Embed Size (px)
Citation preview
Oleksiy Kravchenko
Senior Data Scientist, Zoral Labs, Kyiv
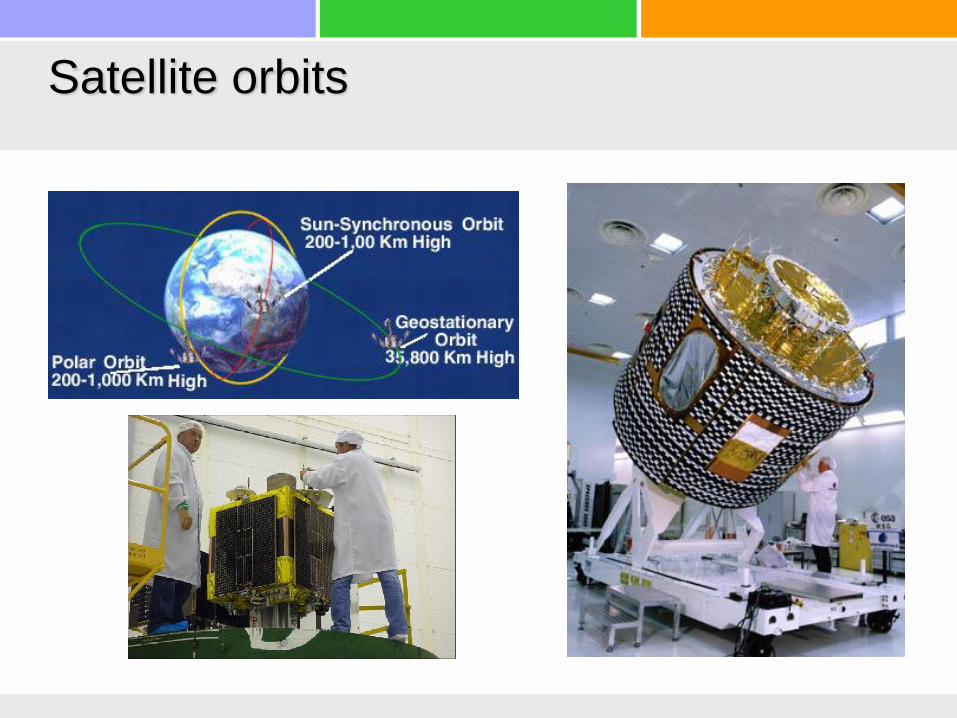
Satellite orbits

Geostationary satellite images - MSG
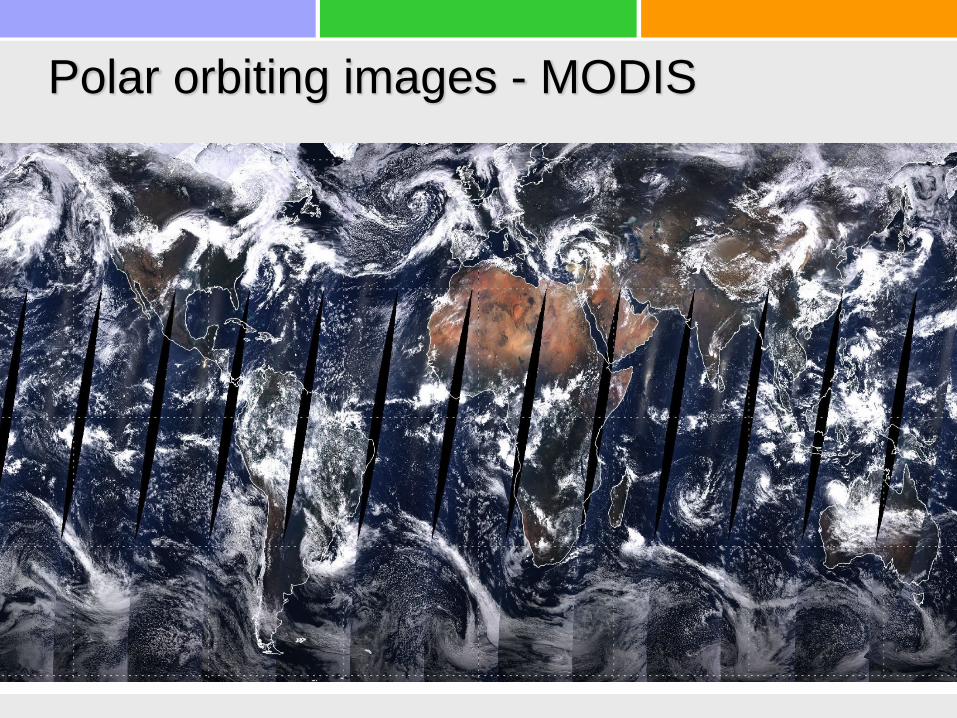
Polar orbiting images - MODIS

