Embed Size (px)
Citation preview
ORIGINAL PAPER
Nonlocal Frictional Effects at Indentation of Elastic Materials
Denis Jelagin • Per-Lennart Larsson
Received: 28 November 2012 / Accepted: 11 June 2013 / Published online: 20 June 2013
� Springer Science+Business Media New York 2013
Abstract Indentation of elastic materials is investigated
numerically using the finite element method. Large defor-
mation theory is relied upon for accuracy. The study
focuses on nonlocal frictional effects on relevant indenta-
tion quantities in the microindentation regime. The inden-
tation quantities investigated include both local and global
ones. It is shown that nonlocal frictional effects are small
when global quantities are at issue, as is the case when
conventional (Coulomb) theory of friction is used, also
when these features are introduced at the ridges of a
Vickers indenter where stress gradients are substantial.
These effects are, however, shown to be of importance for
particular indenter geometries as far as local field variables
are concerned.
Keywords Indentation � Elastic materials � FEM �Nonlocal friction
1 Introduction
Indentation or hardness tests, associated with names such as
Brinell, Knoop, Vickers and Berkovich, have, for a long
time, been used to characterize conventional engineering
materials, such as metals and alloys. In recent years, such
tests have received increasing attention due to the develop-
ment of new experimental devices, such as the nanoindenter
[1], enabling the determination of the material properties
from very small samples at extremely small indentation
depths. Another reason for the renewed interest in indenta-
tion testing is the fact that, for many new engineering
materials such as ceramics, a standard uniaxial test often
fails to deliver reliable results, and accordingly, indentation
is the only alternative for material characterization. Fur-
thermore, indentation is a very convenient tool for deter-
mining the material properties of thin films or strings in
ready-to-use engineering devices. The indentation can be
used to determine the constitutive and fracture resistance
properties of the material by taking advantage of results
from earlier theoretical, numerical and experimental analy-
ses by, for example, Tabor [2], Johnson [3], Storakers et al.
[4], Larsson [5], Oliver and Pharr [6] and Wilshaw [7]. An
accurate description of the effect from the specimen’s
material and interface parameters on the stress field induced
in the specimen is an essential step in the analysis of the
indentation test data. Accordingly, in the present study, the
influence of the nonlocal frictional interactions on the local
and global indentation parameters is examined theoretically
and numerically.
Most commonly, indentation testing involves both
elastic and plastic deformation. This being in particular so
at sharp indentation where the absence of a characteristic
length in the problem indicates that plasticity enters the
problem immediately at contact (the exception being
indentation of materials described by nonlocal plasticity
where a characteristic length parameter is introduced from
the constitutive equation, cf. e.g. [8]). There are, however,
quite a few situations of substantial practical importance
where results for purely elastic deformations, pertinent to
different kinds of sharp indentation, are of immediate
significance. This concerns in particular indentation of
highly elastic polymer and rubber materials, where plastic
D. Jelagin (&)
Division of Highway and Railway Engineering, Royal Institute
of Technology, 10044 Stockholm, Sweden
e-mail: [email protected]
P.-L. Larsson
Department of Solid Mechanics, Royal Institute of Technology,
100 44 Stockholm, Sweden
123
Tribol Lett (2013) 51:397–407
DOI 10.1007/s11249-013-0172-4

deformation is negligible, but also when it comes to ana-
lytical modeling of unloading at indentation. The latter
issue is of interest when indentation is used in order to
determine the elastic properties of a material, based on the
load–displacement curve at initial unloading, cf. e.g. [6].
Regardless of whether or not both elastic and/or plastic
deformation is present at sharp indentation, the relation
between normal indentation load, P, and indentation depth,
h, can always be described as
P� h2 ð1Þ
The relation (1) is valid when the dimensions of the
contact area are small compared to the dimensions of the
indented material, and no length quantity is introduced
from, for example, the constitutive equation. This means
that (1) holds at, for example, Hookean elasticity and
classical Mises plasticity. For the case of cone indentation
of an elastic half-space, Sneddon [9] derived the explicit
relationship
P ¼ 2Eh2 tanða=2Þ= pð1� m2Þ� �
ð2Þ
where E and m are Young’s modulus and Poisson’s ratio,
respectively, of the half-space and a is the included angle
of the conical indenter. Numerous related formulas for
other types of indenters and constitutive equations have
been presented, cf. e.g. [3, 10, 11], but are not shown here
for brevity.
The case of spherical indentation differ from the sharp
one by the fact that here a characteristic length is intro-
duced from the curvature of the indenter. Accordingly,
plasticity will enter into the mechanical problem in a
gradual manner with increasing load, and the initial stage is
characterized by completely elastic deformation and is
known to be well described by the famous Hertzian [12]
relation:
P ¼ 4ER1=2h3=2= 3ð1� m2Þ� �
ð3Þ
where R is the radius of the indenting sphere and otherwise
the notation is introduced above in the context of Eq. (2).
It should be noticed that the Eqs. (2) and (3) are based
on the assumption of frictionless contact between the
indenter and the material. Investigations of frictional
effects at normal indentation are quite frequent in the lit-
erature, and this includes both elastic and plastic indenta-
tion (using both blunt and sharp indenters), and other
contact problems, cf. e.g. [13–19], at Coulomb friction.
The main conclusion from these efforts is that frictional
effects are small when global indentation variables, i.e.,
indentation force, depth and the contact radii, are con-
cerned. At the same time, it has been shown both numer-
ically [14, 20] and experimentally [20, 21] that the
presence of friction may have a profound influence on the
local field variables and in particular on the maximum
tensile stress location and magnitude. As a result, taking
friction into account changes both qualitatively and quan-
titatively the predictions concerning the initiation of so-
called Hertzian fracture in brittle specimens, cf. e.g. [21,
22]. This is a practically important phenomenon, and
considerable amount of work has been done to model and
predict the initiation and growth of such types of cracks, cf.
e.g., a review paper by Lawn [23]. One of the main reasons
behind the investigations of Hertzian fracture is a need to
improve the theoretical basis for the Hertzian fracture
test—a simple way to examine strength of brittle materials,
cf. e.g. [7].
It should, however, be emphasized that all the above-
mentioned investigations are pertinent to Coulomb fric-
tion, and this is not necessarily a good description of
frictional effects, in particular at small length scales in the
context of nano- or microindentation. Instead, in such a
situation, a nonlinear description of frictional contact can
be advantageous, and it is the present intention to inves-
tigate the behavior of mechanical indentation quantities
when using such an approach. Oden and Pires [24] pre-
sented an in-depth discussion about nonlocal friction
models where they pointed out that as the contact stresses
are transferred through the junctions formed by the
deformed surfaces asperities, the frictional mechanisms
have a nonlocal character. Furthermore, as commented
upon by Oden and Pires [24], there will always exist a
small tangential displacement between the contact points
in the ‘‘stick’’ region. These tangential displacements are
governed by the local elastoplastic deformations of the
asperities and can be accounted for, at least qualitatively,
by introducing nonlocal friction formulations where a
certain amount of elastic slip is allowed in stick regions. It
has to be emphasized, however, that the nonlinear friction
model discussed above is not able to fully capture the
micromechanics of rough frictional contact; in order to do
that one rather needs to rely on an explicit multi-asperity
contact models, cf. e.g., Olofsson and Hagman [25].
Furthermore, the influence of the surface roughness on the
global and local indentation quantities cannot be descri-
bed fully through a modified friction model alone as the
presence of the asperities on the interface also affects the
indentation parameters at frictionless contacts. In fact, the
effect the surface roughness has on the contact area,
indentation load and the surface pressure distribution
received a lot of attention in the literature, cf. e.g.,
Greenwood and Williamson [26], Johnson et al. [27] and
Carbone and Bottiglione [28]. At the same time, the
frictional model proposed in [24] has an advantage of
being a relatively simple way to account for the micro-slip
phenomena in the stick region as well as for its influence
on the local and global indentation parameters. To the
author’s knowledge, these nonlocal frictional effects have
398 Tribol Lett (2013) 51:397–407
123
not been considered previously in the context of blunt or
sharp indentation testing. Accordingly, this will be
attempted presently where, for clarity and convenience
(but not out of necessity), the constitutive behavior of the
indented material is restricted to (hypo) elasticity.
A qualitative discussion is, however, also provided
regarding the effects of the nonlinear friction law on the
indentation parameters at the presence of plasticity; and
computational results are reported for spherical indenta-
tion of rigid-ideal plastic materials in order to support the
arguments.
