Embed Size (px)
Citation preview
www.elsevier.com/locate/jag
International Journal of Applied Earth Observation
and Geoinformation 6 (2004) 47–61
An efficient image segmentation algorithm
for landscape analysis
B.J. Devereuxa,*, G.S. Amablea, C. Costa Posadab
aUnit for Landscape Modelling, University of Cambridge, Mond Building, Free School Lane, Cambridge CB2 3RF, UKbDirector de Polıtica Ambiental, Departamento Nacional de Planeacion, Calle 26 No 13-19, Bogota, Colombia
Received 13 November 2003; accepted 7 July 2004
Abstract
Widespread development and use of object-based GIS in the environmental sciences has stimulated a rapid growth in demand
for parcel-based land cover data. Despite the fact that image segmentation techniques applied to remotely sensed data offer the
most effective and direct approach to generating such data their use is still restricted to specialist applications. This paper
describes a general purpose segmentation algorithm capable of creating parcel boundaries from a wide range of image types. A
brief review of image segmentation in a range of disciplines identifies key elements of a successful segmentation algorithm. The
structure and implementation of the algorithm is then described and its performance is illustrated using Landsat ETM imagery of
Eastern England. Comparison of the segmentation product generated by the algorithm with those generated by independent
human analysts demonstrates that the computer algorithm and the manually derived products have just less than eighty percent
correspondence. Most of the differences stem from the more detailed results achieved by the segmentation algorithm.
# 2004 Elsevier B.V. All rights reserved.
Keywords: Region growing; Image segmentation; Land cover; Edge detection; Cover parcels; Mixture modelling
1. Overview and objectives
The last decade has seen major progress in our
ability to extract land cover information from
remotely sensed data whether from space- or airborne
platforms. A vast number of classification algorithms
have been described in the literature and classification
products are widely used in a range of environmental
planning activities. With increasing use of Geogra-
* Corresponding author. Fax: +44 1223 763300.
E-mail address: [email protected] (B.J. Devereux).
0303-2434/$ – see front matter # 2004 Elsevier B.V. All rights reserved
doi:10.1016/j.jag.2004.07.007
phical Information Systems for land use applications
the demand for parcel-based land cover data has
grown rapidly. Furthermore, in the search for more
accurate classifiers there has been a growing recogni-
tion that so called ‘per pixel’ classifiers have inherent
limitations and a parcel-based approach can often lead
to more accurate classification. This growing demand
for parcel-based land cover data has been further
strengthened by developments in landscape ecology
which have revealed that an understanding of land-
scape structure as embodied in patchworks of land
cover polygons is fundamental in understanding many
.

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6148
ecosystems. The population performance and
dynamics of numerous animal species have been
related to land parcel or ‘patch’ properties such as
area, size, configuration and connectivity.
The need to acquire land cover parcel outlines for
large areas is thus fundamental to a wide range of
remote sensing applications both in the world of
environmental research and also in the context of
applied work such as mapping and environmental
planning. One method for extracting such data from
remotely sensed imagery is image segmentation.
Segmentation is the process of partitioning a digital
image into a set of discrete, non-overlapping regions on
the basis of internal homogeneity criteria. These may
be defined in terms of a simple measure such as image
contrast or may be the result of complex statistical
analysis. Either way, it is now well known that when
such regions have been extracted from satellite images
and aerial photographs, they form an excellent starting
point for subsequent geospatial analyses such as land
cover classification, mapping of landscape structure
and modelling of terrain attributes. Not unsurprisingly,
geoscientists have thus devoted considerable energy to
devising effective computational procedures for sol-
ving the image segmentation problem.
Given the range of applications for image
segmentation it is perhaps surprising that their use
as a basis for both land cover classification and
landscape ecological analyses has been relatively
limited. This is in part because the benefits of
segmentation procedures in these fields are only just
beginning to receive widespread recognition. Further-
more, software for image segmentation is not widely
available and many published algorithms are tailored
for specific rather than general applications. This
paper will describe a general purpose image segmen-
tation algorithm which has a proven track record for
delineation of land cover parcels and which can be
used in both landscape modelling and subsequent per-
parcel classification schemes.
A notable feature of the algorithm is its relative
simplicity. Many existing segmentors make substantial
demands on computing resources. Processing of even
small images (256 � 256 pixels) can require either
very large computers or substantial processing time or,
on some occasions, both. The algorithm described here
was designed and built for intensive use in applications
work. An important design criterion was thus the
ability to process full satellite image scenes (typically
6000 � 6000 pixels) on a PC workstation. As a
consequence, the temptation to include refinements
that might lead to a small improvement in performance
at the cost of substantial increase in processing time has
been resisted. The algorithm has been implemented in
the C programming language under the MS Visual
Studio C compiler. A Unix version is also available.
Typical execution times for a Landsat scene are less
than 30 minutes.
The remainder of this paper will present a brief
overview of image segmentation methods with
reference to their application in the geosciences. It
will then provide a description of the segmentation
algorithm followed by an example of how it can be
used for analysis of landscape structure. The example
involves segmenting an area of Eastern England
characterised by cover types ranging in complexity
from large scale patterns of arable farmland through
areas of semi-natural grassland and marsh to complex
urban and suburban areas. The paper will conclude
with an evaluation of segmentation performance.
2. Image segmentation methods and applications
In the last 20 years image segmentation has become
the focus of attention for a wide variety of disciplines
sharing a common need to extract useful information
from raster images. Early impetus for segmentation
research stemmed from the field of computer vision
with efforts to simulate the human brain’s ability to
understand photographs. This work was based on the
premise that the human mind interprets an image by
recognising distinct regions. Initially, the broad image
regions are recognised with subsequent focussing to
assimilate more and more detail (Marr, 1982). This
basic idea has persisted and forms the basis for
hierarchical approaches to image segmentation where
filtered and sub-sampled versions of the digital image
are arranged in a hierarchical data structure and
objects are extracted at increasing levels of detail from
successively lower levels of the tree.
With the rapid, widespread growth in availability of
raster scanning devices these basic ideas are now
being explored and applied in an enormous variety of
applications. Nunez and Llacer (2003) for example,
illustrate how segmentation of astronomical images

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 49
using self-organizing neural networks can be used for
identification of stars. Li et al. (2003) show how
invariant features can be extracted from palm print
images for consistent alignment and identification.
Medical applications are extensive. Soltanian-Zadeh
et al. (2003) have used a clustering-based method to
identify stroke induced tissue damage in rats from
MRI images and Taur (2003) presents a segmentation
methodology for monitoring the extent of psoriasis
based on feature extraction and fuzzy data analysis. In
engineering Kim et al. (2003) describe a method for
analysing the shape and size of aggregate particles in
digital camera and laser profile data.
Applications in the geosciences revolve around two
principal requirements. Firstly, the vast quantities of
image data generated by earth orbiting satellites are
only of value for environmental analysis if they can be
converted to meaningful data via classification.
Secondly, the rapid growth and analytical power of
GIS systems have fuelled an enormous demand for
object-based information (Geneletti and Gorte, 2003).
By far the cheapest and richest source of such data is
segmentation and classification of remotely sensed
images derived from satellites or aircraft. Whilst
examples abound in meteorology, oceanography,
geology, cartography and the biosciences it is in the
area of land cover and landscape analysis that most
applications can be found.
