Embed Size (px)
Citation preview

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis in a Cognitive RadioSystem with Cooperative Beamforming
Reference: Karmoose, Mohammed, Ahmed Sultan, and Moustafa Youssef. "Stability analysis in acognitive radio system with cooperative beamforming." Wireless Communications and Networking
Conference (WCNC), 2013 IEEE. IEEE, 2013.
Mohamed Seif1, and Abdelrahman Youssef1
1Wireless Intelligent Networks Center (WINC), Nile University, Egypt
June 22, 2015
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 1

Outline System Model System Analysis Numerical Results Conclusion
Outline
1 Outline
2 System ModelNetwork ModelSensing and Beamforming
3 System AnalysisQueue Service RatesStability Analysis
4 Numerical ResultsNumerical Results
5 ConclusionConclusion
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 2
Outline System Model System Analysis Numerical Results Conclusion
Outline
•System Model
•System Analysis
M. Seif
•Numerical Results
•Conclusions
A. Youssef
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 3

Outline System Model System Analysis Numerical Results Conclusion
Network Model
Network Model
Pair of a SU are communicating inthe presence of 2 PUs, eachequipped with one antenna
K (decode and forward) relays areworking together forming a virtualantenna array (VAA)
Functions of relays:
1 Enhance the throughput of SUnetwork
2 Null the interference on PUnetwork
TX RX
1
2
K
TX RX
Secondary User Network
Primary User Network
Figure: CRN model
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 4
Outline System Model System Analysis Numerical Results Conclusion
Sensing and Beamforming
Sensing and Beamforming
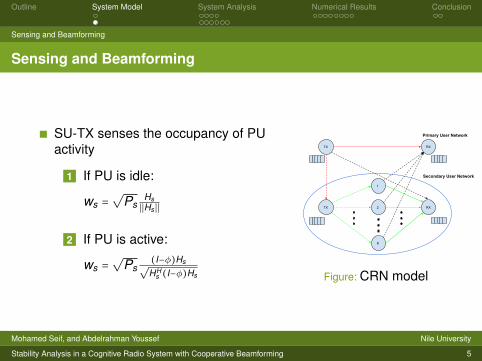
SU-TX senses the occupancy of PUactivity
1 If PU is idle:
ws =√
PsHs∣∣Hs ∣∣
2 If PU is active:
ws =√
Ps(I−φ)Hs
√
HHs (I−φ)Hs
TX RX
1
2
K
TX RX
Secondary User Network
Primary User Network
Figure: CRN model
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 5
Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
A. Primary User Service Rate
1 Secondary user’s queue is empty:pout,p = Pr{Pp ∣Hp ∣
2< βp} = 1 − exp(βp
Pp)
Then, primary service rate is 1 − pout,p
2 Secondary user’s is nonempty and the primary user is detected:This event happens w.p. (1 − pmd)Pr{Qs ≠ 0}Then, primary service rate is 1 − pout,p
3 Secondary user’s queue is nonempty and the primary user ismisdetected:
This event happens w.p. pmdPr{Qs ≠ 0}Then, primary service rate is 1 − pout,pThe relays mistakenly don’t employ the nullingbeamforming vectorpmd
out,p = Pr{ Pp ∣Hp ∣2
∣HHspwa∣+1 < βp}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 6

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
A. Primary User Service Rate
1 Secondary user’s queue is empty:pout,p = Pr{Pp ∣Hp ∣
2< βp} = 1 − exp(βp
Pp)
Then, primary service rate is 1 − pout,p
2 Secondary user’s is nonempty and the primary user is detected:This event happens w.p. (1 − pmd)Pr{Qs ≠ 0}
Then, primary service rate is 1 − pout,p
3 Secondary user’s queue is nonempty and the primary user ismisdetected:
This event happens w.p. pmdPr{Qs ≠ 0}Then, primary service rate is 1 − pout,pThe relays mistakenly don’t employ the nullingbeamforming vectorpmd
out,p = Pr{ Pp ∣Hp ∣2
∣HHspwa∣+1 < βp}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 6

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
A. Primary User Service Rate
1 Secondary user’s queue is empty:pout,p = Pr{Pp ∣Hp ∣
2< βp} = 1 − exp(βp
Pp)
Then, primary service rate is 1 − pout,p
2 Secondary user’s is nonempty and the primary user is detected:This event happens w.p. (1 − pmd)Pr{Qs ≠ 0}Then, primary service rate is 1 − pout,p
3 Secondary user’s queue is nonempty and the primary user ismisdetected:
This event happens w.p. pmdPr{Qs ≠ 0}Then, primary service rate is 1 − pout,pThe relays mistakenly don’t employ the nullingbeamforming vectorpmd
out,p = Pr{ Pp ∣Hp ∣2
∣HHspwa∣+1 < βp}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 6

