PSI* 28/11/12 Lycée P.Corneille tp_modele_mecanique_dae.doc Page 1/1
Travaux Pratiques. :Direction assistée électrique Proposition d’un modèle mécanique
Temps alloué 2 heures Vous disposez : • De la direction assistée instrumentée (des capteurs ont été ajoutés pour l’acquisition) • D’un ordinateur raccordé au système • Du logiciel d’acquisition • D’un Dossier Technique à la fin de ce sujet • Deux vidéos du principe de fonctionnement des capteurs de couple volant et vitesse
véhicule Objectifs : On souhaite disposer d’un modèle global sous forme de schéma bloc de la direction assistée électrique. On s’intéressera ici uniquement à l’établissement du modèle électromécanique. • Analyser le modèle retenu • Etablir à partir des théorèmes généraux le modèle dynamique de la chaîne d’énergie de la
direction assistée

PSI* 28/11/12 Lycée P.Corneille tp_modele_mecanique_dae.doc Page 2/2 A- IDENTIFICATION DES ELEMENTS DE LA DIRECTION
Question 1 ; Identifier sur la station et grâce aux documents du dossier technique les différents éléments de la direction assistée :
A. Biellette gauche B. Biellette droite C. Capteur de rotation roue gauche D. Capteur de rotation roue droite E. Capteur de couple roue gauche F. Capteur de couple roue droite G. Capteur de rotation volant H. Limiteur de couple roue gauche
I. Limiteur de couple roue droite J. Moteur K. Réducteur L. Crémaillère M. Calculateur (RENAULT) N. Capteur de couple volant (RENAULT) O. Capteur de couple en sortie de colonne
Il faudrait ajouter à la liste des capteurs, le capteur de vitesse du véhicule. De plus il est possible de mesurer l’intensité consommée par le moteur. Seuls les capteurs surlignés en bleu sont utiles au fonctionnement de l’assistance. Les capteurs supplémentaires permettent d’instrumenter le système pour accéder aux autres grandeurs utiles aux manipulations.

Page 3
Mettre sous tension le support grâce au bouton poussoir sur le coté droit. Activer la direction assistée en tournant s’il le faut la clé située au niveau de la colonne de direction. B- MISE EN EVIDENCE DES PARAMETRES D'ASSISTANCE
Mesure N°1 : Le bouton de réglage de la vitesse du véhicule sera placé dans la position "V = 0 Km/h".
ð Lancer le logiciel DAE qui permet d’acquérir et de visualiser la mesure.
ð Mettre le volant en butée de braquage à gauche (volant tourné dans le sens positif = sens trigo).
ð Etablir la communication micro - station en validant successivement [Mesures], [Initialiser] Un message à l’écran indique que la mesure est prête à démarrer.
ð Appuyer sur le bouton ‘Départ mesure’ du tableau de bord. Ceci a pour effet de lancer le chronomètre contrôlant la durée de mesure (10 s). Attention, le départ de la mesure n’est effectif que lorsque le chronomètre se met à décompter.
ð Pendant ces 10 s, tourner le volant jusqu'à la butée droite (appuyer légèrement sur la butée en augmentant le couple exercé) puis revenir à la butée gauche (appuyer légèrement sur la butée en augmentant le couple exercé).
ð Lorsque l'importation des résultats est terminée fermer la fenêtre en cours. Sauvegarder la mesure.
Mesure N°2 : Le bouton de réglage de la vitesse du véhicule sera placé dans la position "V = 80 Km/h". Reprendre la manipulation précédente et sauvegarder la mesure.
Question 2 : Tracer la courbe donnant le couple volant en fonction de la rotation du volant pour les 2 mesures effectuées. Tracer la courbe donnant l’intensité de commande du moteur en fonction du couple volant. Commenter ces courbes.
