
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Une nouvelle approche non parametrique pourestimer la fonction de regression spatiale
Camille Ternynck
Laboratoire EQUIPPE - Universite Lille 3
Seminaire ”Modeles aleatoires et applications”,a l’universite de Caen, le 16 Septembre 2014
avec Sophie Dabo-Niang et Anne-Francoise Yao
1 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Plan de l’expose
Motivations
ModelisationEtat de l’artNotre approche
ApplicationsSimulationsDonnees reelles
Extension
Conclusion et perspectives
Bibliographie
2 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Motivations
Motivations
3 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Motivations
Objectif
Prevision spatiale:
§ observation de phenomenes sur des ensembles spatiaux;
§ prediction en des sites non-observes.
Etape preliminaire: estimation de la fonction rp¨q du modele de regressionsuivant
Y “ rpX q ` ε
ou Y P R, X P Rd et ε est l’erreur aleatoire.
Ñ estimation a partir de l’echantillon d’un processus spatial pZi, i P ZNq,N ě 1, Zi “ pXi,Yiq de meme loi que pX ,Y q.
i “ pi1, . . . , iNq (site)
4 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Motivations
En pratique
Recolter des donnees coute cher Ñ besoin de ces methodes dans demultiples domaines ou les donnees sont localisees dans un espacemulti-dimensionnel.
Par exemple en epidemiologie, meteorologie, econometrie, archeologie,traitement d’images, . . .
5 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Motivations
Caracteristiques
Observations spatialement dependantes‰ dependance temporelle (notions de passe, present, futur)
ë theories de statistique temporelle non adaptees aux donnees spatiales
Difficulte: pas de relation d’ordre naturel
Soit In un ensemble spatial.Champ aleatoire Z sur In: donnee d’une collection Z “ tZi, i P Inu dev. a. indexees par In.
Donnees spatiales = realisations de champs aleatoires.
6 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Motivations
Trois types de donnees spatiales (suivant la nature de In):
1. donnees latticielles sur un reseau In discret;
2. processus ponctuels spatiaux;
3. donnees geostatistiques;§ In est un sous-espace continu de Rd
§pn sites i1, . . . , in sont echantillonnes (avec pn :“ n1 ˆ . . . ˆ nN)
methodes parametriques, tres developpees et utilisees, en particulierles methodes de krigeage
methodes non parametriques, plus recentes (Tran 1990) et au coeurd’une dynamique de rechercheë cadre de ce travail
7 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Motivations
Trois types de donnees spatiales (suivant la nature de In):
1. donnees latticielles sur un reseau In discret;
2. processus ponctuels spatiaux;
3. donnees geostatistiques;§ In est un sous-espace continu de Rd
§pn sites i1, . . . , in sont echantillonnes (avec pn :“ n1 ˆ . . . ˆ nN)
methodes parametriques, tres developpees et utilisees, en particulierles methodes de krigeage
methodes non parametriques, plus recentes (Tran 1990) et au coeurd’une dynamique de rechercheë cadre de ce travail
7 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Modelisation
8 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Etat de l’art
Methode parametrique: Krigeage / Cokrigeage
Prediction (ou Krigeage) de Zi0 :
§ chercher le predicteur ”BLUP” de Zi0 , a partir de Z “ pZi1 , . . . ,Zinq;
§ necessite l’estimation du variogramme de Z ;
§ ne donne pas de resultats satisfaisants sur des donnees non normales.
Quelques references: Matheron (1962), Ripley (1981), Cressie (1993),Goovaerts (1997), etc.
9 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Etat de l’art
Methodes non parametriques
Soit un processus spatial pZi “ pXi,Yiq P Rd ˆ R, i P ZNq, observe surl’ensemble discret
In “
i P ZN , 1 ď ik ď nk , k “ 1, . . . ,N(
§ les Zi admettent une densite inconnue, fX ,Y par rapport a la mesurede Lebesgue sur Rd`1;
§ les Xi admettent une densite f ;
§ la fonction de regression de Y sur X est definie par
rnpxq “
"
ϕpxq{f pxq si f pxq ‰ 0;EpY q sinon,
ou ϕpxq “ş
R yfX ,Y px , yqdy avec y P R et x P Rd .
