Embed Size (px)
Citation preview
1
Introduction to Robotics – CS223A
Oussama KhatibTorsten Kroeger
Department of Computer ScienceStanford University
Stanford’s JediBot
Celebrating 50 Years of Robotics!
2
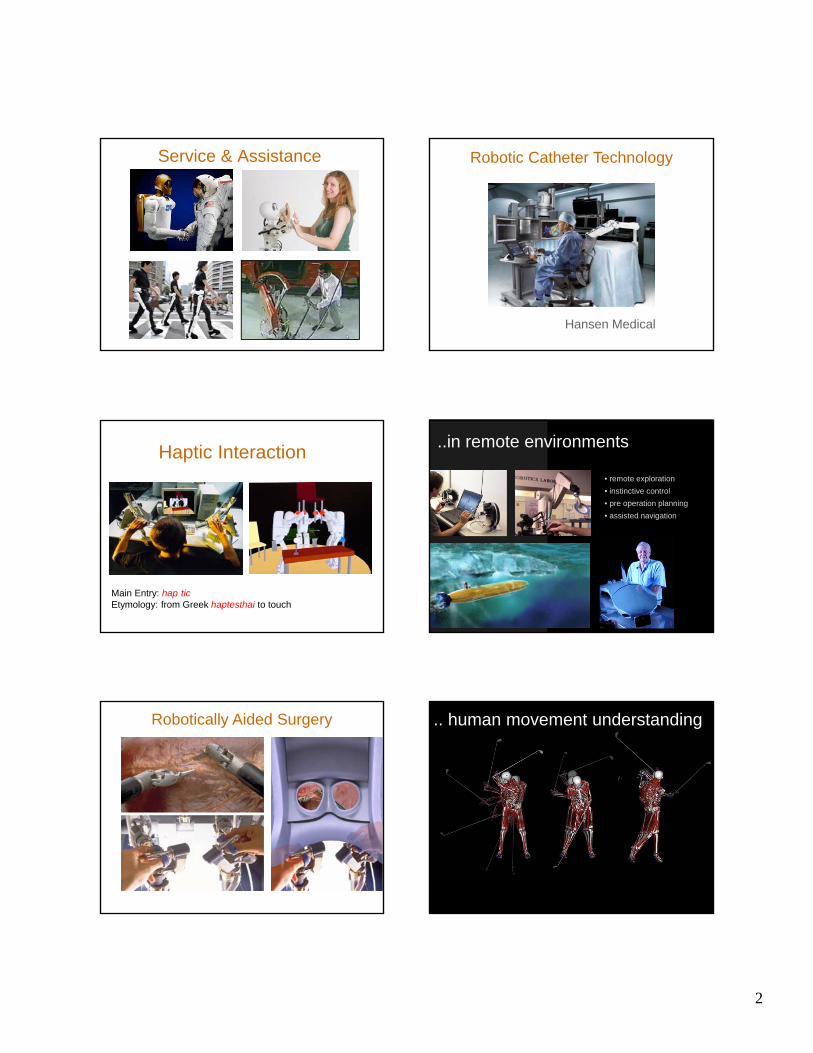
Service & Assistance
Haptic Interaction
Main Entry: hap·ticEtymology: from Greek haptesthai to touch
Robotically Aided Surgery
Robotic Catheter Technology
Hansen Medical
..in remote environments
• remote exploration
• instinctive control
• pre operation planning
• assisted navigation
.. human movement understanding

3
1
..in human interaction
• digital actors
• virtual worlds
• synthetic movies
• simulated environments
• social interaction
.. in the human environment
S a f e t y
.. not only walk, but also interact with the world!mobility & whole body compliant manipulation!
Multiple Sensing ModalitiesCombining visual, range, force, and tactile sensing feedback.
