Embed Size (px)
Citation preview
1 API CFAR PROCESSORS WITH HOUGH TRANSFORM IN
MULTIPATH SITUATION
Chr. Kabakchiev, L. Doukovska, I. Garvanov
Abstract
In this paper we study the comparison between efficiency of Adaptive Post detection
Integration Constant False Alarm Rate (API CFAR) detector and Hough detector with non–
coherent integration in multipath situation. For comparison, we use the approach by Rohling for
calculation the losses [11]. This paper unifies the results of a broad research of the losses
(profits), when using several types of detectors, carried out in some previous contributions of the
team [10,12,14,15,16]. In the present research the results of the comparative analysis of the
proposed in [9,13] Hough detector with non–coherent integration in multipath situation is
considered. The losses are determined as a statistical estimation by means of the probability
characteristics of the both types detectors, obtained in Matlab. The profits of the Hough detectors
are calculated for different values of false alarm probability, a different number of observations
in the reference window, an average interference-to-noise ratio (INR) and probability for
appearance of multipath situation with average length in the cells in range. Our results show that
Hough transform is effective in condition of decrease multipath situation.
1. Introduction
In the modern radar, the target detection is declared if the signal value exceeds a
preliminary determined adaptive threshold. Current estimating the noise level in the reference
window forms the threshold. As an estimate of the noise level is often used the estimate proposed
by Finn and Johnson in [5]. Averaging the outputs of the reference cells surrounding the test cell
forms this estimate. Thus a constant false alarm rate is maintained in the process of detection.
The detection performance of CFAR processors with post detection integrator is proposed
by Hou in [4] for the case of homogeneous environment and chi-square family of fluctuating
target models (Swerling I, II, III, IV).
During the last few years, mathematical methods for extraction of useful data about the
behavior of observed targets by mathematical transformation of received signals are being widely
used for design of new highly effective algorithms for processing of radar information. Such a
mathematical approach is the Hough Transform (HT). The concept of using the HT for
improving of target detection in white Gaussian noise is introduced by Carlson, Evans and
Wilson in [1, 2, 3]. This approach is use by Carlson in [3], for a highly fluctuating target -
Swerling II type target model, and stationary homogeneous interference.
The Hough transform of the data obtained from the Excision Cell Averaging Constant
False Alarm Rate with Binary Integration (EXC CA CFAR BI) detector for several past scans
and binary integration of the performed data in Hough parameter space additionally improve
target detection in conditions of multipath situation. The effectiveness of such an adaptive Hough
detector with binary integration (AHBI detector) is analyzed in [8]. In [9] a new binary CA
CFAR Hough detector (AHTBI) where signal detection are realized by a CA CFAR detector with
adaptive non-coherent pulse-to-pulse integration is proposed. In [10], using the approach in [3],
new results for detection performance in Hough space are obtained. These results concern two
types of target models as follows: fast fluctuating target - Swerling I case and slowly fluctuating
This work is supported by the Bulgarian National Science Fund under Grant № TH – 1305/2003 and IIT –
010059/2004.

2
target - Swerling III case in conditions of stationary interference with known or unknown
intensities.
In our paper, we study situation for a highly fluctuating target - Swerling II type target
model detection in conditions of multipath situation. In [8, 9, 10] the detectability losses are
calculated when compare to detectors in condition of pulse jamming and without pulse jamming.
In our paper we compare API Hough detector with optimal detector, using the approach from [7].
In [9] is shown higher effectiveness of AHBI and Cell Averaging Constant False Alarm
Rate with Binary Integration (CA CFAR BI) in strong pulse jamming, indirectly. The comparison
between the two patterns is made separately for every one without pulse jamming. The choice of
the best effective pattern supposes a comparison towards a total model, for example the optimal
detector [7, 11] or one towards another. In this paper we research the effectiveness of HT API
CFAR processor in multipath situation for PD=0.5. We estimate the effectiveness of HT API
CFAR with the method from [9], i.e. the sensibility towards multipath situation, the effectiveness
towards API CFAR detector. These estimates allow the comparison of HT API CFAR towards
API CFAR and the comparison towards another patterns researched from other authors.
To achieve a constant value of the probability of false alarm (PFA), in this paper, the value
of the threshold constants, when guarantee it, are determined for different number of
observations in the reference window, an average interference-to-noise ratio (INR) and
probability for appearance of multipath situation with average length in the cells in range.
