1
Proiectarea optimală a
masinilor electrice
Titular: Conf. dr. ing. Tiberiu Tudorache
Structura cursului: 28 ore = 14 saptamani x 2 ore
Structura aplicatiilor: 28 ore = 14 saptamani x 2 ore
Mod de evaluare/pondere: Aplicatii 50%, Examen final 50%.
2
Dobandirea cunostintelor teoretice de baza privind
metodele clasice de proiectare a masinilor electrice cat
si tehnicile moderne de optimizare constructiv-
functionala utilizand mijloace avansate de analiza in
element finit.
Abordarea moderna a dimensionarii masinilor electrice
avand la baza utilizarea mijloacelor de investigatie
numerica de tip element finit permit luarea in calcul a
unor efecte complexe de natura electromagnetica (de
ex. armonici de dantura, forme geometrice complexe a
miezurilor magnetice, refularea curentului in
conductoare masive, influenta neliniaritatior magnetice,
etc.), dificil de considerat prin metode clasice de
analiza.
Obiectivele cursului
3
Cuprinsul cursului
1. Elemente de baza in proiectarea masinilor
electrice
2. Metode de dimensionare si optimizare a
masinilor electrice
3. Rezolvarea prin MEF a problemelor de camp
electromagnetic si termic
4. Proiectarea optimala a masinilor asincrone
4
1. ELEMENTE DE BAZA IN PROIECTAREA
MASINILOR ELECTRICE
1.1. Introducere
Masina electrica reprezinta principalul consumator de energie
electrica al economiei mondiale. Se estimeaza ca peste 40% din
energia electrica produsa la nivel mondial este consumata de
motoare electrice si sisteme de actionare electrica [1].
Masinile electrice sunt utilizate in aplicatii diverse, incepand cu
puteri de ordinul mW pana la puteri de ordinul sutelor de MW.
Deseori masinile electrice trebuie sa raspunda unor cerinte tot
mai ridicate precum:
- Nivel de performanta ridicat (ex. randament superior, cupluri
ridicate, turatii foarte mici sau foarte mari etc.),
- Fiabilitate superioara,
- Volum gabaritic redus,
- Pret competitiv etc.
5
Proiectarea si optimizarea constructiv-functionala a masinilor
electrice reprezinta in contextul intensificarii concurentei
economice o preocupare continua a inginerilor specialisti.
Evolutia in domeniul proiectarii si constructiei masinilor
electrice are la baza aparitia de:
- Noi materiale cu proprietati superioare,
- Noi tehnologii de prelucrare si de fabricatie,
- Noi sisteme electronice de comanda ce permit controlul miscarii
in timp real, la niveluri de putere tot mai ridicate,
- Noi metode numerice de calcul, analiza si optimizare, asistate in
intregime de calculator, ce permit estimarea cu precizie a
performantelor prototipurilor.
1800 2000 1900
Sursa: http://commons.wikimedia.org
6
Evolutia in domeniul proiectarii
In trecut proiectarea avea la baza experienta practica, flerul,
respectiv formule de calcul analitic simple, valabile in anumite
ipoteze simplificatoare. Modelele de calcul erau usor de rulat, dar
deseori imprecise, necesitand multe prototipuri realizate.
In prezent dezvoltarea tehnicii de calcul a permis aparitia de
pachete de programe profesionale de calcul numeric 2D/3D cu
nivel ridicat de generalitate si precizie, capabile sa ia in
considerare aspecte complexe precum neliniaritati magnetice,
armonici de dantura, cuplaje camp-circuit-miscare-comanda etc.
In noul context precizia de calcul a sporit foarte mult permitand
diminuarea numarului de prototipuri construite premergator
lansarii in fabricatie de serie a produsului.
In prezent se pot analiza fenomene tot mai complexe ce fac apel
la cuplaje multifizica de tipul electromagnetism – camp termic –
hidrodinamica; electromagnetism – deformare etc. evident cu
pretul unor eforturi de calcul tot mai importante.
Se estimeaza ca in viitorul apropiat nu va exista nici o unealta de
proiectare cu grad ridicat de generalitate si precizie care sa
permita un calcul precis in timp foarte scurt pe PC-uri obisnuite.
7
1.1.1. Ce este masina electrica ?
Masina electrica este un convertor electromecanic ce transforma
energia electrica in energie mecanica (in regim de motor), sau
energia mecanica in energie electrica (in regim de generator).
Masina electrica este utilizata uneori si in regimuri speciale
precum regimul de frana (primeste si energie electrica si mecanica
si le transforma in caldura) sau de compensator (motor sincron
supraexcitat)
In categoria masinilor electrice este inclus uzual si
transformatorul electric desi acesta este un convertor
electromagnetic (fara miscare). Teoria sa de functionare se
aseamana cu cea a mașinilor electrice. Transformatorul electric nu
va fi tratat in acest curs.
Conversia energiei in masina electrica are loc in prezenta
campului magnetic avand la baza principii fundamentale precum:
legea inductiei electromagnetice, legea circuitului magnetic, efecte
ponderomotoare in campuri magnetice, etc.
Campul magnetic in masinile electrice poate fi produs de catre:
-Bobine parcurse de c.c. sau c.a. (camp mg. constant sau variabil),
-Magneti permanenti (camp magnetic constant).

8
1.1.2. Clasificarea masinilor electrice
Dupa felul curentului si dupa principiul de functionare distingem:
-Masini de curent continuu,
-Masini de curent alternativ (masini asincrone, masini sincrone, etc.).
Functie de tipul constructiv:
-Masini in constructie normala cu rotor interior,
-Masini in constructie inversata cu rotor exterior.
Dupa tipul miscarii armaturii mobile:
-Masini rotative,
-Masini liniare.
Masinile de curent alternativ se pot clasifica functie de nr. de faze:
-Masini monofazate,
-Masini bifazate,
-Masini trifazate,
-Masini polifazate.
Functie de orientarea fluxului magnetic:
-Masini cu flux magnetic radial,
-Masini cu flux magnetic axial,
-Masini cu flux magnetic transversal.
Etc.

9
1.1.3. Ce inseamna a proiecta o masina electrica ?
A proiecta o masina electrica inseamna a determina prin calcul
sau a alege pe baza unei anumite experiente anterioare toate
elementele care concura la definirea structurii constructiv-
functionale a masinii, (ex. forma geometrica, dimensiuni,
parametri, materiale etc.), avand in vedere posibilitatile tehnice si
tehnologice de fabricare a fiecarei parti componente si a
ansamblului masinii, plecand de la anumite date initiale, cerinte
de exploatare si alte informatii formulate in tema de proiectare
(date minimale Pn, U1n, nn).
Dimensionarea masinilor electrice face apel la metodologii
specifice de proiectare care pot avea la baza modele analitice,
modele numerice sau o combinatie a celor doua.

10
Materialele utilizate in constructia masinilor electrice se aleg asa
incat masinile sa corespunda dpdv functional, tehnic si economic
cerintelor impuse.
Materialele utilizate in constructia masinilor electrice sunt de
mai multe tipuri:
-Electroconductoare (cupru, aluminiu, alama, aliaje etc.),
-Magnetice (tole din otel magnetic, otel, ferite etc.),
-Electroizolante (fibre textile, mica, polietilena etc.),
-Altele (de pilda otelul si fonta pt. consolidare mecanica, etc.).
Criterii ce trebuie respectate in alegerea materialelor:
-Sa admita solicitari cat mai mari (electrice, magnetice, termice,
mecanice),
-Sa prezinte o fiabilitate cat mai ridicata (durata lunga de viata),
-Sa poate fi usor prelucrate prin procedee tehnologice uuzale,
-Sa fie cat mai ieftine.
1.2. Materiale utilizate in constructia masinilor electrice

11
Dpdv magnetic, materialele se impart in mai multe categorii:
- Materiale diamagnetice mr < 1; mr → 1
- Materiale paramagnetice mr ≥ 1; mr → 1
- Materiale feromagnetice mr > 1
unde:
- mr reprezinta permeabilitatea magnetica relativa (B = mr. m0
. H),
- B este inductia magnetica,
- H intensitatea campului magnetic.
Circuitele magnetice pot fi:
- Parcurse de flux magnetic constant in timp (ex. miezul magnetic
rotoric la masina sincrona),
- Parcurse de flux magnetic variabil in timp (ex. miezul statoric la
masina asincrona).
1.2.1. Materiale feromagnetice pentru circuite magnetice
12
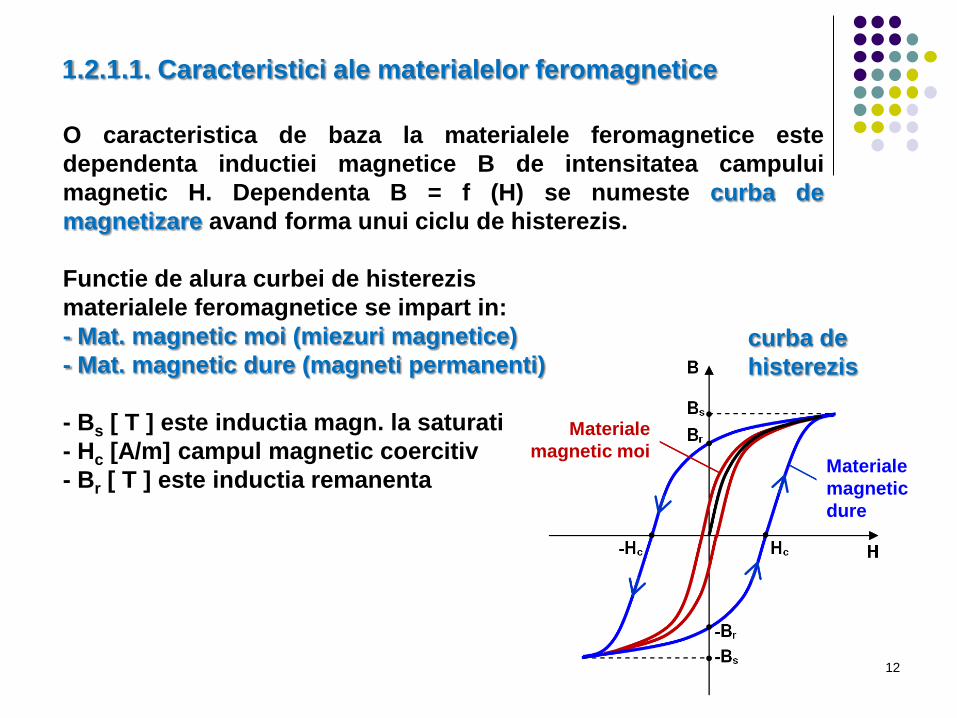
O caracteristica de baza la materialele feromagnetice este
dependenta inductiei magnetice B de intensitatea campului
magnetic H. Dependenta B = f (H) se numeste curba de
magnetizare avand forma unui ciclu de histerezis.
Functie de alura curbei de histerezis
materialele feromagnetice se impart in:
- Mat. magnetic moi (miezuri magnetice)
- Mat. magnetic dure (magneti permanenti)
- Bs [ T ] este inductia magn. la saturatie
- Hc [A/m] campul magnetic coercitiv
- Br [ T ] este inductia remanenta
1.2.1.1. Caracteristici ale materialelor feromagnetice
curba de
histerezis
Materiale
magnetic moi Materiale
magnetic
dure
13
- Permeabilitate magnetica relativa cat mai mare,
- Inductie la saturatie cat mai mare,
- Pierderi specifice cat mai reduse (prin histerezis si prin curenti
turbionari) in cazul miezurilor cu flux magnetic variabil in timp,
- Tehnologie de realizare cat mai ieftina,
- Rezistenta mecanica adecvata.
1.2.1.3. Materiale utilizate pentru miezuri cu flux constant
- Otel laminat cu grosime intre 0.5 – 50 mm,
- Otel si fonta turnate,
- Otel forjat.
1.2.1.4. Materiale utilizate pentru miezuri cu flux variabil
- Tole din tabla silicioasa (fier-carbon-siliciu) laminate la rece cu
cristale neorientate, uzual cu grosime 0.5 mm, izolate cu lacuri
sau cu oxizi
- Materiale magnetic moi compozite.
1.2.1.2. Proprietati optime pentru materiale feromagnetice

14
1.2.1.4. De ce folosim materiale feromag. in masini electrice ?
Sa consideram o bobina de lungime infinita. Selectam o
portiune de lungime L (delimitat de punctele A si B) ca in figura.
Pentru a produce un camp magnetic de inductie impusa Bi in
volumul bobinei considerate curentul prin bobina se noteaza cu
Iaer daca in interiorul bobinei se afla aer si IFe daca bobina are miez
feromagnetic.