One of the motivations for the present work is the
recently published experimental investigations by Lim and
Chaudhri [29, 30]. These authors studied cone and Vickers
indentation of five highly elastic polymers and rubber
materials and reported deviations between theory [Eqs. (1)
and (2)] and experiments in case of Vickers indentation.
Lim and Chaudhri [30] suggested that frictional effects at
the ridges of the Vickers indenter might contribute to this
deviation. Presently, nonlocal frictional effects at elastic
indentation are investigated in a general manner, and the
findings of Lim and Chaudhri [30] are then evaluated in
this context.
In the analysis, straightforward finite element calcula-
tions will be adhered to, and in particular, the commercial
finite element package ABAQUS [31] is relied upon.
Nonlocal frictional effects are introduced according to the
formulation by Zhong [32] which differs from standard
Coulomb friction by the fact that friction is not evaluated
pointwise but instead over a small area. The investigation
includes elastic indentation using both blunt (spherical) and
sharp (cone and Vickers) indenters and is based on large
deformation theory for accuracy, in particular then at sharp
indentation. Both local and global indentation quantities
are of interest, and relevant results are presented for these
features.
2 Problem Formulation and Numerical Analysis
The present analysis concerns blunt and sharp indentation
of completely elastic materials. The indenter geometries to
be investigated include a spherical (blunt) indenter, a cone
indenter (in both these cases axisymmetry prevails) and a
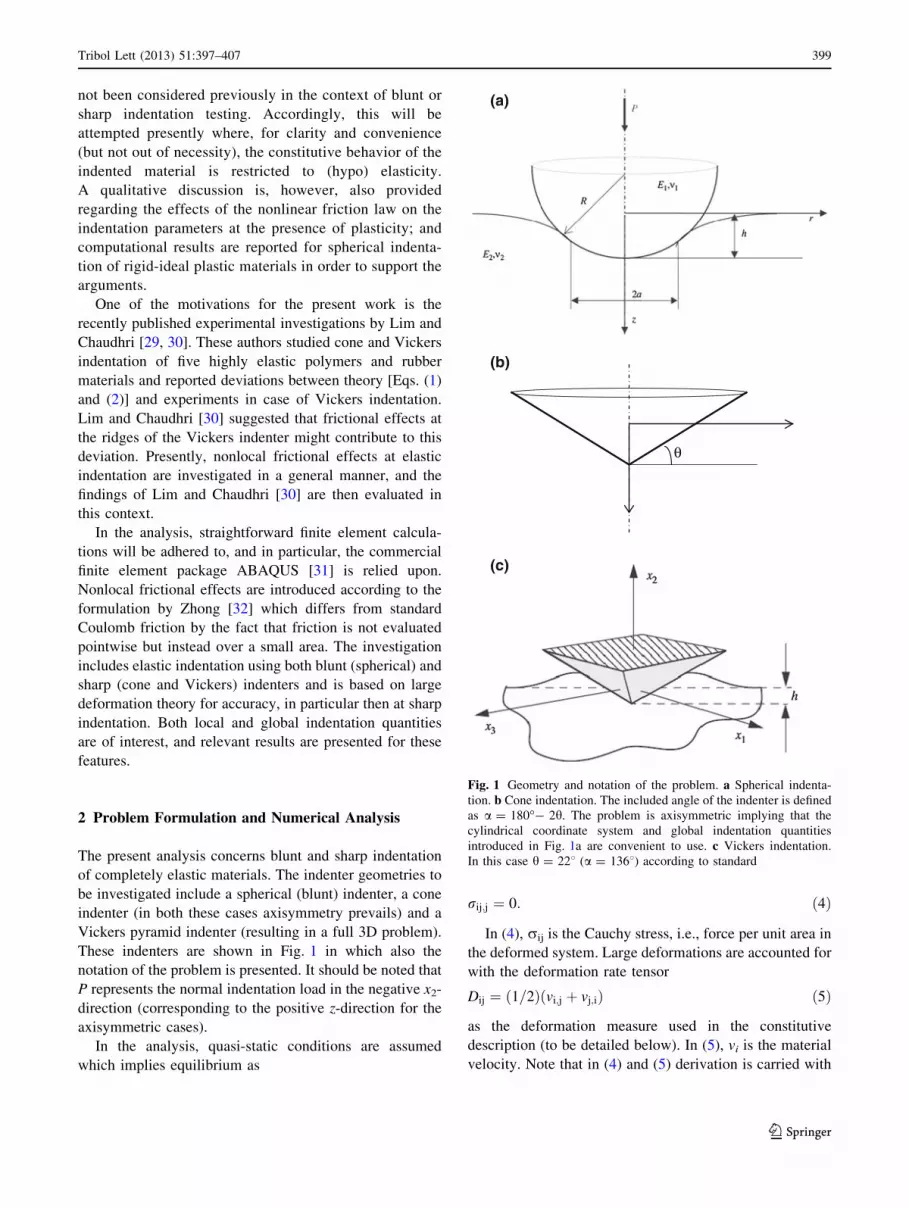
Vickers pyramid indenter (resulting in a full 3D problem).
These indenters are shown in Fig. 1 in which also the
notation of the problem is presented. It should be noted that
P represents the normal indentation load in the negative x2-
direction (corresponding to the positive z-direction for the
axisymmetric cases).
In the analysis, quasi-static conditions are assumed
which implies equilibrium as
rij;j ¼ 0: ð4Þ
In (4), rij is the Cauchy stress, i.e., force per unit area in
the deformed system. Large deformations are accounted for
with the deformation rate tensor
Dij ¼ ð1=2Þðvi;j þ vj;iÞ ð5Þ
as the deformation measure used in the constitutive
description (to be detailed below). In (5), vi is the material
velocity. Note that in (4) and (5) derivation is carried with
θ
(a)
(b)
(c)
Fig. 1 Geometry and notation of the problem. a Spherical indenta-
tion. b Cone indentation. The included angle of the indenter is defined
as a = 180�- 2h. The problem is axisymmetric implying that the
cylindrical coordinate system and global indentation quantities
introduced in Fig. 1a are convenient to use. c Vickers indentation.
In this case h = 228 (a = 1368) according to standard
Tribol Lett (2013) 51:397–407 399
123
respect to xi being the coordinates representing the current
position of a material point.
As already discussed above, Eqs. (1)-(3) are valid at
indentation problems when the dimensions of the contact
area are small compared to the dimensions of the indented
material, and no length quantity is introduced from the
constitutive equation. This is the situation of interest in the
present case. The spherical contact solution by Hertz [12],
Eq. (3), is very well known and requires no further dis-
cussion. The solution by Sneddon [9], Eq. (2) concerning
cone indentation of an elastic half-space is perhaps less
known and deserves some further explanation. In the
analysis by Sneddon [9], it is assumed that the indenter is
perfectly sharp and rigid and that a small deformation
analysis is sufficient to describe the problem. Frictional
effects are, as mentioned above, not included in the anal-
ysis. In case of Vickers indentation, any corresponding
closed-form relation does not exist as the problem, being a
complete 3D-problem, then becomes too involved to be
analyzed by analytical methods. However, Giannakopoulos
et al. [33] used large-scale finite element calculations and
dimensional analysis and curve-fitted the relation
P ¼ 2:0746ð1� 0:1655m� 0:1737m2 � 0:1862m3ÞEh2=
ð1� m2Þ:ð6Þ
The basic features pertinent to Eq. (6) are linear
elasticity, linear kinematics, frictionless contact and a
perfectly sharp and rigid indenter. A corresponding solu-
tion for a Berkovich indenter (sharp pyramid indenter with
a triangular base) was subsequently presented by Larsson
et al. [34] but is left out for brevity (the results in [33] have
also been verified by FEM studies in [35]).
As been emphasized above, the relations (2), (3) and (6)
are all pertinent to an analysis based on linear kinematics.
At elastoplastic indentation, both for spherical and sharp
indenters, it has been shown that large deformation effects
can be substantial, cf. e.g. [36–38]. At purely elastic
deformations, these effects are reported to be less signifi-
cant as, for example, Giannakopoulos et al. [33] and
Larsson et al. [34] reported differences within a few per-
cent between large deformation and small deformation
results. Still though, there are differences between the two
sets of results, and aiming at high-accuracy solutions, it
was thought advisable to include nonlinear kinematics in
the present analysis.
Above, basically only the behavior of global indentation
properties has been discussed. This is so mainly because
such relations are more easily expressed in an analytical
manner. However, as mentioned previously, field variables
are of course also of considerable importance in the present
context and will be given detailed attention. In particular,
this concerns the influence of frictional effects on tensile
stresses close to the contact boundary.