Probabilistic framework for globalstate estimation
Sensing and Perception
4
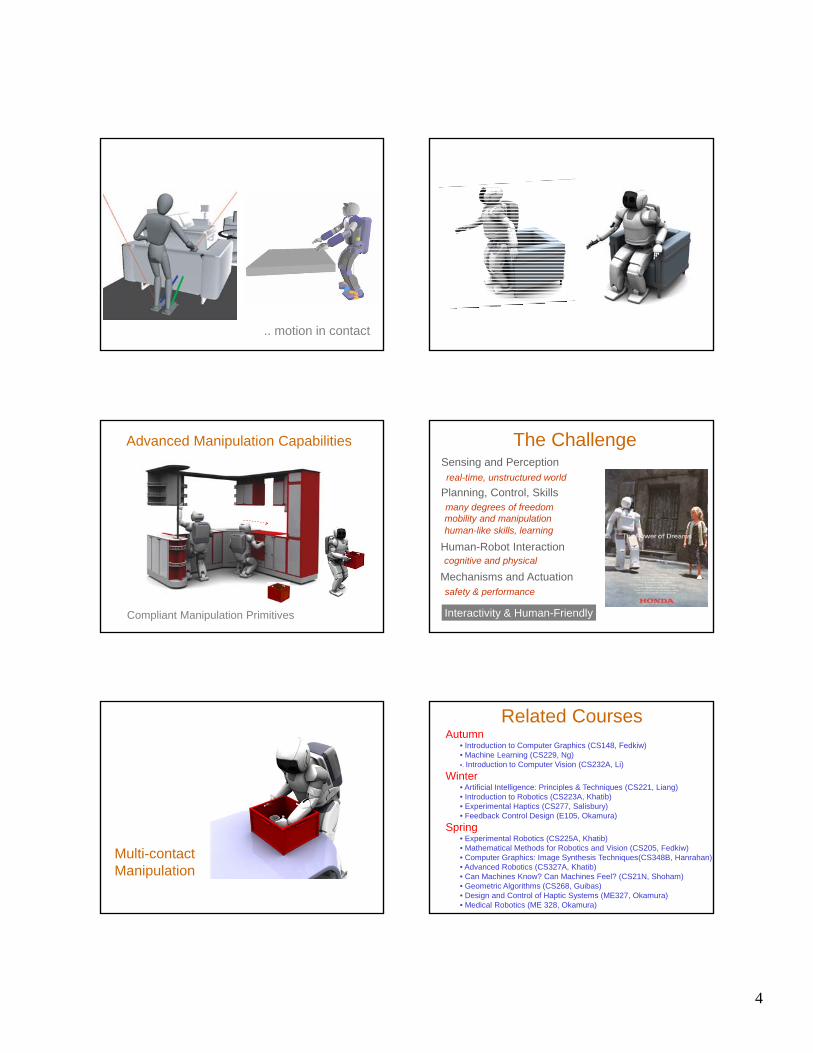
.. motion in contact
Compliant Manipulation Primitives
Advanced Manipulation Capabilities
Multi-contact Manipulation
The Challenge
safety & performance
Sensing and Perception
Planning, Control, Skills
real-time, unstructured world
many degrees of freedom
Human-Robot Interaction
Mechanisms and Actuation
cognitive and physical
Interactivity & Human-Friendly
human-like skills, learningmobility and manipulation
Autumn • Introduction to Computer Graphics (CS148, Fedkiw)• Machine Learning (CS229, Ng)•. Introduction to Computer Vision (CS232A, Li)
Winter• Artificial Intelligence: Principles & Techniques (CS221, Liang)• Introduction to Robotics (CS223A, Khatib)• Experimental Haptics (CS277, Salisbury)• Feedback Control Design (E105, Okamura)
Spring• Experimental Robotics (CS225A, Khatib)• Mathematical Methods for Robotics and Vision (CS205, Fedkiw)• Computer Graphics: Image Synthesis Techniques(CS348B, Hanrahan)• Advanced Robotics (CS327A, Khatib)• Can Machines Know? Can Machines Feel? (CS21N, Shoham)• Geometric Algorithms (CS268, Guibas)• Design and Control of Haptic Systems (ME327, Okamura)• Medical Robotics (ME 328, Okamura)
Related Courses
5
Professor Oussama KhatibOffice: Gates144 Phone: 723-9753 Email: [email protected] hours: MW 4:00 - 5:00
Dr. Torsten KrogerE-mail: [email protected]: Gates 122Phone: 725-8810Office hours: MW 4:00 - 5:00
Instructors
Jaeyun Bae Gerald Brantner Mihitha Nutakki Xiyang Yeh
Teaching Assistants
Office: Gates B26B Office hours: Mo 4-5pm, Tu 2-6pm Th 2-3pm
Lecture Notes
Recommended reading:Introduction to Robotics: Mechanics and Control,John J. Craig, Pearson Education, 3rd Edition, 2005
Mechanics, 3rd Edition: Volume 1 - Course of Theoretical Physics, L D Landau, E.M. Lifshitz.
