Embed Size (px)
Citation preview

PX4 Autopilot• Independent, open-source, open-hardware autopilot
system oriented toward autonomous aircraft
• BSD License
• Started in 2009
• Be being developed and used at Computer Vision and Geometry Lab of ETH Zurich and supported by the Autonomous Systems Lab and the Automatic Control Laboratory

Main Software Modules• PX4 Flight Stack
• Flight control modules (Controller, Attitude estimator, MAVLink and etc)
• PX4 Middleware
• Drivers, uORB
• PX4 ESC Firmware
• PX4 Bootloader
• Operating System
• NuttX OS


Pixhawk• 168 MHz Cortex M4F CPU (256 KB RAM, 2 MB
Flash)
• Sensors: 3D ACC / Gyro / MAG / Baro
• Integrated backup, override and failsafe processor with mixing
• microSD slot, 5 UARTs, CAN, I2C, SPI, ADC, etc
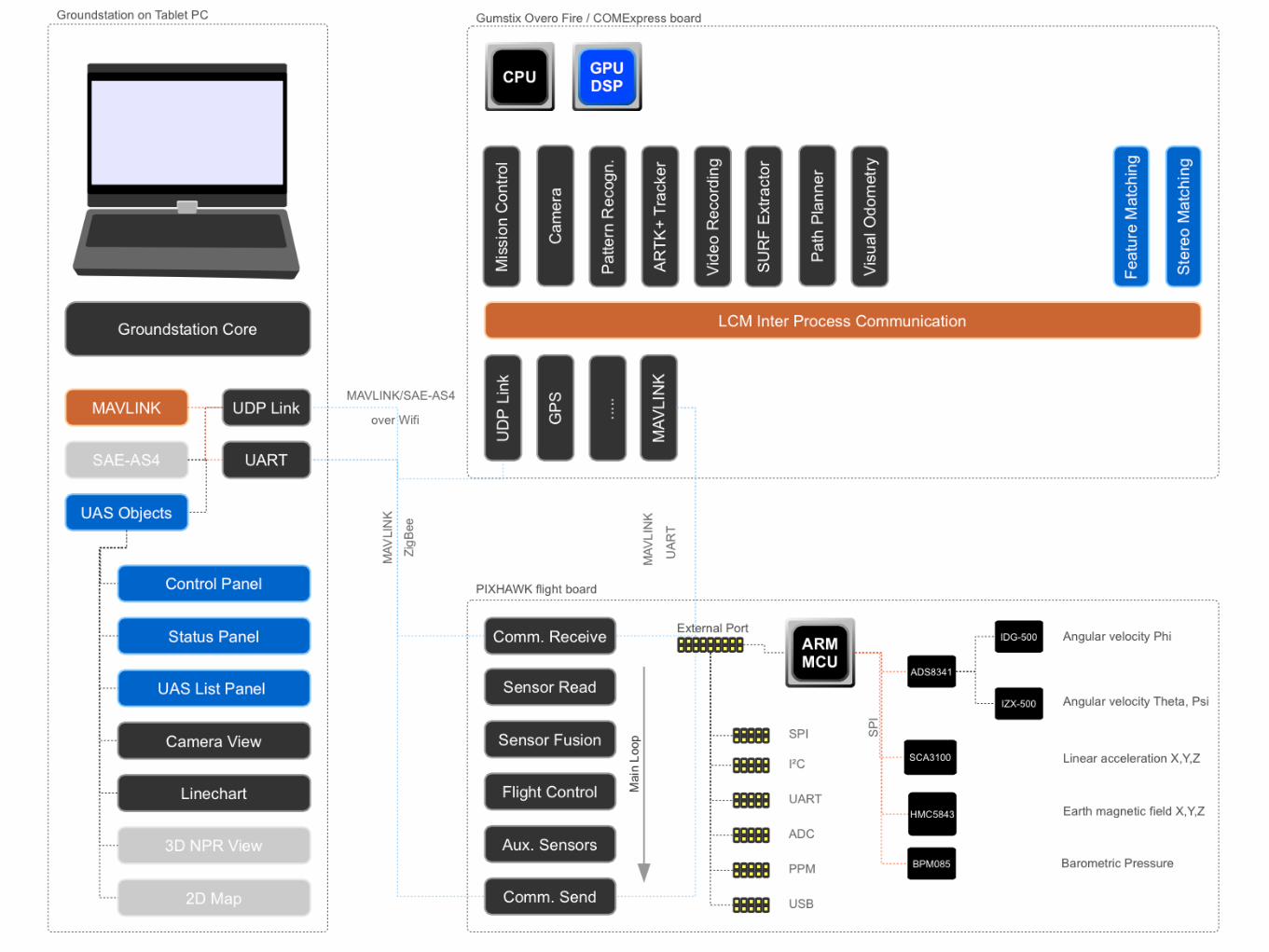

PX4General
Structure

Entire Systemwith
Comm. Modules

Dependency Package
python-serial python-argparse openocd flex bison libncurses5-dev autoconf texinfo build-essential libftdi-dev libtool zlib1g-dev genromfs git-core wget zip python-empy
gcc-arm-none-eabi

Building1. git clone https://github.com/PX4/Firmware
2. git submodule init
3. git submodule update
4. sudo make distclean
5. sudo make archives
6. sudo make
Flashing
• /Images/px4fmu-v2_default.px4
• make upload px4fum-v2_default

Reference• http://en.wikipedia.org/wiki/PX4_autopilot
• https://pixhawk.org/start
• https://pixhawk.org/firmware/source_code
• https://github.com/PX4
• https://pixhawk.org/dev/nuttx/building_and_flashing_console
• https://pixhawk.org/dev/toolchain_installation_lin






