As for the constitutive specification, remembering that
large deformations were accounted for a hypoelastic for-
mulation of Hooke’s law was relied upon yielding
Mrij ¼ E=ð1þ mÞð Þ dikdjl þ m= 1� 2mð Þð Þdijdkl
� �Dkl: ð7Þ
In (7), Drij is the objective Jaumann rate of the Cauchy
stress. Furthermore, Dij is the deformation rate tensor as
specified in (5), and dij is Kronecker’s delta. The material
constants E and m, Young’s modulus and Poisson’s ratio,
respectively, have also been presented previously above.
It remains then to formulate the frictional behavior in
the present analysis. In case of standard Coulomb friction,
this approach states that no relative motion between two
surfaces occurs if
seff\lp ð8Þ
applies. In (8), the effective shear stress is defined as
seff ¼ ðs12Þ2 þ ðs23Þ2� �1=2
ð9Þ
l is the coefficient of friction and p is the contact
pressure. If
seff ¼ lp ð10Þ
relative tangential slip between the two surfaces will be
present.
The Coulomb friction model is a so-called local friction
model, i.e., it applies pointwise over the contact region. In
the present analysis, the main interest is directed toward the
mechanical behavior when nonlocal frictional effects are
considered. A simple way to introduce such effects is to
approximate the stick conditions in Eq. (10) with a stiff
elastic behavior. The elastic stiffness is then chosen in such
a way that the relative motion from the position of zero
shear stress is bounded by a value cc. Such a nonlocal
friction model was suggested by Zhong [32] and can be
considered as a Coulomb model which is not applied
pointwise but weighted over a small area. Presently then,
the influence from cc on the mechanical behavior at elastic
contact will be investigated using the commercial FEM
program ABAQUS [27] where a corresponding nonlocal
friction model is implemented (even though the main focus
then is computational efficiency, see [39]).
In the last two decades, the number of finite element
analyses of sharp indentation testing has increased enor-
mously, cf. e.g. [5, 16, 18, 33–35, 40–46] (just to mention a
few), and can now be considered as a standard method for
numerical investigation of such problems. The analyses
include both 2D and 3D problems as well as different
forms of constitutive behavior (elastic, various elastoplastic
models and many others). Accordingly, in the presentation
400 Tribol Lett (2013) 51:397–407
123
of the present numerical approach below, only the essential
details of the analysis will be discussed.
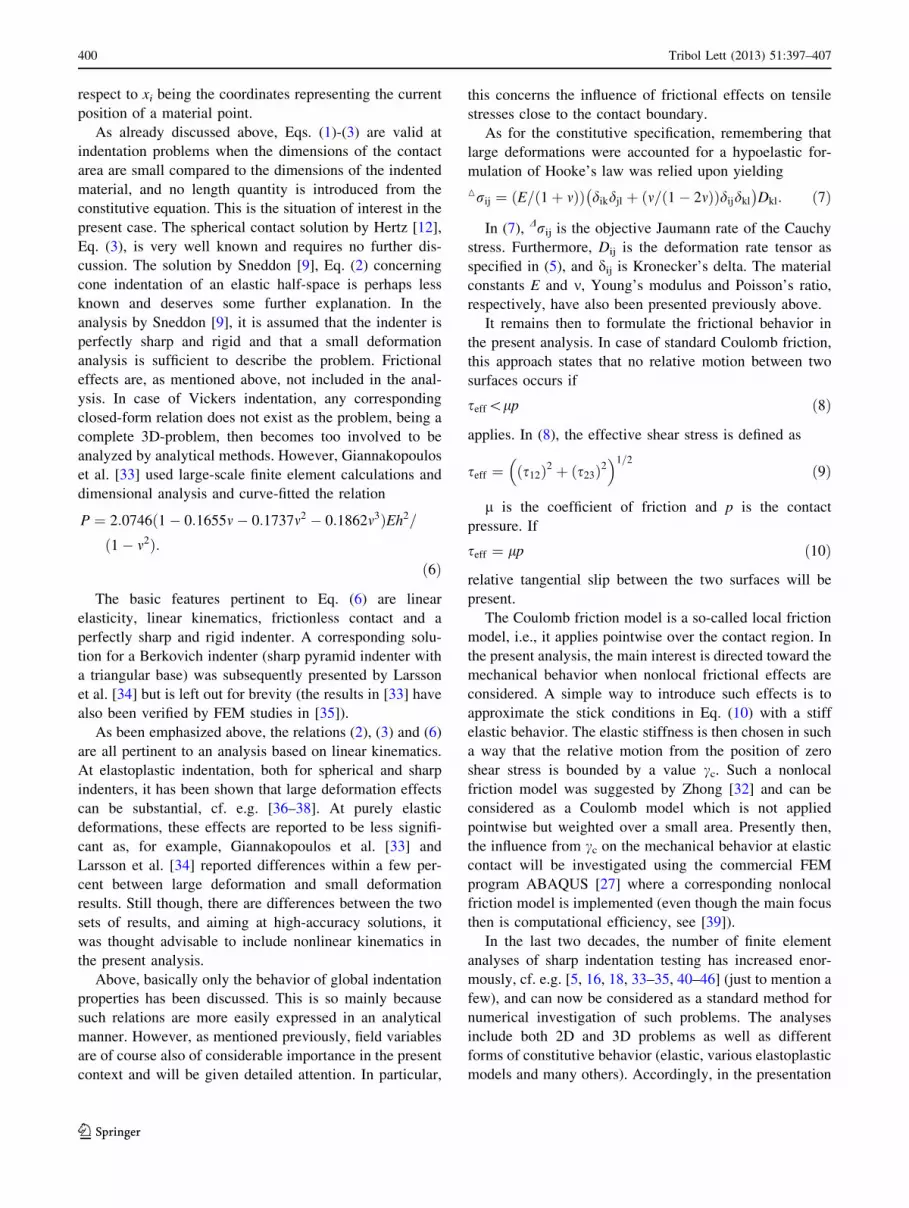
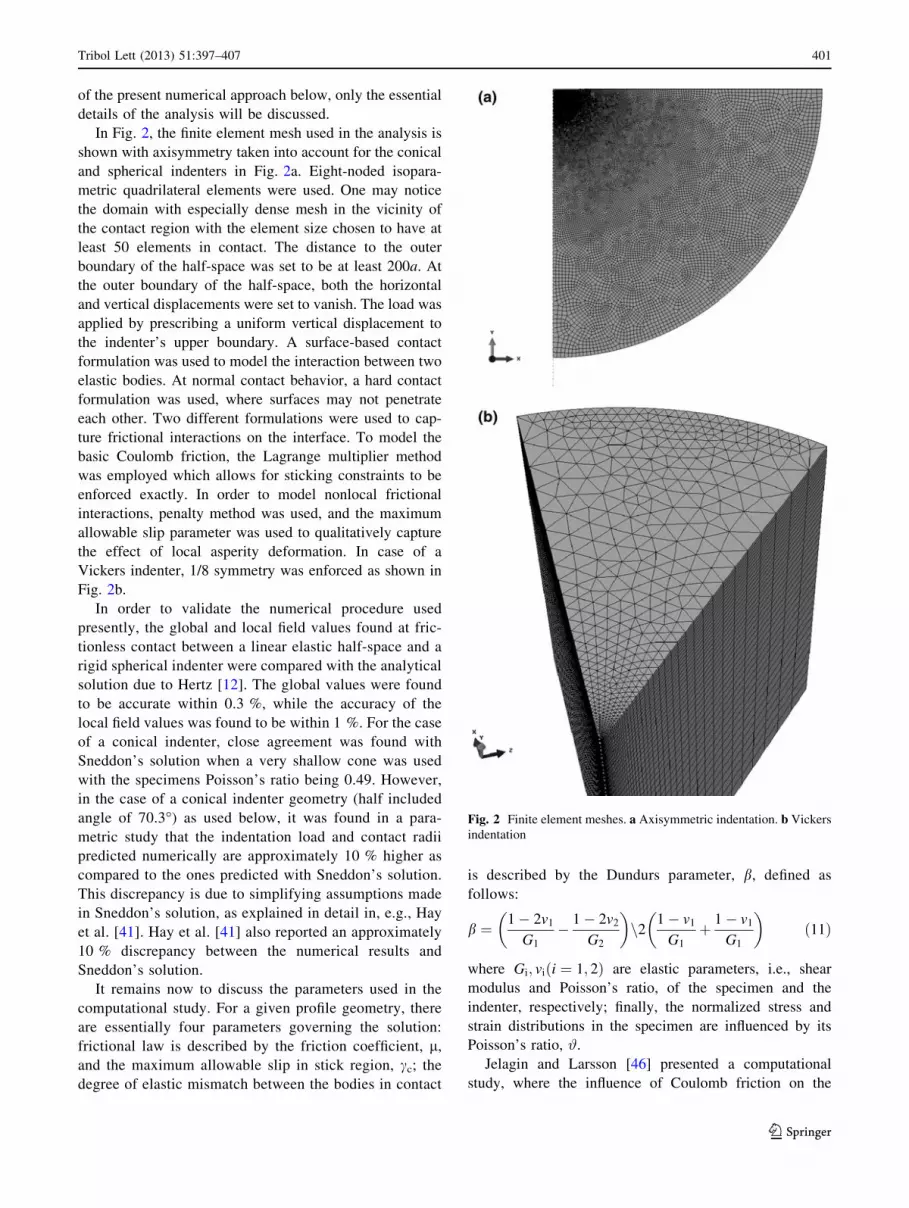
In Fig. 2, the finite element mesh used in the analysis is
shown with axisymmetry taken into account for the conical
and spherical indenters in Fig. 2a. Eight-noded isopara-
metric quadrilateral elements were used. One may notice
the domain with especially dense mesh in the vicinity of
the contact region with the element size chosen to have at
least 50 elements in contact. The distance to the outer
boundary of the half-space was set to be at least 200a. At
the outer boundary of the half-space, both the horizontal
and vertical displacements were set to vanish. The load was
applied by prescribing a uniform vertical displacement to
the indenter’s upper boundary. A surface-based contact
formulation was used to model the interaction between two
elastic bodies. At normal contact behavior, a hard contact
formulation was used, where surfaces may not penetrate
each other. Two different formulations were used to cap-
ture frictional interactions on the interface. To model the
basic Coulomb friction, the Lagrange multiplier method
was employed which allows for sticking constraints to be
enforced exactly. In order to model nonlocal frictional
interactions, penalty method was used, and the maximum
allowable slip parameter was used to qualitatively capture
the effect of local asperity deformation. In case of a
Vickers indenter, 1/8 symmetry was enforced as shown in
Fig. 2b.