Monday, January 07, 2013 Introduction (read handout)Wednesday, January 09, 2013 Spatial descriptions 1 (read LN:ch 1)
Monday, January 14, 2013 Spatial descriptions 2 (read LN:ch 1)Wednesday, January 16, 2013 Forward Kinematics 1 (read LN:ch 2)
Monday, January 21, 2013 Holiday (Martin Luther King)Wednesday, January 23, 2013 Forward Kinematics 2 (read LN:ch 2)
Monday, January 28, 2013 Inverse Kinematics (read LN: ch3)Wednesday, January 30, 2013 Trajectory Generation (read LN: ch6)Monday, February 04, 2013 Jacobians: Explicit Form (read LN:ch4)
Wednesday, February 06, 2013 Jacobians: Velocities (read LN: ch4)Wednesday, February 06, 2013 Review 1 – Group I (7‐9pm, Gates 119)
Thursday, February 07, 2013 Review 1 – Group II (7‐9pm, Gates 119)Monday, February 11, 2013 Midterm examination (in class)
Wednesday, February 13, 2013 Jacobians: Static Forces (read LN:ch4)Monday, February 18, 2013 Holiday (President’s Day)
Wednesday, February 20, 2013 Dynamics: Acceleration and Inertia: (read LN:ch5)Monday, February 25, 2013 Dynamics: Explicit Form (read LN:ch5)
