Embed Size (px)
Citation preview

AUTOMATIZACION
Filosofía de los sistemas de control y su arquitectura
Diseño de sistemas de automatización industrial
Métodos de programación Interfase con el operador Intercambio de información con otros
sistemas Selección de equipo y programas
2

AUTOMATIZACION
Realizar una actividad o proceso sin la necesidad de una supervisión directa
3

AUTOMATIZACION
Formar equipos y apuntar las ventajas de automatizar un proceso
Discutir las ventajas planteadas
Ahora hacer una lista con las desventajas
Enlistar lo que podría hacer que no funcione la automatización realizada
4

AUTOMATIZACION
Reducir la variabilidad de un proceso.
Mejorar la productividad.
Mejorar la calidad.
Reducir los desperdicios.
Evitar riesgos a operadores.
Mejorar la seguridad del personal, instalaciones y vecinos.
5

AUTOMATIZACION
Controlador. Contiene el algoritmo de control, se encarga de manejar la salida de control para obtener el valor deseado.
Entrada. Medición de la variables de proceso que se quiere controlar, ésta señal proviene del sensor instalado.
Salida. Señal que actúa sobre el elemento final de control.
Set Point. Valor en que se desea mantener a la variable de proceso.
6

AUTOMATIZACION
La salida de control solo puede estar encendida o apagada: ◦ ON-OFF
La salida de control puede ser modulada en valores desde 0 a 100% ◦ PID
7
AUTOMATIZACION
Formar equipos y escribir la filosofía de control del sistema descrito
Definir las entradas y salidas del sistema
¿Cuáles serían las perturbaciones que podrían afectar la operación del sistema?
8

AUTOMATIZACION
Controles unilazo (una sola variable de control).
Controladores Lógicos Programables (PLC).
Sistemas de Control Distribuido.
9

AUTOMATIZACION
Sistemas que controlan una sóla variable
Cuentan con pantalla para observar los parámetros de operación
Algunos cuentan con pantalla gráfica
Cuentan con salidas de alarmas
10
AUTOMATIZACION
Aplicables a diversos procesos
Reprogramables
Manejo eficiente de señales On/Off
Aplicaciones pequeñas hasta grandes
Modulares
11

AUTOMATIZACION
Utilizados principalmente en procesos contínuos
Altamente confiables
Manejo eficiente de señales analógicas
Costosos, para aplicaciones grandes a muy grandes
Modulares
12
AUTOMATIZACION
Lazo abierto ◦ El parámetro que se controla no se mide por el
sistema de control.
Lazo cerrado ◦ El parámetro que se controla se mide y
retroalimenta al sistema de control.
13

AUTOMATIZACION
¿Qué parámetro (variable de proceso) se quiere controlar?
¿Se puede medir directa o indirectamente la variable de proceso?
¿Cómo se puede controlar la variable de proceso? ◦ Dosificar ◦ Agitar ◦ Calentar ◦ Enfriar ◦ Posicionar
14

AUTOMATIZACION
¿Se quiere controlar dentro de un rango o en un valor específico?
¿Se requiere observar el valor de la variable de proceso?
¿Qué tipo de sensor es adecuado para la aplicación específica?, ¿Se encuentra dentro de nuestro presupuesto?
¿Qué tipo de actuador es adecuado para la aplicación específica?, ¿Se encuentra dentro de nuestro presupuesto?
15

AUTOMATIZACION
¿Se instalará como un control local o cómo parte de un sistema de control de planta?
16

AUTOMATIZACION
Cuál sería el mejor método para solucionar el sistema que esta planteando su equipo y porqué
17

AUTOMATIZACION
La corriente fluye por un cable para llevar la electricidad
Se representa por una “I”
La unidad de medida es el Amper (A ó Amp)
En electrónica se utilizan normalmente miliamperes (mA). ◦ 1 A = 1000 mA
◦ 0.1 A = 100 mA
18
AUTOMATIZACION
El voltaje es el nivel de potencial en un punto específico
El voltaje se mide en Volts (V) Si un punto tiene 5V y otro 0V y se conecta
un cable entre ellos, entonces la corriente fluirá desde el punto en 5V hacia el punto en 0V
0V se conoce como Tierra (Ground)
19

AUTOMATIZACION
El voltaje se transmite de dos formas: ◦ Corriente Directa (CD)
◦ Corriente Alterna (CA)
En la CD el voltaje se mantiene siempre constante
En la CA el voltaje varía en forma senoidal cruzando por cero y la frecuencia de la onda se mide en Hertz (Hz)
20

AUTOMATIZACION
La tierra es GND Tierra es donde no hay diferencia de
potencial con 0V Todos los dispositivos deben compartir la
misma tierra Aunque se utilizan fuentes de diferentes
voltajes todas deben compartir la misma tierra
Cuando se utilizan baterías (CD), el negativo es la tierra
21

