Embed Size (px)
Citation preview

UNIVERSIDAD FERMÍN TORO
VICERECTORADO ACADEMICO
DECANATO DE INGENIERIA
ESCUELA DE INGENIERIA ELECTRICA
PROPUESTA DE DISEÑO DE UN SISTEMA DE CONTROL “PID” PARA
LOS FORMADORES DE BUCLE DE PERFILES DE ACERO EN LA
EMPRESA COMPLEJO SIDERURGICO NACIONAL. PLANTA
BARQUISIMETO.
Autor:
Raúl Bravo
Tutor:
Marbelis Moreno
Cabudare, enero 2015

CAPÍTULO II
MARCO TEÓRICO
Antecedentes de la Investigación
En el transcurso de los últimos años, se ha introducido en el mundo industrial
la noción de la electricidad y electrónica como un medio para regular y controlar
variables como la velocidad en motores, flujo, temperatura, o cualquier otra variable
con un significado y una fuerza que puede reconfigurar enormemente los esquemas
tradicionales sobre lo que se basan los conceptos actuales de automatización y
productividad industrial. El reto de toda empresa es hacer que el beneficio que brinda
al usuario sea el más óptimo y a la vez conseguir una mayor productividad a la
misma, para ello contamos con el desarrollo de nuevas tecnologías que han
demostrados ser necesarias cuando se trata de mejorar y automatizar dichos servicios.
Para el desarrollo de la investigación, la información fue recopilada en trabajos muy
importantes como fuente de ayuda para su elaboración, obteniendo antecedentes de
campos cercanos al área de estudio, entre los cuales podemos citar:
Rodríguez F (2014), en su trabajo de grado titulado “propuesta de
automatización de un horno de fundición de vidrio de la empresa ivila c.a., municipio
palavecino. En esta tesis se desarrollo la automatización de un horno para fundición
de vidrio en donde el proceso continuo depende de la intervención de equipos de alto

riesgo y personal operario, los cuales ejecutan tares de alta importancia para el
proceso; para cual se empleo un sistema de control con PLC que permita tener un
control y funcionamiento automático para el sistema de fundición de vidrio.
Márquez (2009), en su ponencia titulada sistema de control de velocidad
proporcional integral derivativo para motores eléctricos laminadores, cuyo trabajo se
basó en una interface creada en Visual Basic 6.0 para el control y monitoreo donde se
podrá configurar todos los parámetros PID y además mantener el monitoreo
permanente de la velocidad de los motores a través de una gráfica en función del
tiempo y una numeración que cambia en tiempo real.
Requena, J (2012), en su Trabajo de Grado Titulado “Diseño de un sistema de
Automatización de una planta de lavado de zanahoria de 10 t/h”, En la presente tesis
se realizó el diseño de un sistema de automatización de una Planta de lavado de
zanahoria de 10 t/h, en donde los procesos y su secuencialidad dependen de la
intervención de operarios, quienes realizan las tareas de apertura y cierre de las
compuertas, control de los tiempos en cada proceso, control del nivel de agua en las
tinas y el arranque y parada de los motores, debido a esto empleo un sistema electro
neumático y un sistema de control con PLC, que permita tener un control y
funcionamiento automático para el sistema de lavado de las zanahorias.

Camacho, H (2011) Diseño un sistema de supervisión y control centralizado
para la estación plaza monumental perteneciente a la primera etapa de la línea 1 del
metro de Valencia (VALMETRO). Los beneficios del autómata, es el que nos
permite obtener mayor facilidad al momento de detectar fallas y sencillez al momento
de introducir nuevas modificaciones.
Bases Teóricas
Se presenta la fundamentación teórica que sustenta la investigación, en la cual
serán desarrollados temas como PID (Proporcional Integral Derivativo), PLC
(Control Lógico Programable), así también como elementos de mando (motores,
contactores, relee, temporizadores, potenciómetros, pulsadores, interruptores, luces
pilotos entre otros.
Proporcional Integral Derivativo (PID)
El automatismo con PID es el uso de sistemas de control y de tecnología
electrónica para reducir la necesidad de la intervención humana en un proceso. Este sistema
electrónico posee la característica del manejo de varias variables a través de parámetros.
El algoritmo de cálculo del control PID: Se da en tres parámetros distintos:

a) Proporcional; determina la reacción del error actual. La parte proporcional
consiste en el producto entre la señal de error y la constante proporcional para
lograr que el error en estado estacionario se aproxime a cero, pero en la mayoría
de los casos, estos valores solo serán óptimos en una determinada porción del
rango total de control, siendo distintos los valores óptimos para cada porción del
rango. Sin embargo, existe también un valor límite en la constante proporcional a
partir del cual, en algunos casos, el sistema alcanza valores superiores a los
deseados. Este fenómeno se llama sobreoscilación y, por razones de seguridad, no
debe sobrepasar el 30%, aunque es conveniente que la parte proporcional ni
siquiera produzca sobreoscilación. Hay una relación lineal continua entre el valor
de la variable controlada y la posición del elemento final de control (la válvula se
mueve al mismo valor por unidad de desviación). La parte proporcional no
considera el tiempo, por lo tanto, la mejor manera de solucionar el error
permanente y hacer que el sistema contenga alguna componente que tenga en
cuenta la variación respecto al tiempo, es incluyendo y configurando las acciones
integral y derivativa.
La fórmula del proporcional está dada por:
𝑃𝑠𝑎𝑙 = 𝐾𝑝 𝑒 𝑡

El error, la banda proporcional y la posición inicial del elemento final de control
se expresan en tanto por uno. Nos indicará la posición que pasará a ocupar el
elemento final de control
Ejemplo: Cambiar la posición de una válvula (elemento final de control)
proporcionalmente a la desviación de la temperatura (variable) respecto al punto
de consigna (valor deseado) (Ver figura 1).
Figura 1
Proporcional.
b) Integral; genera una corrección proporcional a la integral del error, esto nos
asegura que aplicando un esfuerzo de control suficiente, el error de seguimiento
se reduce a cero. El modo de control Integral tiene como propósito disminuir y
eliminar el error en estado estacionario, provocado por el modo proporcional. El

control integral actúa cuando hay una desviación entre la variable y el punto de
consigna, integrando esta desviación en el tiempo y sumándola a la acción
proporcional. El error es integrado, lo cual tiene la función
de promediarlo o sumarlo por un período determinado; Luego es multiplicado por
una constante Ki. Posteriormente, la respuesta integral es adicionada al modo
Proporcional para formar el control P + I con el propósito de obtener una
respuesta estable del sistema sin error estacionario.
El modo integral presenta un desfasamiento en la respuesta de 90º que sumados a
los 180º de la retroalimentación ( negativa ) acercan al proceso a tener un retraso
de 270º, luego entonces solo será necesario que el tiempo muerto contribuya con
90º de retardo para provocar la oscilación del proceso. <<< la ganancia total del
lazo de control debe ser menor a 1, y así inducir una atenuación en la salida del
controlador para conducir el proceso a estabilidad del mismo. >>> Se caracteriza
por el tiempo de acción integral en minutos por repetición. Es el tiempo en que
delante una señal en escalón, el elemento final de control repite el mismo
movimiento correspondiente a la acción proporcional.
El control integral se utiliza para obviar el inconveniente del offset (desviación
permanente de la variable con respecto al punto de consigna) de la banda
proporcional.