In order to validate the numerical procedure used
presently, the global and local field values found at fric-
tionless contact between a linear elastic half-space and a
rigid spherical indenter were compared with the analytical
solution due to Hertz [12]. The global values were found
to be accurate within 0.3 %, while the accuracy of the
local field values was found to be within 1 %. For the case
of a conical indenter, close agreement was found with
Sneddon’s solution when a very shallow cone was used
with the specimens Poisson’s ratio being 0.49. However,
in the case of a conical indenter geometry (half included
angle of 70.3�) as used below, it was found in a para-
metric study that the indentation load and contact radii
predicted numerically are approximately 10 % higher as
compared to the ones predicted with Sneddon’s solution.
This discrepancy is due to simplifying assumptions made
in Sneddon’s solution, as explained in detail in, e.g., Hay
et al. [41]. Hay et al. [41] also reported an approximately
10 % discrepancy between the numerical results and
Sneddon’s solution.
It remains now to discuss the parameters used in the
computational study. For a given profile geometry, there
are essentially four parameters governing the solution:
frictional law is described by the friction coefficient, l,
and the maximum allowable slip in stick region, cc; the
degree of elastic mismatch between the bodies in contact
is described by the Dundurs parameter, b, defined as
follows:
b ¼ 1� 2v1
G1
� 1� 2v2
G2
� �n2 1� v1
G1
þ 1� v1
G1
� �ð11Þ
where Gi; viði ¼ 1; 2Þ are elastic parameters, i.e., shear
modulus and Poisson’s ratio, of the specimen and the
indenter, respectively; finally, the normalized stress and
strain distributions in the specimen are influenced by its
Poisson’s ratio, #.
Jelagin and Larsson [46] presented a computational
study, where the influence of Coulomb friction on the
Fig. 2 Finite element meshes. a Axisymmetric indentation. b Vickers
indentation
Tribol Lett (2013) 51:397–407 401
123
Hertzian fracture initiation has been investigated for a
range of # and b values. In their study, the impact of
friction was found to be most profound at low specimens
Poisson’s ratio combined with the high b values as these
material combinations result in the highest tendency for
relative tangential slip between the bodies in contact.
Based on the results presented in [46], it was decided in the
present study to investigate the effect of nonlocal friction
for the case of a specimen with v ¼ 0:2 (corresponding to,
e.g., concrete or glass specimen) in contact with a rigid
indenter ðb ¼ 0:375Þ. The friction coefficient, l, has been
varied between 0 and 0.4. The magnitude of the maximum
allowable elastic slip in the stick region is, according to
Oden and Pires [24], related to the surface roughness and
the local mechanical properties of the materials in contact.
In order to cover a wide range of the possible cc values, in
the present study, the simulations have been performed
with cc=h ¼ 0; 0:1; 1. It should be clearly stated though that
pertinent experimental studies, devoted toward a consistent
physical understanding of the cc-parameter, cannot be
found in the literature. A certain quantitative guideline may
be obtained from Hagman and Olofsson [47] study where
the maximum amount of micro-slip (i.e., amount of tan-
gential displacement in the macro stick regime) has been
estimated numerically and measured experimentally for
steel and brass contact pairs at combined normal and tan-
gential loading. Based on the model with uniformly dis-
tributed ellipsoidal elastic asperities, Hagman and Olofsson
[47] predict the maximum elastic micro-slip in the stick
region to be in the range of approximately 0.2–0.5 lm.
Their experimental observations, however, indicate that the
model they use underestimates the amount of micro-slip,
which according to the authors may be due to the plastic
deformation of the asperities. As the micro-slip magnitudes
for pure normal loading contacts are not reported in the
literature, the present study is definitely directed toward a
qualitative, and not quantitative, understanding of the
influence from nonlocal frictional effects. cc=h ¼ 1 is
certainly a high value on a parameter related to surface
roughness, and it is therefore believed that the parameter
study conducted presently is covering the most significant
effects related to nonlocal friction. Having said this though,
it may be expected based on the results given in [47] that in
most situations of practical importance, cc will not exceed
several micrometers in magnitude and thus high values of
cc=h may be expected only at indentation done at micro-
and nano length scales.
3 Results and Discussion
Below, the numerical results will be presented and dis-
cussed. It deserves to mention once again, as also stated
above, that all results are pertinent to a value on Poisson’s
ratio being v ¼ 0:2 and a value on Dundurs parameter
being b ¼ 0:375. Furthermore, the friction coefficient, l,
has been varied between 0 and 0.4 and the allowable elastic
slip, cc, was given the values cc=h ¼ 0; 0:1; 1. It should be
emphasized in this context that cc=h ¼ 0 corresponds to
standard Coulomb friction with no nonlocal effects. The
results below are pertinent to the three different indenter
geometries shown in Fig. 1 (spherical indentation, cone
indentation and Vickers indentation).