The losses (profits) of the Hough detectors are calculated for different values of false
alarm probability, a different number of observations in the reference window, an average
interference-to-noise ratio (INR) and probability for appearance of multipath situation with
average length in the cells in range. Our results show that Hough transform is effective in
condition of decrease multipath situation.
2. Signal model in multipath situation
Let us assume that L pulses hit the target, which is modeled according to Swerling case
II. The received signal is sampled in range by using " "M 1 resolution cells resulting in a
matrix with " "M 1 rows and " "L columns. Each column of the data matrix consists of the
values of the signal obtained for " "L pulse intervals in one range resolution cell. Let us also
assume that the first " "M 2 and the last " "M 2 rows of the data matrix are used as a reference
window in order to estimate the "noise-plus-interference" level in the test resolution cell of the
radar. In this case the samples of the reference cells result in a matrix X of the size " "M L .
The test cell or the radar target image includes the elements of the " "M 2 1 row of the data
matrix and is a vector Z of the length L . In the presence of multipath situation the elements of
the reference window are drawn from two classes. One class represents the noise only with the
probability 1 0 . The other class represents the interference-plus-noise with the probability
0 . The elements of the reference window are independent random variables with the compound
exponential distribution law:
Nir
x
r
xxf
j
i
j
i
i ,1,1
exp1
exp1
00
0
00
0
(1)
where N ML and o is the average power of the receiver noise, rj o/ is the average per
pulse value of the interference-to-noise ratio (INR) at the receiver input, 0 is the probability for
the appearance of multipath situation with average length in the range cells. In the presence of a
desired signal from a target the elements of the test resolution cell are independent random
variables with the following distribution law:

3
Llsr
x
srs
x
sxf
j
l
j
l
l ,1,1
exp11
exp1
1
0
0
0
0
0
0
0
0
0
(2)
where s is the per pulse average signal-to-noise ratio, 0 is the average power of the receiver
noise, r j is the average interference-to-noise ratio, 0 is the probability for the appearance of
multipath situation with average length in the range cells.
3. Statistical analysis of API CFAR detector in multipath situation
Before pulse-to-pulse integration, we can censor the elements of the reference window
and the test resolution cells in order to form the adaptive threshold (Fig.1). For realizing this, we
will use the adaptive censoring algorithm proposed in [17]. According to this algorithm, all
elements with high intensity of signal are removed from the reference window and the test
resolution cell.
Figure 1. Block diagram of active adaptive post detection integration (API) CFAR processor
The censoring algorithm consists of the following stages:
Stage 1: The elements of the reference window Nxxxx ,...,, 21
and the test resolution
cell Lxxxx 002010 ,...,,
are rank-ordered according to increasing magnitude.
111
2
1
1 ...... Ni xxxx and 1
0
1
0
1
02
1
01 ...... Li xxxx (3)
Stage 2: Each of the so ranked elements is compared to the adaptive threshold, according
to the following rule:
1,...,1,1
1 NiTsx x
i
x
ii and 1,...,1,001
1 LlTsxx
l
x
ll (4)
where
i
m
m
x
i xs1
1 and
l
m
m
x
l xs1
1
00 .
x M ... x M/2+1 x 01 x M/2 ...
x1
x M ... x M/2+1 x 02 x M/2... x 1
x M ... x M/2+1 x 0L x M/2 ... x
1
S
O
R
T
A
N
D
C
E
N
S
O
R
SORT AND CENSOR
x 1 < x 2 < …< x NL
*
1
1
00
l
l
lxq
*
1
1k
i
ixV
T
1
0
PULSE JAMMING
PARAMETER ESTIMATION
SCALL
FACTOR
CHOOSEN
SLD
SLD
SLD

4
The scale factors x
iT and ox
lT are determined in accordance with the given level of
probability of false censoring ( cen
fP ), as in [13]:
ix
i
cen
fa
iNTi
NP
1
1 and
lx
l
cen
fa
lLTl
LP
01
1 (5)
The recursive procedure is stopped when the condition (4) becomes true. In this way the
samples of the reference window and the test resolution cell are divided into two parts. The first
part contains the “clean” elements, i.e. without multipath situation. All these elements can be
used for calculating the estimate V and the summed signal 0q .