La fórmula del integral está dada por:
𝐼𝑠𝑎𝑙 = 𝐾𝑖 𝑒 𝜏 𝑑𝜏𝑡
0
Ejemplo: Mover la válvula (elemento final de control) a una velocidad
proporcional a la desviación respecto al punto de consigna (variable deseada) (ver
figura 2).
Figura 2
Integral.
c) Derivativo; determina la reacción del tiempo en el que el error se produce. La
acción derivativa se manifiesta cuando hay un cambio en el valor absoluto del
error; (si el error es constante, solamente actúan los modos proporcional e
integral).
El error es la desviación existente entre el punto de medida y el valor consigna, o "Set
Point".
La función de la acción derivativa es mantener el error al mínimo corrigiéndolo
proporcionalmente con la misma velocidad que se produce; de esta manera evita que
el error se incremente.
Se deriva con respecto al tiempo y se multiplica por una constante D y luego se suma
a las señales anteriores (P+I). Es importante adaptar la respuesta de control a los
cambios en el sistema ya que una mayor derivativa corresponde a un cambio más
rápido y el controlador puede responder acordemente.
La fórmula del derivativo está dada por:
𝐷𝑠𝑎𝑙 = 𝐾𝑑
𝑑𝑒
𝑑𝑡
El control derivativo se caracteriza por el tiempo de acción derivada en minutos de
anticipo. La acción derivada es adecuada cuando hay retraso entre el movimiento de
la válvula de control y su repercusión a la variable controlada.
Cuando el tiempo de acción derivada es grande, hay inestabilidad en el proceso.
Cuando el tiempo de acción derivada es pequeño la variable oscila demasiado con

relación al punto de consigna. Suele ser poco utilizada debido a la sensibilidad al
ruido que manifiesta y a las complicaciones que ello conlleva.
El tiempo óptimo de acción derivativa es el que retorna la variable al punto de
consigna con las mínimas oscilaciones
Ejemplo: Corrige la posición de la válvula (elemento final de control)
proporcionalmente a la velocidad de cambio de la variable controlada (Ver figura 3).
Figura 3
Derivativo.
La suma de estas tres acciones es usada para ajustar al proceso de un elemento de
control como la posición de una válvula de control o la energía suministrada a un
calentador, por ejemplo. Ajustando estas tres variables en el algoritmo de control del
PID, el controlador puede proveer un control diseñado para lo que requiera el proceso

a realizar. La respuesta del controlador puede ser descrita en términos de respuesta
del control ante un error, el grado el cual el controlador llega al "set point", y el grado
de oscilación del sistema. Nótese que el uso del PID para control no garantiza control
óptimo del sistema o la estabilidad del mismo. Algunas aplicaciones pueden solo
requerir de uno o dos modos de los que provee este sistema de control. Un
controlador PID puede ser llamado también PI, PD, P o I en la ausencia de las
acciones de control respectivas. Los controladores PI son particularmente comunes,
ya que la acción derivativa es muy sensible al ruido, y la ausencia del proceso integral
puede evitar que se alcance al valor deseado debido a la acción de control. (Ver figura
4)
Figura 4
Diagrama en bloques de un control PID.

Funcionamiento
Para el correcto funcionamiento de un controlador PID que regule un proceso o
sistema se necesita, al menos:
1. Un sensor, que determine el estado del sistema (termómetro, caudalímetro,
manómetro, etc.).
2. Un controlador, que genere la señal que gobierna al actuador.
3. Un actuador, que modifique al sistema de manera controlada (resistencia
eléctrica, motor, válvula, bomba, etc.).
El sensor; proporciona una señal analógica o digital al controlador, la cual representa
el punto actual en el que se encuentra el proceso o sistema. La señal puede
representar ese valor en tensión eléctrica, intensidad de corriente
eléctrica o frecuencia. En este último caso la señal es de corriente alterna, a diferencia
de los dos anteriores, que también pueden ser con corriente continua.
El controlador; lee una señal externa que representa el valor que se desea alcanzar.
Esta señal recibe el nombre de punto de consigna (o punto de referencia), la cual es
de la misma naturaleza y tiene el mismo rango de valores que la señal que
proporciona el sensor. Para hacer posible esta compatibilidad y que, a su vez, la señal
pueda ser entendida por un humano, habrá que establecer algún tipo
de interfaz (HMI)-Human Machine Interface), son pantallas de gran valor visual y
fácil manejo que se usan para hacer más intuitivo el control de un proceso.
Ajuste de parámetros
El objetivo de los ajustes de los parámetros PID es lograr que el bucle de
control corrija eficazmente y en el mínimo tiempo los efectos de las perturbaciones;
se tiene que lograr la mínima integral de error. Si los parámetros del controlador PID
(la ganancia del proporcional, integral y derivativo) se eligen incorrectamente, el
proceso a controlar puede ser inestable, por ejemplo, que la salida de este varíe, con o
sin oscilación, y está limitada solo por saturación o rotura mecánica. Ajustar un lazo
de control significa ajustar los parámetros del sistema de control a los valores
óptimos para la respuesta del sistema de control deseada. El comportamiento óptimo
ante un cambio del proceso o cambio del "setpoint" varía dependiendo de la
aplicación. Generalmente, se requiere estabilidad ante la respuesta dada por el
controlador, y este no debe oscilar ante ninguna combinación de las condiciones del
proceso y cambio de "setpoints".
Ajuste manual
Si el sistema debe mantenerse online, un método de ajuste consiste en establecer
primero los valores de I y D a cero. A continuación, incremente P hasta que la salida

