Embed Size (px)
Citation preview

Course: MCASubject: Computer Oriented Numerical
Statistical MethodsUnit-1
RAI UNIVERSITY, AHMEDABAD
RAI UNIVERSITY, AHMEDABAD 1

Unit-I- Solution of Non-linear Equations
Sr.
No.
Name of the Topic Page
No.
1 Absolute, Relative and Percentage Error 1
2 Roots of an equation, Linear and non-Linear equations
(Definition and Difference),
4
3 Iterative Methods for finding roots of non-Linear equations :
Bisection Method
5
4 Iterative Methods for finding roots of non-Linear equations :
Newton-Raphson Method
14
5 Iterative Methods for finding roots of non-Linear equations :
False Position Method
18
6 Iterative Methods for finding roots of non-Linear equations :
secant Method
25
7 Exercise 29
8 References 30
RAI UNIVERSITY, AHMEDABAD 2

1.1 Errors
In practice, all measurements are subject to errors and it is therefore of importance
to find the total effect of small errors in the observed values of the variables, on a
quantity which depends on these variables.
If δx is an error in X then
|δx|=|True value−Approximate value| is called an absolute error in X ,
δxx
is called the relative error in X and
δxx
× 100 is called the percentage error in X .
Example—
A circle of radius r=5 cm having an error in radius 10 % ,then find percentage
error in its area.
Solution:
Area of circle A=π r2
∴ A=π r2 ⇒ δA=2πrδr
Now δAA
=2 πrδr
π r2
δAA
=2 δrr
∴ δAA
× 100=2 ( δrr
× 100) ∴ δA
A× 100=2 (10 )
∴ δAA
× 100=20
Therefore percentage error in Area of circle is 20.
Example—
RAI UNIVERSITY, AHMEDABAD 3

A cuboid having error in their sides equal to 2 % , 5 %∧1 % . Then find the
corresponding error in its volume.
Solution:
Volume of cuboid is V=l × w ×h
δV =whδl+ lhδw+wlδh
Now we have to given that, l=2 % , w=5 % , h=1 %
δVV
=whδl+lhδw+wlδhl × w ×h
δVV
×100=( δll+ δh
h+ δw
w )×100
δVV
×100=( δll
×100)+( δhh
× 100)+( δww
×100) δVV
×100=2+5+1
δVV
×100=8
Error in Volume of cuboid = 8 %
Example—
A right circular cone of radius r=10 cm∧h=20 cm having percentage error in
radius equal to 1 % and percentage error in height equal to 5 % then find
(i) Absolute error
(ii) Relative error
(iii) Percentage error
in the volume of right circular cone.
Solution:
Volume of right circular cone
V=13
π r2 h
δV =13
2 rδrh+13
π r 2δh
RAI UNIVERSITY, AHMEDABAD 4

Now we have to given that r=10 cm, h=20 cm ,δrr
×100=1 ,δhh
×100=5
δr=1× r100
¿δh=5 ×h100
δV =13
π [2×r × h×( 1× r100 )+r 2( 5× h
100 )] δV =1
3π [2×10 ×20 ×
1 ×10100
+10 × 10× 5× 20100 ]
δV =13
π [ 40+100 ]
δV =13
π [140]
δV =146.53
∴Absolute error δV =146.53
⇒ δVV
=146.5313
π r2 h= 3 × 146.53
π ×100 × 20
∴ δVV
=439.596283
=0.06996≅ 0.07
∴ Relative error δVV
=0.07
δVV
×100=0.07 ×100=7
∴ Percentage error = 7 %
2.1 Linear equation— General form of a linear equation is—
ax+by=c, where a ,b∧c are constants.
2.2 Graph of a linear equation— An equation ax+by=c represents a straight line.
2.3 Solution of two linear equations— Solution of two linear equations
a1 x+b1 y=c1 and a2 x+b2 y=c2 is given by—
x=c1 b2−c2b1
a1 b2−a2 b1 and y=
c2a1−c1a2
a1b2−a2 b1.
RAI UNIVERSITY, AHMEDABAD 5

Graphically this solution gives the point of intersection of these straight lines.
Example—
Find the solution of the equations x+2 y=3 and3 x+ y=4.
Solution— given straight lines are x+2 y=3 and3 x+ y=4.
Here, a1=1 ,b1=2 , c1=3 , a2=3 , b2=1 , c2=4
Hence, x=c1 b2−c2b1
a1 b2−a2 b1
=3.1−4.21.1−3.2
=3−81−6
=1 and y=c2a1−c1a2
a1b2−a2 b1
=4.1−3.31.1−3.2
=4−91−6
=1
2.4 Definition: Non-linear equation:
A polynomial of degree at least 2 is called non- linear equation.
Graph of a non-linear equation is not a straight line.
e.g.x3−3 x+1=0, cosx−xe x=0.
2.5 Here we use Numerical Methods for solving Non-linear equations like
Bisection Method
Regula-Falsi Method
Newton-Raphson Method
Secant Method
3.1 Introduction—
In the Applied mathematics and engineering the problem of determining the roots
of an equation f (x)=0 has a great importance.
If f (x) is a polynomial of degree two or more , we have formulae to find
solution. But, if f(x) is a transcendental function, we do not have formulae to
obtain solutions. When such type of equations are there, we have some
RAI UNIVERSITY, AHMEDABAD 6