Multispectral data
Data
– Low resolution
• MODIS (250м)
• Proba-V (100м)
• Sentinel-3 (300 m)
– Medium resolution
• Landsat-7 (30м)
• Landsat-8 (30м)
• Sentinel-1 (20м, 2013)
• Sentinel-2 (10м, 2015)
Довжина хвилі, нм
Від
би
ва
юча
зд
атн
ість Поглинання
хлорофілу Поглинання води
Поглинання
сухої біомаси
Визначається
внутрішньою
структурою
покриву
Видимий
(VIS)
Ближній
інфрачервоний
(NIR)
Середній інфрачервоний
(SWIR)
NDVI = (NIR – RED)/
(NIR + RED)
Applications
Agriculture– Agricultural statistics
• Crop area estimation
– Yield forecasting– Crop state & dynamics monitoring– Drought monitoring– Irrigated land monitoring– Crop rotation control, subsides control– Precision agriculture
• Variable prescription maps
Forestry– Clear-cuts mapping, species mapping– Biomass estimation
Land cover mapping

7
Satellite features for crop classificationL5 2011-11-08
EO1 2012-05-23
L7 2012-05-10
Sich2 2012-04-26

Temporal dynamics
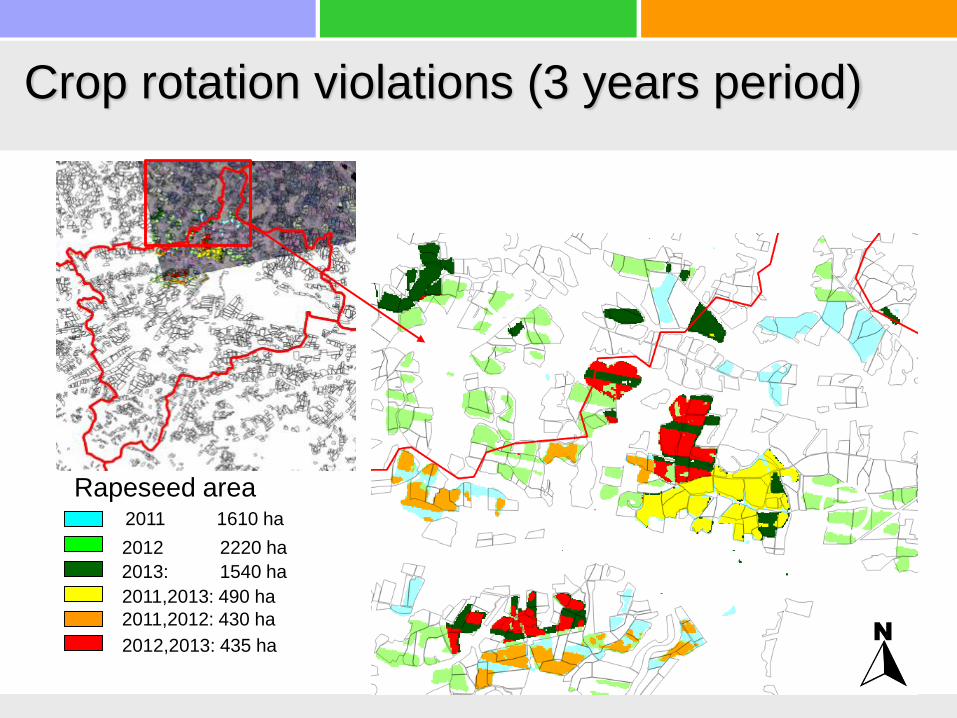
Crop rotation violations (3 years period)
Rapeseed area
2011,2013: 490 ha
2011,2012: 430 ha
2012,2013: 435 ha
2013: 1540 ha
2012 2220 ha
2011 1610 ha

Lviv site, SAR data example, 2013
Landsat8
2013-06-15 Radarsat-2
2013-06-13
No clouds problems
Better crop
separation with SAR
than with optical data
Winter rapeseed
Maize

Gorodotsky county, Lviv region, UkraineCrop mapping, 2013
• Classification accuracy– total 81 %
– Winter rapeseed: 96%
– +10% by using SAR data

Crop area estimation
Project ЕС JRC “Crop area estimation with satellite images in Ukraine”, 2009-2011
Satellite data Ground data
Processing· Orthorectification
· Segmentation
· Classification
Stratified Area
Frame Sampling
Along the road
survey
% pixe ls c lassified as cerea ls
% o
ats
in
gro
un
d s
urv
ey
SegmentsCrop field boundariesLC map
Area estimates
(pixel counting)
Data fusionAdjustment of area
estimates
(Regression estimator)
Final results· Area estimates
· Accuracy
assessment
Data:MODISAWiFSLandsat-5/TMLISS-IIIRapidEye
Satellite data effect:costs decrease in 1.5 times

Area estimation
Odesa region
regsample yVyV
rel_eff
yybx yybxdif x reg x
VyNn
Nnn
G
nreg
xy()
1
1
3
21
2
2
2 2G
kx
x
x
33
( )Vynys rreg xy
112 2
regsample yVyV ˆˆrel_eff
r = 0.986rel_eff = 33.4
r = 0.997rel_eff = 165.8
Data Areath. ha
Error(2σ)ths. Ha
%
Sample 108.32 51.2 57.4%
MODIS 95.18 8.88 9.32%
Landsat 96.18 3.98 4.14%
Ministry of Agric. 101,0 - -

Yield forecast
Winter wheat yield forecast, 2013Forecast issue date – May 1st , 2013

