Embed Size (px)
Citation preview

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
1
Fast Numerically Stable Computation of Orthogonal
Fourier-Mellin Moments
G.A. Papakostas1, Y.S. Boutalis
1 D.A. Karras
2 and B.G. Mertzios
3
1Democritus University of Thrace, Department of Electrical and Computer
Engineering, 67100 Xanthi, Hellas
e-mail: [email protected], [email protected]
2Chalkis Institute of Technology, Automation Department
Chalkida, Hellas
e-mail: [email protected]
3Thessaloniki Institute of Technology, Department of Automation, Laboratory of
Control Sys. And Comp. Intell., Thessaloniki, Hellas
e-mail: [email protected]
Abstract
An efficient algorithm for the computation of the Orthogonal Fourier-Mellin
Moments (OFMMs) is presented in this paper. The proposed method computes the
fractional parts of the orthogonal polynomials, which consist of fractional terms,
recursively, by eliminating the number of factorial calculations. The recursive
computation of the fractional terms makes the overall computation of the OFMMs, a
very fast procedure in comparison with the conventional direct method. Actually, the
computational complexity of the proposed method is linear O(p) in multiplications,
with p being the moment order, while corresponding complexity of the direct method
is O(p2). Moreover, this recursive algorithm has better numerical behaviour, since it
arrives at an overflow situation much later, than the original one and doesn’t introduce
any finite precision errors. These are the two major advantages of the algorithm,
introduced in the current paper, establishing the computation of the OFMMs to a very
Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
2
high order, as a quite easy and achievable task. Appropriate simulations on images of
different sizes, justify the superiority of the proposed algorithm over the conventional,
used currently.
Keywords: Fourier-Mellin moments, recursive computation, image representation,
overflow
1. Introduction
Although there is an increasing number of published papers that introduce a new
set of features for image representation and pattern classification purposes, the
traditional moment feature sets are still drawing the attention of the scientific
community.
Among the various moment types, such as the geometric, central, normalized,
statistical moments [1], there is a very powerful one, the orthogonal moments [2-3].
The most significant property of the orthogonal moments, is their ability to fully
describe an object, with minimum redundant information and thus the reconstruction
of an object by a finite number of moments, is possible.
The orthogonal moments are categorized in families according to the type of the
orthogonal polynomials that are making use, as kernel functions. The most utilized
orthogonal families are the Zernike, Pseudo-Zernike and Fourier-Mellin moments,
which are widely used as image descriptors in image processing tasks. Moreover,
their property to stay invariant to any rotation of the object presented in a scene, in

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
3
addition to their ability to describe spatial frequency components of an image, make
them appropriate for pattern classification applications [4-6].
Although, the previous orthogonal moments have useful attributes, over the other
moment types, the presence of many factorial terms in their polynomial definitions,
make their computation a very time consuming task. While the computational
capabilities of the modern computers are always increasing, the factorial of a big
number remains a very demanding process.
For this reason, many researchers have introduced recursive algorithms for the
computation of Zernike [7-11] and Pseudo-Zernike [12] moments, by eliminating the
factorial calculations. However, these algorithms have the possibility to generate and
propagate finite precision errors, as classical signal processing algorithms do [13-15].
Additionally, there is not any recursive algorithm for the computation of the Fourier-
Mellin moments and the usage of the direct method that includes many factorial terms
is the only choice.
This paper comes to cover the need of factorial-free recursive algorithm for the
case of OFMMs, by introducing a fast algorithm for computing the OFMMs.
Moreover, the algorithm is suitable for computing higher moment orders, than the
conventional direct method, since it is driven in overflow conditions slower.
