Embed Size (px)
Citation preview
Solving Large-Scale Machine Learning Problemsin a Distributed Way
Martin Takac
Cognitive Systems Institute Group Speaker Series
June 09 2016
1 / 28
Outline
1 Machine Learning - Examples and Algorithm
2 Distributed Computing
3 Learning Large-Scale Deep Neural Network (DNN)
2 / 28
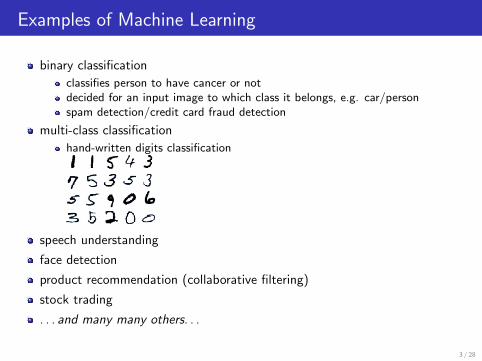
Examples of Machine Learning
binary classification
classifies person to have cancer or notdecided for an input image to which class it belongs, e.g. car/personspam detection/credit card fraud detection
multi-class classification
hand-written digits classification
speech understanding
face detection
product recommendation (collaborative filtering)
stock trading
. . . and many many others. . .
3 / 28

Support Vector Machines (SVM)
blue: healthy person
green: e.g. patient with lung cancer
Exhaled breath analysis for lung cancer: predict if patient has cancer or not
4 / 28
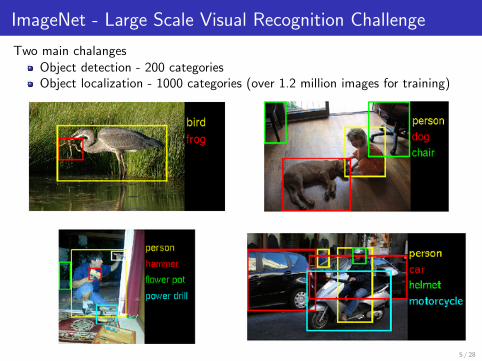
ImageNet - Large Scale Visual Recognition Challenge
Two main chalangesObject detection - 200 categoriesObject localization - 1000 categories (over 1.2 million images for training)
5 / 28
ImageNet - Large Scale Visual Recognition Challenge
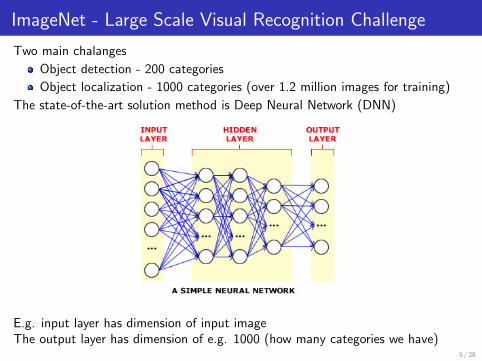
Two main chalanges
Object detection - 200 categories
Object localization - 1000 categories (over 1.2 million images for training)
The state-of-the-art solution method is Deep Neural Network (DNN)
E.g. input layer has dimension of input imageThe output layer has dimension of e.g. 1000 (how many categories we have)
5 / 28