*
1
1k
n
nxV and
*
1
1
00
l
n
nxq (6)
After the stop of the recursive procedure, it is assumed that most or all of the random
impulses of multipath situation are in the second part of the reference window and the test
resolution cell. In this case the probability of target detection in the presence of binomial
distribution, multipath situation may be calculated as in [6], using the following expression:
1
0
00
1
0
0
1
00
1
0
000
1
1 1
1
0
0000
1
1
1
11
1
1
1
111
111
1
1
1111
L
i
iN
j
j
N
j
jiLN
l
i
iN
j
N
j
iNL
l
lLl
ik
j
k
j
iL
i
LkNkN
k
N
k
L
l
l
iik
kilLlkNk
D
r
srT
r
srT
i
iN
r
sT
r
sT
i
iN
l
L
srTsrTi
ik
k
N
sT
sT
i
ik
l
L
k
NP
(7)
The probability of false alarm is evaluated by (7), setting s 0 .
4. Statistical analysis of Hough detector in multipath situation
Calculating of both basic probability characteristics carries out statistical analysis of the
Hough detector: Hough
FAP - probability of false trajectory detection and Hough
DP - probability of true
trajectory detection.
All indications for signal detection obtained from HoughN range resolution cells and N s
scans are arranged in a matrix of the size N N s in (r-t) space. In this space stationary or
constant radar velocity target pears as a straight line which consist of nonzero elements of . Let
as assume that ijnm is a set of such nonzero elements of that constitute a straight line in (r-t)
space that is i j ij
nm, . This line may be represented in Hough parameter space as a point
n m, . Denoting N nm as the maximal size of ijnm , the cumulative false alarm probability for a
cell n m, is written according to [3]:

5
PN
lP Pfa
nm nm
fa
l
fa
N l
l K
Nnm
nm
1 (8)
where K is a linear trajectory detection threshold.
The total false alarm probability in Hough parameter space is equal to one minus the
probability that no false alarm occurred in any of the Hough cell. For independent Hough cells
this probability is:
)max(
)(11
nm
nm
nm
N
KN
NWnm
fa
Hough
FA PP (9)
where max Nnm is the accessible Hough space maximum and W Nnm is the number of cells
from Hough parameter space whose values are equal to Nnm .
The cumulative probability of target detection in Hough parameter space Hough
DP cannot
be written in the form of a simple Bernouli sum. As a target moves with respect to the radar, the
SNR of the received signal changes depending on the distance to the target and the probability of
a pulse P jD( ) changes as well. Then the probability Hough
DP can by calculate by Brunner’s
method.
Let P jD( ) be the primitive probability of detection from the k-th time scan and P i j( , ) is
the cumulative probability of getting exactly i detection from j looks at the target. Then we
have:
)1,1().(),(
)1,1().()1,(.)(1),(
)1,0(.)(1),0(
jjPjPjjP
jiPjPjiPjPjiP
jPjPjP
D
DD
D
(10)
By means of Brunner’s method we obtain a matrix of size 20X20, the elements of which
are the primitive probability of detection from the k-th time slice [3]. Using (4) we can get all the
P i j( , ) needed to calculate PD . For N s scans of monopulse radar we have:
SN
Mi
SD
Hough
D NiPP ),( (11)
There are not many cases, in practice when radar is equipped with a Hough detector
working in multipath situation. In such situations it would be desirable to know the Hough losses
depending on the parameters of the multipath situation, for rating the behavior of the radar. For
the calculation of Hough detector losses, we use the ratio between the two SNR, for a Hough
detector and an API CFAR detector, measured in dB, presented in the expression:
API
HOUGH
SNR
SNRdB log10 under 5.0, API
D
Hough
DDFA PPPconstP (12)
The comparisons are made and towards API CFAR in multipath situation and for a
Hough detector in multipath situation.
