Embed Size (px)
Citation preview
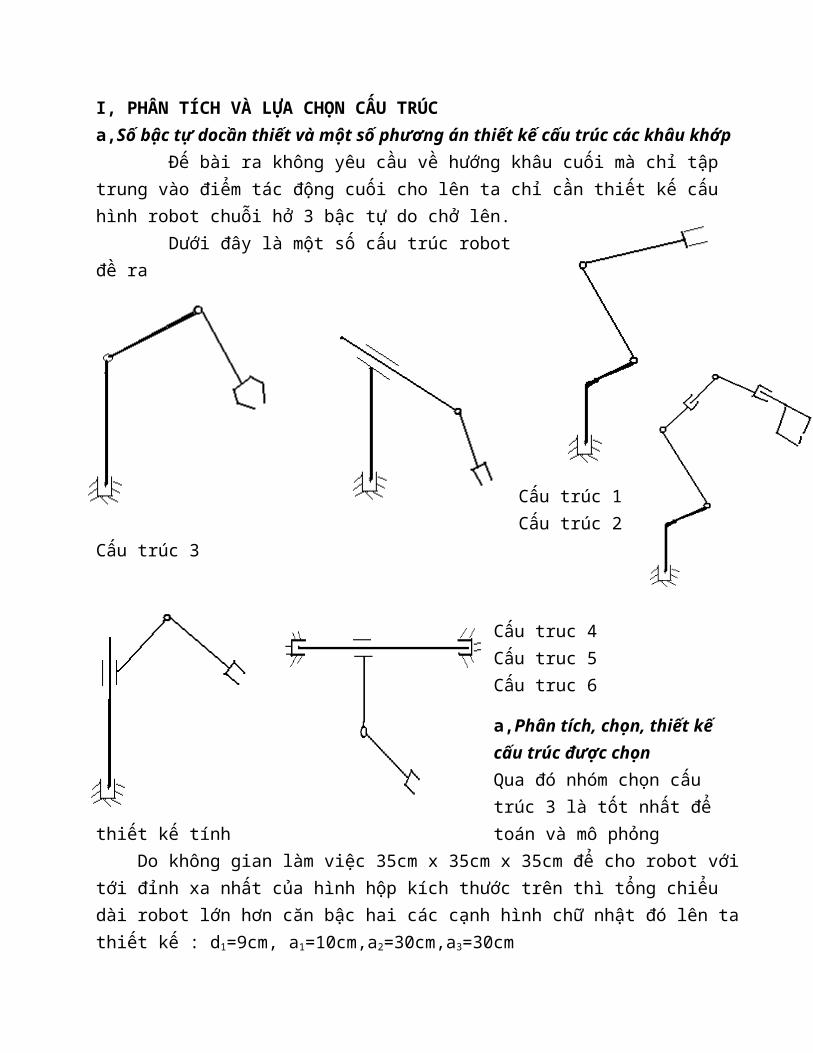
I, PHÂN TÍCH VÀ LỰA CHỌN CẤU TRÚC a,Số bậc tự docần thiết và một số phương án thiết kế cấu trúc các khâu khớp Đế bài ra không yêu cầu về hướng khâu cuối mà chỉ tập trung vào điểm tác động cuối cho lên ta chỉ cần thiết kế cấu hình robot chuỗi hở 3 bậc tự do chở lên. Dưới đây là một số cấu trúc robotđề ra
Cấu trúc 1 Cấu trúc 2
Cấu trúc 3
Cấu truc 4 Cấu truc 5 Cấu truc 6
a,Phân tích, chọn, thiết kế cấu trúc được chọn Qua đó nhóm chọn cấu trúc 3 là tốt nhất để
thiết kế tính toán và mô phỏng Do không gian làm việc 35cm x 35cm x 35cm để cho robot vớitới đỉnh xa nhất của hình hộp kích thước trên thì tổng chiểu dài robot lớn hơn căn bậc hai các cạnh hình chữ nhật đó lên tathiết kế : d1=9cm, a1=10cm,a2=30cm,a3=30cm