The paper is organized, by describing the fundamental theory of the OFMMs in
section 2, introducing the proposed recursive algorithm in section 3 and finally by
justifying the efficiency of the algorithm through appropriate simulations in section 4.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
4
2. Orthogonal Fourier-Mellin Moments
In [16] Sheng and Shen introduced a set of orthogonal moments, for pattern
recognition purposes, by using a set of complex polynomials Upq(x,y), which form a
complete orthogonal set over the interior of the unit circle 122 yx . These
polynomials in polar coordinates have the form
iqrQrU ppq exp, (1)
where p (the order of the Mellin radial transform) is a non-negative integer, q = 0, ±1,
±2, … (the circular harmonic order) , r is the length of the vector from the origin
yx, to the pixel yx, and θ the angle between vector r and x axis in counter-
clockwise direction. The kernel of the complex polynomials of (1), is a set of
orthogonal radial polynomials [16] in (r,θ) polar coordinates defined as
p
k
kkp
p rkkkp
kprQ
0 !1!!
!11 (2)
The above Formula (2), that calculates the orthogonal polynomials Qp, is called
direct method, for the rest of the present paper.
The polynomials of (1) are orthogonal and satisfy the orthognality principle,
mqnp
yx
pqnmn
dxdyyxUyxU
1,,
122
(3)

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
5
where δαβ =1 for α=β and δαβ =0 otherwise, is the Kronecker delta.
The Orthogonal Fourier-Mellin moment of order p and repetition q for a
continuous image function f(x,y), that vanishes outside the unit disk is
122
,,1
yx
pqpq dxdyrUyxfp
O
(4)
For a digital image, the integrals are replaced by summations, to get
1,,,1 22
yxrUyxf
pO
x y
pqpq
(5)
Suppose that one knows all moments Opq of f(x,y) up to a given order pmax. It is
desired to reconstruct a discrete function yxf ,
, whose moments exactly match those
of f(x,y) up to the given order pmax. The OFMMs are the coefficients of the image
expansion into the orthogonal polynomials (1), as it can be seen in the following
reconstruction equation
max max
max0
,,p
p
p
pq
pqpq rUOyxf (6)
Note that as pmax approaches infinity, yxf ,
will approach f(x,y).
It has been noted in [16-17] that the Fourier-Mellin moments are more appropriate
to describe images of small size in terms of image reconstruction errors and signal-to-

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
6
noise ratios, than the Zernike and Pseudo-Zernike ones. Additionally, since the radial
polynomials (2) used in OFMMs have much more zeros than those of the other
orthogonal moments, the OFMMs have the capability to describe high spatial
frequency components of an image. Therefore, the order of OFMMs required to
represent an image can be much lower than that of ZMs or PZMs, and thus they are
less sensitive to variation and noise [16-17]. These properties make the OFMMs very
useful in image representation [19] of various sizes and in pattern recognition
applications [17-18].
3. Proposed Recursive Method
Although, OFMMs have considerable properties, as have already been discussed in
the previous section, the presence of many factorial computations in (2), which are
operations that may consume too much computer time, makes their computation a
very time consuming task.
The same problem also exists in the case of Zernike (ZMs) and Pseudo-Zernike
(PZMs) moments. In those cases, recursive algorithms that reduce or even eliminate
the factorial calculations, have already been presented [7-12]. However, a recursive
algorithm for the computation of the orthogonal Fourier-Mellin moments has not been
proposed yet.
In this section a factorial-free recursive algorithm, for the computation of the
OFMMs, without having possible numerical instabilities, as in the case of ZMs [20],
and with considerably better behaviour than the direct method, is introduced.
Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
7
A recursive algorithm for the OFMMs computation has to satisfy some very critical
demands in order to be applicable:
1. The algorithm should not exhibit any quantization errors, such as finite
precision errors, as some classical algorithms in signal processing and recently
a recursive algorithm for the ZMs computation [20], do. This is very crucial,
since the generation of a numerical error in one step of the algorithm and its
propagation to subsequent steps, may cause the algorithm to “destroy” by
resulting in unreliable quantities.
2. The recursive algorithm must be faster than the direct method and of course it
should give the same values for the computed OFMMs.
3. The algorithm should permit the computation of OFMMs up to very high
orders in order to capture, as much as possible image information.
4. The computation of a single moment of order p and repetition q, should be
allowed without computing intermediate moments. This characteristic is very
useful in pattern recognition applications, where feature vectors consisting of
moments of non consecutive orders might be desirable [21].