Question 3 : L’embrayage sert à déconnecter le moteur de la colonne lorsque l’assistance devient inutile. La loi de commande de l’embrayage est la suivante : Expliquer l’intérêt d’un tel hystérésis.
clé en position marche

Page 4
Remarque: après plusieurs mesures le moteur chauffe, l’intensité d’alimentation risque d’être inférieure à la valeur maximale de 25A (protection thermique). Dans ce cas, couper l’assistance en installant la valeur maxi de la vitesse du véhicule (potentiomètre du tableau de bord) et attendre que la température du moteur revienne à la température ambiante. C- MODELE MECANIQUE On propose le modèle mécanique suivant. On va écrire les équations dynamiques linéarisées pour de petits déplacements autour de cette position neutre.
Question 4 : Critiquer ce modèle. On note
CV le couple exercé par le conducteur sur le volant CM le couple moteur sur le rotor CP le couple de résistance au pivotement de chaque roue αV l’angle de rotation du volant αC l’angle de rotation de la colonne ΩV la vitesse de rotation du volant ΩC la vitesse de rotation de la colonne ΩM la vitesse de rotation du moteur ΩR la vitesse de rotation du support de roue V la vitesse de translation de la crémaillère
Roue droite
I(D,Z)=IR Biellette masse mb
Crémaillère masse mc
Colonne I(A,X)=IC
Rotor moteur I(A,X)=IM
Volant I(A,X)=IV
Barre de torsion.
Raideur KT
A
B C
D
X
Z Y
Roue gauche I(D’,Z)=IR
V
CP
Hypothèses : liaisons parfaites pesanteur négligée géométrie simplifiée

Page 5
On a grâce : au système roue - vis sans fin : ΩC =R . ΩM où R est le rapport de réduction au système pignon – crémaillère : V=r . ΩC où r est le rayon primitif du pignon au levier : ΩR = a. V où a est la distance CD Question 5 : A partir du théorème du moment dynamique, établir la relation entre αV ; ses dérivées ; CV ; la raideur KT ; l’angle αC . En déduire les fonctions de transfert H1 et H7 .
Question 6 : A partir du théorème de l’énergie cinétique, établir la relation entre αC et ses dérivées ; CM ; CP ; la raideur KT , l’angle αV . On mettra en évidence une inertie équivalente dont on donnera l’expression.
En déduire les fonctions de transfert H4 ; H5 ; H8 et H9.
Question 7 : A partir des équation du motreur à courant continu, retrouver les fonctions de transfert H2 ; H3 ; H6.
Question 8 : A-t-on à faire ici à un asservissement ? Si oui, préciser la consigne, le signal d’erreur, la boucle de rétroaction. Si non justifier pourquoi ce système n’est pas asservi.