Ta có mô hình tổng thể như hình dưới :
Hình 1.1 Mô hình robot hàn điểm 3 bậc RRR
Các khâu khớp cụ thể như sau :
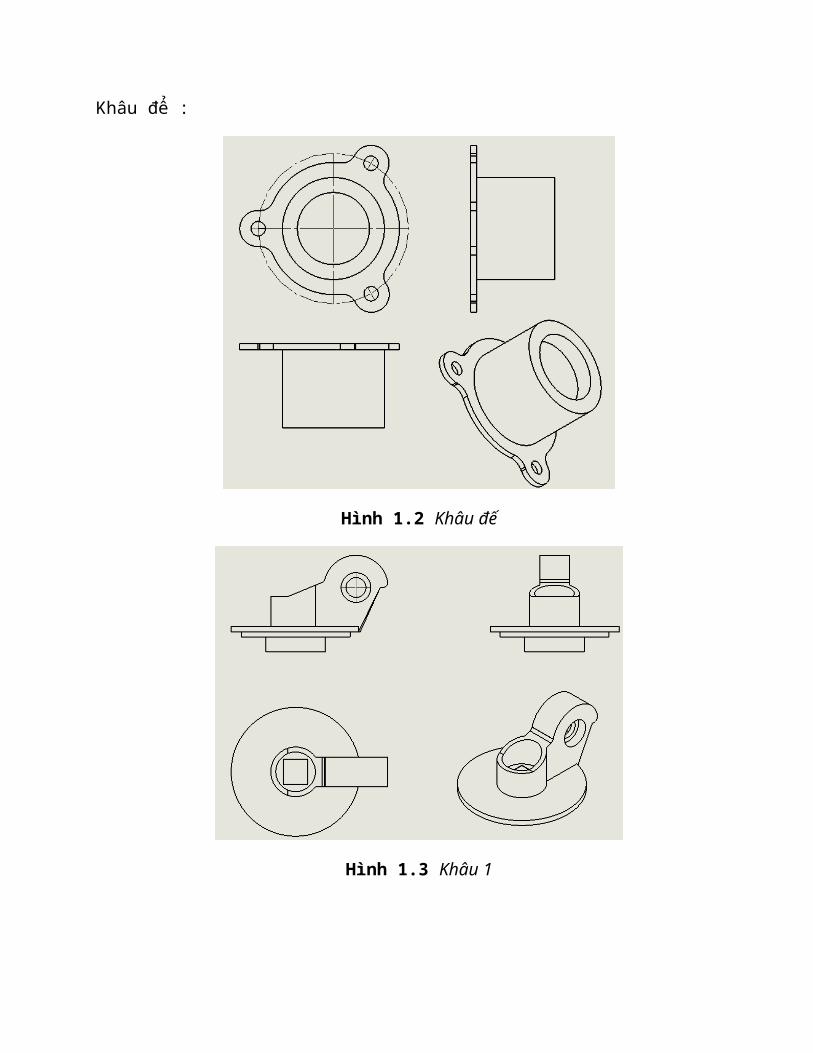
Khâu để :
Hình 1.2 Khâu đế
Hình 1.3 Khâu 1
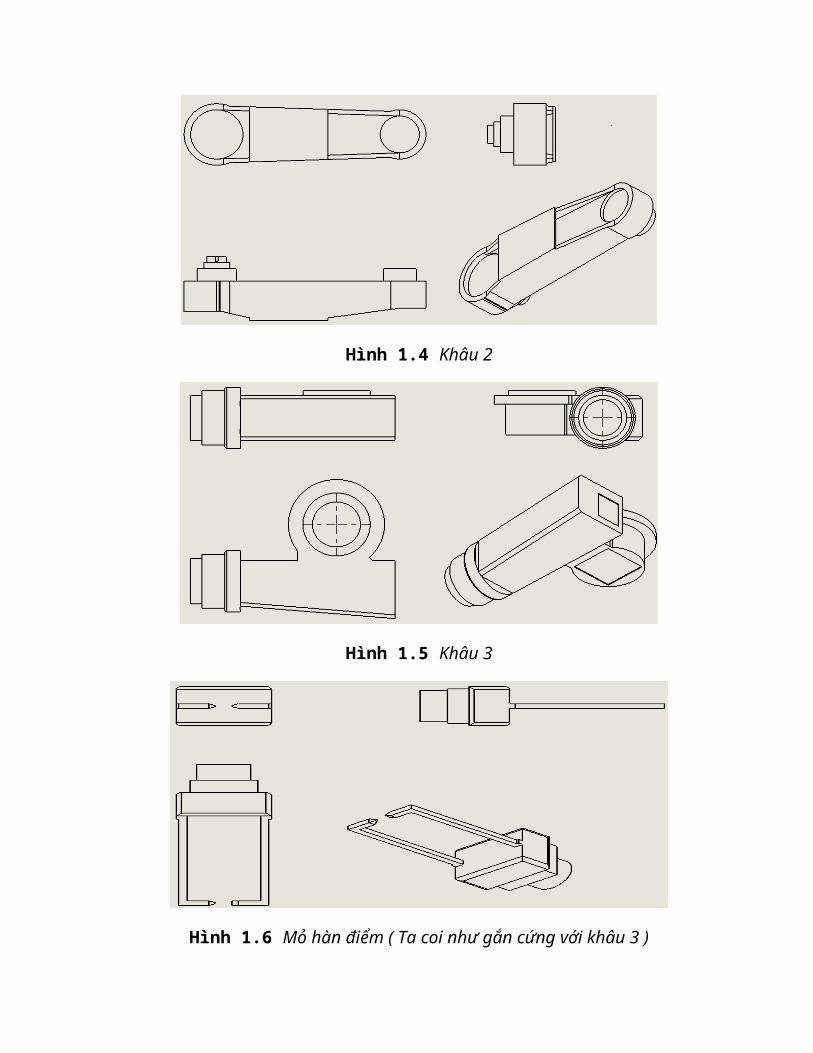
Hình 1.4 Khâu 2
Hình 1.5 Khâu 3
Hình 1.6 Mỏ hàn điểm ( Ta coi như gắn cứng với khâu 3 )
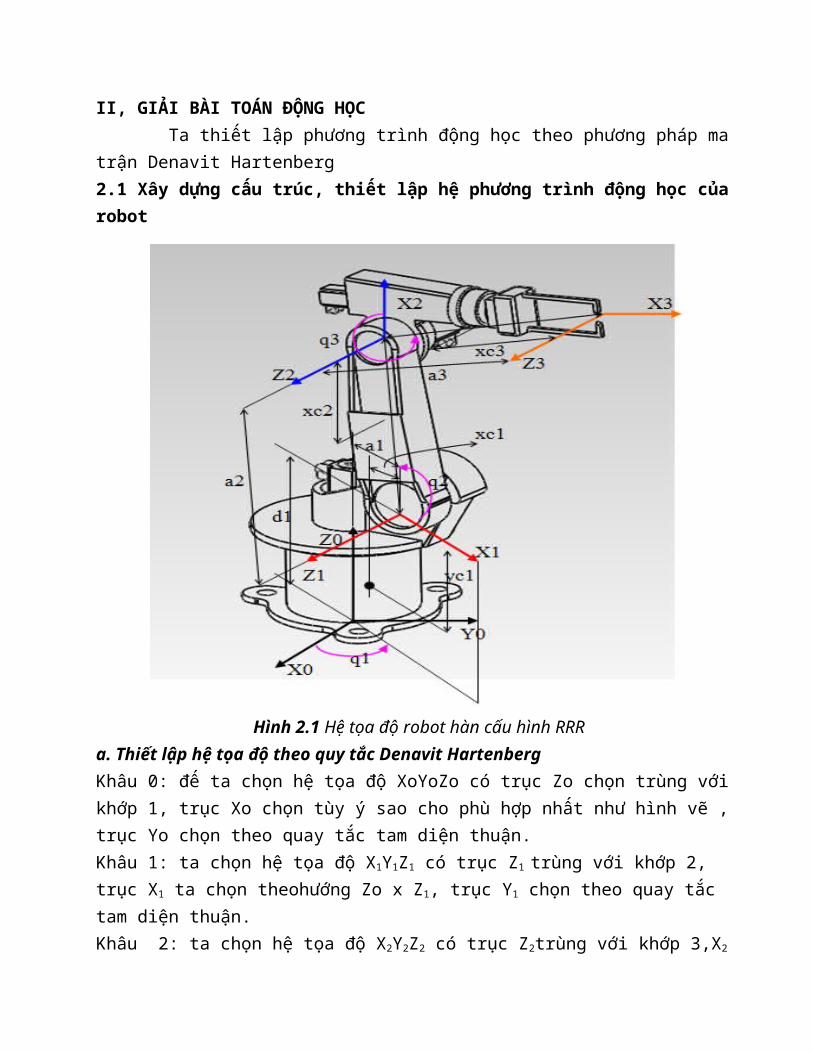
II, GIẢI BÀI TOÁN ĐỘNG HỌC Ta thiết lập phương trình động học theo phương pháp ma trận Denavit Hartenberg2.1 Xây dựng cấu trúc, thiết lập hệ phương trình động học của robot
Hình 2.1 Hệ tọa độ robot hàn cấu hình RRRa. Thiết lập hệ tọa độ theo quy tắc Denavit HartenbergKhâu 0: đế ta chọn hệ tọa độ XoYoZo có trục Zo chọn trùng với khớp 1, trục Xo chọn tùy ý sao cho phù hợp nhất như hình vẽ , trục Yo chọn theo quay tắc tam diện thuận.Khâu 1: ta chọn hệ tọa độ X1Y1Z1 có trục Z1 trùng với khớp 2, trục X1 ta chọn theohướng Zo x Z1, trục Y1 chọn theo quay tắc tam diện thuận. Khâu 2: ta chọn hệ tọa độ X2Y2Z2 có trục Z2trùng với khớp 3,X2

chọn theo đường vuông góc chung Z1 và Z2, Y2 chọn theo quy tắc tam diện thuận. Khâu 3: Ta chọn hẹ X3Y3Z3 có trục Z3 song song Z2 X2 chọntheo đường vuông góc chung Z2 và Z3, Y3 chọn theo quy tắn tam diện thuận.b.Thiết lập hệ phương trình động học của robotTừ việc chọn hệ tọa độ ta có bảng DH sau:
Khâu di θi ai αi
1 d1 q1 a1 π/22 0q2 a2
03 0q3 a3
0
= , =
=
= . =
= . . = Với C1=cos(q1), S1=sin(q1), C2=cos(q2), S2=sin(q2), S23=sin(q2+q3), C23=cos(q2+q3), q=[q1, q2, q3]T
Mặt khác ta lại mô tả được hướng và vị trí qua ma trận sau thông qua vector

p=[xE, yE, zE, α, β, η]T α, β, η là 3 góc Cardan.
=So sánh hai ma trận , ta thiết lập được hệ phương
trình động học sau:
2.2. Giải bài toán động học thuận Để tính toán ta chọn d1=1 (m), a2=0.5 (m), a3=0.4 (m).a, Xác định vận tốc điểm tác động cuối và vận tốc góc khâu thaotác Từ phương trình động ở trên ta rút ra ( với q=[q1, q2, q3]T )
=
=
JE =