AUTOMATIZACION
Es la cantidad de resistencia que encuentra la electricidad
La unidad de medida es el Ohm (Ω)
Se utiliza la nomenclatura de K (kilo-1,000), M (Mega-1,000,000)
4700 Ω = 4.7 KΩ
22

Cuando un circuito se encuentra abierto no puede fluir a través de él la energía eléctrica y no sucede nada
23

Un circuito cerrado permite el flujo eléctrico entre los elementos
La corriente circula y el foco se enciende
24

Cuando dos o más elementos se unen sin derivación entre ellos
En el ejemplo hay tres luces en serie conectados a la batería
25

Cuando dos o más elementos se unen con la misma polaridad
En el ejemplo hay tres luces en paralelo conectados a la batería
26

AUTOMATIZACION
La ley de Ohm describe la relación que existe entre corriente, voltaje y resistencia
V = I R
Resolviendo para I y R obtenemos:
I = V / R R = V / I
27

Fuente de 12 VCD
LED
Corriente 200mA
El voltaje de alimentación es de 12 VCD
La corriente que fluye por el led es de 200mA
Encontrar la resistencia utilizando la fórmula
R = V / I
R = 12 / 0.2
R = 60 Ω
28

AUTOMATIZACION
La potencia es la cantidad de energía que se utiliza para operar un equipo
La potencia se mide en Watts y se representa por con la letra W ó P
P = V I ó P = I2 R
Despejando para V y para I
V = P / I I = P / V
29
Fuente de 12 VCD
LED
Corriente 200mA
El voltaje de alimentación es de 12 VCD
La corriente que fluye por el led es de 200mA
Encontrar la potencia utilizando la fórmula
P = V I
P = 12 * 0.2
P = 2.4 W
30

Foco
100 Watts
120 VCA
El voltaje de alimentación es de 120 VCA
La potencia del foco es de 100 Watts
Encontrar la corriente utilizando la fórmula
I = P / V
I = 100 / 120
I = 0.83 A
31

Las entradas son las señales que llegan al PLC provenientes de sensores
Las salidas son señales que salen del PLC y van hacia un actuador
PLC
Entrada Digital
Salida Digital
32

AUTOMATIZACION
Selectores
Botones
Interruptores de límite
Interruptores de proximidad
Contacto auxiliar de motor (estado)
Relevadores
Encoders
33

AUTOMATIZACION
Transductores de temperatura
Transductores de presión
Celdas de carga
Transductores de humedad
Transductores de flujo
Potenciómetros
Mediciones de PH, ORP, Conductividad
Corriente, Voltaje
34

AUTOMATIZACION
Relevadores de control
Solenoides
Arrancadores de motor
Alarmas sonoras
Indicadores
35

AUTOMATIZACION
Válvulas de control
Actuadores
Variadores de velocidad
36
AUTOMATIZACION
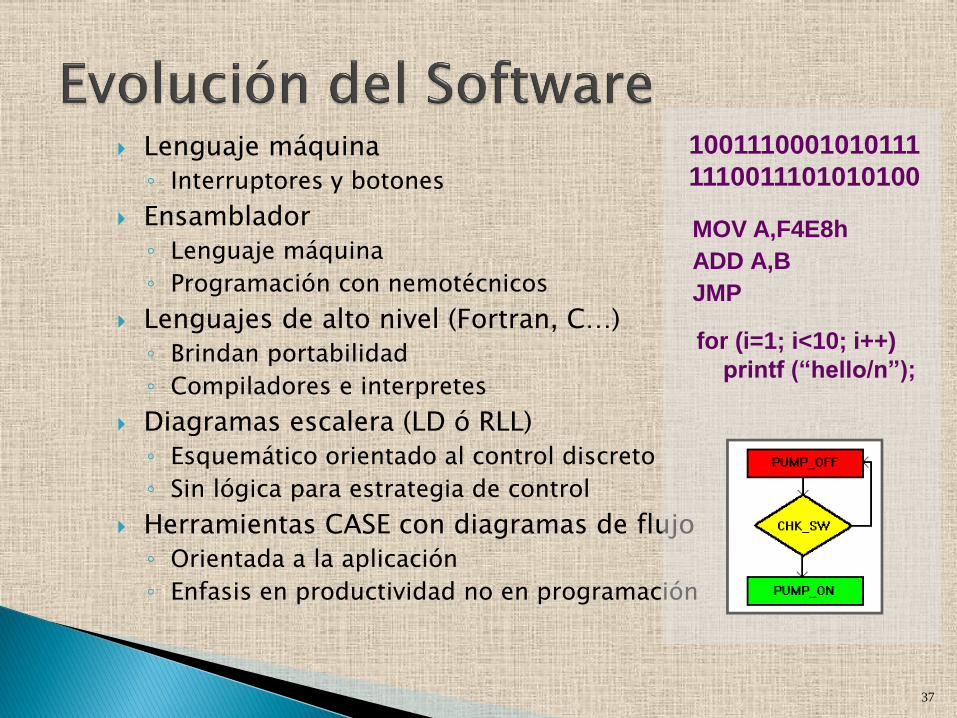
Lenguaje máquina
◦ Interruptores y botones
Ensamblador
◦ Lenguaje máquina
◦ Programación con nemotécnicos
Lenguajes de alto nivel (Fortran, C…)
◦ Brindan portabilidad
◦ Compiladores e interpretes
Diagramas escalera (LD ó RLL)
◦ Esquemático orientado al control discreto
◦ Sin lógica para estrategia de control
Herramientas CASE con diagramas de flujo
◦ Orientada a la aplicación
◦ Enfasis en productividad no en programación
37
1001110001010111
1110011101010100
MOV A,F4E8h
ADD A,B
JMP
for (i=1; i<10; i++)
printf (“hello/n”);
AUTOMATIZACION
Reducir el ciclo de desarrollo
◦ Diseño, depuración, implementación, arranque
Reducir el mantenimiento a largo plazo del Software
◦ Simplificar la documentación, cambios sencillos
Mayor Apertura, Flexibilidad y Capacidad
◦ Integrar funciones, características y aplicaciones
Integrar a todo el negocio
◦ Conectividad corporativa desde el piso de producción hasta los sistemas administrativos
38