Question 9 : Rechercher dans le dossier technique les valeurs de certains paramètres du modèle. Comment évaluer les paramètres manquants ?
Page 6
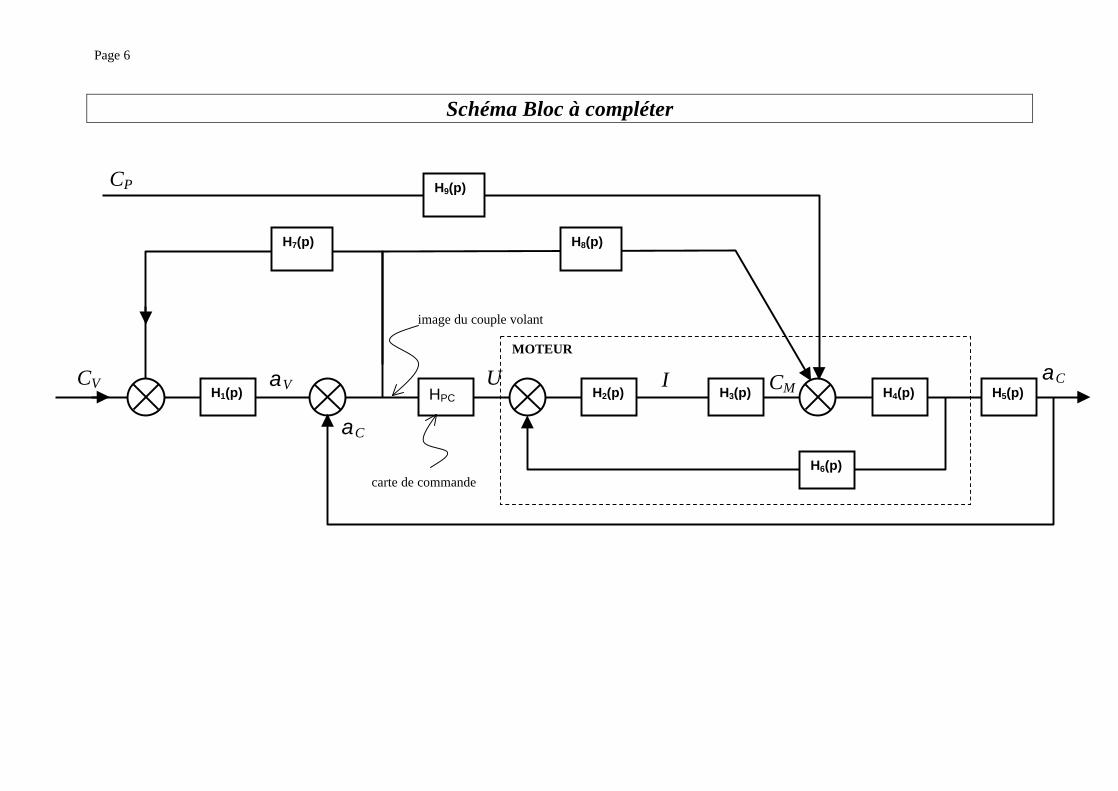
Schéma Bloc à compléter
H2(p) H3(p) H4(p) H5(p)
H6(p)
HPC H1(p)
H7(p)
CV αV
αC
U CM
H8(p)
CP H9(p)
MOTEUR
αC
image du couple volant
carte de commande
I

Page 7
TP n°4 7/7 tp_modele_mecanique_dae.doc
DOCUMENTATIONS ANNEXES 1-PRESENTATION DE LA DAE 2-DIRECTION ASSISTEE ET SYSTEME DE DIRECTION 3-CAHIER DES CHARGES 4-LOIS D’ASSISTANCE 5-CARACTERISTIQUES MECANIQUES 6-CARACTERISTIQUES DU SYSTEME DE DIRECTION 7-DIAGRAMME FAST DU SYSTEME DAE 8- DOCUMENT 1 : Implantation des composants 9- DOCUMENT 2 : Chaîne d’information

Page 8
TP n°4 8/8 tp_modele_mecanique_dae.doc
1-Présentation de la DAE Le mécanisme de direction assistée électrique de TWINGO est décrit par le schéma document 1. Celui-ci représente l’implantation sur le véhicule des différents constituants. La fonction globale est : "orienter les roues du véhicule". Le diagramme FAST présenté partiellement ci-dessous permet de préciser les fonctions de ce système. L’ensemble de celui-ci se trouve en annexe en fin de TP.
Dans cette étude nous allons nous intéresser à la fonction « Assister la manoeuvre » Caractéristiques L’assistance est réalisée par l’intermédiaire du moto réducteur :
ð en fonction du couple au volant: Le système doit assister le conducteur dès la mise en rotation du volant. Un capteur informe le calculateur de l’intensité du couple exercé sur le volant. Le moto réducteur est alors commandé en fonction du couple exercé par l’utilisateur.
ð en fonction de la vitesse du véhicule : Une assistance élevée offre un confort de manœuvre à l’arrêt ou à faible vitesse. Elle n’est plus nécessaire à haute vitesse car les braquages sont réduits et également pour des raisons de précision et de sécurité de conduite. A partir du seuil de vitesse (environ 74 km/h) où le confort de la direction traditionnelle est suffisant, le moteur électrique n’est plus alimenté. Il est alors désaccouplé mécaniquement de la colonne grâce à l’embrayage électromagnétique.
Le calculateur, à partir des informations couple au volant et vitesse du véhicule, assurera une assistance variable en commandant le moto réducteur. Fonctionnement Le système doit assister le conducteur dès la mise en rotation du volant. Le couple d’assistance, fourni par le moto réducteur, s’ajoutera au couple exercé par le conducteur pour former le couple effectivement transmis par la colonne de direction à la crémaillère, puis aux roues.
