BioOne sees sustainable scholarly publishing as an inherently collaborative enterprise connecting authors, nonprofit publishers, academic institutions, researchlibraries, and research funders in the common goal of maximizing access to critical research.
Flight response to spatial and temporal correlates informs risk from wind turbinesto the California CondorAuthor(s): Sharon A. Poessel, Joseph Brandt, Laura Mendenhall, Melissa A. Braham, Michael J.Lanzone, Andrew J. McGann, and Todd E. KatznerSource: The Condor, 120(2):330-342.Published By: American Ornithological Societyhttps://doi.org/10.1650/CONDOR-17-100.1URL: http://www.bioone.org/doi/full/10.1650/CONDOR-17-100.1
BioOne (www.bioone.org) is a nonprofit, online aggregation of core research in the biological, ecological, andenvironmental sciences. BioOne provides a sustainable online platform for over 170 journals and books publishedby nonprofit societies, associations, museums, institutions, and presses.
Your use of this PDF, the BioOne Web site, and all posted and associated content indicates your acceptance ofBioOne’s Terms of Use, available at www.bioone.org/page/terms_of_use.
Usage of BioOne content is strictly limited to personal, educational, and non-commercial use. Commercial inquiriesor rights and permissions requests should be directed to the individual publisher as copyright holder.

Volume 120, 2018, pp. 330–342DOI: 10.1650/CONDOR-17-100.1
RESEARCH ARTICLE
Flight response to spatial and temporal correlates informs risk from windturbines to the California Condor
Sharon A. Poessel,1* Joseph Brandt,2 Laura Mendenhall,2a Melissa A. Braham,3 Michael J. Lanzone,4
Andrew J. McGann,4 and Todd E. Katzner1
1 Forest and Rangeland Ecosystem Science Center, U.S. Geological Survey, Boise, Idaho, USA2 Hopper Mountain National Wildlife Refuge Complex, U.S. Fish and Wildlife Service, Ventura, California, USA3 Department of Geology & Geography, West Virginia University, Morgantown, West Virginia, USA4 Cellular Tracking Technologies, Rio Grande, New Jersey, USAa Current address: U.S. Fish and Wildlife Service, McConnell Air Force Base, Kansas, USA* Corresponding author: [email protected]
Submitted May 23, 2017; Accepted January 16, 2018; Published April 11, 2018
ABSTRACTWind power is a fast-growing energy resource, but wind turbines can kill volant wildlife, and the flight behavior ofobligate soaring birds can place them at risk of collision with these structures. We analyzed altitudinal data from GPStelemetry of critically endangered California Condors (Gymnogyps californianus) to assess the circumstances under whichtheir flight behavior may place them at risk from collision with wind turbines. Condor flight behavior was stronglyinfluenced by topography and land cover, and birds flew at lower altitudes and closer to the rotor-swept zone of windturbines when over ridgelines and steep slopes and over forested and grassland cover types. Condor flight behavior wastemporally predictable, and birds flew lower and closer to the rotor-swept zone during early morning and evening hoursand during the winter months, when thermal updrafts were weakest. Although condors only occasionally flew ataltitudes that placed them in the rotor-swept zone of turbines, they regularly flew near or within wind resource areaspreferred by energy developers. Practitioners aiming to mitigate collision risk to this and other soaring bird species ofconservation concern can consider the manner in which flight behavior varies temporally and in response to areas ofhigh topographic relief and proximity to nocturnal roosting sites. By contrast, collision risk to large soaring birds fromturbines should be relatively lower over flatter and less rugged areas and in habitat used during daytime soaring.
Keywords: flight altitude, land cover, landform, Gymnogyps californianus, soaring, topographic roughness, windenergy development
La respuesta de vuelo a correlaciones espaciales y temporales revela el riesgo de las turbinas eolicas paraGymnogyps californianus
RESUMENLa energıa eolica es un recurso energetico en rapido crecimiento, pero las turbinas eolicas pueden matar a la faunasilvestre que vuela, y el comportamiento de vuelo de las aves que son planeadoras obligadas puede ponerlos en riesgode colision con estas estructuras. Analizamos datos altitudinales obtenidos con telemetrıa de GPS del Condor deCalifornia (Gymnogyps californianus), una especie en peligro crıtico, para evaluar las circunstancias bajo las cuales suscomportamientos de vuelo pueden ponerlos en riesgo de colision con las turbinas eolicas. El comportamiento devuelo del condor estuvo fuertemente influenciado por la topografıa y la cobertura del suelo, y las aves volaron amenores altitudes y mas cerca de la zona de barrido del rotor de las turbinas eolicas cuando estuvieron sobre los filos yen pendientes pronunciadas y sobre tipos de cobertura boscosa y de pastizal. El comportamiento de vuelo del condorfue temporalmente predecible, y las aves volaron mas bajo y mas cerca de la zona de barrido del rotor durante lamanana temprano y a la tarde y durante los meses de invierno, cuando las termicas ascendentes fueron mas debiles.Aunque los condores volaron solo ocasionalmente a altitudes en las que se ubicaron en la zona de barrido del rotor delas turbinas, sı volaron regularmente cerca o dentro de los recursos eolicos preferidos por los desarrollos de energıa.Los profesionales que deseen mitigar el riesgo de colision de esta y otras especies de aves planeadoras depreocupacion para la conservacion pueden considerar el modo en el que varıa el comportamiento de vuelotemporalmente y en respuesta a areas de alto relieve topografico y en proximidad a los dormideros nocturnos. Encontraste, el riesgo de colision de las aves planeadoras grandes con las turbinas deberıa ser relativamente mas bajo enlas areas mas planas y menos escarpadas y en habitats usados durante las horas de planeo diurno.
Palabras clave: altitud de vuelo, cobertura del suelo, desarrollo de energıa eolica, forma del relieve, Gymnogypscalifornianus, planeo, rugosidad topografica
Q 2018 American Ornithological Society. ISSN 0010-5422, electronic ISSN 1938-5129Direct all requests to reproduce journal content to the AOS Publications Office at [email protected]

INTRODUCTION
Wind power is one of the fastest growing energy sources in
the world (http://windenergyfoundation.org/what-is-wind-
energy/). However, the development of wind energy does
not occur randomly, but instead occurs in global
renewable energy hotspots. One such hotspot is the
United States of America (USA), which is second globally
in total installed wind energy capacity (www.fi-powerweb.
com/Renewable-Energy.html), with 41 states currently
maintaining industrial-scale wind energy facilities (AWEA
2017).