CS223A Lecture and Reading Schedule
Wednesday, February 27, 2012 Vision in Robotics (Guest Lecturer)Monday, March 04, 2012 Control: PID control (read LN:ch7)
Wednesday, March 06, 2012 Control: Joint space control (read LN:ch7)Monday, March 11, 2012 Control: Operational space & Force control (read LN:ch7)Monday, March 11, 2012 Review 2 – Group I (7‐9pm, Gates 119)Tuesday, March 12, 2012 Review 2 – Group II (7‐9pm, Gates 119)
Wednesday, March 13, 2012 Advanced TopicsMonday, March 18, 2012 Final examination (12:15 ‐ 3:15 p.m.)
CS223A Lecture and Reading Schedule
Introduction to Robotics, CS223A
Mathematical Models• Kinematics• Dynamics
Planning and Control• Motion Planning• Motion Control• Force Control
Advanced Topics
6
Stanford’s JediBot
Spatial Descriptions
• Position and Orientation Descriptions• Transformations between Frames
ManipulatorPrismatic Joint
RevoluteJoint
Base End-Effector
7
Manipulator Kinematics
• Link Description• Denavit-Hartenberg Notation• Forward Kinematics
Link Description
Link I-1
Axis i
Axis (I-1)
ai-1
i-1
1joint
1Link
0Linknjoint
nLink
1nLink
1iz
1iy 1iR
1ix
nynR
nx
nz0 1,z z
1y
0R 1
1x0x 1R 0y
iyiR
ix
iz
1iLink
ijoint
iLink
1ijoint
2iLink
Kinematic Chain
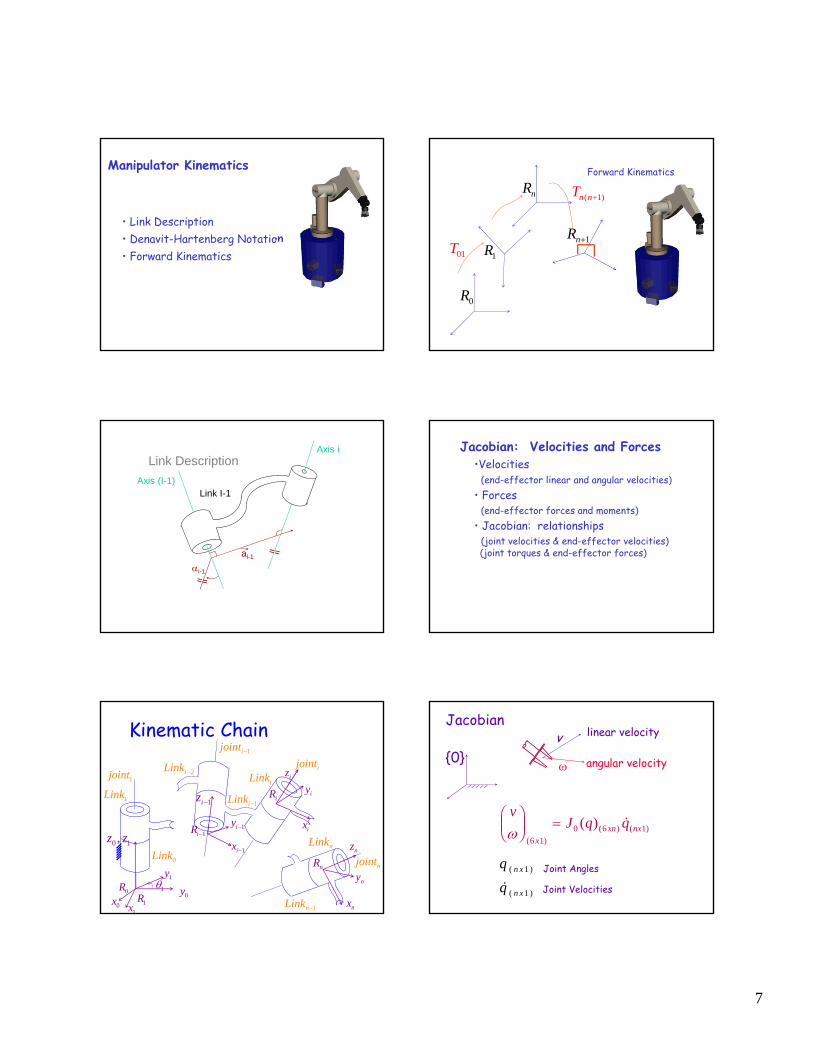
0R
1R01T
nR( 1)n nT
1nR
Forward Kinematics
Jacobian: Velocities and Forces•Velocities
(end-effector linear and angular velocities)• Forces
(end-effector forces and moments)• Jacobian: relationships
(joint velocities & end-effector velocities)(joint torques & end-effector forces)
Jacobian
{0} angular velocity
linear velocity
vJ q q
x
xn nxFHGIKJ
(
( ) (( ) 6 1)
0 6 1)
v
( 1 )
( 1 )
n x
n x
q
qJoint Angles
Joint Velocities
8
The Jacobian (EXPLICIT FORM)i
Pin v j
v j i i inP
End-Effector Linear Velocity
End-Effector Angular Velocity
v Z Z P qi i i i ini
n
i [ ( )].
1
( ). i ii
n
iZ q1
Inverse Kinematics
Finding joint positions given
end-effector position and
orientation
Solvability,
Existence,
MultiplicityClosed Form,Numerical Solutions