del lazo oscile. Luego establezca P a aproximadamente la mitad del valor configurado
previamente. Después incremente I hasta que el proceso se ajuste en el tiempo
requerido (aunque subir mucho I puede causar inestabilidad). Finalmente, incremente
D, si se necesita, hasta que el lazo sea lo suficientemente rápido para alcanzar su
referencia tras una variación brusca de la carga.
Un lazo de PID muy rápido alcanza su setpoint de manera veloz, un lazo de PID
no tan rápido alcanza su setpoint de manera no tan veloz. Algunos sistemas no son
capaces de aceptar este disparo brusco; en estos casos se requiere de otro lazo con un
P menor a la mitad del P del sistema de control anterior.
Limitaciones
Mientras que los controladores PID son aplicables a la mayoría de los
problemas de control, puede ser pobres en otras aplicaciones. Los controladores PID,
cuando se usan solos, pueden dar un desempeño pobre cuando la ganancia del lazo
del PID debe ser reducida para que no se dispare u oscile sobre el valor del "setpoint".
El desempeño del sistema de control puede ser mejorado combinando el lazo cerrado
de un control PID con un lazo abierto. Conociendo el sistema (como
la aceleración necesaria o la inercia) puede ser avanaccionado y combinado con la
salida del PID para aumentar el desempeño final del sistema. Solamente el valor
de avanacción (o Control prealimentado) puede proveer la mayor porción de la salida
del controlador. El controlador PID puede ser usado principalmente para responder a

cualquier diferencia o "error" que quede entre el setpoint y el valor actual del proceso.
Como la salida del lazo de avanacción no se ve afectada a la realimentación del
proceso, nunca puede causar que el sistema oscile, aumentando el desempeño del
sistema, su respuesta y estabilidad.
Por ejemplo, en la mayoría de los sistemas de control con movimiento, para
acelerar una carga mecánica, se necesita de más fuerza (o torque) para el motor. Si se
usa un lazo PID para controlar la velocidad de la carga y manejar la fuerza o torque
necesaria para el motor, puede ser útil tomar el valor de aceleración
instantánea deseada para la carga, y agregarla a la salida del controlador PID. Esto
significa que sin importar si la carga está siendo acelerada o desacelerada, una
cantidad proporcional de fuerza está siendo manejada por el motor además del valor
de realimentación del PID. El lazo del PID en esta situación usa la información de la
realimentación para incrementar o decrementar la diferencia entre el setpoint y el
valor del primero. Trabajando juntos, la combinación avanacción-realimentación
provee un sistema más confiable y estable (ver figura 5).
Figura 5
Sistema de control con movimiento

Control Lógico Programable (PLC)
El término PLC proviene de las siglas en inglés para Programmable Logic
Controler, que traducido al español se entiende como “Controlador Lógico
Programable”. Se trata de un dispositivo electrónico que puede ser programado por el
usuario y se utiliza en la industria para resolver problemas de secuencias en la
maquinaria o procesos, ahorrando costos en mantenimiento y aumentando la
confiabilidad de los equipos
Este equipo es utilizado en la ingeniería automática o automatización industrial,
para automatizar procesos electromecánicos, tales como el control de la maquinaria
de la fábrica en líneas de montaje o atracciones mecánicas.
Los PLC son utilizados en muchas industrias y máquinas. A diferencia de las
computadoras de propósito general, el PLC está diseñado para múltiples señales de
entrada y de salida, rangos de temperatura ampliados, inmunidad al ruido eléctrico y
resistencia a la vibración y al impacto. Los programas para el control de
funcionamiento de la máquina se suelen almacenar en baterías copia de seguridad o
en memorias no volátiles. Un PLC es un ejemplo de un sistema de tiempo real«duro»,
donde los resultados de salida deben ser producidos en respuesta a las condiciones de
entrada dentro de un tiempo limitado, de lo contrario no producirá el resultado
deseado (ver figura 6).

Figura 6
Sistema de control con movimiento
Los componentes principales de un PLC
a) Unidad central de proceso o control (CPU); se encarga de consultar el estado
de las entradas y de adquirir la secuencia de instrucciones (residentes en la
memoria de programas) que generan señales de salida específicas en el PLC
(ordenes que se enviaran al proceso). Durante la ejecución del programa, las
instrucciones son procesadas en serie, una tras otra. La unidad de control es la
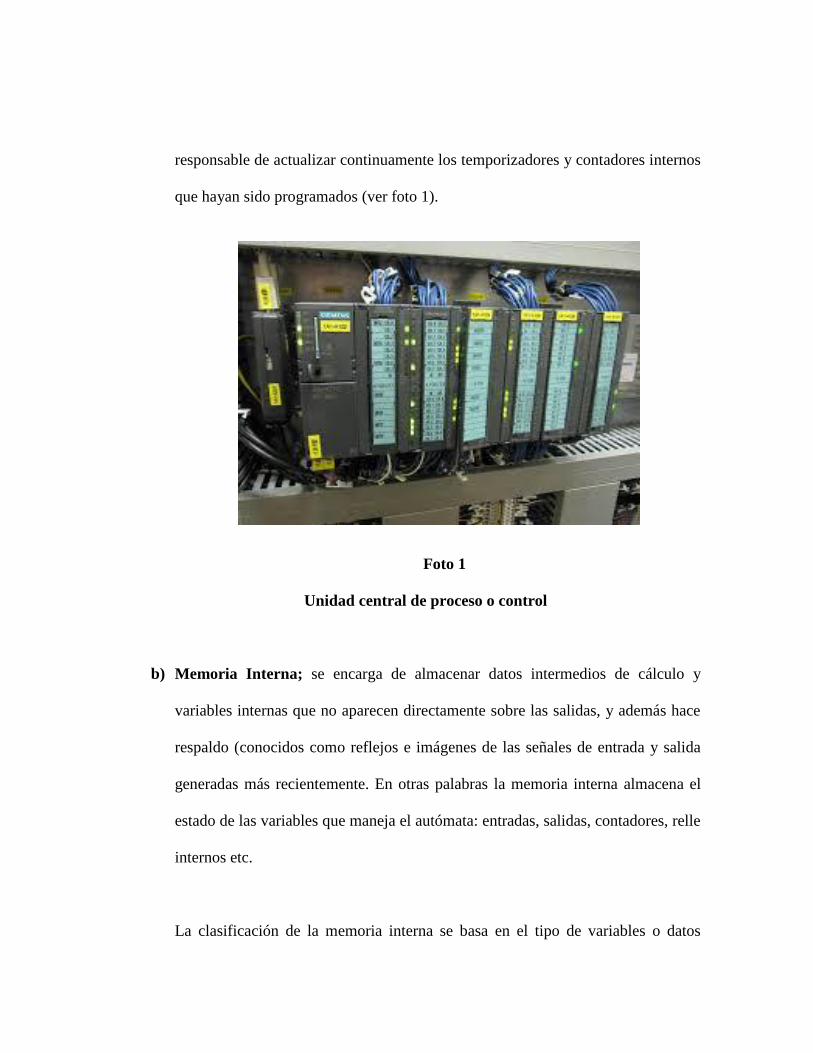
responsable de actualizar continuamente los temporizadores y contadores internos
que hayan sido programados (ver foto 1).
Foto 1
Unidad central de proceso o control
b) Memoria Interna; se encarga de almacenar datos intermedios de cálculo y
variables internas que no aparecen directamente sobre las salidas, y además hace
respaldo (conocidos como reflejos e imágenes de las señales de entrada y salida
generadas más recientemente. En otras palabras la memoria interna almacena el
estado de las variables que maneja el autómata: entradas, salidas, contadores, relle
internos etc.
La clasificación de la memoria interna se basa en el tipo de variables o datos

