Embed Size (px)
Citation preview

INTRODUCCIOacuteN
En ingenieriacutea torsioacuten es la solicitacioacuten que se presenta cuando se aplica un
momento sobre el eje longitudinal de un elemento constructivo o prisma mecaacutenico
como pueden ser ejes o en general elementos donde una dimensioacuten predomina
sobre las otras dos aunque es posible encontrarla en situaciones diversas
La torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje
de la pieza deja de estar contenida en el plano formado inicialmente por las dos
curvas En lugar de eso una curva paralela al eje se retuerce alrededor de eacutel
El estudio general de la torsioacuten es complicado porque bajo ese tipo de solicitacioacuten
la seccioacuten transversal de una pieza en general se caracteriza por dos fenoacutemenos
Aparecen tensiones tangenciales paralelas a la seccioacuten transversal
Cuando las tensiones anteriores no estaacuten distribuidas adecuadamente cosa que
sucede siempre a menos que la seccioacuten tenga simetriacutea circular aparecen alabeos
seccionales que hacen que las secciones transversales deformadas no sean
planas
En antildeos anteriores con el disentildeo elaacutestico se teniacutean secciones de mayor dimensioacuten
que se obtiene con el disentildeo actual por rotura en consecuencia el efecto del
momento torsor era considerado como secundario debido a que se teniacutea un factor
de seguridad alto pero actualmente ya con el nuevo disentildeo debemos tener en
cuenta para el disentildeo este momento torsor En las estructuras se presentan dos
tipos de torsioacuten uno es el torsioacuten de equilibrio en el cual se tiene que realizar el
disentildeo para el monto torsor que se ha obtenido por equilibrio estaacutetico y el otro es
la torsioacuten de compatibilidad el disentildeo se realiza con un momento torsor minorado
debido a que se permite la redistribucioacuten de los momentos en los apoyos maacutes
cercanos al elemento La torsioacuten por compatibilidad es la que se presenta con
mayor frecuencia en las estructuras
1
ESFUERZO DE TORSIOacuteN
1 Concepto
La torsioacuten se refiere a un desplazamiento circular de una determinada seccioacuten
transversal de un elemento cuando se aplica sobre este un momento torsor
alrededor del eje La torsioacuten se puede medir observando la deformacioacuten que
produce en un objeto determinado Por ejemplo se fija un objeto ciliacutendrico de
longitud determinada por un extremo y se aplica un par de fuerzas al otro
extremo la cantidad de vueltas que de un extremo con respecto al otro es una
medida de torsioacuten Los materiales empleados en ingenieriacutea para elaborar
elementos de maacutequinas rotatorias como los arbole de motor deben resistir las
tensiones de torsioacuten que les aplican las cargas que mueven
2 Torsioacuten en eje de seccioacuten circular
El primer caso y el maacutes simple a considerar corresponde a un eje de seccioacuten
Circular en donde en un extremo se aplica un momento puro y en el otro se
asume al eje empotrado en un muro riacutegido como el que se muestra en la Figura1
En un problema de esta naturaleza al momento puro lo llamaremos torque y en
general se denotara como T
Figura1
En la Figura 1 tenemos un sistema de coordenadas Cartesiano imaginemos que
antes de ser deformado por T se marca un punto A en el contorno No es dificil ver
que cuando se aplica T y el cilindro se deforma el punto A se moveraacute hacia arriba
2
lsquogirandorsquo pegado a la superficie del cilindro o hasta el punto Aprime como se puede ver
en la misma figura
Imaginemos que se dibujan dos liacuteneas rectas en el cilindro antes de ser
deformado La primera liacutenea va desde el centro del cilindro al punto A y la segunda
liacutenea es horizontal va desde el muro al punto A Ahora vamos a discutir en detalle
las simplificaciones que haremos para modelar la deformacioacuten de este eje
Primero que todo vamos a asumir que las liacuteneas rectas mencionadas