Wind energy may have negative consequences for
wildlife, especially birds and bats. Wind energy–wildlife
conflicts can occur through collisions with turbines
(Arnett et al. 2008, Smallwood and Thelander 2008, Loss
et al. 2013, Zimmerling and Francis 2016), displacement
due to disturbance (Drewitt and Langston 2006, Madders
and Whitfield 2006), direct habitat loss (Drewitt and
Langston 2006, Zimmerling et al. 2013), or reduced
breeding success (Dahl et al. 2012). At one large wind
energy facility in California, USA, the adjusted bird
mortality rate estimate was 4.7 deaths per MW per year,
or 2,710 deaths per year (Smallwood and Thelander 2008).
On a national scale, an estimated 140,000–328,000 birds
are killed annually by turbine collisions (Loss et al. 2013).
Large soaring birds (e.g., storks, vultures, and eagles) in
particular are at high risk of demographic consequences
from fatalities at wind energy facilities due to their lowreproductive rates and their reliance on topographic and
weather conditions preferred by wind energy facility
developers (Madders and Whitfield 2006, Smallwood and
Thelander 2008, Chevallier et al. 2010, de Lucas et al.
2012). Furthermore, a number of environmental, temporal,
and behavioral factors may influence whether a soaring
bird will fly above or within the rotor-swept zone of
modern industrial horizontal-axis wind turbines (Barrios
and Rodrıguez 2004, Drewitt and Langston 2006, de Lucas
et al. 2008, 2012, Katzner et al. 2012, 2015).
A wide range of obligate soaring birds, including
Eurasian Griffons (Gyps fulvus; Barrios and Rodrıguez
2004, de Lucas et al. 2008), Egyptian Vultures (Neophron
percnopterus; Carrete et al. 2009, 2012), Cinereous
Vultures (Aegypius monachus; Vasilakis et al. 2016), and
Bearded Vultures (Gypaetus barbatus; Reid et al. 2015), are
considered at risk from or have suffered substantial
mortality from collisions with turbines. These birds likely
are at risk because their high wing loading and low
maneuverability increase their probability of flying at lower
altitudes and, thus, being struck by a rotating blade
(Barrios and Rodrıguez 2004, de Lucas et al. 2008, 2012).
The largest obligate soaring species in North America is
the critically endangered California Condor (Gymnogyps
californianus; hereafter, ‘‘condor’’). Once extirpated from
the wild and sustained by captive breeding, a wild but
mostly captive-hatched population of ~290 condors now
occupies parts of the southwestern USA and northwestern
Mexico (Snyder and Snyder 2000, Mee and Hall 2007,
USFWS 2017). This species is subject to many threats in
the wild, including lead poisoning, microtrash ingestion,
and exposure to certain organochlorines (reviewed by
Walters et al. 2010). Furthermore, California, in the center
of condor range and a biodiversity hotspot (Myers et al.
2000), is also ranked fourth among U.S. states in total
installed wind energy capacity (5,609 MW as of 2017;
AWEA 2017). Although no condor has yet been detected
as a casualty from collision with a wind turbine, as both
condor numbers and wind energy facilities have increased
in California, wildlife managers have expressed concern
that condors may be susceptible to mortality from wind
energy facilities (USFWS 2016, BLM 2016, http://www.fws.
gov/ventura/endangered/species/info/ca_condor-wind_
energy.html).
Because of their flight behavior and conservation
history, condors are a useful model species to understand
the risk that obligate soaring birds face from potential
wind energy development. As such, we evaluated patterns
in flight responses of these birds to spatial and temporal
variation in the topographic and vegetative environment
that they experience. We hypothesized that condors would
vary their flight altitude with spatially and temporally
specific responses to topography and land cover. We tested
this hypothesis by evaluating 2 predictions about their
flight behavior. First, we predicted that condors would
show an altitudinal response to the updraft potential of the
spatial landscape by flying higher over areas with greater
potential to generate thermal updraft (e.g., flat areas or
bare or sparsely vegetated ground where thermals are
produced). Second, we predicted that condors would show
an altitudinal response to the updraft potential of thetemporal landscape by flying highest at the times when
updraft capacity was greatest (i.e. midday, as opposed to
morning and evening, and summer, as opposed to winter,
both times when stronger thermals form). To place flight
altitude measurements in the context of potential collision
risk, we also evaluated condor flight behavior in relation to
distance to the wind resources preferred for wind energy
development and proportion of time spent within the
rotor-swept zone of turbines. Finally, we interpreted these
results more broadly, in the context of turbine-related risk
to other obligate soaring wildlife.
METHODS
Study Area, Focal Species, and Telemetry DataCollectionWe studied the flight behavior of condors north of Los
Angeles in southern California, USA, from the Pacific
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
S. A. Poessel, J. Brandt, L. Mendenhall, et al. Flight response of California Condors 331

coast across mountains to deserts (Figure 1). Land cover in
the study area ranges from open grasslands and agricul-
tural fields to coniferous forests (http://gapanalysis.usgs.
gov/gaplandcover/data/download/). Elevations range from
sea level on the coast to .3,000 m above sea level (a.s.l.) in
the Sierra Nevada. The Tehachapi-Mojave Wind Resource
Area, one of the world’s largest concentrations of wind
energy facilities (http://www.tehachapiedc.com/about-
tehachapi/tehachapi-wind-industry), is located in the study
area in Kern County, between Tehachapi Pass and the
Mojave Desert (Figure 1).
U.S. Fish and Wildlife Service (USFWS) biologists
captured (sometimes repeatedly), attached telemetry
devices to, and released condors for this study from
FIGURE 1. Map showing densities of flight locations of 24 California Condors tracked in southern California, USA, 2013–2015. Darkershading indicates higher densities. Horizontal lines indicate areas of high-class winds (wind classes �3, with speeds .6.4 m s�1). Alsoshown are the locations of Hopper Mountain and Bitter Creek National Wildlife Refuges (NWR) and the Tehachapi-Mojave WindResource Area.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
332 Flight response of California Condors S. A. Poessel, J. Brandt, L. Mendenhall, et al.

December 2013 to July 2015 in Hopper Mountain National
Wildlife Refuge (NWR) in Ventura County (34.4588N,
118.8518W) and Bitter Creek NWR in Kern County
(34.9288N, 119.3818W; Figure 1). Some captive-bred birds
in our study had telemetry devices attached when first
released into the wild. All birds were of known age, either
because they were raised in captivity and released into the
wild or because they were wild-hatched at monitored
nests. Condors were fitted with solar-powered Global
Positioning System–Global System for Mobile Communi-
cations (GPS–GSM) patagial telemetry units (Cellular
Tracking Technologies, Rio Grande, New Jersey, USA).
Telemetry units collected, at 30-s, 15-min, or 30-min
intervals, data on location, date, time, altitude a.s.l., ground
speed (knots), horizontal and vertical dilution of precision
(HDOP and VDOP), and fix quality (2D or 3D). We tested
GPS horizontal (x 6 SD¼ 19 6 18 m) and vertical (2 6 36
m) precision; these errors were normally distributed (S.
Poessel and T. Katzner personal observation).