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
A. Primary User Service Rate
1 Secondary user’s queue is empty:pout,p = Pr{Pp ∣Hp ∣
2< βp} = 1 − exp(βp
Pp)
Then, primary service rate is 1 − pout,p
2 Secondary user’s is nonempty and the primary user is detected:This event happens w.p. (1 − pmd)Pr{Qs ≠ 0}Then, primary service rate is 1 − pout,p
3 Secondary user’s queue is nonempty and the primary user ismisdetected:
This event happens w.p. pmdPr{Qs ≠ 0}Then, primary service rate is 1 − pout,pThe relays mistakenly don’t employ the nullingbeamforming vectorpmd
out,p = Pr{ Pp ∣Hp ∣2
∣HHspwa∣+1 < βp}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 6
Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
A. Primary User Service Rate
The mean service rate for PU is:
µp = (1 − pout,p)(Pr{Qs = 0} + (1 − pmd )Pr{Qs ≠ 0}) + (1 − pmdout,p)(pmd Pr{Qs ≠ 0})
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 7

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
B. Secondary User Service Rate
1 Primary Queue is empty and the secondary user detects thechannel to be vacant:
This case happens w.p. (1 − pfa)Pr{Qp = 0}pout,s = Pr{Ps ∣∣Hs ∣∣
2< βs}
2 Primary queue is empty and the secondary user finds thechannel busy:
This case happens w.p. pfaPr{Qp = 0}
pfaout,s = Pr{∣HH
s wp ∣2< βs}
3 Primary queue is nonempty and the secondary user detectsprimary activity:
This case happens w.p. (1 − pmd )Pr{Qp ≠ 0}
pdout,s = Pr{
∣HHs wp ∣
2
Pp ∣Hps ∣2+1< βs}
4 Primary queue is nonempty and the secondary user misdetectsprimary activity:
This case happens w.p. pmd Pr{Qp ≠ 0}, pdout,s = Pr{ Ps ∣∣Hs ∣∣
2
Pp ∣Hps ∣2+1< βs}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 8
Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
B. Secondary User Service Rate
1 Primary Queue is empty and the secondary user detects thechannel to be vacant:
This case happens w.p. (1 − pfa)Pr{Qp = 0}pout,s = Pr{Ps ∣∣Hs ∣∣
2< βs}
2 Primary queue is empty and the secondary user finds thechannel busy:
This case happens w.p. pfaPr{Qp = 0}
pfaout,s = Pr{∣HH
s wp ∣2< βs}
3 Primary queue is nonempty and the secondary user detectsprimary activity:
This case happens w.p. (1 − pmd )Pr{Qp ≠ 0}
pdout,s = Pr{
∣HHs wp ∣
2
Pp ∣Hps ∣2+1< βs}
4 Primary queue is nonempty and the secondary user misdetectsprimary activity:
This case happens w.p. pmd Pr{Qp ≠ 0}, pdout,s = Pr{ Ps ∣∣Hs ∣∣
2
Pp ∣Hps ∣2+1< βs}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 8

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
B. Secondary User Service Rate
1 Primary Queue is empty and the secondary user detects thechannel to be vacant:
This case happens w.p. (1 − pfa)Pr{Qp = 0}pout,s = Pr{Ps ∣∣Hs ∣∣
2< βs}
2 Primary queue is empty and the secondary user finds thechannel busy:
This case happens w.p. pfaPr{Qp = 0}
pfaout,s = Pr{∣HH
s wp ∣2< βs}
3 Primary queue is nonempty and the secondary user detectsprimary activity:
This case happens w.p. (1 − pmd )Pr{Qp ≠ 0}
pdout,s = Pr{
∣HHs wp ∣
2
Pp ∣Hps ∣2+1< βs}
4 Primary queue is nonempty and the secondary user misdetectsprimary activity:
This case happens w.p. pmd Pr{Qp ≠ 0}, pdout,s = Pr{ Ps ∣∣Hs ∣∣
2
Pp ∣Hps ∣2+1< βs}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 8