anteriormente permanecen rectas cuando el cilindro se deforma Esta es una
aproximacioacuten razonable si la deformacioacuten se asume lsquopequentildearsquo
Como las liacuteneas se asumen rectas cuando se deforma el eje se pueden definir
dos aacutengulos θ y α
Imaginemos que se dibujan dos cortes imaginarios en el eje tal como se muestra
en la Figura 2 Antes de ser deformado se dibujan dos puntos A y B en una liacutenea
horizontal Vamos a asumir que al ser deformado el eje estas dos secciones
circulares (y cualquier otra seccioacuten) mantienen la forma circular y no solo eso
vamos a asumir que el diaacutemetro no cambia de forma significativa y que por tanto
la deformacioacuten se puede ver como dos discos riacutegidos (muy delgados en la
direccioacuten z) rotando uno respecto al otro luego la deformacioacuten total del eje se
podriacutea considerar como pequentildeos lsquogirosrsquo relativos de una cantidad infinita de
discos riacutegidos de espesor muy pequentildeo
Figura 2
De manera adicional se asumiraacute ademaacutes que los planos en donde se ubican A y
B que originalmente son paralelos seguiriacutean siendo paralelos al momento de
3
producirse la deformacioacuten Teniendo presente los supuestos anteriores
consideremos ahora la Figura 3 En esta figura dibujamos nuevamente las dos
liacuteneas que definen los aacutengulos θ y α y procedemos ahora a dibujar en el manto
del eje un cuadrado diferencial muy pequentildeo como se muestra en la misma figura
Figura 3
Teniendo presente los supuestos respecto a la forma como se deforman dos planos paralelos no es difiacutecil apreciar que la forma final del cuadrado diferencial seriacutea como se muestran en la Figura 43 En la Figura 44 tenemos una vista frontal ampliada del cuadrado diferencial antes de deformarse ABCD y cuando se ha deformado AprimeBprimeCprimeDprime Lo que vemos en esta figura y en la figura anterior es que los acuteaacutengulos interiores del cuadrado cambian su magnitud y por tanto lo que estamos presenciando es en particular una deformacioacuten en corte para el cuadrado diferencial
Figura 4
De las Figuras 4 Se tiene que τ=Gα De la Figura 1 vemos que el arco determinado con θ seriacutea rθ con r un radio arbitrario 0 le r le D2 Si α es pequentildeo el mismo arco se puede calcular aproximadamente como Lα de modo que
4
rθ=Lα
Y podemos ver que si r rarr 0 entonces α rarr 0 de modo que la mayor deformacioacuten en corte se produciriacutea en el manto o la parte exterior del eje para r = D2 De la expresioacuten anterior se tiene
prop= rθL
τ=GθL
r helliphelliphelliphellip (1)
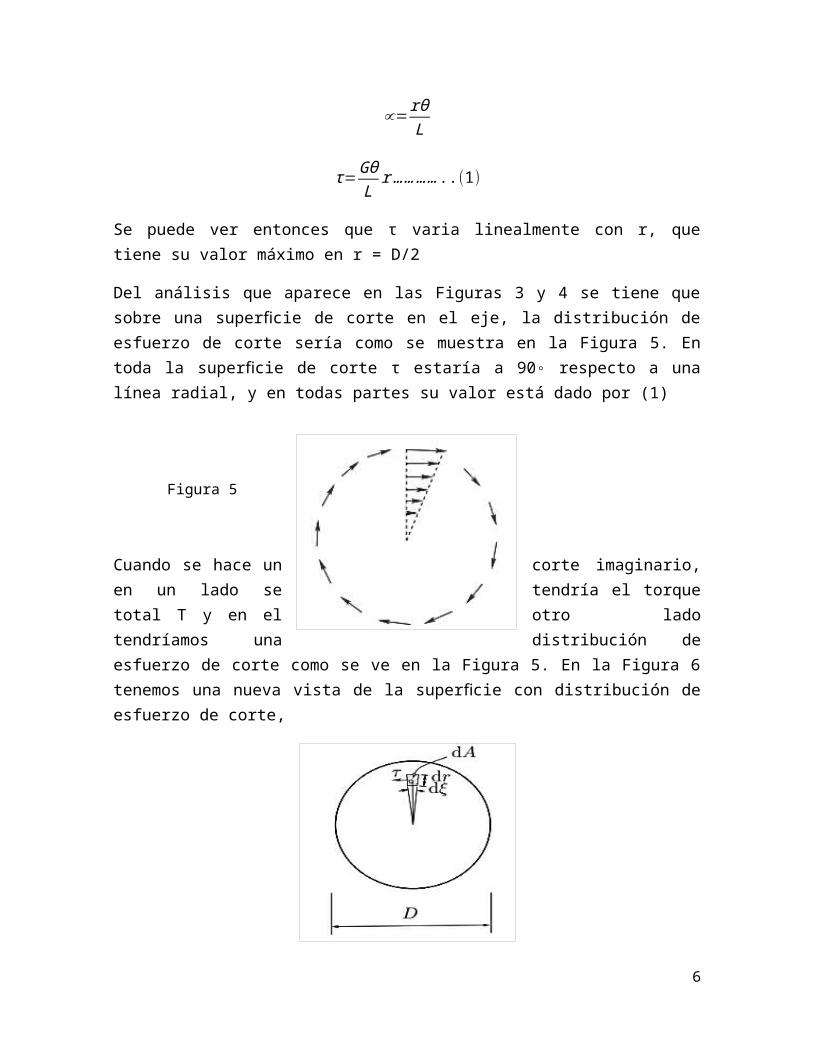
Se puede ver entonces que τ varia linealmente con r que tiene su valor maacuteximo en r = D2
Del anaacutelisis que aparece en las Figuras 3 y 4 se tiene que sobre una superficie de corte en el eje la distribucioacuten de esfuerzo de corte seriacutea como se muestra en la Figura 5 En toda la superficie de corte τ estariacutea a 90 respecto a una liacutenea radial y en todas partes su valor estaacute dado por (1)
Figura 5
Cuando se hace un corte imaginario en un lado se tendriacutea el torque total T y en el otro lado tendriacuteamos una distribucioacuten de esfuerzo de corte como se ve en la Figura 5 En la Figura 6 tenemos una nueva vista de la superficie con distribucioacuten de esfuerzo de corte
5
En particular hemos dibujado uno de esos esfuerzos sobre un elemento diferencial de aacuterea Para la parte del cilindro extra lsquoida con el corte debe haber equilibrio de modo que si la fuerza por τ es τ dA y el torque respecto al centro por tanto es rτ dA entonces
T=intrτ dA
T=GθL
π D4
32
Se define el momento polar de inercia J como
J= π D4
32
T=GθL
J
El esfuerzo de corte maacuteximo en r = D2 seriacutea igual a
τmax=TD2J
6
Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17
ESFUERZO DE TORSIOacuteN
1 Concepto