Wicks et al. (2002) have highlighted the need for
accurate delineation of vegetation parcels to ensure
accurate evaluation of carbon sinks in studies of global
change. Numerous studies have focussed on the
segmentation of field patterns for use in crop inventory
and monitoring (See Benie and Thomson, 1992;
Meyer, 1992). Forestry applications aimed at measur-
ing stand canopy properties, biomass and health have
received extensive attention (Woodcock and Harward,
1992; Pekkarinen, 2002) as have efforts to map and
extract biophysical properties from tropical rain-
forests. Hill (1999) for example, reports that the use of
segmented Landsat TM imagery resulted in a major
improvement in ability to discriminate between
different forest types over basic per-pixel analysis.
In relation to soil moisture analysis Bosworth et al.
(2003) describe a segment-based approach to mapping
soil moisture using Landsat channels 3, 4 and 6 whilst
van der Sande et al. (2003) use segment-based
classification for evaluating flood risk.
Despite this strong body of evidence that image
segmentation can play a key role in object-based,
geospatial analysis the use of image segmentation
is rather less widespread than one might expect
(Lobo et al., 1996). Few of the leading image
analysis systems in remote sensing offer high quality
segmentation modules for use in classification
although demand from landscape ecologists is
contributing to the success of new products such
as ‘Ecognition’ which offer a sophisticated, seg-
ment-based approach to classification (Ecognition,
2002). One reason for this may be lack of awareness
of the benefits segment-based analysis can bring
coupled with a shortage of available software
implementations. An additional, more subtle pro-
blem perhaps relates to the diversity of applications
itself. Many of the studies referred to above relate to
very specific applications areas and as a conse-
quence, many published procedures in the geos-
ciences are tailored for specific needs.
One of the guiding principles in the work described
here has been to design a segmentor with the widest
possible range of applications in the environmental
sciences. Inevitably, this introduces the risk of less
than optimum performance in any specific application
but the present authors follow Woodcock and Harward
(1992) in being convinced of the need for a theory of
image structure for geospatial analysis. Such a theory
must take account of basic issues including resolution,
scale, scene noise and generalisation. It is only by
understanding the relationships between image struc-
ture and scene structure that such a theory will emerge
and this means that segmentation methods which
focus on image structure have a key role to play.
Frequent and comprehensive reviews of image
segmentation techniques (see for example Haralick
and Shapiro, 1985; Pal and Pal, 1993; Freixenet et al.,
2002) abound and these provide the background for
the technique described here.
For the purposes of this discussion it is convenient
to recognise three distinct approaches to image
segmentation which are a combination of the more
detailed, six category typology originally proposed by
Haralick and Shapiro (op. cit.). These are
1. m
easurement space clustering,2. s
plit and merge techniques,3. s
patial linkage procedures.
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6150
Measurement space clustering involves identifica-
tion of clusters in the measurement or feature space of
the image. One of the simplest approaches is to build
an image histogram and search for peaks and valleys.
Peaks are assumed to correspond with distinct objects
and valley low points are assumed to be their separ-
ation points. By selection of one or more appropriate
thresholds the image can be partitioned into homo-
genous objects which can be displayed by mapping
back into the image space. Density slicing is a simple
example of such a technique which reveals the main
weakness of the method for environmental applica-
tions. Most remotely sensed images are extremely
complex and the identification of thresholds which
give clean, well defined objects is almost impossible.
Other, more sophisticated variations on the
approach include statistical clustering methods such
as the ISODATA algorithm that groups pixels into
classes based on some measure of their distance apart
in feature space. Strictly speaking these are classifiers
rather than segmentors. Whilst they are frequently
used in the geosciences to segment images they suffer
from major shortcomings when used in this way. In
particular, failure to use spatial and contextual
information to determine the status of each pixel
tends to result in segmentations which have large
amounts of ‘salt and pepper’ noise and which result in
excessive merging of segments due to computational
constraints limiting the ultimate numbers of clusters
which can be identified.
Split and merge procedures work by treating an
entire image as an ‘existing’ segment. Existing
segments are split into quarters if they fail to meet
some homogeneity criterion based on greyscale
difference or segment variance. Continued splitting
results in a quad tree structure in which the leaves
represent the smallest segments. Such a structure
would clearly result in very square regions and to
avoid this the option of merging adjacent nodes in the
tree is introduced. This can be achieved by comparison
of greyscale intensity distributions using analysis of
variance. Cross et al. (1988) describe an early
implementation of this technique for analysis of
remotely sensed data and highlight its efficiency for
displaying versions of the original image at differing
levels of resolution.
The ability of split and merge approaches to store
multiple renditions of remotely sensed images at
different levels of generalisation has led to interest in
hierarchical segmentation. In these approaches it is
assumed that there is a relationship between object
boundaries at each level of generalisation thus leading
to the idea of nested, hierarchical scene models
proposed by Woodcock and Harward (op.cit.).
Examples of this approach are provided by Bosworth
et al. (2003) who employed a multi-resolution image
pyramid for watershed mapping and Benie and
Thomson (op.cit.) who achieved region merging on
the basis of adaptive similarity rules in their efforts to
segment agricultural landscapes.
By far the largest category of segmentation
methods is the spatial linkage techniques. These treat
each pixel in an image as a node in a graph. Adjacent
pixels which meet some similarity criterion are joined
by an arc and image segments are defined as maximal
sets of pixels belonging to the same connected
component (Haralick and Shapiro, op. cit.). Regions
are grown by systematically scanning the image.
Pixels which meet the similarity criterion are merged
and pixels which do not, form starting or ‘seed’ points
for new segments.
Usually, a simple, grey level difference is used as
the similarity criterion with adjacent pixels being
merged if they are within a greyscale difference
threshold. However, Baraldi and Parmiggiani (1996)
have shown that improved region growing can be
achieved when Landsat TM images are being
segmented by using a quantity called the ‘vector
degree of match’. This is based on a normalised and
adaptive comparison of pixel vectors rather than a
simple difference threshold. The great advantage of
linkage-based methods is their simplicity. However,
their main disadvantage is ‘region leakage’ where
segments leak out into their neighbours. Leakage
problems may arise as a consequence of beginning
new segments with excessively noisy pixels or may be
a consequence of the order in which image pixels are
processed. Either way, they result in serious problems
for subsequent analysis.