10 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Etat de l’art
Methodes non parametriques
Soit un processus spatial pZi “ pXi,Yiq P Rd ˆ R, i P ZNq, observe surl’ensemble discret
In “
i P ZN , 1 ď ik ď nk , k “ 1, . . . ,N(
§ les Zi admettent une densite inconnue, fX ,Y par rapport a la mesurede Lebesgue sur Rd`1;
§ les Xi admettent une densite f ;
§ la fonction de regression de Y sur X est definie par
rnpxq “
"
ϕpxq{f pxq si f pxq ‰ 0;EpY q sinon,
ou ϕpxq “ş
R yfX ,Y px , yqdy avec y P R et x P Rd .
10 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Etat de l’art
Methodes non parametriques - Estimateurs a noyau
Estimation de la fonction de densite:Tran (1990), Carbon, Tran et Wu (1997), Biau (2003), El Machkouri(2011), Dabo-Niang et Yao (2013), . . .
Estimation de la fonction de regression:Biau et Cadre (2004), Carbon, Francq et Tran (2007), Dabo-Niang etYao (2007), Menezes, Garcıa-Soidan et Ferreira (2010), Dabo-Niang,Rachdi et Yao (2011), Wang, Wang et Huang (2012), . . .
11 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Etat de l’art
Estimation classique a noyau de f p¨q et rp¨qA partir des observations tpXi,Yiq, i P Inu, on a pour x P Rd :
rnpxq “
"
ϕnpxq{fnpxq si fnpxq ‰ 0;1pn
ř
iPInYi sinon,
avec
ϕnpxq “1
pnhdn
ÿ
kPIn
YkK
ˆ
x ´ Xk
hn
˙
et
fnpxq “1
pnhdn
ÿ
kPIn
K
ˆ
x ´ Xk
hn
˙
§ K noyau defini sur Rd , a support compact et a valeurs dans R
§ limnÑ8 hn “ 0p`q: fenetre
§pn :“ n1 ˆ . . .ˆ nN (taille de l’echantillon)
12 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Etat de l’art
Remarques
Dans certaines situations, on s’attend a ce que les estimateurs tiennentcompte de la position des sites d’observation.
Champ simulé
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
Sites inconnus et à prédire
●
●
●●
●
●●
●●
●●
●
●
●
●
●●
●
●
●●
●
●●
●
●●
●
●
●●
●●
●
●
●
●
●
●
●
●●●
●
●●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●●
●●
●
●
●●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●●●
●
●
●
●●
●
●●●●
●
●
●
●
●
●
●
●
●
●
●●●
●
●
●
●●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●●
●●
●
●
●
●
●●
●
●●
●
●
●●
●
●
●●
●
●●
●●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●●
●●●
●
●●
●
●
●●
●
●●●
●
●
●
●●●●
●
●●●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●
●
●
●
●
●●●●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●●
●
●
●
●●
●
●
●
●
●●●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
Champ simulé
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●
Sites inconnus et à prédire
●
●
●●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●●
●●
●
●
●
●
●●
●
●●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●●●
●●
●
●
●
●
●●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●●●
●
●
●
●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●●
●●
●
●
●●
●
●
●
●
●●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●
●●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●●
●●●
●
●
●●
●
●
●
●●
●
●
●
●●
●●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●
●
●
●●●●
●
●
●
●
●
●●●●
●
●
●
●
●
●
●
●●
●
●●
●●●
●
●●●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●●
●
●
●
●●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●●●●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●●
●
●
●
●●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
”Everything is related to everything else,but near things are more related than distant things.”
Tobler (1979)
13 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Notre approche en quelques mots
Basee sur le produit de 2 noyaux:
l’un sur les observations
l’autre sur la positions des sites
Idee introduite dans Hall, Muller et Wu (2006), Wang et Wang (2009),Wang, Wang et Huang (2012), Dabo, Hamdad, Ternynck et Yao (2014),Ternynck (2014), . . .
14 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
”Time-Dynamic Density” - Hall, Muller et Wu (2006)
Ñ estimateur a noyaux de la densite lorsque la distribution multivarieequi genere les donnees evolue avec le temps
Ñ utilise les donnees a partir d’une fenetre ”historique” du temps etdonc les donnees des distributions passees
Soit tXiu une sequence de variables aleatoires multivariees i.i.d. ouXi P Rp est observee au temps ti , avec 1 ď i ď n.