15
NIFe NIaer
HNI NI
B
H
B=f(H) in miezuri
feromagnetice
B=f(H) in aer
Bi
Solenația necesara pentru a produce un câmp de inducție
magnetica impusa Bi in aer sau când se folosesc miezuri
magnetice

16
Materialele utilizate pentru infasurari trebuie in primul rand sa
aiba rezistivitate electrica cat mai mica pentru reducerea
pierderilor Joule; Pj = RI2 =(rL/S)I2.
Cele mai utilizate materiale sunt cuprul (Cu) si aluminiul (Al). Se
mai folosesc si aliaje precum: alama, bronzul, staniul, hidronaliul,
siluminiul etc.
Pentru conductoare supuse la eforturi mecanice importante se
alege o varianta de material cu grad mai ridicat de ecruisare [2].
Coliviile rotorice la masinile asincrone se construiesc uzual din
Al, (recent si din Cu) prin turnare sub presiune sau prin sudarea
barelor rotorice de inelele frontale.
Conductoarele de bobinaj sunt standardizate, avand forma
rotunda sau profilata si se folosesc in varianta izolata (email, fibre
textile etc.).
1.2.2. Materiale conductoare pentru infasurari

17
Proprietati importante ale Al si Cu folosit la infasurari
Cu (20 grade):
Rezistivitate electrica: r = 1.784.10-8 Wm;
Densitate: g = 8890 kg/m3;
Coeficientul de temperatura: a = 3.81.10-3 ºC-1;
Efortul unitar admisibil la intindere la rupere: sar = 210 – 450 MPa
Al (20 grade):
Rezistivitate electrica: r = 3.1.10-8 Wm;
Densitate: g = 2700 kg/m3;
Coeficientul de temperatura: a = 3.7.10-3 ºC-1;
Efortul unitar admisibil la intindere la rupere: sar = 70 – 230 MPa.
Rezistivitatea electrica variaza cu temperatura:
rq = r20 [ 1 + a (q – 20)]
18
Conductoarele masinilor electrice se izoleaza utilizand materiale
cu proprietati electroizolante. Acestea pot fi materiale naturale
(lemn, mica, etc.) sau sintetice (emailuri, fibre de sticla, rasini
epoxidice, prespan, sticlotextolit, pertinax, etc.) [2].
In unele cazuri se folosesc izolatii combinate, de pilda fibre de
sticla lacuita sau impregnata cu rasina sintetica, micabanda
preimpregnata etc.
Izolatiile se aleg in functie de nivelul de tensiune la care
lucreaza masina si functie de clasa termica pentru care se
proiecteaza aceasta.
1.2.3. Materiale electroizolante

19
- Masinile electrice opereaza in diverse conditii de lucru in ceea ce
priveste posibilitatea patrunderii de corpuri solide straine, a
pericolului ce-l reprezinta atingerea partilor aflate sub tensiune
sau care se rotesc precum si posibilitatea patrunderii apei. Astfel
masinile electrice sunt caracterizate de grade sau tipuri de
protectie [2].
- Tipurile normale de protectie ale masinilor electrice sunt
standardizate si se simbolizeaza prin caracterele IP (International
Protection) urmate de doua cifre:
- prima cifra semnifica tipul de protectie contra atingerilor si
contra patrunderii corpurilor solide straine,
- a doua cifra se refera la tipul de protectie contra patrunderii apei.
Exemplu de simbolizare: IP 56
- In cazuri speciale in simbolizare mai apare un caracter
suplimentar. De exemplu: IP 55 S, IP W 23, etc.
1.3. Protectia si racirea masinilor electrice
1.3.1. Tipuri de protectie la masinile electrice rotative
in repaus, in conditii meteo speciale

20
1.3.2. Clasificarea tipurilor normale de protectie ale
masinilor electrice rotative
Simbolizare: IP xy x ϵ {0 ... 6} si reprezinta gradul de protectie contra atingerii sau patrunderii corpurilor straine
y ϵ {0 ... 8} si reprezinta gradul de protectia contra patrunderii apei
0 Fara protectie
1 Prot. la
patrunderea
corpurilor straine
solide mai mari
decat
50 mm
2 12 mm
3 2,5 mm
4 1 mm
5 Protejat partial contra
patrunderii prafului
6 Protejat total contra patrunderii
prafului
0 Fara protectie
1 Protej. contra picaturilor de apa cazute vertical
2 Protej. contra picaturilor de apa cazute sub un
unghi de max. 15° fata de verticala
3 Protej. contra picaturilor de apa cazute sub un
unghi de max. 60° fata de verticala
4 Protej. contra picaturilor de apa din orice directie
5 Protej. contra jeturilor de apa sub presiune
6 Protej. contra conditiilor de pe nave
7 Protej. contra imersarii temporare sub apa la
adancimea de 1 m
8 Protejat total (submersibil)
Protectie contra patrunderii apei (y)
Protectie contra atingerii sau
patrunderii corpurilor solide (x)
Exemple de tipuri de protectie in cazul
masinilor electrice rotative: IP00, IP21,
IP22, IP44, IP55, IP56 etc.

21
1.3.2. Racirea masinilor electrice
Evacuarea corespunzatoare a caldurii in exces din masina
electrica (racirea masinii) este extrem de importanta in
exploatarea optima a acesteia.
Caldura in exces care se dezvolta in diferitele parti ale masinii
(de ex. miezul feromagnetic in care se disipa pierderi prin curenti
turbionari si prin histerezis, infasurarile masinii in care se disipa
pierderi prin efect Joule, lagarele in care se disipa pierderi prin
frecare etc.) se evacueaza prin mecanisme specifice de transfer
termic prin conductie, convectie si radiatie.
Supraincalzirea masinii electrice poate conduce la o imbatranire
accelerata a sistemului sau de izolatie (cea mai sensibila
componenta dpdv termic a masinii electrice) si la reducerea
drastica a duratei sale de viata.
22
Tipul de racire/ventilatie adoptat in cazul masinilor electrice
rotative se defineste in faza de proiectare a acestora, in corelatie
cu:
- Solicitarile electromagnetice la care sunt supuse,
- Clasa termica,
- Tipul de protectie adoptat,
- Specificul zonei in care sunt exploatate (altitudine, regiune
geografica),
- Etc.
Dupa tipul de ventilatie se disting masini cu:
- Ventilatie naturala,
- Ventilatie fortata (autoventilatie sau ventilatie independenta).
Dupa natura agentului de racire se disting masini racite cu:
- Gaz (aer sau hidrogen),
- Lichid (uzual apa).

23
1.3.2.1. Masini cu ventilatie naturala
In cazul masinilor cu ventilatie naturala evacuarea caldurii
datorata pierderilor are la baza fenomenele de conductie,
convectie naturala si radiatie fara utilizarea altor elemente
specifice destinate acestui scop (ex. nervuri longitudinale,
ventilatoare etc.).
La masinile cu ventilatie naturala solicitarile electrice si
magnetice se aleg mai mici cu circa 10- 20% decat la masinile
inchise prevazute cu ventilatie fortata [2].
O contributie naturala la evacuarea caldurii o are rotorul masinii
aflat in miscare (prin rotatie se creeaza un curent de aer).
Masinile cu ventilatie naturala sunt in general:
- Masini de puteri mici,
- Masini cu grad de protectie IP 00 care sunt racite suficient ca
urma a constructiei deschise.

24
1.3.2.2. Masini cu ventilatie fortata
Evacuarea caldurii din masina electrica provenita din pierderi
se face de regula folosind ventilatoare montate pe axul masinii.
Aerul din interiorul masini incalzit prin contact cu zonele calde
este impins afara si inlocuit cu aer mai rece provenit din mediul
ambiant.
Ventilatorul este in general antrenat de masina insasi, sistemul
fiind in acest caz unul cu autoventilatie. Uneori ventilatorul este
alimentat de la o sursa separata de energie (de ex. in sisteme de
actionare cu turatie variabila in care turatia masinii scade in mod
frecvent sub o anumita limita, devenind astfel insuficienta pt. a
evacua caldura)
Variante de ventilatie fortata dupa modul de circulatie al aerului
in masina:
- Autoventilatie fortata axiala,
- Autoventilatie fortata radiala.
25
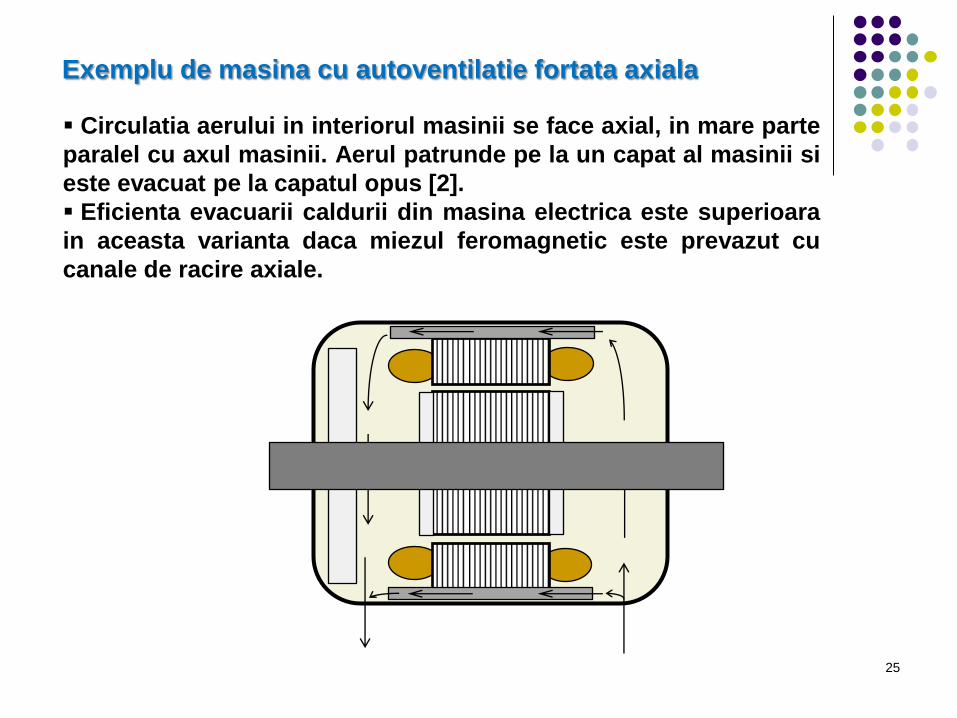
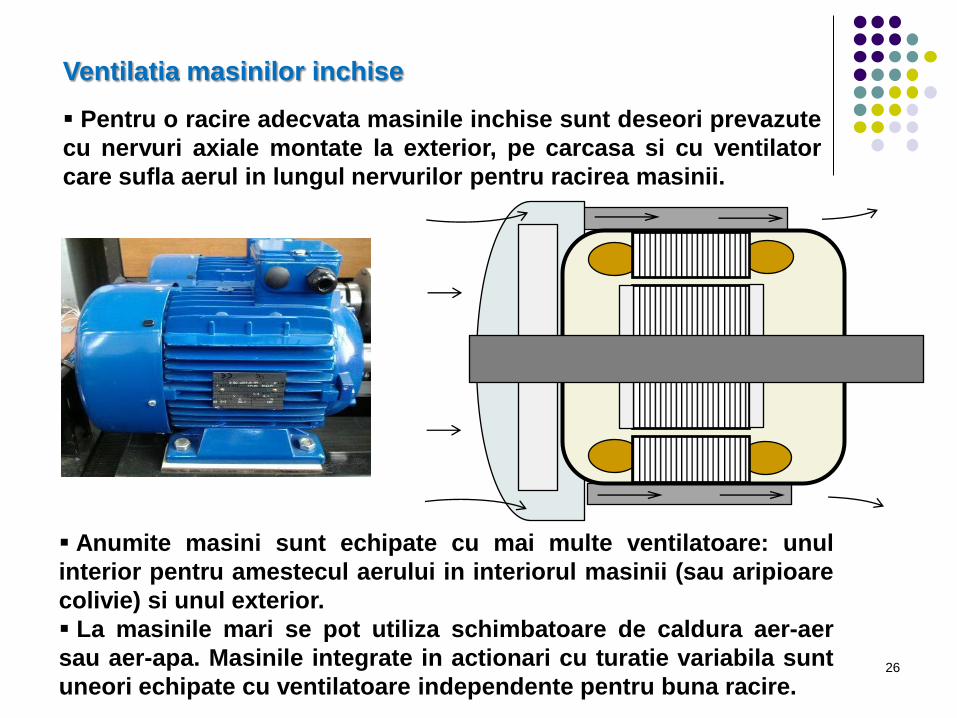
Exemplu de masina cu autoventilatie fortata axiala
Circulatia aerului in interiorul masinii se face axial, in mare parte
paralel cu axul masinii. Aerul patrunde pe la un capat al masinii si
este evacuat pe la capatul opus [2].
Eficienta evacuarii caldurii din masina electrica este superioara
in aceasta varianta daca miezul feromagnetic este prevazut cu
canale de racire axiale.
26
Ventilatia masinilor inchise
Pentru o racire adecvata masinile inchise sunt deseori prevazute
cu nervuri axiale montate la exterior, pe carcasa si cu ventilator
care sufla aerul in lungul nervurilor pentru racirea masinii.
Anumite masini sunt echipate cu mai multe ventilatoare: unul
interior pentru amestecul aerului in interiorul masinii (sau aripioare
colivie) si unul exterior.
La masinile mari se pot utiliza schimbatoare de caldura aer-aer
sau aer-apa. Masinile integrate in actionari cu turatie variabila sunt
uneori echipate cu ventilatoare independente pentru buna racire.