Precision agriculture

Irrigation monitoring
August, 2012

Vegetation State Estimation (Forward &
Inverse Problems)
Leaf model
(PROSPECT)
Canopy RTM
(4SAIL)
Atmosphere RTM
(6S)
ll TR ,
3. Vegetation state
estimation using
radiometrically corrected
satellite data
Inverse problems
2. Vegetation state
estimation using satellite
data with atmospheric
correction
1. Vegetation state
estimation using in-situ
spectra
,, vs
soilR
lSLADLAI ,,
mwab CCCN, ,,
canopyR
TOAR
'
ss
s
s
vv s
dEk E
dz
dEa E E s E
dz
dEa E E s E
dz
dEK E E E w E
dz
1( ) ( ) ( )i i ek K C k
N
90 1,90,
90 1,901
NN
N
RR
R

Satellite product validation (crop state)
• Ukrainian GEO JECAM polygon
• Hemispherical photography (circular fisheye lenses)
LAI=0.22 fCover=16% ALA=16º
LAI=4.0 fCover=79% ALA=65º
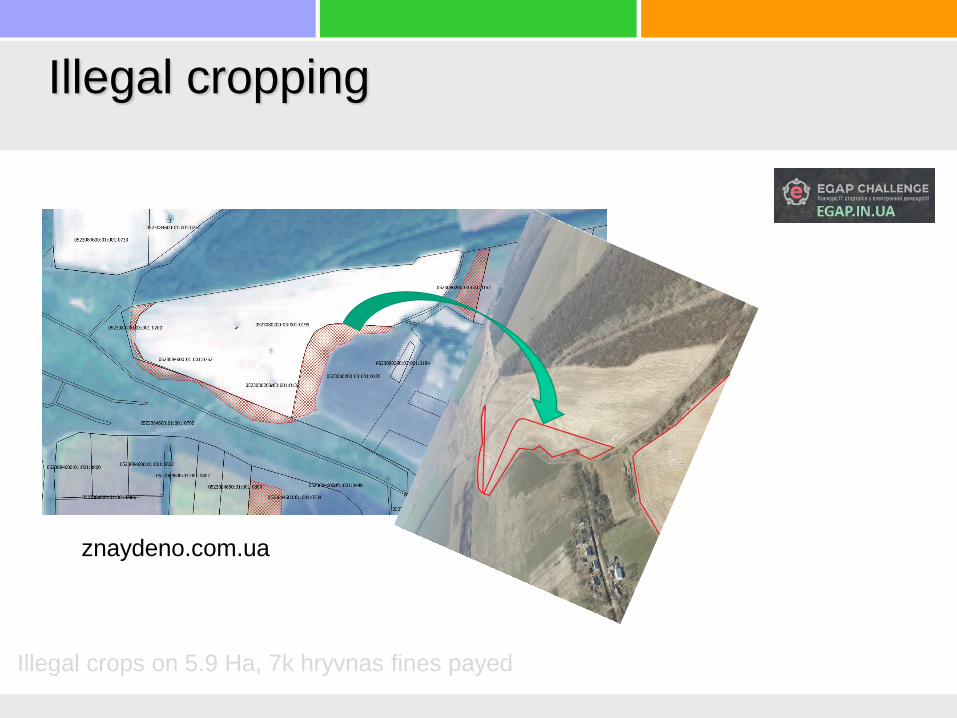
Illegal cropping
znaydeno.com.ua
Illegal crops on 5.9 Ha, 7k hryvnas fines payed

Satellite image preprocessing.
Sentinel-2 example
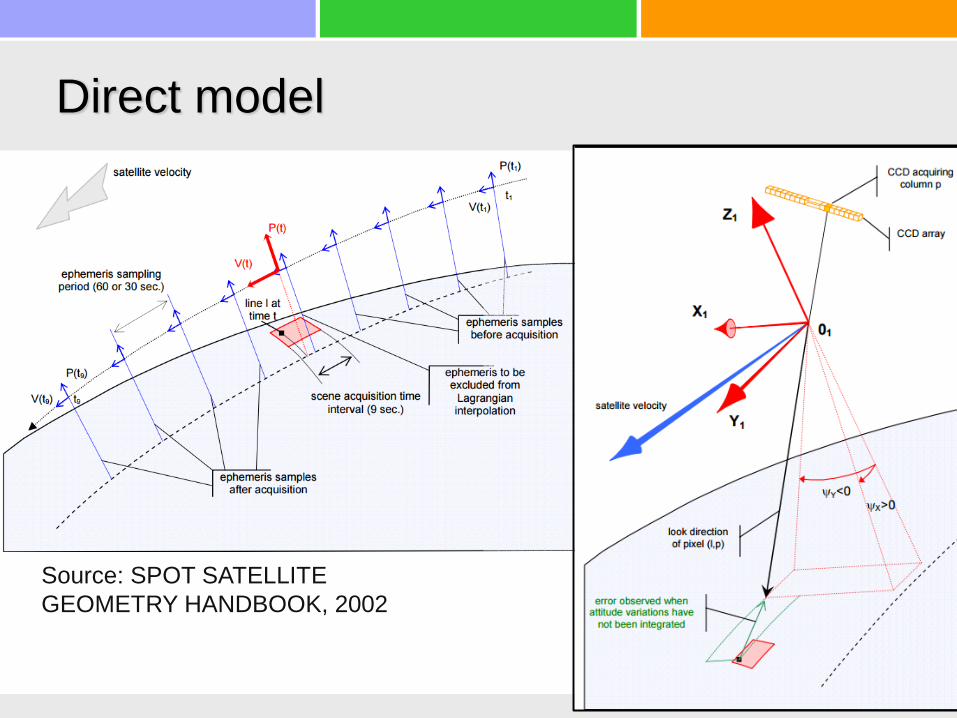
Source: SPOT SATELLITE
GEOMETRY HANDBOOK, 2002
Direct model