Telemetry Data ProcessingTo calculate flight altitude above ground level (a.g.l.), we
first obtained the ground elevation a.s.l. at each GPS
location from an ~30-m resolution digital elevation model
(DEM; http://nationalmap.gov/3dep_prodserv.html). We
then subtracted the ground elevation value from the
altitude measurement collected by the telemetry unit. For
analysis purposes, we ignored the subset of data collected
at night because condors typically roost at night and donot engage in flight. We also subsampled higher-frequency
(i.e. 30-s) data to 15-min intervals by including only the
first location that occurred in a 15-min period. Analyzing
data collected at these less frequent intervals (i.e. 15 or 30
min) should have reduced the potential for autocorrelation
between successive GPS locations. We filtered the
remaining telemetry data to remove GPS locations for
which diagnostic or altitudinal data indicated errors. For
example, we removed locations with HDOP or VDOP �10(D’Eon and Delparte 2005; we also used our own data to
independently validate the VDOP threshold) and 2D fixes.
Fixes that are 2D can be inaccurate because they are
obtained from only 3 satellites (compared with �4satellites for 3D fixes), and they provide a coordinate
position but not altitude a.s.l. Likewise, we removed fixes
with altitudes a.g.l. lower than�50 m (Katzner et al. 2012)
and fixes with altitudes a.s.l. .4,000 m that were also
inconsistent with neighboring data points (for example, if
altitude at subsequent points was 800 m, 6,000 m, and 800
m, we interpreted the location with the largest altitude as
indicative of a GPS error). Finally, we removed any
locations collected by the telemetry units while the birds
were in captivity or in trapping pens.
Because our objective was to analyze flight altitudes of
condors relative to environmental correlates, we filtered
from our dataset all locations that we determined
represented a bird not in flight. We defined ‘‘flight
locations’’ as those GPS telemetry data with either (1) a
recorded speed �3 knots; or (2) a recorded speed ,3 knots
that also had an altitude a.g.l. �100 m. We focused all
subsequent analyses only on flight locations.
Potential error in defining flight locations can occur
from error in GPS measurements, in DEM values, and
from interactions between the two. Our definition of flight
locations was different from that recently developed by
others (Peron et al. 2017), deliberately conservative, and
almost certainly resulted in some valid flight points being
excluded. We took this approach for a number of reasons.
First, the goal of our study was to draw inference about
flight altitude, and, as such, we had to define points as
either flight or nonflight locations. Any definition will be
imperfect, and we surmised that our inference would be
stronger if we excluded a few flight locations from our data
than if we inappropriately included nonflight locations in
our data. Second, by removing from consideration any data
points with VDOP �10, we culled the data to be more
precise than they would have been otherwise; Peron et al.
(2017) did no culling of VDOP. We considered using a
stricter VDOP threshold. However, cursory evaluation of
our data suggested that .90% of GPS locations considered
in our analysis had VDOP ,5 and .97% of locations had
VDOP ,7. Thus, a stricter threshold would have been
unlikely to have affected the patterns that our models
detected in the data. Finally, we did not filter our data by
time of day, as did Peron et al. (2017). Our data showed
that condors spent much of their time on the ground
during the middle of the day, and so filtering based on time
of day would have resulted in many ground locations being
included erroneously as flight locations.
External Data LinkagesWe used ArcGIS 10.3 (ESRI, Redlands, California, USA) to
link each flight location to 4 types of spatial data. To
understand how condor flight behavior responded to
topography, we associated flight locations with measure-
ments of a topographic position index (TPI; Jenness et al.
2013) and a terrain ruggedness index (TRI; Riley et al.
1999) in the cell (~30-m resolution) directly below each
flight location. The TPI, estimated with Topography Tools
for ArcGIS (Dilts 2015), is a measurement of slope position
that reflects the difference between the elevation in a cell
and the average elevation of its neighboring cells. We
classified TPI measurements into 6 landform categories
(valleys, lower slopes, gentle slopes, steep slopes, upper
slopes, and ridges) based on the value and sign of the
measurement and the slope of the cell (graphical
representations of each of these categories are illustrated
by Jenness et al. 2013). The TRI, estimated with Geo-
morphometry & Gradient Metrics Tools (Evans et al.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
S. A. Poessel, J. Brandt, L. Mendenhall, et al. Flight response of California Condors 333

2014), reflects landscape roughness, calculated as the
square root of the sum of the squared differences between
the elevation in a cell and the elevation of its neighboring
cells (Riley et al. 1999). Larger values of TRI indicate
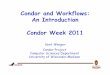
rougher terrain (Figure 2). We calculated both metrics
from the same DEM as above (http://nationalmap.gov/
3dep_prodserv.html). To understand how condor flight
behavior responded to variation in cover, we associated
flight locations with 30-m land cover data from the 11-
category National Vegetation Classification System Class
of the National Gap Analysis Program (http://gapanalysis.
usgs.gov/gaplandcover/data/download/) in the cell directly
below each flight location.
Finally, to understand the relationship between condor
flight behavior and wind resources used in commercial
wind energy development, we measured the distance from
each flight location to the nearest commercially valuable
winds. The dataset that we used for this analysis (NREL
2015) classifies wind at 50 m a.g.l. based on its speed and
power. Of the 7 wind classes, areas with a class of �3 (i.e.
high-class winds, with speeds .6.4 m s�1) are considered
to be suitable for wind energy development and thus
commercially valuable (NREL 2015).
Statistical AnalysesTo understand condor flight responses to topographic,
vegetative, and temporal variation in updraft potential (i.e.
to test our 2 predictions), we employed a 2-step approach.
First, we graphically evaluated patterns in our raw data by
plotting condor flight altitudes a.g.l. against environmental
and temporal variables and the rotor-swept zone of
modern horizontal-axis wind turbines (~50–150 m a.g.l.,
indicated by light gray shading and a wind turbine graphic
on the plots; http://www.fws.gov/radar/windpower/; Fig-
ures 3–6). The values on these plots were based on
averaged flight altitudes for each bird in our study. We
included on the plots the percentage of locations, averaged
FIGURE 2. Photograph of the landscape used by CaliforniaCondors tracked in southern California, USA, 2013–2015.Average values of the terrain ruggedness index (TRI) are shownfor 3 different areas.
FIGURE 3. Boxplots of altitude above ground level (a.g.l.) in each of 6 landform types for flight locations of 24 California Condorstracked in southern California, USA, 2013–2015. Values are based on flight altitudes averaged for each of the 24 birds within eachlandform type. The top of the box represents the third quartile, the bottom of the box represents the first quartile, the line inside thebox represents the median, and the top and bottom whiskers represent the maximum and minimum averaged values. Averagepercentages of locations in each landform type that were �150 m in altitude a.g.l. (i.e. within or below the rotor-swept zone ofindustrial-scale wind turbines) are shown above each boxplot.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
334 Flight response of California Condors S. A. Poessel, J. Brandt, L. Mendenhall, et al.

by bird and within each category, that were �150 m in
flight altitude (i.e. within or below the rotor-swept zone of
industrial-scale wind turbines). We also used plots to
illustrate potential interactions of month and hour with
each of the 3 spatial data types (TPI, TRI, and land cover).