Numerous strategies have been devised to try and
circumvent the shortcomings of the simple linkage
approach. So called ‘hybrid linkage region growing’
recognises that it is important to avoid the inclusion of
edge pixels in the early stages of segment growth as
these are inherently noisy and lead to ill-conditioned
segments. Both Le Moigne and Tilton (1995) and
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 51
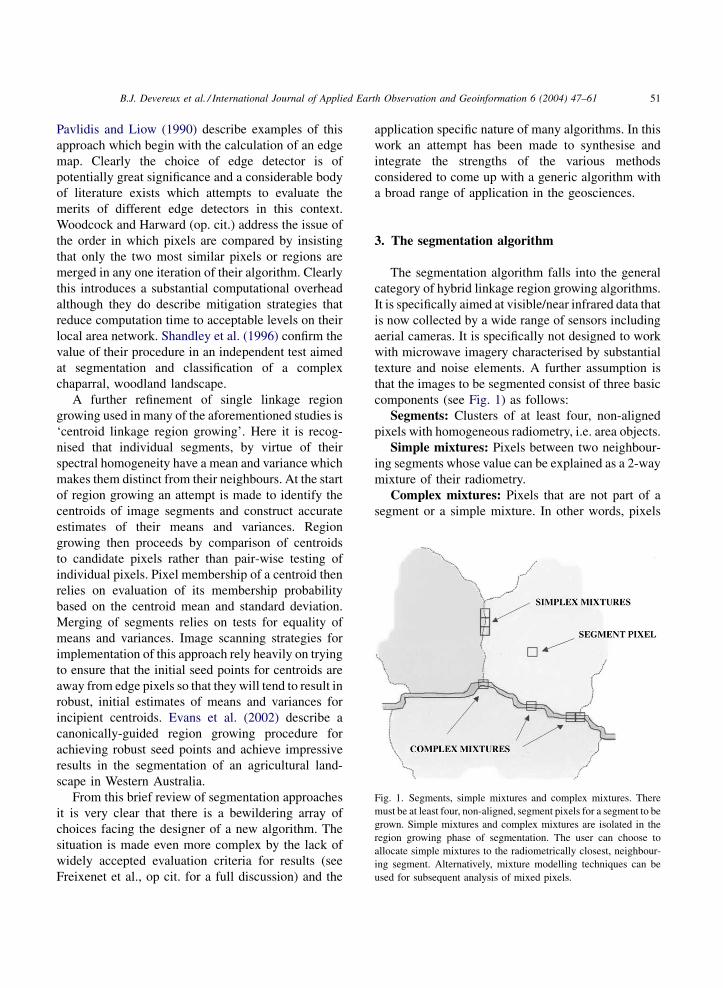
Fig. 1. Segments, simple mixtures and complex mixtures. There
must be at least four, non-aligned, segment pixels for a segment to be
grown. Simple mixtures and complex mixtures are isolated in the
region growing phase of segmentation. The user can choose to
allocate simple mixtures to the radiometrically closest, neighbour-
ing segment. Alternatively, mixture modelling techniques can be
used for subsequent analysis of mixed pixels.
Pavlidis and Liow (1990) describe examples of this
approach which begin with the calculation of an edge
map. Clearly the choice of edge detector is of
potentially great significance and a considerable body
of literature exists which attempts to evaluate the
merits of different edge detectors in this context.
Woodcock and Harward (op. cit.) address the issue of
the order in which pixels are compared by insisting
that only the two most similar pixels or regions are
merged in any one iteration of their algorithm. Clearly
this introduces a substantial computational overhead
although they do describe mitigation strategies that
reduce computation time to acceptable levels on their
local area network. Shandley et al. (1996) confirm the
value of their procedure in an independent test aimed
at segmentation and classification of a complex
chaparral, woodland landscape.
A further refinement of single linkage region
growing used in many of the aforementioned studies is
‘centroid linkage region growing’. Here it is recog-
nised that individual segments, by virtue of their
spectral homogeneity have a mean and variance which
makes them distinct from their neighbours. At the start
of region growing an attempt is made to identify the
centroids of image segments and construct accurate
estimates of their means and variances. Region
growing then proceeds by comparison of centroids
to candidate pixels rather than pair-wise testing of
individual pixels. Pixel membership of a centroid then
relies on evaluation of its membership probability
based on the centroid mean and standard deviation.
Merging of segments relies on tests for equality of
means and variances. Image scanning strategies for
implementation of this approach rely heavily on trying
to ensure that the initial seed points for centroids are
away from edge pixels so that they will tend to result in
robust, initial estimates of means and variances for
incipient centroids. Evans et al. (2002) describe a
canonically-guided region growing procedure for
achieving robust seed points and achieve impressive
results in the segmentation of an agricultural land-
scape in Western Australia.
From this brief review of segmentation approaches
it is very clear that there is a bewildering array of
choices facing the designer of a new algorithm. The
situation is made even more complex by the lack of
widely accepted evaluation criteria for results (see
Freixenet et al., op cit. for a full discussion) and the
application specific nature of many algorithms. In this
work an attempt has been made to synthesise and
integrate the strengths of the various methods
considered to come up with a generic algorithm with
a broad range of application in the geosciences.
3. The segmentation algorithm
The segmentation algorithm falls into the general
category of hybrid linkage region growing algorithms.
It is specifically aimed at visible/near infrared data that
is now collected by a wide range of sensors including
aerial cameras. It is specifically not designed to work
with microwave imagery characterised by substantial
texture and noise elements. A further assumption is
that the images to be segmented consist of three basic
components (see Fig. 1) as follows:
Segments: Clusters of at least four, non-aligned
pixels with homogeneous radiometry, i.e. area objects.
Simple mixtures: Pixels between two neighbour-
ing segments whose value can be explained as a 2-way
mixture of their radiometry.
Complex mixtures: Pixels that are not part of a
segment or a simple mixture. In other words, pixels

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6152
which are distinctive from their neighbours but cannot
be explained by a simple mixture of neighbouring
segments. These are mosaic pixels whose radiometry
is defined by more than two scene objects. They might
represent pixels covering the corner point of three
adjacent fields or a narrow linear feature such as a road
bounded by fields on either side.
This assumption has two important ramifications.
Firstly, it implies that scene objects occupying less
than four, non-aligned pixels cannot be identified by
the procedure as segments. Thus no attempt will be
made to extract scene objects which are too small to be
identified at the resolution of the sensor. Also it
provides a lower limit for specifying any minimum
mappable unit which might be required in subsequent
classification or analysis of the segments. Secondly, it
enables simple and complex mixed pixels to be
isolated in subsequent image analysis and treated
differently to area objects. Whilst many analyses
might simply follow the route of generalisation and
append these pixels to the closest segment, the
possibility of having hybrid classifiers based on both
per-pixel classification and linear mixture modelling is
opened up. It is this latter possibility which makes
segment-based classification so powerful.
Building on this basic assumption about the
structure of images, the segmentor has two key
stages. In the first stage an edge detection procedure is
used to label all pixels which would be unsuitable as
seed points for growing segments. In the second stage,
rectangular ‘seed regions’ are identified such that no
seed region contains an edge pixel. The seed regions
are then ordered in terms of their quality and grown
into segments using a recursive, centroid linkage
algorithm. The main features of the edge detection and
seeding/region growing stages will be described in the
following sub-sections.
3.1. Edge detection
By far the most common approach to generating
edge information for use in segmentation procedures
is the use of a conventional edge detection algorithm
applied to the image to be segmented (Pavlidis and
Liow, 1990). However, remotely sensed imagery
differs from that used in many other disciplines
because survey and cartographic data held in GIS
systems also has the potential to offer a source of edge
data (Janssen and Molenaar, 1995; Wicks et al., 2002).
Unfortunately both of these sources have problems
which result in noisy or incorrect edges and can lead to
difficulty for subsequent use by segmentors. Survey
data problems include poor image to map registration,
lack of temporal match, cartographic generalisation,
differences in scale and incomplete boundaries (e.g.
gates and gaps in hedgerows). Edge detectors suffer
from problems in the selection of appropriate thresh-
olds for splitting edge and non-edge pixels. This issue
can be particularly critical in segmentation algorithms
that use edge data for terminating the growth of
segments (see Le Moigne and Tilton, op. cit.).