27
1.4. Parti constructive, dimensiuni geometrice principale
si ideale
Partile principale ale unei masini electrice dpdv. constructiv sunt:
- Partea fixa: stator si elementele de sustinere,
- Partea mobila: rotor si alte elemente constructive specifice aflate
in miscare de rotatie precum arbore, ventilatoare etc.
Anumite elemente si detalii constructive ale masinilor electrice
pot depinde de mai multi factori precum:
- Date nominale,
- Forma constructiva,
- Tipul de protectie,
- Sistemul de racire,
- Conditiile de exploatare, etc.
1.4.1. Parti constructive principale

28
1.4.1.1. Statorul masinilor de c.a. include:
-Miezul magnetic statoric alcatuit din tole din otel electrotehnic
obtinute uzual prin stantare, avand grosimea de 0.5 mm, izolate cu
lacuri sau cu oxizi si crestate spre intrefier;
-Infasurarile statorice sunt uzual de tip repartizat, realizate in
structura trifazata, din conductor de cupru izolat (rotund, profilat
sau din bare); bobinele infasurarilor sunt izolate intre ele si izolate
fata de miez si fata de alte elemente contructive;
-Carcasa masinii (inclusiv nervurile longitudinale, talpile de fixare,
inele de ridicare etc.) obtinuta prin turnare din fonta, otel sau aliaje
ale aluminiului sau din tabla de otel sudata.
-Scuturile frontale utilizate pentru centrarea si sustinerea rotorului
fata de stator; acestea se realizeaza de regula prin turnare din otel,
fonta sau din aliaje ale aluminiului.
-Cutia de borne care permite realizarea conexiunilor electrice intre
infasurarile masinilor electrice si retea; bornele se executa din
alama, cupru sau otel cu acoperiri galvanice (zincare).
-Periile, sistemul portperii si suportii portperii care permit
conexiunea electrica intre infasurarile rotorice si bornele masinii;
periile se executa uzual din grafit natural, materiale compozite pe
baza de grafit, carbune amorf, electrografit sau pulberi
metalografitice (cupru sau bronz grafitate).

29
1.4.1.1. Statorul masinilor de c.a.
Sursa: http://commons.wikimedia.org
30
1.4.1.2. Rotorul masinilor asincrone include:
-Miezul magnetic rotoric alcatuit din tole din otel electrotehnic
obtinute uzual prin stantare, avand grosimea de 0.5 mm, izolate sau
neizolate si crestate spre intrefier;
-Infasurarile rotorice de tip repartizat sau de tip colivie; infasurarile
repartizate sunt realizate uzual in structura trifazata, din conductor de
cupru izolat (rotund, profilat sau din bare); bobinele sunt izolate intre
ele si izolate fata de miez si fata de alte elemente contructive;
infasurarile de tip colivie se realizeaza uzual din aluminiu sau cupru
prin turnare sub presiune sau prin sudare;
-Arborele pe care se fixeaza miezul magnetic rotoric, realizat din otel;
-Lagarele utilizate pentru sustinerea rotorului; acestea pot fi cu
frecare de rostogolire (rulmenti) sau cu frecare de alunecare; exista si
lagare magnetice destinate aplicatiilor speciale;
-Inele colectoare ce permit conexiunea infasurarii rotorice (rotor
bobinat) la o sursa de alimentare, la un reostat de pornire sau de
reglaj; acestea se monteaza concentric pe arbore la unul din capetele
acestuia si se realizeaza din cupru sau aliaje.
-Ventilatoare ce permit evacuarea caldurii ca urmare a pierderilor
Joule sau a pierderilor in fier.
-Cuplaje si roti pentru curele ce permit transmisia miscarii de la sau
catre alt echipament; cuplajele pot fi rigide, elastice sau semielastice.
31
1.4.1.3. Rotorul masinilor sincrone include:
-Miezul magnetic rotoric realizat din otel masiv sau lamelat;
-Infasurarile rotorice de curent continuu de tip concentrat
construite din conductor de cupru izolat (rotund sau profilat);
bobinele infasurarilor sunt izolate intre ele si izolate fata de miez
si fata de alte elemente contructive;
-Arborele (vezi 1.4.1.2.);
-Lagarele (vezi 1.4.1.2.);
-Inele colectoare ce permit conexiunea infasurarii rotorice (rotor
bobinat) la sursa de alimentare; acestea se monteaza concentric
pe arbore la unul din capetele acestuia si se realizeaza din cupru
sau aliaje ale sale.
-Ventilatoare (vezi 1.4.1.2.);
-Cuplaje si roti pentru curele (vezi 1.4.1.2.);

32
Dpdv. al participarii la procesul de conversie energetica partile
principale ale unei masini electrice sunt:
- Partea activa: circuitul feromagnetic si circuitele electrice,
- Partea auxiliara: formata din elementele mecanice de consolidare
sau fixare ale partii active: carcasa, scuturi, arbore, lagare, sistem
de consolidare a infasurarilor, elemente de ventilatie si racire,
elemente de fixare, etc.
• Proiectarea unei masini electrice presupune in primul rand
dimensionarea partii active a masinii si ulterior a partii auxiliare
[2].
Coeficientul de constructie: KG = M/Ma
- Ma = Mfe + Mcu este masa partilor active alcatuita din masa
miezului feromagnetic Mfe si din masa conductoarelor Mcu
- M este masa totala a masinii.
O masina economica este caracterizata de un coeficient KG cat
mai aproape de unitate.
33
Proiectarea unei masini electrice are ca prim scop determinarea
dimensiunilor sale geometrice [2].
Dimensiunile geometrice principale ale masinilor electrice sunt:
-Diametrul interior al miezului feromagnetic statoric – D;
-Diametrul exterior al miezului feromagnetic statoric – De;
-Diametrul interior al miezului feromagnetic rotor – Dir;
-Intrefierul masinii (grosimea intrefierului) – d;
-Z1,2 numarul de crestaturi ale statorului 1, respectiv rotorului 2;
-Inaltimea hc, respectiv latimea bc a crestaturilor stator si rotor;
-Lungimea geometrica a miezului feromagnetic – Lg ;
-Lungimea unui pachet de tole al miezului feromagnetic – L1;
-Numarul nv respectiv latimea bv a canalelor radiale de ventilatie in
cazul miezurilor feromagnetice divizate;
-Latimea bm, respectiv inaltimea hm a corpului polului principal al
inductorului (poli aparenti);
-Latimea bp, respectiv inaltimea hp piesei polare a polului principal.
1.4.2. Dimensiuni geometrice principale si ideale
1.4.2.1. Dimensiunile geometrice principale
ale masinilor electrice

34
Dimensiunile ideale sau de calcul ale unei masini electrice sunt
dimensiunile unei masini echivalente dpdv al solicitarilor si
fenomenelor care au loc in masina reala dar care este
caracterizata de camp magnetic uniform in intrefier.
Diametrul masinii D este definit ca fiind diametrul interior al
miezului feromagnetic statoric. Pasul polar al masinii se defineste
ca fiind lungimea arcului de cerc de diametru D corespunzator
unui pol, si are expresia:
t = pD/(2p)
Lungimea ideala Li a masinii este lungimea axiala a miezului
feromagnetic al unei masini echivalente, care ar avea campul
magnetic in intrefier constant pe toata lungimea generatoarei si
egal cu valoarea maxima a campului din intrefierul masinii reale si
fluxul magnetic util pe unitatea de lungime a arcului polar egal cu
fluxul magnetic util din masina reala [2].
1.4.2.2. Dimensiunile ideale ale masinilor electrice
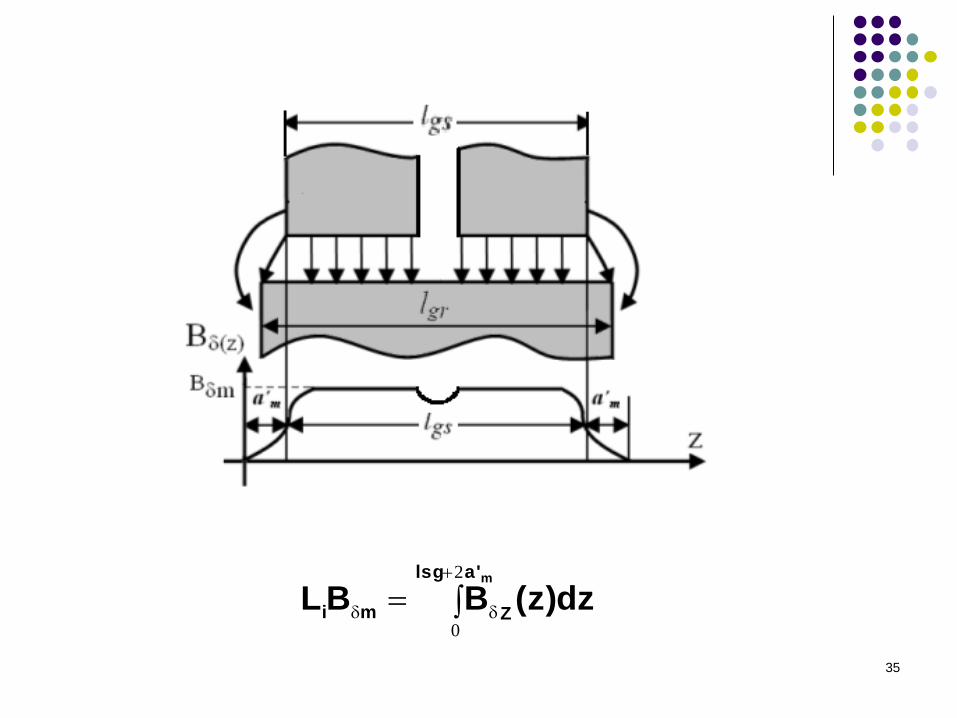
35
dd
m'alsg
Zmi dz)z(BBL2
0
36
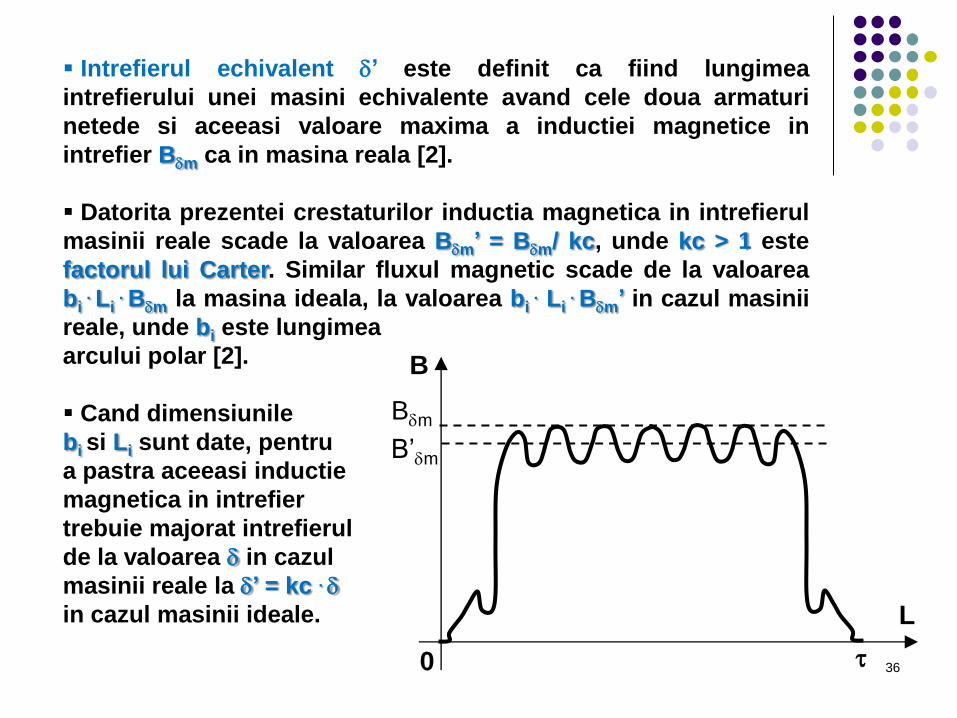
Intrefierul echivalent d’ este definit ca fiind lungimea
intrefierului unei masini echivalente avand cele doua armaturi
netede si aceeasi valoare maxima a inductiei magnetice in
intrefier Bdm ca in masina reala [2].
Datorita prezentei crestaturilor inductia magnetica in intrefierul
masinii reale scade la valoarea Bdm’ = Bdm/ kc, unde kc > 1 este
factorul lui Carter. Similar fluxul magnetic scade de la valoarea
bi . Li
. Bdm la masina ideala, la valoarea bi . Li
. Bdm’ in cazul masinii
reale, unde bi este lungimea
arcului polar [2].
Cand dimensiunile
bi si Li sunt date, pentru
a pastra aceeasi inductie
magnetica in intrefier
trebuie majorat intrefierul
de la valoarea d in cazul
masinii reale la d’ = kc . d
in cazul masinii ideale.
Bdm
B’dm
B
t
L
0

37
1.5.1. Circuite electrice. Circuitele electrice sunt reprezentate
in principal de infasurarile masinii, dar si de alte elemente
conductoare : conexiunile, contactele alunecatoare inel-perie, etc.
1.5.1.1. Clasificarea infasurarilor se face functie de anumite criterii.
In functie de curentul care le parcurge distingem:
-Infasurari parcurse de c.a. (infasurarile masinii asincrone);
-Infasurari parcurse de c.c. (inf. de excitatie la masina sincrona).
In functie de armatura pe care sunt dispuse distingem:
-infasurari statorice,
-infasurari rotorice.
In functie de structura de amplasare a infasurarile sunt:
-cu bobine concentrate (inf. de excitatie la masina sincrona),
-cu bobine repartizate in crestaturi (inf. statorica la mas. asincrona),
-infasurare in colivie.
In functie de numarul de straturi distingem:
-Infasurari in simplu strat;
-Infasurari in dublu strat, Etc.
1.5. Circuite electrice si magnetice. infasurari, miezuri
magnetice, magneti permanenti

38
1.5.2. Circuite magnetice
O componenta de baza a circuitului magnetic al unei masini
electrice sunt miezurile magnetice.
Miezurile feromagnetice sunt de doua tipuri:
-Miezuri parcurse de flux magnetic constant in timp,
-Miezuri parcurse de flux magnetic variabil in timp.
1.5.2.1. Miezuri parcurse de flux magnetic constant in timp -miezul rotoric la masinile sincrone (poli aparenti sau inecati) se
realizeaza din otel masiv turnat, forjat sau laminat.
1.5.2.2. Miezuri parcurse de flux magnetic variabil in timp -miezurile statoric si rotoric la masinile asincrone
-miezul statoric la masinile sincrone.
Aceste miezuri se realizeaza de regula din tole de otel
electrotehnic izolate cu lacuri sau oxizi, de grosime 0.5 mm,
stantate spre intrefier.