=
> =
Từ ma trận ta rút trân cosin chỉ hướng
= => =
b,Xây dựng quy luật chuyển động từng khâu từ đó vẽ quỹ đạo điểm E, vận
tốc điểm E và vận tốc góc.
Để khảo sát kết quả trên ta xây dựng quy luật chuyển
động của các biến khớp q như sau
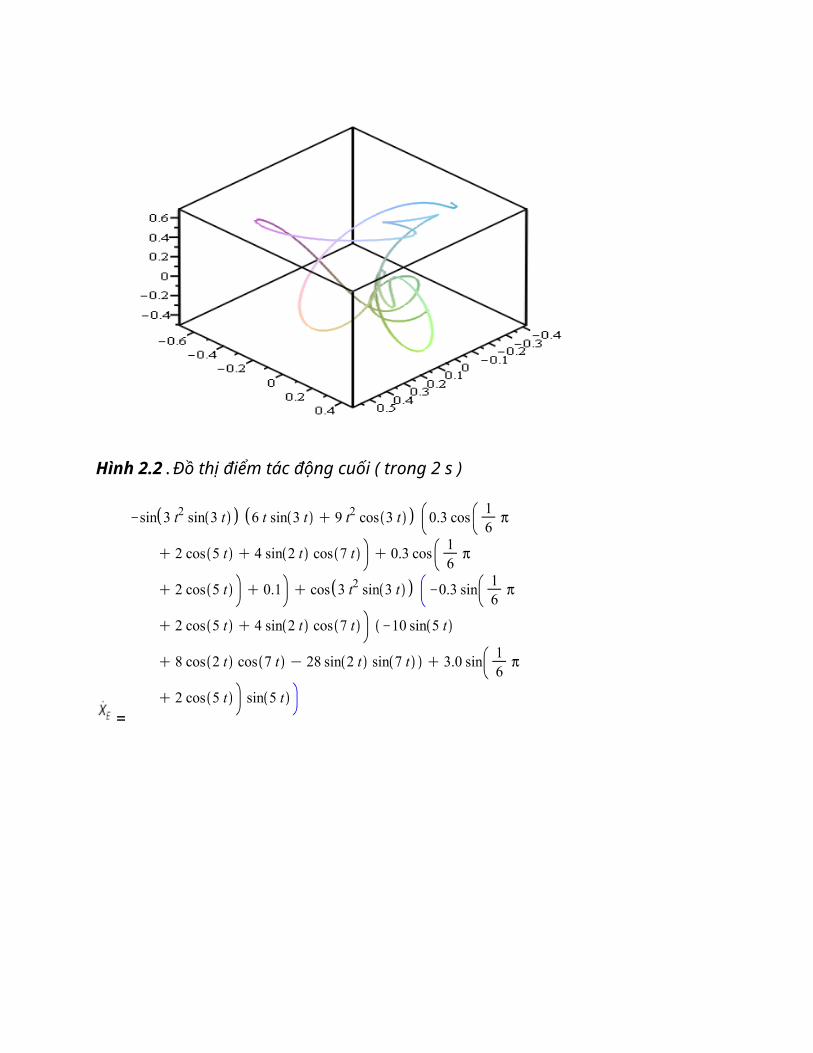
Hình 2.2.Đồ thị điểm tác động cuối ( trong 2 s )
=

=
= Ta tính được
Dùng maple ta vẽ được các đồ thị sau
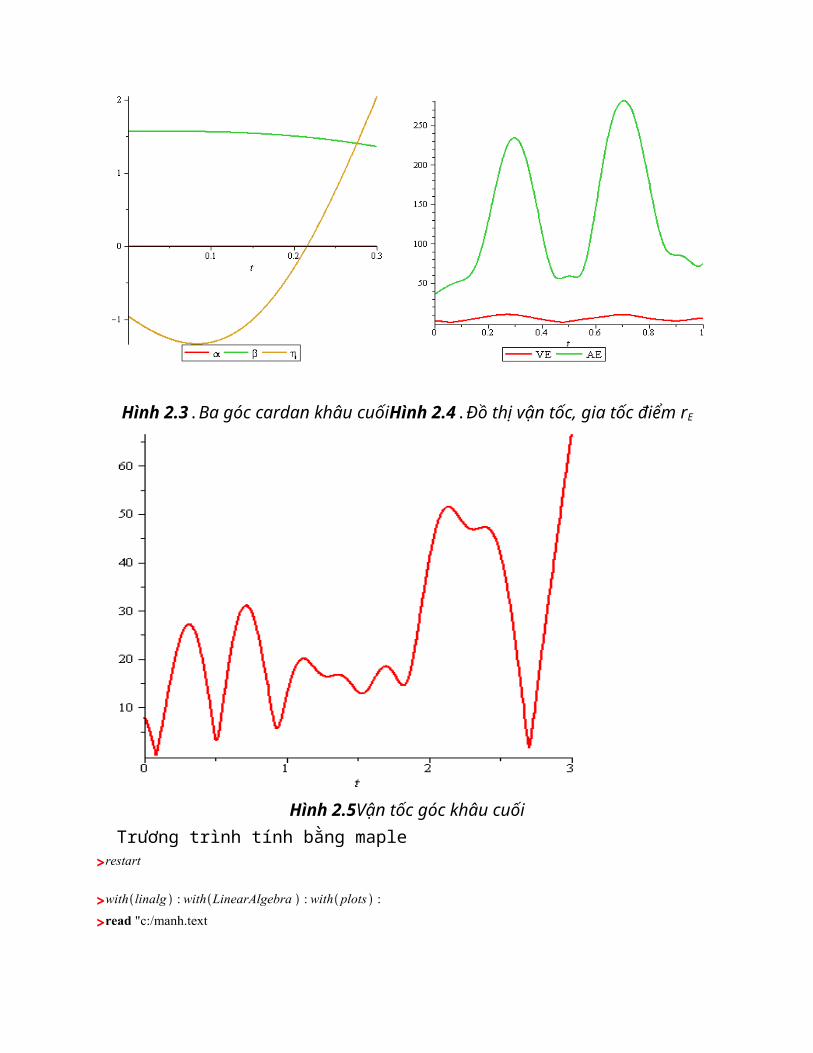
Hình 2.3.Ba góc cardan khâu cuốiHình 2.4.Đồ thị vận tốc, gia tốc điểm rE
Hình 2.5Vận tốc góc khâu cuối Trương trình tính bằng maple>
>>