binarios que almacena, ya que estos pueden ser leídos de BIT a BIT, por bloques
de 8 bits (Byte) o 16 bits (word), tal y como se muestra a continuación.
Bits internos (datos binarios de 1 BIT)
Memoría imagen de entradas/salidas.
Relees internes.
Relees especiales/auxiliares
Registros internos (Datos binarios de 8 bits (byte), 16 bits (word), o más bit):
Temporizadores
Contadores
Otros registros de uso general
c) La memoria de programa: contiene la secuencia de operaciones (programa
escrito por el usuario) que deben realizarse sobre las señales de salida, asi
como los parámetros de configuración del autómata, tales como el nombre o
identificación del programa escrito, indicaciones sobre la configuración de
E/S o sobre la red de autómatas, si existe, etc. Adicionalmente puede contener
datos alfanuméricos. En caso de que haya que introducir alguna variación
sobre el sistema de control basta con modificar el contenido de esta memoria.
Este tipo de memoria normalmente es externa a la CPU.

d) Las interfaces de entradas y salidas: establecen la comunicación del
autómata con la planta. Para ello se conectan, por una parte, con las señales
del proceso y por otra parte con el bus interno del autómata. Se conoce como
bus interno al conjunto de líneas y conexiones que permiten la unión eléctrica
entre la unidad de control, las memorias y las interfaces de E/S. Un bus se
compone de un conjunto de hilos o pistas para intercambiar datos u órdenes.
El sistema de E/S de un autómata programable industrial tiene como
funciones:
1. Adaptar la tensión de trabajo de los dispositivos de campo a la de los
elementos electrónicos del autómata
2. Proporcionar una adecuada separación eléctrica entre los circuitos lógicos
y los circuitos de potencia.
e) La fuente de alimentación: proporciona a partir de una tensión exterior, las
tensiones necesarias para el buen funcionamiento de los distintos circuitos
electrónicos del sistema. En ocasiones, el autómata puede disponer de una
batería conectada a esa fuente de alimentación, lo que asegura el
mantenimiento del programa y algunos datos en las memorias en caso de
interrupción de la tensión exterior.
Los autómatas requieren al menos de dos fuentes de alimentación

Alimentación del autómata (CPU, memoria e interface)
Alimentación de los emisores de señal y de los actuadores de salida.
Generalmente la alimentación de la CPU puede ser continua a 24
Voltios Vcc, o en alterna 110 / 220 Vac. En cualquier caso, la propia
CPU alimenta las interfaces conectadas a través del bus interno. La
alimentación a los circuitos E / S usualmente puede realizarse, según el
tipo, en alterna a 48 / 110 / 220 Vac o en continua a 12 / 24 /48 Vcc.
Ventajas y desventajas de los PLC
Ventajas:
Menor tiempo d elaboración de proyecto
Posibilidad de añadir modificaciones sin costos añadidos en otros
componentes.
Mínimo espacio en otro componente.
Menor costo de mano de obra.
Mantenimiento económico.
Posibilidad de gobernar varias máquinas con el mismo autómata.
Menor tiempo de puesta en funcionamiento.
Si el autómata queda pequeño para el proceso industrial puede seguir siendo
de utilidad en otras máquinas o sistemas de producción.

Desventajas:
Adiestramiento del personal.
Costos elevados.
Lenguaje de programación LADDER
El lenguaje de programación LADDER (escalera) permite representar
gráficamente el circuito de control de un proceso dado mediante el uso simbólico de
contactos N.A y N.C, temporizadores, contadores, registros de desplazamiento,
relees, etc. Este tipo de lenguaje debe su nombre a su similitud con los diagramas
eléctricos de escalera.
El programa en lenguaje LADDER es realizado y almacenado en la memoria
del PLC (sólo en ciertos tipo de PLC que están preparados para ello) por un individuo
(programador). El PLC lee el programa LADDER de forma secuencial (hace un scan
o barrido), siguiendo el orden en que los renglones (escalones de la escalera) fueron
escritos, comenzando el renglón superior y terminando con el superior.
En este tipo de programa cada símbolo representa una variable lógica cuyo
estado puede ser verdadero o falso. Dispone de dos barras verticales que representa a
la alimentación eléctrica del diagrama, la barra vertical izquierda corresponde a un
conductor con tensión y la barra vertical derecha corresponde a la tierra o masa.

Contactor
Aparato de maniobra automático con poder de corte, y que por consiguiente
puede cerrar o abrir circuitos con carga o en vacío, Se lo define como un interruptor
accionado o gobernado a distancia por acción de un electroimán se muestra a
continuación, (ver Figura 7).
Figura 7
El Contactor
Partes del Contactor
Carcaza; soporte fabricado en material no conductor (plástico o baquelita) sobre el
cual se fijan todos los componentes del contactor.