methods like Bisection method, Newton-Raphson Method and The method
of false position. Those methods are solved by using a theorem in theory of
equations, i.e., “If f(x) is continuous in the interval (a ,b)and if f (a) and f (b)
are of opposite signs, then the equation f (x)=0 will have at least one real
root between aand b”.
3.2 Definition—
A number ξ is a solution of f (x)=0 if f (ξ)=0 . Such a solution ξ is a root of f (x)=0.
3.3 Iterative Method—
This method is based on the idea of successive approximation.i.e. Starting with one
or more initial approximations to the root, we obtain a sequence of approximations
or iterates {xk } , which in the limit converges to the root.
Definition—
A sequence of iterates {xk } is said to converge to the root ξ, if
limk⟶∞
|xk−ξ|=0∨ limk⟶∞
xk=ξ.
3.4 Bisection Method—
Let us suppose we have an equation of the form f (x)=0 in which solution lies
between in the range (a ,b) .
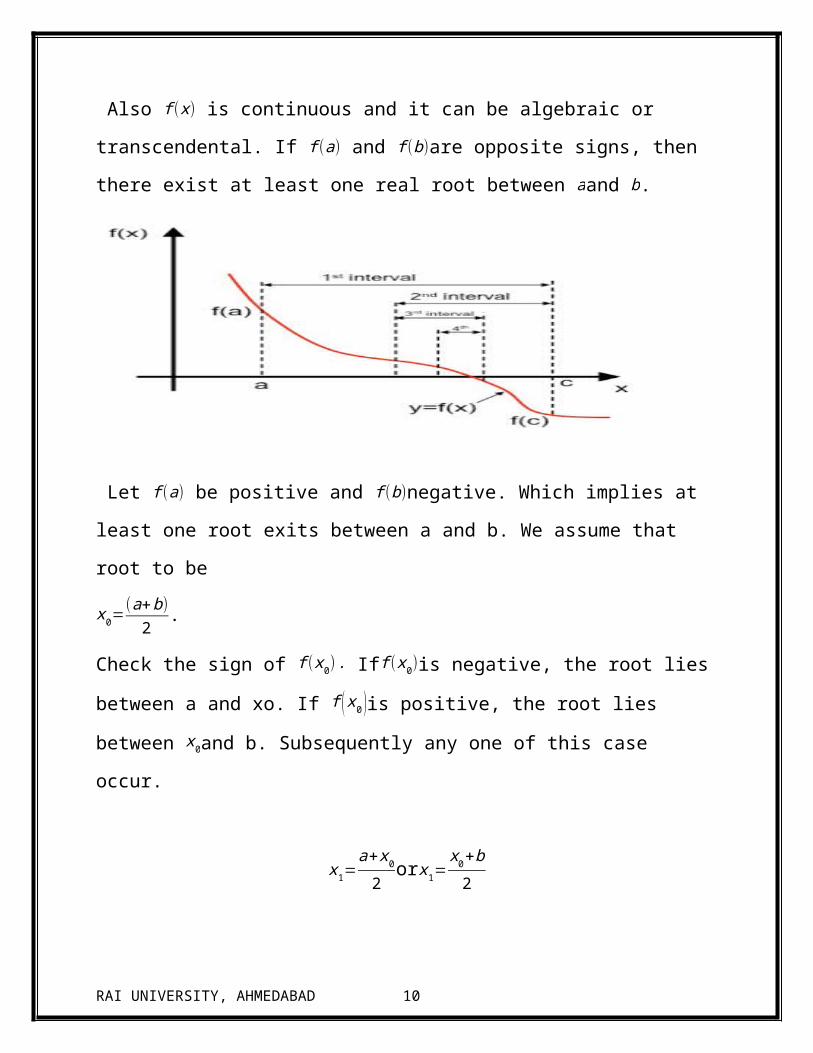
Also f (x) is continuous and it can be algebraic or transcendental. If f (a) and f (b)
are opposite signs, then there exist at least one real root between aand b.
RAI UNIVERSITY, AHMEDABAD 7

Let f (a) be positive and f (b)negative. Which implies at least one root exits
between a and b. We assume that root to be
x0=(a+b)
2.
Check the sign of f (x0) . Iff (x0)is negative, the root lies between a and xo. If f ( x0 )is
positive, the root lies between x0and b. Subsequently any one of this case occur.
x1=a+x0
2orx1=
x0+b
2
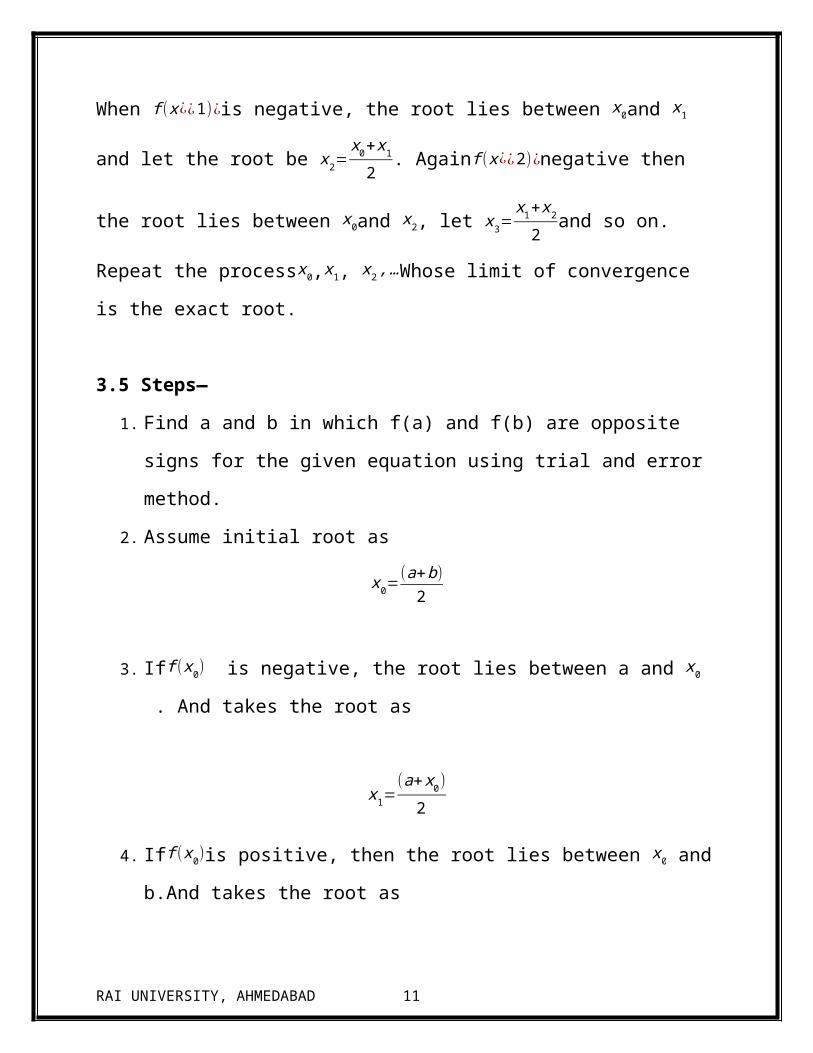
When f (x¿¿1)¿is negative, the root lies between x0and x1 and let the root be
x2=x0+x1
2. Againf (x¿¿2)¿negative then the root lies between x0and x2, let x3=
x1+x2
2
and so on.
Repeat the processx0,x1, x2 , …Whose limit of convergence
is the exact root.
3.5 Steps—
RAI UNIVERSITY, AHMEDABAD 8