La torsioacuten se refiere a un desplazamiento circular de una determinada seccioacuten
transversal de un elemento cuando se aplica sobre este un momento torsor
alrededor del eje La torsioacuten se puede medir observando la deformacioacuten que
produce en un objeto determinado Por ejemplo se fija un objeto ciliacutendrico de
longitud determinada por un extremo y se aplica un par de fuerzas al otro
extremo la cantidad de vueltas que de un extremo con respecto al otro es una
medida de torsioacuten Los materiales empleados en ingenieriacutea para elaborar
elementos de maacutequinas rotatorias como los arbole de motor deben resistir las
tensiones de torsioacuten que les aplican las cargas que mueven
2 Torsioacuten en eje de seccioacuten circular
El primer caso y el maacutes simple a considerar corresponde a un eje de seccioacuten
Circular en donde en un extremo se aplica un momento puro y en el otro se
asume al eje empotrado en un muro riacutegido como el que se muestra en la Figura1
En un problema de esta naturaleza al momento puro lo llamaremos torque y en
general se denotara como T
Figura1
En la Figura 1 tenemos un sistema de coordenadas Cartesiano imaginemos que
antes de ser deformado por T se marca un punto A en el contorno No es dificil ver
que cuando se aplica T y el cilindro se deforma el punto A se moveraacute hacia arriba
2
lsquogirandorsquo pegado a la superficie del cilindro o hasta el punto Aprime como se puede ver
en la misma figura
Imaginemos que se dibujan dos liacuteneas rectas en el cilindro antes de ser
deformado La primera liacutenea va desde el centro del cilindro al punto A y la segunda
liacutenea es horizontal va desde el muro al punto A Ahora vamos a discutir en detalle
las simplificaciones que haremos para modelar la deformacioacuten de este eje
Primero que todo vamos a asumir que las liacuteneas rectas mencionadas
anteriormente permanecen rectas cuando el cilindro se deforma Esta es una
aproximacioacuten razonable si la deformacioacuten se asume lsquopequentildearsquo
Como las liacuteneas se asumen rectas cuando se deforma el eje se pueden definir
dos aacutengulos θ y α
Imaginemos que se dibujan dos cortes imaginarios en el eje tal como se muestra
en la Figura 2 Antes de ser deformado se dibujan dos puntos A y B en una liacutenea
horizontal Vamos a asumir que al ser deformado el eje estas dos secciones
circulares (y cualquier otra seccioacuten) mantienen la forma circular y no solo eso
vamos a asumir que el diaacutemetro no cambia de forma significativa y que por tanto
la deformacioacuten se puede ver como dos discos riacutegidos (muy delgados en la
direccioacuten z) rotando uno respecto al otro luego la deformacioacuten total del eje se
podriacutea considerar como pequentildeos lsquogirosrsquo relativos de una cantidad infinita de
discos riacutegidos de espesor muy pequentildeo
Figura 2
De manera adicional se asumiraacute ademaacutes que los planos en donde se ubican A y
B que originalmente son paralelos seguiriacutean siendo paralelos al momento de
3
producirse la deformacioacuten Teniendo presente los supuestos anteriores
consideremos ahora la Figura 3 En esta figura dibujamos nuevamente las dos
liacuteneas que definen los aacutengulos θ y α y procedemos ahora a dibujar en el manto
del eje un cuadrado diferencial muy pequentildeo como se muestra en la misma figura
Figura 3
Teniendo presente los supuestos respecto a la forma como se deforman dos planos paralelos no es difiacutecil apreciar que la forma final del cuadrado diferencial seriacutea como se muestran en la Figura 43 En la Figura 44 tenemos una vista frontal ampliada del cuadrado diferencial antes de deformarse ABCD y cuando se ha deformado AprimeBprimeCprimeDprime Lo que vemos en esta figura y en la figura anterior es que los acuteaacutengulos interiores del cuadrado cambian su magnitud y por tanto lo que estamos presenciando es en particular una deformacioacuten en corte para el cuadrado diferencial