39
Miezuri rotorice/statorice

40
1.5.2.3. Magneti permanenti
Magnetii permanenti sunt folositi ca sursa a campului magnetic
de excitatie si sunt intalniti uzual la masinile sincrone de puteri
mici si medii.
Magnetii permanenti sunt realizati din materiale magnetic dure,
cele mai utilizate fiind cele pe baza de pamanturi rare precum
SmCo si NdFeB.

41
Proprietatile magnetilor permanenti
-Inductia remanenta (Br), masura a intensitatii campului magnetic
produs de magnet;
-Campul magnetic coercitiv (Hc), ce semnifica rezistenta
materialului la demagnetizare;
-Densitatea de energie magnetica (BHmax) stocata in magnet;
-Temperatura Curie (Tc), la care materialul devine nemagnetic.
Wm
Wmax = 0.25.Br2/m
pentru BP = 0.5.Br
42
Tipuri de magneti permanenti
Feritele sunt materiale magnetice ceramice, derivate ale oxizilor
de fier (Fe2O3) sau (Fe3O4) sau ale oxizilor altor metale fiind utilizate
pe larg la constructia magnetilor permanenti si a miezurilor
magnetice cu aplicatie in multe domenii ale tehnicii.
AlNiCo - acronim pentru aliaje pe baza de aluminiu (Al), nichel (Ni)
si cobalt (Co). Aliajul mai contine fier, cupru si uneori titan. Energia
magnetica si inductia remanenta sunt superioare magnetilor din
ferite.
Magnetii realizati din pamanturi rare sunt magneti permanenti de
inalta energie realizati din aliaje ale unor elemente rare.
Dezvoltati in anii 1970 – 1980 acesti magneti sunt caracterizati de
o energia magnetica mult superioara magnetilor de tip ferita sau
alnico. Inductia magnetica remanenta poate ajunge la 1.4 T, fata de
doar circa 0.5 T in cazul magnetilor din ferite sau de tip alnico.
Exista doua tipuri de magneti permanenti realizati din pamanturi
rare si anume: magneti de tip SmCo si magneti de tip NdFeB.

43
Proprietatile magnetilor permanenti
Magnet Br (T) Hci (kA/m) (BH)max (kJ/m3) Tc ( C)
Nd2Fe
14B 1.0–1.4 750–2000 200–440 310–400
SmCo5 0.8–1.1 600–2000 120–200 720
AlNiCo 0.6–1.4 275 10–88 700–860
Ferite 0.2–0.4 100–300 10–40 450
http://en.wikipedia.org/wiki/Neodymium_magnet

44
1.6.1. Solicitari electrice
Principalele solicitari electrice sunt reprezentate de patura de
curent (panza de curent) notata cu A si de densitatile de curent
din conductoarele infasurarilor masinii notate cu J [2].
1.6.1.1. Patura de curent A reprezinta o densitate liniara de curent
la nivelul circumferintei indusului la masinile rotative si se
exprima in [A/m] sau [A/cm] prin relatia:
A = It /(pD) = NI /(pD)
unde N este numarul total de conductoare de la periferia rotorului
strabatute de acelasi curent I.
Valoarea paturii de curent A influenteaza dimensiunile masinii si
nivelul sau de incalzire.
1.6. Solicitari electromagnetice si tipuri de pierderi

45
1.6.1.2. Densitatile de curent J in conductoarele infasurarilor
exprimata in [A/mm2] reflecta gradul de solicitare a cailor de
curent, valorile lor influentand volumul materialelor conductoare si
incalzirea acestora.
Stabilirea valorilor densitatilor de curent se face in concordanta
cu valorile paturii de curent.
Incalzirea masinii depinde de fapt de produsul A.J ceea ce
inseamna ca la o valoare mare a lui A se recomanda o valoare mai
redusa a lui J.
Valorile densitatilor de curent se aleg in corelatie cu clasa
termica a infasurarii si cu modul de racire al masinii.
1.6.2. Solicitari magnetice
Principalele solicitari magnetice sunt inductia magnetica in
intrefier (valoare maxima) si inductiile magnetice in diferitele
portiuni ale circuitului magnetic (valori maxime) [2].
46
1.6.2.1. Inductia magnetica in intrefier Bd (amplitudine) exprimata
in [ T ] caracterizeaza gradul de solicitare magnetica a masinii in
intrefier. Pentru anumite dimensiuni date ale masinii o valoare
mare pentru inductia magnetica in intrefier inseamna un flux
magnetic util (ce trece dinspre inductor spre indus) mare si deci o
putere mare a masinii.
Impreuna cu patura de curent inductia magnetica in intrefier
influenteaza direct dimensiunile si caracteristicile masinii.
Tendinta este de a creste valoarea inductiei in intrefier in
anumite limite impuse de performantele tehnico-economice ale
masinii.
Patura de curent si inductia in intrefier se aleg din tabele
intocmite pe baza experientei de fabricatie.
1.6.2.2. Inductiile magnetice Bfe (valori maxime) exprimate in [ T ]
in diferite portiuni ale miezului feromagnetic intocmai ca si
densitatile de curent reflecta gradul de solicitare al miezului
feromagnetic al masinii, de valoarea lor depinzand volumul
miezului feromagnetic si in anumite cazuri incalzirea masinii.
47
1.6.3. Dependenta dintre puterea electromagnetica,
dimensiunile masinii si solicitarile electromagnetice.
Coeficientul de utilizare
Procesul de transformare a energiei ce are loc intr-o masina
electrica este posibil datorita fluxului magnetic util ce inlantuie
infasurarile si curentul total ce parcurge infasurarile [2].
Suportul material al fluxului respectiv curentilor este reprezentat
de miezurile feromagnetice si infasurarile numite materiale active.
1.6.3.1. Dependenta dintre puterea electromagnetica, dimensiunile
masinii si solicitarile electromagnetice. Puterea electromagnetica
a masinii electrice Se obtinuta in urma procesului de transformare
energetica este proportionala atat cu fluxul magnetic total Ft al
masinii cat si cu valoarea curentului total It, factorul de
proportionalitate fiind turatia masinii n exprimata in [rot/s] [2]:
Se ≈ Ft . It
. n [VA]

48
Fluxul magnetic total al masinii se scrie:
Ft = 2 . p . F
unde F este fluxul magnetic util pe pol, in [Wb], iar p este numarul
de perechi de poli.
Curentul total prin infasurari se scrie:
It = p . D . A
unde D este diametrul interior al miezului statorului, iar A este
panza de curent.
Deci puterea electromagnetica se scrie:
Se ≈ (2 . p . F) ( p . D . A) . n [VA]
49
Pentru o masina de curent alternativ:
Se = m . E . I [VA]
unde:
m este nr. de faze,
E este t.e.m. pe faza,
I este curentul pe faza.
T.e.m. pe faza se poate scrie:
E = p . √2 . f . w . kw . Ft
unde:
w este numarul de spire pe faza,
kw este factorul de infasurare.
Panza de curent se scrie:
A = (N.I) / (p.D) = 2.m.w.I / (p.D) ═> I = (p.D.A) / (2.m.w)
50
Daca tinem cont de relatia dintre turatie (in [rot/s]), frecventa si
numar de perechi de poli:
f = p . n
Puterea electromagnetica se scrie:
Se = [(p . kw)/(2 . √2)] . (2 . p . F) . (p . D . A) . n [VA]
Deoarece kw ≈ 0.9 - 0.92 rezulta ca:
(p . kw)/(2 . √2) ≈ 1
Prin urmare:
Se ≈ (2 . p . F) ( p . D . A) . n [VA]
51
La masinile de curent alternativ fluxul magnetic se poate exprima:
F = ai . t . Li
. Bd = ai . (p . D)/(2 . p) . Li
. Bd
Cu t se noteaza pasul polar:
t = (p . D)/(2 . p)
Cu ai se noteaza factorul de acoperire ideala care in ipoteza unei inductii
sinusoidale in intrefier are expresia:
ai = 2/p
Deci puterea electromagnetica se poate scrie:
Se = [ai
. (p . kw)/(2 . √2)] . p2 . D2 . Li. A . Bd
. n = ki . D2 . Li
. A . Bd . n [VA]
Concluzie: puterea electromagnetica Se este proportionala cu:
-volumul materialelor active (D2 . Li),
-cu produsul solicitarilor electromagnetice principale (A . Bd) si
-cu turatia n [rot/s].
52
Volumul materialelor active se poate scrie:
D2 . Li = ki . Se/(n . A . Bd) [m3]
unde ki = ai . p3 . kw/(2 . √2)
Concluzii:
-Pentru o putere electromagnetica data Se si o turatie data n volumul
de material activ D2 . Li este cu atat mai mic cu cat solicitarile
electromagnetice A . Bd sunt mai mari.
-Un volum de material activ D2 . Li dat poate conduce la o masina cu
diametru mare D si lungime mica Li sau un diametru mic D si
lungime mare Li.

53
1.6.3.2. Factorul de forma reprezinta raportul dintre lungimea Li a
masinii si pasul polar t:
l = Li / t
Valoare mica a lui l => masina “tip saiba”;
Caracteristici : moment de inertie mare, cuplu mare, utilizare
neeconomica a conductoarelor de bobinaj (bobinele au lungime
frontala mare si lungime activa mica), constructie voluminoasa.
Valoare mica
a lui l
Valoare medie
a lui l
Valoare mare
a lui l
Valoare mare a lui l => masina “tip turbo”;
Caracteristici : utilizare economica a conductoarelor de bobinaj,
constructie supla, cuplu mai redus pe unitatea de volum.
54
1.6.3.3. Coeficientul de utilizare a masinilor electrice se defineste
prin relatia:
C = Se / (D2 . Li
. n) [J/dm3]
Coeficientul de utilizare reprezinta puterea electromagnetica
obtinuta pe unitatea de volum a materialelor active si pe unitatea
de turatie.
C = Se / (D2 . Li
. n) = ki . p2 . A . Bd
unde ki este un coeficient numeric dependent de kw.
55
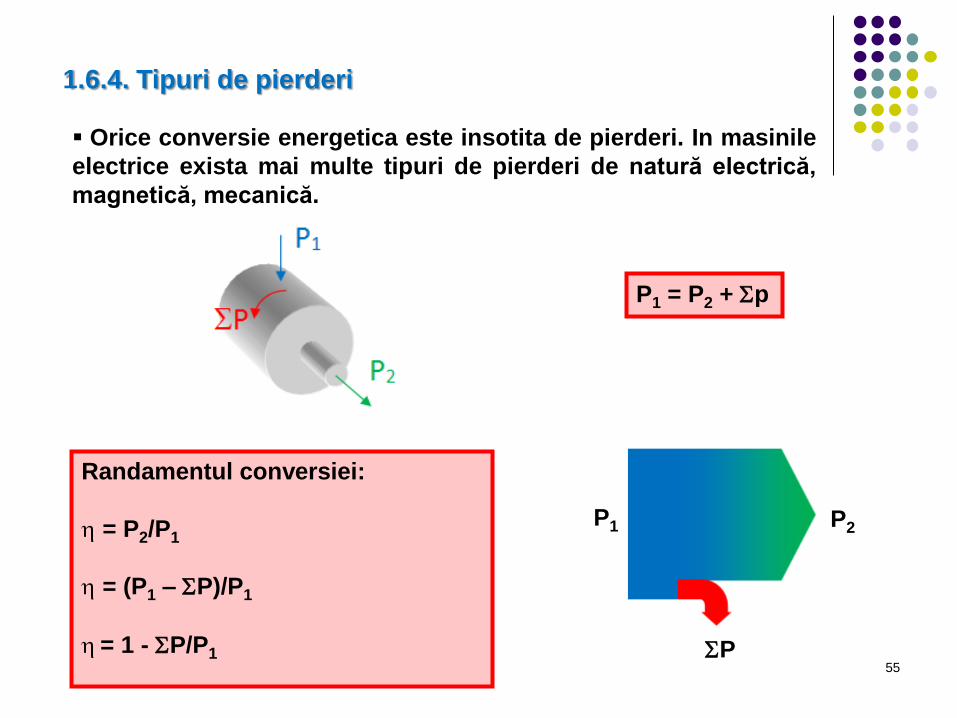
1.6.4. Tipuri de pierderi Orice conversie energetica este insotita de pierderi. In masinile
electrice exista mai multe tipuri de pierderi de natură electrică,
magnetică, mecanică.
Randamentul conversiei:
= P2/P1
= (P1 – SP)/P1
= 1 - SP/P1
P1 = P2 + Sp
P1 P2
SP
56
Principalele tipuri de pierderi in masinile electrice sunt:
-pierderile Joule in infasurari,
-pierderile in fier,
-pierderile mecanice prin frecare si ventilatie, respectiv
-pierderile suplimentare.
1.6.4.1. Pierderile Joule in infasurari apar ca urmare a trecerii
curentului electric prin infasurarile masinii. Pierderile Joule se
calculeaza cu relatia Pj = RI2, unde R reprezinta rezistenta
infasurarii iar I reprezinta valoarea efectiva a curentului ce
parcurge infasurarea.
1.6.4.2. Pierderile in fier sunt pierderile ce apar in miezurile
feromagnetice parcurse de flux magnetic variabil in timp. Aceste
pierderi sunt de doua tipuri si anume pierderi prin curenti Foucault
sau turbionari si pierderi prin histerezis magnetic. Aceste pierderi
se pot exprima prin relatia:
Pfe = PF + Ph

