Embed Size (px)
Citation preview
Applying mul+‐agent systems to simulate dynamic control in flexible manufacturing scenarios
Authors: Rodrigo A. M. Braga ([email protected]) Rosaldo J. F. RosseD ([email protected]) Luís Paulo Reis Eugénio C. Oliveira
19th European Meetings on Cybernetics and Systems Research
LIACC / Faculty of Engineering University of Porto
Rua Dr. Roberto Frias, s/n 4200‐465 Porto, Portugal
EMCSR 2008 March 25 ‐ 28, 2008 University of Vienna

SUMMARY
Objec+ve
Introduc+on
The Prototyping Framework
System Descrip+on
Experiments and Results
Conclusions
3
4
6
8
17
20
OBJECTIVES
Developmentofa simula0onsystem fordynamic controlfor dispatching, scheduling transports and tasks for a systemcontrollingAGVsinaFMS.
Design management system for parts transfer andproduc0on, i.e., agent coopera0on for transporta0on tasknego0a0onandproduc0onmachinenego0a0on
Useofthemul0agentparadigmtryingtoefficientlysolvethisproblem
Use of the JADE tool for crea0ng and controlling thesystemagents.
SUMMARY
Objec+ve Introduc+on The Prototyping Framework System Descrip+on Experiments and Results Conclusions
3 4 6 8 16 19

INTRODUCTION
Mul0‐agentsystems(MAS)arebeingusedinanincreasinglywidevarietyofapplica0onareas[1]:
• electroniccommerce;
• manufacturing;
• informa0onfindingandfiltering;
• planningandresourcealloca0on;• servicesintegra0on.
SUMMARY
Objec+ve Introduc+on The Prototyping Framework System Descrip+on Experiments and Results Conclusions
3 4 6 8 16 19
INTRO
DUCTIO
N con+nue....
Manufacturing companies are facing radicalchallenges[2].
• worldwidecompe00on;
• customers desire for exclusive product variety in small
quan00es(masscustomiza0on);
• demandforhigherqualityandlowerprices;
• productcomplexity;
• fasterdelivery0mes;• shorter product life cycle as well as faster technologicalevolu0onandnewenvironmentprotec0onregula0ons.

The Prototyping Framework
ThemaindevelopmenttoolusedinthisworkwasJADE.
JADE is a framework to develop mul+‐agent systems in compliance with the FIPA specifica+ons [19].
Fornego0a0onamongagents,FIPAContractNetInterac0onProtocolwasused.
SUMMARY
Objec+ve Introduc+on The Prototyping Framework System Descrip+on Experiments and Results Conclusions
3 4 6 8 16 19

PROTO
COLS, EN
VIRO
NMEN
T AND TO
OLS
Development Environments
Behaviours used were: • CiclicBehaviours; • SimpleBehaviours.
This work was based on a simple example presented in JADE tutorial [20]. • agents selling books; • agents buying books.
Graphical interface by JADE - Remote Agent Management

PROTO
COLS, EN
VIRO
NMEN
T AND TO
OLS
Protocol Used
8RodrigoAntonioMarquesBraga
The Contract Net protocol is a high‐
level protocol for achieving efficient
coopera+on through task sharing in
networks of communica+ng problem
solvers.

SYSTEM DESCRIPTION SU
MMARY
Objec+ve Introduc+on The Prototyping Framework System Descrip+on Experiments and Results Conclusions
3 4 6 8 17 20

SYSTEM
DESCRIPTIO
N Con+nue...
• Architecture of developed system.