Adapter l'énergie
Assister la manoeuvre
Transformer le mouvement
Adapter l'effort Crémaillère, Biellettes, Pivots de roue
Volant, Colonne + Pignon,
DAEV
Fonctions Solutions techniques Pourquoi ? Comment ?
Fonction étudiée
ORIENTER LES ROUES

Page 9
TP n°4 9/9 tp_modele_mecanique_dae.doc
Cvol
MoteurRéducteur
CrémaillèreVolant Colonne et pignon
Cmot
Ccol Système dedirection Roues
Ccol Cvol Cmot= +
Figure 1
Lorsque un couple est exercé sur le volant, celui-ci est transmis mécaniquement à la crémaillère. L'information électrique correspondante est communiquée au calculateur par l’intermédiaire d’un capteur. Le calculateur détermine alors l'intensité du courant à fournir au moteur électrique en fonction du couple au volant et de la vitesse du véhicule.
Système de direction
Colonne
Biellette
Volant
Pivot de roue
Roue
Crémaillére
Moteur
Barre de torsion
Capteur de couple
Direction assistée
Calculateur
Capteur deVitesse
Prise diagnostique
RégimeMoteur
Figure 2 : Direction assistée et Système de direction
La rotation de la colonne (et donc le pivotement des roues), due à l’effet conjugué du conducteur et du moteur, est aussi prise en compte par le capteur de couple au volant (ou de déformation de la barre de torsion montée en série sur la colonne), assurant ainsi un retour de l’information.
Le système est bouclé et les schémas suivants permettent de préciser sa structure.
Structure globale (figure 3) A un couple volant correspond un pivotement des roues en sortie de l'ensemble Direction Assistée Electrique et éléments de commande des roues (biellettes et pivots de roues) appelé ici : Système de direction.
Une autre entrée correspond à la valeur de la vitesse du véhicule , l’assistance étant fonction de ce paramètre. Un dernière entrée correspond aux actions résistantes au niveau des roue, ici : un couple de résistance au pivotement Cp.
Vvéhicule DAE et système de
direction
C volant α roues
Figure 3
C p

Page 10
TP n°4 10/10 tp_modele_mecanique_dae.doc
2-Direction assistée et Système de direction La représentation de la figure 4 permet de distinguer le Système de direction de la Direction Assistée Electrique. La grandeur de sortie de cette dernière correspond au déplacement de la crémaillère de direction.
Direction Assistée Electrique : mise en évidence du bouclage Le schéma bloc simplifié de la figure 5 permet de mettre en évidence la structure bouclée de la direction : comparateur, chaîne d’action et chaîne de retour.
Une rotation du volant provoque la déformation de la barre de torsion, il y a donc un décalage angulaire ∆α entre volant et colonne. Ce décalage angulaire est une fonction linéaire du couple exercé sur le volant. Le calculateur dispose de cette valeur ainsi que la vitesse du véhicule pour commander le moteur électrique. Celui-ci agit sur la colonne par l’intermédiaire du réducteur et ce en fonction de l’écart entre angle au volant et angle de colonne et de la vitesse du véhicule.