Path DescriptionJoint Space TrajectoriesCartesian Space Trajectories
i
l k
j
ttk
t jk
tdjktdij
slope= jk
slope= kl
slope= ij
slope= lm
ti tmtlmtltkltjtij
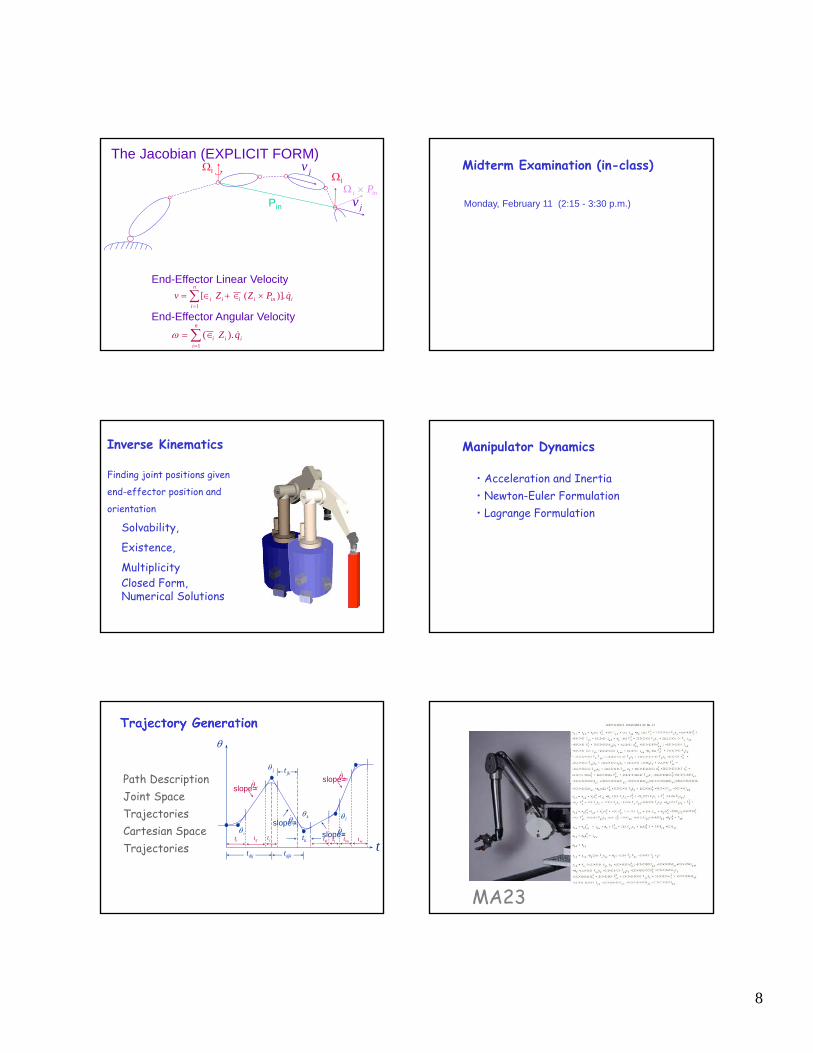
Midterm Examination (in-class)
Monday, February 11 (2:15 - 3:30 p.m.)
Manipulator Dynamics
• Acceleration and Inertia• Newton-Euler Formulation• Lagrange Formulation
MA23
9
ni
fi
fi 1 ni 1
pi1
pCi
Fi
Ni
F f f
N n n f fi i i
i i i C i i C ii i
1
1 1 1( ) ( ) ( )p p p
Newton-Euler
vcii
Pci
Link i
K m v v Ii i CT
C iT C
i ii i
1
2( )
K Kii
n
1
Total Kinetic Energy
Explicit FormLagrange Formulation
1
2
1
2 1
1
[ ( )
( )
q q qT Ti v
Tv
T CC
i
n
i vT
vT C
Ci
n
M m J J J I J
M m J J J I J
i i i i i
i i i i i
Manipulator Equations of MotionExplicit Form vci
i
Pci
Link i
Mass Matrix
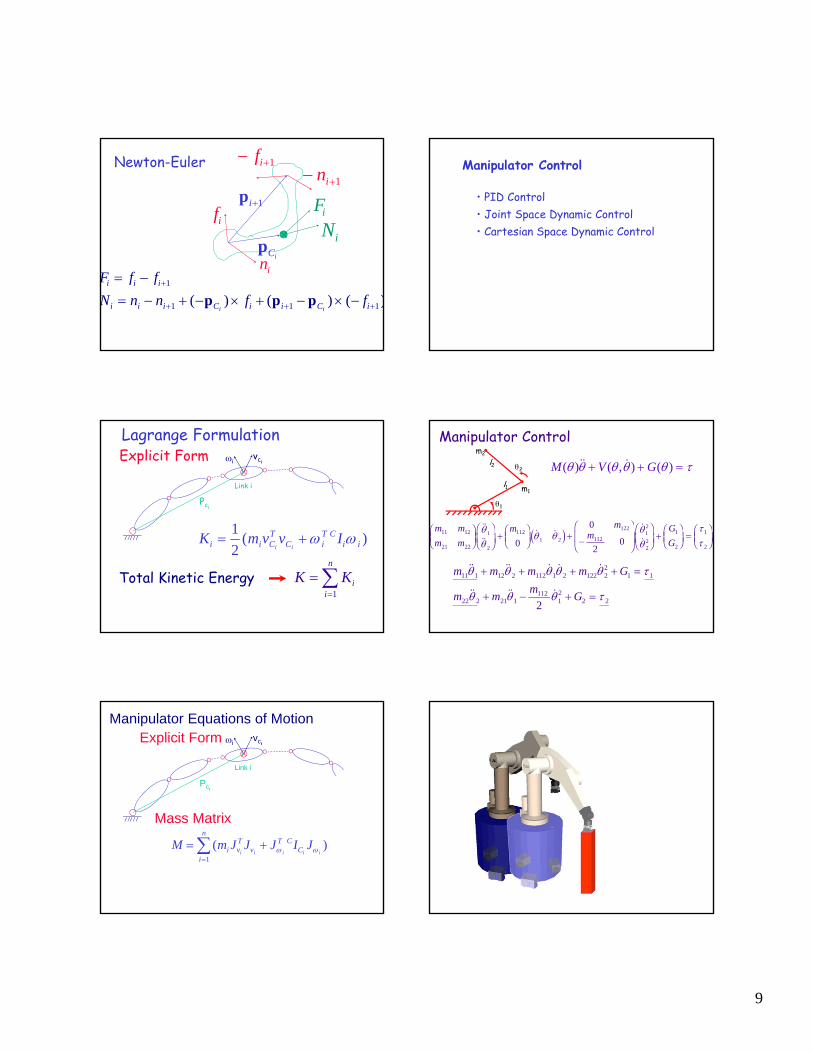
Manipulator Control
• PID Control• Joint Space Dynamic Control• Cartesian Space Dynamic Control
Manipulator Control
M V G( ) ( , ) ( )
m m
m m
m mm
G
G11 12
21 22
1
2
1121 2
122