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
B. Secondary User Service Rate
1 Primary Queue is empty and the secondary user detects thechannel to be vacant:
This case happens w.p. (1 − pfa)Pr{Qp = 0}pout,s = Pr{Ps ∣∣Hs ∣∣
2< βs}
2 Primary queue is empty and the secondary user finds thechannel busy:
This case happens w.p. pfaPr{Qp = 0}
pfaout,s = Pr{∣HH
s wp ∣2< βs}
3 Primary queue is nonempty and the secondary user detectsprimary activity:
This case happens w.p. (1 − pmd )Pr{Qp ≠ 0}
pdout,s = Pr{
∣HHs wp ∣
2
Pp ∣Hps ∣2+1< βs}
4 Primary queue is nonempty and the secondary user misdetectsprimary activity:
This case happens w.p. pmd Pr{Qp ≠ 0}, pdout,s = Pr{ Ps ∣∣Hs ∣∣
2
Pp ∣Hps ∣2+1< βs}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 8

Outline System Model System Analysis Numerical Results Conclusion
Queue Service Rates
B. Secondary User Service Rate
The mean service rate for SU is:
(pout,s(1 − pfa) + pfaout,spfa)Pr{Qp = 0} + (Pd
out,s(1 − pmd ) + pmdout,spmd )Pr{Qp ≠ 0}
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 9

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
Stability Analysis
Our main objective is to characterizethe stability region defined as theset of arival pairs (λp, λs)
Since Qp and Qs are interactingtogheter and their direct analysis isitractable
The concept of dominant systems
TX RX
1
2
K
TX RX
Secondary User Network
Primary User Network
Figure: CRN model
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 10

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
Stability Analysis
In a multiqueue system, the system is stable when all queuesare stable. We can apply Loynes’theorem to check the stability
TheoremIf the arrival process and the service process of a queue are strictlystationary, and the mean service rate is greater than the mean arrivalrate of the queue, then the queue is stable, otherwise it is unstable.
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 11

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
Stability Analysis
In a multiqueue system, the system is stable when all queuesare stable. We can apply Loynes’theorem to check the stability
TheoremIf the arrival process and the service process of a queue are strictlystationary, and the mean service rate is greater than the mean arrivalrate of the queue, then the queue is stable, otherwise it is unstable.
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 11

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
Stability Analysis using Dominant Systems
In order to analyze the interacting queues, we employ theconcept of dominant systems.
In a dominant system a user transmits dummy packets if itsqueue is empty
Since, we have two users, we can construct two dominantsystems
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 12
Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
Stability Analysis using Dominant Systems
In order to analyze the interacting queues, we employ theconcept of dominant systems.
In a dominant system a user transmits dummy packets if itsqueue is empty
Since, we have two users, we can construct two dominantsystems
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 12

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
Stability Analysis using Dominant Systems
In order to analyze the interacting queues, we employ theconcept of dominant systems.
In a dominant system a user transmits dummy packets if itsqueue is empty
Since, we have two users, we can construct two dominantsystems
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 12

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The primary transmitter sends dummy packets when its queue isempty
Whereas, the secondart transmitter behaves as it would in theoriginal system
Pr{Qp = 0} = 0
µpds = (pd
out,s(1 − pmd) + pmdout,spmd)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 13

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The primary transmitter sends dummy packets when its queue isempty
Whereas, the secondart transmitter behaves as it would in theoriginal system
Pr{Qp = 0} = 0
µpds = (pd
out,s(1 − pmd) + pmdout,spmd)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 13

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The primary transmitter sends dummy packets when its queue isempty
Whereas, the secondart transmitter behaves as it would in theoriginal system
Pr{Qp = 0} = 0
µpds = (pd
out,s(1 − pmd) + pmdout,spmd)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 13

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The primary transmitter sends dummy packets when its queue isempty
Whereas, the secondary transmitter behaves as it would in theoriginal system
Pr{Qs = 0} = 1 − λs
µpds
µpdp = (1 − pout,p) −
λs
µpds
pmd(pmdout,p − pout,p)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 14

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The stability region on the first dominant system is given by theclosure of the rate pairs (λp, λs)
max λp = µpdp s.t. λs < µ
pds ,Ps ≤ Pmax
Same manner for the second dominant system ,
Stability region of the original system is the union of the twodominant system (Theorem)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 15

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The stability region on the first dominant system is given by theclosure of the rate pairs (λp, λs)
max λp = µpdp s.t. λs < µ
pds ,Ps ≤ Pmax
Same manner for the second dominant system ,
Stability region of the original system is the union of the twodominant system (Theorem)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 15