L’estimation de la densite au point x P Rp et au temps t est donnee par
pf px , tq “1
thpλ
ÿ
1ďtiďt
KT
ˆ
t ´ tiλ
˙
KS
ˆ
x ´ Xi
h
˙
, 1 ď i ď n
15 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Nouvelle estimation de f p¨q (Dabo et al (2014))
On note sj “jn (Ñ site normalise).
Pour chaque x P Rd fixee, localisee en j P In (notee xj) :
fnpxjq “1
pnbdnρ
Nn
ÿ
iPIn
K1
ˆ
xj ´ Xi
bn
˙
K2
ˆ
}sj ´ si}
ρn
˙
ou
§ K1 et K2: noyaux definis resp. sur Rd et R et a valeurs dans R
§ limnÑ8 bn “ 0p`q et limnÑ8 ρn “ 0p`q: fenetres
16 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Nouvelle estimation de rp¨q
A partir de l’estimation precedente de f , pour chaque x P Rd fixee,localisee en j P In et denotee xj, l’estimateur a noyau de rp¨q, est definipar
rnpxjq “
$
&
%
ϕnpxjq{fnpxjq si fnpxjq ‰ 0;1
pn
ÿ
iPIn
Yi sinon,
avec
ϕnpxjq “1
pnbdnρ
Nn
ÿ
iPIn
YiK1
ˆ
xj ´ Xi
bn
˙
K2
ˆ
}sj ´ si}
ρn
˙
17 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Condition de melange
Pour mesurer la dependance, on suppose que le champ Z estα-melangeant. Soient σpSq “ tZu,u P Su et σpS 1q “ tZu1 ,u1 P S 1u deuxσ-algebres, on definit
αpvq “ supu,u1PRN ,}u´u1}“v
αpσpSq, σpS 1qq, v ě 0
ouαpσpSq, σpS 1qq “ sup
APσpSq,BPσpS 1q
|PpAX Bq ´ PpAqPpBq|
et on alimvÑ8
αpvq “ 0
18 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Conditions de regularite
A1: fX ,Y et f sont continues sur Rd`1 et Rd resp.
A2: f p¨q et rp¨q sont Lipschitziennes
Conditions sur les noyaux
A3: K1p¨q et K2p¨q sont des noyaux bornes et integrables sur R. Et K1p¨q
satisfait des conditions de Lipschitz.
A4: D C1i et C2i avec 0 ă C1i ă C2i ă 8, pour i “ 1, 2, telles que
C111r0,1sps1sq ď K1psq ď C211r0,1sps
1sq pour s P Rd
C121r0,1sptq ď K2ptq ď C221r0,1sptq pour t P R
ou s 1 denote la transposee de s.
Condition de dependance locale
A5: la densite de probabilite conjointe fXi,Xj de pXi,Xjq existe, est bornee
et @u, v P Rd , DC ą 0,
|fXi,Xjpu, vq ´ fXipuqfXjpvq| ă C
A6/A7: hypotheses sur les coefficients de melange19 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Resultats de convergence
Sous les conditions A1-A7
Theoreme 1: rnp¨q converge presque completement vers rp¨q et
|rnpxjq ´ rpxjq| “ O
˜
bn `
d
log pn
pnbdnρ
Nn
¸
p.c.