57
Pierderile prin curenti Foucault intr-un miez de masa M se pot scrie
ca fiind:
PF = sF . M . B2 . f2
Pierderile prin histerezis intr-un miez de masa M se pot scrie ca
fiind:
Ph = sh . M . Bn . f
Unde B este valoarea maxima a inductiei magnetice, n este o
putere cuprinsa in intervalul 1.6 – 2, sF si sh sunt constante de
material.
In practica se folosesc relatii care sa conduca direct la valoarea
globala a ambelor feluri de pierderi. In general fabricantii de tole
pun la dispozitie pierderile specifice in fier exprimate in [W/kg] la
frecventa de 50 Hz si inductie de 1 T.
Pentru calculul pierderilor la alta frecventa de lucru fL si alta
inductie magnetica de lucru BLse aplica relatia de calcul globala:
Pfe = Pfe 1/50 . (fL/50)1.3 . BL
2

58
1.6.4.3. Pierderile mecanice prin frecare si ventilatie se pot scrie
ca fiind:
Pm = Pfv + Ppe
Unde Pfv reprezinta pierderile prin frecare in lagare si de ventilatie
prin miscarea rotorului, iar Ppe pierderile la nivelul periilor (acolo
unde exista).
1.6.4.4. Pierderile suplimentare reprezinta pierderile datorate
refularii curentului in conductoarele infasurarilor, pierderile
suplimentare in fier datorita armonicilor de dantura etc.
Pentru masinile de c.a. asincrone si sincrone pierderile
suplimentare se estimeaza cu relatia:
Ps = 0.005 . Pn [W],
unde Pn este puterea nominala a masinii exprimata in [W].

59
1.7.1. Standardizarea
Prin standardizare se intelege reglementarea tehnica, unitara,
organizata, care stabileste norme si prescriptii privitoare la
caracteristicile (calitate, dimensiuni, forma, materiale, gama de
tipuri si alte elemente) ce definesc produsele, precum si privitoare
la alte aspcte precum: metode de analiza si incercari, notiuni
stiintifice, unitati de masura, terminologie, clasificare, simbolizare,
marcare, proiectare, executie etc.
-Standardizarea este o activitate specifica ce stabileste, pentru
probleme reale sau potentiale, dispozitii destinate unor utilizari
comune sau repetate, furnizand reguli si indrumari avand ca scop
obtinerea unui grad optim de ordine intr-un context dat.
-Standardizarea se refera deci, la un ansamblu de masuri
specifice, rezultate din elaborarea si aplicarea unui sistem de
norme si prescriptii cuprinse in standardele nationale si
internationale.
1.7. Elemente de standardizare si tipizare

60
-Obiectul principal al standardizarii il constituie activitatea de
elaborare a unor documente numite standarde, specifice unui
anumit domeniu de activitate, pentru un anumit tip de serviciu,
produs, material etc., prin specificare, tipizare, normalizare si
unificare in scopul imbunatatirii calitatii produselor, cat si pentru
reglementarea relatiilor dintre producator si beneficiar.
-Standardul este un document stabilit prin consens si aprobat de
un organism recunoscut care prevede pentru utilizari comune si
repetate, reguli, prescriptii si caracteristici referitoare la diferite
activitati sau rezultatele acestora.
-Lucrarile de standardizare nationala, internationala si europeana
se realizeaza in comitete tehnice, care sunt organisme create pe
domenii de activitate.
-In Romania, organul suprem de specialitate al administratiei
publice centrale in domeniul standardizarii este Asociatia de
Standardizare din Romania (ASRO).
61
-Romania face parte din Organizatia Internationala de
Standardizare (ISO), Comisia Electrotehnica Internationala (CEI
sau IEC), etc. si este membru afiliat al Comitetului European de
Standardizare (CEN), al Comitetului European de Standardizare
Electrotehnica (CENELEC), etc.
1.7.1.1. Simbolizari ale standardelor
-STAS inseamna STAndard de Stat, iar SR inseamna Standard
Roman;
-SR EN inseamna standard roman identic cu standard european
(Euro Norm - EN).
-SR CEI (IEC) inseamna standard roman identic cu standard
international elaborat de CEI,
-SR ISO inseamna standard roman identic cu standard
international elaborat de ISO.

62
1.7.1.2. Clasificarea ICS a standardelor. Exista trei nivele de
clasificare a standardelor:
Nivelul 1, cuprinde 40 de domenii ale activitatii de standardizare.
Exemplu: 29 Electrotehnica
Nivelul 2, in care domeniile sunt divizate in 389 grupe.
Exemplu: 29.160 Masini electrice rotative
Nivelul 3, in care o parte a grupelor sunt impartite in subgrupe.
Notarea unei subgrupe se face prin simbolul grupei urmat de un
punct si un grup de doua cifre.
Exemple: 29.160.30 Motoare electrice.
29.160.20 Generatoare.

63
1.7.2. Tipizare in domeniul masinilor electrice
Eforturi importante s-au depus in ultimii ani pentru obtinerea
unor serii unitare de masini electrice.
O serie unitara este formata dintr-un numar de masini cu
destinatie si cu constructie determinate, ale caror puteri cresc
cu o ratie constanta pentru anumite trepte de turatii si de
tensiuni, intr-o gama limitata.
Masinile componente ale unei serii unitare sunt asemenea
sub aspect arhitectural, cu elemente interschimbabile si cu
solicitari electromagnetice fara cresteri in salturi. Elementele
din cadrul unei serii particularizate ca putere si turatie, se
numesc tipodimensiuni.

64
Seriile unitare de motoare asincrone au fost in general
dezvoltate de catre marile intreprinderi de specialitate din tarile
dezvoltate, iar ulterior s-au standardizat.
In Romania se produc diferite serii de motoare asincrone de
uz general sau specializate, in unele cazuri existand, pe
portiuni de serii, paralelisme in sensul ca motoare de aceeasi
putere si turatie se produc in uzine diferite, in conceptii
constructive diferite, cu tehnologii si performante diferite.
Si in domeniul masinilor sincrone s-au depus eforturi
importante privind dezvoltarea unor serii unitare (ex. in cadrul
colectivului ICPE - ME).
In cazul seriilor unificate de masini electrice tipizarea si
unificarea reperelor (in special a celor stantate, pentru care
SDV-urile sunt costisitoare), precum si corelarea putere –
dimensiuni, obligatorii pentru o productie de masa in conditii
de economicitate, obliga la solutii de compromis cu o anumita
indepartare fata de solutiile optime rezultate din calcule tehnice
cu impunerea unui criteriu acceptat.

65
Principalele dimensiuni de gabarit si de montaj ale
masinilor asincrone de uz general (UMEB)
1.7.3. Dimensiuni principale ale masinilor electrice
Sursa: www.umeb.ro
66
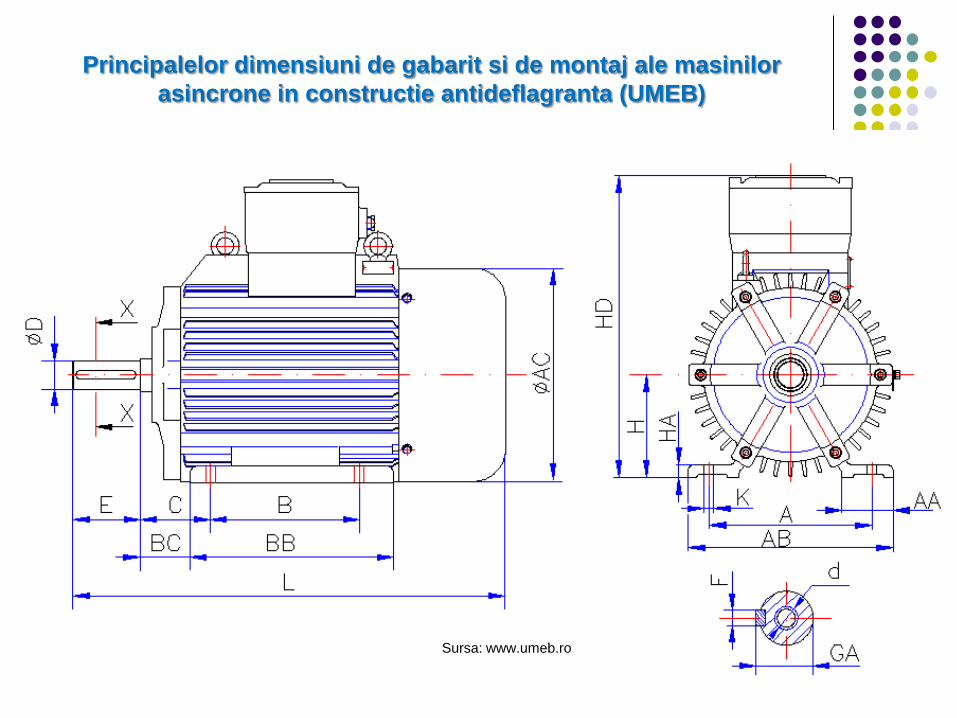
Principalelor dimensiuni de gabarit si de montaj ale masinilor
asincrone in constructie antideflagranta (UMEB)
Sursa: www.umeb.ro
67
2. METODE DE DIMENSIONARE SI OPTIMIZARE A
MASINILOR ELECTRICE
2.1. Introducere
Dimensionarea masinilor electrice face apel la metodologii specifice
de proiectare care pot avea la baza:
- Modele analitice plecand de la unele relatii stabilite, de la teoria
masinii sau de la observatii empirico-experimentale,
- Modele numerice pentru determinarea unor marimi sau parametri de
interes pentru masina,
- Combinatie modele analitice/ modele numerice.

68
Modele analitice utilizate in proiectare. Aceste modele utilizate
pe scara larga in trecut utilizeaza formule simple de calcul analitic,
valabile in anumite ipoteze simplificatoare, imbinate cu experienta
practica. Modelele de calcul sunt usor de rulat, dar uneori
imprecise, necesitand multe prototipuri realizate.
Modele numerice. Prin dezvoltarea tehnicii de calcul se creeaza
premisele aparitiei de pachete de programe profesionale de calcul
de camp 2D/3D cu nivel ridicat de generalitate si precizie, capabile
sa ia in considerare aspecte complexe precum neliniaritati
magnetice, armonici de dantura, cuplaje camp-circuit-miscare-
comanda etc.
Creste precizia de calcul permitand reducerea numarului de
prototipuri premergator lansarii in fabricatie.
Permit tratarea unor fenomene tot mai complexe insa cu pretul
unor eforturi de calcul tot mai importante.
69
Combinatia modele analitice/modele numerice. Combinarea
formulelor analitice clasice cu modelele de calcul de camp 2D/3D
permit in multe cazuri reducerea drastica a timpului de calcul si
analiza fara a sacrifica prea mult in ceea ce priveste precizia de
calcul.
Aceste modele sunt utilizate deseori pentru studii de optimizare
complexe care necesita rulari numeroase si eforturi de calcul
importante.
Provocarile actuale in proiectarea masinilor electrice sunt :
-Luarea in calcul a functionarii sistemului in ansamblu si nu doar a
componentei proiectate (masina + actionare electrica);
-Calcule de dimensionare si optimizare pentru un numar important
de puncte de functionare (de ex. masini pt. sisteme de actionare
cu turatie variabila);
-Complexitatea fenomenelor de tip multifizica ce trebuiesc luate in
calcule (electromagnetism – termodinamica – hidrodinamica –
deformare etc. );
-Explorarea intregului spatiu de solutii posibile si identificarea
solutiei optime utilizand algoritmi de optimizare numerica;
-Etc.
70
2.1.1. Proiectarea optimala
Justificarea proiectarii optimale:
1. Un prototip este deseori dificil si scump de proiectat si
executat;
2. Daca prototipul nu este satisfacator dureaza si costa mult
proiectarea si construirea altuia.
Proiectarea optimala permite o economie de timp si o reducere a
costurilor prin:
1. Utilizarea de modele de calcul analitice/numerice performante,
cu nivel de acuratete ridicat;
2. Pilotarea modelelor de calcul cu ajutorul algoritmilor de
optimizare ce permit indentificarea solutiei optime;
3. Solutia optima aflata reprezinta baza pentru prototipul ce
urmeaza a fi executat.

71
2.1.2. Probleme de analiza si de sinteza in domeniul
masinilor electrice
A. Problema de analiza: determinarea performantelor unei masini
date
B. Problema de sinteza (inversa problemei de analiza):
proiectarea masinii la performante impuse
Proiectarea masinilor electrice la performante impuse este o
problema de sinteza (problema inversa)
Mașina electrică
Performanțe
Analiză
Sinteză

72
A. Etapele unei probleme de analiza:
1. Analiza si prelucrarea datelor nominale (inscrise pe placuta
indicatoare) si a altor date de catalog ale masinii studiate;
2. Analiza principalelor elemente constructive (dimensiuni
geometrice, materiale, proprietati fizice, etc);
3. Determinarea prin calcule a performantelor tehnice si
economice (caracteristici de functionare, costuri de fabricatie,
costuri de exploatare, etc.) pe baza unor modele adecvate ale
maşinii.
O problema de analiza poate fi solutionata !