Keeping in mind that the above four demands have to be satisfied by an efficient
recursive algorithm, we introduce the following equation for computing the radial
polynomial of order p,
p
k
k
pk
kp
p
p
p rTTrQ1
0 11 (7)
where

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
8
1
0
1
11
1
kppk
p
Tkk
kpkpT
pT
(8a)
(8b)
A detailed proof of the derivation of these formulas is given in the Appendix.
As it can be seen from equations (8a) and (8b), the calculation of the fractional
terms
!1!!
!1
kkkp
kp in (2), can now be evaluated by avoiding the factorial
computations, through the use of the recurrence equation (8b).
This fact is very impressive, since the time consuming task of computing the
fractional terms, due to the factorials, is transformed in easier operations. The absence
of the factorial terms in the proposed recursive algorithm makes it superior to the
direct method (2).
The first requirement of avoiding the generation and propagation of any numerical
error through the recursive computations is totally satisfied. The main reason of
causing finite precision errors in the recursive algorithms is the presence of
subtractions between real numbers of opposite sign and common number of digits
[13]. A thorough study of (8a) and (8b), can lead to the conclusion that the proposed
algorithm doesn’t generate finite precision errors, since the subtractions are between
integer numbers, which will be exactly the same or completely different. Thus, there
is no possibility to subtract numbers that have the opposite sign and common digits,
which could eventually lead to the generation of finite precision errors.
Furthermore, the introduced algorithm recursively computes the fractional terms of
the radial polynomials. No recursive computation of consecutive polynomials is
performed. It is therefore clear that it permits the recursive computation of an
Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
9
individual moment, having order p and repetition q. Consequently, there is no need to
compute intermediate moments and thus the fourth requirement is satisfied, too.
The rest demands to be satisfied are studied in the next sections, where appropriate
experiments are taking place.
3.1 Computational Complexity
For the sake of simplicity for the computational complexity of the proposed method, it
is decided to take into account only the number of the required multiplications, in our
study. The number of additions is of less importance since they are executed in a short
time. In the following, a detailed comparison between the proposed and the direct
methods, in respect to the number of multiplications the fractional terms of the two
methods need to execute in order a radial polynomial of order p, Qp be computed.
The computational complexity of our recursive algorithm, versus that of the direct
method is being discussed in the current section. From equation (2), it is obvious that
the computational complexity of the direct method is very high, due to the presence of
the factorial terms. Specifically, the number of multiplications that have to be
executed, in order to compute a fractional term of (2) is (4p-1), in the worst case. As,
the order p increases, the summation in (2) consists of many fractional terms that have
factorials, therefore the number of required multiplications to compute a single
polynomial of order p, Qp is (p+1)*(4p-1) in the worst case.. Thus, the computational
complexity of the direct method, for computing a single radial polynomial Qp of order
p, is O(p2).

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
10
The proposed algorithm is of less computational complexity, since its recursive
formula, eliminates the factorial terms, by having only 3 multiplications in every
fractional term. The number of required multiplications to compute a single radial
polynomial of order p is (3p), in the case of the proposed algorithm and its
computational complexity is linear, i.e. O(p).This complexity is significant smaller
than that of the original direct method and makes the algorithm suitable for the
computation of OFMMs, up to very high orders.
Therefore, the recursive computation of the fractional terms, as proposed in the
present paper, is faster than the direct method and permits the computation of
moments of higher orders.
The efficiency of the algorithm in computing the OFMMs, will be studied in
section 4, where the moments of images of several sizes and types are being
computed.
3.2 Numerical Behaviour
The direct method for the computation of OFMMs, uses of many factorial
calculations, in each evaluation of radial polynomial Qp. These calculations represent
a very significant part of the overall computation procedure and influence the
procedure with numerical instabilities. This happens in high order cases, where the
need of computing factorials of big numbers leads to overflow situations.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
11
Overflow is the situation in which a quantity takes a higher value, from the range
of its data type. For example, the float (7 digit precision) data type has a valid range
[1.18x10-45
, 3.40x1045
], while the double (15 digit precision) data type has a valid
range [2.23x10-308
, 1.79x10308
], in the case of IBM PC compatible computers.