1. Find a and b in which f(a) and f(b) are opposite signs for the given equation
using trial and error method.
2. Assume initial root as
x0=(a+b)
2
3. Iff (x0) is negative, the root lies between a and x0 . And takes the root as
x1=(a+ x0)
2
4. Iff (x0)is positive, then the root lies between x0 and b.And takes the root as
x1=(x0+b)
2
5. Iff (x1) is negative, the root lies between x0and x1 . And takes the root as
x2=(x0+x1)
2
6. Iff (x1) is positive, the root lies between x0and x2 . And takes the root as
x2=(x0+x2)
2
7. Repeat the process until any two consecutive values are equal and hence the
root.
This method is simple to use and the sequence of approximations always
converges to the root for any f (x) which is continuous in the interval that contains
the root.
RAI UNIVERSITY, AHMEDABAD 9
If the permissible error isε, then the approximation number of iteratives required
may be determined from the relationb0−a0
2n ≤ ε.
The minimum number of iterations required for converging to a root in the interval
(0,1) for a given ε are listed as
Number of iterations
ε 10−2 10−3 10−4 10−5 10−6 10−7
n 7 10 14 17 20 24
The bisection method requires a large number of iterations to achieve a reasonable
degree of accuracy of the root. It requires one function at each iteration.
Example—
Find the positive root of x3−x=1correct to four decimal places by bisection
method.
Solution—
Let f ( x )=x3− x−1
f (0 )=03−0−1=−1=−ve
f (1 )=13−1−1=−1=−ve
f (2 )=23−2−1=5=+ve
So the root lies between the 1 and 2.
We can take x0=1+2
2=3
2=1.5 as initial root and proceed.
i.e.,f (1.5)=0.8750=+ve
andf (1)=−1=−ve
So the root lies between 1 and 1.5.
RAI UNIVERSITY, AHMEDABAD 10
x1=1+1.5
2=2.5
2=1.25
as initial root and proceed.
f (1.25)=−0.2969
So the root x2lies between 1.25 and 1.5.
Now
x2=1.25+1.5
2=2.75
2=1.3750
f (1.375)=0.2246=+ve
So the root x3lies between 1.25 and 1.375.
Now
x3=1.25+1.3750
2=2.6250
2=1.3125
f (1.3125)=−0.051514=−ve
Therefore, root lies between 1.375and 1.3125
Now
x4=(1.375+1.3125)/2=1.3438
f (1.3438)=0.082832=+ve
So root lies between 1.3125 and 1.3438
Now
x5=(1.3125+1.3438)/2=1.3282
f (1.3282)=0.014898=+ve
So root lies between 1.3125 and 1.3282
Now
x6=(1.3125+1.3282)/2=1.3204
RAI UNIVERSITY, AHMEDABAD 11

f (1.3204)=−0.018340=−ve
So root lies between 1.3204 and 1.3282
Now
x7=(1.3204+1.3282)/2=1.3243
f (1.3243)=−ve
So root liesbetween 1.3243and 1.3282
Now
x8=(1.3243+1.3282)/2=1.3263
f (1.3263)=+ve
So root lies between 1.3243 and 1.3263
Now
x9=(1.3243+1.3263)/2=1.3253
f (1.3253)=+ve
So root lies between 1.3243 and 1.3253
Now
x10=(1.3243+1.3253) /2=1.3248
f (1.3248)=+ve
So root lies between 1.3243 and 1.3248
Now
x11=(1.3243+1.3248)/2=1.3246
f (1.3246)=−ve
So root lies between 1.3248 and 1.3246
Now
RAI UNIVERSITY, AHMEDABAD 12

