones, cadenas,reductores, poleas, cables), haga esquemas de estos elementos. (a investigar) _____________________________________________c) Actuadores: _________________________________________________________d) Sensores: ___________________________________________________________e) Elemento terminal: ___________________________________________________





