Theoreme 2: rnp¨q converge en moyenne d’ordre q (q ą 1) vers rp¨q et
}rnpxjq ´ rpxjq}q “ O
˜
bn `
d
1
pnbdnρ
Nn
¸
20 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
Un modele de prediction spatiale
Soit un processus spatial pXi,Yiq observe sur On Ă In.On souhaite predire Yi0 sachant Xi0 en un site i0 R On.Pour cela, on utilise l’estimateur de la fonction de regression
pYi0 “ rnpXi0q “
ř
iPOnYiK1
´
Xi0´Xi
bn
¯
K2,ρnp}i0 ´ i}q
ř
iPOnK1
´
Xi0´Xi
bn
¯
K2,ρnp}i0 ´ i}q
Remarque: Si on dispose d’un seul processus Y “ pYiq, observe encertains sites i P On et a predire en d’autres sites i0 R On, on pose Xi unvecteur de d composantes issues de Yi (e.g. les plus proches voisins)
21 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Modelisation
Notre approche
i
Yi
Xi
22 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Applications
23 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
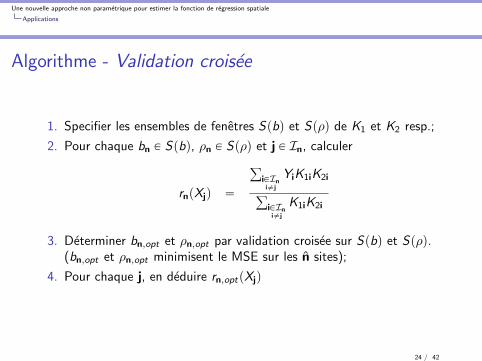
Algorithme - Validation croisee
1. Specifier les ensembles de fenetres Spbq et Spρq de K1 et K2 resp.;
2. Pour chaque bn P Spbq, ρn P Spρq et j P In, calculer
rnpXjq “
ř
iPIni‰j
YiK1iK2i
ř
iPIni‰j
K1iK2i
3. Determiner bn,opt et ρn,opt par validation croisee sur Spbq et Spρq.(bn,opt et ρn,opt minimisent le MSE sur les n sites);
4. Pour chaque j, en deduire rn,optpXjq
24 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Simulations
Champs simules: N “ 2 et d “ 3
Ypi,jq “ sin´
Xp1qpi,jq ` X
p2qpi,jq ` X
p3qpi,jq
¯
` εpi,jq
avec ε “ pεpi,jqq “ GRF p0, 0.01, 3q et
Xpdqpi,jq “ Dpi,jq
ˆ
2
M
˙1{2 Mÿ
k“1
cospwp1, kqi ` wp2, kqj ` qpkqtd ` rpkqq,
ou t1 “ 1, t2 “ 5 and t3 “ 9. Pour g “ 1, 2 et k “ 1, . . . ,M, wpg , kq etqpkq sont iid N p0, 0.5q, independants de rpkq iid Ur´π, πs.D assure la condition de melange spatial : plus a est grand, plus faibleest la dependance spatiale.
25 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Simulations
Un exemple de variable X simulee
5 10 15 20 25 30 35
510
1520
2530
x1
5 10 15 20 25 30 35
510
1520
2530
x2
5 10 15 20 25 30 35
510
1520
2530
x3
Figure : Champ X d (d “ 3) simule, pour une taille de grille pn “ 1050 et unevaleur de a “ 2
26 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Simulations
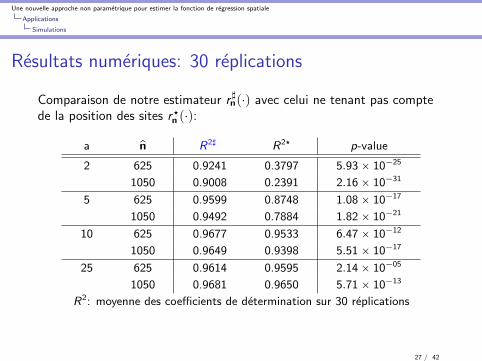
Resultats numeriques: 30 replications
Comparaison de notre estimateur r 7np¨q avec celui ne tenant pas comptede la position des sites r‹n p¨q:
a pn R27 R2‹ p-value
2 625 0.9241 0.3797 5.93 ˆ 10´25
1050 0.9008 0.2391 2.16 ˆ 10´31
5 625 0.9599 0.8748 1.08 ˆ 10´17
1050 0.9492 0.7884 1.82 ˆ 10´21
10 625 0.9677 0.9533 6.47 ˆ 10´12
1050 0.9649 0.9398 5.51 ˆ 10´17
25 625 0.9614 0.9595 2.14 ˆ 10´05
1050 0.9681 0.9650 5.71 ˆ 10´13
R2: moyenne des coefficients de determination sur 30 replications
27 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Simulations
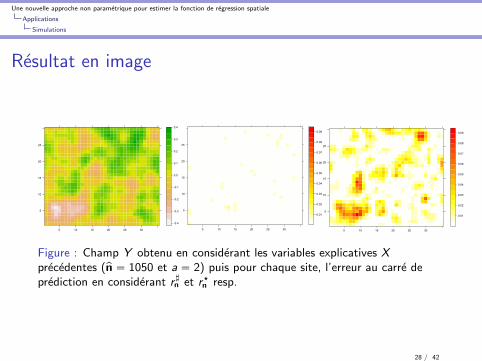
Resultat en image
5
10
15
20
25
5 10 15 20 25 30
-0.4
-0.3
-0.2
-0.1
0.0
0.1
0.2
0.3
0.4
5
10
15
20
25
5 10 15 20 25 30
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
5
10
15
20
25
5 10 15 20 25 30
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
Figure : Champ Y obtenu en considerant les variables explicatives Xprecedentes (pn “ 1050 et a “ 2) puis pour chaque site, l’erreur au carre deprediction en considerant r 7n et r‹n resp.