x12=(1.3248+1.3246) /2=1.3247
f (1.3247)=−ve
So root lies between 1.3247 and 1.3248
Now
x13=(1.3247+1.3247)/2=1.32475
Hence the approximate root is 1.32475 .
Example—
Find the positive root of x – cos x=0 by bisection method.
Solution—
Let
f ( x )=x – cos x , f (0)=0−cos (0)=0−1=−1=−ve
f (0.5)=0.5 – cos(0.5)=−0.37758=−ve
f (1)=1 – cos (1)=0.42970=+ve
So root lies between 0.5 and 1
Let
x0=(0.5+1 )
2=0.75
as initial root and proceed.
f (0.75)=0.75 – cos(0.75)=0.018311=+ve
So root lies between 0.5 and 0.75
x1=(0.5+0.75)/2=0.62
f (0.625)=0.625 – cos(0.625)=−0.18596
So root lies between 0.625 and 0.750
x2=(0.625+0.750)/2=0.6875
RAI UNIVERSITY, AHMEDABAD 13

f (0.6875)=−0.085335
So root lies between 0.6875 and 0.750
x3=(0.6875+0.750)/2=0.71875
f (0.71875)=0.71875−cos (0.71875)=−0.033879
So root lies between 0.71875 and 0.750
x4=(0.71875+0.750) /2=0.73438
f (0.73438)=−0.0078664=−ve
So root lies between 0.73438 and 0.750
x5=0.742190
f (0.742190)=0.0051999=+ve
x6=(0.73438+0.742190)/2=0.73829
f (0.73829)=−0.0013305
So root lies between 0.73829 and 0.74219
x7=(0.73829+0.74219)=0.7402
f (0.7402)=0.7402
cos (0.7402)=0.0018663
So root lies between 0.73829 and 0.7402
x8=0.73925
f (0.73925)=0.00027593
x9=0.7388
The root is 0.7388.
3.6 Advantages of bisection method—
a) The bisection method is always convergent. Since the method brackets the
root, the method is guaranteed to converge.
b) As iterations are conducted, the interval gets halved. So one can guarantee
the error in the solution of the equation.
RAI UNIVERSITY, AHMEDABAD 14

3.7 Drawbacks of bisection method—
a) The convergence of the bisection method is slow as it is simply based on
halving the interval.
b) If one of the initial guesses is closer to the root, it will take larger number of
iterations to reach the root.
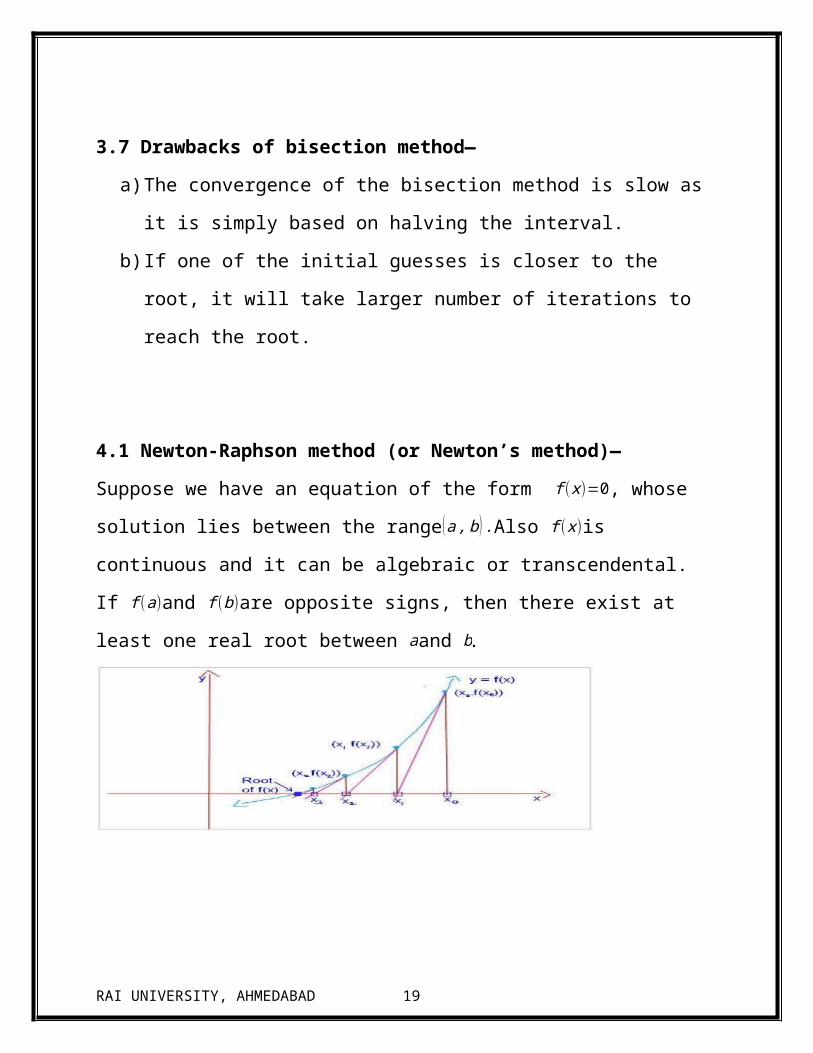
4.1 Newton-Raphson method (or Newton’s method)—
Suppose we have an equation of the form f (x)=0, whose solution lies between the
range(a , b ) .Also f (x)is continuous and it can be algebraic or transcendental. If f (a)
and f (b)are opposite signs, then there exist at least one real root between aand b.
Let f (a)be positive and f (b)negative. Which implies at least one root exits in
between aand b. We assume that root to be either a or b, in which the value of
f (a)orf (b) is very close to zero. That number is assumed to be initial root. Then we
iterate the process by using the following formula until the value is converges.
xn+1=xn−f (xn)f ' (xn)
4.2 Steps—
1. Find aand b in whichf (a)and f (b) are opposite signs for the given equation
using trial and error method.
RAI UNIVERSITY, AHMEDABAD 15