Model parameters
• Time, location, velocity (satellite center mass), 1Hz
• Exterior attitude, 1Hz
– measured by star trackers
• Interior camera attitude within satellite coordinate system
– rotation matrix to align camera and star tracker
• Angular position of each pixel in camera coordinates
– Angular position of pixel assembly in focal plane
– Lenses distortion
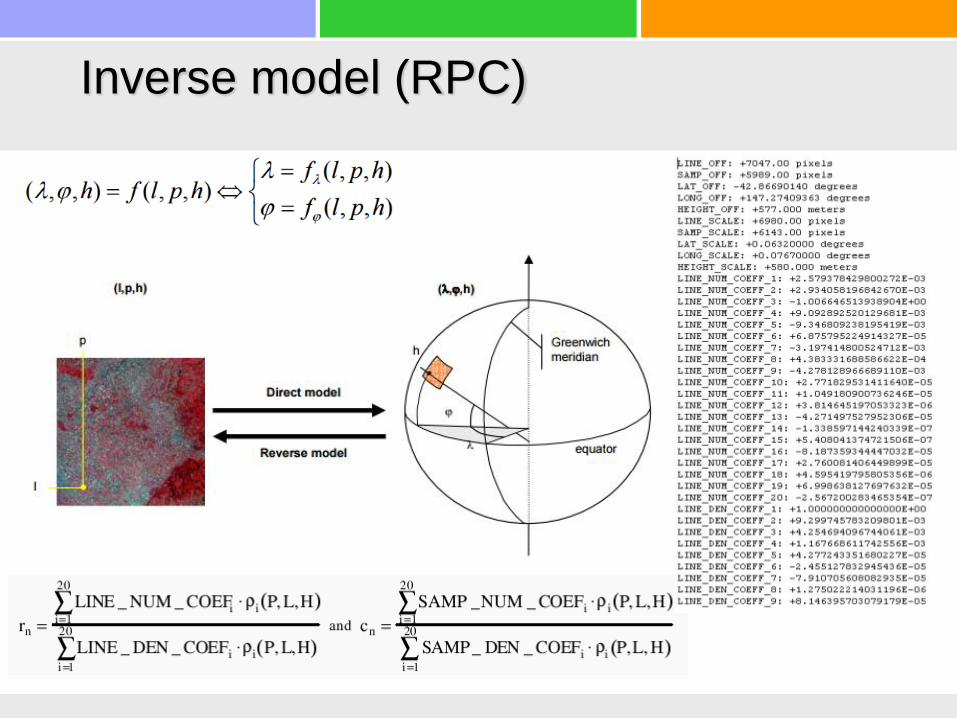
Inverse model (RPC)

Direct model georeferensing of Sich2 satellite• Geolocation error
– RapidEye (20-50 м)
– Landsat5 (30 м)
– Spot6,7 (10 м)
– Sich2 (200-700 м)• Kyiv (240 м)
• Shatsk (550 м)
Shatsky National ParkSich2, 2011-11-02
550m
USGS approachfor Landsat5

Drones georeferencing by telemetry
data only

Processing pipeline
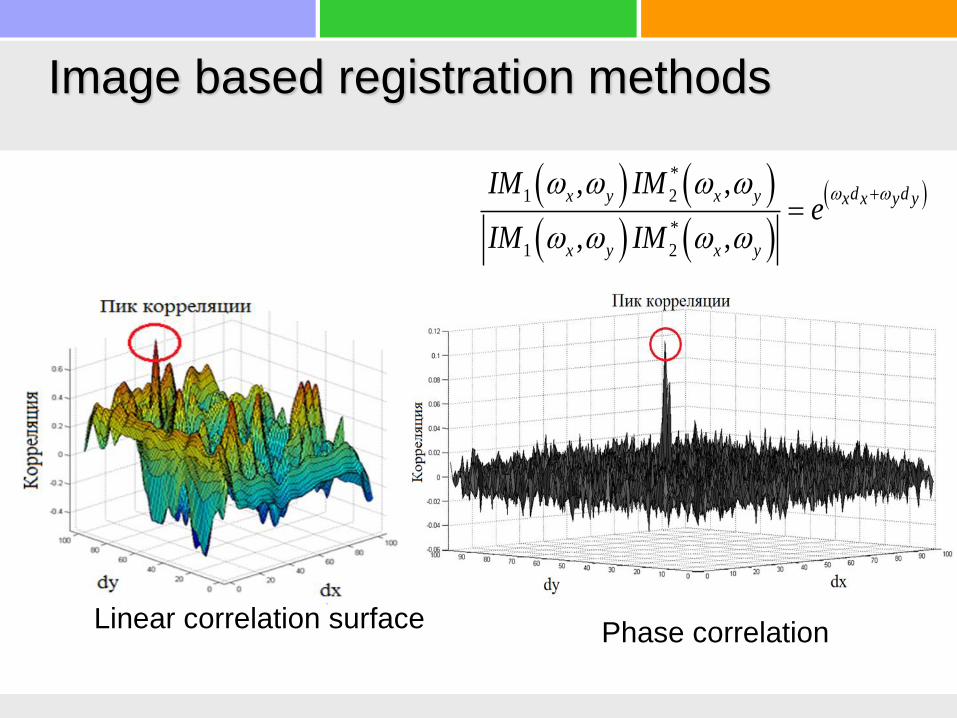
Image based registration methods
Linear correlation surfacePhase correlation
*
1 2
*
1 2
, ,
, ,
d dx y x y x x y y
x y x y
IM IMe
IM IM