73
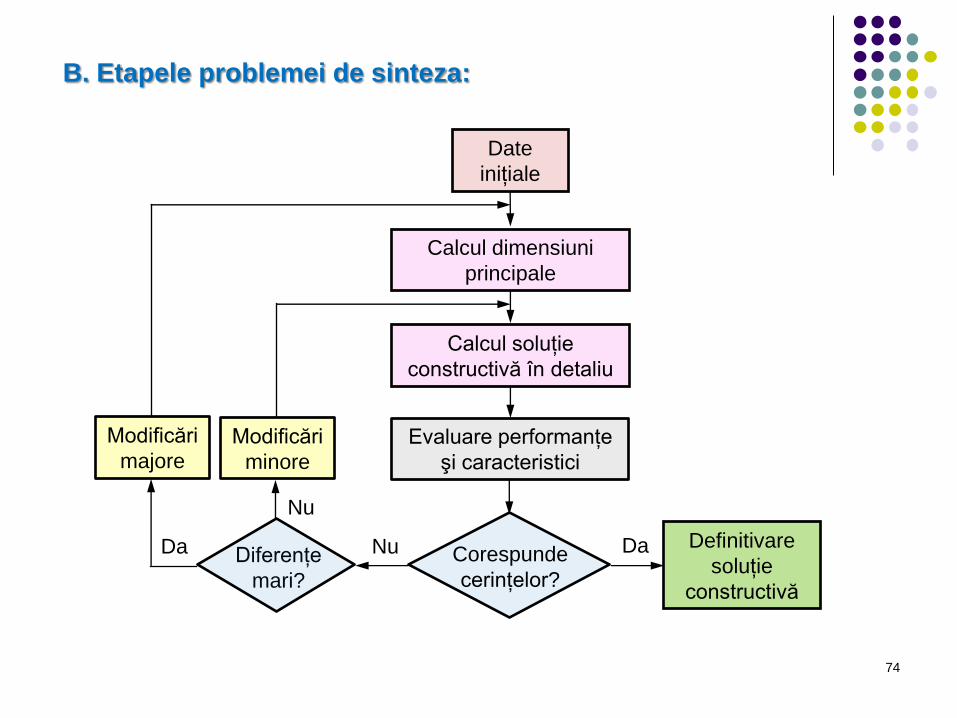
B. Etapele unei probleme de sinteza:
1. Formularea temei de proiectare (datelor initiale), stabilirea
tipului constructiv, a materialelor, a sistemului de racire etc. pe
baza cerintelor beneficiarului;
2. Calculul dimensiunilor principale ale maşinii şi evaluarea
solicitărilor electromagnetice corespunzătoare unui anumit
criteriu de optimizare (greutate minimă, cost minim, randament
maxim, etc.) utilizând o metodologie de dimensionare având la
bază modele analitice-numerice ale maşinii şi experienţa de
fabricaţie;
3. Dimensionarea în detaliu a elementelor componente ale
sistemului electromagnetic şi ale structurii mecanice,
corespunzătoare soluţiei optime;
4. Calculul performanţelor tehnice şi economice ale maşinii, prin
calcul analitic sau/şi numeric şi compararea lor cu cele impuse în
tema de proiectare;
5. Corectarea soluţiei constructive obţinută în etapa de
dimensionare detaliată (dacă e cazul) până se asigură
performanţele impuse.
O problema de sinteza nu are intotdeauna solutie !
74
B. Etapele problemei de sinteza:
Date
iniţiale
Calcul dimensiuni
principale
Corespunde
cerinţelor?
Da Definitivare
soluţie
constructivă
Nu Diferenţe
mari?
Nu
Modificări
minore
Modificări
majore
Da
Calcul soluţie
constructivă în detaliu
Evaluare performanţe
şi caracteristici
75
Metodele analitice de dimensionare a masinilor electrice
utilizeaza relatii de calcul definite pe baza teoriei circuitelor
electrice, a campului electromagnetic, a mecanicii etc. ce sunt
completate cu formule si coeficienti cu valori tabelate rezultate din
experienta de proiectare/productie.
2.2.1. Etapele principale ale dimensionarii analitice a masinilor el.
-Formularea temei de proiectare, stabilirea datelor nominale si a
altor date functionale si constructive,
-Determinarea marimilor de calcul,
-Calculul dimensiunilor principale,
-Determinarea lungimii intrefierului,
-Calculul infasurarilor statorice si rotorice,
-Calculul circuitului magnetic si a curentului de magnetizare,
-Determinarea parametrilor infasurarilor,
-Calculul pierderilor si a randamentului,
-Determinarea caracteristicilor masinii,
-Calculul elementelor auxiliare.
2.2. Metode analitice de dimensionare a masinilor electrice

76
Metodele analitice de dimensionare contin si etape particulare (pe
langa cele evocate) de calcul a unor elemente ce tin de specificul masinii analizate.
Relatiile de calcul utilizate sunt particulare in functie de masina
analizata.
2.3. Metode numerice utilizate in proiectarea a masinilor
electrice
Metodele numerice de calcul de camp utilizate mai frecvent in
proiectarea masinilor electrice sunt:
-Metoda Elementelor Finite (MEF),
-Metoda Diferentelor Finite (MDF),
-Etc.
Metodele numerice pot fi utilizate in mod direct in probleme de
analiza. Pentru utilizarea lor in probleme de sinteza (ex. de proiectare
la performante impuse) sunt necesare mai multe iteratii.

77
2.3.1. Etape principale in analiza si proiectarea masinilor
electrice utilizand MEF
-Descrierea geometriei domeniului de calcul 2D/3D;
-Definirea retelei de discretizare tinand cont de aspectele fizice
ale problemei;
-Definirea regimului de camp caracteristic studiului efectuat
(regim magnetostatic, magnetic stationar, magnetodinamic,
magnetic tranzitoriu etc.);
-Definirea proprietatilor de material care intervin in problema de
analiza numerica;
-Definirea regiunilor domeniului de calcul si a surselor de camp
(densitati de curent, curent etc.);
-Definirea circuitului electrice asociat daca e cazul;
-Asocierea proprietatilor de material si a componentelor de
circuit (unde e cazul) regiunilor domeniului de calcul;
-Definirea conditiilor la limita (initiale si pe frontiere);
-Asamblarea matricelor si rezolvarea sistemului de ecuatii
algebrice;
-Analiza rezultatelor numerice (calculul marimilor locale si
integrale necesare).
78
2.3.1.1. Avantaje ale MEF
- Permite tratarea domeniilor neomogene si neliniare;
- Conduce la un algoritm relativ usor de implementat in special in
cazul elementelor de ordin inferior;
- Are grad sporit de generalitate, existenta diverselor tipuri de
elemente finite permitand abordarea probleme cu geometrii
complexe;
- Reteaua de discretizare poate fi indesita local;
- Elementele finite nodale conduc deseori la matrici rare cu
structura banda permitand folosirea metodelor de calcul iterative
performante;
- Se poate cupla cu MEFr;
- In cazul problemelor de regim tranzitoriu derivatele in timp pot fi
tratate prin MDF;
- Post-procesarea marimilor de camp este usor de realizat.
2.3.1.2. Dezavantaje ale MEF
- Modelarea problemelor cu frontiere deschise necesita extinderea
domeniului de calcul pentru a obtine o precizie adecvata;
- Dificultati la modelarea mediilor in miscare, in unele cazuri
implicand refacerea retelei de discretizare si distorsionarea
acesteia.

79
2.3.2. Etape principale in analiza numerica utilizand MDF
-Descrierea fizica si geometrica a problemei de studiat (definirea
ecuatiei diferentiale ce descrie fenomenul studiat si stabilirea
domeniului de calcul);
-Definirea retelei de discretizare aferente domeniului de calcul;
-Definirea regiunilor domeniului de calcul si a surselor de camp
(densitati de curent, curent etc.);
-Asocierea proprietatilor de material regiunilor domeniului de
calcul;
-Definirea conditiilor la limita (initiale si pe frontiere);
-Aproximarea operatorilor diferentiali prin diferente finite;
-Asamblarea matricei si rezolvarea sistemului de ecuatii
algebrice;
-Analiza rezultatelor numerice (calculul marimilor locale si
integrale necesare).

80
2.3.2.1. Avantaje ale MDF
-Algoritm simplu de implementat pe calculator, in special la
diferente finite de ordinul 1;
-Permite tratarea problemelor neliniare;
-Matricea rezultanta este rara, de tip banda (latimea benzii de
maxim 3, 5 respectiv 7 elemente in cazul problemelor 1D, 2D
respectiv 3D) si pozitiv definita in cele mai multe cazuri.
-Permite o combinatie eficienta cu Metoda Elementului Finit la
rezolvarea de probleme de regim tranzitoriu.
2.3.2.2. Dezavantajele ale MDF
-Sistem rigid de discretizare a
domeniului de calcul, acesta restrangand
mult domeniile MDF de aplicabilitate; o
rafinare locala a retelei de discretizare
implica o rafinare dupa toate axele
sistemului de coordonate;
-Impunere dificila a conditiilor pe
frontiere la geometrii complexe;
-Considerarea neomogeneitatilor
conduce la erori la nivelul suprafetei de
separare dintre domeniile omogene;
Frontieră descrisă prin
diferenţe finite
81
Proiectarea optimala a masinilor electrice presupune cunostinte
teoretice specifice privind:
-conversia electromecanica a energiei,
-incalzirea si ventilatia masinii,
insa necesita si cunostinte solide legate de:
-aspectele tehnologice ce intervin (limite tehnologice, alegerea
procedeelor tehnologice optime tinand cont de masinile unelte
existente, materiale disponibile etc.),
-conditiile de utilizare ale masinii (nivel de temperatura, praf,
mediu exploziv, utilizare in sisteme de actionare cu turatie
reglabila, regimuri grele de exploatare, tipul serviciului de
functionare etc.),
-economicitatea constructiei si exploatarii (costuri reduse de
fabricatie si exploatare, randament ridicat etc.).
2.4. Criterii tehnico-economice si constrangeri in
proiectarea optimala masinilor electrice

82
2.4.1. Criterii tehnico-economice de calcul optimal al
masinilor electrice [3]
Minimizarea costurilor materialelor componente (materiale active,
materiale de constructie) in situatia unui nivel de performante
impuse prin egalitati sau inegalitati (ex. η ≥ ηmin,),
Minimizarea costurilor materialelor componente si costurilor cu
manopera de fabricatie,
Minimizarea cheltuielilor totale, de fabricatie si de exploatare, in
prezenta restrictiilor functionale legate de performante.
Minimizarea costurilor de fabricatie si maximizarea factorului de
putere (cheltuieli mai mici cu energia reactiva consumata, eventual
redimensionarea echipamentelor de compensare a energiei
reactive la barele proprii).
Optimizare dpdv. al fabricantului
Optimizare dpdv. al utilizatorului si al economiei nationale
Optimizare dpdv. al fabricantului, al utilizatorului, al
furnizorului si al distribuitorului de energie electrica
83
2.4.2. Constrangeri in proiectarea optimala a masinilor el.
Proiectarea si executia masinilor electrice trebuie sa tina cont de:
-Limitari sau recomandari impuse prin standarde de specialitate
cu referire fie la masina electrica fie la echipamentele antrenate,
-Constrangeri de natura tehnologica,
-Constrangeri economice,
-Etc.
Constrangerile se pot referi la:
-Dimensiunile geometrice ale masinii (dimensiuni de gabarit, etc.);
-Caracteristici de functionare (randament, factor de putere, cuplu
de pornire, cuplu maxim, alunecare critica, curent de pornire etc.);
-Clasa termica (temperatura maxima admisibila, etc.);
-Materiale utilizate (tole, magneti, conductoare de bobinaj,
materiale electroizolante, etc.);
-Tehnologia de fabricatie (masini unelte, procedee tehnologice);
-Conditii specifice de lucru (acestea pot impune de pilda in cazul
mediilor explozive tipul de protectie, temperatura maxima la
exteriorul carcasei etc.)
-Aspecte tehnico-economice (fiabilitate, costuri reduse pe unitate
ceea ce implica tehnologii si materiale cat mai ieftine, etc.);
-Etc.
84
2.5. Formularea si rezolvarea problemelor de optimizare
si a celor inverse
Proiectarea optimala a masinilor electrice in raport cu anumite
criterii impuse de beneficiar face apel tot mai frecvent la tehnici de
analiza numerica evoluate care au la baza modele de camp pilotate
de algoritmi inteligenti de optimizare numerica.
Algoritmii de optimizare numerica au cunoscut in ultimii ani o
dezvoltare continua si un grad tot mai ridicat de aplicare in
conceptia si optimizarea echipamentelor si proceselor, respectiv in
rezolvarea problemelor inverse.
Interesul crescand manifestat in acest domeniu poate fi usor
remarcat prin numarul important de comunicari stiintifice
prezentate in ultimii ani la conferinte, simpozioane si reuniuni
stiintifice internationale de profil, respectiv prin numarul important
de rapoarte de cercetare si de carti de specialitate dedicate
algoritmilor si problemelor de optimizare.

