Embed Size (px)
Citation preview

Adaptive multi-element polynomial chaos with discrete measure: Algorithms and application to
SPDEs Mengdi Zheng and George Karniadakis

Content: 1. computing SPDE by MEPCM 2. motivations 3. numerical integration on discrete measure 4. numerical example on KdV equation 5. future work

1.What computational SPDE is about? (MEPCM)
Xt(!) E[y(x, t;!)]Xt(!)
Xt(⇠1, ⇠2, ...⇠n)
...
⇠n
⇠3⇠2
⇠1
⌦
E[ym(x, t;!)]
E[ym(x, t; ⇠1, ⇠2, ..., ⇠n)]
fix x, t, integration over a finite dimensional sample space
MEPCM=FEM on sample space
⇠1
⇠2
⌦
⇡ ⇡
Gauss quadratures

So it’s all about integration on the sample space...Gauss integration
I =
Z b
ad�(x)f(x) ⇡
Z b
ad�(x)
dX
i=1
f(xi)hi(x)
=dX
i=1
f(xi)
Z b
ad�(x)hi(x)
Generate {P_i(x)} orthogonal to this measure
zeros of P_d(x) Lagrange interpolation on the zeros
dX
i=1
y(x, t; ⇠1,i)wionly run deterministic solver
on quadrature points, no need to run propagator
exactness of integration m=2d-1

2. Three motivations of dealing with discrete measure
Gaussian process Levy
process
Hermite polynomial chaos
Levy-Sheffer polynomial chaos ?
jump
current work
Analysis of historical stock prices shows that simple models with randomness provided by pure jump Levy processes often capture the statistical behavior of observed stock prices better than similar models with randomness provided by a Brownian motion.
Mathematical finance
1
2
3
4
5

3. J. Foo proved this on continuous measure
J. Foo, X. Wan, G. E. Karniadakis, A multi-element probabilistic col- location method for PDEs with parametric uncertainty: error anal- ysis and applications, Journal of Computational Physics 227 (2008), pp. 9572–9595.

3. Can we prove it on discrete measure? for discrete measure
�" =NX
i=1
�i⌘"⌧i ,
lim"!0
⌘"⌧i = �⌧i , lim"!0
�" = �.
�����
Z
�f(x)�(dx)�
NeX
i=1
QBi
m f
����� ����Z
�f(x)�(dx)�
Z
�f(x)�"(dx)
����
+
�����
Z
�f(x)�"(dx)�
NeX
i=1
Q",Bi
m f
����� +
�����
NeX
i=1
Q",Bi
m f �NeX
i=1
QBi
m f
����� ,
h / N�1es N�(m+1)
es
m = 2d� 1N�2d
es
� =NX
i=1
�i�⌧i ⌦⌧1 ⌧2 ⌧3



Generating orthogonal polynomials for discrete measure
Vandermonde matrix method
µk =
Z
Rx
k�(dx)
0
BBBB@
µ0 µ1 . . . µk
µ1 µ2 . . . µk+1
. . . . . . . . . . . .µk�1 µk . . . µ2k�1
0 0 . . . 1
1
CCCCA
0
BBBB@
p0p1. . .pk�1
pk
1
CCCCA=
0
BBBB@
00. . .01
1
CCCCA
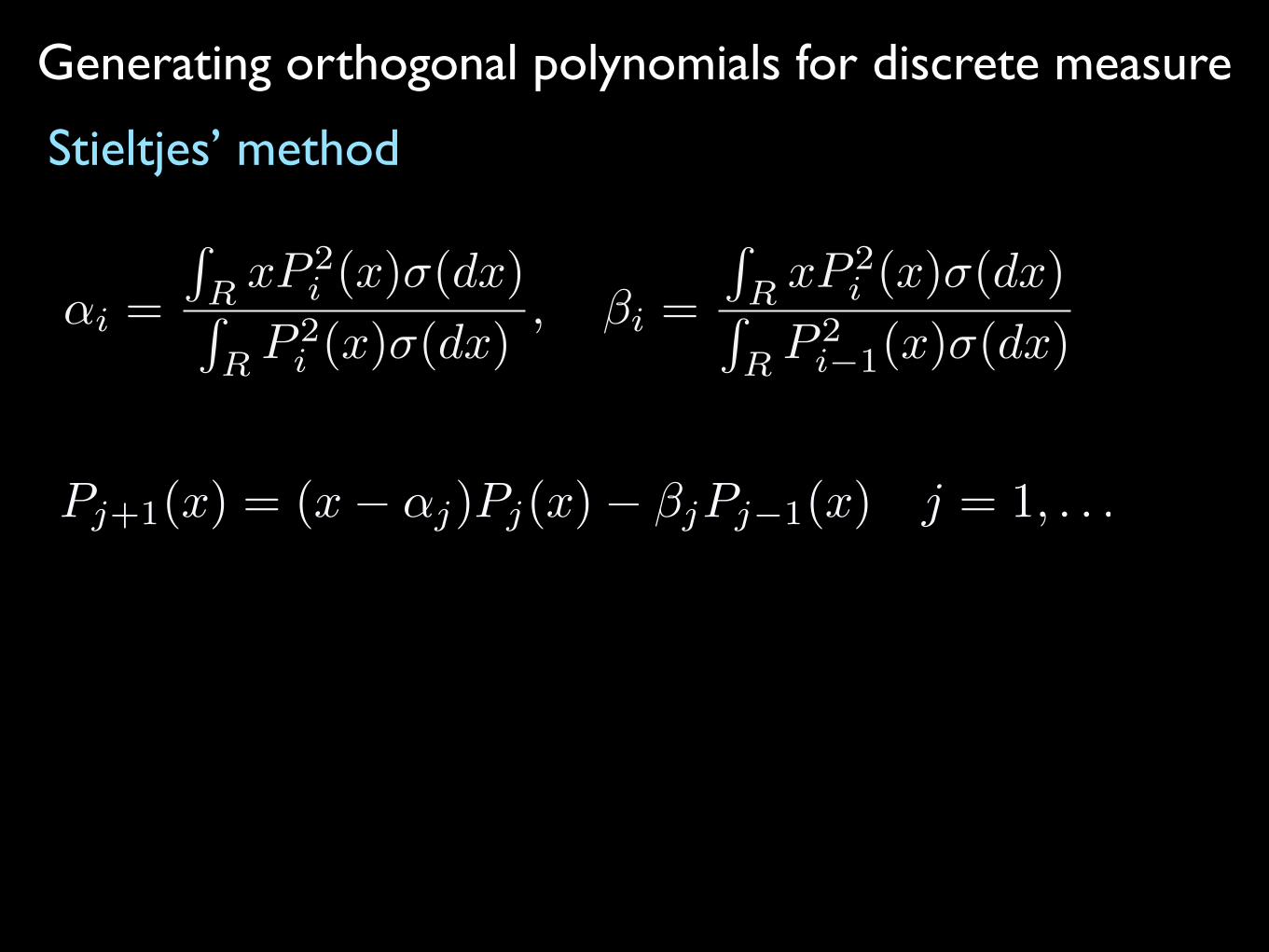
Generating orthogonal polynomials for discrete measure
Stieltjes’ method
↵i =
RR xP
2i (x)�(dx)R
R P
2i (x)�(dx)
, �i =
RR xP
2i (x)�(dx)R
R P
2i�1(x)�(dx)
Pj+1(x) = (x� ↵j)Pj(x)� �jPj�1(x) j = 1, . . .