28 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Donnees reelles
Illustration: Jura Suisse
Enjeu: determiner les surfaces contaminees afin d’empecher, par exemple,de cultiver ces sols ou de les habiter.
?
??
?
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
??
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
? ?
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
??
?
?
?
?
?
?
?
? ?
?
?
?
?
?
?
? ?
?
? ?
?
?
?
?
?
§ region de 14,5 km2
§ concentration en metaux lourdsdans le sol
§ 259 sites d’observation
§ 100 sites a predire
Donnees collectees par l’Ecole Polytechnique Federale de Lausanne (Suisse).
Donnees beaucoup utilisees: e.g. Goovaerts (1997) (geostatistique)
29 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Donnees reelles
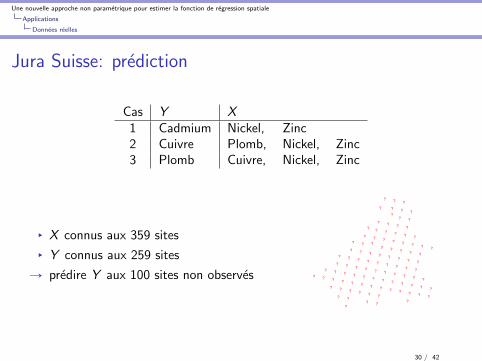
Jura Suisse: prediction
Cas Y X1 Cadmium Nickel, Zinc2 Cuivre Plomb, Nickel, Zinc3 Plomb Cuivre, Nickel, Zinc
§ X connus aux 359 sites
§ Y connus aux 259 sites
Ñ predire Y aux 100 sites non observes
?
??
?
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
??
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
? ?
??
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
??
?
?
?
?
?
?
?
? ?
?
?
?
?
?
?
? ?
?
? ?
?
?
?
?
?
30 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Applications
Donnees reelles
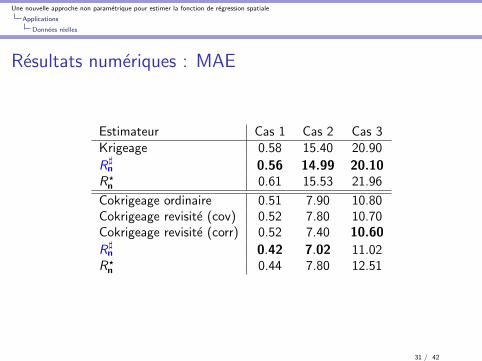
Resultats numeriques : MAE
Estimateur Cas 1 Cas 2 Cas 3Krigeage 0.58 15.40 20.90
R7n 0.56 14.99 20.10R‹n 0.61 15.53 21.96
Cokrigeage ordinaire 0.51 7.90 10.80Cokrigeage revisite (cov) 0.52 7.80 10.70Cokrigeage revisite (corr) 0.52 7.40 10.60
R7n 0.42 7.02 11.02R‹n 0.44 7.80 12.51
31 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
Cadre fonctionnel
32 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
Les donnees fonctionnelles sont de plus en plus considerees dans lalitterature:
§ Classification (Dabo et al. 2007, Delaigle et Hall 2012);§ ACP (Ramsay et Silverman 2005, Mas 2008, Shang 2014);§ Regression (Masry 2005, Dabo et Rhomari 2009, Ferraty et al.
2012);§ Detection de rupture (Berkes et al 2009, Hormann et Kokoszka
2010);
§...
et dans de nombreux domaines d’applications (e.g. Besse et al. 2000;Chebana et al. 2000; Jacques et Preda 2013; Antoniadis et al. 2014;Ferraty 2014 ):
§ consommation d’electricite§ spectrometrie§ hydrologie§ climat§ medecine: courbes de croissance, angle de flexion du genou
§...