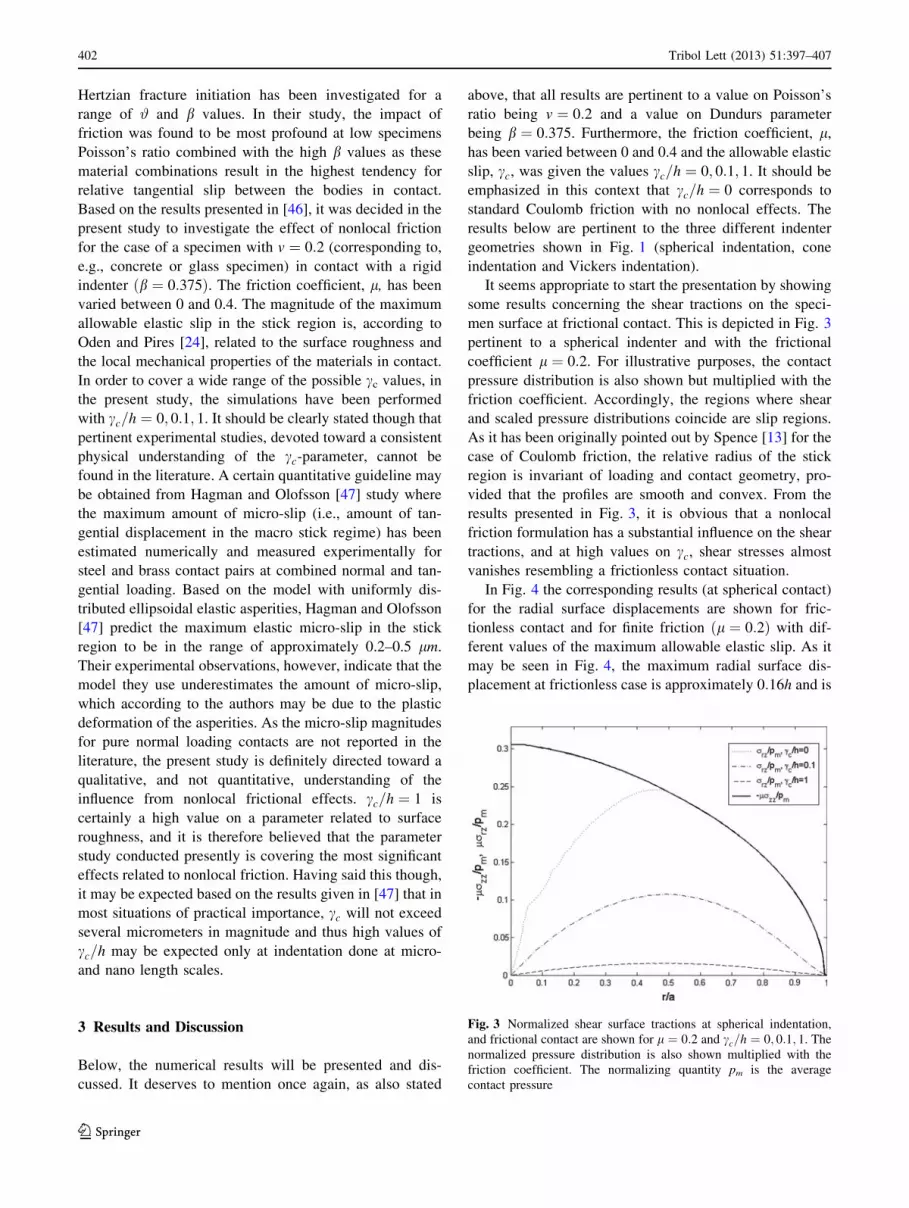
It seems appropriate to start the presentation by showing
some results concerning the shear tractions on the speci-
men surface at frictional contact. This is depicted in Fig. 3
pertinent to a spherical indenter and with the frictional
coefficient l ¼ 0:2. For illustrative purposes, the contact
pressure distribution is also shown but multiplied with the
friction coefficient. Accordingly, the regions where shear
and scaled pressure distributions coincide are slip regions.
As it has been originally pointed out by Spence [13] for the
case of Coulomb friction, the relative radius of the stick
region is invariant of loading and contact geometry, pro-
vided that the profiles are smooth and convex. From the
results presented in Fig. 3, it is obvious that a nonlocal
friction formulation has a substantial influence on the shear
tractions, and at high values on cc, shear stresses almost
vanishes resembling a frictionless contact situation.
In Fig. 4 the corresponding results (at spherical contact)
for the radial surface displacements are shown for fric-
tionless contact and for finite friction ðl ¼ 0:2Þ with dif-
ferent values of the maximum allowable elastic slip. As it
may be seen in Fig. 4, the maximum radial surface dis-
placement at frictionless case is approximately 0:16h and is
Fig. 3 Normalized shear surface tractions at spherical indentation,
and frictional contact are shown for l ¼ 0:2 and cc=h ¼ 0; 0:1; 1. The
normalized pressure distribution is also shown multiplied with the
friction coefficient. The normalizing quantity pm is the average
contact pressure
402 Tribol Lett (2013) 51:397–407
123
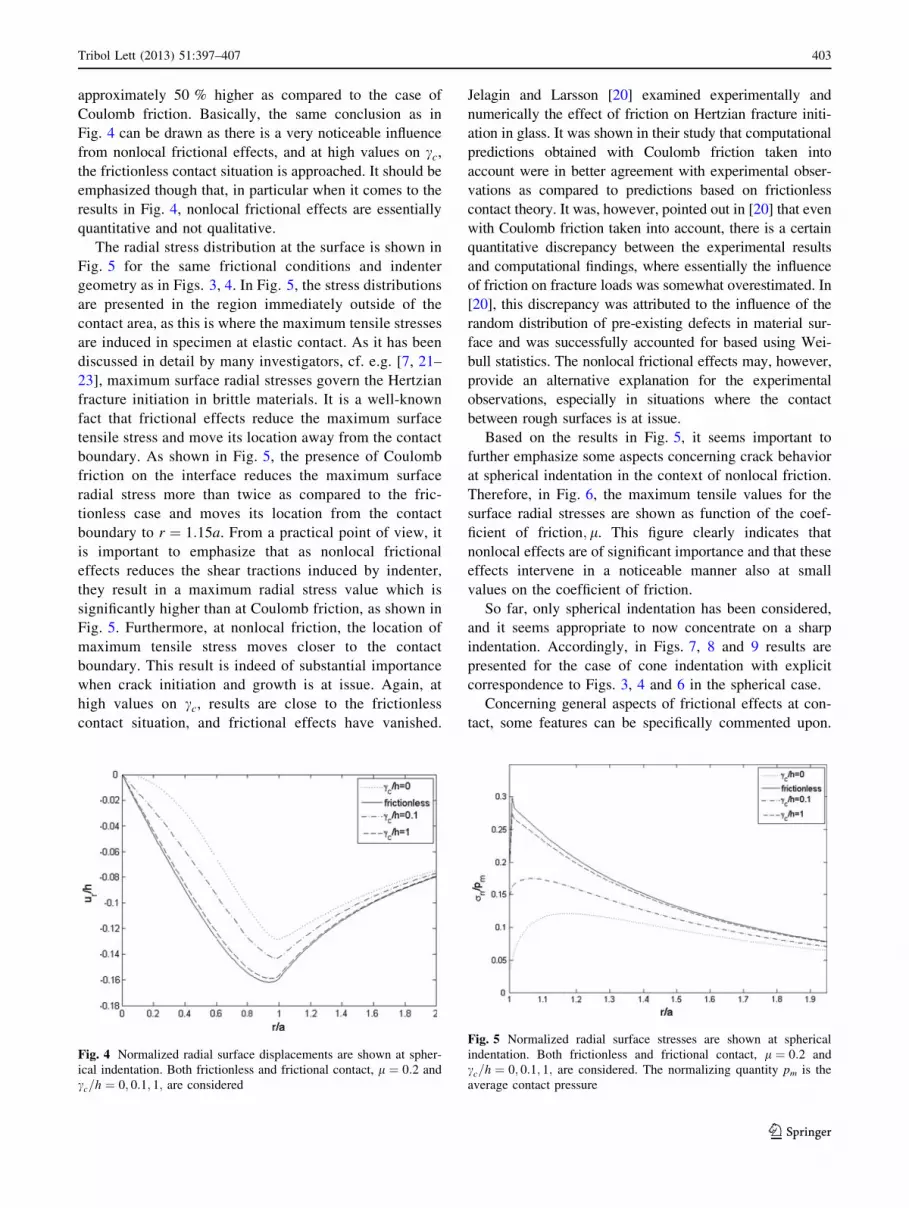
approximately 50 % higher as compared to the case of
Coulomb friction. Basically, the same conclusion as in
Fig. 4 can be drawn as there is a very noticeable influence
from nonlocal frictional effects, and at high values on cc,
the frictionless contact situation is approached. It should be
emphasized though that, in particular when it comes to the
results in Fig. 4, nonlocal frictional effects are essentially
quantitative and not qualitative.
The radial stress distribution at the surface is shown in
Fig. 5 for the same frictional conditions and indenter
geometry as in Figs. 3, 4. In Fig. 5, the stress distributions
are presented in the region immediately outside of the
contact area, as this is where the maximum tensile stresses
are induced in specimen at elastic contact. As it has been
discussed in detail by many investigators, cf. e.g. [7, 21–
23], maximum surface radial stresses govern the Hertzian
fracture initiation in brittle materials. It is a well-known
fact that frictional effects reduce the maximum surface
tensile stress and move its location away from the contact
boundary. As shown in Fig. 5, the presence of Coulomb
friction on the interface reduces the maximum surface
radial stress more than twice as compared to the fric-
tionless case and moves its location from the contact
boundary to r ¼ 1:15a. From a practical point of view, it
is important to emphasize that as nonlocal frictional
effects reduces the shear tractions induced by indenter,
they result in a maximum radial stress value which is
significantly higher than at Coulomb friction, as shown in
Fig. 5. Furthermore, at nonlocal friction, the location of
maximum tensile stress moves closer to the contact
boundary. This result is indeed of substantial importance
when crack initiation and growth is at issue. Again, at
high values on cc, results are close to the frictionless
contact situation, and frictional effects have vanished.