Deep Neural Network
we have to learn the weights between neurons (blue arrows)
the neural network is defining a non-linear and non-convex function (ofweights w) from input x to output y :
y = f (w ; x)
6 / 28
Example - MNIST handwritten digits recognition
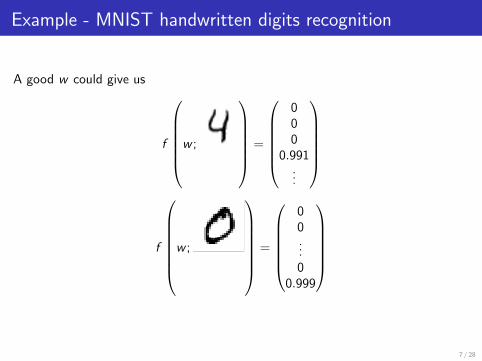
A good w could give us
f
w ;
=
000
0.991...
f
w ;
=
00...0
0.999
7 / 28
Mathematical Formulation
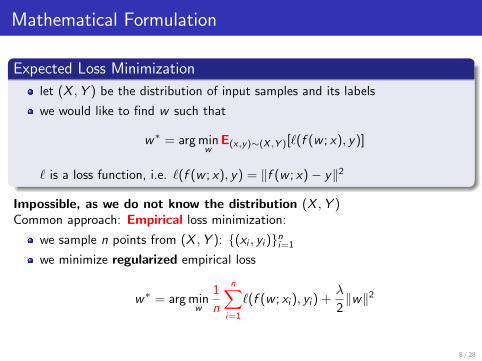
Expected Loss Minimization
let (X ,Y ) be the distribution of input samples and its labels
we would like to find w such that
w∗ = arg minw
E(x,y)∼(X ,Y )[`(f (w ; x), y)]
` is a loss function, i.e. `(f (w ; x), y) = ‖f (w ; x)− y‖2
Impossible, as we do not know the distribution (X ,Y )Common approach: Empirical loss minimization:
we sample n points from (X ,Y ): {(xi , yi )}ni=1
we minimize regularized empirical loss
w∗ = arg minw
1
n
n∑i=1
`(f (w ; xi ), yi ) +λ
2‖w‖2
8 / 28
Mathematical Formulation
Expected Loss Minimization
let (X ,Y ) be the distribution of input samples and its labels
we would like to find w such that
w∗ = arg minw
E(x,y)∼(X ,Y )[`(f (w ; x), y)]
` is a loss function, i.e. `(f (w ; x), y) = ‖f (w ; x)− y‖2
Impossible, as we do not know the distribution (X ,Y )
Common approach: Empirical loss minimization:
we sample n points from (X ,Y ): {(xi , yi )}ni=1
we minimize regularized empirical loss
w∗ = arg minw
1
n
n∑i=1
`(f (w ; xi ), yi ) +λ
2‖w‖2
8 / 28
Mathematical Formulation
Expected Loss Minimization
let (X ,Y ) be the distribution of input samples and its labels
we would like to find w such that
w∗ = arg minw
E(x,y)∼(X ,Y )[`(f (w ; x), y)]
` is a loss function, i.e. `(f (w ; x), y) = ‖f (w ; x)− y‖2
Impossible, as we do not know the distribution (X ,Y )Common approach: Empirical loss minimization:
we sample n points from (X ,Y ): {(xi , yi )}ni=1
we minimize regularized empirical loss
w∗ = arg minw
1
n
n∑i=1
`(f (w ; xi ), yi ) +λ
2‖w‖2
8 / 28