Figura 4
De las Figuras 4 Se tiene que τ=Gα De la Figura 1 vemos que el arco determinado con θ seriacutea rθ con r un radio arbitrario 0 le r le D2 Si α es pequentildeo el mismo arco se puede calcular aproximadamente como Lα de modo que
4
rθ=Lα
Y podemos ver que si r rarr 0 entonces α rarr 0 de modo que la mayor deformacioacuten en corte se produciriacutea en el manto o la parte exterior del eje para r = D2 De la expresioacuten anterior se tiene
prop= rθL
τ=GθL
r helliphelliphelliphellip (1)
Se puede ver entonces que τ varia linealmente con r que tiene su valor maacuteximo en r = D2
Del anaacutelisis que aparece en las Figuras 3 y 4 se tiene que sobre una superficie de corte en el eje la distribucioacuten de esfuerzo de corte seriacutea como se muestra en la Figura 5 En toda la superficie de corte τ estariacutea a 90 respecto a una liacutenea radial y en todas partes su valor estaacute dado por (1)
Figura 5
Cuando se hace un corte imaginario en un lado se tendriacutea el torque total T y en el otro lado tendriacuteamos una distribucioacuten de esfuerzo de corte como se ve en la Figura 5 En la Figura 6 tenemos una nueva vista de la superficie con distribucioacuten de esfuerzo de corte
5
En particular hemos dibujado uno de esos esfuerzos sobre un elemento diferencial de aacuterea Para la parte del cilindro extra lsquoida con el corte debe haber equilibrio de modo que si la fuerza por τ es τ dA y el torque respecto al centro por tanto es rτ dA entonces
T=intrτ dA
T=GθL
π D4
32
Se define el momento polar de inercia J como
J= π D4
32
T=GθL
J
El esfuerzo de corte maacuteximo en r = D2 seriacutea igual a
τmax=TD2J
6
Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

lsquogirandorsquo pegado a la superficie del cilindro o hasta el punto Aprime como se puede ver
en la misma figura
Imaginemos que se dibujan dos liacuteneas rectas en el cilindro antes de ser
deformado La primera liacutenea va desde el centro del cilindro al punto A y la segunda
liacutenea es horizontal va desde el muro al punto A Ahora vamos a discutir en detalle
las simplificaciones que haremos para modelar la deformacioacuten de este eje
Primero que todo vamos a asumir que las liacuteneas rectas mencionadas
anteriormente permanecen rectas cuando el cilindro se deforma Esta es una
aproximacioacuten razonable si la deformacioacuten se asume lsquopequentildearsquo
Como las liacuteneas se asumen rectas cuando se deforma el eje se pueden definir
dos aacutengulos θ y α
Imaginemos que se dibujan dos cortes imaginarios en el eje tal como se muestra
en la Figura 2 Antes de ser deformado se dibujan dos puntos A y B en una liacutenea
horizontal Vamos a asumir que al ser deformado el eje estas dos secciones
circulares (y cualquier otra seccioacuten) mantienen la forma circular y no solo eso
vamos a asumir que el diaacutemetro no cambia de forma significativa y que por tanto
la deformacioacuten se puede ver como dos discos riacutegidos (muy delgados en la
direccioacuten z) rotando uno respecto al otro luego la deformacioacuten total del eje se
podriacutea considerar como pequentildeos lsquogirosrsquo relativos de una cantidad infinita de
discos riacutegidos de espesor muy pequentildeo
Figura 2
De manera adicional se asumiraacute ademaacutes que los planos en donde se ubican A y
B que originalmente son paralelos seguiriacutean siendo paralelos al momento de
3
producirse la deformacioacuten Teniendo presente los supuestos anteriores
consideremos ahora la Figura 3 En esta figura dibujamos nuevamente las dos
liacuteneas que definen los aacutengulos θ y α y procedemos ahora a dibujar en el manto
del eje un cuadrado diferencial muy pequentildeo como se muestra en la misma figura
Figura 3