AUTOMATIZACION
Una combinación de métodos de programación ◦ IL Lista de instrucciones
Instruction List
◦ ST-Texto estructurado Structured Text
◦ FBD-Bloques de funciones Function Blocks
◦ LD Diagramas escalera Ladder Diagram
◦ SFC-Diagramas secuenciales Sequential Function Charts
39

AUTOMATIZACION
Las principales compañías de software han desarrollado herrramientas amigables para reducir el tiempo de desarrollo y arranque (tiempo al mercado). ◦ Todos los fabricantes de software basado en diagramas
escalera estan buscando la manera de mejorar sus herramientas de programación que fueron diseñadas principalmente para control digital.
◦ Aún los fabricantes de software FBD y SFC han sido forzados a modificar sus técnicas de programación para mantenerse competitivos en el mercado.
◦ Los diagramas de flujo son utilizados por muchos fabricantes de software como la herramienta de configuración más sencilla de utilizar.
40
AUTOMATIZACION
41
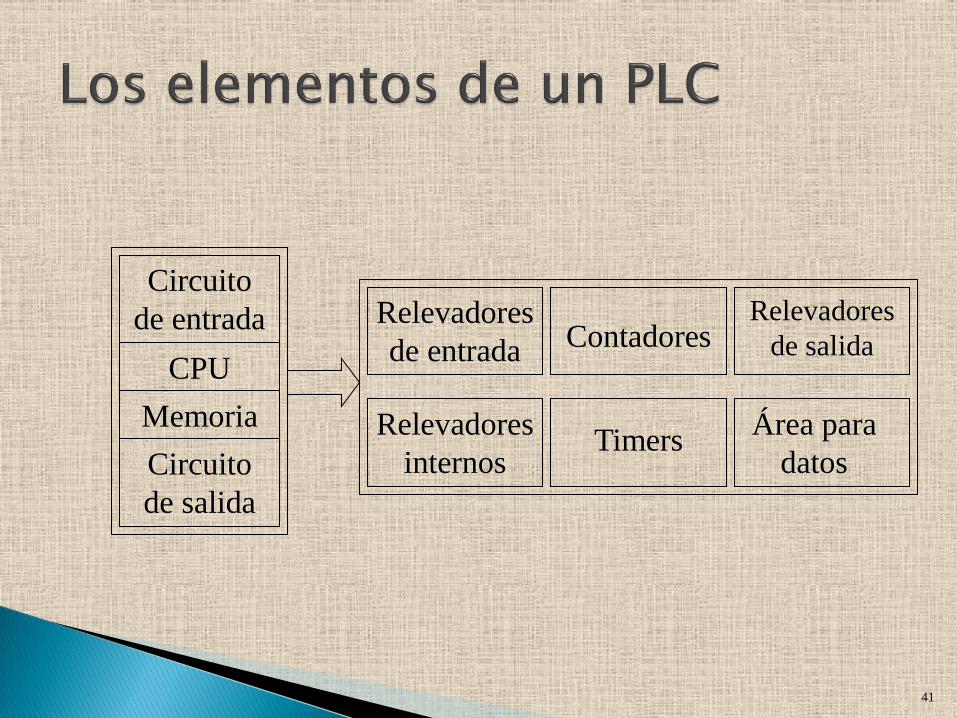
Circuito
de entrada
CPU
Memoria
Circuito
de salida
Relevadores
de entrada
Relevadores
internos
Contadores
Timers
Relevadores
de salida
Área para
datos