>>
>
>
>
>>
>
>
>
>>

>
2.3. Giải bài toán động học ngượca, Giải bằng phương pháp giải tíchtừ hệ phương
Từ phương trình 1, 2 trong hệ ta rút ra : (2.1)
(2.2) Ta viết lại hệ như sau :
Giải phương đại số tuyến tính ta có :
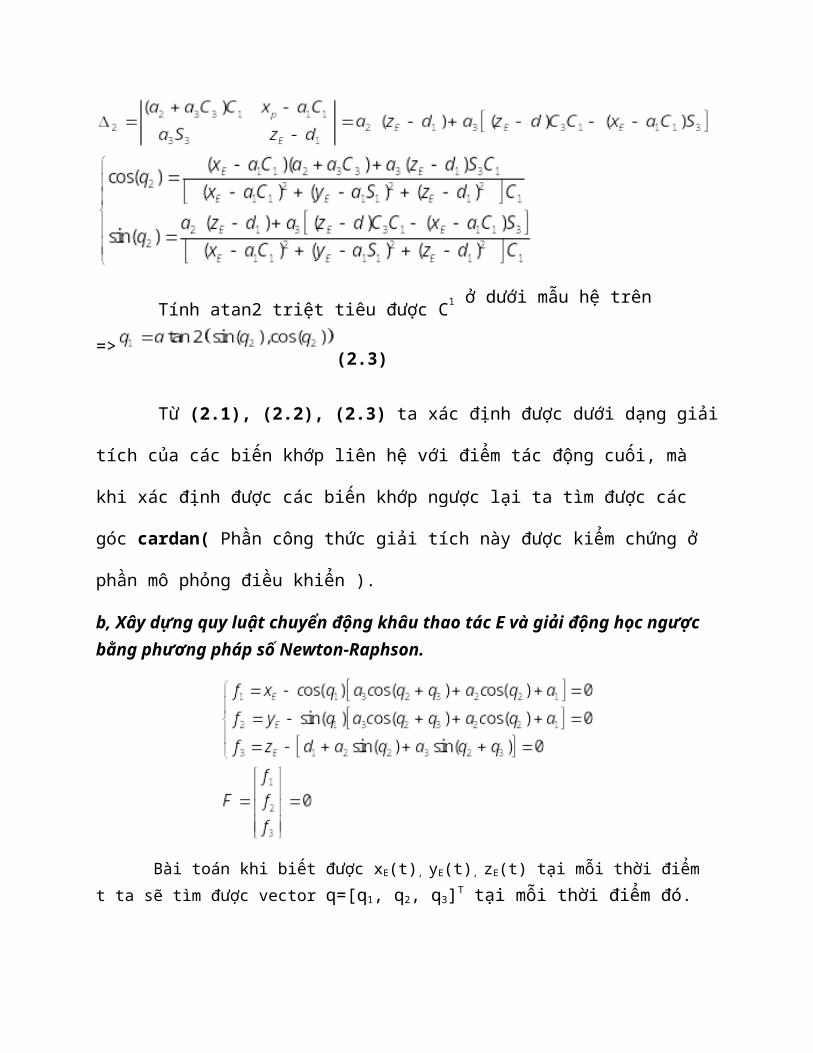
Tính atan2 triệt tiêu được C1 ở dưới mẫu hệ trên
=> (2.3)
Từ (2.1), (2.2), (2.3) ta xác định được dưới dạng giải
tích của các biến khớp liên hệ với điểm tác động cuối, mà
khi xác định được các biến khớp ngược lại ta tìm được các
góc cardan( Phần công thức giải tích này được kiểm chứng ở
phần mô phỏng điều khiển ).
b, Xây dựng quy luật chuyển động khâu thao tác E và giải động học ngược bằng phương pháp số Newton-Raphson.
Bài toán khi biết được xE(t), yE(t), zE(t) tại mỗi thời điểm t ta sẽ tìm được vector q=[q1, q2, q3]T tại mỗi thời điểm đó.

Ta lấy giá trị sát giá trị đầu để tiến hành quá trình lặp Newton-Raphson
Quá trình lặp dừng lại khi sai số ở lần k+1 với lần k nhỏ hơn giá trị cho phép.
Dưới đây là 1 doạn chương trình viết bằng maple sử dụng phương pháp Newton-Raphson lưu kết quả tính toán ra filetxt và 1 đoạn vẽ đồ thị từ file txt được viết bằng matlab
Với quỹ đạo điểm tác động cuối là đường thẳng có phương trình như sau
Chương trình viết bằng maple
>>>read:/ngocminh.text
>
>

>
>>>
>
>
>
>
>
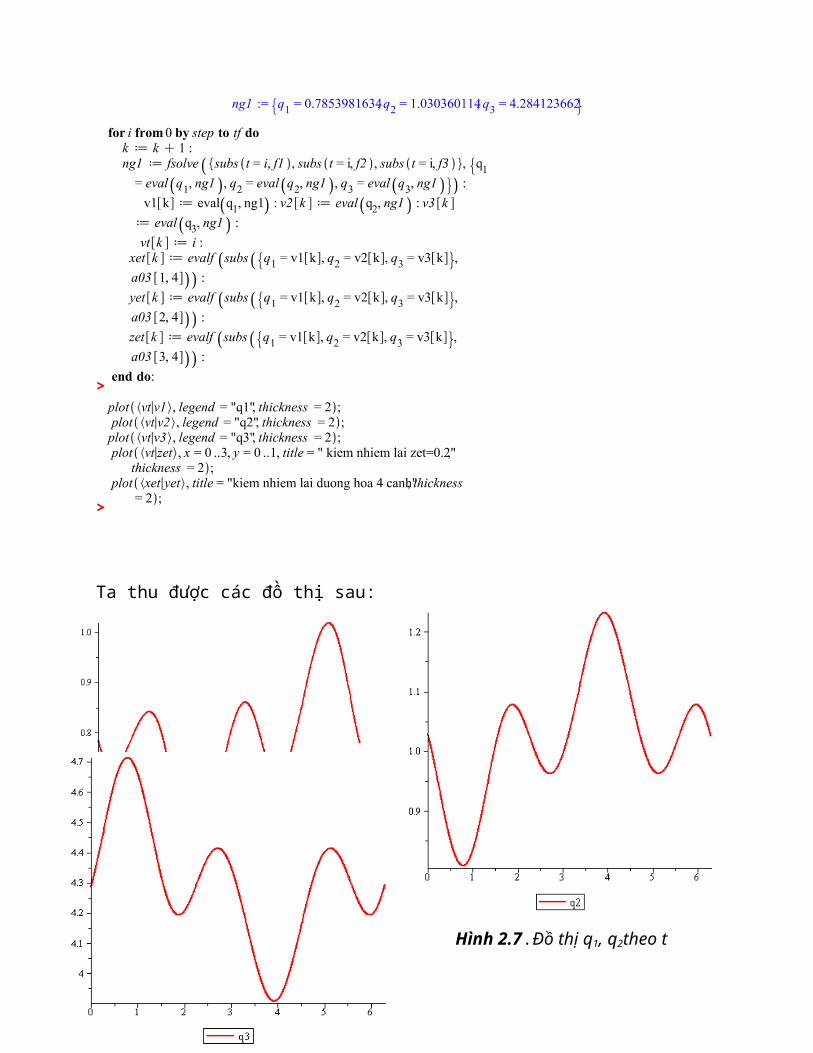
Ta thu được các đồ thị sau:
Hình 2.7.Đồ thị q1, q2theo t
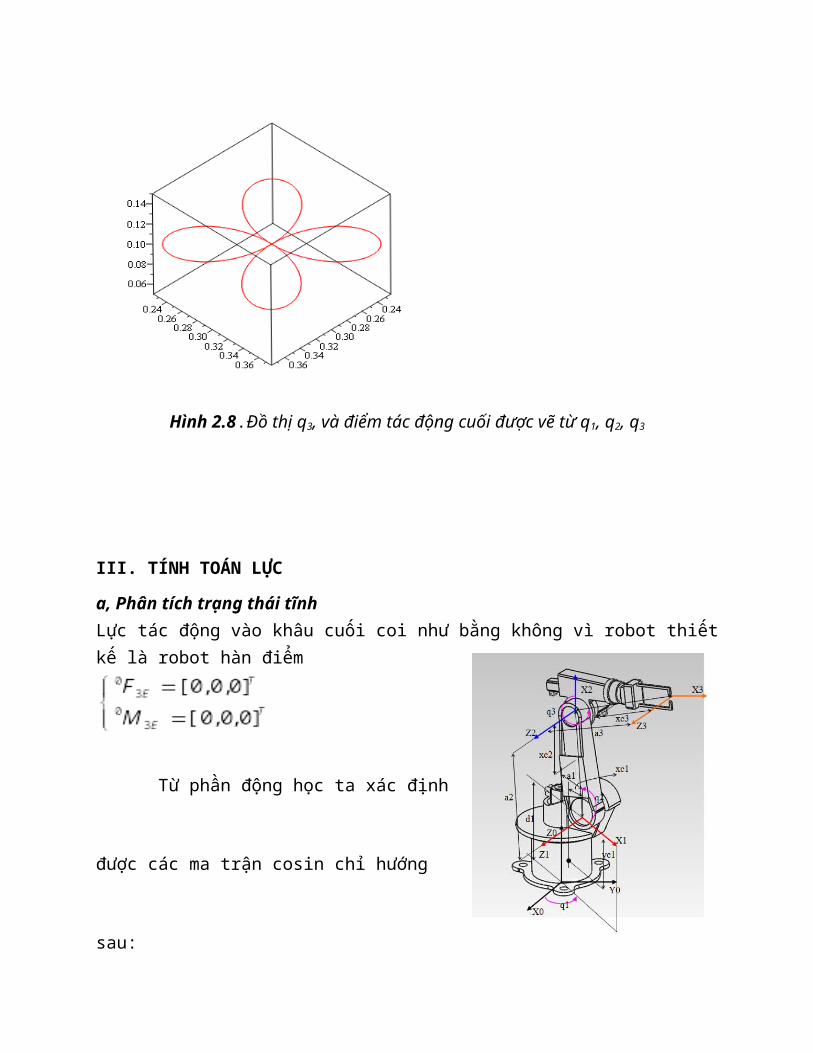
Hình 2.8.Đồ thị q3, và điểm tác động cuối được vẽ từ q1, q2, q3
III. TÍNH TOÁN LỰC
a, Phân tích trạng thái tĩnhLực tác động vào khâu cuối coi như bằng không vì robot thiếtkế là robot hàn điểm
Từ phần động học ta xác định
được các ma trận cosin chỉ hướng
sau:

= =
=
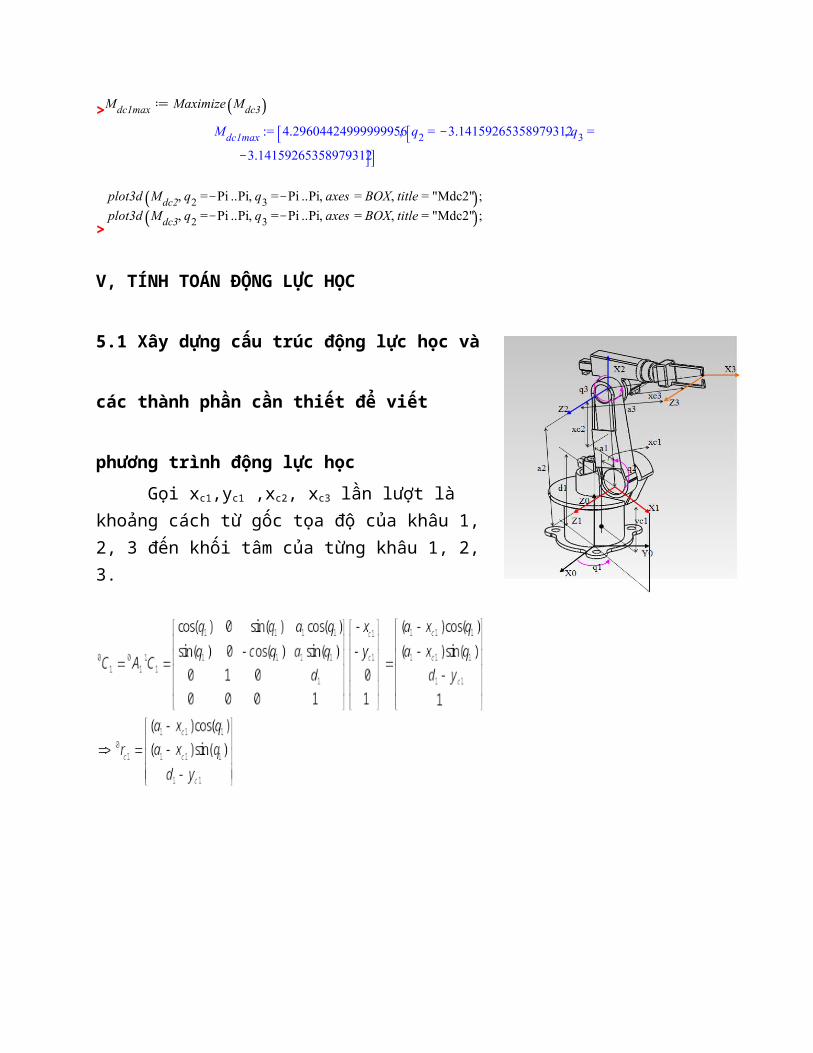
Gọi xc1,yc1 ,xc2, xc3 lần lượt là khoảng cách từ gốc tọa độ của khâu 1, 2, 3 đến khối tâm của từng khâu 1, 2, 3.
Xét khâu 3:
Thay vào công thức đã được đã được thiết lập trong bài giảng
robot
Ta tính được

Xét khâu 2 ( lấy kết quả của khâu 3 ):
Thay vào công thức:
Ta tính được: Xét khâu 1 ( lấy kết quả của khâu 2 ):
Thay vào công thức:

Ta tính được :
b, Tính toán lực/momen lớn nhất ở trạng thái tĩnh Tính các momen động cơ cần để cho robot cân bằng từ các kết quả tính toán trên :
Dể tính momen động cơ 2 ta phải chiếu vector lên tọa độ khâu 2
Dể tính momen động cơ 3 ta phải chiếu vector lên tọa độ khâu 2
Với các số liệu được thiết kế ta vẽ được đồ thị 3d Mdc2, Mdc3 phụ thuộc vào hai biến q2, q3 như sau :
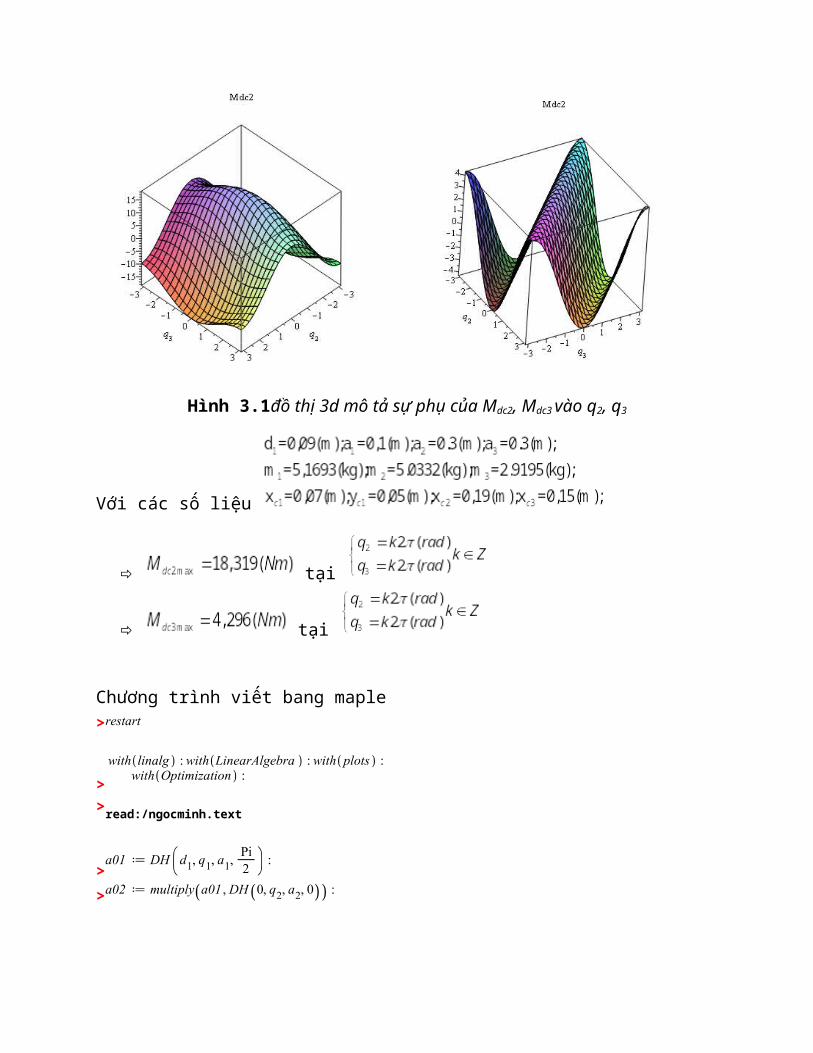
Hình 3.1đồ thị 3d mô tả sự phụ của Mdc2, Mdc3 vào q2, q3
Với các số liệu
tại
tại
Chương trình viết bang maple>
>>read:/ngocminh.text
>>
>>
>>
>
>
>>
>
>
>>
>
>>
>>
>>
>>
>
>
V, TÍNH TOÁN ĐỘNG LỰC HỌC
5.1 Xây dựng cấu trúc động lực học và
các thành phần cần thiết để viết
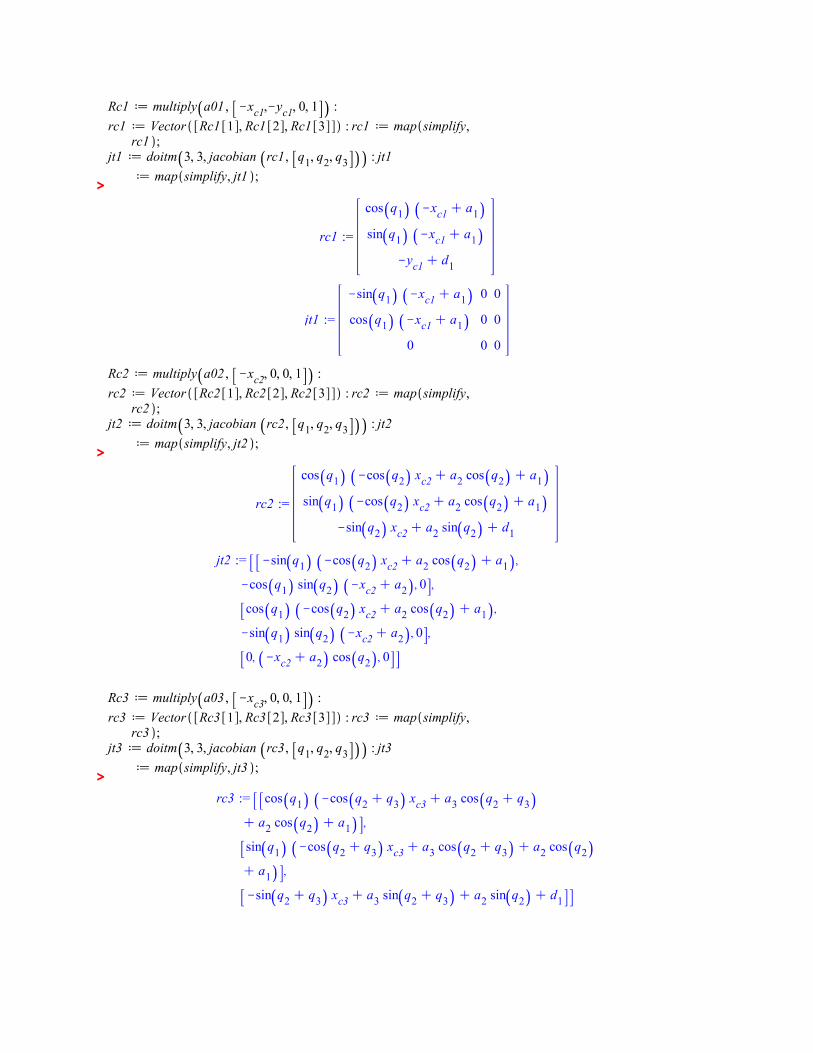
phương trình động lực học Gọi xc1,yc1 ,xc2, xc3 lần lượt làkhoảng cách từ gốc tọa độ của khâu 1,2, 3 đến khối tâm của từng khâu 1, 2,3.

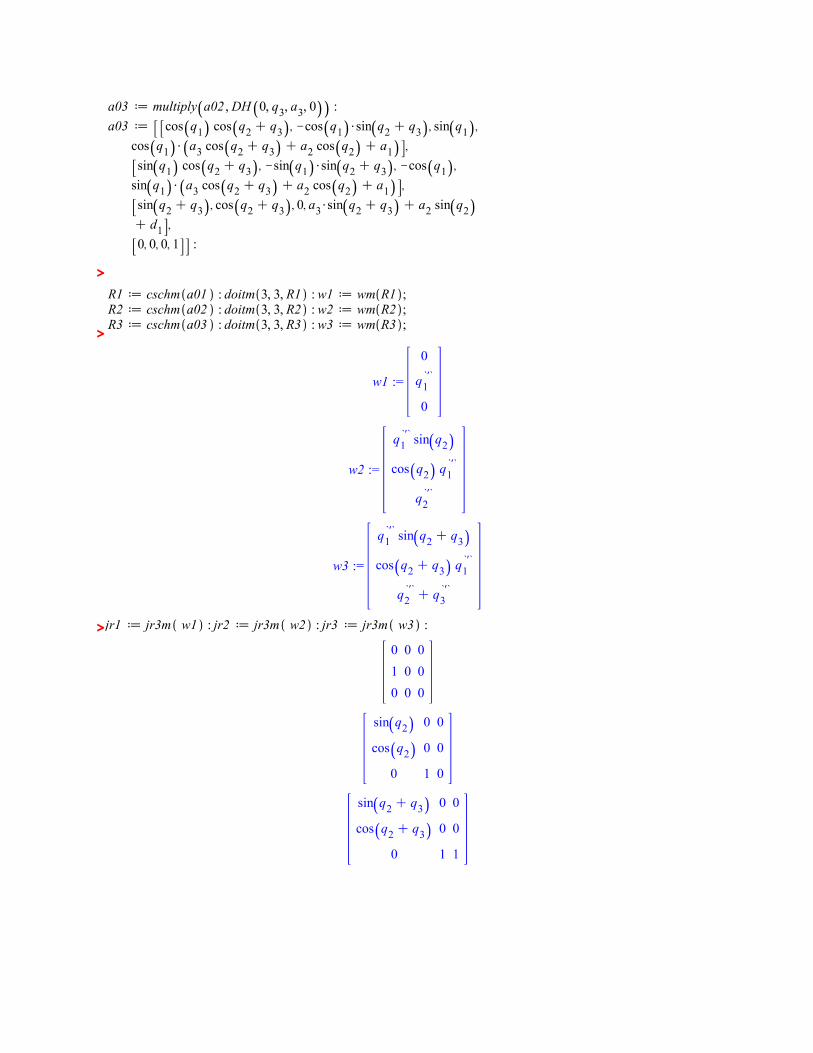
Từ các vị trí trọng tâm và vận tốc góc ta tính được
các ma trân Jacobi tịnh tiến và quay sau
,
Ma trận ten xơ quán tính củ
a hai khâu 1, 2 và 3 với trục gắn
vào khối tâm song song với hệ trục của khâu cũng tương ứng là hệ quán tính chính:
= , = , =