More precisely, from (2) it is obvious that as the order p and the index k increase,
the numerator’s factorial (p+k+1)!, tends to an overflow state, more quickly than the
other ones (p-k)!, k!, (k+1)!. For example, when p=85 and k=85, we have to calculate
the factorial 171!, which is a number greater than the range of a double data type. In
this case, an overflow occurs and the resulted value takes the 0 value.
This situation is very crucial, when the moments up to a high order need to be
computed. The proposed recursive algorithm does not show this weakness, since it
does not include any factorial computation.
From the following Figure 1, the values of the fractional terms of radial
polynomials for the direct and recursive methods, for various orders p, have been
plotted. This figure shows, that while the direct method starts to calculate the
fractional terms for p=85 order and index k=85 with an overflow, the proposed
algorithm does not fall in overflow situation. The proposed algorithm presents an
overflow situation only owing to the factor rp, which happens in the direct method
too. In Figure 1, the overflowed fractional terms are denoted with “*” marker, while
the non-overflowed ones with the “.”
Figure 1

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
12
4. Experimental Study
In order to study the effectiveness of the proposed recursive algorithm, a set of
experiments have taken place. Two different sizes of the well known benchmark
Lena’s image have been selected, to be used as test images, with 64x64 and 128x128
pixels, grey level images, as depicted in Figure 2.
Figure 2
The Fourier-Mellin moments up to various maximum orders pmax, are computed
using equation (2) in the direct method and equation (7) in the proposed method. The
CPU elapsed time for each one of the experiments has been measured and the results
for both images’ sizes are illustrated in Figure 3.
Figure 3
From the above Figure 3, it can be seen that as the maximum moment order
increases, the time needed to compute the moments, in the direct method is
exponentially increased. The recursive algorithm, introduced in the current paper,
needs less CPU time, to compute the moments of the same order than the original
method. This observation, justifies experimentally, what has already been stated in
section 3.1, where the computational complexity of the algorithm proved to be of very
low order.
Although, one may expect the evolution of the computational time be linear, since
the computational complexity of the recursive algorithm is linear O(p), in respect to
the number of the required multiplications, this is not justified in Figure 3. This

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
13
happens due to the fact that Figure 3 shows the computation time of computing an
entire set of moments where a lot of additions are included. Additionally, the timer
used to measure the computation time does not have high accuracy due to software
limitations of the computer being used (IBM PC compatible 2.8GHz, with C++
Builder). These are the reasons why the computational curve of the proposed method
is not linear but it slightly diverges as the order increases.
Apart from the above observations, Figure 3 shows that our algorithm performs
well, although the image size varies and thus its complexity is independent of the
image size being processed.
More precisely, the moments for the two images and for maximum orders 10, 20,
30, 40, 50 have been computed and the CPU elapsed time in each case is presented in
the following Table 1.
Table 1. The CPU elapsed time (ms) for computation of OFMMs up to pmax order
Lena Image
64x64
Lena Image
128x128
Maximum
Order
Direct
Method
Recursive
Method
Direct
Method
Recursive
Method
pmax = 10 1760 640 7160 2570
pmax = 20 14260 3880 58140 15700
pmax = 30 53930 12000 219710 48730
pmax = 40 144130 27250 588200 110710

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
14
pmax = 50 315590 52100 1286920 211970
The outperformance of the recursive method can also be defined if we calculate the
percentage of the time reduction taking place, as maximum order increases, by using
this method as successor of the direct one.