SYSTEM
DESCRIPTIO
N Con+nue...
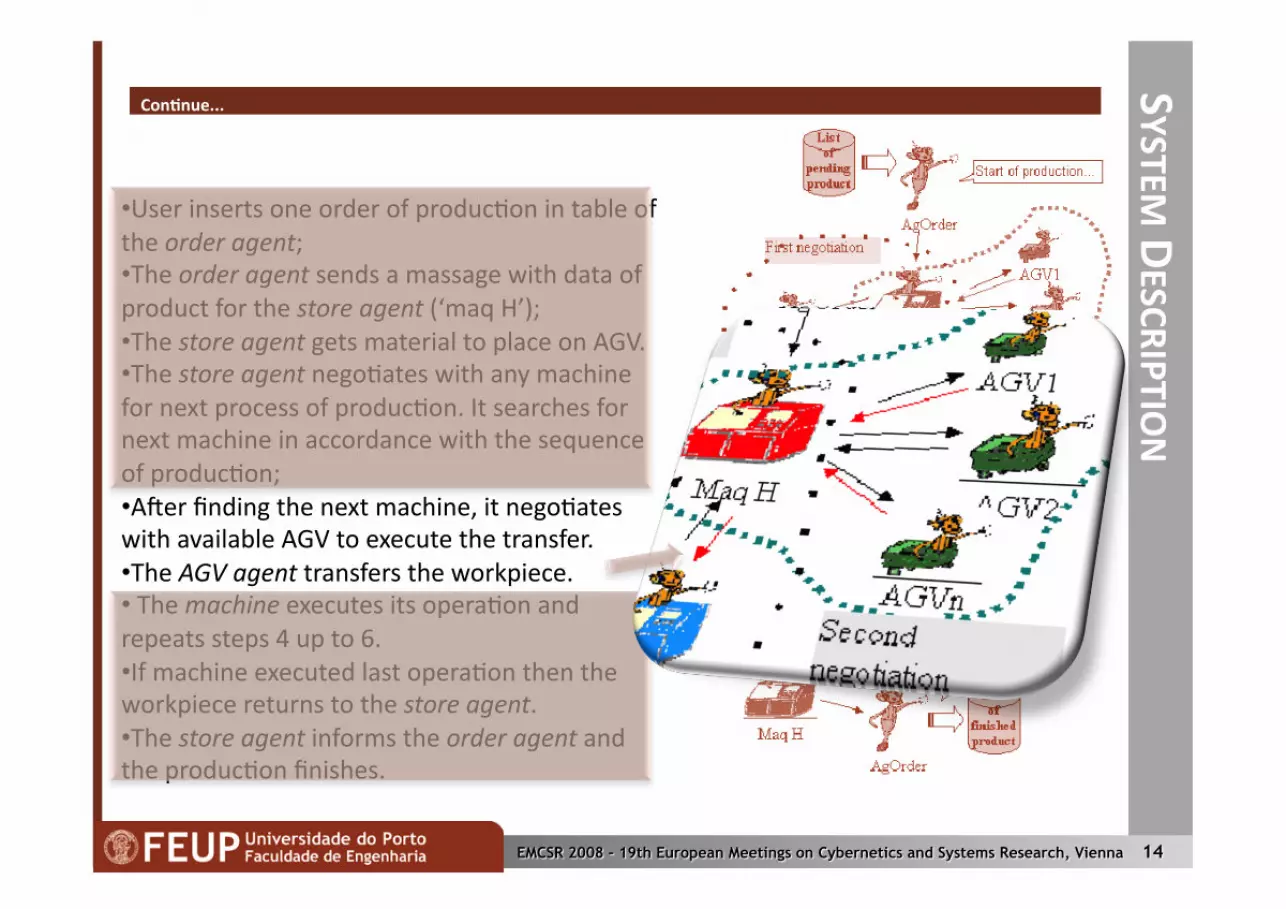
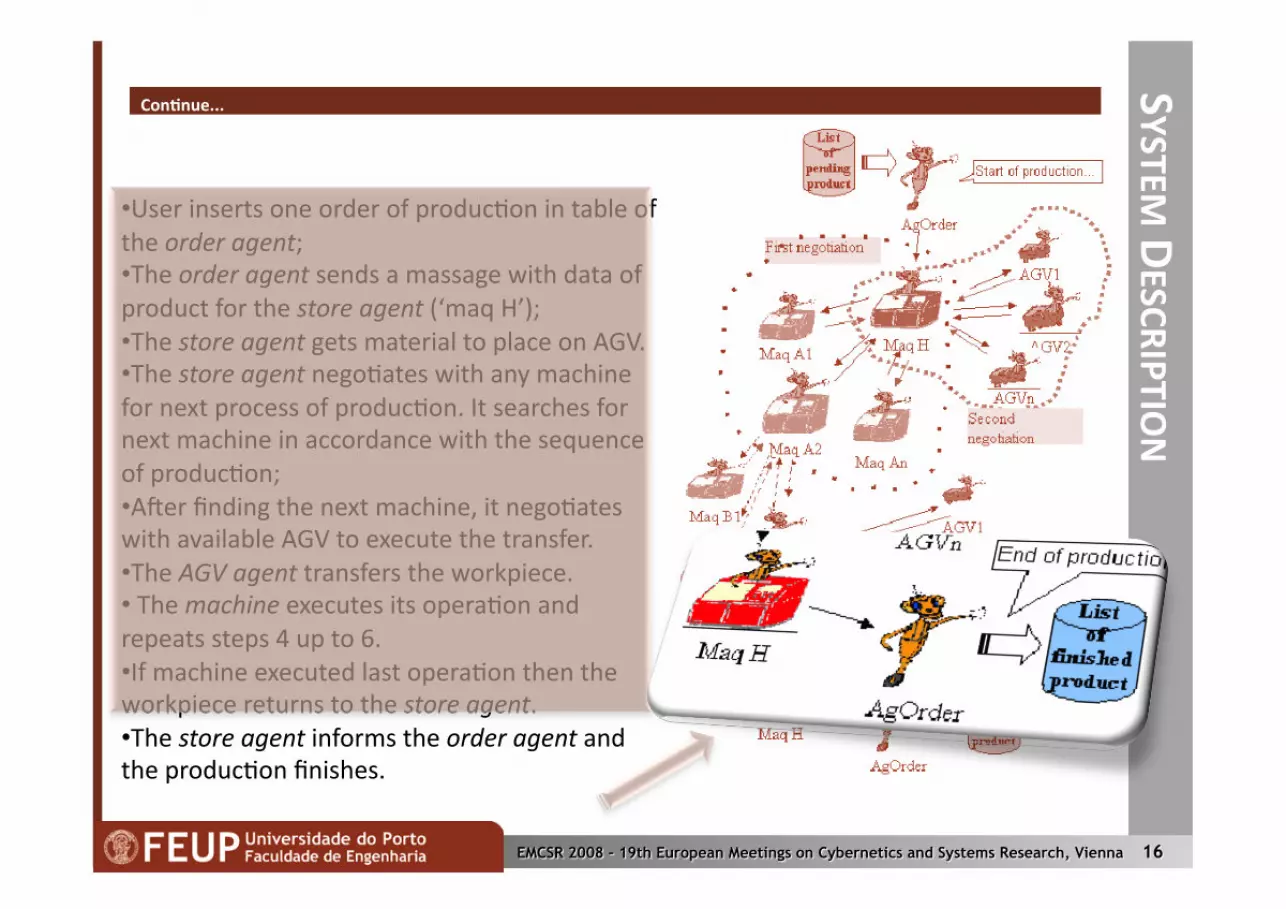
• Userinsertsoneorderofproduc0onintableoftheorder agent;• Theorder agentsendsamassagewithdataofproductforthe store agent (‘maqH’);• Thestore agent getsmaterialtoplaceonAGV.• Thestore agentnego0ateswithanymachinefornextprocessofproduc0on.Itsearchesfornextmachineinaccordancewiththesequenceofproduc0on;• A^erfindingthenextmachine,itnego0ateswithavailableAGVtoexecutethetransfer.• TheAGV agent transferstheworkpiece.• Themachine executesitsopera0onandrepeatssteps4upto6.• Ifmachineexecutedlastopera0onthentheworkpiecereturnstothestore agent.• Thestore agentinformstheorder agentandtheproduc0onfinishes.