85
Conceptia asistata de calculator cuplata cu algoritmi de
optimizare eficienti:
-simplifica sarcina inginerului proiectant,
-diminueaza timpul de lucru si costurile de personal.
In particular, proiectarea optimala a masinilor electrice prin
utilizarea algoritmilor de cautare performanti reprezinta un subiect
de mare interes si actualitate pentru mediile academice, industriale
si pentru centrele de cercetare/dezvoltare de profil.
2.5.1. Formularea unei probleme de optimizare
O problema de optimizare consta in cautarea minimului unei
marimi scalare E care depinde de n parametrii, x1, x2, x3, … , xn.
Daca marimea E depinde de acesti parametrii prin intermediul unei
functii f :W , atunci putem defini problema de optimizare dupa
cum urmeaza [4]:
Minimizarea E = f(x1, x2, x3, … , xn) ,
care semnifica faptul ca trebuie gasit setul de variabile
independente (x1, x2, x3, … , xn) = argmin f, care apartin
domeniului de definitie al functiei f, pentru care f ia valoarea cea
mai mica, valoare care la randul sau trebuie deasemenea calculata.

86
Exemple de functii test pentru algoritmi de optimizare
Functie convexa (1 parametru)
f (x) = 2*x2
87
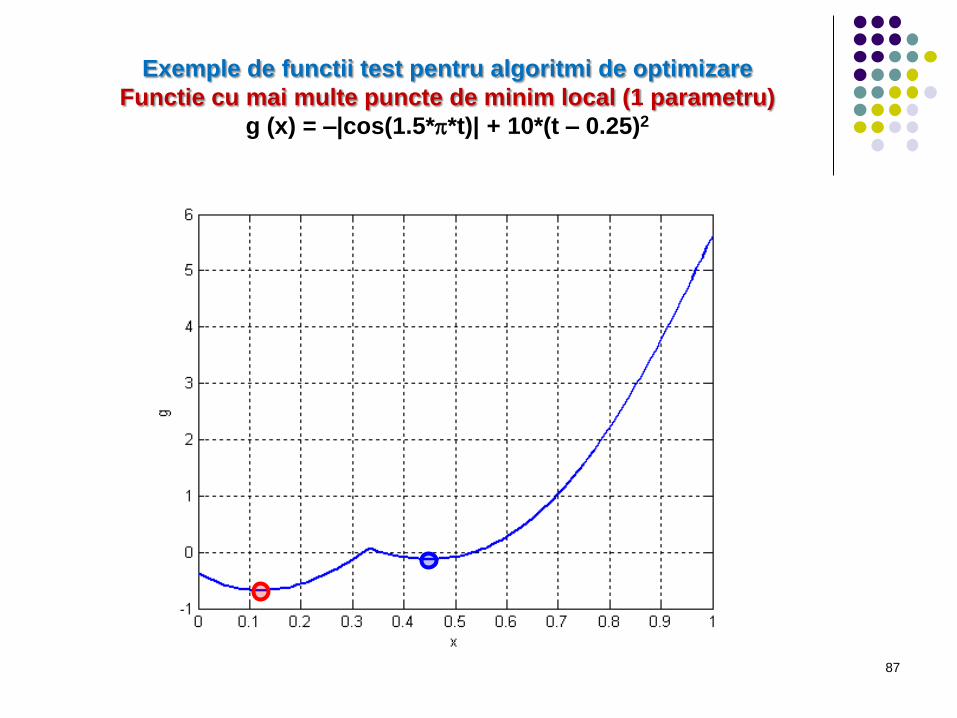
Exemple de functii test pentru algoritmi de optimizare
Functie cu mai multe puncte de minim local (1 parametru)
g (x) = –|cos(1.5*p*t)| + 10*(t – 0.25)2
88
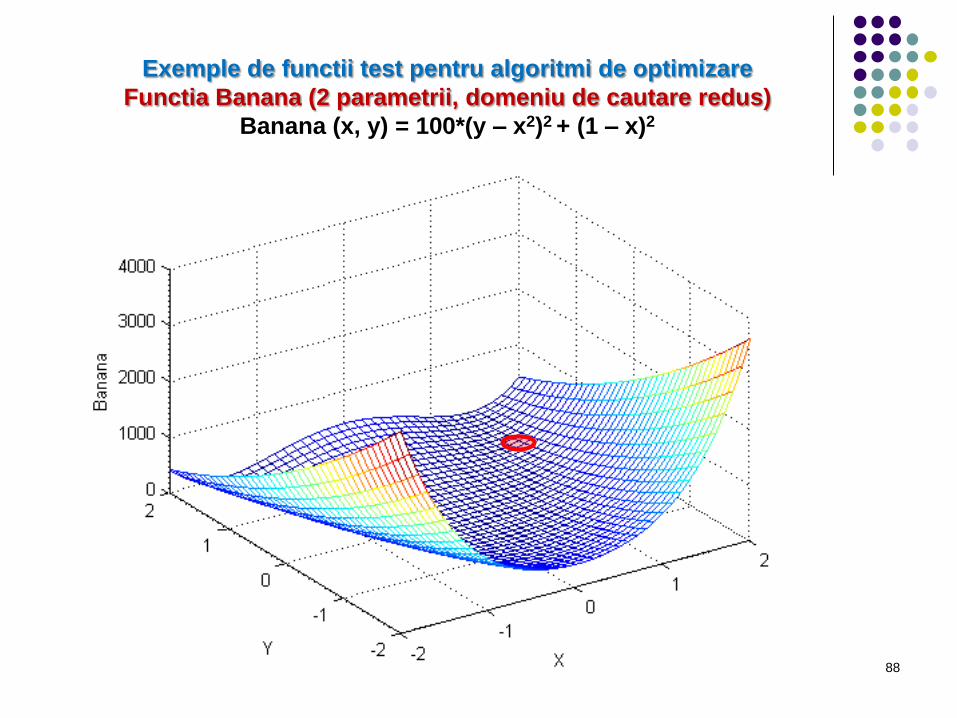
Exemple de functii test pentru algoritmi de optimizare
Functia Banana (2 parametrii, domeniu de cautare redus)
Banana (x, y) = 100*(y – x2)2 + (1 – x)2

89
Exemple de functii test pentru algoritmi de optimizare
Functia Banana (2 parametrii, domeniu de cautare redus)
Banana (x, y) = 100*(y – x2)2 + (1 – x)2
90 -2
-10
12
-2
-1
0
1
2-2
0
2
4
6
8
10
XY
Cam
ila
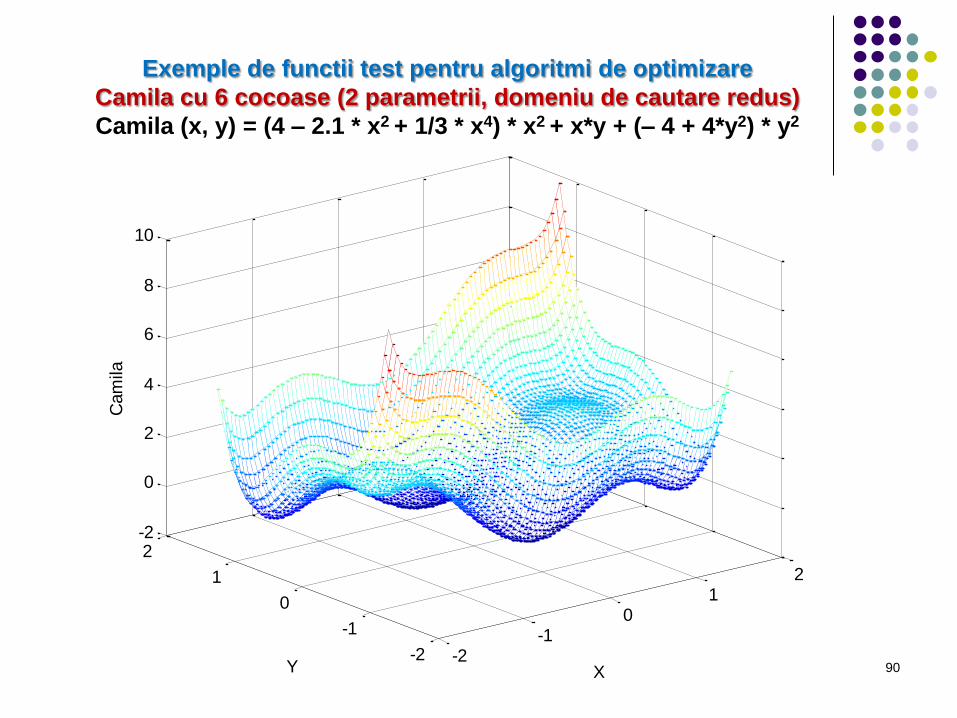
Exemple de functii test pentru algoritmi de optimizare
Camila cu 6 cocoase (2 parametrii, domeniu de cautare redus)
Camila (x, y) = (4 – 2.1 * x2 + 1/3 * x4) * x2 + x*y + (– 4 + 4*y2) * y2

91 X
Y
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2
-1
-0.5
0
0.5
1
Exemple de functii test pentru algoritmi de optimizare
Camila cu 6 cocoase (domeniu de cautare redus)
Camila (x, y) = (4 – 2.1 * x2 + 1/3 * x4) * x2 + x*y + (– 4 + 4*y2)*y2

92
Functia f ce trebuie minimizata se numeste Functie Obiectiv
(FO). Setul de n parametri va fi reprezentat ca un vector coloana
avand componente reale:
X = [x1, x2, x3, … , xn] T n
Vom nota cu Xmin punctul X W, pentru care f ia valoarea cea
mai mica, notata cu: Emin = min {f(X) : X W}.
Daca Emin este valoarea cea mai mica a lui E pentru orice
vector X care apartine domeniului de calcul W, atunci punctul
Xmin se numeste punct de minim global.
Dimpotriva daca acest punct reprezinta un punct de minim doar
intr-un subdomeniu al lui W, acesta se numeste punct de minim
local.
O problema delicata in procesul de optimizare consta in aflarea
punctului de minim global fara a “cadea in cursa”, negasind
decat un simplu punct de minim local.
93
Pentru a compara eficienta diferitilor algoritmi iterativi de
optimizare se au in vedere urmatoarele criterii:
-viteza de convergenta catre punctul de minim,
-nivelul de incredere ca punctul de minim gasit este punctul de
minim global.
Valoarea Ek a functiei obiectiv pe durata procesului iterativ de
cautare este singura marime care reflecta progresul algoritmului
de optimizare.
Daca valoarea Ek a functiei obiectiv la iteratia k nu mai descreste
un anumit numar de iteratii este posibil ca algoritmul sa fi gasit
un punct de minim. Totusi este apriori dificil de spus daca acest
punct este sau nu un punct de minim global.
Viteza de convergenta este de regula estimata prin numarul de
evaluari ale FO f, necesare pentru a reduce valoarea Ek pana la o
anumita valoare impusa.
In ceea ce priveste nivelul de incredere trebuie mentionat faptul
ca daca FO prezinta atat minime locale cat si globale nicio metoda
de optimizare nu garanteaza convergenta spre minimul global.
94
2.5.2. Algoritmi de optimizare
Algoritmii de optimizare numerica se impart in doua mari clase, si
anume algoritmi deterministi si algoritmi stochastici.
2.5.2.1. Algoritmii deterministi conduc la aceeasi solutie pentru
diferite executii ale programului de calcul, daca algoritmul pleaca
din aceleasi conditii initiale si are aceiasi parametri.
Dezavantajul principal al algoritmilor deterministi consta in
faptul ca acestia converg intotdeauna catre un punct de extrem
local care depinde de punctul de plecare si care poate fi diferit de
minimul global. O solutie de compromis pentru a ne asigura ca
algoritmul nu a “cazut” intr-un minim local, consta in repornirea
algoritmului din diferite puncte de plecare uniform distribuite in
domeniul de cautare. Ulterior, valoarea cea mai mica a FO este
considerata ca fiind minimul global al problemei. In practica, o
buna parte dintre problemele de optimizare cu suport fizic nu
prezinta decat un singur punct de minim, care este de fapt
minimul global al FO.
FO al carui punct de minim local este si punct de minim global
se numeste functie unimodala sau convexa.

95
2.5.2.2. Algoritmii stochastici au un caracter aleatoriu si nu
conduc obligatoriu la aceeasi solutie, chiar daca algoritmul
pleaca din aceleasi conditii initiale si are aceiasi parametri.
Algoritmii stochastici reprezinta o alternativa la algoritmii
deterministi si sunt din ce in ce mai utilizati in problemele de
optimizare.
Algoritmii stochastici sunt relativ bine adaptati problemelor cu
mai multe minime, in care trebuie o investigatie detaliata a
domeniului de calcul pentru a identifica punctul de minim global.
Nici aceasta clasa de algoritmi nu garanteaza aflarea punctului de
minim global, insa au o probabilitate mai mare de a-l gasi.
Dezavantajul major al acestor algoritmi consta in numarul foarte
mare de evaluari al FO necesar gasirii punctului de minim global.
Exemple de algoritmi deterministi: Simplex Downhill, Powell,
Metoda Retelei, etc.
Exemple de algoritmi stochastici: Random Search, Genetic
Algorithms, Particle Swarm Optimization, etc.
96
2.5.2.3. Algoritmul Simplex Downhill
ASD este un algoritm determinist de ordin 0, necesitand evaluari
doar ale functiei obiectiv, nu si ale derivatelor sale.
Avantaje ale ASD:
-simplitate
-robustete.
Un simplex este o figura geometrica care in cazul problemelor cu
n parametri este un poliedru cu n+1 varfuri, ce contine toate
interconexiunile de tip segmente intre varfuri, fete poligonale, etc.
Probleme de optimizare cu:
- 2 parametri => simplex = triunghi,
- 3 parametri => simplex = tetraedru etc.
Prezinta interes structurile simplex nedegenerate, care
delimiteaza un volum interior n - dimensional nenul.