Outline System Model System Analysis Numerical Results Conclusion
Stability Analysis
I. First dominant system
The stability region on the first dominant system is given by theclosure of the rate pairs (λp, λs)
max λp = µpdp s.t. λs < µ
pds ,Ps ≤ Pmax
Same manner for the second dominant system ,
Stability region of the original system is the union of the twodominant system (Theorem)
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 15
Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
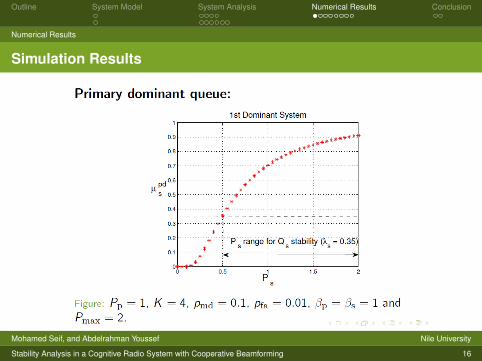
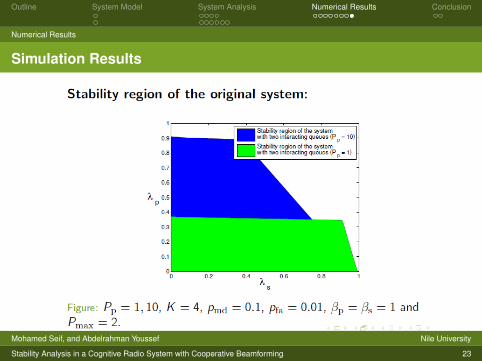
Simulation Results
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 16

Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
Simulation Results
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 17

Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
Simulation Results
Figure: Optimal secondary transmit power versus λs for the firstdominant system
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 18

Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
Simulation Results
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 19

Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
Simulation Results
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 20
Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
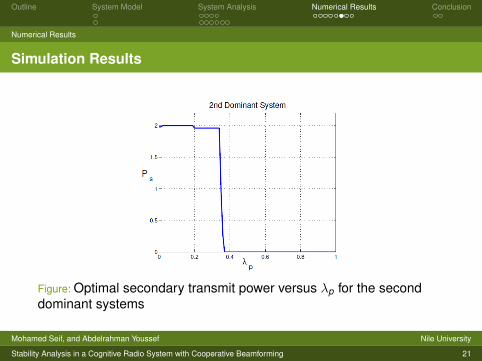
Simulation Results
Figure: Optimal secondary transmit power versus λp for the seconddominant systems
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 21

Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
Simulation Results
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 22
Outline System Model System Analysis Numerical Results Conclusion
Numerical Results
Simulation Results
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 23

Outline System Model System Analysis Numerical Results Conclusion
Conclusion
Conclusion
A CRN is considered which consists of a single primary and asingle secondary links.
The secondary transmitter utilizes a set of dedicated relays byapplying beamforming techniques to null out secondarytransmission at the primary receiver
Studying the stability region of the queues with sensing errortaken into account
We resorted to the concept of dominant systems in order todecouple the interacting queues
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 24

Outline System Model System Analysis Numerical Results Conclusion
Conclusion
Conclusion
A CRN is considered which consists of a single primary and asingle secondary links.
The secondary transmitter utilizes a set of dedicated relays byapplying beamforming techniques to null out secondarytransmission at the primary receiver
Studying the stability region of the queues with sensing errortaken into account
We resorted to the concept of dominant systems in order todecouple the interacting queues
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 24

Outline System Model System Analysis Numerical Results Conclusion
Conclusion
Conclusion
A CRN is considered which consists of a single primary and asingle secondary links.
The secondary transmitter utilizes a set of dedicated relays byapplying beamforming techniques to null out secondarytransmission at the primary receiver
Studying the stability region of the queues with sensing errortaken into account
We resorted to the concept of dominant systems in order todecouple the interacting queues
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 24
Outline System Model System Analysis Numerical Results Conclusion
Conclusion
Conclusion
A CRN is considered which consists of a single primary and asingle secondary links.
The secondary transmitter utilizes a set of dedicated relays byapplying beamforming techniques to null out secondarytransmission at the primary receiver
Studying the stability region of the queues with sensing errortaken into account
We resorted to the concept of dominant systems in order todecouple the interacting queues
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 24

Outline System Model System Analysis Numerical Results Conclusion
Conclusion
Thank You!
Mohamed Seif, and Abdelrahman Youssef Nile University
Stability Analysis in a Cognitive Radio System with Cooperative Beamforming 25




