Furthermore, there is such a plethora of edge detection
techniques now available, each with slightly differing
properties, that selection of an appropriate method can
also be difficult.
The segmentation algorithm described here has
been designed to work with both external survey data
rasterised into an edge map or with data generated by
any edge detection algorithm which results in a good,
but potentially imperfect structural representation of
the image in question. The main function of the edge
data is to ensure that well-behaved seed points can be
identified for subsequent region growing. Although
the edge data are used at the region growing stage they
are used for collateral checking of segment integrity
rather than as an absolute control over the process.
Taken together, these constraints on the use of edge
information mean that the segmentor is very robust in
the face of inaccurate edge information and a poor
quality edge map will not necessarily result in poor
quality segmentation.
For most applications of the algorithm a very
straightforward edge detector has been found to
produce good results. Fig. 2 shows the stages in the
process which first involves gaussian smoothing of
each image band and extraction of partial derivatives
using a 9 � 9 kernel. Next a quantity approximating
the multispectral slope of the image for each pixel is
computed. For an image Cxy with m bands this is
defined by (1);
lmax ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi@C2
1
@xþ @C2
1
@yþ � � � þ @C2
m
@xþ @C2
m
@y
s(1)
where @C is the change in pixel digital number and
@x,@y are distances in the x and y direction respectively.
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 53
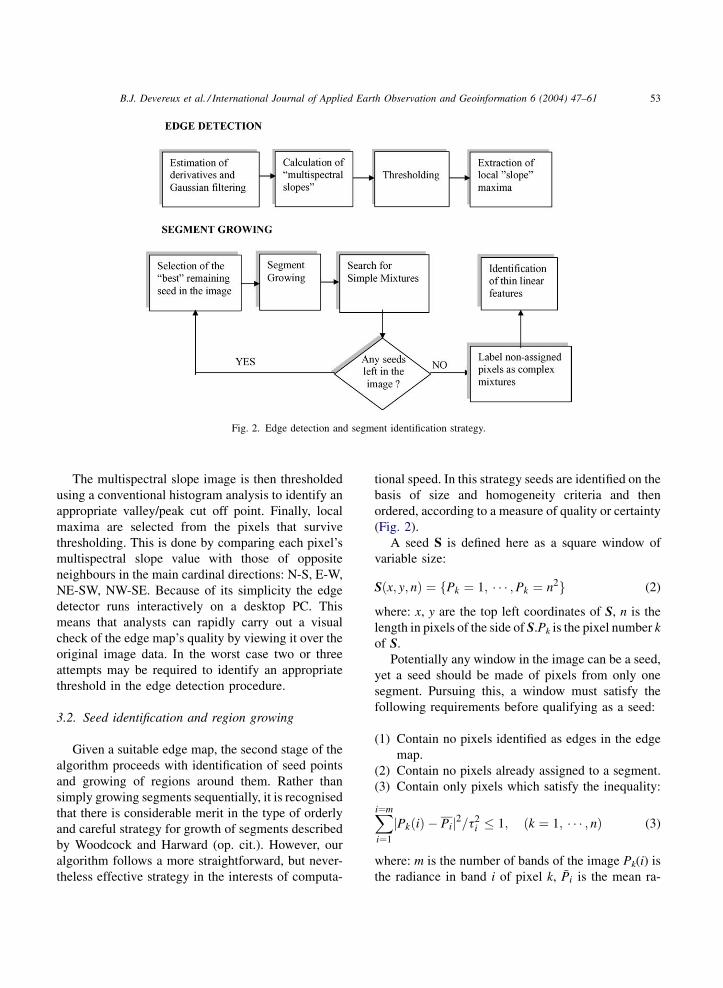
Fig. 2. Edge detection and segment identification strategy.
The multispectral slope image is then thresholded
using a conventional histogram analysis to identify an
appropriate valley/peak cut off point. Finally, local
maxima are selected from the pixels that survive
thresholding. This is done by comparing each pixel’s
multispectral slope value with those of opposite
neighbours in the main cardinal directions: N-S, E-W,
NE-SW, NW-SE. Because of its simplicity the edge
detector runs interactively on a desktop PC. This
means that analysts can rapidly carry out a visual
check of the edge map’s quality by viewing it over the
original image data. In the worst case two or three
attempts may be required to identify an appropriate
threshold in the edge detection procedure.
3.2. Seed identification and region growing
Given a suitable edge map, the second stage of the
algorithm proceeds with identification of seed points
and growing of regions around them. Rather than
simply growing segments sequentially, it is recognised
that there is considerable merit in the type of orderly
and careful strategy for growth of segments described
by Woodcock and Harward (op. cit.). However, our
algorithm follows a more straightforward, but never-
theless effective strategy in the interests of computa-
tional speed. In this strategy seeds are identified on the
basis of size and homogeneity criteria and then
ordered, according to a measure of quality or certainty
(Fig. 2).
A seed S is defined here as a square window of
variable size:
Sðx; y; nÞ ¼ fPk ¼ 1; � � � ;Pk ¼ n2g (2)
where: x, y are the top left coordinates of S, n is the
length in pixels of the side of S.Pk is the pixel number k
of S.
Potentially any window in the image can be a seed,
yet a seed should be made of pixels from only one
segment. Pursuing this, a window must satisfy the
following requirements before qualifying as a seed:
(1) C
ontain no pixels identified as edges in the edgemap.
(2) C
ontain no pixels already assigned to a segment.(3) C
ontain only pixels which satisfy the inequality:Xi¼m
jP ðiÞ Pij2=t2 � 1; ðk ¼ 1; � � � ; nÞ (3)
i¼1k i
where: m is the number of bands of the image Pk(i) is
the radiance in band i of pixel k, Pi is the mean ra-

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6154
diance of S in band I, ti is a threshold specified by the
analyst in one of two ways: As a number of standard
deviations for the seed S in each band or as a constant
value for each band i of the entire image.
By restricting seeds to square blocks free of known
or suspected edge pixels, seeds are pushed away from
edges (even fragmented edges) towards the inside of
segments. When ti is specified as a constant then (3)corresponds to the simple linkage difference situation
and images can be processed which do not have
normally distributed segment radiometry. When ti is
specified in terms of standard deviations from the
seed’s mean, the assumption is implicitly made that
the segment in question is multivariate normal. Seeds
are generated which are tightly concentrated around
their radiometric mean and thus yield a good estimate
of the true segment mean for subsequent region
growing. This reduces the possibility of aberrant
segments being grown as a consequence of inap-
propriate starting pixels for segment growth.
The image is searched for seed points in such a way
that the largest seeds are identified first. A typical
starting size for most VIS/NIR satellite imagery would
be 15 � 15. All seeds of this size are identified and
grown into segments. Successively smaller seeds are
then processed until size 2 � 2 is reached. Because
large seeds give the best estimates of segment means
and standard deviations this search strategy tends to
maximise the reliability of the subsequent region
growing stage. A refinement of the search strategy
involves ordering all seeds of a particular size by their
standard deviation and processing those with the
smallest standard deviation first. Whilst this does
produce a slight improvement in performance the
additional computational costs are substantial and are
difficult to justify when dealing with production
situations where cost is an issue.