AUTOMATIZACION
Relevadores de entrada (Entradas) Están conectados físicamente a los dispositivos del sistema. Reciben su señal de interruptores, selectores o relevadores. El tipo de señal que se recibe se conoce como digital, es decir, solo pueden manejar dos estado hay o no señal (ON-OFF). El rango de voltaje que manejan depende del modelo seleccionado.
42

AUTOMATIZACION
Relevadores internos Estos no se encuentran conectados físicamente ni reciben señales. Son relevadores simulados dentro del PLC que ayudan a construir la lógica de control y permiten trabajar sin la necesidad de relevadores externos. El tipo de señal que se manejan se conoce como digital, es decir, hay o no señal (ON-OFF). Se siguen conociendo en algunos casos como señales ON-OFF solo por los dos estados que pueden tener.
43
AUTOMATIZACION
Contadores Estos tampoco existen físicamente. Son contadores simulados que pueden ser programados para contar pulsos. Normalmente estos contadores tienen capacidad de contar hacia arriba, abajo y en ambas direcciones.
44

AUTOMATIZACION
Timers No existen físicamente. La forma de trabajo y resolución puede variar entre fabricantes. Se utilizan para retardar el encendido o apagado de una señal, ya sea física o interna. El tipo más común es retardo encendido (on delay). Los incrementos pueden variar de 1mseg a 1seg.
45

AUTOMATIZACION
Relevadores de salida (Bobinas o Salidas) Están conectados físicamente al sistema. Envían señales de encendido/apagado (On-Off) a solenoides, luces, etc. El tipo de salida varia de acuerdo a la construcción física y la capacidad de manejo de voltaje y corriente. Pueden ser transistores, relevadores o triacs dependiendo del modelo seleccionado.
46
AUTOMATIZACION
Área para datos Esta es un lugar especial de la memoria dentro del PLC organizado por registros asignados a almacenar información. Se utilizan como almacenamiento temporal para operaciones matemáticas y manipulación de datos. También pueden almacenar información importante de la operación cuando se desconecta el PLC.
47

AUTOMATIZACION
48
Fase 1: Lectura de señales
Fase 2: Ejecución del programa
Fase 3: Escritura de señales
Fase 4: Memory Word Zero

AUTOMATIZACION
Lectura de señales El PLC lee cada entrada para determinar si se encuentra apagada o encendida.
Ejecución del programa El PLC ejecuta nuestro programa una instrucción a al vez. Una vez que ya conoce el estado de las entradas se pueden tomar decisiones en la lógica del programa y almacenar el resultado para su posterior uso.
49

AUTOMATIZACION
Ejecución del programa El PLC ejecuta el programa una instrucción a al vez. Una vez que ya conoce el estado de las entradas se pueden tomar decisiones en la lógica del programa y almacenar el resultado para su posterior uso.
50
AUTOMATIZACION
Escritura de señales El PLC actualiza el estado de las salidas basado en la información obtenida durante la ejecución del programa.
51

AUTOMATIZACION
Memory Word Zero Aunque no es parte del ciclo de operación de nuestro sistema de control, es una etapa que todo PLC debe ejecutar para su operación interna y de comunicación con equipos periféricos. El PLC debe verificar la correcta operación de sus partes, actualizar contadores, timers y ejecutar funciones de comunicación.
52

AUTOMATIZACION
El tiempo de muestreo o scan es el tiempo que le toma al PLC ejecutar los pasos antes mencionados. Del tiempo que tarde en la ejecución de estos pasos dependerá la velocidad a la que puede reaccionar a los eventos que ocurran a su alrededor.
53

AUTOMATIZACION
54
In Out Ejecución In Out Ejecución In Out
SCAN 1
Muestreo 1
Off
On
SCAN 2
Muestreo 2
Señal de entrada