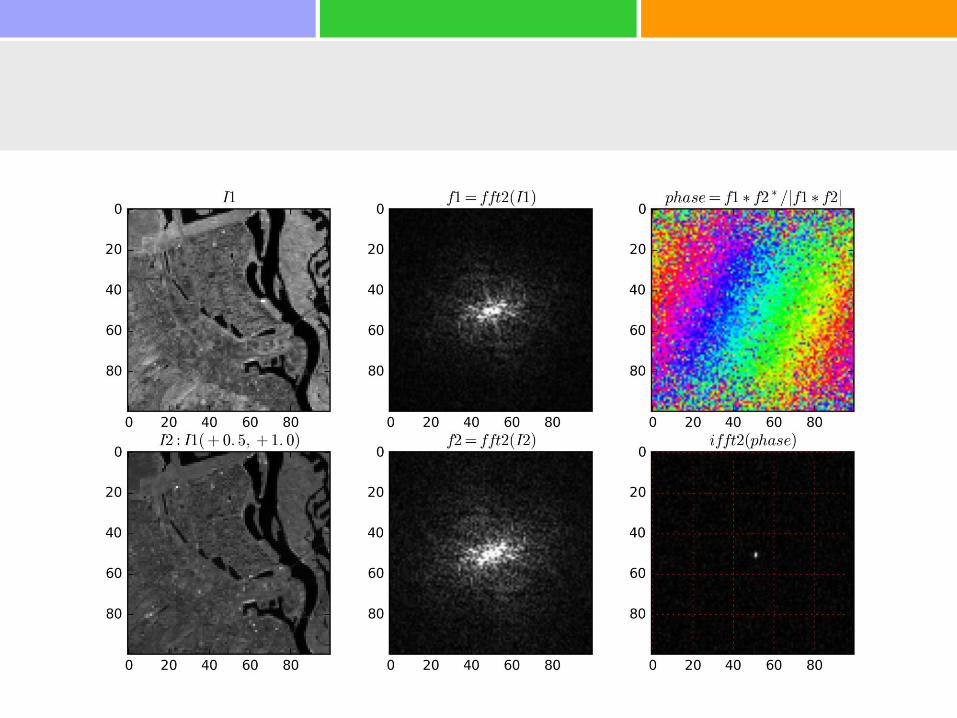
Phase correlation explained











Accuracy estimation

Linear vs. phase correlation
10-100 more control points

Odesa region
20 м ~ 6”
Sich2 image georeferencing using Landsat data as base map
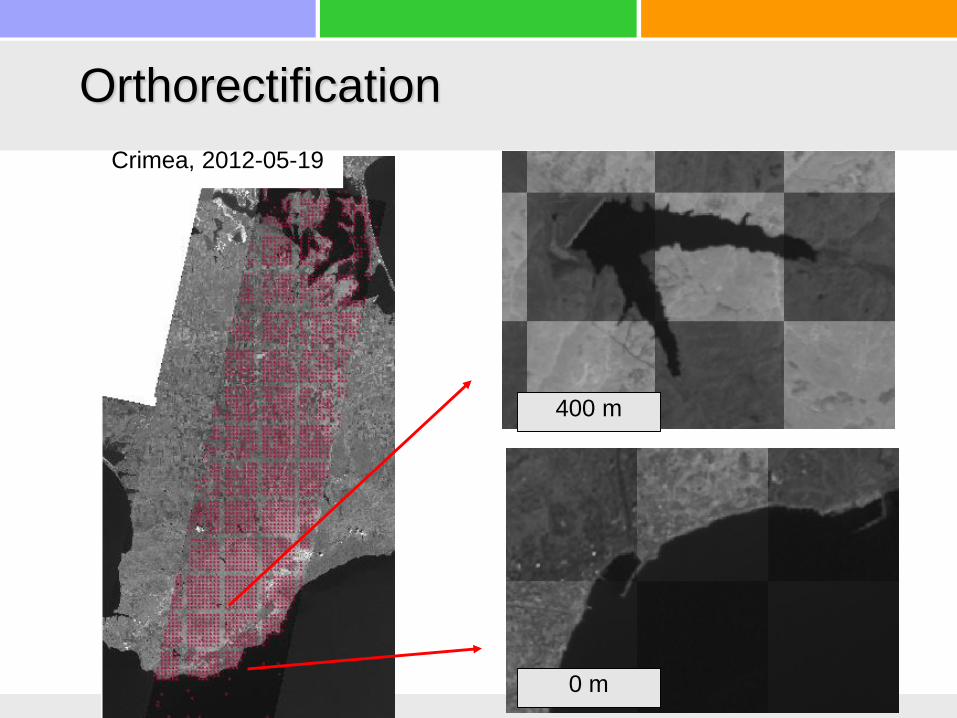
400 m
0 m
Crimea, 2012-05-19
Orthorectification

