Embed Size (px)
Citation preview

High order fractional complex
central moment for UXV swarm
trajectory controls
Presenter: Jun Steed HuangPrincipal Investigator:Yuhui Shi
Nanshan Zhiyuan Computer and Internet Technology Production and Research base
May 25, 2017

The Team Members• Yuhui Shi is a Chair Professor.
• Jun Steed Huang is a Research Fellow.
• Chang Shao is a Research Associate Math.
• Qiqi Duan is a Research Associate SW.
• Lijun Sun is a Research Associate FW.
• Fan Yang is a Research Associate HW.
• 张胡梦圆, Research Assistant EE.
• 周朦, Research Assistant CS.
• 吴书琴, Research Assistant CS.
• 许梦婷, Research Assistant Math.
• 马策, Research Assistant CS.
• 李汉青, Research Assistant CS.
• 梁轩铨, Research Assistant Phy.
• 周雪凝, Research Assistant Bio.
• 倪犀子, Research Assistant CS.
• 张孜晟, Research Assistant Chem.

Yuhui Shi, Chair Professor, IEEE Fellow, BSO, PSO, evolutionary computation,
swarm intelligence, machine learning, data science.
Jun Steed Huang, Research Fellow, Ottawa Carleton Adj Prof, Canadian Academy
of Sciences Chemical Biological Electromagnetic Nuclear Radiation Water Land and
Space Soft Landing Emergency Countermeasure Plan.
研究助理 研究方向邵昶 数论多目标优化算法段琦琦 大规模高性能分布式优化与学习算法孙立君 群体智能优化以及感知通信的实现与应用扬帆 机械电子硬件的设计张胡梦圆 电子工程许梦婷 数学梁轩铨 物理周雪凝 生物张孜晟 化学周朦,吴书琴 计算机科学马策,李汉青,倪犀子
GPU仿真技术
About the Team

Basic Guiding Ideology
• We do the robot algorithm for the swarm robots is not to let the workers unemployed.
• But in order to avoid unnecessary casualties, the dangerous, embarrassing work left to the swarm robots to do.
• Wool (group algorithm) out of the dog (business community) who let the pig (large users) to pay is today's business model.

Research Status of Cooperative Robot
• In 2009, the Swiss Federal Institute of Technology, Lausanne, made an e-puck system with eight infrared sensors, a VGA color camera and eight LEDs for a bit expensive.
• In 2014 the United States the Massachusetts Institute of Technology did a Kilobot, there is an infrared sensor, an LED, the cost down a lot, but can only form a no hole connected pattern.
• 2016 France Aviz University and made a small apes system Zooids, had a touch sensor, a 2.4G radio, but only in the plane movement.
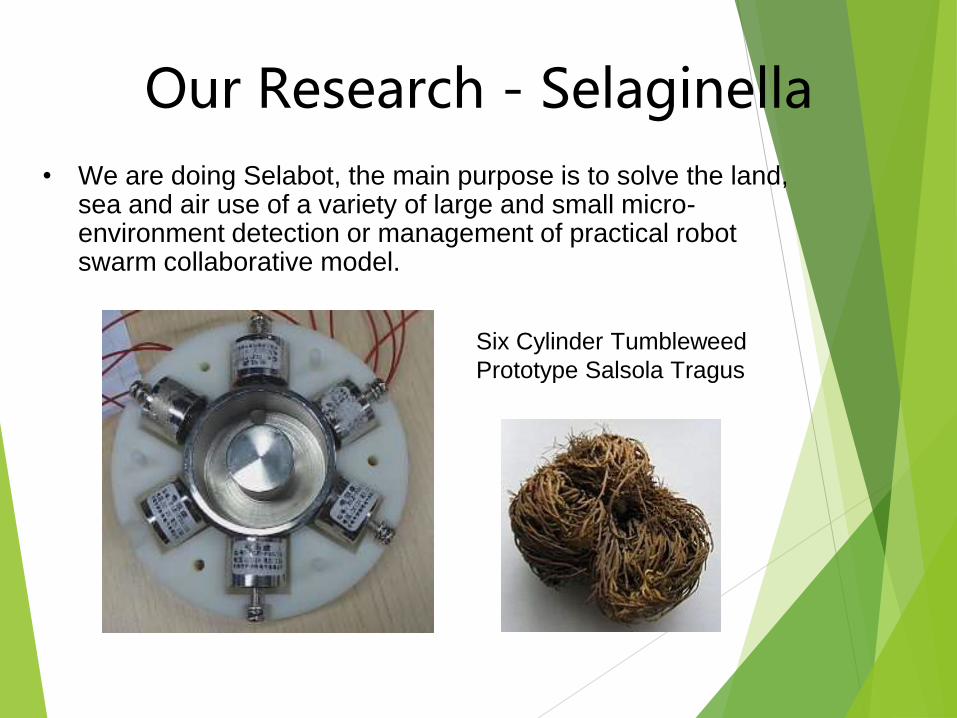
Our Research - Selaginella
• We are doing Selabot, the main purpose is to solve the land, sea and air use of a variety of large and small micro-environment detection or management of practical robot swarm collaborative model.
Six Cylinder Tumbleweed
Prototype Salsola Tragus