Figure 5
αvolant Moteur
∆α = image du couple au volant
Calculateur Réducteur et colonne Crémaillère
Vitesse du véhicule
Ucapteur
Capteur
Umoteur αmoteur αcolonne λcrémaillère
αcolonne
+ -
Vvéhicule DAE
C volant λ crémaillère
Figure 4
Système de direction α roues
C p
TP n°4 11/11 tp_modele_mecanique_dae.doc
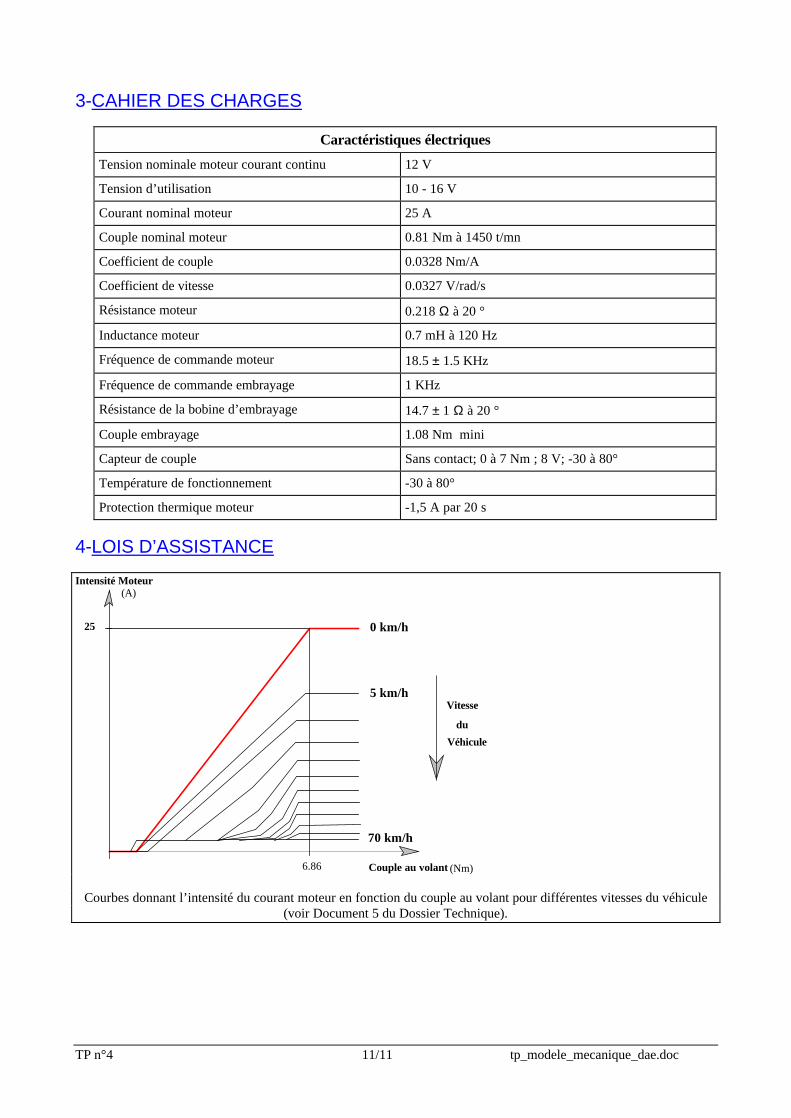
3-CAHIER DES CHARGES
Caractéristiques électriques Tension nominale moteur courant continu 12 V
Tension d’utilisation 10 - 16 V
Courant nominal moteur 25 A
Couple nominal moteur 0.81 Nm à 1450 t/mn
Coefficient de couple 0.0328 Nm/A
Coefficient de vitesse 0.0327 V/rad/s
Résistance moteur 0.218 Ω à 20 °
Inductance moteur 0.7 mH à 120 Hz
Fréquence de commande moteur 18.5 ± 1.5 KHz
Fréquence de commande embrayage 1 KHz
Résistance de la bobine d’embrayage 14.7 ± 1 Ω à 20 °
Couple embrayage 1.08 Nm mini
Capteur de couple Sans contact; 0 à 7 Nm ; 8 V; -30 à 80°
Température de fonctionnement -30 à 80°
Protection thermique moteur -1,5 A par 20 s 4-LOIS D’ASSISTANCE Intensité Moteur
(A)
25
Couple au volant (Nm)6.86
Vitesse
duVéhicule
0 km/h
5 km/h
70 km/h
Courbes donnant l’intensité du courant moteur en fonction du couple au volant pour différentes vitesses du véhicule (voir Document 5 du Dossier Technique).