Stochastic Gradient Descent (SGD) Algorithm
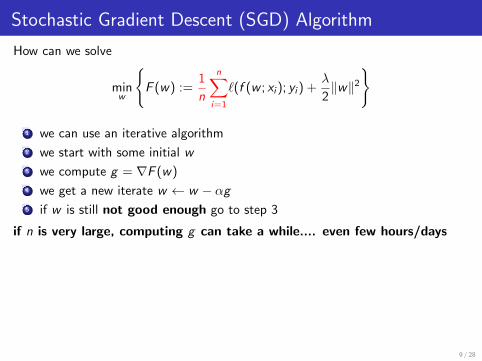
How can we solve
minw
{F (w) :=
1
n
n∑i=1
`(f (w ; xi ); yi ) +λ
2‖w‖2
}
1 we can use an iterative algorithm
2 we start with some initial w
3 we compute g = ∇F (w)
4 we get a new iterate w ← w − αg5 if w is still not good enough go to step 3
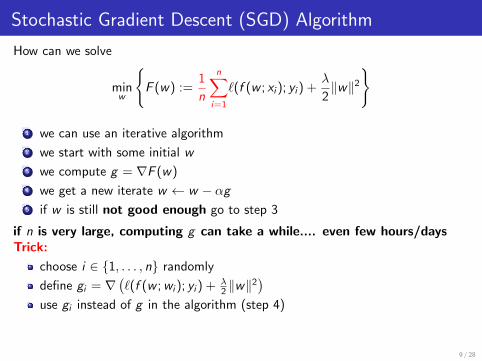
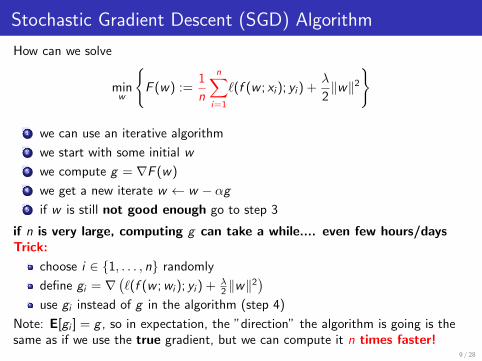
if n is very large, computing g can take a while.... even few hours/daysTrick:
choose i ∈ {1, . . . , n} randomly
define gi = ∇(`(f (w ;wi ); yi ) + λ
2 ‖w‖2)
use gi instead of g in the algorithm (step 4)
Note: E[gi ] = g , so in expectation, the ”direction” the algorithm is going is thesame as if we use the true gradient, but we can compute it n times faster!
9 / 28
Stochastic Gradient Descent (SGD) Algorithm
How can we solve
minw
{F (w) :=
1
n
n∑i=1
`(f (w ; xi ); yi ) +λ
2‖w‖2
}
1 we can use an iterative algorithm
2 we start with some initial w
3 we compute g = ∇F (w)
4 we get a new iterate w ← w − αg5 if w is still not good enough go to step 3
if n is very large, computing g can take a while.... even few hours/days
Trick:
choose i ∈ {1, . . . , n} randomly
define gi = ∇(`(f (w ;wi ); yi ) + λ
2 ‖w‖2)
use gi instead of g in the algorithm (step 4)
Note: E[gi ] = g , so in expectation, the ”direction” the algorithm is going is thesame as if we use the true gradient, but we can compute it n times faster!
9 / 28
Stochastic Gradient Descent (SGD) Algorithm
How can we solve
minw
{F (w) :=
1
n
n∑i=1
`(f (w ; xi ); yi ) +λ
2‖w‖2
}
1 we can use an iterative algorithm
2 we start with some initial w
3 we compute g = ∇F (w)
4 we get a new iterate w ← w − αg5 if w is still not good enough go to step 3
if n is very large, computing g can take a while.... even few hours/daysTrick:
choose i ∈ {1, . . . , n} randomly
define gi = ∇(`(f (w ;wi ); yi ) + λ
2 ‖w‖2)
use gi instead of g in the algorithm (step 4)
Note: E[gi ] = g , so in expectation, the ”direction” the algorithm is going is thesame as if we use the true gradient, but we can compute it n times faster!
9 / 28
Stochastic Gradient Descent (SGD) Algorithm
How can we solve
minw
{F (w) :=
1
n
n∑i=1
`(f (w ; xi ); yi ) +λ
2‖w‖2
}
1 we can use an iterative algorithm
2 we start with some initial w
3 we compute g = ∇F (w)
4 we get a new iterate w ← w − αg5 if w is still not good enough go to step 3
if n is very large, computing g can take a while.... even few hours/daysTrick:
choose i ∈ {1, . . . , n} randomly
define gi = ∇(`(f (w ;wi ); yi ) + λ
2 ‖w‖2)
use gi instead of g in the algorithm (step 4)
Note: E[gi ] = g , so in expectation, the ”direction” the algorithm is going is thesame as if we use the true gradient, but we can compute it n times faster!
9 / 28

Outline
1 Machine Learning - Examples and Algorithm
2 Distributed Computing
3 Learning Large-Scale Deep Neural Network (DNN)
10 / 28
The Architecture
What if the size of data {(xi , yi )} exceeds the memory of a singlecomputing node?
each node can store portion of the data {(xi , yi )}each node is connected to the computer network
they can communicate with any other node (over maybe 1 or more switches)
Fact: every communication is much more expensive then accessing local data(can be even 100,000 times slower).
11 / 28

The Architecture
What if the size of data {(xi , yi )} exceeds the memory of a singlecomputing node?
each node can store portion of the data {(xi , yi )}each node is connected to the computer network
they can communicate with any other node (over maybe 1 or more switches)
Fact: every communication is much more expensive then accessing local data(can be even 100,000 times slower).
11 / 28