When we observed an apparent pattern in these plots of
interactions, we included that interaction in statistical
models (below).
Second, we evaluated multivariate relationships within
the data with linear mixed-effects models using the lme4
package (Bates et al. 2015) in R (R Core Team 2015), in
which flight altitude was the response variable. We used a
cube root transformation of the response variable because
it allowed us to most closely meet the distributional
assumptions of our statistical tests (e.g., independence of
the observations and normality of the residuals). We first
tested for multicollinearity in our predictor variables by
computing variance inflation factors (VIFs). A VIF
represents the proportion of variance in one predictor
explained by all other predictors in the model, and a VIF
.3 may indicate a correlated variable (Zuur et al. 2010).
The VIFs of our predictor variables were between 1 and 2
(maximum ¼ 1.5 for the month variable; Supplemental
Material Table S1). Thus, the fixed effects in our models
included sex, age (in years) of the bird at the time of
telemetry data collection, hour of the day and month of the
year as categorical variables, TPI category, TRI value, and
land cover category. We included interactions only for
hour*TRI and month*TRI. Random effects included
individual bird and year. For modeling purposes only, we
rescaled the TRI variable (the only continuous variable) by
subtracting the mean and dividing by 2 times the standard
deviation, because interpretation of model coefficients is
sensitive to the scale of the predictor variables (Gelman
2008).
We ran a global model with all fixed effects and the 2
interaction terms, and then used the dredge function in the
MuMIn package (Barton 2015) in R (R Core Team 2015) to
run all possible submodel combinations (n¼ 208; Grueber
et al. 2011, Doherty et al. 2012). We used Akaike’s
information criterion (AIC) to rank the models and
selected the models with the most support from the data
based on Akaike model weights � 0.01 (Burnham and
Anderson 2002, Anderson 2008). Because our models did
not contain multicollinearity among the predictor vari-
ables (Cade 2015), we then averaged the supported models
(using the zero method; Burnham and Anderson 2002) and
calculated variable importance factors for each fixed effect.
Finally, to place flight responses in the context of
collision risk, we linked flight altitude data to commercial
wind energy development potential by plotting distances
from condor flight locations to high-class winds (Katzner
et al. 2012). We categorized condor locations into 49
equally sized distance intervals of 500 m, ranging from 0 m
to 24,500 m, and we computed skewness and kurtosis of
this frequency distribution and compared it with a normal
distribution using a Kolmogorov-Smirnov test in R (R
Core Team 2015). We then calculated the average
percentage of locations within each distance category that
were �150 m in flight altitude.
RESULTS
Condor TelemetryWe tagged and released 24 condors (14 females, 10 males)
ranging in age from 1 to 33 yr old (x 6 SD¼ 9.4 6 8.4 yr).
For this study, we considered GPS locations collected from
December 2013 to November 2015. During that period, we
tracked condors for a mean of 368 6 152 days (range ¼103–564 days), and the telemetry units collected 534,631
locations. We removed 35% of these locations by
subsampling 30-s data, and, after subsampling the data
and removing poor-quality and captive locations, 312,635
FIGURE 4. Scatterplots of mean (6 SE) altitude above groundlevel in relation to the terrain ruggedness index (TRI) for flightlocations of 24 California Condors tracked in southern California,USA, 2013–2015. Plots are by (A) hour of the day (PacificStandard Time [PST]) and (B) month. Numbers of condorstracked ranged from 8 to 24 in each hour and from 18 to 24 ineach month (see Figure 6 for details).
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
S. A. Poessel, J. Brandt, L. Mendenhall, et al. Flight response of California Condors 335

locations remained for analysis. Of these, 102,950 locations
(33%) met our definition of ‘‘flight locations’’ (x¼ 4,290 6
2,166 locations per condor; range ¼ 905–8,845 locations),
5% of which were locations collected at 30-min intervals.
Condors flew at an average altitude a.g.l. of 295 6 41 m
(Supplemental Material Figure S1), and 24% of flight
locations were below 100 m a.g.l. (range =�50 m to 3,593
m), which was our threshold for determining whether
birds were in flight. Condors flew within 8 km of the
Tehachapi-Mojave Wind Resource Area (Figure 1).
Flight Altitude Responses of Condors: UnivariateComparisonsCondor flight altitude responded to variation in the
updraft potential of the topographic landscape. On
average, condors flew at the highest altitudes a.g.l. (~500m) when over gentle slopes (i.e. flat areas) and the lowest
altitudes (~200 m) when over ridges (i.e. hilltops; Figure
3). Flight altitudes of condors generally decreased with
terrain ruggedness (Figure 4). In most cases, regardless of
where condors were flying, the majority of their average
flight altitudes were above the rotor-swept zone of most
industrial-scale wind turbines (Figures 3 and 4).
Condor flight altitude also responded, but less strongly,
to variation in the updraft potential of the vegetative
landscape. In the 7 land cover types that condors used (see
Supplemental Material Figure S2 for details), they
generally flew highest (~500–600 m) over agricultural
vegetation and open water (Figure 5). Again, in most cases,
regardless of land cover type, the majority of average
condor flight altitudes were above the rotor-swept zone of
industrial-scale wind turbines (Figure 5).
Condors appeared to display an altitudinal response to
daily and seasonal variation in the updraft potential of the
temporal landscape. They tended to fly higher (~330 m)
during the middle of the day, when thermals were
strongest, compared with the mornings and evenings,
when they flew lower (~100–150 m; Figure 6A). The only
times of day when condors regularly flew within the rotor-
swept zone of industrial-scale wind turbines were early in
the morning and late in the day (Figure 6A). Likewise,
condor flight altitudes were, on average, higher during the
warmer months of the year (March–October; ~280–345m) than during the cooler months (November–February;
~230–245 m; Figure 6B), when thermals were relatively
less available. Regardless of month, average flight altitudes
were above the rotor-swept zone of industrial-scale wind
turbines (Figure 6B).