AUTOMATIZACION
55
In Out Ejecución In Out Ejecución In Out
SCAN 1
Muestreo 1
Off
On
SCAN 2
Muestreo 2
En el peor de los casos la señal de entrada debe
mantenerse al menos un tiempo de muestreo
AUTOMATIZACION
56
In Out Ejecución In Out Ejecución In Out
SCAN 1
Muestreo 1
SCAN 2
Muestreo 2
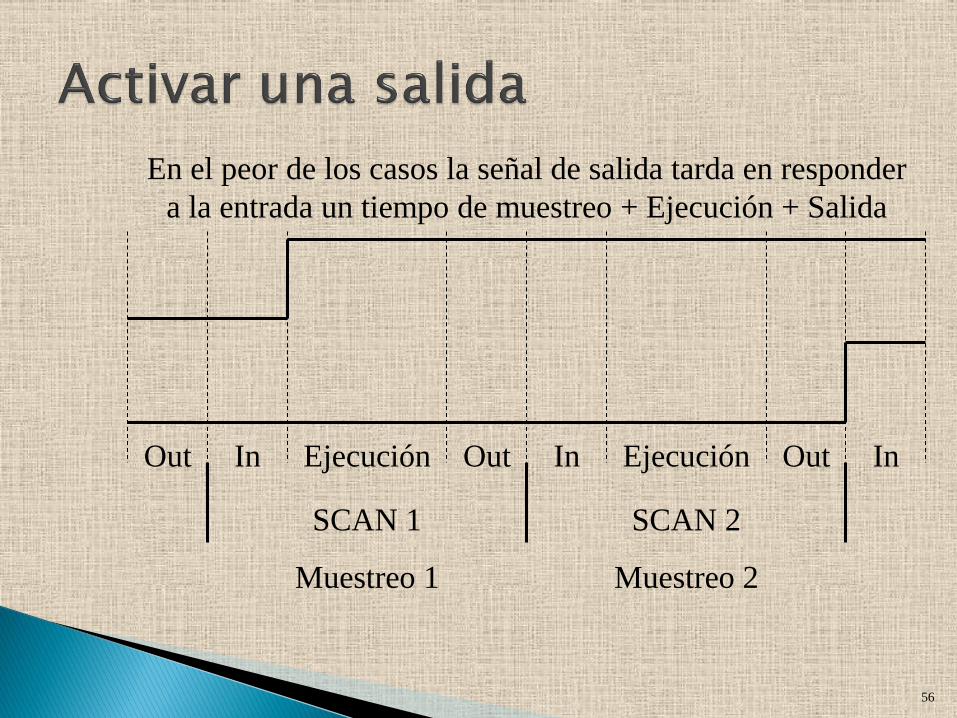
En el peor de los casos la señal de salida tarda en responder
a la entrada un tiempo de muestreo + Ejecución + Salida

AUTOMATIZACION
Un diagrama de tiempo nos muestra de manera gráfica lo que ocurre en nuestro sistema con respecto al tiempo
57
Arranque
Paro
Motor

58
Derecha
Izquierda
Motor
Arriba/abajo
PLC
Motor
Derecha/izquierda
Arriba
Abajo
Control de grúa viajera
Derecha/Izquierda y Arriba/Abajo

AUTOMATIZACION
59
Derecha
Izquierda
Arriba
Abajo
Derecha
Izquierda
Arriba
Abajo
ENTRADAS
SALIDAS

AUTOMATIZACION
Se le conoce también como Binaria y se utiliza de dos formas: ◦ Combinacional
◦ Secuencial
Se le llama binaria porque tiene solo dos valores posibles: ◦ Verdadero, 1 ó su respectiva señal de voltaje (5V)
◦ Falso, 0 ó su respectiva señal de voltaje (0V)
60

AUTOMATIZACION
De acuerdo a la combinación de señales de entrada se obtiene una salida.
Siempre la misma combinación de entradas resulta en la misma salida.
61

AUTOMATIZACION
Son bloques con funciones lógicas establecidas
Por claridad se representan como funciones con dos entradas y una sola salida
62

El bloque lógico más sencillo
La señal de entrada se invierte
Si en la entrada tenemos una señal verdadera en la salida habrá una señal falsa
Entrada Salida
F V
V F
63