6
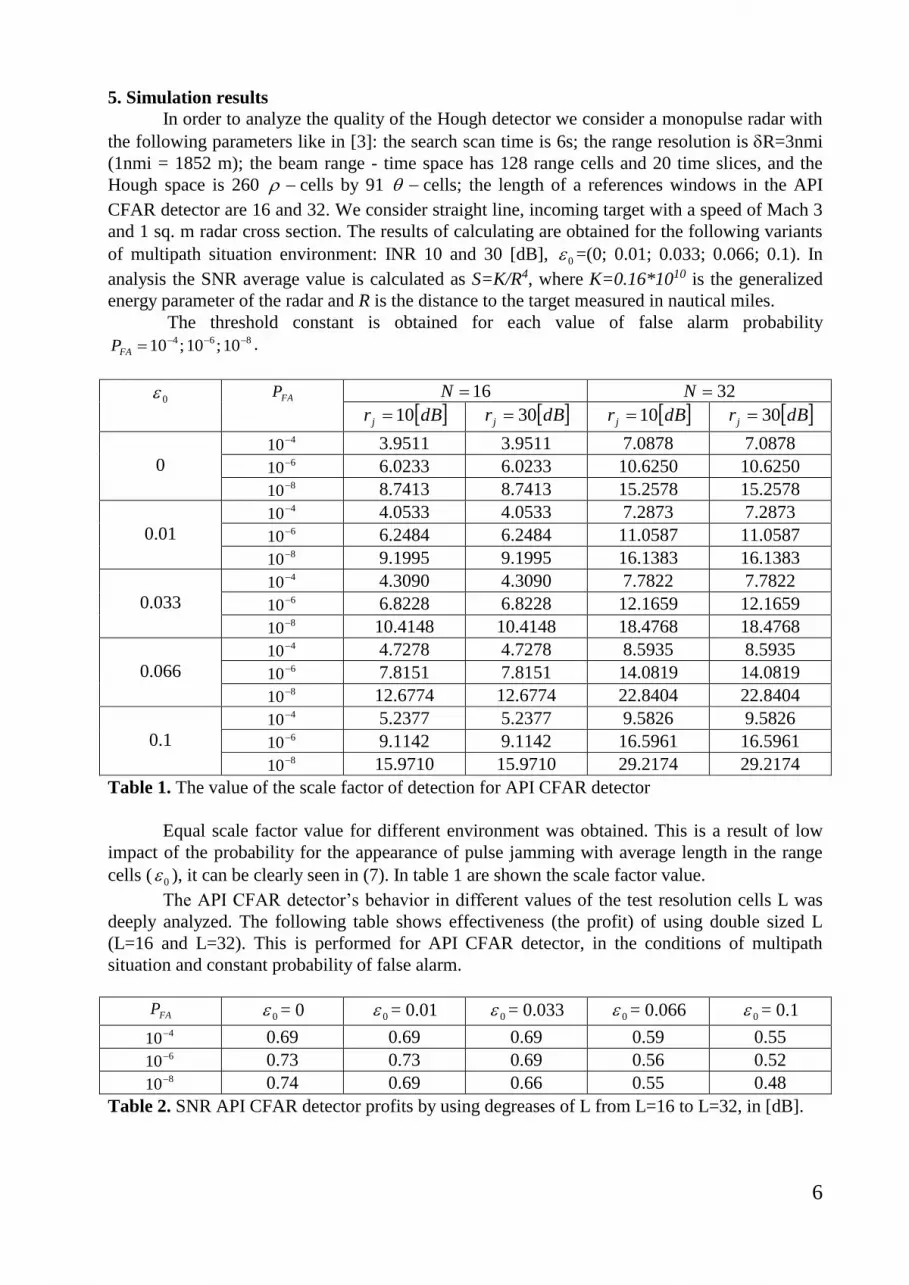
5. Simulation results
In order to analyze the quality of the Hough detector we consider a monopulse radar with
the following parameters like in [3]: the search scan time is 6s; the range resolution is R=3nmi
(1nmi = 1852 m); the beam range - time space has 128 range cells and 20 time slices, and the
Hough space is 260 cells by 91 cells; the length of a references windows in the API
CFAR detector are 16 and 32. We consider straight line, incoming target with a speed of Mach 3
and 1 sq. m radar cross section. The results of calculating are obtained for the following variants
of multipath situation environment: INR 10 and 30 [dB], 0 =(0; 0.01; 0.033; 0.066; 0.1). In
analysis the SNR average value is calculated as S=K/R4, where K=0.16*1010 is the generalized
energy parameter of the radar and R is the distance to the target measured in nautical miles.
The threshold constant is obtained for each value of false alarm probability 864 10;10;10 FAP .
0 FAP 16N 32N
dBr j 10 dBr j 30 dBr j 10 dBr j 30
0
410 3.9511 3.9511 7.0878 7.0878 610 6.0233 6.0233 10.6250 10.6250 810 8.7413 8.7413 15.2578 15.2578
0.01
410 4.0533 4.0533 7.2873 7.2873 610 6.2484 6.2484 11.0587 11.0587 810 9.1995 9.1995 16.1383 16.1383
0.033
410 4.3090 4.3090 7.7822 7.7822 610 6.8228 6.8228 12.1659 12.1659 810 10.4148 10.4148 18.4768 18.4768
0.066
410 4.7278 4.7278 8.5935 8.5935 610 7.8151 7.8151 14.0819 14.0819 810 12.6774 12.6774 22.8404 22.8404
0.1
410 5.2377 5.2377 9.5826 9.5826 610 9.1142 9.1142 16.5961 16.5961 810 15.9710 15.9710 29.2174 29.2174
Table 1. The value of the scale factor of detection for API CFAR detector
Equal scale factor value for different environment was obtained. This is a result of low
impact of the probability for the appearance of pulse jamming with average length in the range
cells ( 0 ), it can be clearly seen in (7). In table 1 are shown the scale factor value.