33 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
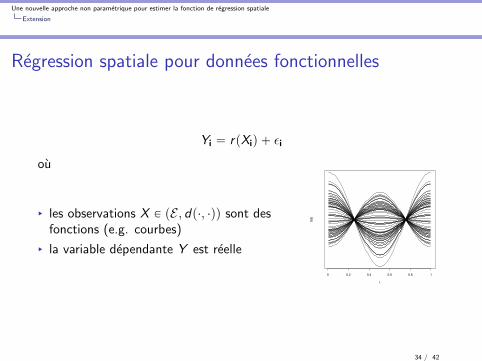
Regression spatiale pour donnees fonctionnelles
Yi “ rpXiq ` εi
ou
§ les observations X P pE , dp¨, ¨qq sont desfonctions (e.g. courbes)
§ la variable dependante Y est reelle
t
X(t)
0 0.2 0.4 0.6 0.8 1
34 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
Estimation de rp¨q,Pour xj P pE , dp¨, ¨qq, rnpxjq est definie comme dans le cas multivarie maisen considerant
fnpxjq “1
pnρNn E´
K1
´
dpxj,Xiq
bn
¯¯
ÿ
iPIn
K1
ˆ
dpxj,Xiq
bn
˙
K2
ˆ
}sj ´ si}
ρn
˙
et
ϕnpxjq “1
pnρNn E´
K1
´
dpxj,Xiq
bn
¯¯
ÿ
iPIn
YiK1
ˆ
dpxj,Xiq
bn
˙
K2
ˆ
}sj ´ si}
ρn
˙
K1 et K2 sont des noyaux (a support compact) definis sur Rbn et ρn sont les fenetres qui tendent vers 0dp¨, ¨q est une semi-metrique.
Des resultats de convergence sont donnes dans Ternynck (2014).
35 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
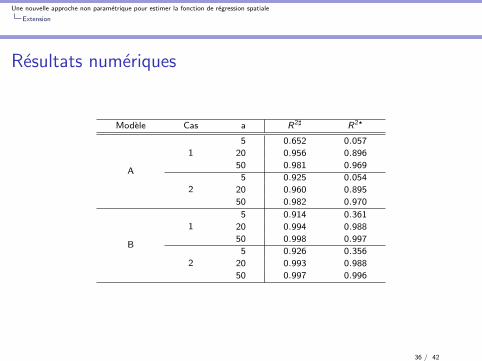
Resultats numeriques
Modele Cas a R27 R2‹
A
1
5 0.652 0.057
20 0.956 0.896
50 0.981 0.969
2
5 0.925 0.054
20 0.960 0.895
50 0.982 0.970
B
1
5 0.914 0.361
20 0.994 0.988
50 0.998 0.997
2
5 0.926 0.356
20 0.993 0.988
50 0.997 0.996
36 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
Resultat en image
5
10
15
20
25
5 10 15 20 25
-1.0
-0.5
0.0
0.5
1.0
5
10
15
20
25
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
5
10
15
20
25
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
Figure : Champ Y obtenu en considerant des variables explicatives Xfonctionnelles (pn “ 625 et a “ 5) puis pour chaque site, l’erreur au carre deprediction en considerant r 7n et r‹n resp.
37 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
Resultat en image
5
10
15
20
25
5 10 15 20 25
-2
0
2
4
6
8
10
12
14
5
10
15
20
25
5 10 15 20 25
0.5
1.0
1.5
2.0
5
10
15
20
25
5 10 15 20 25
0.5
1.0
1.5
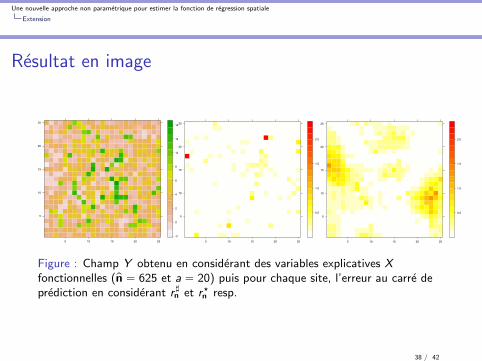
2.0
Figure : Champ Y obtenu en considerant des variables explicatives Xfonctionnelles (pn “ 625 et a “ 20) puis pour chaque site, l’erreur au carre deprediction en considerant r 7n et r‹n resp.