For this reason, we define the Computation Time Reduction (CTR)- % as follows,
Computation
Time Reduction 100%
Re
Direct
cursiveDirect
Time
TimeTimeCTR (9)
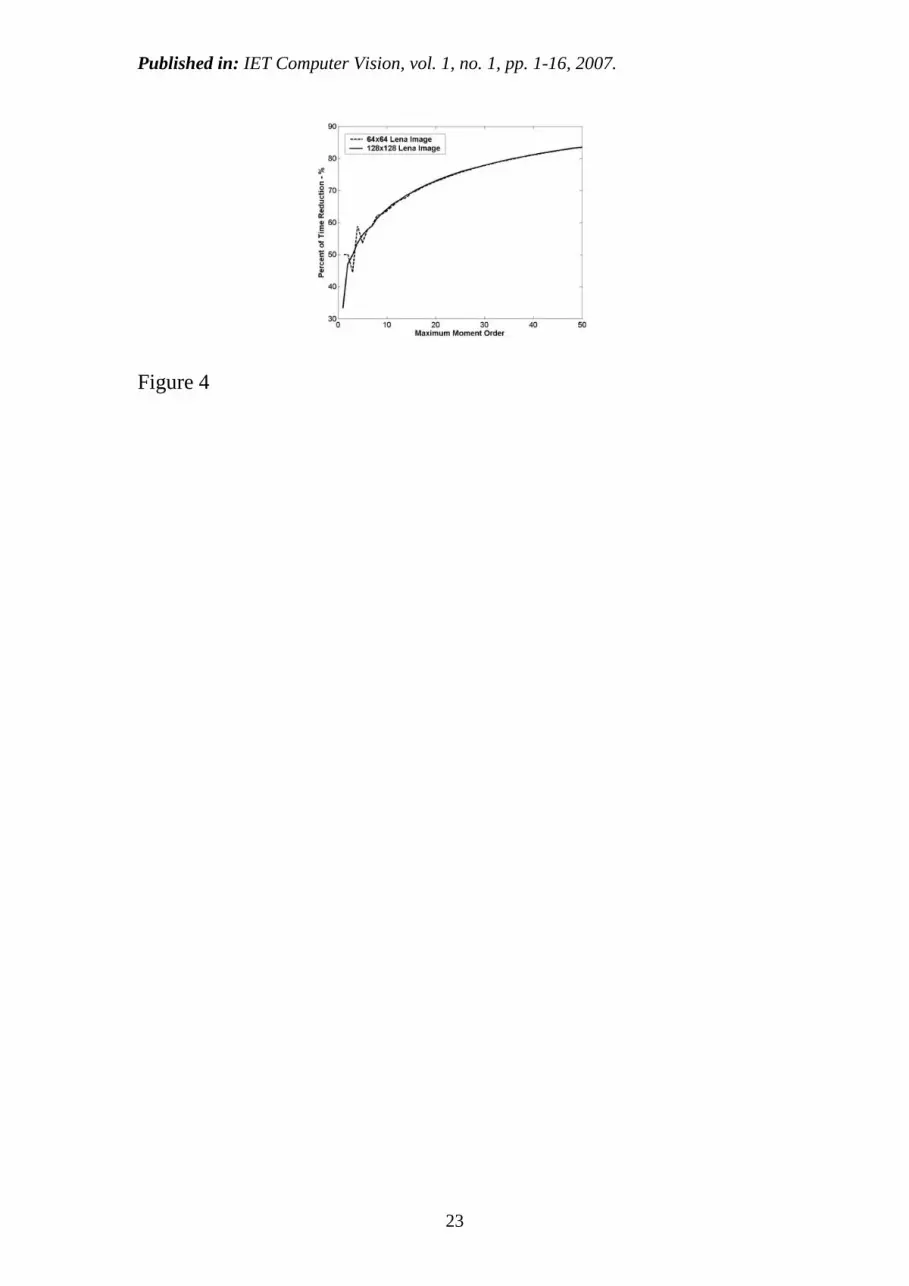
By computing the computation time reduction using (9), for the same experiments
of Figure 3, the following Figure 4 can be drawn,
Figure 4
Figure 4, verifies the benefits of the newly introduced algorithm, in terms of the
computation time reduction, when being used instead of the direct method, for
computing the Fourier-Mellin moments of any image size.
The time reduction curves depicted in Figure 4, for the two image sizes and for
moment orders smaller than 10, are not identical, as it was expected, due to the
accuracy of the timer used to measure the computational time. When the
computational time is quite short the accuracy of the timer significantly influences it
and as the time increases this impact is negligible.