Circuito electromagnético; está compuesto por unos dispositivos cuya finalidad es
transformar la electricidad en magnetismo, generando un campo magnético lo más
intenso posible. Propiamente constituiría el electroimán de un contactor. Está
compuesto de bobina, núcleo y armadura.
Electroimán; elemento motor del contactor, está compuesto por una serie de
elementos cuya finalidad es transformar la energía eléctrica en magnetismo,
generando un campo magnético muy intenso, el cual a su vez producirá un
movimiento mecánico.
Bobina; Es un arrollamiento de alambre, con un gran número de espiras, que al
aplicársele tensión crea un campo magnético. El flujo generado da lugar a un par
electromagnético, superior al par resistente de los muelles de la armadura,
atrayéndolo hacia el núcleo. Se construye con cobre electrolítico, arrollándolo sobre
una formaleta.
La intensidad absorbida por la bobina, al ser energizada, es relativamente
elevada, debido a que no existe en el circuito nada más que la resistencia del
conductor, por ser la reactancia mínima al tener el circuito electromagnético mucho
entrehierro. Una vez cerrado el circuito magnético (cuando el núcleo atrae la
armadura) aumenta la impedancia de la bobina, lo que reduce la corriente inicial a
una intensidad nominal baja.
La tensión de alimentación pude ser la misma del circuito de fuerza o inferiores

a ésta, reducidas por un transformador, o suministradas por otra fuente de
alimentación. Por este motivo, al elegirse un contactor, debe tomarse muy en cuenta
la tensión (y frecuencia) con que debe energizarse la bobina. Estos datos vienen
claramente registrados en ella.
La tensión que se aplica a la bobina, se realiza a través de una gran variedad de
elementos (pulsadores, contactos auxiliares, contactos de elementos auxiliares de
mando, etc.) de acuerdo a las necesidades o complejidad del circuito.
Núcleo; es una parte metálica, generalmente en forma de E. y que va fija en la
carcasa. Su función es concentrar y aumentar el flujo magnético que genera la bobina
(colocada en la parte central del núcleo), para atraer con mayor eficiencia la
armadura.
Se construye con una serie de láminas muy delgadas (chapas), ferro magnéticas
y aisladas entre sí (pero que forman un solo bloque fuertemente unido), generalmente
de hierro silicato, con la finalidad de reducir al máximo las corrientes parásitas o de
foucault (corrientes eléctrica que circulan por el núcleo al estar sometidas a una
variación de flujo magnético, originando pérdidas de energía por efecto jaule).
En los contactores cuyo circuito de mando va a ser alimentado por corriente
alterna (no así cuando se alimenta con corriente continua), el núcleo debe tener un
elemento adicional denominado espiras de sombra, espiras en cortocircuito, espiras
de Fragor o anillo de desfasaje.
Cuando circula corriente alterna por la bobina, cada vez que el flujo es cero, la

armadura se separa del núcleo dos veces por segundo, porque el flujo magnético
producido por la bobina es también dos veces cero. En realidad como el tiempo es
muy pequeño (1/120 de segundo cuando la frecuencia es 60 Hz), es imposible que la
armadura se separe completamente del núcleo, pero es suficiente para que se origine
un zumbido y vibración, que de ser continúa estropearán el contactor.
Para evitar este inconveniente se colocan en las dos columnas laterales del
núcleo las espiras de sombra (construidas en cobre), para suministrar al circuito
magnético un flujo cuando la bobina no lo produce, creando en consecuencia un flujo
magnético constante, similar al que puede producir la corriente continua. A
continuación se muestran las parte internas del contactor (ver Figura 8)
Figura 8
Partes internas del contactor
Armadura: Elemento similar al núcleo, en cuanto a su construcción, pero que a
diferencia de éste es una parte móvil, cuya finalidad principal es cerrar el circuito

magnético, cuando se energice la bonina, porque en estado de reposo debe estar
separada del núcleo. Se aprovecha de esta propiedad de movimiento que tiene para
colocar sobre él una serie de contactos (parte móvil del contacto) que se cerrarán o
abrirán siempre que la armadura se ponga en movimiento. La armadura debe está
cubierta por un material aislante, para evitar que los diferentes contactos que se
coloquen queden eléctricamente unidos.
Potenciómetro
Permite controlar la intensidad de corriente que fluye por un circuito si se
conecta en paralelo, o la diferencia de potencial al conectarlo en serie, se utilizan en
circuitos de poca corriente. Para circuitos de corrientes mayores, se utilizan
los reóstatos, que pueden disipar más potencia (Ver figura 9).
Figura 9
Potenciómetro.
Según su aplicación se distinguen varios tipos:

Potenciómetros de Mando; son adecuados para su uso como elemento de control
en los aparatos electrónicos. El usuario acciona sobre ellos para variar los
parámetros normales de funcionamiento. Por ejemplo, el volumen de una radio.
Potenciómetros de ajuste; controlan parámetros prea justados, normalmente en
fábrica, que el usuario no suele tener que retocar, por lo que no suelen ser
accesibles desde el exterior. Existen tanto encapsulados en plástico como sin
cápsula, y se suelen distinguir potenciómetros de ajuste vertical, cuyo eje de giro
es vertical, y potenciómetros de ajuste horizontal, con el eje de giro paralelo al
circuito impreso.
Según la ley de variación de la resistencia:
𝑅 = 𝜌 𝜃
Potenciómetros lineales: La resistencia es proporcional al ángulo de giro.
Generalmente denominados con una letra B.
Logarítmicos. La resistencia depende logarítmicamente del ángulo de giro.
Generalmente denominados con una letra A.
Senoidales: la resistencia es proporcional al seno del ángulo de giro. Dos
potenciómetros senoidales solidarios y girados 90° proporcionan el seno y el
coseno del ángulo de giro. Pueden tener topes de fin de carrera o no.
Antilogarítmicos: generalmente denominados con una letra F.
En los potenciómetros impresos la ley de resistencia se consigue variando la
anchura de la pista resistiva, mientras que en los bobinados se ajusta la curva a
tramos, con hilos de distinto grosor.
Potenciómetros multivuelta: Para un ajuste fino de la resistencia existen
potenciómetros multivuelta, en los que el cursor va unido a un tornillo
desmultiplicador, de modo que para completar el recorrido necesita varias vueltas
del órgano de mando.
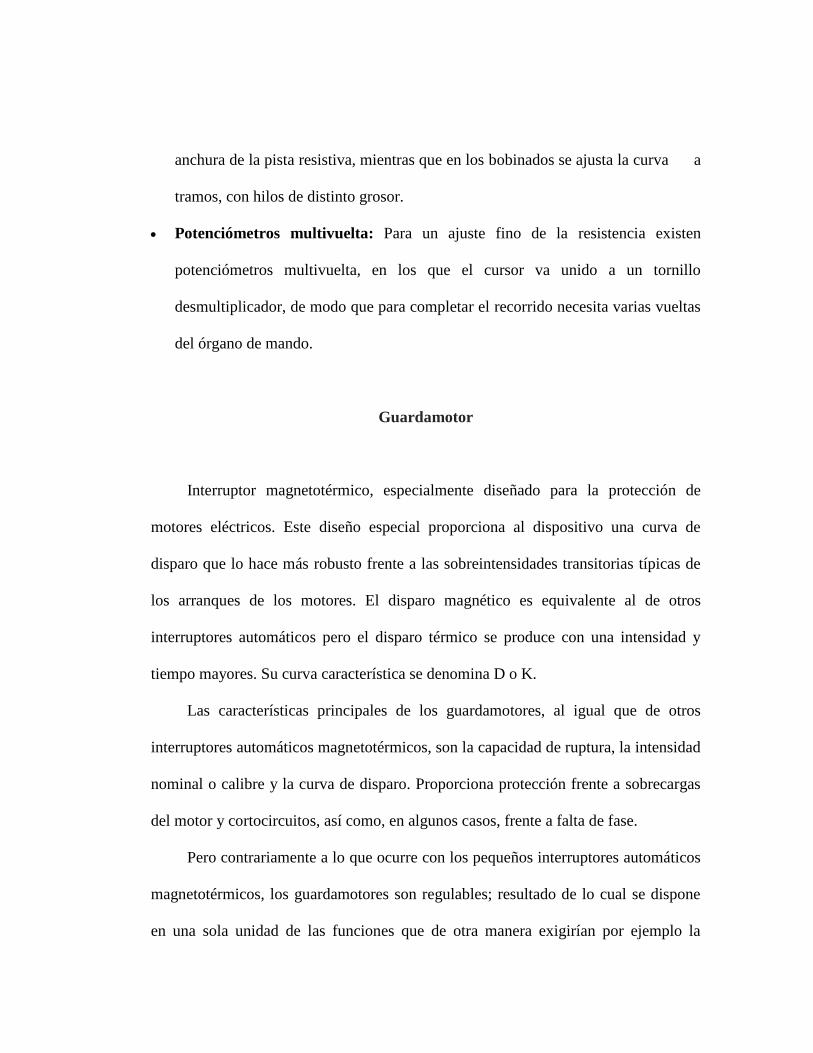
Guardamotor
Interruptor magnetotérmico, especialmente diseñado para la protección de
motores eléctricos. Este diseño especial proporciona al dispositivo una curva de
disparo que lo hace más robusto frente a las sobreintensidades transitorias típicas de
los arranques de los motores. El disparo magnético es equivalente al de otros
interruptores automáticos pero el disparo térmico se produce con una intensidad y
tiempo mayores. Su curva característica se denomina D o K.
Las características principales de los guardamotores, al igual que de otros
interruptores automáticos magnetotérmicos, son la capacidad de ruptura, la intensidad
nominal o calibre y la curva de disparo. Proporciona protección frente a sobrecargas
del motor y cortocircuitos, así como, en algunos casos, frente a falta de fase.
Pero contrariamente a lo que ocurre con los pequeños interruptores automáticos
magnetotérmicos, los guardamotores son regulables; resultado de lo cual se dispone
en una sola unidad de las funciones que de otra manera exigirían por ejemplo la

instalación de al menos tres unidades a saber: interruptor, contactor y relevo térmico
(ver foto 2).
Foto 2
Guardamotor.
Elementos de Mando
Son todos aquellos aparatos que actúan accionados por el operario. Los más
importantes son los pulsadores, selectores, manipuladores. Se tiene una gran variedad
de ellos, tanto por su apariencia y forma exterior, como por la función que van a
realizar.
Pulsadores

1. Rosantes: que impiden maniobras involuntarias
2. Saliente: de accionamiento más cómodo. Son los más usados
3. De llave: para accionamiento de gran responsabilidad
4. De seta: para accionamientos en situación de emergencia
5. Luminosos: con señalización incorporada.
Selectores o interruptores giratorios
Se encuentran a su vez en variedad de formas: simples, de maneta, de llave, etc.
Según los pulsadores y selectores mencionados se muestran alguno de esto, (Ver foto
3).
Foto 3
Tipos de pulsadores y selectores
Por la Función que Realicen
Todos los elementos citados cumplen más o menos con las mismas funciones: abrir y
cerrar circuitos. De allí que cualquiera de ellos pueden clasificarse en:
1. Normalmente cerrado (NC): para abrir un circuito
2. Normalmente abierto (NA): para cerrar un circuito
3. De desconexión múltiple: para abrir varios circuitos independientes
4. De conexión múltiple: para cerrar varios circuitos independiente
5. De conexión-desconexión: para abrir un circuito y cerrar otro al mismo tiempo
6. De conexión-desconexión múltiple: para abrir y cerrar varios circuitos
contemporáneamente.
Respecto a los de conexión-desconexión (sencilla múltiple) debemos tener un
cuidado especial por cuanto la apertura y cierre de los circuitos pueden efectuarse de
diferentes maneras.
Relés de Tiempo o Temporizadores
Estos aparatos cierran o abren determinados contactos (contactos temporizados) al
cabo de un tiempo, debidamente establecido, de haberse abierto o cerrado su circuito
de alimentación. Es muy importante no confundir los contactos temporizados con los
contactos auxiliares no temporizados que puede tener un temporizador, y que
actuarán tan pronto se energice éste, tales como se muestra a continuación, (Ver foto