11212
22
1
2
1
20
0
20
FHG
IKJFHGIKJ FHGIKJ
FHG
IKJFHGIKJ FHGIKJ FHGIKJ
d i
m m m m G
m mm
G
11 1 12 2 112 1 2 122 22
1 1
22 2 21 1112
12
2 22
m2
l2 2
m1l1
1
10
F
( )GoalV xF
( )GoalV x
T FJ
Task-Oriented Control
F
dynamics( )F F
x
x Fp
Task-Oriented Dynamics
Manipulator Force Control
• Constrained Motion• Position/Force Control• Contact Stability
Unified Motion/Force Control
motion contactF F F contactF
motionF
Advanced Topics
• Robot Design• Motion Planning• Haptics• Humanoids
Safety
11
Safety
Performance
Competing?
Requirements
Human-Friendly Robot Design
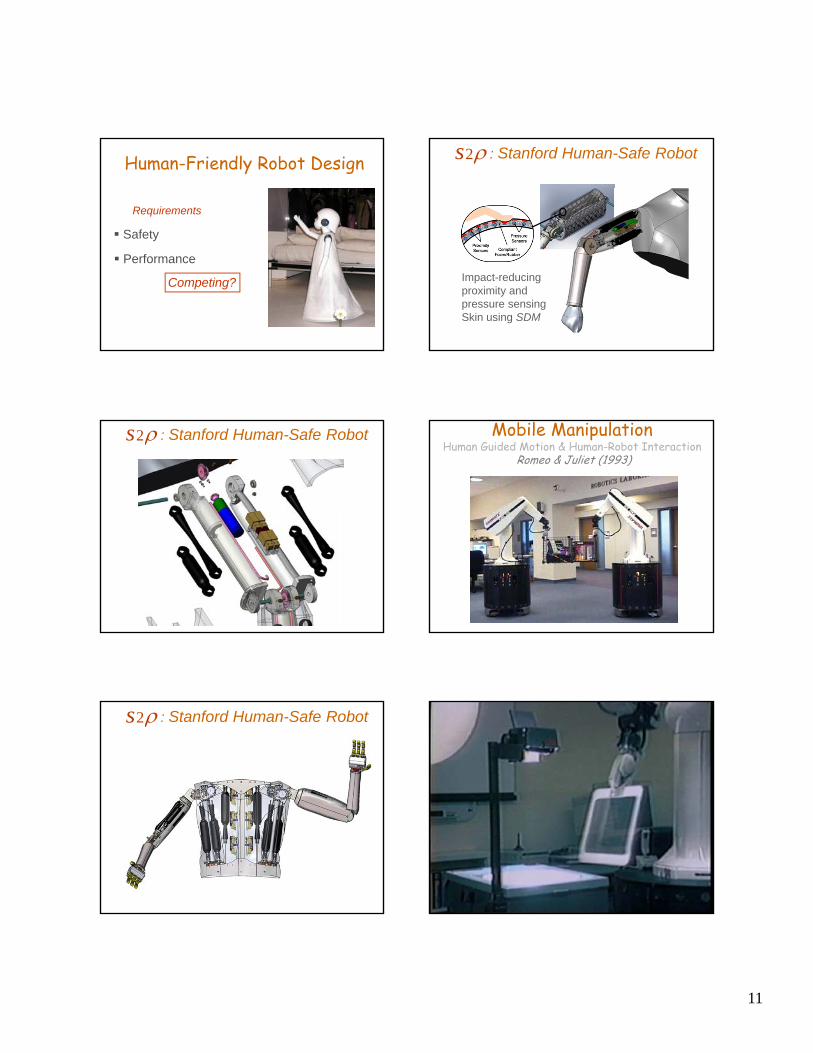
: Stanford Human-Safe Robot 2s
: Stanford Human-Safe Robot 2s
: Stanford Human-Safe Robot 2s
Impact-reducingproximity andpressure sensingSkin using SDM
Mobile ManipulationHuman Guided Motion & Human-Robot Interaction
Romeo & Juliet (1993)
12
Mobile ManipulationHuman Guided Motion & Human-Robot Interaction
Romeo & Juliet (1993)
Artificial Potential Field -Video
ElasticPlanning
13
ElasticPlanning
Human movement