Our plots suggested that condor flight altitude respond-
ed to interacting effects of topographic and temporal
variation in updraft potential at both daily and seasonal
scales (Figure 4). Average flight altitude of condors was
lowest and most variable over rougher terrain early in the
morning and late in the afternoon and highest and least
variable over smoother terrain near midday (Figure 4A and
Supplemental Material Figures S3–S5). Likewise, condors
flew lowest over rougher areas during the winter months
(November–February) and highest over smoother areas
FIGURE 5. Boxplots of altitude above ground level (a.g.l.) in each of 7 land cover types for flight locations of 24 California Condorstracked in southern California, USA, 2013–2015. Values are based on flight altitudes averaged for each of the birds within each landcover type. The top of the box represents the third quartile, the bottom of the box represents the first quartile, the line inside the boxrepresents the median, and the top and bottom whiskers represent the maximum and minimum averaged values. Numbers of condorstracked are shown in parentheses below each land cover type. Average percentages of locations in each land cover type that were�150 m in altitude a.g.l. (i.e. within or below the rotor-swept zone of industrial-scale wind turbines) are shown above each boxplot.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
336 Flight response of California Condors S. A. Poessel, J. Brandt, L. Mendenhall, et al.

during the late summer months (August and September;
Figure 4B and Supplemental Material Figure S3). We also
observed interactions between temporal variables (i.e. hour
and month) and ground elevation (Supplemental Material
Figure S6), but not between other spatial or temporal
variables that we evaluated (Supplemental Material Figures
S2 and S7–S9).
Flight Altitude Responses of Condors: MultivariateComparisonsWe statistically evaluated the patterns elucidated by our
plots with 208 linear mixed-effects models (as described
in the Methods). Only 2 of these models were supported
by the data (Akaike model weights of 79% and 20%; Table
1); both included terms for hour, month, TPI, TRI, and
land cover (Table 1). The only difference between the 2
models was that the less well-supported model included
the term for sex. Neither model included bird age or
interaction terms.
The general patterns that we observed in the non-
inferential univariate plots were replicated in these
inferential statistics. Higher flight altitudes were associated
with flatter and smoother terrain, agricultural vegetation
and open water land cover, and the specific times of day
(late morning to early afternoon) and year (spring,
summer, and fall) when thermal potential was highest
(Supplemental Material Table S2). Additionally, male
condors tended to fly higher than females (Supplemental
Material Table S2). However, the sex effect was weak, so we
do not further discuss or interpret the differences in flight
behavior between the sexes.
Condors and Wind EnergyAlthough the majority of condor flight locations were
above the rotor-swept zone of modern horizontal-axis
wind turbines (150 m a.g.l.), 37% of all flight locations
were below that threshold. Condors also tended to fly
closer than expected to high-class winds (D ¼ 0.72, P ,
0.001; kurtosis¼ 31.22; skewness¼ 4.58). In total, almost
28% of all flight locations were within areas of high-class
winds and 58% of locations (averaged by bird) were
within 500 m of high-class winds (Figure 7). Of the
locations within 500 m of high-class winds, 39% were
�150 m a.g.l. (Figure 7).
DISCUSSION
Our analyses demonstrate strong spatially and temporally
explicit flight responses by an obligate soaring species to
variation in the updraft potential of the topographic and
FIGURE 6. Mean (6 SE) altitude above ground level (a.g.l.) forflight locations of 24 California Condors tracked in southernCalifornia, USA, 2013–2015. Plots are by (A) hour of the day(Pacific Standard Time [PST]) and (B) month. In (A), n ¼ 24condors for each hour except 04:00 (hour 4), when n ¼ 8, 18:00(hour 18), when n¼ 23, and 19:00 (hour 19), when n¼ 17. Hour20 is not shown because we recorded only 1 flight location from1 condor during this hour. In (B), numbers of condors tracked areshown in parentheses below each month. Average percentagesof locations in each hour and month that were �150 m inaltitude a.g.l. (i.e. within or below the rotor-swept zone ofindustrial-scale wind turbines) are shown above each point.
TABLE 1. Top 2 models in model selection explaining influenceson altitude above ground level for flight locations of 24California Condors tracked in southern California, USA, 2013–2015. K refers to the number of parameters (including interceptand error terms) in a model, and �2lnL is the maximized log-likelihood. AIC is Akaike’s information criterion, and DAIC is thedistance in AIC from the top model. Explanatory variables inmodels included the hour of the day (Hour), month of the year(Month), topographic position index (TPI), terrain ruggednessindex (TRI), type of land cover (Land cover), and the sex oftracked condors (Sex).
Model K DAICModelweight �2lnL
Hour, Month, TPI, TRI,Land cover
42 0.0 a 0.789 425,062
Sex, Hour, Month, TPI,TRI, Land cover
43 2.7 0.205 425,063
a The AIC value of the top model was 425,146.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
S. A. Poessel, J. Brandt, L. Mendenhall, et al. Flight response of California Condors 337

vegetative landscape. These novel patterns support our
initial hypothesis in an unexpectedly strong manner and
aid in understanding the mechanisms that determine
soaring flight behavior. When combined with the infor-
mation on behavior in and around commercially valuable
winds, our results provide important insights into the
context in which condors and other soaring species may
encounter collision risk from wind turbines. Importantly,
inference from this study about risk to condors from wind
energy extends only to flying birds, and not to birds on the
ground, where they may encounter other risks.
Flight Responses to Variation in Updraft Potential
Although spatial patterns in flight altitude were consistent
with findings from previous work on other species (e.g.,
Katzner et al. 2012, Reid et al. 2015), the diel and seasonal
cycles that we observed were unexpectedly strong. The
altitudinal response that condors displayed to the updraft
potential of the spatial and temporal landscape that they
encountered illustrates the mechanisms that determine
soaring flight behavior. Because large vultures are heavy
and have high wing loading, they are unable to use flapping
flight for long periods of time (Bildstein et al. 2009). Thus,
when not flying to roost or feed, their flight altitude
depends largely on the spatial and temporal patterns in the
strength of updrafts, which in turn depend on the
interaction of solar radiation and wind with time of day,
topography, and land cover (Hertenstein 2005). Therefore,
we are not surprised that these obligate soaring birds flew
highest over less rough, more open areas around midday
and during summer, when thermals are strongest. By
contrast, lower-altitude soaring, consistent with the use of
orographic updrafts, was observed in rougher terrain and
when thermals tend to be weakest in the early morning
and evening hours and during winter.
The requirement of using updrafts creates multiple
tradeoffs for soaring species. For example, large birds must
simultaneously fly high and fast enough to avoid
grounding (Horvitz et al. 2014), but also low enough to
find food and to approach foraging or roosting opportu-
nities in suitable habitats. When combined with their
tendency to sometimes roost in unvegetated areas (i.e.
cliffs), this may explain why condors flew at relatively low
altitudes during the limited amount of time that they were
over bare or sparsely vegetated ground (0.13% of locations;
Figure 5). By contrast, condors flew higher than expected
over open water (generally small lakes with a low potential
to generate thermals; 0.15% of locations; Figure 5), likely
because water does not provide food for condors and
because of the negative consequences of grounding in
water.