From the above figure, it is impressive to conclude that we have a very significant
computation time reduction, which for high orders goes up to almost over 80%, in
comparison with the original method.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
15
This is a major advantage of the recursive algorithm, since in image representation
one has to compute the moments of an image up to high orders, in order to optimally
reconstruct it, with minimum reconstruction error.
Conclusively, we can claim that by computing the Fourier-Mellin moments up to
an order pmax of any sized image, using the proposed method, the four requirements
declared in section 3, are entirely satisfied.
5. Conclusion
A novel recursive algorithm was proposed in this paper, which computes in a fast
way the orthogonal Fourier-Mellin moments. The structure of the algorithm prevents
also, overflow conditions to occur. The computational complexity of the proposed
algorithm is linear O(p) in multiplications while the original direct method is of O(p2)
complexity. Therefore, the computation time required to compute the moments of a
high order, can be reduced almost over the 80% of the time needed by the direct
method to do the same work, for high moment orders. Additionally, the algorithm
does not generate and propagate finite precision errors as some traditional recursive
algorithms do. Also, it is capable to compute an individual moment without needing
the computation of intermediate moments, for pattern classification purposes. The
experimental results justify the effectiveness of this new algorithm and establish it, as
an appropriate successor of the direct method, used until now.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
16
Appendix
Derivation of the Recursive Formulas
Let us define the fractional term of order p and index k, which is used in summation
for computing the radial polynomial Qp of (2) as follows,
!1!!
!1
kkkp
kpTpk A.1
The fractional term for the previous index of the summation (k-1), has the form,
!!1!1
!1
kkkp
kpT kp
A.2
Now, if we restrict our study for indices k≠0, we can use the property of the factorials
0,!1! nnnn A.3
for transforming equation (A.2), as follows
11
1
11
1
!1!!
!1
!1!1!!1
1!1
!!1!1
!1
kpkp
kkT
kpkp
kk
kkkp
kp
kkkpkkpkp
kkkp
kkkp
kpT
pk
kp

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
17
A.4
The above equation can be written, in a more suitable form, as
1
1
11
kppk T
kk
kpkpT A.5
which holds for k = 1,2,3,…,p, and is identical to (8a) introduced in section 3.
Finally, for k=0, equation (A.1), gives
1
!
1!
!1!0!
!10
p
p
pp
p
pTp A.6
References
[1] Mukundan, R. and Ramakrishnan, K.R.: ‘Moment Functions in Image
Analysis’, (World Scientific Publisher, 1998).
[2] The, C.-H. and Chin, R.T.: ‘On Image Analysis by the Methods of Moments’,
IEEE Trans. on. Pattern Anal. Machine Intell., 1998, 10, (4). pp. 496-513.
[3] Teague, M.: ‘Image analysis via the general theory of moments’, J. Opt. Soc.
Amer., 1980, 70, (8), pp. 920-930.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
18
[4] Khotanzad, A. and Lu, J.-H.: ’Classification of Invariant Image
Representations Using a Neural Network’, IEEE Trans. on Acoustics, Speech
and Sign. Processing, 1990, 38, (6), pp. 1028-1038.
[5] Khotanzad, A. and Hong, Y.H.: ‘Invariant Image Recognition by Zernike
Moments’, IEEE Trans. on. Pattern Anal. Machine Intell., 1990, 12, (5), pp.
489-497.
[6] Papakostas, G.A., Karras, D.A., Mertzios, B.G. and Boutalis, Y.S.: ‘An
Efficient Feature Extraction Methodology for Computer Vision Applications
using Wavelet Compressed Zernike Moments’, ICGST International Journal
on Graphics, Vision and Image Processing, Special Issue: Wavelets and Their
Applications, 2005, SI1, pp.5-15.
[7] Chong, C.W., Raveendran, P. and Mukundan, R.: ‘A comparative analysis of
algorithms for fast computation of Zernike moments’, Pattern Recognition,
2003, 36, (3), pp. 731-742.
[8] Belkasim, S.O., Ahmadi, M. and Shridhar, M.: ‘Efficient Algorithm for Fast
Computation of Zernike Moments’, J. Franklin Institute., 1996, 333(B), (4),
pp. 577-581.