Outline
1 Machine Learning - Examples and Algorithm
2 Distributed Computing
3 Learning Large-Scale Deep Neural Network (DNN)
12 / 28
Using SGD for DNN in Distributed Way
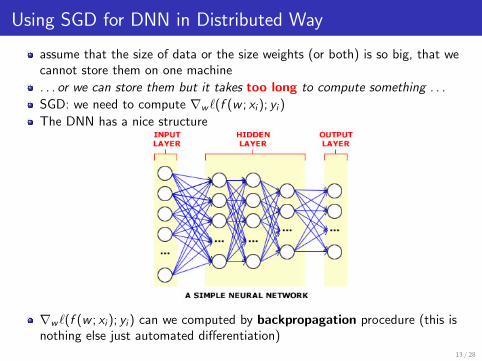
assume that the size of data or the size weights (or both) is so big, that wecannot store them on one machine
. . . or we can store them but it takes too long to compute something . . .
SGD: we need to compute ∇w `(f (w ; xi ); yi )
The DNN has a nice structure
∇w `(f (w ; xi ); yi ) can we computed by backpropagation procedure (this isnothing else just automated differentiation)
13 / 28
Why is SGD a Bad Distributed Algorithm
it samples only 1 sample and computes gi (this is very fast)
then w is updated
each update of w requires a communication (cost c seconds)
hence one iteration is suddenly much slower then if we would run SGD onone computer
The trick: Mini-batch SGDIn each iteration
1 Choose randomly S ⊂ {1, 2, . . . , n} with |S | = b2 Use gb = 1
b
∑i∈S gi instead of just gi
Cost of one epochnumber of MPI calls / epoch n/b
amount of data send over network nb × log(N)× sizeof (w)
if we increase b → n we would minimize amount of data and number ofnumber of communications per epoch! Caveat: there is no free lunch!Very large b means slower convergence!
14 / 28

Why is SGD a Bad Distributed Algorithm
it samples only 1 sample and computes gi (this is very fast)
then w is updated
each update of w requires a communication (cost c seconds)
hence one iteration is suddenly much slower then if we would run SGD onone computer
The trick: Mini-batch SGDIn each iteration
1 Choose randomly S ⊂ {1, 2, . . . , n} with |S | = b2 Use gb = 1
b
∑i∈S gi instead of just gi
Cost of one epochnumber of MPI calls / epoch n/b
amount of data send over network nb × log(N)× sizeof (w)
if we increase b → n we would minimize amount of data and number ofnumber of communications per epoch! Caveat: there is no free lunch!Very large b means slower convergence!
14 / 28
Why is SGD a Bad Distributed Algorithm
it samples only 1 sample and computes gi (this is very fast)
then w is updated
each update of w requires a communication (cost c seconds)
hence one iteration is suddenly much slower then if we would run SGD onone computer
The trick: Mini-batch SGDIn each iteration
1 Choose randomly S ⊂ {1, 2, . . . , n} with |S | = b2 Use gb = 1
b
∑i∈S gi instead of just gi
Cost of one epochnumber of MPI calls / epoch n/b
amount of data send over network nb × log(N)× sizeof (w)
if we increase b → n we would minimize amount of data and number ofnumber of communications per epoch!
Caveat: there is no free lunch!Very large b means slower convergence!
14 / 28

Why is SGD a Bad Distributed Algorithm
it samples only 1 sample and computes gi (this is very fast)
then w is updated
each update of w requires a communication (cost c seconds)
hence one iteration is suddenly much slower then if we would run SGD onone computer
The trick: Mini-batch SGDIn each iteration
1 Choose randomly S ⊂ {1, 2, . . . , n} with |S | = b2 Use gb = 1
b
∑i∈S gi instead of just gi
Cost of one epochnumber of MPI calls / epoch n/b
amount of data send over network nb × log(N)× sizeof (w)
if we increase b → n we would minimize amount of data and number ofnumber of communications per epoch! Caveat: there is no free lunch!Very large b means slower convergence!
14 / 28
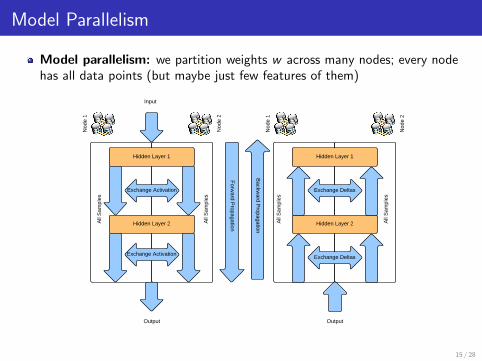
Model Parallelism
Model parallelism: we partition weights w across many nodes; every nodehas all data points (but maybe just few features of them)
Hidden Layer 1
Hidden Layer 2
Output
Input
Forward Propagation
Hidden Layer 1
Hidden Layer 2
Output
Backward Propagation
Node
1
Node
1
Node
2
Node
2
All S
ampl
es
All S
ampl
es
All S
ampl
es
All S
ampl
es
Exchange Activation
Exchange Activation
Exchange Deltas
Exchange Deltas
15 / 28