The API CFAR detector’s behavior in different values of the test resolution cells L was
deeply analyzed. The following table shows effectiveness (the profit) of using double sized L
(L=16 and L=32). This is performed for API CFAR detector, in the conditions of multipath
situation and constant probability of false alarm.
FAP 0 = 0 0 = 0.01 0 = 0.033 0 = 0.066 0 = 0.1
410 0.69 0.69 0.69 0.59 0.55 610 0.73 0.73 0.69 0.56 0.52 810 0.74 0.69 0.66 0.55 0.48
Table 2. SNR API CFAR detector profits by using degreases of L from L=16 to L=32, in [dB].

7
In table 2 are shown SNR profits of the API CFAR detector for target SW2, in [dB],
made for two values of number of test resolution cells. INR is rj 30 [dB], 0 =(0; 0.01; 0.033;
0.066; 0.1), number of reference cells is N=16 and number of test resolution cells is L=16 and
L=32, probability of false alarm is 864 10;10;10 FAP .
In presence paper we offer Hough transform for improvement the API CFAR detector.
Similar approach is proposed in [9], but in this work is not included the offered in [11] approach
for losses estimation in API Hough detector. In this paper we keep a constant probability of false
alarm. An analysis of behavior of API Hough detector in different values of the number of test
resolution cells was performed. The results are presented in table 3.
FAP 0 = 0 0 = 0.01 0 = 0.033 0 = 0.066 0 = 0.1
410 0.35 0.35 0.35 0.34 0.23 610 0.34 0.35 0.46 0.47 0.35 810 0.23 0.23 0.23 0.35 0.35
Table 3. SNR API Hough detector profits by using degreases of L from L=16 to L=32, in [dB].
In table 3 are shown SNR profits by using of the Hough detector for target SW2, in [dB],
made for two values of number of test resolution cells. INR is rj 30 [dB], 0 =(0; 0.01; 0.033;
0.066; 0.1), number of reference cells is N=16, number of test resolution cells is L=16 and L=32,
probability of false alarm is 864 10;10;10 FAP .
In conclusion, a comparative analysis of the API CFAR detector and API Hough detector
working in multipath situation was performed. The losses (profits) of the Hough detector in
multipath situation are determined towards the API CFAR detector, following the algorithm
proposed in [11], for probability of detection 0,5.
The dependence of the profits, on the average interference-to-noise ratio (INR) and the
number of reference cells, for different values of number of test resolution cells and different
values of the probability of false alarm and probability of appearance of multipath situation with
average length in the range cells, is shown in table 4.
LN , FAP 0 = 0 0 = 0.01 0 = 0.033 0 = 0.066 0 = 0.1
16N ,
16L
410 3.47 3.58 3.59 3.53 3.52 610 2.83 2.82 2.82 3.18 2.27 810 2.16 2.26 2.51 2.46 1.63
16N ,
32L
410 3.13 3.23 3.25 3.28 3.20 610 2.44 2.44 2.59 2.49 2.10 810 1.65 1.80 2.08 2.26 1.50
Table 4. SNR profits of the API Hough detector compared to the API CFAR detector, in [dB].
In table 4 are shown profits of the Hough detector compared to the API CFAR detector,
in [dB]. INR is 30 [dB], 0 =(0; 0.01; 0.033; 0.066; 0.1), number of reference cells is N=16 and
number of test resolution cells is L=16 and L=32, probability of false alarm
is 864 10;10;10 FAP .
8
6. Conclusions
The experimental results show the influence of the interference on the detection process,
when having constant false alarm rate in multipath situation.
Using Matlab, the probability functions of the Hough detector for a highly fluctuating
target - Swerling II type target model detection in conditions of multipath situation is calculated
in accordance with the approach, represented in [11]. Profits of the Hough detector are shown for
different values of the probability of false alarm and different number of observations in a
reference window and average interference-to-noise ratio (INR). Using this approach it is very
easy to precisely determine the energy benefit when using given detector.