2. Assume initial root as x0=a i.e., if f (a)is very close to zero or x0=b iff (a)is
very close to zero.
3. Find x1 by using the formula
x1=x0−f (x0)f ' (x0)
4. Find x2 by using the following formula
x2=x1−f ( x1 )f ' ( x1 )
5. Find x3 , x4 , . .. xn until any two successive values are equal .
Example 1—
Find the positive root of f (x)=2x3−3 x−6=0 by Newton – Raphson method
correct to five decimal places.
Solution—
Letf (x)=2x3−3 x – 6 ; f ' (x)=6 x2 – 3
xn+1=xn−f ( xn )f ' ( xn )
=xn−2 xn
3−3 xn –6
6 xn2 – 3
=(6 xn
3−3 xn) – (2 xn3−3 xn – 6)
6 xn2 – 3
=6 xn
3−3 xn – 2xn3+3 xn+6
6 xn2 – 3
=4 xn
3+6
6 xn2 – 3
f (1)=2−3−6=−7=−ve
f (2)=16 – 6−6=4=+ve
So, a root between 1 and 2 .
In which 4 is closer to 0. Hence we assume initial root as 2.
Consider x0=2
So
RAI UNIVERSITY, AHMEDABAD 16

x1=4 x0
3+6
6 x02 –3
= 4 × 23+66× 22−3
=3821
=1.809524
x2=(4 (1.809524 )3+6)/(6 (1.809524 )2−3)=29.700256 /16.646263=1.784200
x3=(4 (1.784200 )3+6) /(6 (1.784200 )2−3)=28.719072/16.100218=1.783769
x4=(4 (1.783769 )3+6)/(6 (1.783769 )2−3)=28.702612/16.090991=1.783769
Since x3 and x4 are equal, hence root is 1.783769 .
Example 2—
Using Newton’s method, find the root between 0 and 1 of x3=6 x – 4 correct to 5
decimal places.
Solution—
Letf ( x )=x3−6 x+4
xn+1=xn−f ( xn )f ' ( xn )
¿ xn−xn
3−6 xn+4
3 xn2−6
=(3 x¿¿n¿¿3−6 xn)−(xn
3−6 xn+4 )3 xn
2−6¿¿
¿3 xn
3−6 xn−xn3+6 xn−4
3 xn2−6
=2 xn
3−4
3 xn2−6
f (0 )=4=+ve; f (1)=−1=−ve
So a root lies between 0 and 1
f (1)is nearer to 0. Therefore we take initial root as x0=1
x1=2 xn
3−4
3 xn2−6
=2 ×13−43 ×12−6
=2−43−6
=−2−3
=0.66666
RAI UNIVERSITY, AHMEDABAD 17

x2=(2 (0.66666 )3 – 4) /(3 (0.66666 )2−6)=0.73016
x3=(2 (0.73015873 )3 – 4)/ (3 (0.73015873 )2−6)=(3.22145837 /4.40060469)=0.73205
x4=(2 (0.73204903 )3 – 4)/(3 (0.73204903 )2−6)=(3.21539602/4.439231265)=0.73205
The root is 0.73205 correct to 5 decimal places.
4.3 Advantages of Newton Raphson method—
Fast convergence!
4.4 Disadvantages of Newton Raphson method—
a) May not produce a root unless the starting value x0 is close to the actual root
of the function.
b) May not produce a root if for instance the iterations get to a pointxn−1such that
f ' ( xn−1 )=0 . then the method is false.
5.1 Method of False Position ( or RegulaFalsi Method )—
Let us consider the equation f (x)=0and f (a) and f (b) are of opposite signs. Also let
a<b .
The graph y=f (x ) will meet the x-axis at some point between A(a , f (a)) and
B(b , f (b)).The equation of the chord joining the two points A(a , f (a)) and B(b , f (b))
is
y – f (a)x−a
=f (a)−f (b)
a−b
The x- Coordinate of the point of intersection of this chord with the x-axis gives an
approximate value for the of f (x)=0. Taking y = 0 in the chord equation, we get
– f (a)x−a
=f (a)−f (b)
a−b
⟹ x [ f (a)−f (b)]−a f (a)+a f (b)=−a f (a)+b f (a)
⟹ x [ f (a )−f (b ) ]=b f (a )−a f ( b )
RAI UNIVERSITY, AHMEDABAD 18
⟹ x=b f (a )−a f ( b ) ;
f (a )−f (b )
This x1gives an approximate value of the root (x )=0.(a<x1<b) .
Now f (x1) and f (a) are of opposite signs or f (x1) and f (b) are opposite signs.
Iff ( x1 ) . f (a)<0 . Then x2 lies between x1 and a.
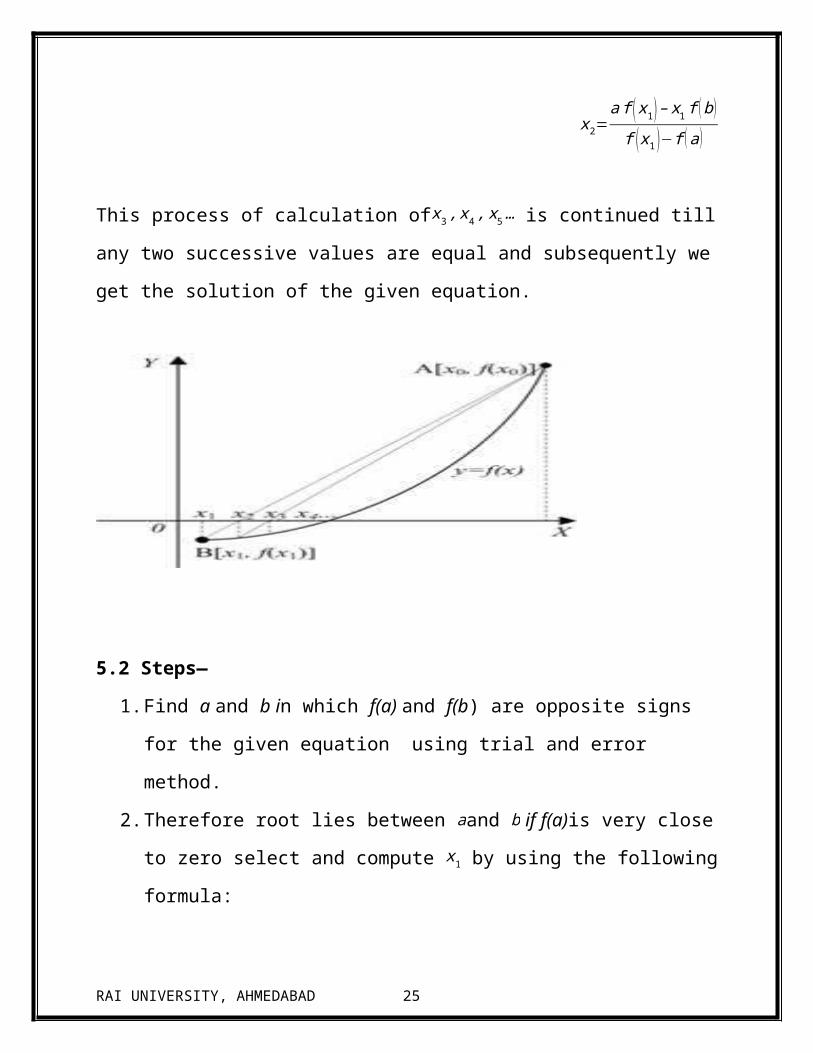
x2=a f ( x1 ) – x1 f (b )
f ( x1 )−f (a )
This process of calculation ofx3 , x4 , x5… is continued till any two successive values
are equal and subsequently we get the solution of the given equation.
5.2 Steps—
1. Find a and b in which f(a) and f(b) are opposite signs for the given equation
using trial and error method.
RAI UNIVERSITY, AHMEDABAD 19