Data Parallelism
Data parallelism: we partition data-samples across many nodes, each nodehas a fresh copy of w
Hidden Layer 1
Hidden Layer 2
Output
Input
Forward Propagation
Hidden Layer 1
Hidden Layer 2
Output
Backward Propagation
Node
1
Node
1
Node
2
Node
2
Parti
al S
ampl
es
Parti
al S
ampl
es
Parti
al S
ampl
es
Parti
al S
ampl
es
Hidden Layer 1
Hidden Layer 2
Hidden Layer 1
Hidden Layer 2
Exchange Gradient
16 / 28
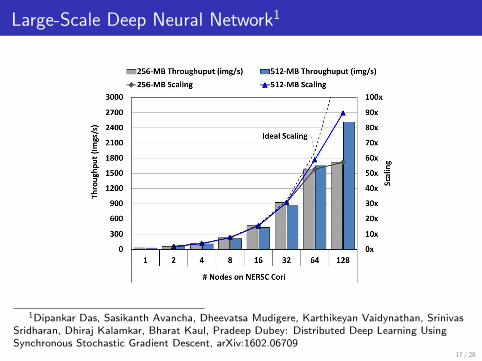
Large-Scale Deep Neural Network1
1Dipankar Das, Sasikanth Avancha, Dheevatsa Mudigere, Karthikeyan Vaidynathan, SrinivasSridharan, Dhiraj Kalamkar, Bharat Kaul, Pradeep Dubey: Distributed Deep Learning UsingSynchronous Stochastic Gradient Descent, arXiv:1602.06709
17 / 28

There is almost no speedup for large b
18 / 28
The Dilemma
large b allows algorithm to be efficiently run on large computer cluster (morenodes)
very large b doesn’t reduce number of iterations, but each iteration is moreexpensive!
The Trick: Do not use just gradient, but use also Hessian (Martens 2010)
Caveat: Hessian matrix can be very large, e.g. the dimension of weights forTIMIT datasets is almost 1.5M, hence to store Hessian we would need almost10TB.The Trick:We can use Hessian Free approach (we need to be able to compute justHessian-vector products)Algorithm:
w ← w − α[∇2F (w)]−1∇F (w)
19 / 28
The Dilemma
large b allows algorithm to be efficiently run on large computer cluster (morenodes)
very large b doesn’t reduce number of iterations, but each iteration is moreexpensive!
The Trick: Do not use just gradient, but use also Hessian (Martens 2010)Caveat: Hessian matrix can be very large, e.g. the dimension of weights forTIMIT datasets is almost 1.5M, hence to store Hessian we would need almost10TB.
The Trick:We can use Hessian Free approach (we need to be able to compute justHessian-vector products)Algorithm:
w ← w − α[∇2F (w)]−1∇F (w)
19 / 28
The Dilemma
large b allows algorithm to be efficiently run on large computer cluster (morenodes)
very large b doesn’t reduce number of iterations, but each iteration is moreexpensive!
The Trick: Do not use just gradient, but use also Hessian (Martens 2010)Caveat: Hessian matrix can be very large, e.g. the dimension of weights forTIMIT datasets is almost 1.5M, hence to store Hessian we would need almost10TB.The Trick:We can use Hessian Free approach (we need to be able to compute justHessian-vector products)
Algorithm:w ← w − α[∇2F (w)]−1∇F (w)
19 / 28
The Dilemma
large b allows algorithm to be efficiently run on large computer cluster (morenodes)
very large b doesn’t reduce number of iterations, but each iteration is moreexpensive!
The Trick: Do not use just gradient, but use also Hessian (Martens 2010)Caveat: Hessian matrix can be very large, e.g. the dimension of weights forTIMIT datasets is almost 1.5M, hence to store Hessian we would need almost10TB.The Trick:We can use Hessian Free approach (we need to be able to compute justHessian-vector products)Algorithm:
w ← w − α[∇2F (w)]−1∇F (w)
19 / 28

Non-convexity
We want to minimizemin
wF (w)
∇2F (w) is NOT positive semi-definite at any w !
20 / 28