1A
1А-Orho
Zaporizhzhya, 2012-02-11
Georef. example (1)

Khersonsky region, 2012 -05-12
1A
1A-Ortho
Georef. example (2)

Pixel assembly calibration
Corrections.Metadata
2011-10-03
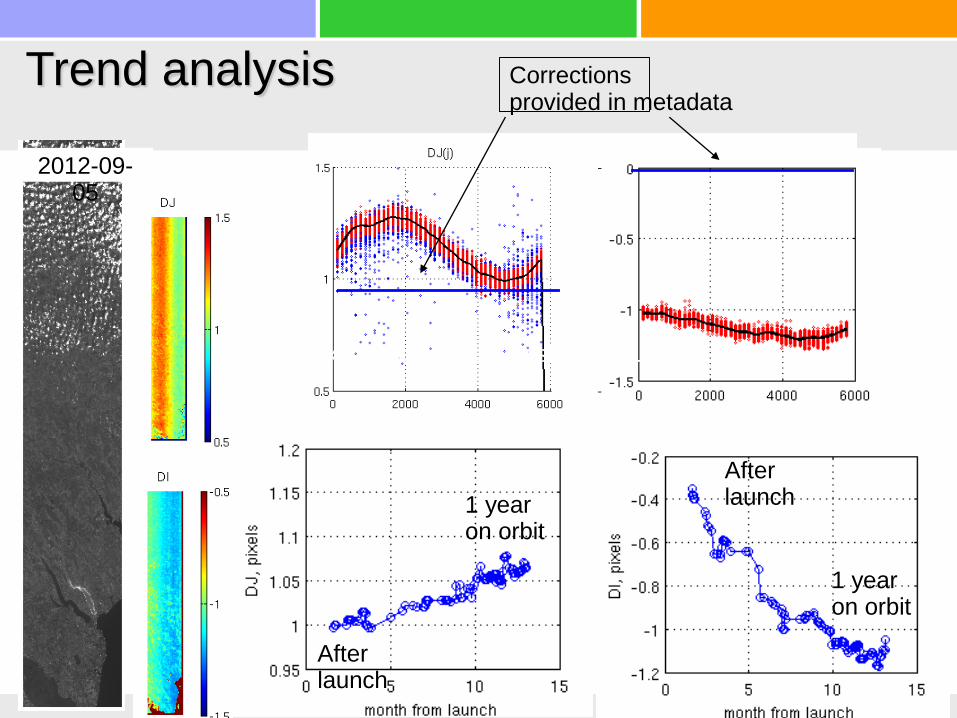
Trend analysis Corrections provided in metadata
2012-09-05
Afterlaunch
Afterlaunch
1 yearon orbit
Pixel assembly coregistration (1)
1 yearon orbit