Growth of seeds into segments involves checking
neighbouring pixels in all directions. Pixels are added
to the segment if they meet the following require-
ments:
� T
hey are not assigned to another segment. (a) � T hey satisfy inequality (3) above (b) � T hey are not contained in the edge map. (c)This process is performed using a recursive routine
that starts with a pixel in the middle of the seed. If the
pixel meets requirements (a) and (b), it is marked as
part of the growing segment. If it also fulfils requir-
ement (c), its four-connected neighbours (N, S, W, E)
are subsequently checked in order of distance from the
centre of the seed. Due to the four-connected, recu-
rsive approach, errors in the edge map are ignored and
the routine is able to grow around disconnected fea-
tures wrongly identified as edges. These are thus in-
cluded in the segment as long as requirements (a) and
(b) are satisfied. The region growing strategy enables
segments of any shape to be created. As a result of the
seed selection strategy and the recursive growing
routine, segments are grown from the biggest square
seed that can be fitted inside the segment, are not
affected by edge noise, are limited by clear continuous
edges and are radiometrically constrained by inequal-
ity (3).Finally, as each segment S is completed, all of its
perimeter pixels that neighbour a previously created
segment Sp are tested to see if they can be explained as
linear mixtures of S and Sp. Due to atmospheric noise
and the impact of processing methods such as
resampling, simple mixtures in satellite imagery can
be up to two pixels wide. For this reason, neighbouring
segments are allowed to be up to one pixel away from
the pixel being tested. Pixels identified as simple
mixtures are marked accordingly for subsequent
processing and all remaining pixels in the image are
assumed to be complex mixtures. Simple mixtures can
be either allocated to their radiometrically closest
neighbouring segment or could be decomposed using
linear mixture modelling techniques depending on the
application.
4. Performance evaluation: image segmentationand models of landscape structure
The algorithm described in this paper has been used
extensively over the last 5 years by both the authors
and a range of other institutions concerned with land
cover and associated issues (see Murfitt, 1999 for a
review). The types of imagery processed includes
CASI, ATM, LIDAR and aerial photography. Many of
the applications involve use of the segmentor as part
of a wider classification methodology aimed at the
production of parcel-based land cover maps. Fuller
et al. (2002) used our software implementation of
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 55
Fig. 3. The east of England study area.
the algorithm1 in the production of land cover 2000, a
Landsat TM/ETM based land cover map of the United
Kingdom. This work involved segmentation and
classification of some 79 images in a 2 year project.
The parcel-based approach made possible by image
segmentation was a key factor in producing a superior
product to its predecessor, the Land Cover Map of
Great Britain. Smith and Fuller (2001) describe a
similar approach to land cover classification in Jersey
which again underlines the value of the segmentor as
an element in classification methodology.
As these and other studies amply demonstrate the
value of the technique in image classification, this
paper will illustrate the performance of the algorithm
as a basis for extracting models of landscape structure
from Landsat ETM imagery. Recent developments in
landscape ecology have demonstrated very clearly that
the structure of landscapes, as defined by the pattern of
land cover parcels, corridors and matrix background
can have a profound influence on ecosystem function
(Forman, 1997). The result has been a substantial
increase in demand for mapping of land parcel and
corridor boundaries. However, manual recording of
such data from imagery is extremely time consuming
and rarely leads to products which are complete or
have consistent properties in terms of generalisation.
1 This software is distributed with Laserscan’s IGIS product or
can be obtained by contacting the University of Cambridge Unit for
Landscape Modelling.
Use of boundaries derived by raster to vector
conversion of classified images also has significant
problems stemming from classification errors,
unwanted merging of distinct segments which fall
into the same class and large numbers of unwanted
segments caused by erroneous classification of mixed
pixels.
By contrast image segmentation provides a direct
and effective approach to mapping landscape structure
by enabling the delineation of land cover parcels and
subsequently, their associated parameters (size, area,
connectivity, adjacency etc.). Furthermore, the seg-
mentation strategy described here permits effective
implementation of minimum mappable units and a
mechanism for dealing consistently with the problem
of mixed pixels. The aim of the evaluation experiment
was thus to compare the performance of the segmentor
as a basis for mapping landscape structure with
traditional visual interpretation.
The study site selected for the experiment was an
area of Eastern England stretching from the Thames
estuary in the south to the ports of Ipswich, Felixtowe
and Harwich in the north (Fig. 3). The diversity of
landscape types included in the area made it an
excellent example for testing the segmentor. The
dominant land use is one of large scale, arable farming
leading to a mosaic of large, clearly defined fields.
However, in terms of providing a challenge for the
algorithm, most of the remaining land covers are
rather more complex. In the north of the region there is
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6156
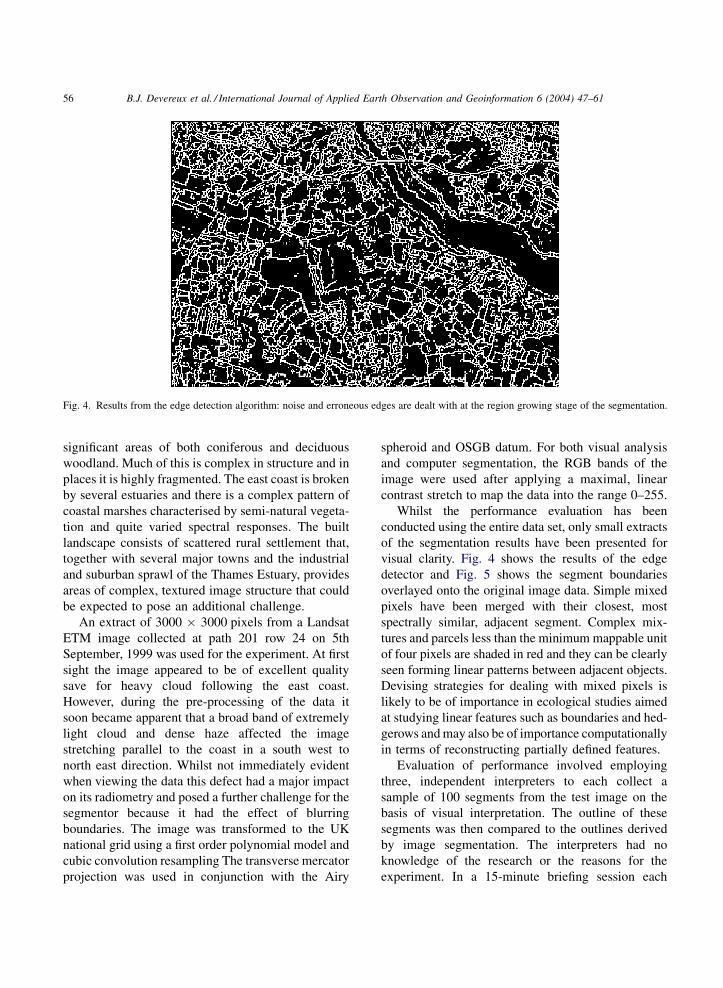
Fig. 4. Results from the edge detection algorithm: noise and erroneous edges are dealt with at the region growing stage of the segmentation.
significant areas of both coniferous and deciduous
woodland. Much of this is complex in structure and in
places it is highly fragmented. The east coast is broken
by several estuaries and there is a complex pattern of
coastal marshes characterised by semi-natural vegeta-
tion and quite varied spectral responses. The built
landscape consists of scattered rural settlement that,
together with several major towns and the industrial
and suburban sprawl of the Thames Estuary, provides
areas of complex, textured image structure that could
be expected to pose an additional challenge.