Other aspects of biology almost certainly interact with
updraft potential to influence condor flight behavior. The
models with interactions that we built were penalized (and
thus not well supported) because of the large numbers of
parameters that they contained. Nevertheless, our plots of
FIGURE 7. Distance from high-class winds (wind classes �3, with speeds .6.4 m s�1) from which 24 California Condors tracked insouthern California, USA, 2013–2015, flew. Values shown are average (6 SE) frequencies in each distance category; categories aregrouped into equal 500-m intervals. Labels on the x-axis are the midpoint of each category and sample size per category. The figureindicates that the vast majority of condor flight locations were close to high-class winds. Average percentages of locations in eachcategory that were �150 m in altitude above ground level (i.e. within or below the rotor-swept zone of industrial-scale windturbines) are shown above each bar. Only distances up to 15,250 m are shown because n � 10 at greater distances.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
338 Flight response of California Condors S. A. Poessel, J. Brandt, L. Mendenhall, et al.

interactions (Figure 4 and Supplemental Material Figures
S3 and S6) clearly demonstrate novel interacting effects of
spatial and temporal parameters on flight altitude. These
data show that in the early morning and late afternoon
condors flew lower and over rougher and higher-elevation
terrain (Figure 4 and Supplemental Material Figures S3
and S6). Flight altitude, terrain roughness, and elevation
were also more variable at these times (Supplemental
Material Figures S4–S6). These patterns are consistent
with condors using a diversity of nighttime roosting sites
in the mountains, but generally foraging during daytime
over less rough, lower landscapes (Snyder and Snyder
2000).
Condors flew lower over rougher and lower-elevation
terrain during winter, suggesting the use of orographic
updrafts (Figure 4 and Supplemental Material Figures S3
and S6). These seasonal fluctuations in behavior may be
linked not only to variation in updrafts, but also to
historical shifts in local food availability due to hunting and
ranching cycles (Meretsky and Snyder 1992, Snyder and
Snyder 2000). Although reintroduced condors are provi-
sioned with carcasses (USFWS 2016), historically consis-
tent seasonal foraging patterns likely persist because
condors also utilize natural sources of food throughouttheir range (Meretsky and Snyder 1992, Snyder and Snyder
2000).
Soaring Flight Responses and Wind EnergyThe consistency in flight responses that we observed to
variation in the spatial and temporal landscape illustrates
the collision risk that condors may face from wind
turbines. Condors regularly flew near classes of winds
required by energy developers, and for 39% of the time that
these birds were near such winds, they were flying within
the rotor-swept zone of wind turbines (Figure 7). This
indicates that the flight behavior of condors makes them
vulnerable to collisions with turbines.
The flight altitudes of these heavily wing-loaded birds
responded strongly to the presence of thermal updrafts.
During the daytime and in summer, condors generally flew
at higher altitudes, indicating the use of well-developed
thermals and placing them far above the rotor-swept zone
of most wind turbines. However, these soaring specialists
also used lower-altitude orographic updrafts, especially in
areas with high topographic relief. Our results suggest that,
although they can use these orographic updrafts at any
time, they used them most frequently (1) in mornings and
evenings, presumably when closer to their roost sites, and
(2) during winter, when thermals were weakest. Hence,
these orographic updrafts should generate the greatest
potential for wind energy–wildlife conflicts.
The principles that underpin soaring flight are not
unique to condors (Pennycuick 1972, 1998), and these new
results can inform an understanding of the collision risk
from wind energy development to other obligate soaring
birds. Although no similar analysis of temporal patterns in
flight altitude has been conducted for other species, the
logic underlying our interpretation of these data likely
applies similarly to a suite of obligate soaring birds
globally, many of which are species of conservation
concern and are threatened by wind energy (for example,
but not limited to, Cinereous Vultures, Eurasian Griffons,
Bearded Vultures, Golden Eagles (Aquila chrysaetos),
White-tailed Eagles (Haliaeetus albicilla), and Black
Storks (Ciconia nigra) in Europe, Asia, and Africa, and
Andean Condors (Vultur gryphus) in South America). The
collision risk to these species should also be highest from
turbines placed in areas with high topographic relief or
near nocturnal roosting sites. Many of these species have
high wing loading and low maneuverability, resulting in
high susceptibility to collision with tall moving structures
such as wind turbines (reviewed by Smith and Dwyer
2016). Furthermore, aerial foragers (e.g., Golden Eagles)
that forage near turbines may be at high risk of mortality ifthey focus more on prey than on turbine blades (Small-
wood et al. 2009, Smith and Dwyer 2016). However, unlike
condors, some of these species migrate, and comparisons
with telemetry (Katzner et al. 2012) and observational
(Johnston et al. 2014) studies of migration of soaring birds
suggest that collision risk from wind turbines may be
different during migration than during the more local
movements that we studied here.
Practitioners and wind energy developers can incorpo-
rate the new knowledge gained from this study to place
turbines in areas where collision risk to obligate soaring
birds is lowest. Turbines placed in areas of high
topographic relief, where orographic winds are strongest,
are most likely to interact with local obligate soaring birds.
These turbines are also those at which collision risk may
be most effectively lowered with careful siting decisions.
For example, requiring new wind turbines to be placed a
certain distance (e.g., 100 m) away from a ridgeline with
strong orographic updrafts might reduce collision risk to
soaring birds.
Another option for wind energy developers is to
monitor birds with geofence alert systems incorporated
into telemetry units (Sheppard et al. 2015). These systems
are designed to increase the fix frequency of the telemetry
unit and to send a short message service alert to a user
group when a bird crosses a virtual boundary near a wind
energy facility. Upon receiving the alert, wind facility
operators can implement mitigative actions, such as
curtailing turbine operations. Several telemetry units with
geofence alert systems were deployed on condors in
southern California after our study. However, because the
effectiveness of this measure relies upon placing telemetry
units on a large percentage of the studied population, this
technology may be cost-effective only for small popula-
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
S. A. Poessel, J. Brandt, L. Mendenhall, et al. Flight response of California Condors 339

tions of high-risk species, or those already intensively
monitored.
Postconstruction management of risk to condors and
other species has predominantly focused on operational
mitigation. Thus, the information from seasonally specific
temporal cycles that we have documented here may be a
useful tool for managers making operational mitigation
decisions in areas with existing turbines. More complex
risk models, especially ones that incorporate variation in
weather and the specific flight behaviors of local species,
may be additionally useful for decision-making about
micrositing and mitigation to reduce the potential for wind
energy–wildlife conflicts.