Jelagin and Larsson [20] examined experimentally and
numerically the effect of friction on Hertzian fracture initi-
ation in glass. It was shown in their study that computational
predictions obtained with Coulomb friction taken into
account were in better agreement with experimental obser-
vations as compared to predictions based on frictionless
contact theory. It was, however, pointed out in [20] that even
with Coulomb friction taken into account, there is a certain
quantitative discrepancy between the experimental results
and computational findings, where essentially the influence
of friction on fracture loads was somewhat overestimated. In
[20], this discrepancy was attributed to the influence of the
random distribution of pre-existing defects in material sur-
face and was successfully accounted for based using Wei-
bull statistics. The nonlocal frictional effects may, however,
provide an alternative explanation for the experimental
observations, especially in situations where the contact
between rough surfaces is at issue.
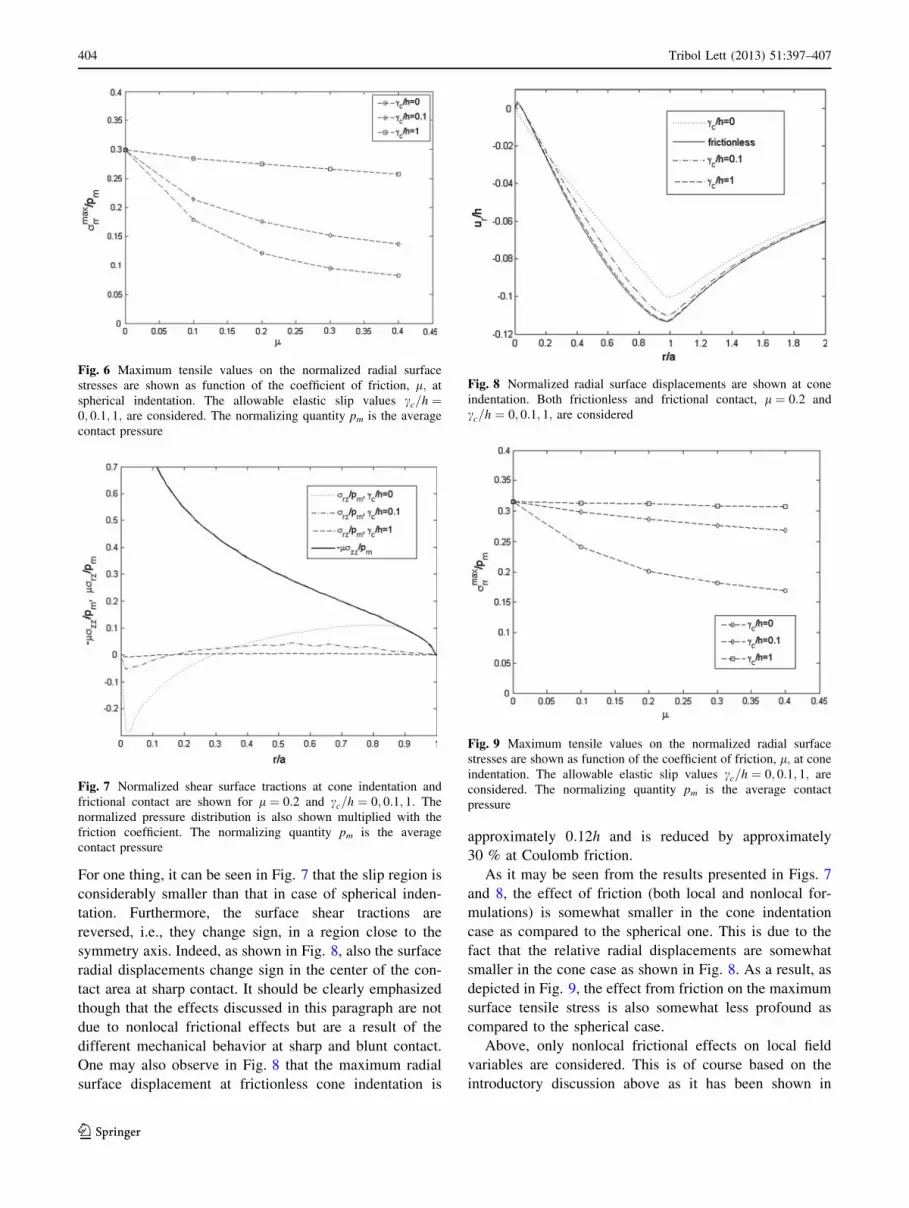
Based on the results in Fig. 5, it seems important to
further emphasize some aspects concerning crack behavior
at spherical indentation in the context of nonlocal friction.
Therefore, in Fig. 6, the maximum tensile values for the
surface radial stresses are shown as function of the coef-
ficient of friction; l. This figure clearly indicates that
nonlocal effects are of significant importance and that these
effects intervene in a noticeable manner also at small
values on the coefficient of friction.
So far, only spherical indentation has been considered,
and it seems appropriate to now concentrate on a sharp
indentation. Accordingly, in Figs. 7, 8 and 9 results are
presented for the case of cone indentation with explicit
correspondence to Figs. 3, 4 and 6 in the spherical case.
Concerning general aspects of frictional effects at con-
tact, some features can be specifically commented upon.
Fig. 4 Normalized radial surface displacements are shown at spher-
ical indentation. Both frictionless and frictional contact, l ¼ 0:2 and
cc=h ¼ 0; 0:1; 1; are considered
Fig. 5 Normalized radial surface stresses are shown at spherical
indentation. Both frictionless and frictional contact, l ¼ 0:2 and
cc=h ¼ 0; 0:1; 1; are considered. The normalizing quantity pm is the
average contact pressure
Tribol Lett (2013) 51:397–407 403
123
For one thing, it can be seen in Fig. 7 that the slip region is
considerably smaller than that in case of spherical inden-
tation. Furthermore, the surface shear tractions are
reversed, i.e., they change sign, in a region close to the
symmetry axis. Indeed, as shown in Fig. 8, also the surface
radial displacements change sign in the center of the con-
tact area at sharp contact. It should be clearly emphasized
though that the effects discussed in this paragraph are not
due to nonlocal frictional effects but are a result of the
different mechanical behavior at sharp and blunt contact.
One may also observe in Fig. 8 that the maximum radial
surface displacement at frictionless cone indentation is
approximately 0:12h and is reduced by approximately
30 % at Coulomb friction.
As it may be seen from the results presented in Figs. 7
and 8, the effect of friction (both local and nonlocal for-
mulations) is somewhat smaller in the cone indentation
case as compared to the spherical one. This is due to the
fact that the relative radial displacements are somewhat
smaller in the cone case as shown in Fig. 8. As a result, as
depicted in Fig. 9, the effect from friction on the maximum
surface tensile stress is also somewhat less profound as
compared to the spherical case.
Above, only nonlocal frictional effects on local field
variables are considered. This is of course based on the
introductory discussion above as it has been shown in
Fig. 6 Maximum tensile values on the normalized radial surface
stresses are shown as function of the coefficient of friction, l; at
spherical indentation. The allowable elastic slip values cc=h ¼0; 0:1; 1; are considered. The normalizing quantity pm is the average
contact pressure
Fig. 7 Normalized shear surface tractions at cone indentation and
frictional contact are shown for l ¼ 0:2 and cc=h ¼ 0; 0:1; 1: The
normalized pressure distribution is also shown multiplied with the
friction coefficient. The normalizing quantity pm is the average
contact pressure
Fig. 8 Normalized radial surface displacements are shown at cone
indentation. Both frictionless and frictional contact, l ¼ 0:2 and
cc=h ¼ 0; 0:1; 1; are considered
Fig. 9 Maximum tensile values on the normalized radial surface
stresses are shown as function of the coefficient of friction, l; at cone
indentation. The allowable elastic slip values cc=h ¼ 0; 0:1; 1; are
considered. The normalizing quantity pm is the average contact
pressure
404 Tribol Lett (2013) 51:397–407
123
numerous studies and articles, cf. e.g. [13–19], that friction
does not have a noticeable effect on global contact
(indentation) properties. This result was presently con-
firmed, also when nonlocal frictional effects were
accounted for, as essentially no influence from friction at
all was found on the explicit values of the global inden-
tation quantities.
The conclusion just above also proved to be valid for
Vickers indentation. For brevity, no explicit results are
presented for this particular indenter geometry. In short
though, when it comes to, for example, the influence from
friction on local indentation quantities, Vickers indentation
results showed the same features as the corresponding
results for the axisymmetric indenters discussed in Figs. 3,
4, 5, 6, 7, 8 and 9.