An extract of 3000 � 3000 pixels from a Landsat
ETM image collected at path 201 row 24 on 5th
September, 1999 was used for the experiment. At first
sight the image appeared to be of excellent quality
save for heavy cloud following the east coast.
However, during the pre-processing of the data it
soon became apparent that a broad band of extremely
light cloud and dense haze affected the image
stretching parallel to the coast in a south west to
north east direction. Whilst not immediately evident
when viewing the data this defect had a major impact
on its radiometry and posed a further challenge for the
segmentor because it had the effect of blurring
boundaries. The image was transformed to the UK
national grid using a first order polynomial model and
cubic convolution resampling The transverse mercator
projection was used in conjunction with the Airy
spheroid and OSGB datum. For both visual analysis
and computer segmentation, the RGB bands of the
image were used after applying a maximal, linear
contrast stretch to map the data into the range 0–255.
Whilst the performance evaluation has been
conducted using the entire data set, only small extracts
of the segmentation results have been presented for
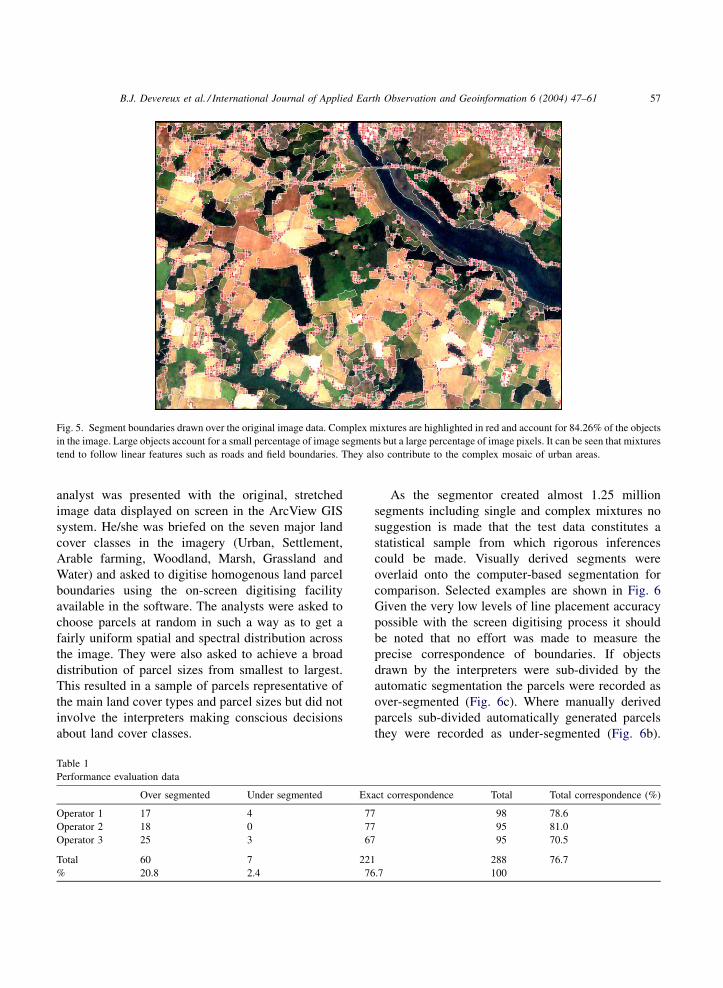
visual clarity. Fig. 4 shows the results of the edge
detector and Fig. 5 shows the segment boundaries
overlayed onto the original image data. Simple mixed
pixels have been merged with their closest, most
spectrally similar, adjacent segment. Complex mix-
tures and parcels less than the minimum mappable unit
of four pixels are shaded in red and they can be clearly
seen forming linear patterns between adjacent objects.
Devising strategies for dealing with mixed pixels is
likely to be of importance in ecological studies aimed
at studying linear features such as boundaries and hed-
gerows and may also be of importance computationally
in terms of reconstructing partially defined features.
Evaluation of performance involved employing
three, independent interpreters to each collect a
sample of 100 segments from the test image on the
basis of visual interpretation. The outline of these
segments was then compared to the outlines derived
by image segmentation. The interpreters had no
knowledge of the research or the reasons for the
experiment. In a 15-minute briefing session each
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 57
Fig. 5. Segment boundaries drawn over the original image data. Complex mixtures are highlighted in red and account for 84.26% of the objects
in the image. Large objects account for a small percentage of image segments but a large percentage of image pixels. It can be seen that mixtures
tend to follow linear features such as roads and field boundaries. They also contribute to the complex mosaic of urban areas.
analyst was presented with the original, stretched
image data displayed on screen in the ArcView GIS
system. He/she was briefed on the seven major land
cover classes in the imagery (Urban, Settlement,
Arable farming, Woodland, Marsh, Grassland and
Water) and asked to digitise homogenous land parcel
boundaries using the on-screen digitising facility
available in the software. The analysts were asked to
choose parcels at random in such a way as to get a
fairly uniform spatial and spectral distribution across
the image. They were also asked to achieve a broad
distribution of parcel sizes from smallest to largest.
This resulted in a sample of parcels representative of
the main land cover types and parcel sizes but did not
involve the interpreters making conscious decisions
about land cover classes.
Table 1
Performance evaluation data
Over segmented Under segmented Ex
Operator 1 17 4 77
Operator 2 18 0 77
Operator 3 25 3 67
Total 60 7 221
% 20.8 2.4 76
As the segmentor created almost 1.25 million
segments including single and complex mixtures no
suggestion is made that the test data constitutes a
statistical sample from which rigorous inferences
could be made. Visually derived segments were
overlaid onto the computer-based segmentation for
comparison. Selected examples are shown in Fig. 6
Given the very low levels of line placement accuracy
possible with the screen digitising process it should
be noted that no effort was made to measure the
precise correspondence of boundaries. If objects
drawn by the interpreters were sub-divided by the
automatic segmentation the parcels were recorded as
over-segmented (Fig. 6c). Where manually derived
parcels sub-divided automatically generated parcels
they were recorded as under-segmented (Fig. 6b).