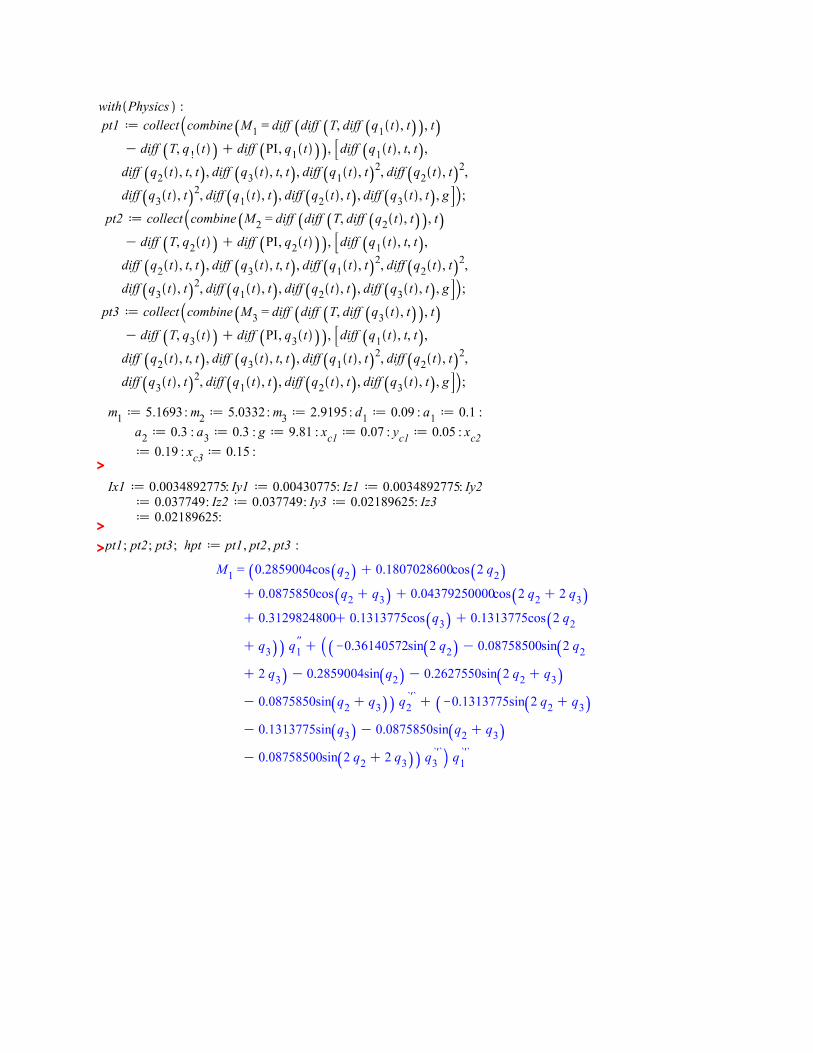
Động năng, ma trân khối lượng M(q):
Với các thành phần như sau :
Biểu thức thế năng của hệ : với go =[ 0 ,0 ,-g ]T
Công ảo của các lực suy rộng không có thế ở đây giả tại
điểm tác động cuối robot chịu 1 lực :
Vector lực suy rộng viết dạng cột được lấy từ tổng công
ảo có dang như sau:
(4.1)

Trong đó U =[U1, U2, U3]T là vector momen dẫn động, JE được tính từ phần động học JE =
5.2, Thiết lập phương trình Lagrang của robot
Chúng ta đã biết phương trình lagrang loại 2 viết từng
tọa độ suy rộng như sau:
Để tránh dài dòng ta dài dòng ta không đi chứng mình dạng ma
trận của phương trình Lagrang áp dụng luôn ( có thể tham
khảo cách chứng minh trong quyển Robot công nghiệp của GS.
TSKH. Nguyễn Văn Khang )
Từ (4.1)viết lại dạng sau :

Ta tính ma trân Clioris từ ma trận M(q) bởi công thức tính
như sau
Vector G(q) momen trọng lực tính như sau :
Như vậy phương trình vi phân chuyển động của robot cấu hình RRR không gian có dạng ma trân như sau: ta xác định được
Ma trận khối lương M(q) và ma trận quán tính clitoris C
Với các thành phần như sau :

Với các thành phần như sau :
VectorG(q) và ma trận JE(q)
Với C1=cos(q1), S1=sin(q1), C2=cos(q2), S2=sin(q2), S23=sin(q2+q3), C23=cos(q2+q3), q=[q1, q2, q3]T
Điểm tác động cuối robot chịu 1 lực :5.3Động lực học thuận Với hệ phương trình động lực học đã thiết lập, và các số liệu đã thiết kế phần cơ khí, và lực tác động khâu

cuối coi như không có ta tích phân số hệ phương trình động lực học đó lên với các momen động cơ cho trước :
Ở đây ta cho 3 momen dẫn động và các số liệu các tham số như
sau :
Ta sử dụng chương trình viết bằng maple các kết quả ở dạng đồ thị có trong chương trình :>
>>read:/ngocminh.text
>>
>
>
>
>
>
>