The problem to Solve
• Synergy of Motion Trajectory of Multi-sensor UXV swarm based on Particle Swarm Optimization.
• Unmanned various transport Vehicles (UXV) sometimes need to work together, this time need a unified real-time algorithm, otherwise the action between them will be inconsistent.
• Gaussian distribution and variance are relatively stable, but lack of dynamic real-time information, only the high-order complex fractional central moments calculated by time window contain more dynamic directionality

PSO(Sky)The geese consume the least amount of energy
to find their food at the fastest speed

PSO(Sea)
Sardines are arranged in large whale shapes to scare off sharks
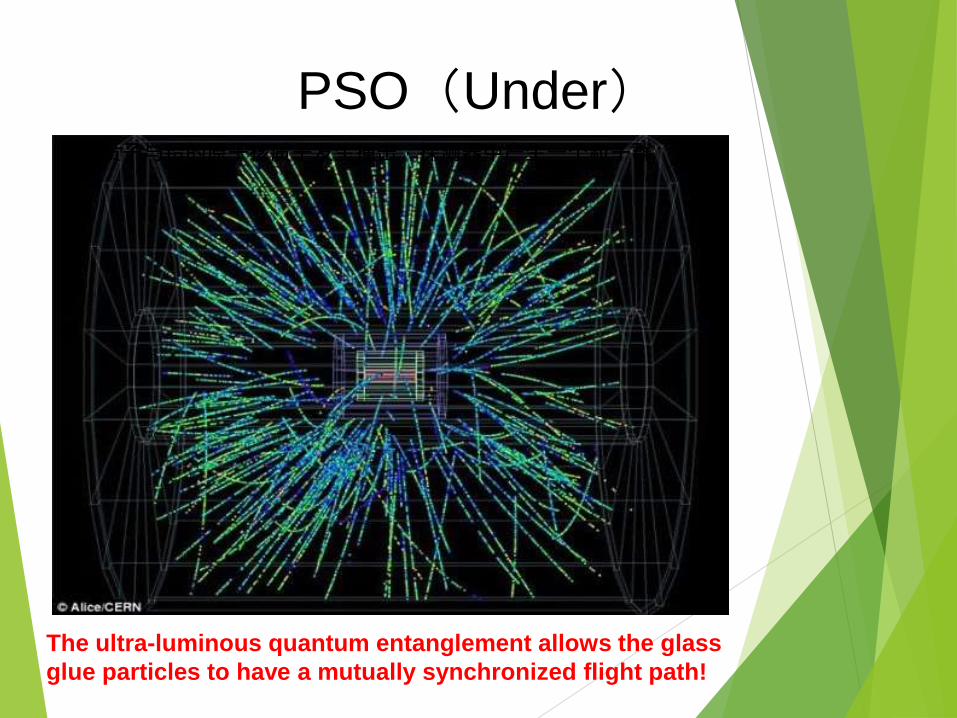
PSO(Under)
大雁耗掉最少能量最快速度找到食物
一个质子与铅的原子核质子发生撞击,探测器中产生一个粒子群
The ultra-luminous quantum entanglement allows the glass
glue particles to have a mutually synchronized flight path!