2. Therefore root lies between aand b if f(a)is very close to zero select and
compute x1 by using the following formula:
x1=af (b )−bf (a)
f (b )−f (a)
3. If (x1) , f (a)<0 . then root lies between x1 and a .Compute x2 by using the
following formula:
x2=af ( x1)−x1 f (b)
f ( x1 )−f (a)
4. Calculate the values of x3 , x4 , x5 ,… by using the above formula until any two
successive values are equal and subsequently we get the solution of the
given equation.
Example —
Solve for a positive root of x3−4 x+1=0 by and Regula Falsi method
Solution—
Let f (x)=x3−4 x+1=0
f (0)=03−4 (0)+1=1=+ve
f (1)=13−4(1)+1=−2=−ve
So a root lies between 0 and 1
We shall find the root that lies between 0 and 1.
Here a=0 , b=1
x1=0 ×f (1 )−1× f (0)
f (1 )−f (0)=
0 × (−2 )−1× 1(−2)−1
=0−1−3
=13=0.333333
f (x1)=f (1/3)=(1/27)−(4 /3)+1=−0.2963
Now f (0) and f (1/3) are opposite in sign.
Hence the root lies between 0 and 1/3.
RAI UNIVERSITY, AHMEDABAD 20

x2=0 × f ( 1
3 )−13
f (0)
f ( 13 )−f (0)
= −0.3333−0.2963−1
=−0.3333−1.2963
=0.25714
Now f (x2)=f (0.25714 )=−0.011558=−ve
So the root lies between 0 and 0.25714
x3=0 × f (0.25714)−0.25714 × f (0)
f (0.25714 )– f (0)= −0.25714
−1.011558=0.25420
f (x3)=f (0.25420)=−0.0003742
So the root lies between 0 and 0.25420
x4=0 × f (0.25420)−0.25420 × f (0)
f (0.25420)– f (0)=−0.25420/−1.0003742=0.25410
f (x4)=f (0.25410)=−0.000012936
The root lies between 0 and 0.25410
x5=0 × f (0.25410)−0.25410 × f (0)
f (0.25410)– f (0)=−0.25410/−1.000012936=0.25410
Hence the root is 0.25410.
Example 2—
Find an approximate root of x log 10 x – 1.2=0 by False position method.
Solution—
RAI UNIVERSITY, AHMEDABAD 21