Teniendo presente los supuestos respecto a la forma como se deforman dos planos paralelos no es difiacutecil apreciar que la forma final del cuadrado diferencial seriacutea como se muestran en la Figura 43 En la Figura 44 tenemos una vista frontal ampliada del cuadrado diferencial antes de deformarse ABCD y cuando se ha deformado AprimeBprimeCprimeDprime Lo que vemos en esta figura y en la figura anterior es que los acuteaacutengulos interiores del cuadrado cambian su magnitud y por tanto lo que estamos presenciando es en particular una deformacioacuten en corte para el cuadrado diferencial
Figura 4
De las Figuras 4 Se tiene que τ=Gα De la Figura 1 vemos que el arco determinado con θ seriacutea rθ con r un radio arbitrario 0 le r le D2 Si α es pequentildeo el mismo arco se puede calcular aproximadamente como Lα de modo que
4
rθ=Lα
Y podemos ver que si r rarr 0 entonces α rarr 0 de modo que la mayor deformacioacuten en corte se produciriacutea en el manto o la parte exterior del eje para r = D2 De la expresioacuten anterior se tiene
prop= rθL
τ=GθL
r helliphelliphelliphellip (1)
Se puede ver entonces que τ varia linealmente con r que tiene su valor maacuteximo en r = D2
Del anaacutelisis que aparece en las Figuras 3 y 4 se tiene que sobre una superficie de corte en el eje la distribucioacuten de esfuerzo de corte seriacutea como se muestra en la Figura 5 En toda la superficie de corte τ estariacutea a 90 respecto a una liacutenea radial y en todas partes su valor estaacute dado por (1)
Figura 5
Cuando se hace un corte imaginario en un lado se tendriacutea el torque total T y en el otro lado tendriacuteamos una distribucioacuten de esfuerzo de corte como se ve en la Figura 5 En la Figura 6 tenemos una nueva vista de la superficie con distribucioacuten de esfuerzo de corte
5
En particular hemos dibujado uno de esos esfuerzos sobre un elemento diferencial de aacuterea Para la parte del cilindro extra lsquoida con el corte debe haber equilibrio de modo que si la fuerza por τ es τ dA y el torque respecto al centro por tanto es rτ dA entonces
T=intrτ dA
T=GθL
π D4
32
Se define el momento polar de inercia J como
J= π D4
32
T=GθL
J
El esfuerzo de corte maacuteximo en r = D2 seriacutea igual a
τmax=TD2J
6
Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

producirse la deformacioacuten Teniendo presente los supuestos anteriores
consideremos ahora la Figura 3 En esta figura dibujamos nuevamente las dos
liacuteneas que definen los aacutengulos θ y α y procedemos ahora a dibujar en el manto
del eje un cuadrado diferencial muy pequentildeo como se muestra en la misma figura
Figura 3
Teniendo presente los supuestos respecto a la forma como se deforman dos planos paralelos no es difiacutecil apreciar que la forma final del cuadrado diferencial seriacutea como se muestran en la Figura 43 En la Figura 44 tenemos una vista frontal ampliada del cuadrado diferencial antes de deformarse ABCD y cuando se ha deformado AprimeBprimeCprimeDprime Lo que vemos en esta figura y en la figura anterior es que los acuteaacutengulos interiores del cuadrado cambian su magnitud y por tanto lo que estamos presenciando es en particular una deformacioacuten en corte para el cuadrado diferencial
Figura 4
De las Figuras 4 Se tiene que τ=Gα De la Figura 1 vemos que el arco determinado con θ seriacutea rθ con r un radio arbitrario 0 le r le D2 Si α es pequentildeo el mismo arco se puede calcular aproximadamente como Lα de modo que
4
rθ=Lα
Y podemos ver que si r rarr 0 entonces α rarr 0 de modo que la mayor deformacioacuten en corte se produciriacutea en el manto o la parte exterior del eje para r = D2 De la expresioacuten anterior se tiene
prop= rθL
τ=GθL
r helliphelliphelliphellip (1)
Se puede ver entonces que τ varia linealmente con r que tiene su valor maacuteximo en r = D2
Del anaacutelisis que aparece en las Figuras 3 y 4 se tiene que sobre una superficie de corte en el eje la distribucioacuten de esfuerzo de corte seriacutea como se muestra en la Figura 5 En toda la superficie de corte τ estariacutea a 90 respecto a una liacutenea radial y en todas partes su valor estaacute dado por (1)