TP n°4 12/12 tp_modele_mecanique_dae.doc
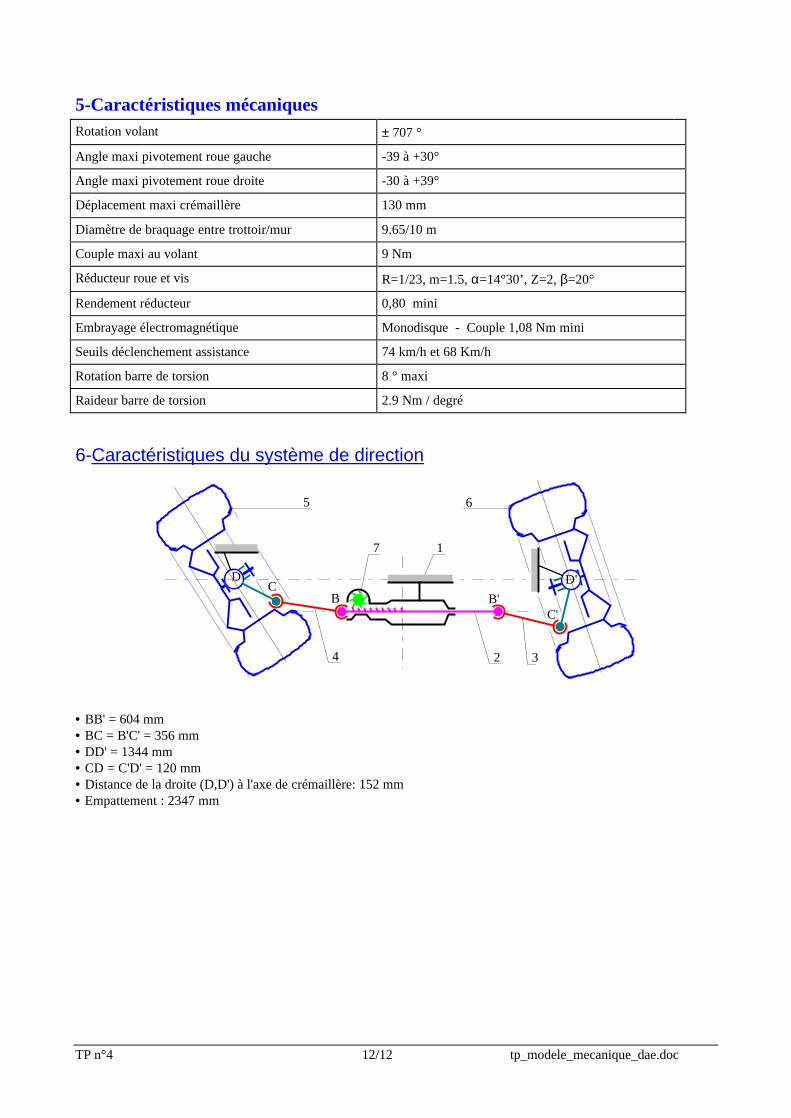
5-Caractéristiques mécaniques
Rotation volant ± 707 °
Angle maxi pivotement roue gauche -39 à +30°
Angle maxi pivotement roue droite -30 à +39°
Déplacement maxi crémaillère 130 mm
Diamètre de braquage entre trottoir/mur 9.65/10 m
Couple maxi au volant 9 Nm
Réducteur roue et vis R=1/23, m=1.5, α=14°30’, Z=2, β=20°
Rendement réducteur 0,80 mini
Embrayage électromagnétique Monodisque - Couple 1,08 Nm mini
Seuils déclenchement assistance 74 km/h et 68 Km/h
Rotation barre de torsion 8 ° maxi
Raideur barre de torsion 2.9 Nm / degré 6-Caractéristiques du système de direction
3
5 6
C'
CD D'
7 1
24
B'B
• BB' = 604 mm • BC = B'C' = 356 mm • DD' = 1344 mm • CD = C'D' = 120 mm • Distance de la droite (D,D') à l'axe de crémaillère: 152 mm • Empattement : 2347 mm
TP n°4 13/13 tp_modele_mecanique_dae.doc
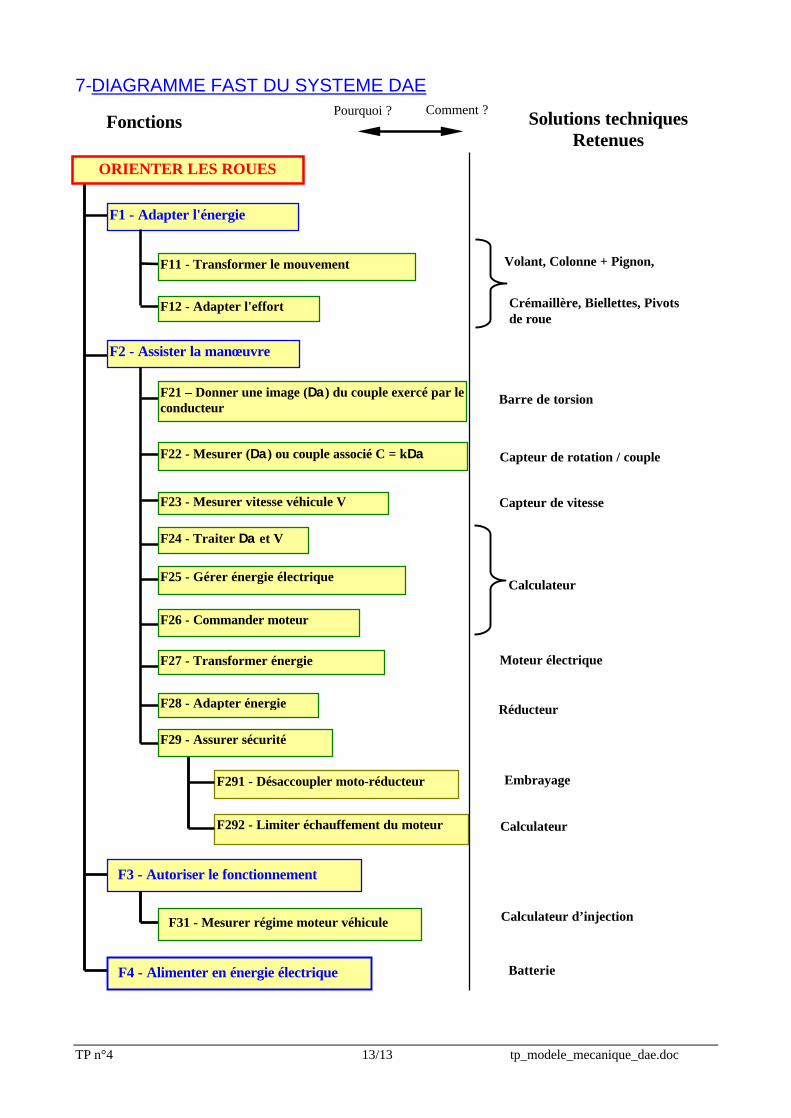
7-DIAGRAMME FAST DU SYSTEME DAE
Solutions techniques Retenues
F1 - Adapter l'énergie
F2 - Assister la manœuvre
F291 - Désaccoupler moto-réducteur