Computing Step
recall the algorithm
w ← w − α[∇2F (w)]−1∇F (w)
we need to compute p = [∇2F (w)]−1∇F (w), i.e. to solve
∇2F (w)p = ∇F (w) (1)
we can use few iterations of CG method to solve it(CG assumes that ∇2F (w) � 0)
In our case it may not be true, hence, it is suggested to stop CG sooner, if itis detected during CG that ∇2F (w) is indefinite
We can use a Bi-CG algorithm to solve (1) and modify the algorithm2 asfollows
w ← w − α
{p, if pT∇F (x) > 0,
−p, otherwise
PS: we use just b samples to estimate ∇2∇F (w)2Xi He, Dheevatsa Mudigere, Mikhail Smelyanskiy and Martin Takac: Large Scale Distributed
Hessian-Free Optimization for Deep Neural Network, arXiv:1606.00511, 2016.21 / 28
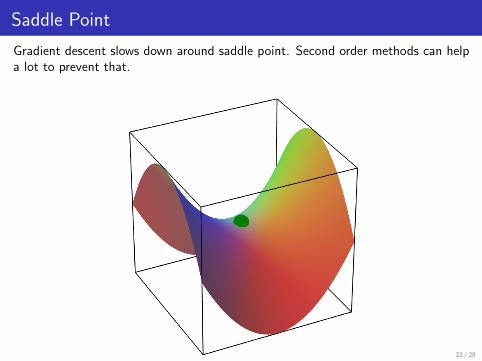
Saddle Point
Gradient descent slows down around saddle point. Second order methods can helpa lot to prevent that.
22 / 28
50 100 150 200 250 300 350 400
10−3
10−2
10−1
100
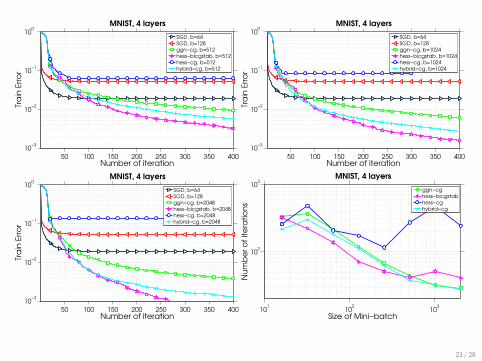
MNIST, 4 layers
Number of iteration
Tra
in E
rro
r
SGD, b=64
SGD, b=128
ggn−cg, b=512
hess−bicgstab, b=512
hess−cg, b=512
hybrid−cg, b=512
50 100 150 200 250 300 350 400
10−3
10−2
10−1
100
MNIST, 4 layers
Number of iteration
Tra
in E
rro
r
SGD, b=64
SGD, b=128
ggn−cg, b=1024
hess−bicgstab, b=1024
hess−cg, b=1024
hybrid−cg, b=1024
50 100 150 200 250 300 350 400
10−3
10−2
10−1
100
MNIST, 4 layers
Number of iteration
Tra
in E
rro
r
SGD, b=64
SGD, b=128
ggn−cg, b=2048
hess−bicgstab, b=2048
hess−cg, b=2048
hybrid−cg, b=2048
101
102
103
102
103
MNIST, 4 layers
Size of Mini−batch
Nu
mb
er
of
Ite
ratio
ns
ggn−cg
hess−bicgstab
hess−cg
hybrid−cg
23 / 28

1 1.5 2 2.5 3 3.5 4 4.5 5
100
101
102
103
TIMIT, T=18, b=512
log2(Number of Nodes)
Ru
n T
ime
pe
r It
era
tio
n
Gradient
CG
Linesearch
1 1.5 2 2.5 3 3.5 4 4.5 5
100
101
102
103
TIMIT, T=18, b=1024
log2(Number of Nodes)
Ru
n T
ime
pe
r It
era
tio
n
Gradient
CG
Linesearch
1 1.5 2 2.5 3 3.5 4 4.5 5
100
101
102
103
TIMIT, T=18, b=4096
log2(Number of Nodes)
Ru
n T
ime
pe
r It
era
tio
n
Gradient
CG
Linesearch
1 1.5 2 2.5 3 3.5 4 4.5 5
101
102
103
TIMIT, T=18, b=8192
log2(Number of Nodes)
Ru
n T
ime
pe
r It
era
tio
n
Gradient
CG
Linesearch
24 / 28
1 1.5 2 2.5 3 3.5 4 4.5 5
100
101
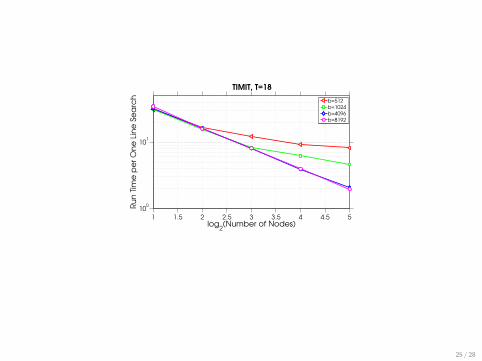
TIMIT, T=18
log2(Number of Nodes)
Ru
n T
ime
pe
r O
ne
Lin
e S
ea
rch
b=512
b=1024
b=4096
b=8192
25 / 28