act correspondence Total Total correspondence (%)
98 78.6
95 81.0
95 70.5
288 76.7
.7 100
B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6158
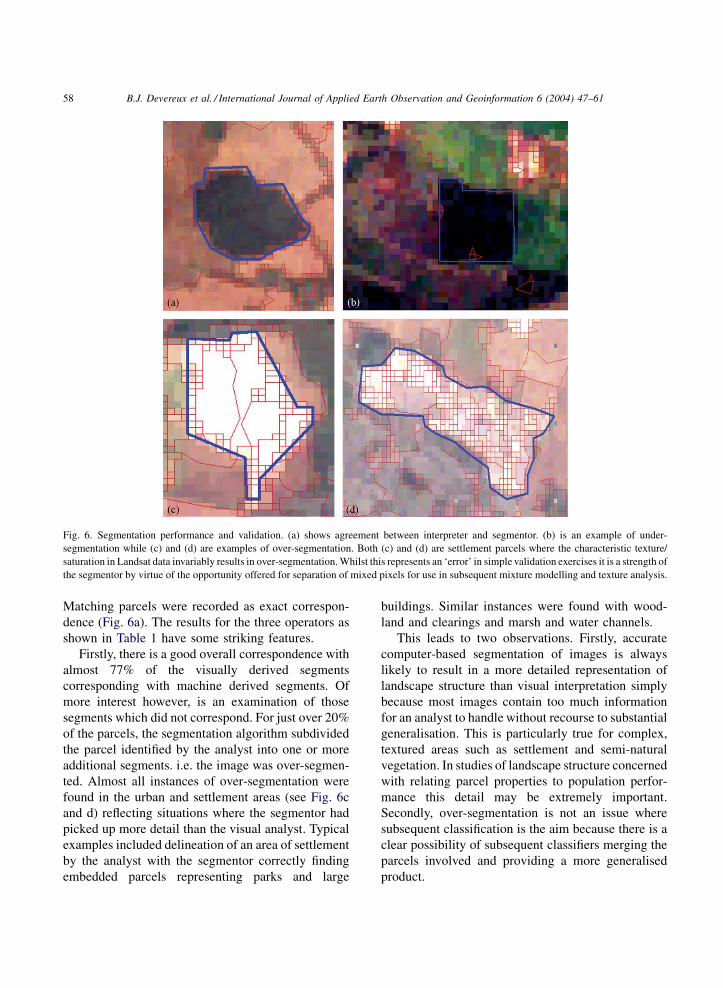
Fig. 6. Segmentation performance and validation. (a) shows agreement between interpreter and segmentor. (b) is an example of under-
segmentation while (c) and (d) are examples of over-segmentation. Both (c) and (d) are settlement parcels where the characteristic texture/
saturation in Landsat data invariably results in over-segmentation. Whilst this represents an ‘error’ in simple validation exercises it is a strength of
the segmentor by virtue of the opportunity offered for separation of mixed pixels for use in subsequent mixture modelling and texture analysis.
Matching parcels were recorded as exact correspon-
dence (Fig. 6a). The results for the three operators as
shown in Table 1 have some striking features.
Firstly, there is a good overall correspondence with
almost 77% of the visually derived segments
corresponding with machine derived segments. Of
more interest however, is an examination of those
segments which did not correspond. For just over 20%
of the parcels, the segmentation algorithm subdivided
the parcel identified by the analyst into one or more
additional segments. i.e. the image was over-segmen-
ted. Almost all instances of over-segmentation were
found in the urban and settlement areas (see Fig. 6c
and d) reflecting situations where the segmentor had
picked up more detail than the visual analyst. Typical
examples included delineation of an area of settlement
by the analyst with the segmentor correctly finding
embedded parcels representing parks and large
buildings. Similar instances were found with wood-
land and clearings and marsh and water channels.
This leads to two observations. Firstly, accurate
computer-based segmentation of images is always
likely to result in a more detailed representation of
landscape structure than visual interpretation simply
because most images contain too much information
for an analyst to handle without recourse to substantial
generalisation. This is particularly true for complex,
textured areas such as settlement and semi-natural
vegetation. In studies of landscape structure concerned
with relating parcel properties to population perfor-
mance this detail may be extremely important.
Secondly, over-segmentation is not an issue where
subsequent classification is the aim because there is a
clear possibility of subsequent classifiers merging the
parcels involved and providing a more generalised
product.

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 59
By contrast, under-segmentation is a greater
analytical problem. Where subsequent classification
is envisaged it is impossible for most widely used
classifiers to split the segments. For landscape
structure analyses the result is a clear error that
would contribute to over-estimation of parcel sizes in
landscape indices. In this examination only 2.4% of
the parcels checked were under-segmented. Most
cases were found to be situations where adjacent
arable fields containing the same crop had been split
by the visual analyst and merged by the segmentor.
Subsequent examination revealed that in these cases a
faint broken boundary could be discerned in the
image. The analyst had extrapolated the boundary
components into a complete feature and correctly
inferred the presence of two distinct fields. Such
extrapolation and inference is currently far beyond our
segmentor and whilst it may be claimed that human
operators cannot cope with the volume of data in even
medium resolution imagery, it is clear that computers
are a long way away from reproducing this type of
interpretation skill.
Clearly there are relatively small differences
between the results for each operator reflecting their
analytical skills, experience in image analysis and
sample composition. However, despite these differ-
ences the results are very consistent and demonstrate
in a simple way the performance of the segmentor.
Overall, it might be concluded that the segmentation
algorithm has done an excellent job at extracting a
model of landscape structure from the imagery in
question despite its defects and challenges. Whilst
there is a correspondence with visual interpretation of
around 77% it is clear that in most cases of over-
segmentation the algorithm is more accurate than the
analysts. It is only in the case of under segmented
parcels where there is a clear difficulty and these
account for less than 3% of the parcels processed
implying a real accuracy in excess of 97%.
5. Conclusions
Image segmentation algorithms can play a key role
in satisfying the demand for parcel based GIS data.
They also provide a mechanism for both improved
image classification systems and building patch,
corridor matrix models of landscapes. An efficient
computational algorithm has been described which
has a proven track record of performing well in all of
these applications areas. The algorithm has been
designed on the basis of a wide ranging review of
published procedures in a variety of disciplines
stretching beyond the environmental sciences. It can
process full satellite image scenes on a PC workstation
from a range of space and airborne sensors with
typical execution times of less than 30 minutes.
The algorithm embodies a two-stage procedure
based on edge detection followed by centroid linkage
region growing. Edges are used to enable the
identification of well- conditioned rectangular regions
that can be used for seeding a centroid linkage region
growing process. By using rectangular regions as
opposed to single pixels to start the growth of
segments, robust estimates of segment means and
standard deviations can be acquired and this enables
reliable, subsequent allocation of pixels to segments
based on membership probabilities. By ordering seeds
for processing in terms of a quality measure based on
size and homogeneity, an orderly pattern of region
growth is achieved in which leakage and other errors
are reduced. Systematic grey level trends within clearly
bounded objects are handled well by this process.
The segmentor assumes that remotely sensed
images can be decomposed into coherent regions
representing scene objects and that these regions are
separated by simple and complex mixed pixels which
form edges and areas of texture. These mixed pixels
lead to problems in most image classification systems
and the ability of the segmentor to isolate them for
differential treatment opens up new possibilities for
classification. Furthermore, its ability to deal with these
image features explicitly in terms of area enables
implementation of standards in the form of minimum
mappable units.
Several major classification studies have employed
the algorithm as part of their methodology and its value
in this context is well documented. This paper has thus
illustrated its value as a tool for mapping landscape
structure. A Landsat image covering an area of Eastern
England was segmented and despite the challenges of
complex land use patterns and cloud/haze affected
data, excellent results were achieved. Comparison of
segmented regions with those identified by three
independent visual interpreters revealed a 77%
correspondence in results. In a further 20% of instances

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–6160
the algorithm produced a more detailed result than the
interpreters and in only 3% of cases did the algorithm
fail to find boundaries in the data which were of
operational significance.