4).
Foto 4
Tipos de temporizadores
Existen dos Grupos de Temporizadores
1. Al trabajo: si sus contactos temporizados actúan después de cierto tiempo de
haber sido energizado.
2. Al reposo: sus contactos temporizados actuarán solamente después de cierto
tiempo de que el temporizador haya sido desenergizado.
Los Temporizadores, Según la Técnica de Construcción y Funcionamiento, pueden
Ser:
1. Temporizadores con mecanismo de relojería: cuando el retardo se consigue por
un mecanismo de relojería, a base de engranajes, que actúan accionados por un
pequeño motor, con embargue electromagnético, de manera que al cabo de cierto
tiempo de funcionamiento del motor, entra en acción el embrague y se produce la
apertura o cierre del circuito de mando.
2. Temporizadores electrónicos: sistemas basados en circuitos electrónicos y que
presentan una gama muy extensa en cuanto a valores y precisión de tiempo. Su uso se
ha ido extendiendo rápidamente, especialmente en aquellos dispositivos en los cuales
la precisión es fundamental.
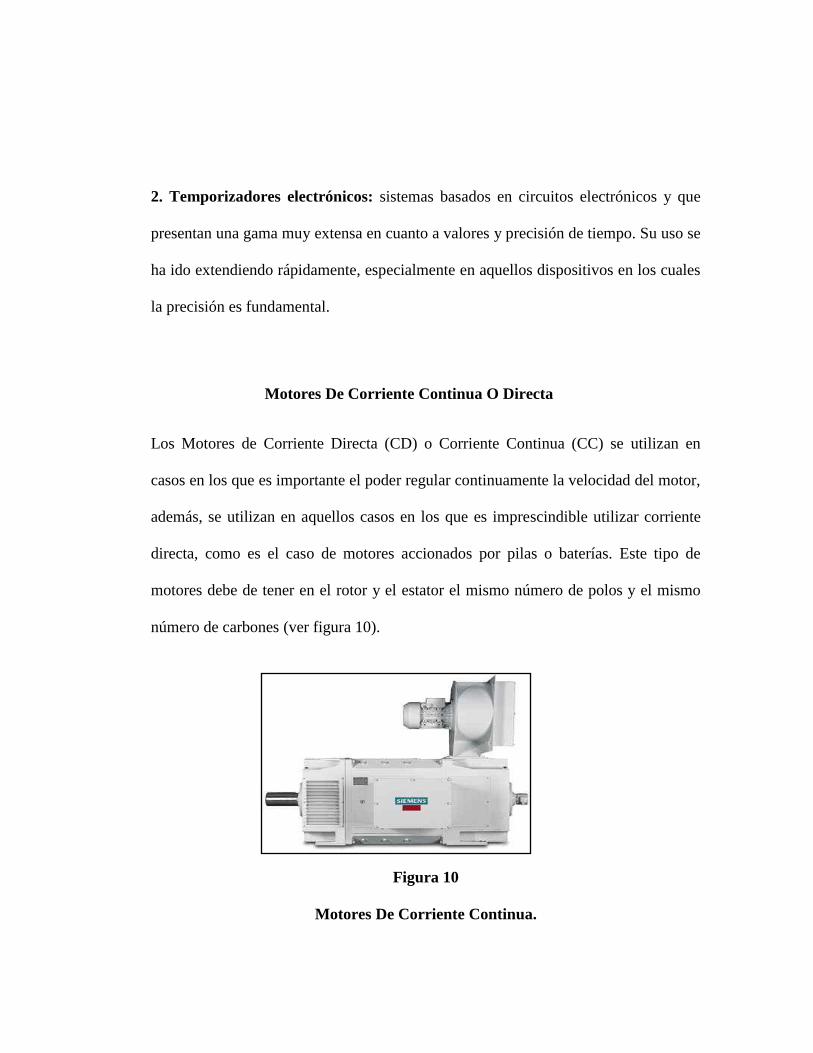
Motores De Corriente Continua O Directa
Los Motores de Corriente Directa (CD) o Corriente Continua (CC) se utilizan en
casos en los que es importante el poder regular continuamente la velocidad del motor,
además, se utilizan en aquellos casos en los que es imprescindible utilizar corriente
directa, como es el caso de motores accionados por pilas o baterías. Este tipo de
motores debe de tener en el rotor y el estator el mismo número de polos y el mismo
número de carbones (ver figura 10).
Figura 10
Motores De Corriente Continua.

Los motores de corriente directa pueden ser de tres tipos:
• Serie; tipo de motor eléctrico de corriente continua en el cual el inducido y el
devanado inductor o de excitación van conectados en serie. El voltaje aplicado es
constante, mientras que el campo de excitación aumenta con la carga, puesto que la
corriente es la misma corriente de excitación. El flujo aumenta en proporción a la
corriente en la armadura, como el flujo crece con la carga, la velocidad cae a medida
que aumenta esa carga, (ver figura 11).
Figura 11
Motores De Corriente Continua En Serie.
Las principales características de este motor son:
Se embala cuando funciona en vacío, debido a que la velocidad de un motor de
corriente continua aumenta al disminuir el flujo inductor y, en el motor serie, este
disminuye al aumentar la velocidad, puesto que la intensidad en el inductor es la
misma que en el inducido.
La potencia es casi constante a cualquier velocidad.
Le afectan poco la variaciones bruscas de la tensión de alimentación, ya que un
aumento de esta provoca un aumento de la intensidad y, por lo tanto, del flujo y
de la fuerza contraelectromotriz, estabilizándose la intensidad absorbida.
• Paralelo; motor eléctrico de corriente continua cuyo bobinado inductor principal
está conectado en derivación o paralelo con el circuito formado por los bobinados
inducido e inductor auxiliar.
Al igual que en las dinamos shunt, las bobinas principales están constituidas por
muchas espiras y con hilo de poca sección, por lo que la resistencia del bobinado
inductor principal es muy grande.
En el instante del arranque, el par motor que se desarrolla es menor que en el motor
serie (también uno de los componentes del motor de corriente continua). Al disminuir
la intensidad absorbida, el régimen de giro apenas sufre variación.
Es el tipo de motor de corriente continua cuya velocidad no disminuye más que
ligeramente cuando el par aumenta. Los motores de corriente continua en derivación
son adecuados para aplicaciones en donde se necesita velocidad constante a cualquier
ajuste del control o en los casos en que es necesario un rango apreciable de
velocidades (por medio del control del campo).
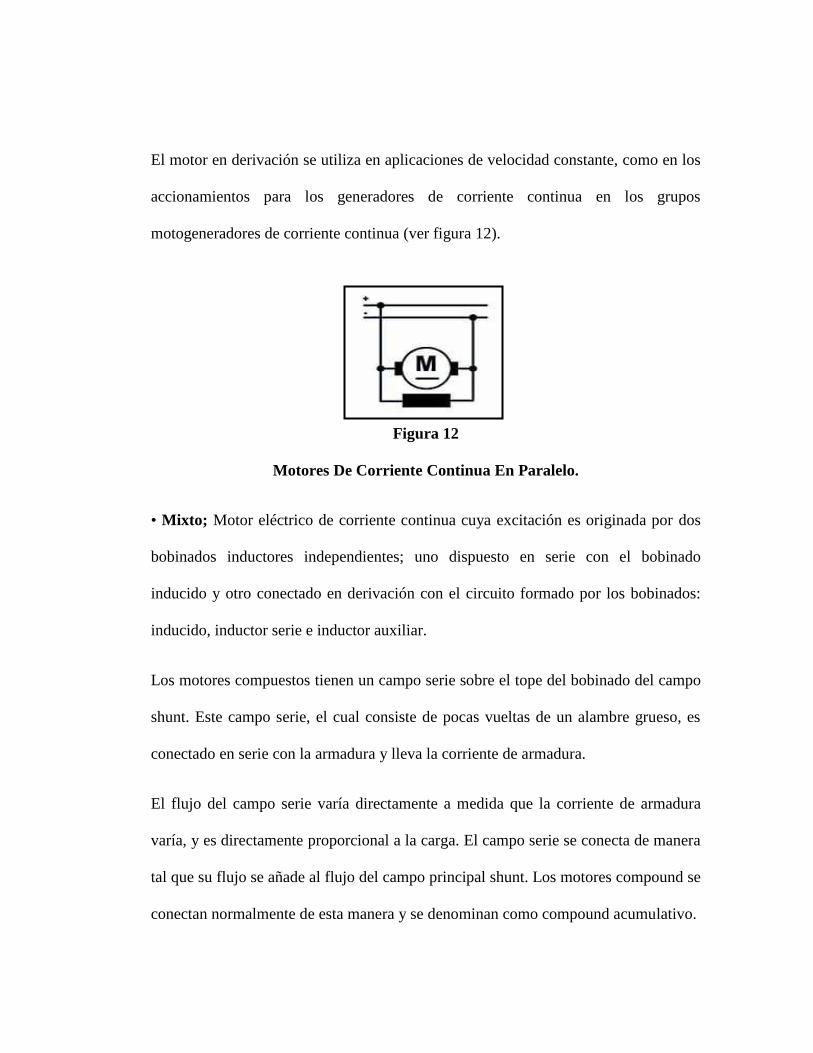
El motor en derivación se utiliza en aplicaciones de velocidad constante, como en los
accionamientos para los generadores de corriente continua en los grupos
motogeneradores de corriente continua (ver figura 12).
Figura 12
Motores De Corriente Continua En Paralelo.
• Mixto; Motor eléctrico de corriente continua cuya excitación es originada por dos
bobinados inductores independientes; uno dispuesto en serie con el bobinado
inducido y otro conectado en derivación con el circuito formado por los bobinados:
inducido, inductor serie e inductor auxiliar.
Los motores compuestos tienen un campo serie sobre el tope del bobinado del campo
shunt. Este campo serie, el cual consiste de pocas vueltas de un alambre grueso, es
conectado en serie con la armadura y lleva la corriente de armadura.
El flujo del campo serie varía directamente a medida que la corriente de armadura
varía, y es directamente proporcional a la carga. El campo serie se conecta de manera
tal que su flujo se añade al flujo del campo principal shunt. Los motores compound se
conectan normalmente de esta manera y se denominan como compound acumulativo.