It should be emphasized that the fact that there are no
influence from friction on global indentation properties is
particularly noticeable at elastic contact. At elastoplastic
deformation, friction can be of more interest, also when it
comes to global properties, cf. e.g., Carlsson et al. [17]. As
it is shown in [17] for the case of classical Coulomb fric-
tion, the presence of friction may alter the global inden-
tation parameters (i.e., mean pressure and the contact
radius) at rigid-ideally plastic deformations. In particular,
as reported in [17] for the limiting case of full adhesion, the
mean pressure is approximately 5 % higher and the contact
radii is approximately 5 % lower as compared to the ones
predicted in case of frictionless indentation. The influence
of Coulomb friction on surface radial and circumferential
stress components was found in [17] to be very substantial.
Namely, while at frictionless contact, both stress compo-
nents were compressive at rigid-ideally plastic indentation;
the presence of finite friction introduced a certain amount
of localized tension in both the radial and the circumfer-
ential direction.
Based on the results presented in Figs. 3, 4, 5, 6, 7, 8 and
9, the nonlocal frictional effects may be expected to result
in a response which lies between the ones predicted for the
Coulomb friction and the frictionless cases also in a rigid-
perfectly plastic situation. In order to confirm this, the
following computational study has been performed pres-
ently: the contact pair of spherical indenter and flat spec-
imen with parameters outlined above has been used to
model frictional indentation at rigid-perfectly plastic con-
ditions, the coefficient of friction, l was set to 0 and 0.4,
and at the presence of finite friction, the simulations have
been performed at cc=h ¼ 0; 1. Johnson [48] introduced a
parameter
K ¼ Ea
2ð1� v2ÞryRð12Þ
where ry is the flow stress at strain magnitude ey ¼0:4a=2R. Johnson [48] concluded that at K� 30, elastic
effects are negligible. In order to satisfy this condition, the
flow stress for the perfectly plastic material was set pres-
ently to ry ¼ 47MPa. Similarly to observations reported in
[17], it has been presently observed that the presence of
finite Coulomb friction results in smaller contact radius and
higher mean pressure as compared to the frictionless case.
Namely, the ratios between the contact area radii found at
the frictionless case and at finite friction areal¼0
al¼0:4¼ 1:02
andal¼0
al¼0:4¼ 1:01 for cc=h ¼ 0; 1 correspondingly. The
ratios for mean pressures were found to be pl¼0m
pl¼0:4m
¼ 0:97 and
pl¼0m
pl¼0:4m
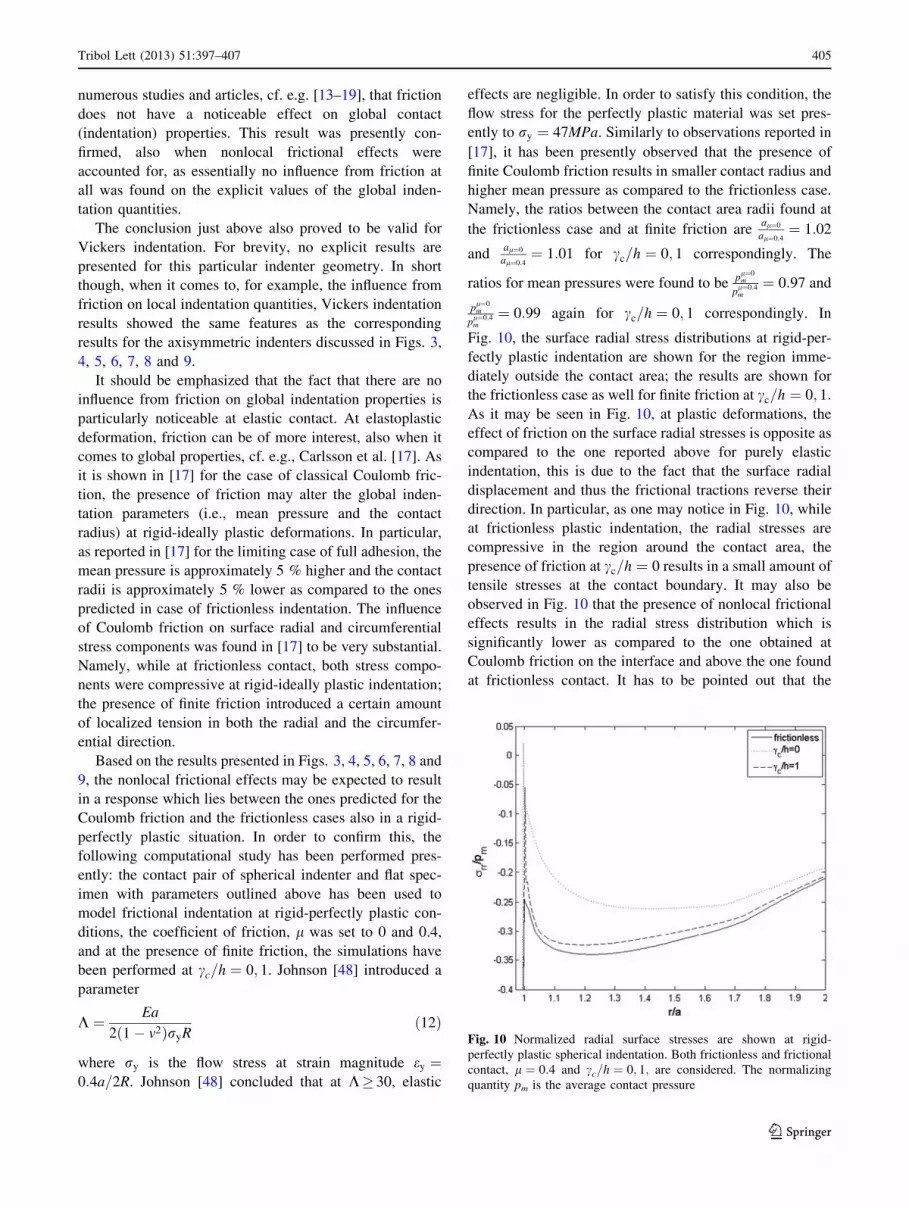
¼ 0:99 again for cc=h ¼ 0; 1 correspondingly. In
Fig. 10, the surface radial stress distributions at rigid-per-
fectly plastic indentation are shown for the region imme-
diately outside the contact area; the results are shown for
the frictionless case as well for finite friction at cc=h ¼ 0; 1:
As it may be seen in Fig. 10, at plastic deformations, the
effect of friction on the surface radial stresses is opposite as
compared to the one reported above for purely elastic
indentation, this is due to the fact that the surface radial
displacement and thus the frictional tractions reverse their
direction. In particular, as one may notice in Fig. 10, while
at frictionless plastic indentation, the radial stresses are
compressive in the region around the contact area, the
presence of friction at cc=h ¼ 0 results in a small amount of
tensile stresses at the contact boundary. It may also be
observed in Fig. 10 that the presence of nonlocal frictional
effects results in the radial stress distribution which is
significantly lower as compared to the one obtained at
Coulomb friction on the interface and above the one found
at frictionless contact. It has to be pointed out that the
Fig. 10 Normalized radial surface stresses are shown at rigid-
perfectly plastic spherical indentation. Both frictionless and frictional
contact, l ¼ 0:4 and cc=h ¼ 0; 1; are considered. The normalizing
quantity pm is the average contact pressure
Tribol Lett (2013) 51:397–407 405
123
nonlocal friction effect on the surface radial stress illus-
trated in Fig. 10 is also qualitative, i.e., in contrast to the
Coulomb friction case, the radial stresses are compressive
everywhere at the specimen surface.
It may be concluded that the results presented above
indicate that the nonlocal frictional effects play a signifi-
cant role for the indentation response of materials in the
plastic regime. A thorough investigation of these effects
lies, however, beyond the framework of the present study
but will be undertaken in the future. One practical example
where a good understanding of frictional effects at com-
bined elastoplastic deformation is of significant importance
concerns the determination of residual stresses by inden-
tation testing, cf. e.g., Eriksson et al. [45]. Such a proce-
dure is most often carried out at the microindentation level
where nonlocal frictional effect can be very relevant.
4 Conclusions
Nonlocal frictional effects at elastic contact have been
studied. The main conclusions can be summarized as
follows:
• Frictional effects, local as well as nonlocal, have very
little influence on global indentation (contact) quantities.
• Nonlocal frictional effects on local field variables can
be substantial at blunt (spherical) contact
• Nonlocal frictional effects are of less importance at
sharp contact. Most often, frictionless contact results
are valid even at small values on the allowable elastic
slip parameter in a nonlocal frictional model.
• Nonlocal frictional effects will increase the maximum
tensile stresses (in comparison with corresponding
values given by an analysis based on Coulomb friction)
at the contact boundary.
It is suggested that future studies regarding this subject
should include plastic deformation in the analysis.