The PSO Algorithm

Unmanned Aerial Vehicle

Unmanned Underwater Vehicle

Unmanned Ground Vehicle

Unmanned Emergency Vehicle

Unmanned Survey Vehicles

Extending Gaussian Var

Why Fractional Var?
-1
-1
-1
+1
+1
+1
-42 angle-18 angle
When the plane flies alone swing the left side and the right side does not matter,
but when they fly together the coordination is needed!
Euclidean - Newton Space Measure
Riemann Lobachevsky space metric

Defining Fractional Norm
• Fractional Norm:

Defining Fractional Moment
• Fractional center moment:
Given as a discrete random variable, exist, define order k center moment as
where ()is the Gamma function

Application of UXV Swarm
1. Robot energy recovery High-capacity battery pack for fast charger
2. Fast large-scale machine crowd wireless charging device
3. A method of robot movement using three-axis magnetic force for
electromagnetic rotation
4. The use of three-axis magnetic overlap UAV and communication methods
5. The use of electromagnetic resonance induction of the conjoined machine
fish and synergistic methods
6. Brainstorming variance algorithm in coal mine lifesaving robot escape
positioning usage
7. Unmanned aircraft suspension touch controller system and method
8. The use of electromagnetic induction sterilization robot population and
control methods
9. multi-wisdom elderly care machine robot group
10. The use of light perception of heavy metal detection robot population
and control devices

Rolling coal mine rescue
bunkers’coordination

Artificial rainfall haze clean unmanned aerial
vehicles’coordination

Maritime search and rescue unmanned
fishes
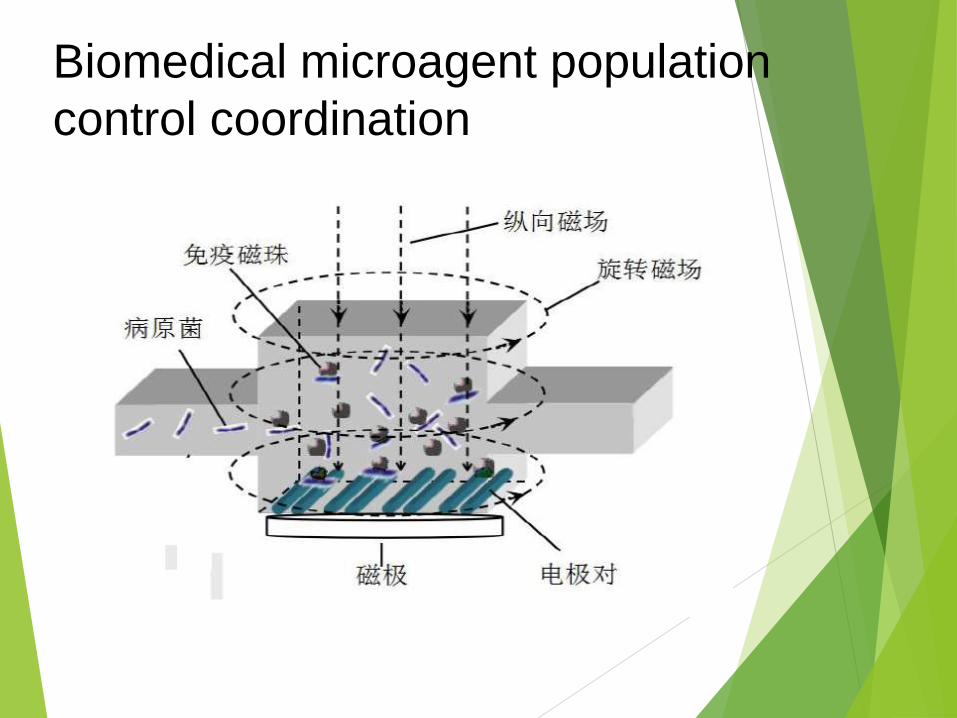
Biomedical microagent population
control coordination

Conclusion
• We have defined Complex Center Moment and related trajectory control.
• The method is dedicated to the coordination of swarm robots.


![%UXV QD SORÿD · %uxv qd sorÿd 5( &$ 0,& euxv qd sorÿd 9lvrn xÿlqdn eh] nrp sur pl vd =d vnlgdq mh ph wdod %h] jyråÿd vxp sr ud l korud =dk whyd pd ol sulwlvdn](https://img.dokumen.tips/doc/110x75/5e5f09d77623513f6d594069/uxv-qd-sord-uxv-qd-sord-5-0-euxv-qd-sord-9lvrn-xlqdn-eh.jpg)