understandinghuman motion
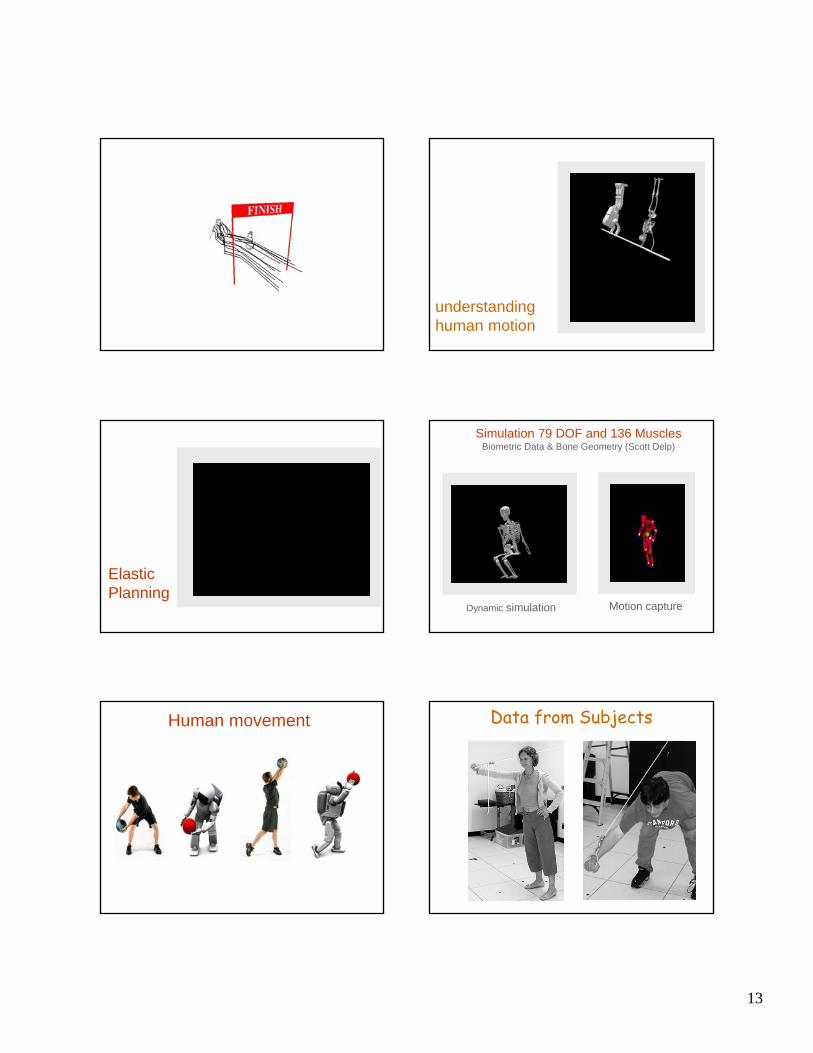
Motion capture
Simulation 79 DOF and 136 MusclesBiometric Data & Bone Geometry (Scott Delp)
Dynamic simulation
Data from Subjects
14
Physio-Mechanical Advantage
ASIMO
SAI Neuromuscular Library
Throwing
Football Player
Motion CaptureForce Plate
15
Human MotionAtlas
Collision Detection
Collision Resolution
16
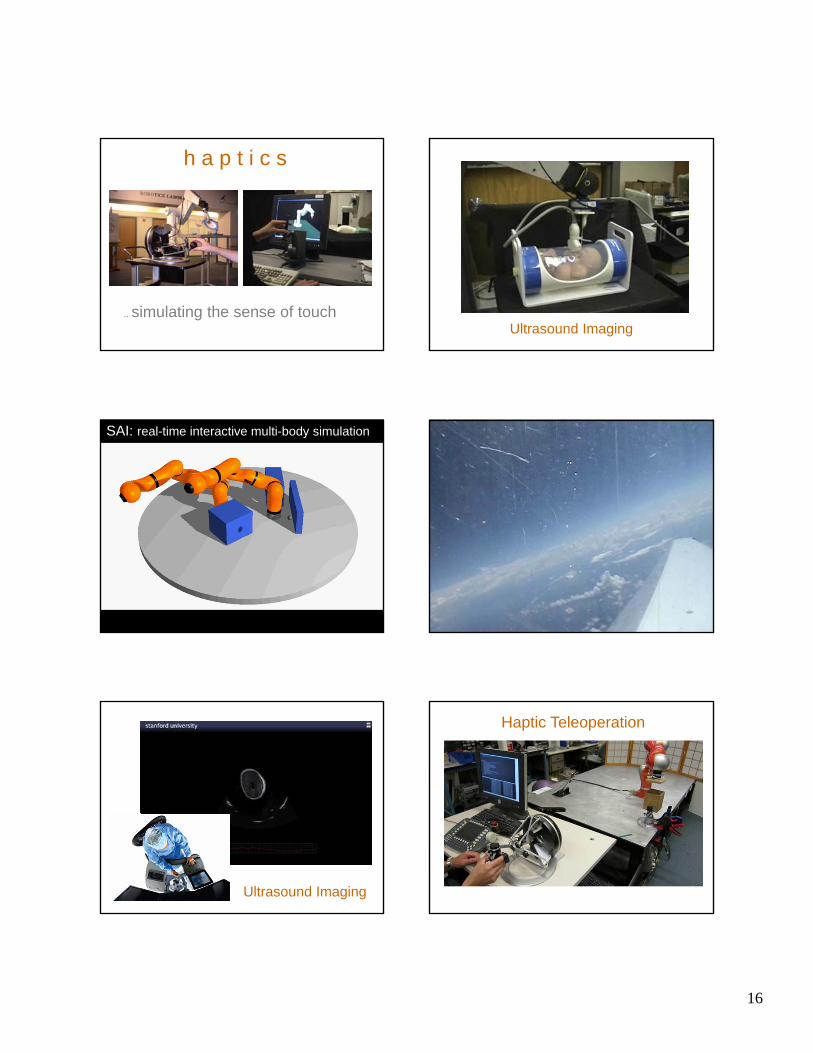
.. simulating the sense of touch
h a p t i c s
SAI: real-time interactive multi-body simulation
Ultrasound Imaging
Ultrasound Imaging
Haptic Teleoperation

17
Haptic Teleoperation
Exploring the Oceans..
Exploring the Oceans..
Final Examination (in-class)
Monday, March 18 (12:15 - 3:15 p.m.)
Course Mechanics• Homework: Weekly Problem Set
- Due 7 days later (30% per day penalty)- All homework must be done individually- All homework must be handed in to receive the final grade
• Grading: Weighted Average(Homework 30%, Midterm 25%, Final 45%)
18
Thank You!





