References
1. Pethica, J.B., Hutchings, R., Oliver, W.C.: Hardness measure-
ments at penetration depths as small as 20 nm. Phil. Mag. A48,
593–606 (1983)
2. Tabor, D.: Hardness of Metals. Cambridge University Press,
Cambridge (1951)
3. Johnson, K.L.: The correlation of indentation experiments.
J. Mech. Phys. Solids 18, 115–126 (1970)
4. Storakers, B., Biwa, S., Larsson, P.L.: Similarity analysis of
inelastic contact. Int. J. Solids Struct. 34, 3061–3083 (1997)
5. Larsson, P.L.: On the mechanical behavior of global parameters
in material characterization by sharp indentation testing. J. Test-
ing Eval. 32, 310–321 (2004)
6. Oliver, W.C., Pharr, G.M.: An improved technique for deter-
mining hardness and elastic modulus using load and displacement
sensing indentation experiments. J. Mater. Res. 7, 1564–1583
(1992)
7. Wilshaw, T.R.: The Hertzian fracture test. J. Phys. D Appl. Phys.
4, 1567–1581 (1971)
8. Fredriksson, P., Larsson, P.L.: Wedge indentation of thin films
modeled by strain gradient plasticity. Int. J. Solids Struct. 45,
5556–5566 (2008)
9. Sneddon, I.N.: The relation between load and penetration in the
axisymmetric Boussinesq problem for a punch of arbitrary pro-
file. Int. J. Eng. Sci. 3, 47–57 (1965)
10. Larsson, P.L.: Investigation of sharp contact at rigid plastic
conditions. Int. J. Mech. Sci. 43, 895–920 (2001)
11. Jang, J., Lance, M.J., Wen, S.Q., Tsui, T.Y., Pharr, G.M.:
Indentation-induced phase transformations in silicon: influences
of load, rate and indenter angle on the transformation behavior.
Acta Mater. 53, 1759–1770 (2005)
12. Hertz, H.: Uber die Beruhrung fester elastischer Korper. J. Reine
Angew. Math. 92, 156–171 (1882)
13. Spence, D.A.: The Hertz contact problem with finite friction.
J. Elast. 5, 297–319 (1975)
14. Hills, D.A., Sackfield, A.: The stress field induced by normal
contact between dissimilar spheres. J. Appl. Mech. 54, 8–14
(1987)
15. Borodich, F.M.: The Hertz frictional contact between nonlinear
elastic anisotropic bodies (the similarity approach). Int. J. Solids
Struct. 30, 1513–1526 (1993)
16. Giannakopoulos, A.E., Larsson, P.L.: Analysis of pyramid
indentation of pressure sensitive hard metals and ceramics. Mech.
Mater. 25, 1–35 (1997)
17. Carlsson, S., Biwa, S., Larsson, P.L.: On frictional effects at
inelastic contact between spherical bodies. Int. J. Mech. Sci. 42,
107–128 (2000)
18. Mata, M., Alcala, J.: The role of friction on sharp indentation.
J. Mech. Phys. Solids 52, 145–165 (2004)
19. Storakers, B., Elaguine, D.: Hertz contact at finite friction and
arbitrary profiles. J. Mech. Phys. Solids 53, 1422–1447 (2005)
20. Jelagin, D., Larsson, P.-L.: On indentation and initiation of
fracture in glass. Int. J. Solids Struct. 45, 2993–3008 (2008)
21. Johnsson, K.L., O’Connor, J.J., Woodward, A.C.: The effect of
indenter elasticity on the Hertzian fracture of brittle materials.
Proc. R. Soc. London A 334, 95–117 (1973)
22. Elaguine, D., Brudieu, M.-A., Storakers, B.: Hertzian fracture at
unloading. J. Mech. Phys. Solids 54, 2453–2473 (2006)
23. Lawn, B.R.: Indentation of ceramics with spheres: a century after
Hertz. J. Am. Cer. Soc. 81, 1977–1994 (1998)
24. Oden, J.T., Pires, E.B.: Nonlocal and nonlinear friction laws and
variational principles for contact problems in elasticity. J. Appl.
Mech. 50, 67–73 (1983)
25. Olofsson, U., Hagman, L.A.: A model for micro-slip between flat
surfaces based on deformation of ellipsoidal elastic bodies. Tri-
bol. Int. 30, 599–603 (1997)
26. Greenwood, J.A., Williamson, J.B.P.: Contact of nominally flat
surfaces. Proc. R. Soc. London A295, 300–319 (1966)
27. Johnson, K.L., Greenwood, J.A., Higginson, J.G.: The contact of
elastic regular wavy surfaces. Int. J. Mech. Sci. 27, 383–396
(1985)
28. Corbone, G., Bottiglione, F.: Asperity contact theories: Do they
predict linearity between contact area and load? J. Mech. Phys.
Solids 56, 2555–2572 (2008)
29. Lim, Y.Y., Chaudhri, M.M.: Indentation of elastic solids with
rigid cones. Phil. Mag. 84, 2877–2903 (2004)
30. Lim, Y.Y., Chaudhri, M.M.: Indentation of elastic solids with a
rigid Vickers pyramid indenter. Mech. Mater. 38, 1213–1228
(2006)
406 Tribol Lett (2013) 51:397–407
123

31. ABAQUS. User’s manual version 6.9, Hibbitt, Karlsson and
Sorensen Inc., Pawtucket, 2009
32. Zhong, Z.H.: Contact problems with friction. Proceedings of
Numiform 89, Balkema, Rotterdam, 1989, pp. 599–606
33. Giannakopoulos, A.E., Larsson, P.L., Vestergaard, R.: Analysis
of Vickers indentation. Int. J. Solids Struct. 31, 2679–2708 (1994)
34. Larsson, P.L., Soderlund, E., Giannakopoulos, A.E., Rowcliffe,
D.J., Vestergaard, R.: Analysis of Berkovich indentation. Int.
J. Solids Struct. 33, 221–248 (1996)
35. Xu, Z.H., Li, X.: Effects of indenter geometry and material
properties on the correction factor of Sneddon’s relationship for
nanoindentation of elastic and elastic–plastic materials. Acta
Mater. 56, 1399–1405 (2008)
36. Mesarovic, S.D., Fleck, N.A.: Frictionless indentation of dis-
similar elastic–plastic spheres. Int. J. Solids Struct. 37, 7071–
7091 (2000)
37. Larsson, P.L.: Modelling of sharp indentation experiments: some
fundamental issues. Phil. Mag. 86, 5155–5177 (2006)
38. Larsson, P.L.: Similarity methods for analysing indentation
contact problems—Advantages and disadvantages. J. Mater.
Proc. Tech. 202, 15–21 (2008)
39. ABAQUS. Theory manual version 6.9, Hibbitt, Karlsson and
Sorensen Inc., Pawtucket, 2009
40. Laursen, T.A., Simo, J.C.: A study of the mechanics of micro-
indentation using finite-elements. J. Mater. Res. 7, 618–626
(1992)
41. Hay, J.C., Bolshakov, A., Pharr, G.M.: A critical examination of
the fundamental relations used in the analysis of nanoindentation
data. J. Mater. Res. 14, 2296–22305 (1999)
42. Larsson, P.L., Giannakopoulos, A.E.: Tensile stresses and their
implication to cracking at pyramid indentation of pressure-sen-
sitive hard metals and ceramics. Mater. Sci. Eng. A254, 268–281
(1998)
43. Swaddiwudhipong, S., Hua, J., Tho, K.K., Liu, Z.S.: Equivalency
of Berkovich and conical load-indentation curves. Modell. Simul.
Mater. Sci. Eng. 14, 71–82 (2006)
44. Antunes, J.M., Menezes, L.F., Fernandes, J.V.: Three-dimen-
sional numerical simulation of Vickers indentation tests. Int.
J. Solids Struct. 43, 784–806 (2005)
45. Eriksson, C.L., Larsson, P.L., Rowcliffe, D.J.: Strain-hardening
and residual stress effects in plastic zones around indentations.
Mater Sci Eng A340, 193–203 (2003)
46. Jelagin, D., Larsson, P.-L.: Hertzian fracture at finite friction: a
parametric study. Wear 265, 840–848 (2008)
47. Hagman, L.A., Olofsson, U.: A model for micro-slip between flat
surfaces based on deformation of ellipsoidal elastic asperities—
parametric study and experimental investigation. Tribol. Int. 31,
209–217 (1998)
48. Johnson, K.L.: Contact Mechanics. Cambridge University Press,
Cambridge (1985)
Tribol Lett (2013) 51:397–407 407
123





