Band coregistration
PAN NIR
Along-track shifts
DEMSRTM
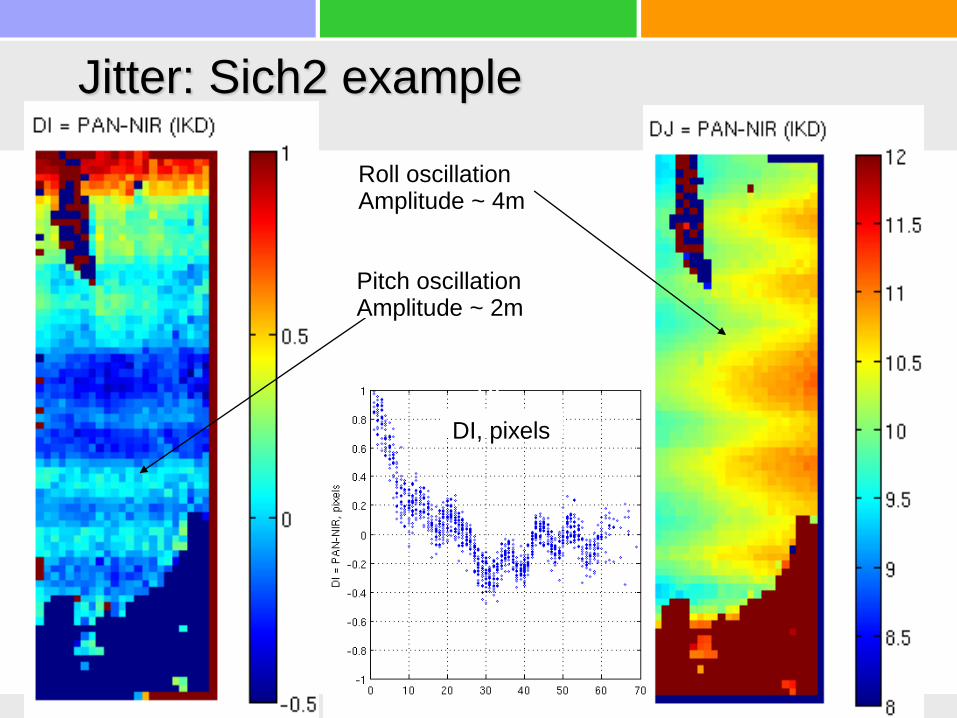
Jitter: Sich2 example
Roll oscillationAmplitude ~ 4m
DI
Pitch oscillationAmplitude ~ 2m
DI
DI, pixels
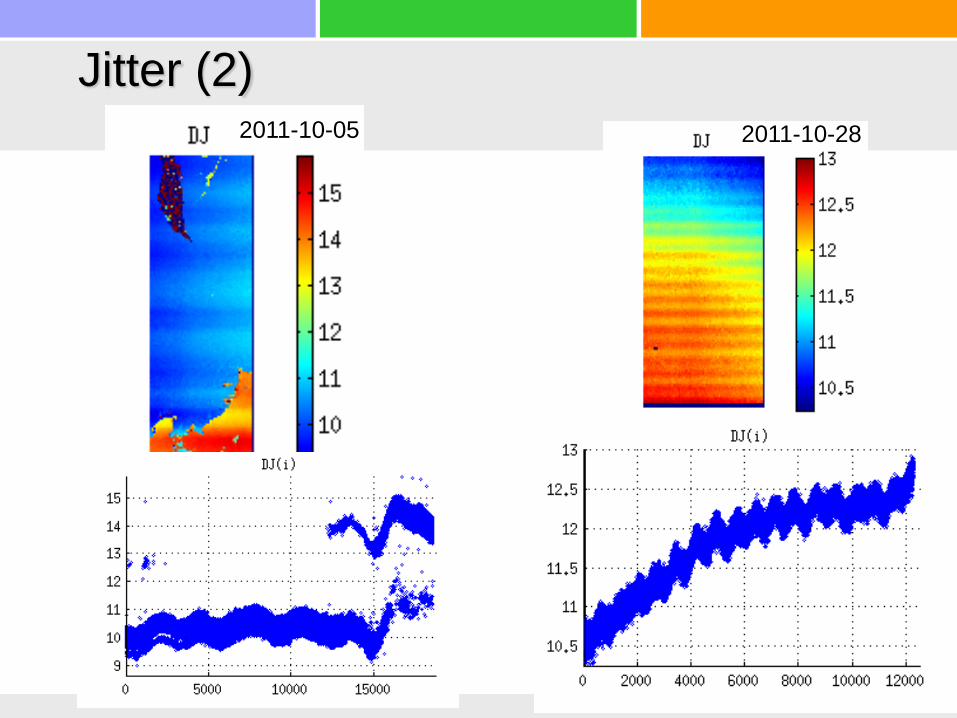
Jitter (2)2011-10-05 2011-10-28
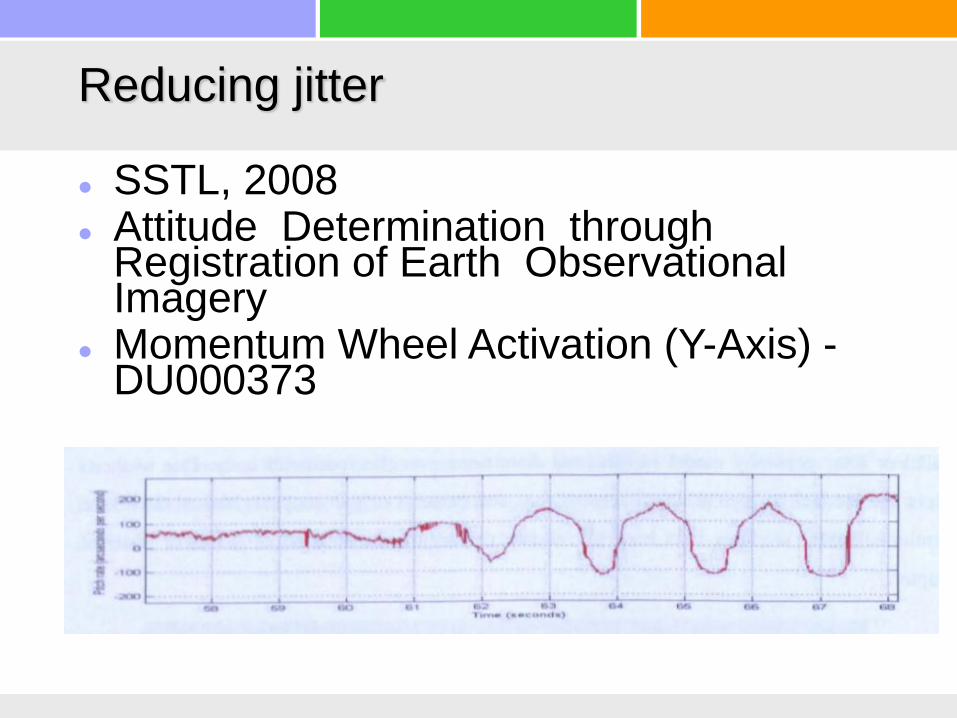
Reducing jitter
SSTL, 2008 Attitude Determination through
Registration of Earth Observational Imagery
Momentum Wheel Activation (Y-Axis) -DU000373
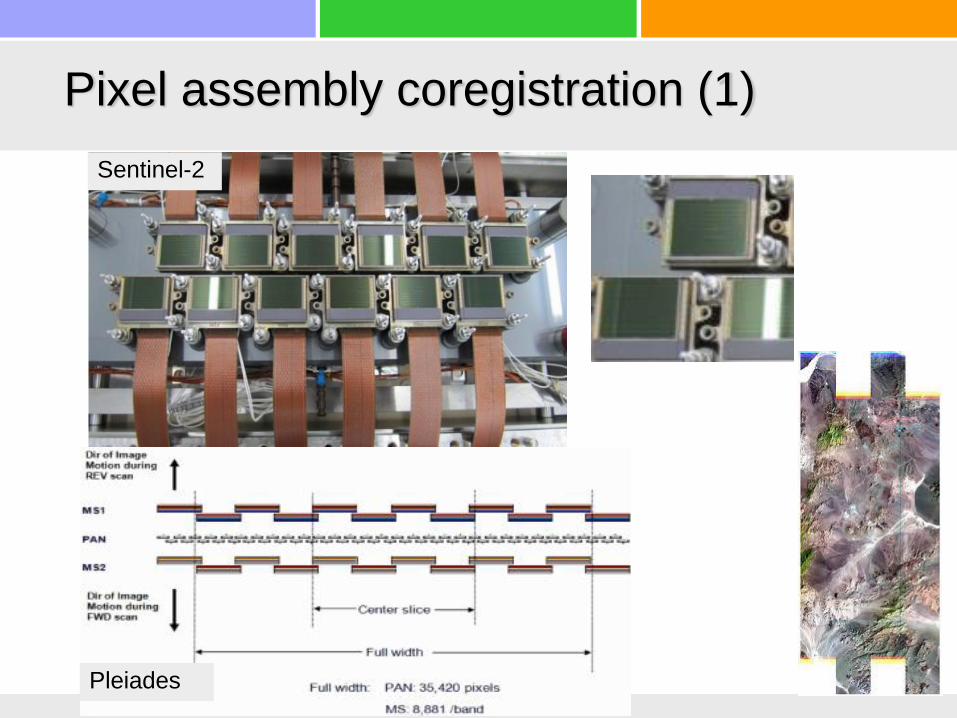
Pixel assembly coregistration (1)
Sentinel-2
Pleiades