ACKNOWLEDGMENTS
We thank A. Fesnock, A. Blackford, K. Martin, S. Kirkland,and others for their support of this research. The findings andconclusions in this article are those of the authors and do notnecessarily represent the views of the U.S. Fish and WildlifeService. Any use of trade, product, or firm names is fordescriptive purposes only and does not imply endorsement bythe U.S. Government.Funding statement: This work was supported by theCalifornia Department of Fish and Wildlife (CDFW agree-ments P1182024 and P148006), the Bureau of Land Manage-ment (U.S. BLM contract L11PX02237), the National Fish andWildlife Foundation, and the authors’ institutions. None ofthe funders had any input into the content of the manuscriptnor required their approval of the manuscript beforesubmission or publication.Ethics statement: The condor is a federally listed endangeredspecies, and extreme care was taken during all capture andhandling procedures to minimize stress and disturbance. Thisstudy was carried out in strict accordance with therecommendations in the Guidelines to the Use of Wild Birdsin Research of the Ornithological Council. No animal carecommittee reviews research conducted under endangeredspecies recovery permits; therefore, condor field programpermits were reviewed and approved by the USFWS PermitCoordinator, California Condor Coordinator, and Region 8Endangered Species Division. The use of GPS transmitterswas authorized as a recovery action under section 10(a)(1)(A)with a permit issued to the Hopper Mountain NWR Complex(#TE-108507 HMNWR-0). In addition, this work wasauthorized in the state of California under a separateMemorandum of Understanding between managers of theHopper Mountain NWR Complex and the CaliforniaDepartment of Fish and Game under sections 650 and670.7, Title 14, California Code of Regulations.Author contributions: S.A.P. and T.E.K. designed the study;J.B. and L.M. handled and attached telemetry units tocondors; M.A.B. and L.M. organized telemetry data andmaintained the telemetry database; M.J.L. and A.J.M. designedthe telemetry units; S.A.P. analyzed the data; S.A.P. and T.E.K.led the writing; and all authors contributed to revising andimproving the manuscript.
LITERATURE CITED
Anderson, D. R. (2008). Model Based Inference in the LifeSciences: A Primer on Evidence. Springer, New York, NY, USA.
Arnett, E. B., W. K. Brown, W. P. Erickson, J. K. Fiedler, B. L.Hamilton, T. H. Henry, A. Jain, G. D. Johnson, J. Kerns, R. R.Koford, C. P. Nicholson, et al. (2008). Patterns of bat fatalitiesat wind energy facilities in North America. The Journal ofWildlife Management 72:61–78.
AWEA (American Wind Energy Association) (2017). U.S. WindIndustry Fourth Quarter 2017 Market Report. American WindEnergy Association, Washington, DC, USA. http://www.awea.org/4q2017
Barrios, L., and A. Rodrıguez (2004). Behavioural and environ-mental correlates of soaring-bird mortality at on-shore windturbines. Journal of Applied Ecology 41:72–81.
Barton, K. (2015). MuMIn: Multi-model inference. R packageversion 1.15.1. http://CRAN.R-project.org/package¼MuMIn
Bates, D., M. Machler, B. M. Bolker, and S. C. Walker (2015). Fittinglinear mixed-effects models using lme4. Journal of StatisticalSoftware 67:1–48.
Bildstein, K. L., M. J. Bechard, C. Farmer, and L. Newcomb (2009).Narrow sea crossings present major obstacles to migratingGriffon Vultures Gyps fulvus. Ibis 151:382–391.
BLM (Bureau of Land Management) (2016). Desert RenewableEnergy Conservation Plan: BLM Record of Decision, Land UsePlan Amendment, and Environmental Impact Statement.http://www.drecp.org/finaldrecp/
Burnham, K. P., and D. R. Anderson (2002). Model Selection andMultimodel Inference: A Practical Information-Theoretic Ap-proach, second edition. Springer-Verlag, New York, NY, USA.
Cade, B. S. (2015). Model averaging and muddled multimodelinferences. Ecology 96:2370–2382.
Carrete, M., J. A. Sanchez-Zapata, J. R. Benıtez, M. Lobon, and J.A. Donazar (2009). Large scale risk-assessment of wind-farmson population viability of a globally endangered long-livedraptor. Biological Conservation 142:2954–2961.
Carrete, M., J. A. Sanchez-Zapata, J. R. Benıtez, M. Lobon, F.Montoya, and J. A. Donazar (2012). Mortality at wind-farms ispositively related to large-scale distribution and aggregationin Griffon Vultures. Biological Conservation 145:102–108.
Chevallier, D., Y. Handrich, J.-Y. Georges, F. Baillon, P. Brossault,A. Aurouet, Y. Le Maho, and S. Massemin (2010). Influence ofweather conditions on the flight of migrating Black Storks.Proceedings of the Royal Society B 277:2755–2764.
Dahl, E. L., K. Bevanger, T. Nygard, E. Røskaft, and B. G. Stokke(2012). Reduced breeding success in White-tailed Eagles atSmøla windfarm, western Norway, is caused by mortality anddisplacement. Biological Conservation 145:79–85.
de Lucas, M., M. Ferrer, M. J. Bechard, and A. R. Munoz (2012).Griffon Vulture mortality at wind farms in southern Spain:Distribution of fatalities and active mitigation measures.Biological Conservation 147:184–189.
de Lucas, M., G. F. E. Janss, D. P. Whitfield, and M. Ferrer (2008).Collision fatality of raptors in wind farms does not depend onraptor abundance. Journal of Applied Ecology 45:1695–1703.
D’Eon, R. G., and D. Delparte (2005). Effects of radio-collarposition and orientation on GPS radio-collar performance,and the implications of PDOP in data screening. Journal ofApplied Ecology 42:383–388.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
340 Flight response of California Condors S. A. Poessel, J. Brandt, L. Mendenhall, et al.

Dilts, T. E. (2015). Topography Tools for ArcGIS 10.3. http://www.arcgis.com/home/item.html?id¼b13b3b40fa3c43d4a23a1a09c5fe96b9
Doherty, P. F., G. C. White, and K. P. Burnham (2012). Comparisonof model building and selection strategies. Journal ofOrnithology 152 (Suppl. 2):S317–S323.
Drewitt, A. L., and R. H. W. Langston (2006). Assessing theimpacts of wind farms on birds. Ibis 148:29–42.
Evans, J. S., J. Oakleaf, S. A. Cushman, and D. Theobald (2014). AnArcGIS toolbox for surface gradient and geomorphometricmodeling, version 2.0-0. http://evansmurphy.wixsite.com/evansspatial
Gelman, A. (2008). Scaling regression inputs by dividing by twostandard deviations. Statistics in Medicine 27:2865–2873.
Grueber, C. E., S. Nakagawa, R. J. Laws, and I. G. Jamieson (2011).Multimodel inference in ecology and evolution: Challengesand solutions. Journal of Evolutionary Biology 24:699–711.
Hertenstein, R. (2005). Thermals. Bob Wander’s Gliding MentorSeries, Soaring Books & Supplies, Minneapolis, MN, USA.
Horvitz, N., N. Sapir, F. Liechti, R. Avissar, I. Mahrer, and R. Nathan(2014). The gliding speed of migrating birds: Slow and safe orfast and risky? Ecology Letters 17:670–679.