38 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Extension
Resultat en image
5
10
15
20
25
5 10 15 20 25
0
5
10
15
20
25
5
10
15
20
25
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
1.2
1.4
5
10
15
20
25
5 10 15 20 25
0.2
0.4
0.6
0.8
1.0
1.2
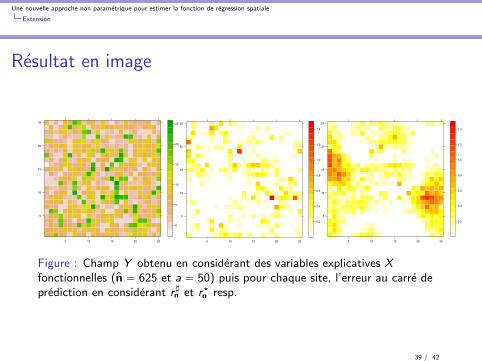
1.4
Figure : Champ Y obtenu en considerant des variables explicatives Xfonctionnelles (pn “ 625 et a “ 50) puis pour chaque site, l’erreur au carre deprediction en considerant r 7n et r‹n resp.
39 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Conclusion et perspectives
Conclusion et perspectives
40 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Conclusion et perspectives
Perspectives
§ adapter l’estimateur aux donnees categorielles;
§ ameliorer le choix de bn et ρn;
§ generaliser ce travail lorsque les sites sont aleatoires;
§ considerer d’autres alternatives a l’esperance conditionnelle : e.g. lesquantiles conditionnels
§ tenir compte des ”effets de bord” (Edge effects);
§ traiter le cas ou la region In est continue.
41 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Conclusion et perspectives
Je vous remercie pour votre ecoute.
42 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Bibliographie
Gerard Biau and Benoıt Cadre, Nonparametric spatial prediction,Statistical Inference for Stochastic Processes 7 (2004), no. 3,327–349.
Gerard Biau, Spatial kernel density estimation, MathematicalMethods of Statistics 12 (2003), no. 4, 371–390.
Michel Carbon, Christian Francq, and Lanh Tat Tran, Kernelregression estimation for random fields, Journal of StatisticalPlanning and Inference 137 (2007), no. 3, 778–798.
Noel A C Cressie, Statistics for spatial data, revised ed., Wiley Seriesin Probability and Statistics, vol. 110, Wiley-Interscience, 1993.
Michel Carbon, Lanh Tat Tran, and Berlin Wu, Kernel densityestimation for random fields (density estimation for random fields),Statistics & Probability Letters 36 (1997), no. 2, 115–125.
Sophie Dabo-Niang, Leila Hamdad, Camille Ternynck, andAnne-Francoise Yao, A kernel spatial density estimation allowing for
42 / 42
Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Bibliographie
the analysis of spatial clustering: application to Monsoon AsiaDrought Atlas data, Accepted, 2014.
Sophie Dabo-Niang, Mustapha Rachdi, and Anne-Francoise Yao,Kernel regression estimation for spatial functional random variables,Far East Journal of Theoretical Statistics 37 (2011), no. 2, 77–113.
Sophie Dabo-Niang and Anne-Francoise Yao, Kernel spatial densityestimation in infinite dimension space, Metrika 76 (2013), 19–52.
Mohamed El Machkouri, Asymptotic normality of theparzen–rosenblatt density estimator for strongly mixing randomfields, Statistical Inference for Stochastic Processes 14 (2011), no. 1,73–84.
Pierre Goovaerts, Geostatistics for natural resources evaluation,Oxford University Press on Demand, 1997.
Peter Hall, Hans-Georg Muller, and Ping-Shi Wu, Real-time densityand mode estimation with application to time-dynamic modetracking, Journal of Computational and Graphical Statistics 15(2006), no. 1, 82–100.
42 / 42

Une nouvelle approche non parametrique pour estimer la fonction de regression spatiale
Bibliographie
Raquel Menezes, Pilar Garcıa-Soidan, and Celia Ferreira,Nonparametric spatial prediction under stochastic sampling design,Journal of Nonparametric Statistics 22 (2010), no. 3, 363–377.
Camille Ternynck, Spatial regression for functional data with spatialdependency, Journal de la Societe Francaise de Statistique (2014).
Lanh Tat Tran, Kernel density estimation on random fields, Journalof Multivariate Analysis 34 (1990), no. 1, 37–53.
Hongxia Wang and Jinde Wang, Estimation of the trend function forspatio-temporal models, Journal of Nonparametric Statistics 21(2009), no. 5, 567–588.
Hongxia Wang, Jinde Wang, and Bo Huang, Prediction forspatio-temporal models with autoregression in errors, Journal ofNonparametric Statistics 24 (2012), no. 1, 217–244.
42 / 42
Recommended

