These results demonstrate that computer based
image segmentation can play a key role in mapping of
landscape structure. Results are likely to be both more
consistent and significantly more detailed than those
achieved by visual interpretation. They are also
produced considerably faster and this is exemplified
by the fact that the entire segmentation process was
completed in about half of the time required by each
interpreter to collect the hundred test parcels used for
evaluation. In the very few situations where inference
was needed to arrive at the correct configuration of
boundaries, the analyst’s skills proved superior.
Building this type of inference into segmentation
procedures is perhaps the next major challenge facing
researchers in this field.
Acknowledgements
The contribution of both Leigh Carter and Tim
Mayo to the early development phase of the
segmentation algorithm has been an important
element of this work. More recently, the authors
gratefully acknowledge financial support from the
British National Space Centre provided as part of their
CLEVER mapping project. The patience and con-
structive comments of Geoff Smith and other
members of the Land Cover 2000 team at the NERC
Centre for Ecology and Hydrology is also acknowl-
edged. Thanks are due to colleagues at the ULM who
have helped to compile the evaluation data and others
who have also made key contributions. The efforts of
Tim Cockerell, Robin Fuller and Gill Renshaw are
also gratefully acknowledged. Finally, the authors
would like to thank Arko Lucieer and a second
anonymous referee whose constructive comments
have resulted in notable improvements to the paper.
References
Baraldi, A., Parmiggiani, F., 1996. Single linkage region growing
algorithms based on the vector degree of match. IEE Transact.
Geosci. Remote Sens. 34 (1), 137–147.
Benie, G., Thomson, K., 1992. Hierarchical image segmentation
using local and adaptive similarity rules. Int. J. Remote Sens. 13
(8), 1559–1570.
Bosworth, J., Koshimizu, T., Acton, S., 2003. Multi-resolution
segmentation of soil moisture imagery by watershed pyramids
with region merging. Int. J. Remote Sens. 24 (4), 741–
760.
Cross, A., Mason, D., Dury, S., 1988. Segmentation of remotely
sensed images by a split-and-merge process. Int. J. Remote Sens.
9, 1329–1345.
ECognition (2002). User Guide, Definiens Imaging GmbH, Munich,
p. 65. Available via http://www.definiens-imaging.com/pro-
duct.htm.
Evans, C., Jones, R., Svalbe, I., Berman, M., 2002. Segmenting
multispectral Landsat TM images into field units. IEEE Trans-
act. Geosci. Remote Sens. 40 (5), 1054–1064.
Forman, R.T., 1997. Land Mosaics. Cambridge University Press,
Cambridge.
Freixenet, J., Munoz, X., Raba, D., Marti, J., Cufi, X., 2002.
Yet another survey on image segmentation: Region and bound-
ary information integration. In: Heyden, A., et al. (Eds.), ECCV
Lecture Notes in Computer Science, vol. 2352. pp. 408–422.
Fuller, R., Smith, G., Sanderson, J., Hill, R., Thompson, A., 2002.
The UK land cover map 2000: construction of a parcel-based
vector map from satellite images. Cartogr. J. 39 (1), 15–25.
Geneletti, D., Gorte, B., 2003. A method for object-oriented land
cover classification combining Landsat TM data and aerial
photographs. Int. J. Remote Sens. 24 (6), 1273–1286.
Haralick, R., Shapiro, L., 1985. Image segmentation techniques.
Comput. Vis., Graph. Image Process. 29, 100–132.
Hill, R.A., 1999. Image segmentation for humid tropical forest
classification in Landsat TM data. Int. J. Remote Sens. 20
(5), 1039–1044.
Janssen, L., Molenaar, M., 1995. Terrain objects, their dynamics and
their monitoring by the integration of GIS and remote sensing.
IEEE Transact. Geosci. Remote Sens. 33 (3), 749–759.
Kim, H., Haas, C., Rauch, A., Browne, C., 2003. 3d image seg-
mentation of aggregates from laser profiling. Comput. Aid. Civil
Infrastruct. Eng. 18 (4), 254–263.
Le Moigne, J., Tilton, C., 1995. Refining image segmentation by
integration of edge and region data. IEEE Transact. Geosci.
Remote Sens. 33 (3), 605–615.
Li, W.X., Zhang, D., Xu, Z., 2003. Image alignment based on
invariant features for palmprint identification. Signal pro-
cess.–image commun. 18 (5), 373–379.
Lobo, A., Chic, O., Casterad, A., 1996. Classification of Mediter-
ranean crops with multisensor data: per-pixel versus per-object
statistics and image segmentation. Int. J. Remote Sens. 17 (12),
2385–2400.
Marr, D., 1982. Vision, Freeman, San Francisco.
Meyer, P., 1992. Segmentation and symbolic description for a
classification of agricultural areas with multispectral scanner
data. IEEE Transact. Geosci. Remote Sens. 30 (4), 673–
679.
Murfitt, P., 1999. Imagery in mapping. In: Nieuwenhuis, G.,
Vaughan, R., Molenaar, M. (Eds.), Operational Remote Sensing
for Sustainable Development. Balkema, pp. 363–366.

B.J. Devereux et al. / International Journal of Applied Earth Observation and Geoinformation 6 (2004) 47–61 61
Nunez, J., Llacer, J., 2003. Astronomical image segmentation by
self-organizing neural networks and wavelets. Neural Netw. 16
(3–4), 411–417.
Pal, R., Pal, K., 1993. A review on image segmentation techniques.
Pattern Recognit. 26 (9), 1277–1294.
Pavlidis, T., Liow, Y., 1990. Integrating region growing and edge
detection. IEEE Transact. Pattern Anal. Machine Intell. 12 (3),
225–233.
Pekkarinen, A., 2002. A method for the segmentation of very high
spatial resolution images of forested landscapes. Int. J. Remote
Sens. 23 (14), 2817–2836.
Shandley, J., Franklin, J., White, T., 1996. Testing the Woodcock–
Harward image segmentation algorithm in an area of southern
California chaparral and woodland vegetation. Int. J. Remote
Sens. 17 (5), 983–1004.
Smith, G., Fuller, R., 2001. An integrated approach to land cover
classification: an example in the Island of Jersey. Int. J. Remote
Sens. 22 (16), 3123–3142.
Soltanian-Zadeh, H., Pasnoor, M., Hammoud, R., Jacobs, M., Patel,
S., Mitsias, P., Knight, R., Zheng, Z., Lu, M., Chopp, M., 2003.
MRI tissue characterization of experimental cerebral ischemia in
rat. J. Magn. Reson. Imaging 17 (4), 398–409.
Taur, J., 2003. Neuro-fuzzy approach to the segmentation of psor-
iasis images. J. VLSI Signal process. Syst. Signal Image Video
Technol. 35 (1), 19–27.
van der Sande, C.J., De Jong, S.M., De Roo, A.P.J., 2003. A
segmentation and classification approach of IKONOS-2 imagery
for land cover mapping to assist flood risk and flood damage
assessment. Int. J. Appl. Earth Observat. Geoinformat. 4 (3),
217–229.
Wicks, T., Smith, G., Curran, P., 2002. Polygon-based aggregation
of remotely-sensed data for regional ecological analyses. Int. J.
Appl. Earth Observat. Geoinformat. 4, 161–173.
Woodcock, C., Harward, V., 1992. Nested-hierarchical scene models
and image segmentation. Int. J. Remote Sens. 13 (16), 3167–
3187.




