Jenness, J., B. Brost, and P. Beier (2013). Land Facet CorridorDesigner: Extension for ArcGIS, v.1.2.884. Jenness Enterprises,Flagstaff, AZ, USA. http://www.jennessent.com/arcgis/land_facets.htm
Johnston, N. N., J. E. Bradley, and K. A. Otter (2014). Increasedflight altitudes among migrating Golden Eagles suggestturbine avoidance at a Rocky Mountain wind installation.PLOS One 9:e93030.
Katzner, T. E., D. Brandes, T. Miller, M. Lanzone, C. Maisonneuve,J. A. Tremblay, R. Mulvihill, and G. T. Merovich, Jr. (2012).Topography drives migratory flight altitude of Golden Eagles:Implications for on-shore wind energy development. Journalof Applied Ecology 49:1178–1186.
Katzner, T. E., P. J. Turk, A. E. Duerr, T. A. Miller, M. J. Lanzone, J. L.Cooper, D. Brandes, J. A. Tremblay, and J. Lemaıtre (2015).Use of multiple modes of flight subsidy by a soaringterrestrial bird, the Golden Eagle Aquila chrysaetos, whenon migration. Journal of the Royal Society Interface 12:20150530.
Loss, S. R., T. Will, and P. P. Marra (2013). Estimates of birdcollision mortality at wind facilities in the contiguous UnitedStates. Biological Conservation 168:201–209.
Madders, M., and D. P. Whitfield (2006). Upland raptors and theassessment of wind farm impacts. Ibis 148:43–56.
Mee, A., and L. S. Hall (Editors) (2007). California Condors in the21st Century. Series in Ornithology, No. 2, The NuttallOrnithological Club, Cambridge, MA, USA, and The AmericanOrnithologists’ Union, Washington, DC, USA.
Meretsky, V. J., and N. F. R. Snyder (1992). Range use andmovements of California Condors. The Condor 94:313–335.
Myers, N., R. A. Mittermeier, C. G. Mittermeier, G. A. B. daFonseca, and J. Kent (2000). Biodiversity hotspots forconservation priorities. Nature 403:853–858.
NREL (National Renewable Energy Laboratory) (2015). GeospatialData Science: Wind Data. National Renewable EnergyLaboratory, U.S. Department of Energy, Office of EnergyEfficiency and Renewable Energy, Washington, DC, USA.https://www.nrel.gov/gis/data-wind.html
Pennycuick, C. J. (1972). Soaring behavior and performance ofsome east African birds, observed from a motor-glider. Ibis114:178–218.
Pennycuick, C. J. (1998) Field observations of thermals andthermal streets, and the theory of cross-country soaringflight. Journal of Avian Biology 29:33–43.
Peron, G., C. H. Fleming, O. Duriez, J. Fluhr, C. Itty, S. Lambertucci,K. Safi, E. L. C. Shepard, and J. M. Calabrese (2017). The energylandscape predicts flight height and wind turbine collisionhazard in three species of large soaring raptor. Journal ofApplied Ecology 54:1895–1906.
R Core Team (2015). R: A Language and Environment forStatistical Computing. R Foundation for Statistical Comput-ing, Vienna, Austria. http://www.R-project.org
Reid, T., S. Kruger, D. P. Whitfield, and A. Amar (2015). Usingspatial analyses of Bearded Vulture movements in southernAfrica to inform wind turbine placement. Journal of AppliedEcology 52:881–892.
Riley, S. J., S. D. DeGloria, and R. Elliot (1999). A terrainruggedness index that quantifies topographic heterogeneity.Intermountain Journal of Sciences 5:23–27.
Sheppard, J. K., A. McGann, M. Lanzone, and R. R. Swaisgood(2015). An autonomous GPS geofence alert system to curtailavian fatalities at wind farms. Animal Biotelemetry 3:art.43.
Smallwood, K. S., and C. Thelander (2008). Bird mortality in theAltamont Pass Wind Resource Area, California. The Journal ofWildlife Management 72:215–223.
Smallwood, K. S., L. Rugge, and M. L. Morrison (2009). Influenceof behavior on bird mortality in wind energy developments.The Journal of Wildlife Management 73:1082–1098.
Smith, J. A., and J. F. Dwyer (2016). Avian interactions withrenewable energy infrastructure: An update. The Condor:Ornithological Applications 118:411–423.
Snyder, N., and H. Snyder (2000). The California Condor: A Sagaof Natural History & Conservation. Academic Press, SanDiego, CA, USA.
USFWS (U.S. Fish and Wildlife Service) (2016). Hopper MountainNational Wildlife Refuge Complex: California Condor Recov-ery Program 2016 Annual Report. U.S. Fish and WildlifeService, Ventura, CA, USA. https://www.fws.gov/uploadedFiles/Region_8/NWRS/Zone_1/Hopper_Mountain_Complex/Hopper_Mountain/Sections/What_We_D o /Conservation/PDFs/2016%20Annual%20HMNWRC%20Condor%20Field%20Report_Final%20_20JUNE2017%20(1).pdf
USFWS (U.S. Fish and Wildlife Service) (2017). California CondorRecovery Program: 2017 Annual Population Status. U.S. Fishand Wildlife Service, Ventura, CA, USA. https://www.fws.gov/cno/es/CalCondor/PDF_files/2017-CA-condor-population-status.pdf
Vasilakis, D. P., D. P. Whitfield, S. Schindler, K. S. Poirazidis, and V.Kati (2016). Reconciling endangered species conservationwith wind farm development: Cinereous Vultures (Aegypiusmonachus) in south-eastern Europe. Biological Conservation196:10–17.
Walters, J. R., S. R. Derrickson, D. M. Fry, S. M. Haig, J. M. Marzluff,and J. M. Wunderle, Jr. (2010). Status of the California Condor(Gymnogyps californianus) and efforts to achieve its recovery.The Auk 127:969–1001.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
S. A. Poessel, J. Brandt, L. Mendenhall, et al. Flight response of California Condors 341

Zimmerling, J. R., and C. M. Francis (2016). Bat mortality due towind turbines in Canada. The Journal of Wildlife Manage-ment 80:1360–1369.
Zimmerling, J. R., A. C. Pomeroy, M. V. d’Entremont, and C. M.Francis (2013). Canadian estimate of bird mortality due to
collisions and direct habitat loss associated with wind turbinedevelopments. Avian Conservation and Ecology 8:art.10.
Zuur, A. F., E. N. Ieno, and C. S. Elphick (2010). A protocol for dataexploration to avoid common statistical problems. Methodsin Ecology and Evolution 1:3–14.
The Condor: Ornithological Applications 120:330–342, Q 2018 American Ornithological Society
342 Flight response of California Condors S. A. Poessel, J. Brandt, L. Mendenhall, et al.
Recommended