[9] Gu, J., Shu, H.Z., Toumoulin, C. and Luo, L.M.: ‘A novel algorithm for fast
computation of Zernike moments’, Pattern Recognition, 2002, 35, (12), pp.
2905-2911.
[10] Prata, A., and Rusch, W.V.T.: ‘Algorithm for Computation of Zernike
Polynomials Expansion Coefficients’, Appl. Opt., 1989, 28, pp. 749–754.
[11] Kintner, E.C.: ‘On the Mathematical Properties of the Zernike Polynomials’,
Opt. Acta, 1976, 23, (8), pp. 679–680.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
19
[12] Chong, Chee-Way, Mukundan R., Raveendran P.: ‘An efficient Algorithm for
fast computation of Pseudo-Zernike Moments’, Proc. Int. Conf. Image and
Vision Computing, New Zealand, 2001, pp. 237-242.
[13] Papaodysseus, C. N., Koukoutsis, E.B. and Triantafyllou, C.N.: ‘Error Sources
and Error Propagation in the Levinson-Durbin Algorithm’, IEEE Trans. Signal
Processing, 1993, 41, (4), pp. 1635-1651.
[14] Papaodysseus, C.N., Carayannis, G., Koukoutsis, E.B. and Kayafas, E.:
‘Comparing LS FIR Filtering and l-Step Ahead Linear Prediction’, IEEE
Trans. Signal Processing, 1993, 41, (2), pp. 768-780.
[15] Papaodysseus, C., Koukoutsis, E. and Vassilatos, C.: ‘Error Propagation and
Methods of Error Correction in LS FIR’, IEEE Trans. Signal Processing,
1994, 42, (5), pp. 1097-1108.
[16] Sheng, Y. and Shen, L.: ‘Orthogonal Fourier-Mellin Moments for Invariant
Pattern Recognition’, J. Opt. Soc. Am., 1994, 11, pp.1748-1757.
[17] Kan, C. and Srinath, M.D.: ‘Invariant Character Recognition with Zernike and
Orthogonal Fourier-Mellin Moments’, Pattern Recognition, 2002, 35, (1), pp.
143-154.
[18] Terrillon, J.C., McReynolds, D., Sadek, M., Sheng, Y. and Akamatsu, S:
‘Invariant Neural-Network based Face Detection with Orthogonal Fourier-
Mellin Moments’, Proc. Int. Conf. Pattern Recognition, 2000.
[19] Papakostas, G.A., Boutalis, Y.S., Karras, D.A. and Mertzios, B.G.: ‘On the
Reconstruction Performance of Compressed Orthogonal Moments’, Proc. Int.
Conf. Informatics in Control, Automation and Robotics, Setubal, Portugal,
August 2004, pp. 468-474.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
20
[20] Papakostas, G.A., Boutalis, Y.S., Papaodysseus, C.N. and Fragoulis, D.K.:
‘Numerical Error Analysis in Zernike Moments Computation’, Image and
Vision Computing, 2006, 24, (9), pp.960-969.
[21] Papakostas, G.A., Boutalis, Y.S. and Mertzios, B.G.: ‘Evolutionary Selection
of Zernike Moment Sets In Image Processing’, Proc. Int. Workshop Systems,
Signals and Image Processing, Prague, Czech Republic, September 2003.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
21
Figure Captions
Figure. 1
Computed fractional terms using (a) Direct Method and (b) Recursive Method.
Figure 2.
Lena’s grey level images of (a) 128x128 and (b) 64x64 pixels.
Figure 3.
The CPU elapsed time (ms) for various maximum moment orders of (a) 64x64 and (b)
128x128 Lena’s images
Figure 4.
The % of the computation time reduction for (a) 64x64 and (b) 128x128 Lena’s
images.

Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
22
Figures
(a)
(b)
Figure 1
(a) (b)
Figure 2
(a)
(b)
Figure 3
Published in: IET Computer Vision, vol. 1, no. 1, pp. 1-16, 2007.
23
Figure 4





