Figura 5
Cuando se hace un corte imaginario en un lado se tendriacutea el torque total T y en el otro lado tendriacuteamos una distribucioacuten de esfuerzo de corte como se ve en la Figura 5 En la Figura 6 tenemos una nueva vista de la superficie con distribucioacuten de esfuerzo de corte
5
En particular hemos dibujado uno de esos esfuerzos sobre un elemento diferencial de aacuterea Para la parte del cilindro extra lsquoida con el corte debe haber equilibrio de modo que si la fuerza por τ es τ dA y el torque respecto al centro por tanto es rτ dA entonces
T=intrτ dA
T=GθL
π D4
32
Se define el momento polar de inercia J como
J= π D4
32
T=GθL
J
El esfuerzo de corte maacuteximo en r = D2 seriacutea igual a
τmax=TD2J
6
Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

rθ=Lα
Y podemos ver que si r rarr 0 entonces α rarr 0 de modo que la mayor deformacioacuten en corte se produciriacutea en el manto o la parte exterior del eje para r = D2 De la expresioacuten anterior se tiene
prop= rθL
τ=GθL
r helliphelliphelliphellip (1)
Se puede ver entonces que τ varia linealmente con r que tiene su valor maacuteximo en r = D2
Del anaacutelisis que aparece en las Figuras 3 y 4 se tiene que sobre una superficie de corte en el eje la distribucioacuten de esfuerzo de corte seriacutea como se muestra en la Figura 5 En toda la superficie de corte τ estariacutea a 90 respecto a una liacutenea radial y en todas partes su valor estaacute dado por (1)
Figura 5
Cuando se hace un corte imaginario en un lado se tendriacutea el torque total T y en el otro lado tendriacuteamos una distribucioacuten de esfuerzo de corte como se ve en la Figura 5 En la Figura 6 tenemos una nueva vista de la superficie con distribucioacuten de esfuerzo de corte
5
En particular hemos dibujado uno de esos esfuerzos sobre un elemento diferencial de aacuterea Para la parte del cilindro extra lsquoida con el corte debe haber equilibrio de modo que si la fuerza por τ es τ dA y el torque respecto al centro por tanto es rτ dA entonces
T=intrτ dA
T=GθL
π D4
32
Se define el momento polar de inercia J como
J= π D4
32
T=GθL
J
El esfuerzo de corte maacuteximo en r = D2 seriacutea igual a
τmax=TD2J
6
Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17
En particular hemos dibujado uno de esos esfuerzos sobre un elemento diferencial de aacuterea Para la parte del cilindro extra lsquoida con el corte debe haber equilibrio de modo que si la fuerza por τ es τ dA y el torque respecto al centro por tanto es rτ dA entonces
T=intrτ dA
T=GθL
π D4
32
Se define el momento polar de inercia J como
J= π D4
32
T=GθL
J
El esfuerzo de corte maacuteximo en r = D2 seriacutea igual a
τmax=TD2J
6
Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

Hay dos sub casos especiales para el caso del eje de seccioacuten circular que tratamos ahora En el primero consideramos el caso adicional en que se estaacute trabajando con un tubo de diaacutemetros D1 (interior) y D2 (exterior) tal como se muestra en la Figura 7
Figura 7
Es faacutecil ver que en este caso el anaacutelisis anterior es casi el mismo lo uacutenico que cambiariacutea seriacutea
J= π4
(D24minusD1
4)
Otro caso distinto corresponde a dos ejes conceacutentricos hechos de materiales distintos como se ilustra en la Figura 48 En esta figura se tiene un eje 1 de seccioacuten circular de material con constante G1 y de diaacutemetro D1Perfectamente pegado a el tenemos un eje tubular de diaacutemetro interior D1 y diaacutemetro exterior D2 con constante G2
Figura 8
Sin embargo de la Figura 48 y de la Figura 43 vemos que el tipo de esfuerzos τ que se generan si se dibujan sobre cubos diferenciales al acercarnos a la interface entre 1 y 2 pueden perfectamente mostrar discontinuidades pues
7
apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

apareceriacutean en los costados de los cubos no en la posible cara en la interface La consecuencia de las observaciones anteriores es que en analogiacutea tendriacuteamos