Let f (x)=x log 10 x – 1.2
f (1)=−1.2=−ve; f (2)=2×0.30103−1.2=−0.597940
f (3)=3 ×0.47712 –1.2=0.231364=+ve
So, the root lies between 2 and 3.
x1=2 f (3)– 3 f (2)
f (3)– f (2)=
2× 0.23136 – 3×(−0.59794 )0.23136+0.597
=2.721014
f ( x1 )=f (2.7210 )=−0.017104=−ve
The root lies between x1 and 3.
x2=x1 × f (3 ) – 3× f ( x1 )
f (3 ) – f ( x1 )
¿2.721014 ×0.231364 – 3× (−0.017104 )
0 .23136+0.017104
¿ 0.629544+0.0513120.24846
=0.6808560.248464
=2.740260
f ( x2 )=f (2.7402 )=2.7402 × log (2.7402 ) – 1.2=−0.00038905=−ve
So the root lies between 2.740260 and 3.
x3=2.7402× f (3) – 3× f (2.7402)
f (3) – f (2.7402)=
2.7402 x 0.231336+3 x (0.00038905)0.23136+0.00038905
=0.635140.23175
=2.740627
f ( x3 )=f (2.7406 )=0.00011998=+ve
So the root lies between 2.740260 and 2.740627
x4=2.7402 x f (2.7406) – 2.7406 x f (2.7402)
f (2.7406) – f (2.7402)=2.7402 x 0.00011998+2.7406 x 0.00038905
0.00011998+0.00038905= 0.0013950
0.00050903=2.7405
RAI UNIVERSITY, AHMEDABAD 22

Hence the root is 2.7405.
5.3 Advantages of RegulaFalsi Method—
No need to calculate a complicated derivative (as in Newton's method).
5.4 Disadvantages of RegulaFalsi Method—
a) May converge slowly for functions with big curvatures.
b) Newton-Raphson may be still faster if we can apply it.
5.5 Rate Of Convergence —
Here we discuss the rate at which the iteration method converges if the initial
approximation to the root is sufficiently close to the desired root.
5.5.1Definition—
An iterative method is said to be of order p or has the rate of convergence p, if p is
the largest positive real number for which there exists a finite constant C ≠ 0 such
that
|εk+1|≤ C|εk|p
Where ε k=xk−ξ is the error in the kth iteratation. The constant C is called the
asymptotic error constant and usually depends on the derivative of f (x) atx=ξ.
5.5.2 Newton-Raphsons Method—
We know
xk+1=xk−f ( xk)f ' (xk)
, k=1,2 , …
RAI UNIVERSITY, AHMEDABAD 23

On substitutingxk=ξ+εk, expanding f ( ξ+εk ) , f ' (ξ+εk) in Taylor series about the point
ξ, we get
ε k+1=εk−ε k f ' (ξ )+ 1
2ε k
2 f ' ' (ξ )+…
f ' (ξ )+εk f ' ' (ξ )+…
¿ ε k−[ 12
f ' ' (ξ )f ' (ξ )
εk2+…] [1+
f ' ' (ξ )f ' (ξ )
εk+… ]−1
ε k+1=12
f ' ' (ξ )f ' (ξ )
εk2+O (ε k
3) .
On neglecting the ε k3 and higher power of ε k
❑, we get
ε k+1=C εk2
Where C=12
f ' ' (ξ )f ' (ξ )
.
Thus, the Newton-Raphsons Method has second order convergence.
5.5.3 Regula Falsi Method—
If the function f (x) in the equation f ( x )=0 is convex in the interval (x¿¿0 , x1)¿that
contains the root, then one of the points x0orx1 is always fixed and the other point
varies with k . If the point x0is fixed , then the function f (x) is approximated by the
line passing through the points (x0 , f (x0)) and (xk , f (xk )) , k=1,2,3 ,… the error of the
equation becomes
ε k+1=C ε0 εk
Where C=12
f ' ' (ξ )f ' (ξ )
and ε 0=x0−ξ is independent of k . Therefore we can write
ε k+1=C ¿ε k
Where C ¿=C ε0 is the asymptotic error constant. Hence the Regula-Falsi method has
linear rate of convergence.
6.1 Secant Method
RAI UNIVERSITY, AHMEDABAD 24
Although the Newton-Raphson method is very power full to solve non-linear
equations, evaluating of the function derivative is the major difficulty of this
method. To overcome this deficiency, the secant method starts the iteration by
employing two starting points and approximates the function derivative by
evaluating of the slope of the line passing through these points. The secant method
has been shown in Fig. 1. As it is illustrated in Fig. 1, the new guess of the root of
the function f(x) can be found as follows:
In the first glance, the secant method may be seemed similar to linear interpolation
method, but there is a major difference between these two methods. In the secant
RAI UNIVERSITY, AHMEDABAD 25
method, it is not necessary that two starting points to be in opposite sign.
Therefore, the secant method is not a kind of bracketing method but an open
method. This major difference causes the secant method to be possibly divergent in
some cases, but when this method is convergent, the convergent speed of this
method is better than linear interpolation method in most of the problems.
The algorithm of the secant method can be written as follows:
6.2 Steps—
Step 1: Choose two starting points x0 and x1.
Step 2: Let
Step 3: if |x2-x1|<e then let root = x2, else x0 = x1 ; x1 = x2 ; go to step 2.
Step 4: End.
e: Acceptable approximated error.
Example—
A Real root of the equation f ( x )=x3−5x+1=0 lies in the interval (0,1 ) . Perform
four iterations of the secant method.
Solution:
We have x0=0 , x1=1 , f 0=f ( x0 )=1 , f 1=f ( x1 )=−3
x2=x1−[ x0−x1
f 0−f 1] f 1=1−[ 0−1
1+3 ] (−3 )=1−34=0.25
f 2=f ( x2 )=f (0.25 )=−0.234375
x3=x2−[ x1−x2
f 1−f 2]=0.186441
RAI UNIVERSITY, AHMEDABAD 26
∴ f 3=f ( x3)=0.074276
x4=x3−[ x3−x2
f 3−f 2] f 3=0.201736
∴ f 4=f ( x4 )=−0.000470
x5=x4−[ x 4−x3
f 4−f 3] f 4=0.201640
6.3 Advantages of secant method:
1. It converges at faster than a linear rate, so that it is more rapidly
convergent than the bisection method.
2. It does not require use of the derivative of the
function, something that is not available in a number
of applications.
3. It requires only one function evaluation per iteration,
as compared with Newton’s method which requires
two.
6.4 Disadvantages of secant method:
1. It may not converge.
2. There is no guaranteed error bound for the computed
iterates.
3. It is likely to have difficulty if f 0(α)=0. This
means the x-axis is tangent to the graph of y=f (x )atx=α .4. Newton’s method
generalizes more easily to new
methods for solving simultaneous systems of nonlinear
equations.
RAI UNIVERSITY, AHMEDABAD 27
EXERCISE
Que—Solve the following Examples:
1. Find a positive root of the following equation by bisection method :
x3−4 x−9
( Answer :2.7065)
2. Solve the following by using Newton – Raphson Method :x3 – x−1
( Answer :1.3247)3. Solve the following by method of false position (RegulaFalsi Method) :
x3+2 x2+10 x – 20( Answer :1.3688)
4. Solve the following equation by Secant Method up to four iteration.
cosx−xe x=0 in interval (0,1).
RAI UNIVERSITY, AHMEDABAD 28