Learning Artistic Style by Deep Neural Network3
3Joint work with Jiawei Zhang, based on Leon A. Gatys, Alexander S. Ecker, Matthias Bethge, A Neural Algorithm of Artistic Style, arxiv 1508.06576
26 / 28

Learning Artistic Style by Deep Neural Network3
3Joint work with Jiawei Zhang, based on Leon A. Gatys, Alexander S. Ecker, Matthias Bethge, A Neural Algorithm of Artistic Style, arxiv 1508.06576
26 / 28

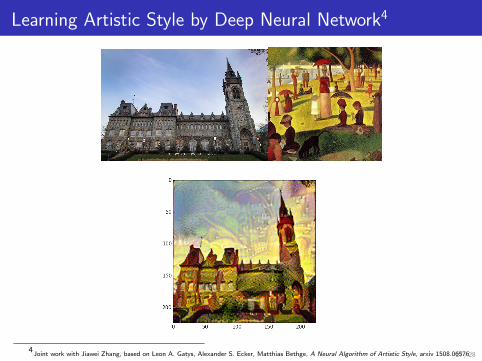
Learning Artistic Style by Deep Neural Network4
4Joint work with Jiawei Zhang, based on Leon A. Gatys, Alexander S. Ecker, Matthias Bethge, A Neural Algorithm of Artistic Style, arxiv 1508.0657627 / 28
Learning Artistic Style by Deep Neural Network4
4Joint work with Jiawei Zhang, based on Leon A. Gatys, Alexander S. Ecker, Matthias Bethge, A Neural Algorithm of Artistic Style, arxiv 1508.0657627 / 28

References
1 Albert Berahas, Jorge Nocedal and Martin Takac: A Multi-Batch L-BFGS Method for MachineLearning, arXiv:1605.06049, 2016.
2 Xi He, Dheevatsa Mudigere, Mikhail Smelyanskiy and Martin Takac:Large Scale Distributed Hessian-Free Optimization for Deep Neural Network, arXiv:1606.00511, 2016.
3 Chenxin Ma and Martin Takac: Partitioning Data on Features or Samples in Communication-EfficientDistributed Optimization?, OptML@NIPS 2015.
4 Chenxin Ma, Virginia Smith, Martin Jaggi, Michael I. Jordan, Peter Richtarik and Martin Takac: Addingvs. Averaging in Distributed Primal-Dual Optimization, ICML 2015.
5 Martin Jaggi, Virginia Smith, Martin Takac, Jonathan Terhorst, Thomas Hofmann and Michael I.Jordan: Communication-Efficient Distributed Dual Coordinate Ascent, NIPS 2014.
6 Richtarik, P. and Takac, M.: Distributed coordinate descent method for learning with big data, JournalPaper Journal of Machine Learning Research (to appear), 2016
7 Richtarik, P. and Takac, M.: On optimal probabilities in stochastic coordinate descent methods,Optimization Letters, 2015.
8 Richtarik, P. and Takac, M.: Parallel coordinate descent methods for big data optimization,Mathematical Programming, 2015.
9 Richtarik, P. and Takac, M.: Iteration complexity of randomized block-coordinate descent methods forminimizing a composite function, Mathematical Programming, 2012.
10 Takac, M., Bijral, A., Richtarik, P. and Srebro, N.: Mini-batch primal and dual methods for SVMs, InICML, 2013.
11 Qu, Z., Richtarik, P. and Zhang, T.: Randomized dual coordinate ascent with arbitrary sampling,arXiv:1411.5873, 2014.
12 Qu, Z., Richtarik, P., Takac, M. and Fercoq, O.: SDNA: Stochastic Dual Newton Ascent for EmpiricalRisk Minimization, arXiv:1502.02268, 2015.
13 Tappenden, R., Takac, M. and Richtarik, P., On the Complexity of Parallel Coordinate Descent, arXiv:1503.03033, 2015.
28 / 28





