F292 - Limiter échauffement du moteur
Crémaillère, Biellettes, Pivots de roue
Volant, Colonne + Pignon,
Barre de torsion
Capteur de rotation / couple
Capteur de vitesse
Calculateur
Moteur électrique
Réducteur
Embrayage
Calculateur
Fonctions Pourquoi ? Comment ?
F3 - Autoriser le fonctionnement
F31 - Mesurer régime moteur véhicule
F4 - Alimenter en énergie électrique
Calculateur d’injection
Batterie
F11 - Transformer le mouvement
F12 - Adapter l'effort
F21 – Donner une image (∆α) du couple exercé par le conducteur
F22 - Mesurer (∆α) ou couple associé C = k∆α
F23 - Mesurer vitesse véhicule V
F24 - Traiter ∆α et V
F25 - Gérer énergie électrique
F26 - Commander moteur
F27 - Transformer énergie
F28 - Adapter énergie
F29 - Assurer sécurité
ORIENTER LES ROUES

TP n°4 14/14 tp_modele_mecanique_dae.doc
8- DOCUMENT 1 : Implantation des composants
I Moto-réducteur III Calculateur d ’injection V Capteur de vitesse VI Calculateur DAE VII Capteur de couple

TP n°4 15/15 tp_modele_mecanique_dae.doc
9- DOCUMENT 2 : Chaîne d’information
Recommended