T=2GθL
(int0
D2
G1r3dr+int
0
D2
G2 r3 dr )
T=2GθL
(G 1 D1
4
64+
G2
64(D2
4minusD14))
3 Torsioacuten en eje de seccioacuten rectangular
En el caso de un eje de seccioacuten rectangular de lados a b con b le a las siguientes expresiones son validas
T=GθL
J τ= T
k1 ab2 J=k2 ab3
Donde κ1 y κ2 son constantes que se pueden obtener de la Tabla 1El valor maacuteximo para el esfuerzo de corte el que se produciriacutea en la mitad de la superficie con menor espesor tal como se muestra en la Figura 9
Figura 9
4 Torsioacuten en eje de seccioacuten delgada abierta
8
Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

Nos interesa estudiar el caso de vigas o ejes con secciones de pared delgada y lsquoabiertarsquo en donde en la Figura 10 tenemos algunos ejemplos de dichas secciones o perfiles
Figura 10
Vamos a plantear la teoriacutea para este tipo de problemas basados en un ejemplo especıfico que se muestra en la Figura 411 En dicha figura tenemos un perfil cuya seccioacuten la hemos dividido en tres partes Cada una de estas partes es un rectaacutengulo donde vamos a asumir que bi ≪ ai y por tanto de la Tabla 41 tenemos κ1 = 13 y κ2 = 13 El siguiente supuesto es importante vamos a asumir que el aacutengulo θ de torsioacuten es el mismo para 1 2 y 3 La justificacioacuten seriacutea que al rotar por la deformacioacuten la seccioacuten completa el aacutengulo de torsioacuten deberiacutea ser el mismo pues de otra forma la seccioacuten se separariacutea
Figura 11
Otra observacioacuten importante
El torque total T deberaacute ser igual a la suma de las torques causadas en cada uno de los rectaacutengulos en los que hemos dividido la seccioacuten
Para cada uno de los rectaacutengulos tenemos
T i=GθJ i
L J i=
ai bi3
3i=123 hellip
9
T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

T=T 1+T 2+T 3=Gθ(J 1+J2+J3)
L
T=GθLsumi=1
n
J i
Y se puede definir un momento polar total JT como JT=sumi=1
n
J i Respecto a los
esfuerzos de corte maacuteximo vamos a tener distintos valores para cada una de las partes rectangulares como
τmax=Gθ bi
Li=123 hellip
Pero
T=GθL
J T θ= TLG J T
τmax=T bi
J T
i=123 hellip
5 Torsioacuten en eje de seccioacuten delgada cerrada
Ahora trataremos el uacuteltimo caso especial que corresponde a un eje de pared delgada cerrada Antes de iniciar el anaacutelisis de este caso es necesario hacer una observacioacuten respecto a los esfuerzos de corte en una viga o eje de pared delgada En un caso como este asumiremos que la direccioacuten de los esfuerzos de corte sigue el perfil de la pared delgada tal como se muestra como en la Figura 12
10
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17
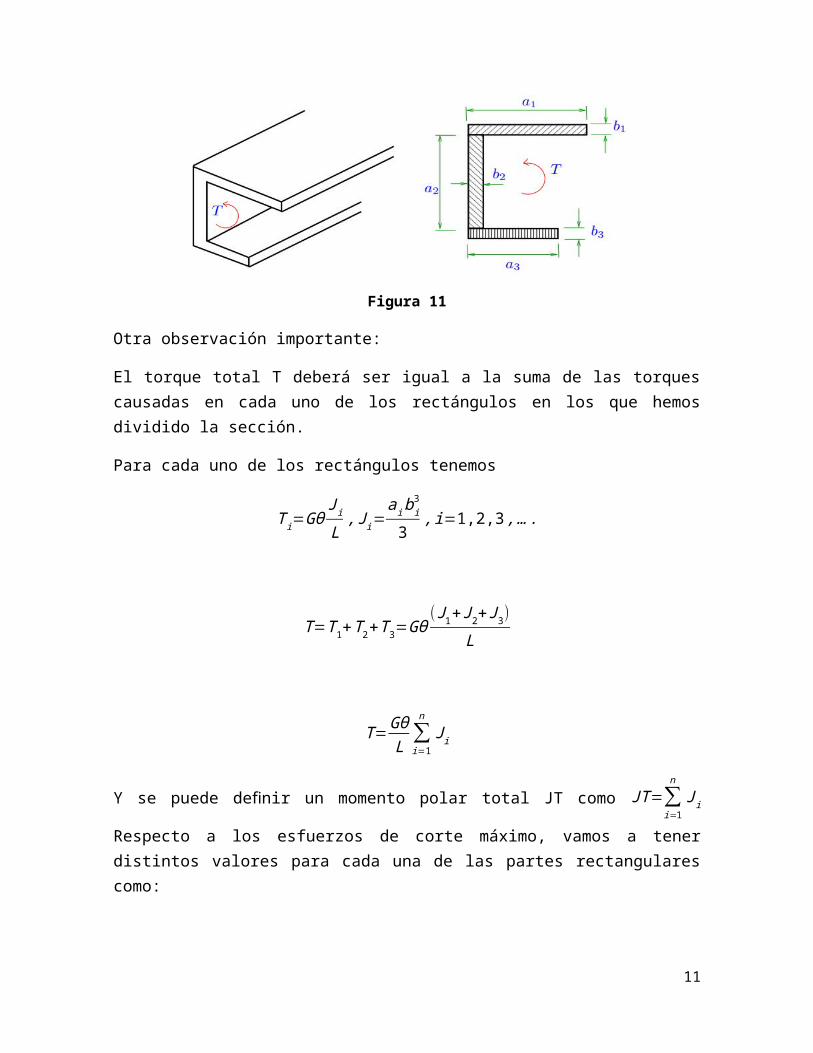
Figura 12
Consideremos el eje mostrado en la Figura 13 en donde tenemos una vista tridimensional de un eje cerrado de pared delgada Por simplicidad la parte exterior del eje se asume totalmente plana es decir tiene la forma de un rectaacutengulo sin embargo la parte interior es irregular es decir el espesor si bien pequentildeo es variable en el contorno
Extraigamos una parte de la pared del eje que se dibuja en la figura tridimensional Tenemos una vista frontal del eje y otra vista lateral en la misma Figura 13 En estas vistas es posible apreciar la forma de esta parte o elemento que se ha extraiacutedo de la pared del eje El elemento puede tener una longitud finita en la direccioacuten del contorno dela pared pero en la direccioacuten axial (que hemos denominado l) este elemento tiene una longitud infinitesimal dl De la observacioacuten concerniente a la Figura 412 tenemos que la distribucioacuten de esfuerzos de corte sigue la forma del contorno de la pared como se ve en la vista frontal en la Figura 413 En el punto 1 tenemos un esfuerzo de corte τ1 y un espesor de pared t1 en el punto 2 tenemos τ2 y t2 Como en la direccioacuten l la longitud del elemento es diferencial por equilibrio a la rotacioacuten en las caras en la direccioacuten del eje l se deben generar componentes del esfuerzo de corte como se aprecia en la vista lateral