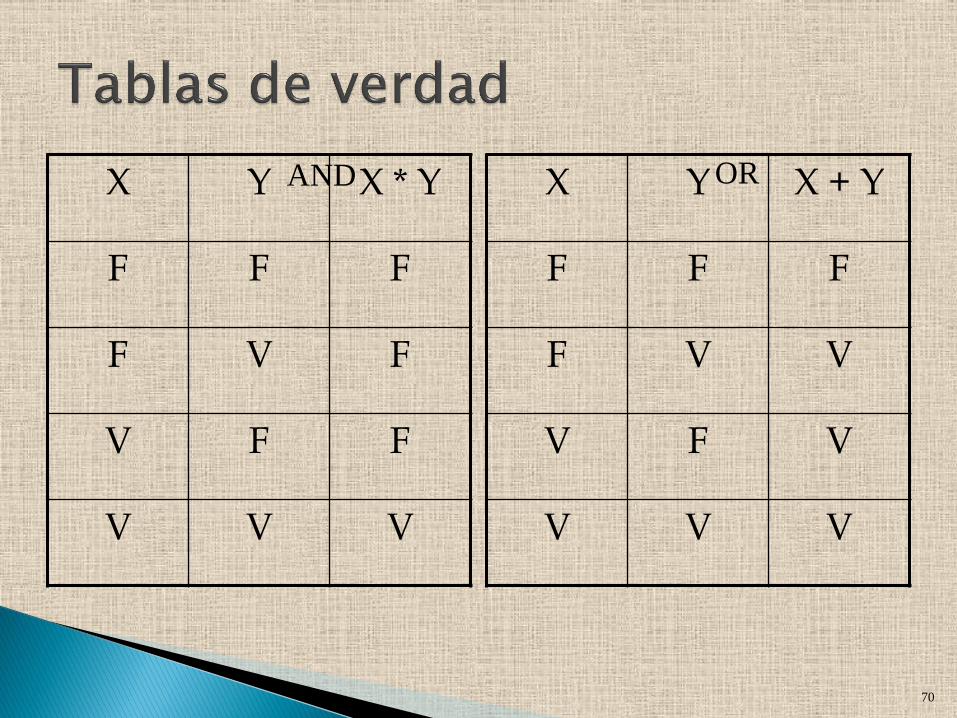
Para que la salida sea verdadera se requiere que todas las señales de entrada sean verdaderas
Cualquier otra combinación de entradas arroja un falso a la salida
X Y X*Y
F F F
F V F
V F F
V V V
64

Para que la salida sea verdadera se requiere que al menos una de las señales de entrada sean verdaderas
Cuando todas las entradas son falsas la salida es falsa
X Y X+Y
F F F
F V V
V F V
V V V
65

66
Arranque
Paro
Motor
PLC
Encendido y paro de un motor desde una estación
De botones.
AUTOMATIZACION
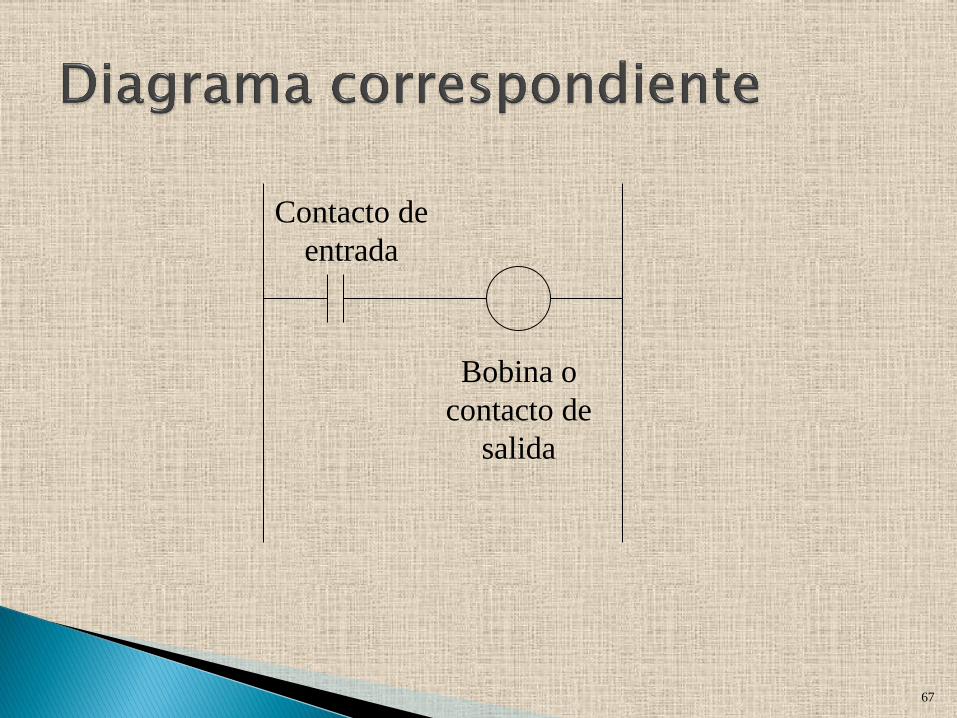
67
Contacto de
entrada
Bobina o
contacto de
salida

AUTOMATIZACION
Se requiere que cada entrada, sin importar el elemento al que esté conectada, sea identificada.
Se requiere que cada salida, sin importar el elemento sobre el que actúa, sea identificada.
Toda bobina y contacto auxiliar debe ser identificado.
68