From this study we can observe the tendency toward higher profit (lower losses) by using
the Hough transform. If we double the test cells L and use only API CFAR detector, we will
obtain less profit than using the API Hough detector in non-doubled cells.
As we know, the API CFAR detector has the best results in moving target detection in
multipath situation than the others CFAR detectors. Applying the Hough transform leads to
increasing the detection results with 3 [dB]. This is a good argument for Hough transform
application in the target detection in multipath situation.
Our results show that Hough transform is effective in condition of decrease multipath
situation.
The results obtained in this paper could be practically used for design of modern radar
systems.
References
1. Carlson B., Evans E., Wilson S. - Search Radar Detection and Track with the Hough
Transform, Part I, IEEE Trans., vol. AES - 30.1.1994, pp. 102 - 108.
2. Carlson B., Evans E., Wilson S. - Search Radar Detection and Track with the Hough
Transform, Part II, IEEE Trans., vol. AES - 30.1.1994, pp. 109 - 115.
3. Carlson B., Evans E., Wilson S. - Search Radar Detection and Track with the Hough
Transform, Part III, IEEE Trans., vol. AES - 30.1.1994, pp. 116 - 124.
4. Hou X., Morinaga N., Namekawa T. - Direct Evaluation of Radar Detection
Probabilities, IEEE Trans., vol. AES - 23.4.1987, pp. 418 - 423.
5. Finn H. M. and Johnson, R. S. - Adaptive detection mode with threshold control as a
function of spatially sampled clutter estimation, RCA Review, 29.3.1968, pp. 414 - 464.
6. Behar, V. - CA CFAR radar signal detection in pulse jamming, Compt. Rend. Acad.
Bulg. Sci., vol. 49 (7), 1996, pp. 57 - 60.
7. Gandhi, P. P. and Kassam, S. A. - Analysis of CFAR processors in non-homogeneous
background. IEEE Trans., vol. AES-24, 4, 1988, pp. 443 - 454.
8. Behar V., Vassileva B., Kabakchiev Chr. - Adaptive Hough Detector with Binary
Integration in Pulse Jamming, ECCTD'97, Budapest, 1997, pp. 885 - 889.
9. Behar V. and Chr. Kabakchiev - Hough detector with adaptive non-coherent
integration for target detection in pulse jamming, IEEE fifth inter. symp., ISSSTA'98, Sun City,
South Africa, 1998, pp. 1003 - 1008.
10. Behar, V., Chr. Kabakchiev and L. Doukovska - Target Trajectory Detection in
Monopulse Radar by Hough Transform, Compt. Rend. Acad. Bulg. Sci., vol. 53, №8, 2000, pp.
45 - 48.
11. Rohling H. - Radar CFAR thresholding in clutter and multiple target situation, IEEE
Trans., vol. AES-19, 4, 1983, pp. 608 - 621.
12. Kabakchiev Chr., L. Doukovska and I. Garvanov - Comparative analysis of loses of
CA CFAR processors in pulse jamming, Cybernetics and Information Technologies, 1, 2001, pp.
21 - 35.
9
13. Behar, V., Kabakchiev, Chr. and Doukovska, L. - Adaptive CA CFAR Processor for
Radar Target Detection in Pulse Jamming, Journal of VLSI Signal Processing 26, 2000, pp.383 -
396.
14. Кабакчиев Хр., В. Бехар, Л. Дуковска - Адаптивен CA CFAR процесор за
откриване на радиолокационни изображения в условията на хаотични импулсни
смущения, сп. “Електротехника и електроника”, № 7/8, 1998, стр. 26 - 35.
15. Бехар В., Хр. Кабакчиев, Л. Дуковска, И. Гарванов - Анализ на процесори
поддържащи постоянна честота на лъжлива тревога в условията на нехомогенни импулсни
смущения, Научни известия на НТС, Младежка научна сесия’ 2000, стр. 244 - 249.
16. Бехар В., Хр. Кабакчиев, И. Гарванов, Л. Дуковска - Осреднени характеристики
на различни устройства поддържащи постоянна честота на лъжлива тревога в условията
на хаотично импулсни смущения, Научни известия на НТС, Младежка научна сесия’ 2000,
стр. 238 - 243.
17. Garvanov, I. and Chr. Kabakchiev - Sensitivity of API CFAR Detectors Towards
Change of Input Parameters of Pulse Jamming, Proc. of the International Radar Symposium –
IRS 2004, Warszawa, Poland, 2004, pp. 233 - 238.




