Esto provee una característica de velocidad que no es tan “dura” o plana como la del
motor shunt, ni tan “suave” como la de un motor serie. Un motor compound tiene un
limitado rango de debilitamiento de campo; la debilitación del campo puede resultar
en exceder la máxima velocidad segura del motor sin carga. Los motores de corriente
continua compound son algunas veces utilizados donde se requiera una respuesta
estable de par constante para un rango de velocidades amplio.
El motor compound es un motor de excitación o campo independiente con
propiedades de motor serie. El motor da un par constante por medio del campo
independiente al que se suma el campo serie con un valor de carga igual que el del
inducido. Cuantos más amperios pasan por el inducido más campo serie se origina,
claro está, siempre sin pasar del consumo nominal (ver figura 12).
Figura 12
Motores De Corriente Continua Mixto.

Glosario de Términos Básicos
Bit: Digito del sistema binario de numeración
Circuito: Conjunto completo de componentes electrónicos y sus interconexiones.
Contactor: Es un componente electromecánico que tiene por objetivo establecer o
interrumpir el paso de corriente.
Contacto auxiliar: Se utilizan para el funcionamiento de circuitos auxiliares y
circuitos de control.
Contacto normalmente abierto (NA o NO): Su función es cerrar un circuito
eléctrico tan pronto se energice la bobina del contactor o rele que lo contiene. En el
estado de reposo permanece abierto.
Contacto normalmente cerrado (NC): Su función es abrir un circuito eléctrico tan
pronto se energice la bobina del contactor o relé que lo contiene. En el estado de
reposo permanece cerrado.
Control: Es la unidad central del sistema, su función es reconocer el estado actual del
proceso a través de las entradas que recibe, busca en el programa las instrucciones
necesarias para la continuación óptima del proceso y da órdenes a las salidas para que
el proceso se desarrolle perfectamente.
Controlador: Instrumento o equipo que recibe la información de la variable de
proceso, la compara con un valor prefijado llamado SET POINT para luego tomar
acciones para manipular la variable de proceso, para mantenerla alrededor del valor
prefijado.
Datos: Información de cualquier tipo incluyendo números binarios decimales y
hexadecimales, enteros, cadena de caracteres y otras.
Diagrama de Bloques: Diagrama simplificado de un sistema electrónico en el que se
muestran las etapas como cajas bidireccionales omitiendo el cableado y los circuitos
de forma detallada.
Dispositivo: Es un elemento eléctrico o manual, que posee una función o misión
determinada con un mecanismo de funcionamiento y establecido.
Entradas: Son todas las señales necesarias para conocer el estado actual de los
procesos. Estas señales deben venir debidamente acondicionadas para que el equipo
las pueda entender.
Hardware: Es todo el equipo (electrónico o electromecánico) que conforman un
sistema.
Lenguaje escalera: Lenguaje ampliamente utilizado para programar a los PLC’s. Se
caracteriza por utilizar una lógica de contactos en lugar de instrucciones de
programación.
Plc: Es un controlador lógico programable.
Proceso: Engloba las funciones realizadas por el equipo en el cual es controlada la
variable sin incluir los instrumentos.
Programa: Es la parte del sistema de control en la que se encuentra las instrucciones
necesarias para controlar el proceso. Estas instrucciones residen en la memoria del

controlador y pueden ser modificadas
Pulsadores: Es un dispositivo utilizado para activar alguna función el cual permite el
paso o interrupción de la corriente mientras es accionado.
Relé: Es un dispositivo electromecánico que funciona como un interruptor controlado
por un circuito eléctrico en el que, por medio de una bobina y un electroimán, se
acciona un juego de uno o varios contactos que permiten abrir o cerrar otros circuitos
eléctricos independientes.
Salidas: Constituyen la parte del controlador encargado de pasar las ordenes que
recibe del control al proceso y además de dar información sobre el proceso al
personal de operación.
Software: Es el conjunto de programas y datos que manipula un sistema
computarizado.
Sistema de Control: Es un ordenamiento de componentes físicos conectados de tal
manera que el mismo puede comandar, dirigir o regularse así mismo.





