>
>

>
>
>
>
>>

>
>
>
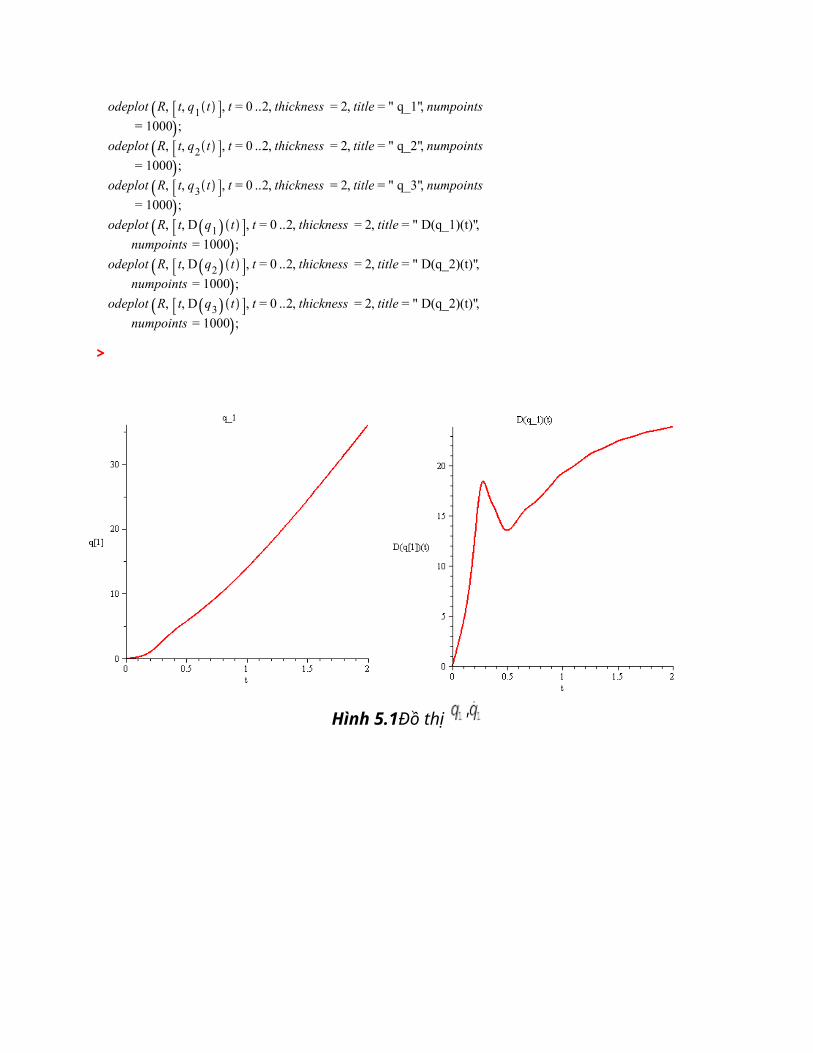
>
Hình 5.1Đồ thị
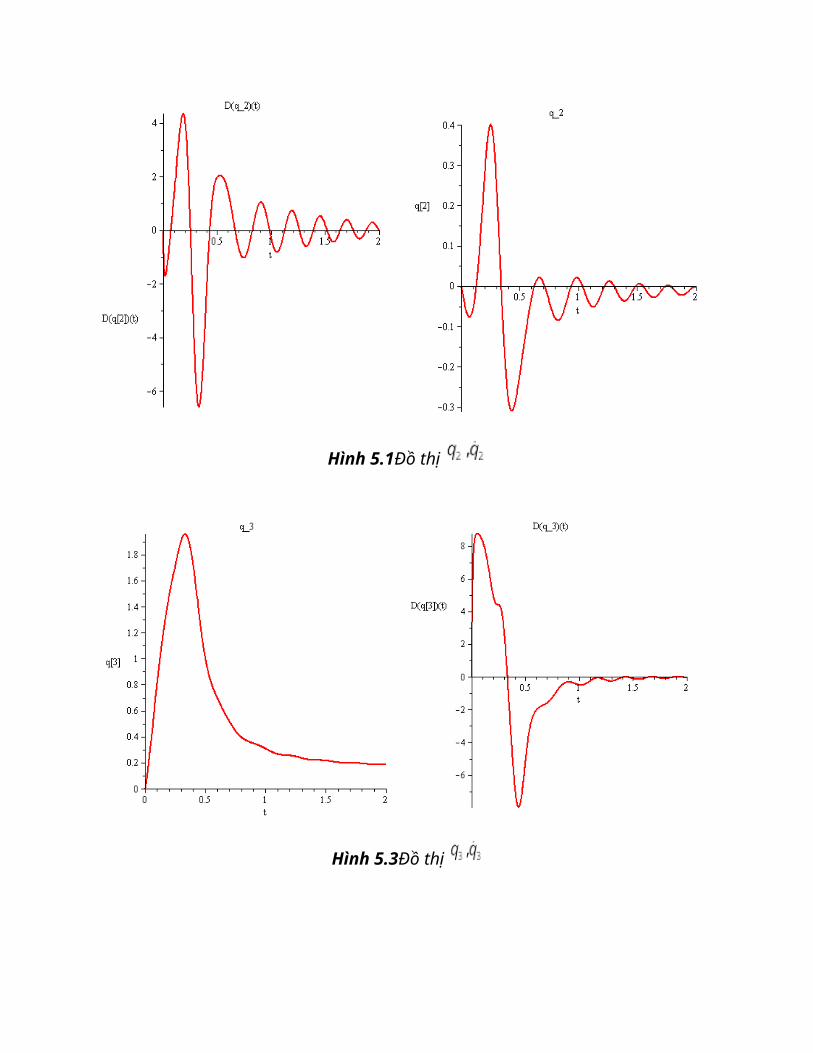
Hình 5.1Đồ thị
Hình 5.3Đồ thị

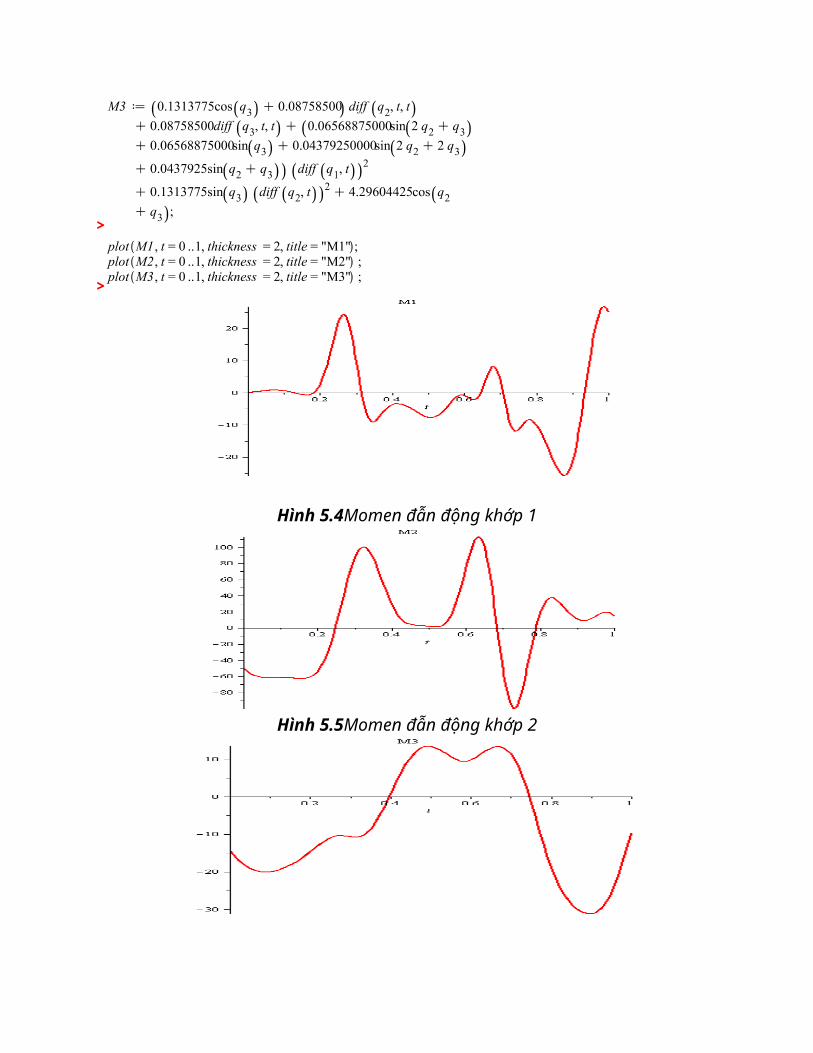
5.4 Động lực học ngược Cho quy luật 3 khớp như sau :
Ta đi tính 3 momen dẫn động từ phương trình động lực học đã thiết lập bằng chương trình maple sau :>
>
>
>
>
>
Hình 5.4Momen đẫn động khớp 1
Hình 5.5Momen đẫn động khớp 2

Hình 5.6Momen đẫn động khớp 3





