El elemento debe estar en equilibrio de modo que en particular esto implica que
sum F=0 luego de la Figura 13 tenemos que
τ 1 t 1dlminusτ 2 t 2dl=0
De donde se tiene que
11
τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

τ 1 t 1=τ 2 t 2
Como la igualdad anterior es vaacutelida para cualquier par de puntos en el contorno de la pared del eje se cumple que
τ 1 t 1=τ 2 t 2=τ 3 t 3==τ iti=Q=constante
El resultado anterior es vaacutelido para cualquier forma de la pared de la viga luego consideacuterese la Figura 14 en donde tenemos una vista frontal de un eje de una pared de forma mucho maacutes arbitraria En esta figura vemos el centro respecto al cual el eje sufre la torsioacuten y a partir de acuteel tenemos el vector r que nos da la posicioacuten de cualquier punto en el contorno de la pared tenemos tambieacuten el vector tangente ds y su longitud que llamamos simplemente ds
Figura 14
De modo que el maacuteximo esfuerzo de corte se obtendriacutea como
τmax= T2 A tmin
6 Ejercicios de torsioacuten
1 En la Figura se muestra un eje macizo compuesto de dos barras que se sueldan en A Las barras son de materiales diferentes y por tanto sus moacutedulos de corte son distintos iquestQueacute valor tiene el aacutengulo de torsioacuten del extremo BDatos
L1=10 pie L2=12 pie T 1=500 lbfpie T 2=1000 lbfpie G 1=10lowast106 lbf pulg 2G 2=15lowast106 lbf pulg2 d=3 pulg
12
Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

Solucioacuten
El primer paso para solucionar el problema es hacer un DCL de toda la barra compuesta
T R es el torque de reaccioacuten causado por la pared sobre el eje como el cuerpo
estaacute en equilibrio tenemos
T R=T 2minusT 1=500 lbfpie
Diagrama de cuerpo libre de la primera seccioacuten
θ=32T R L12
π G1d4 =4527lowast10minus3 rad
diagrama de cuerpo libre del tramo restante
13
θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

θ=32T 2 L12
π G1d4 =905lowast10minus3 rad
θ=32T 2 L22
π G2d4 =00145 rad
θB=4527times10minus3+905times10minus3+00145=0028 rad
2 Una viga bien potrada estaacute sometida a un momento torsor producido por una torsioacuten uniformemente
repartida Hallar el MT maacutex y el aacutengulo de torsioacuten maacuteximo
Resolucioacuten
14
ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

ResolucioacutenPor ser una viga simeacutetrica 1048735 los momentos de empotramiento han de ser iguales
15
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17
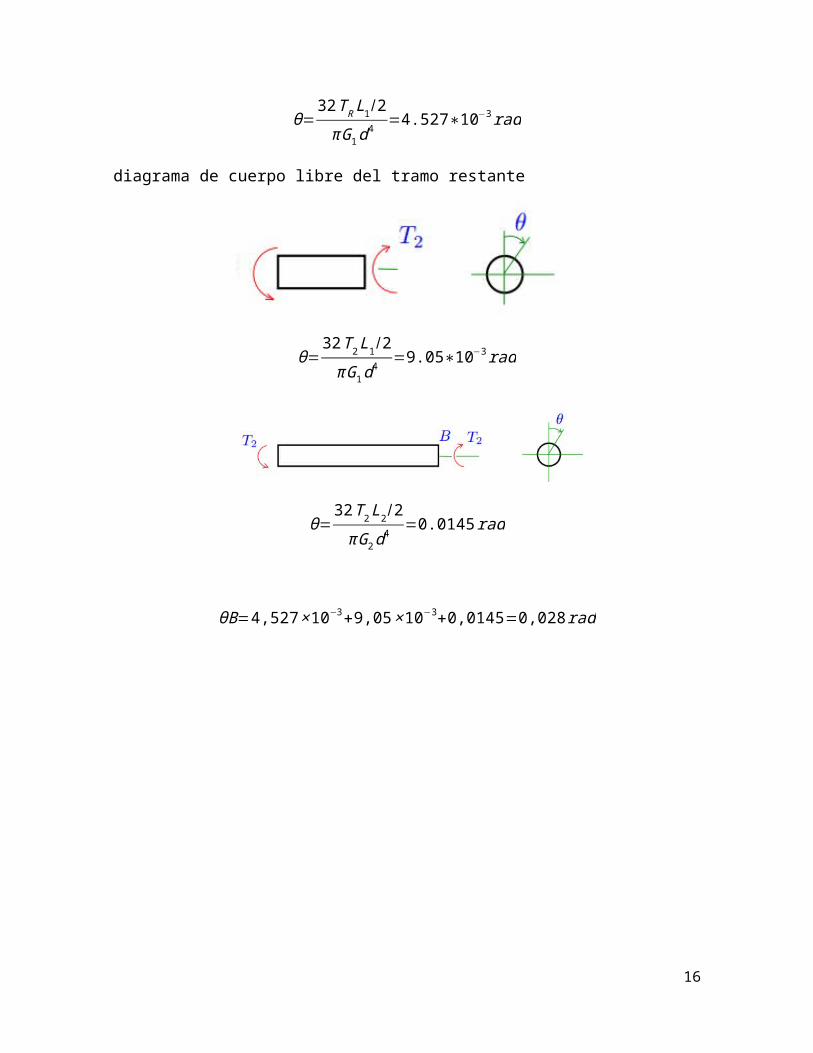
CONCLUSIONES
En la mecaacutenica de materiales los esfuerzos que actuacutean sobre una superficie plana pueden ser uniformes en toda el aacuterea o bien variar en intensidad de un punto a otro mientras que la deformacioacuten puede ser visible o praacutecticamente inadvertida si no se emplea el equipo apropiado para hacer mediciones precisas
Otro punto importante que cabe destacar es que la flexioacuten pura se refiere a la flexioacuten de un elemento bajo la accioacuten de un momento flexionante constante ya que cuando un elemento se encuentra sometido a flexioacuten pura los esfuerzos cortantes sobre eacutel son cero En cambio en la flexioacuten no uniforme el momento flexionante cambia conforme nos movemos a lo largo del eje de la viga
Recordemos tambieacuten que la fatiga va ocurrir en metales cuando el material es sometido a ciclos de esfuerzos y deformacioacuten Por ultimo debemos tener presente que la torsioacuten se caracteriza geomeacutetricamente porque cualquier curva paralela al eje de la pieza y deja de estar contenida en el plano formado inicialmente por la dos curvas
16
ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17

ANEXOS
Tabla 1
TABLA 2 DESPLAZAMIENTOS Y GIROS EN LOS EXTREMOS DE ALGUNAS VIGAS
17





