• Userinsertsoneorderofproduc0onintableoftheorder agent;• Theorder agentsendsamassagewithdataofproductforthe store agent (‘maqH’);• Thestore agent getsmaterialtoplaceonAGV.• Thestore agentnego0ateswithanymachinefornextprocessofproduc0on.Itsearchesfornextmachineinaccordancewiththesequenceofproduc0on;• A^erfindingthenextmachine,itnego0ateswithavailableAGVtoexecutethetransfer.• TheAGV agent transferstheworkpiece.• Themachine executesitsopera0onandrepeatssteps4upto6.• Ifmachineexecutedlastopera0onthentheworkpiecereturnstothestore agent.• Thestore agentinformstheorder agentandtheproduc0onfinishes.
SYSTEM
DESCRIPTIO
N Con+nue...

• Userinsertsoneorderofproduc0onintableoftheorder agent;• Theorder agentsendsamassagewithdataofproductforthe store agent (‘maqH’);• Thestore agent getsmaterialtoplaceonAGV.• Thestore agentnego0ateswithanymachinefornextprocessofproduc0on.Itsearchesfornextmachineinaccordancewiththesequenceofproduc0on;• A^erfindingthenextmachine,itnego0ateswithavailableAGVtoexecutethetransfer.• TheAGV agent transferstheworkpiece.• Themachine executesitsopera0onandrepeatssteps4upto6.• Ifmachineexecutedlastopera0onthentheworkpiecereturnstothestore agent.• Thestore agentinformstheorder agentandtheproduc0onfinishes.
SYSTEM
DESCRIPTIO
N Con+nue...
• Userinsertsoneorderofproduc0onintableoftheorder agent;• Theorder agentsendsamassagewithdataofproductforthe store agent (‘maqH’);• Thestore agent getsmaterialtoplaceonAGV.• Thestore agentnego0ateswithanymachinefornextprocessofproduc0on.Itsearchesfornextmachineinaccordancewiththesequenceofproduc0on;• A^erfindingthenextmachine,itnego0ateswithavailableAGVtoexecutethetransfer.• TheAGV agent transferstheworkpiece.• Themachine executesitsopera0onandrepeatssteps4upto6.• Ifmachineexecutedlastopera0onthentheworkpiecereturnstothestore agent.• Thestore agentinformstheorder agentandtheproduc0onfinishes.
SYSTEM
DESCRIPTIO
N Con+nue...

• Userinsertsoneorderofproduc0onintableoftheorder agent;• Theorder agentsendsamassagewithdataofproductforthe store agent (‘maqH’);• Thestore agent getsmaterialtoplaceonAGV.• Thestore agentnego0ateswithanymachinefornextprocessofproduc0on.Itsearchesfornextmachineinaccordancewiththesequenceofproduc0on;• A^erfindingthenextmachine,itnego0ateswithavailableAGVtoexecutethetransfer.• TheAGV agent transferstheworkpiece.• Themachine executesitsopera0onandrepeatssteps4upto6.• Ifmachineexecutedlastopera0onthentheworkpiecereturnstothestore agent.• Thestore agentinformstheorder agentandtheproduc0onfinishes.
SYSTEM
DESCRIPTIO
N Con+nue...
• Userinsertsoneorderofproduc0onintableoftheorder agent;• Theorder agentsendsamassagewithdataofproductforthe store agent (‘maqH’);• Thestore agent getsmaterialtoplaceonAGV.• Thestore agentnego0ateswithanymachinefornextprocessofproduc0on.Itsearchesfornextmachineinaccordancewiththesequenceofproduc0on;• A^erfindingthenextmachine,itnego0ateswithavailableAGVtoexecutethetransfer.• TheAGV agent transferstheworkpiece.• Themachine executesitsopera0onandrepeatssteps4upto6.• Ifmachineexecutedlastopera0onthentheworkpiecereturnstothestore agent.• Thestore agentinformstheorder agentandtheproduc0onfinishes.
SYSTEM
DESCRIPTIO
N Con+nue...

Experiments and Results
To ease results demonstration this simulation has been carried out with only two workpieces of four different products.
In this test five machines were used: • 2 operations type ‘A’ (“maq1” and “maq11”) • 2 operations type ‘B’ (“maq2” and “maq22”) • 2 AGVs ( “agv1” and “agv2”) • 1 Storage (“maq0”)
The products are produced in the following machine sequence:
• P1 and P2 - only operation type ‘A’; • P3 and P4 - only operation type ‘B’; • P5 and P6 - operation ‘A’ and ‘B’ respectively; • P7 and P8 - operation ‘B’ and ‘A’ respectively.
SUMMARY
Objec+ve Introduc+on The Prototyping Framework System Descrip+on Experiments and Results Conclusions
3 4 6 8 17 19

Experiments and Results
Con+nue...
Table 1. Sequence of production.
Table 2. Statistics of production.
Experiments and Results
Con+nue...

Conclusions
• JADE allowed an easy and fast implementation of this system simulation control.
• Solution for the dynamic control problem through the use of “agents selling books and agents buying books” principle [21].
• Cost (utility) equations for tasks implemented in this system, allowed that scheduling of machine tasks were balanced. The approach results in a distributed and balanced use of machines in the shop floor.
• We are now using ideas and concepts discussed in this work to feature dispatching and scheduling abilities within intelligent wheelchairs in hospital environments
SUMMARY
Objec+ve Introduc+on The Prototyping Framework System Descrip+on Experiments and Results Conclusions
3 4 6 8 16 20

• I would like to thank: – CAPES for financing my doctoral studies
Acknowledgment
References
• The references are in the paper
Contacts
• Rodrigo Antonio Marques Braga, e-mail: [email protected] • FEUP / LIACC‐Ar+ficial Intelligence and Computer Science Lab‐Room:I124
Ques+ons?





