Generating orthogonal polynomials for discrete measureFischer’s method
� =NX
i=1
�i�⌧i ⌫ = � + ��⌧
↵⌫i = ↵i + �
�2i Pi(⌧)Pi+1(⌧)
1 + �Pi
j=0 �2jP
2j (⌧)
� ��2i�1Pi(⌧)Pi�1(⌧)
1 + �Pi�1
j=0 �2jP
2j (⌧)
�⌫i = �i
[1 + �Pi�2
j=0 �2jP
2j (⌧)][1 + �
Pij=0 �
2jP
2j (⌧)]
[1 + �Pi�1
j=0 �2jP
2j (⌧)]
2

Generating orthogonal polynomials for discrete measure
Modified Chebyshev method
⌫r =
Z
⌦pr(⇠)d�(⇠)
�kl =
Z
⌦Pk(⇠)pl(⇠)d�(⇠)
↵k = ak +�k,k+1
�kk� �k�1,k
�k�1,k�1,�k =
�k,k
�k�1,k�1

Generating orthogonal polynomials for discrete measure
Lanczos’ method0
BBBB@
1pw1
pw2 . . .
pwNp
w1 ⌧1 0 . . . 0pw2 0 ⌧2 . . . 0. . . . . . . . . . . . . . .pwN 0 0 . . . ⌧N
1
CCCCA
0
BBBB@
1p�1 0 . . . 0p
�0 ↵0p�1 . . . 0
0p�1 ↵1 . . . 0
. . . . . . . . . . . . . . .0 0 0 . . . ↵N�1
1
CCCCA
�(x) =NX
i=1
wi�⌧i

QBi
mgenerating orthogonal polynomials w.r.t.
discrete measure

QBi
mgenerating orthogonal polynomials w.r.t.
discrete measure

QBi
mgenerating orthogonal polynomials w.r.t.
discrete measure

3. Numerical integration on discrete measure test theorem on discrete measure by GENZ functions
in 1D

3. Numerical integration on discrete measure
in 1Dtest theorem on discrete measure by GENZ functions

Sparse grid for discrete measure in higher dimensions
A(k +N,N) =X
k+1|i|k+N
(�1)k+N�|i|✓
k +N � 1k +N � |i|
◆(U i1 ⌦ ...⌦ U iN )
‘finite difference method along dimensions’

3. Numerical integration on discrete measure
in 2D by sparse grid
test theorem on discrete measure by GENZ functions

Numerical example on KdV equationu
t
+ 6uux
+ u
xxx
= �⇠, x 2 R
u(x, 0) =a
2sech
2(
pa
2(x� x0))
< u
m(x, T ;!) >=
Z
Rd⇢(⇠)[
a
2sech
2(
pa
2(x� 3�⇠T 2 � x0 � aT )) + �⇠T ]m
L2u1 =
qRdx(E[u
num
(x, T ;!)]� E[uex
(x, T ;!)])2qR
dx(E[uex
(x, T ;!)])2
L2u2 =
qRdx(E[u2
num
(x, T ;!)]� E[u2ex
(x, T ;!)])2qR
dx(E[u2ex
(x, T ;!)])2

p-convergence

h-convergence

MEPCM on an adapted mesh
⇠1
⇠2
⌦
Gauss quadratures
Criterion: divide integration
domain s.t. we minimize the difference in
variance
‘local variance’ criterion

MEPCM on an adapted mesh

2 discrete R.V.s by sparse grid

Discrete R.V. + Continuous R.V. by sparse grid

4 discrete R.V.s by sparse grid

Future work before I graduate1. represent Levy process by independent R.V.s and solve SPDE w/ Levy by MEPCM 2. try LDP on SPDE w/ Levy 3. try Levy-Sheffer system on SPDE w/ Levy 4. application in mathematical finance 5. simulate NS equation with jump processes 6. solve SPDE w/ non-Gaussian processes 7. simulate NS equation with non-Gaussian processes






