AUTOMATIZACION
No existe un estándar para identificar a las señales de un PLC.
Cada fabricante define la identificación de las señales.
Existen dos convenciones ampliamente utilizadas una numérica y otra simbólica.
69
AUTOMATIZACION
X Y X * Y
F F F
F V F
V F F
V V V
X Y X + Y
F F F
F V V
V F V
V V V
70
AND OR

AUTOMATIZACION
71
% _ _ # . #
Tipo de Memoria
I : Entrada física
Q: Salida física
M: Memoria
Número de palabra
Número de bit (opcional)
Tamaño de memoria
X: Bit
B: Byte
W: Palabra
D: Doble palabra

72
Arranque
Paro
Motor
PLC
Encendido y paro de un motor desde una estación
De botones.

73
Derecha
Izquierda
Motor
Arriba/abajo
PLC
Motor
Derecha/izquierda
Arriba
Abajo
Control de grúa viajera
Derecha/Izquierda y Arriba/Abajo
AUTOMATIZACION
Entradas digitales
Botón Derecha
Botón Izquierda
Botón Arriba
Botón Abajo
Salidas Digitales
Motor Derecha
Motor Izquierda
Motor Arriba
Motor Abajo
74

Control para concursantes Después de que el
anfitrión termina la pregunta: ◦ Los 3 concursantes
intentan ser los primeros en presionar el botón situado frente a ellos.
◦ La alarma sonará por 10 segundos después de que un participante presione el botón.
◦ La luz indicadora frente a cada jugador se encenderá hasta que sea apagada por el anfitrión
75

AUTOMATIZACION
Entradas Digitales
Botón jugador 1
Botón jugador 2
Botón jugador 3
Botón del anfitrión
Salidas Digitales
Indicador jugador 1
Indicador jugador 2
Indicador jugador 3
Alarma
76
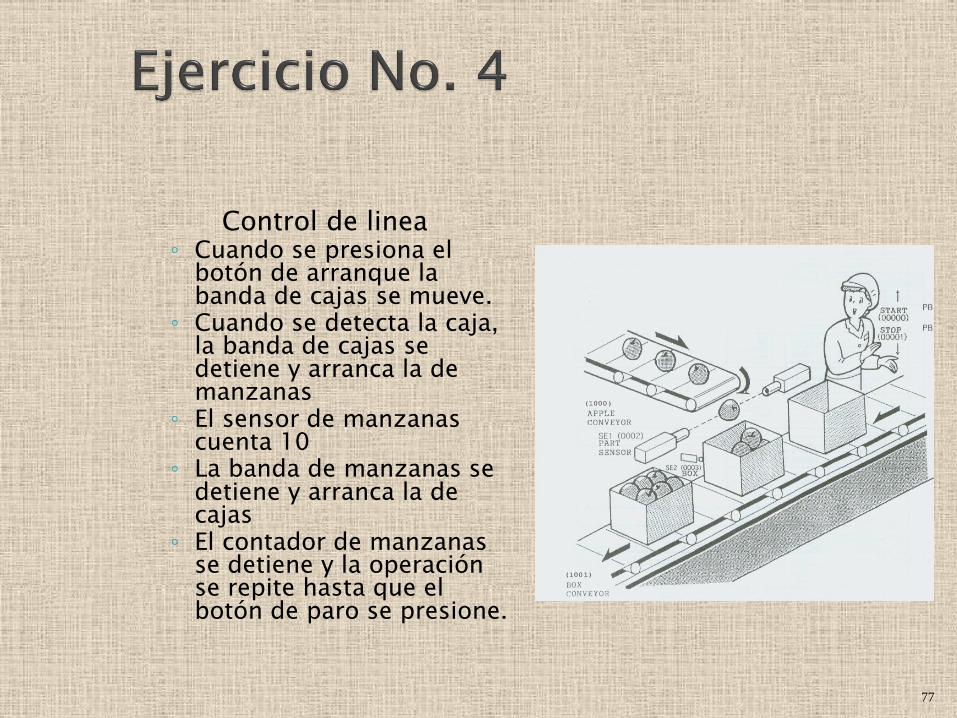
Control de linea ◦ Cuando se presiona el
botón de arranque la banda de cajas se mueve.
◦ Cuando se detecta la caja, la banda de cajas se detiene y arranca la de manzanas
◦ El sensor de manzanas cuenta 10
◦ La banda de manzanas se detiene y arranca la de cajas
◦ El contador de manzanas se detiene y la operación se repite hasta que el botón de paro se presione.
77
AUTOMATIZACION
Entradas Digitales
Botón de arranque
Botón de paro
Sensor de cajas
Sensor de manzanas
Salidas Digitales
Banda de cajas
Banda de manzanas
78