Pixel assembly coregistration (2)
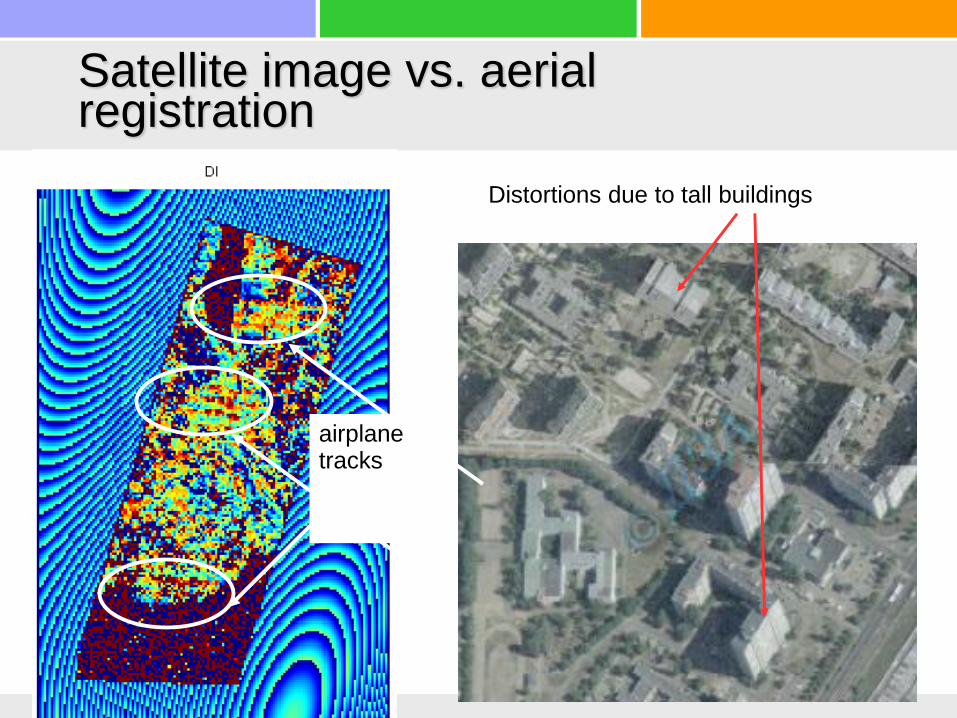
Satellite image vs. aerial registration
airplane tracks
Distortions due to tall buildings

Questions?





