(Answer :0.5317058606 ¿
REFERENCES
1. Numerical Method for Science and Computer science by M.K. Jain, S.R.K.
Iyenger, R.K. Jain
2. http://www.google.co.in/url?
sa=t&rct=j&q=&esrc=s&source=web&cd=2&ved=0CCMQFjAB&url=http
%3A%2F%2Fwww.b-u.ac.in%2Fsde_book
%2Fbca_numer.pdf&ei=uKenVMatGceduQTt9ILwBw&usg=AFQjCNH7o
ooXkwN7zusFPiJS7MksUkmZaw&bvm=bv.82001339,d.c2E&cad=rja
3. http://1.bp.blogspot.com/_BqwTAHDIq4E/TCqWRUqn7qI/
AAAAAAAAACE/oe-W-JZaQRI/s400/Dibujo.bmp
4. http://www.google.co.in/imgres?imgurl=http%3A%2F
%2Fimage.tutorvista.com%2Fcms%2Fimages%2F39%2Fnewton
%252513raphson-method.JPG&imgrefurl=http%3A%2F
%2Fmath.tutorvista.com%2Fcalculus%2Fnewton-raphson-
method.html&h=283&w=500&tbnid=VCvTr-sjzqmjDM
%3A&zoom=1&docid=o_YQeEzCa1CVHM&ei=B6SnVMCEDomlNqbsga
RAI UNIVERSITY, AHMEDABAD 29
AN&tbm=isch&ved=0CB0QMygBMAE&iact=rc&uact=3&dur=4533&pag
e=1&start=0&ndsp=17
5. http://www.google.co.in/url?
sa=i&rct=j&q=&esrc=s&source=images&cd=&cad=rja&uact=8&ved=0CA
cQjRw&url=http%3A%2F%2Fmathumatiks.com%2Fsubpage-373-Regula-
Falsi-Method.htm&ei=6aWnVK-
1Eo3muQSuqILABg&bvm=bv.82001339,d.eXY&psig=AFQjCNGE5QOy
UayJysWeiBMOzx7QBybl_w&ust=1420359120049725
6. http://www.numericmethod.com/About-numerical-methods/roots-of-
equations/secant-method
7. http://www.dummies.com/how-to/content/how-to-solve-nonlinear-
systems0.html
8. http://studyhelpszone.blogspot.in/2009/07/advantages-and-disadvanteges-of-
secant.html
RAI UNIVERSITY, AHMEDABAD 30
SECANT METHOD
The Newton-Raphson algorithm requires the evaluation of two functions (the function and its derivative) per each iteration. If they are complicated expressions it will take considerable
amount of effort to do hand calculations or large amount of CPU time for machine calculations. Hence it is desirable to have a method that converges (please see the section order of the numerical methods for theoretical details) as fast as Newton's method yet involves only the evaluation of the function. Let x0 and x1 are two initial approximations for the root 's' of f(x) = 0 and f(x0) & f(x1) respectively, are their function values. If x 2 is the point of intersection of x-axis and the line-joining the points (x0, f(x0)) and (x1, f(x1)) then x2 is closer to 's' than x0 and x1. The equation relating x0, x1 and x2 is found by considering the slope 'm'
m =
f(x1) - f(x0) f(x2) - f(x1) 0 - f(x1)
=
=
x1 - x0 x2 - x1 x2 - x1
x2 - x1 =- f(x1) * (x1-x0)
f(x1) - f(x0)
x2 = x1 -f(x1) * (x1-x0)
f(x1) - f(x0)
or in general the iterative process can be written as
xi+1= xi - f(xi) * (xi - xi-1 )
i = 1,2,3... f(xi) - f(xi-1)
RAI UNIVERSITY, AHMEDABAD 31

This formula is similar to Regula-falsi scheme of root bracketing methods but differs in the implementation. The Regula-falsi method begins with the two initial approximations 'a' and 'b' such that a < s < b where s is the root of f(x) = 0. It proceeds to the next iteration by calculating c(x2) using the above formula and then chooses one of the interval (a,c) or (c,h) depending on f(a) * f(c) < 0 or > 0 respectively. On the other hand secant method starts with two initial approximation x0 and x1 (they may not bracket the root) and then calculates the x2 by the same formula as in Regula-falsi method but proceeds to the next iteration without bothering about any root bracketing.
RAI UNIVERSITY, AHMEDABAD 32





