Control de taladro Operación manual
◦ Cuando SW1 se enciende, el motor se mueve hacia delante. Se detiene con SW2. Cuando el taladro llega a LS2, el motor se apaga.
◦ Cuando SW3 se enciende, el motor se mueve en reversa. Se detiene con SW2. Cuando el taladro llega a LS1, el motor se apaga.
Ciclo automático ◦ Cuando PB y LS1 estan
encendidos, el motor se mueve hacia delante hasta que se active LS2.
◦ Un circuito de tiempo (timer) inicia una cuenta descendente. El motor se mueve en reversa cuando el timer llega a 2 segundos.
◦ Cuando llega a LS1 el ciclo se repite.
79

AUTOMATIZACION
Entradas digitales
Botón adelante
Botón atrás
Botón de paro
Límite izquierdo
Límite derecho
Selector manual/auto
Salidas digitales
Indicador auto
Indicador manual
Indicador auto-start
Motor izquierdo
Motor derecho
80

Control de llenado y vaciado de tanque
Cuando se presiona el botón de arranque, la válvula de llenado se enciende y el agua empieza a llenar el tanque. Al mismo tiempo el agitar inicia operación.
Cuando el nivel de agua pasa el sensor inferior y llega al superior, la válvula de alimentación se cierra y se detiene el agitador.
La válvula de drenaje se energiza. Cuando el agua llega al sensor inferior la válvula se cierra.
Cuando el ciclo se realiza cuatro veces la operación se detiene, el indicador de FIN se energiza y no se reinicia la operación hasta que se presione el botón de arranque
81
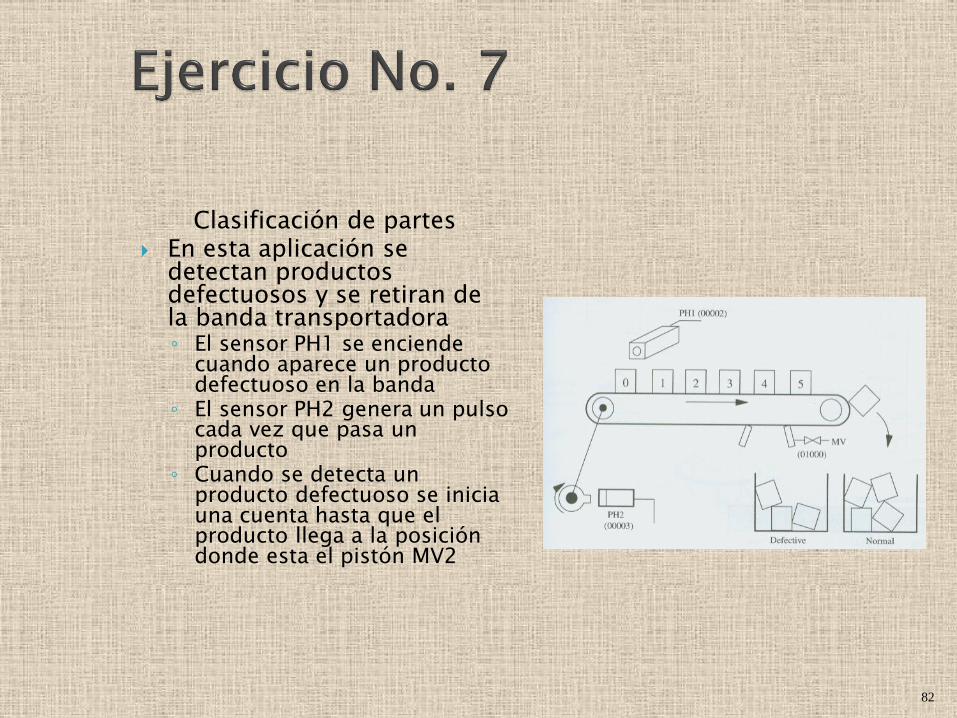
Clasificación de partes En esta aplicación se
detectan productos defectuosos y se retiran de la banda transportadora ◦ El sensor PH1 se enciende
cuando aparece un producto defectuoso en la banda
◦ El sensor PH2 genera un pulso cada vez que pasa un producto
◦ Cuando se detecta un producto defectuoso se inicia una cuenta hasta que el producto llega a la posición donde esta el pistón MV2
82

Control de movimientos de robot
El robot toma las piezas de la banda transportadora A y las coloca en la B ◦ Cuando el botón de
arranque se presiona el robot gira su brazo a favor de las manecillas del reloj
◦ Cuando llega a la posición en la banda A el brazo toma la pieza
◦ Cuando el brazo toma la pieza gira hacia la banda B
◦ Cuando llega a la posición de B deja la pieza
83

Nadie llega a bachiller, sin estudiar y aprender. (Anónimo)
84
Estudiar con esfuerzo y positivismo
trae consigo siempre buenas
recompensas.






