97
in cazul problemelor de optimizare n - dimensionale ASD are
nevoie de n+1 puncte de plecare care definesc simplexul initial.
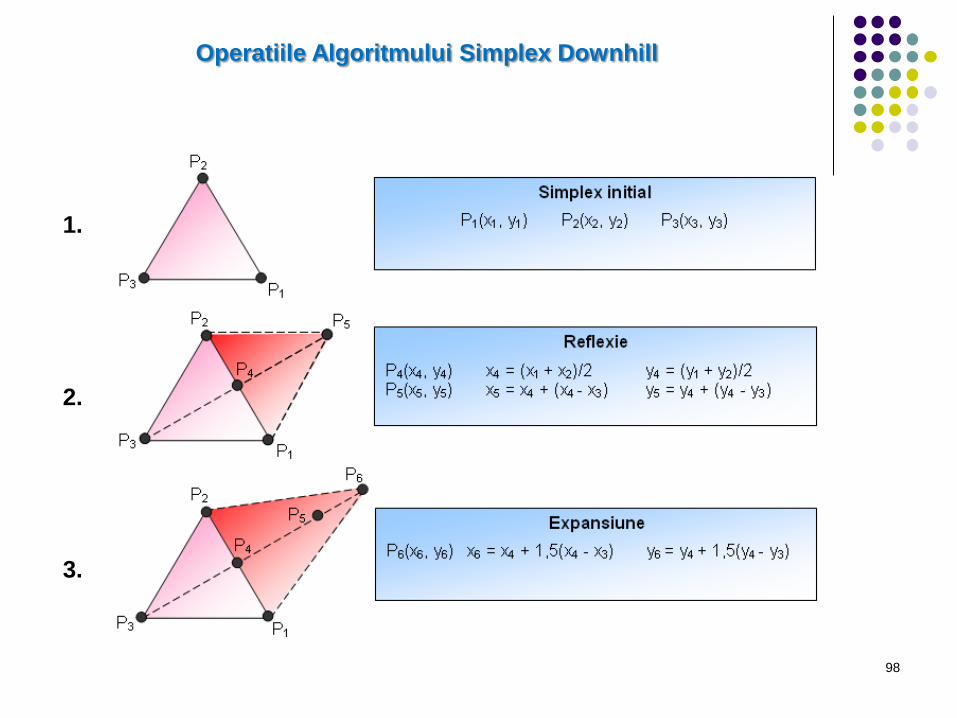
ASD presupune o serie de pasi, in mare parte pentru a deplasa
punctul in care FO ia valoarea cea mai mare (pt. pb. de
minimizare).
Deplasarea acestui punct se face spre fata opusa a simplexului,
intr-un punct in care se presupune ca FO ia o valoare mai mica.
Acest tip de operatie se numeste reflexie si este construita asa
incat simplexul sa pastreze acelasi volum ca cel initial. Pentru a
accelera viteza de cautare, simplexul este capabil sa efectueze si
operatii de expansiune.
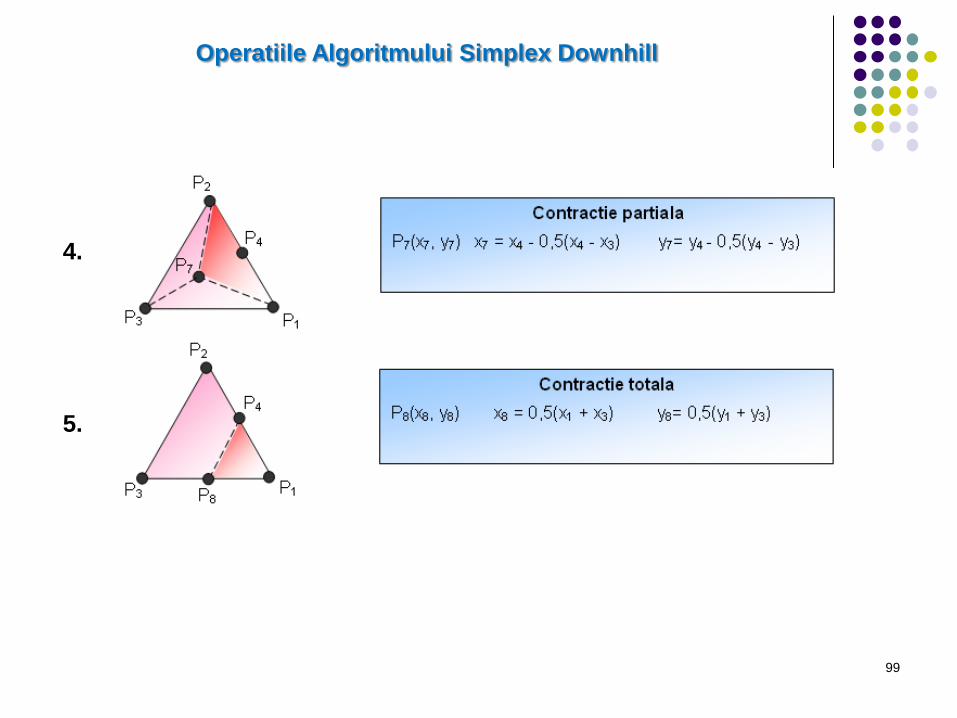
Cand ajunge intr-o vale, simplexul se contracta in directie
transversala, operatia numindu-se contractie partiala, si incearca
sa avanseze mai profund in jos, spre punctul de minim local. Este
posibil ca simplexul sa fie obligat de a penetra in anumite crevase
foarte stramte. in acest caz, simplexul efectueaza o contractie in
toate directiile, care se numeste contractie totala, pentru a ajunge
la punctul de minim.
Reflexia, expansiunea si contractia partiala conduc la modificarea
coordonatelor unui singur punct din cele n+1 ale simplexului, iar
contractia totala determina modificarea coordonatelor a n puncte
din cele n+1 existente.
98
Operatiile Algoritmului Simplex Downhill
1.
2.
3.
99
Operatiile Algoritmului Simplex Downhill
4.
5.

100
Pasii Algoritmului Simplex Downhill [4]
Pas 1 : Alegerea pct. simplexului initial P1(x1, y1), P2(x2, y2), P3(x3, y3);
Pas 2 : Calculul valorilor V1, V2, V3 ale FO in cele 3 pct. ale simplexului;
Pas 3 : Ordonarea celor 3 pct. ale simplexului asa incat V1< V2< V3 ;
Pas 4 : Calculul valorii V5 a FO in punctul reflectat P5(x5, y5);
Pas 5 : Daca V5 < V1 atunci se incearca o expansiune;
- Calculul valorii V6 a FO in pct. P6;
- Daca V6 < V5 atunci P6 ia locul lui P3 (expansiune reusita);
- Altfel (adica V6 >= V5) P5 ia locul lui P3;
Pas 6 : Altfel (adica V5 >= V1)
- Daca V5 < V2 atunci P5 inlocuieste P3;
- Altfel (adica V5 >= V2)
- Daca V5 < V3 atunci P5 inlocuieste P3;
- Calculul valorii V7 a FO in pct. P7;
- Daca V7 < V3 atunci P7 inlocuieste P3;
- Altfel (adica V7 >= V3):
- Calculul valorii V8 a FO in pct. P8;
- P8 inlocuieste P3 si P4 inlocuieste P2;
Pas 7 : Daca nu este indeplinita conditia de oprire se merge la Pas 2.

101
2.5.2.4. Algoritmul Random Search
ARS face parte din clasa algoritmilor stochastici si permite o
explorare aleatoare a domeniului de cautare in vederea gasirii
punctului de minim al functiei obiectiv.
Avantajele ARS:
- Este un algoritm de ordinul 0, deci nu necesita decat evaluarea
functiei obiectiv si nu si a derivatelor sale,
- Este simplu de inteles, respectiv de implementat si este bine
adaptat aplicatiilor practice.
Varianta imbunatatita a ARS tine cont de urmatoarele observatii :
- Daca alegerea unei directii de cautare conduce la o valoare mai
mare a functiei obiectiv, directia opusa ar putea conduce la o
valoare mai mica;
- Daca o anumita directie de cautare conduce la rezultate pozitive,
aceasta ar trebui sa polarizeze cautarile uterioare. Dimpotriva,
esecuri succesive dupa o anumita directie de cautare, ar trebui sa
descurajeze cautarile ulterioare dupa respectiva directie.

102
Pasii Algoritmului Random Search imbunatatit [4]
Pas 1: Se alege pct. de plecare x si se initializeaza polarizarea
p = 0 ;
Pas 2: Se adauga un termen p si un vector aleator dx la pct. curent x
si se evalueaza FO in pct. x + p + dx ;
Pas 3: Daca f(x + p + dx) < f(x), atunci noul pct. curent devine
x + p + dx si noul termen de polarizare devine 0.2p + 0.4dx si apoi se
merge la Pas 6 altfel se trece la pasul urmator;
Pas 4: Daca f(x + p - dx) < f(x), atunci noul pct. curent devine
x + p - dx si noul termen de polarizare devine p – 0.4dx si apoi se
merge la Pas 6 altfel se trece la pasul urmator;
Pas 5: Se modifica polarizarea 0.5 p si apoi se merge la Pas 6 ;
Pas 6: Se opreste calculul daca nr. Maxim de evaluari a FO a fost
atins, altfel se merge la Pas 2.
103
2.5.3. Rezolvarea problemelor inverse
Algoritmii de optimizare se folosesc deseori la rezolvarea
problemelor inverse (probleme de sinteza).
Rezolvarea unei probleme inverse presupune in general
rezolvarea unui numar important de probleme directe (probleme
de analiza) pana cand criteriul de precizie este indeplinit.
Numarul de probleme directe ce trebuie rezolvat este dependent
de mai multe criterii precum:
-Numarul de parametrii ai FO,
-Forma reliefului FO,
-Gradul de precizie dorit,
Etc.

104
2.5.3.1. Exemple de probleme inverse
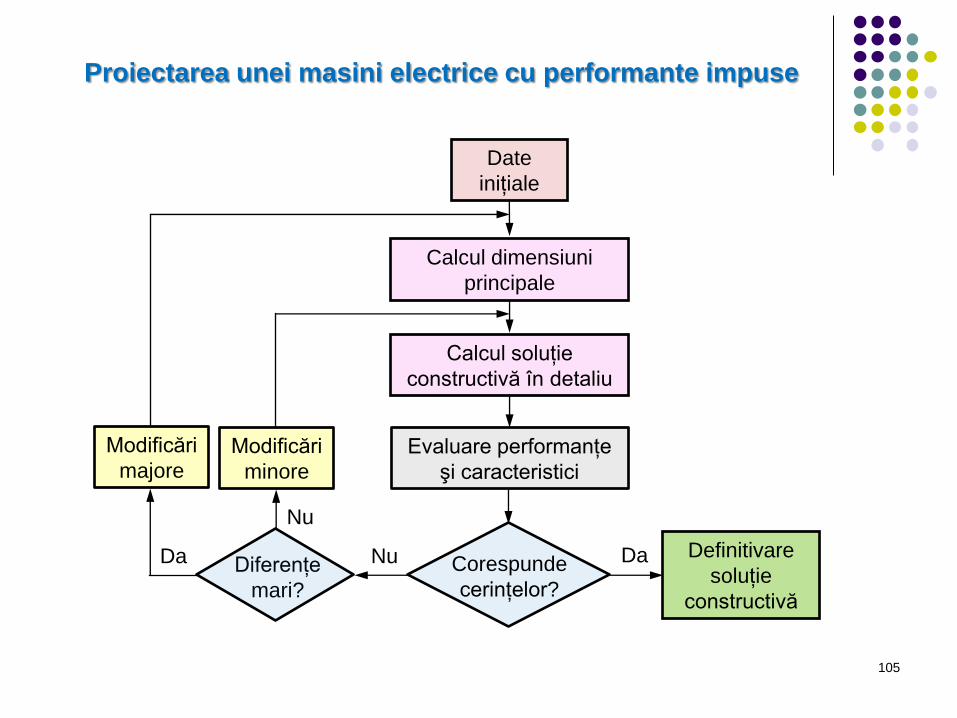
a) Proiectarea unei masini electrice cu performante impuse
-Rezolvarea problemei necesita redimensionarea masinii
(prin modificarea unui numar n de parametri) de un anumit
numar de ori pana cand performantele masinii obtinute sunt
suficient de apropiate de cele impuse.
-FO ce trebuie minimizata se poate defini:
FO(p1, p2, …, pn) =
unde:
- p1, p2, …, pn reprezinta cei n parametri dimensionali
modificabili,
- pi1, pi2, …, pim reprezinta cele m performante impuse,
- pr1, pr2, …, pm reprezinta cele m performante realizate,
m
1k
prkpik
105
Proiectarea unei masini electrice cu performante impuse
Date
iniţiale
Calcul dimensiuni
principale
Corespunde
cerinţelor?
Da Definitivare
soluţie
constructivă
Nu Diferenţe
mari?
Nu
Modificări
minore
Modificări
majore
Da
Calcul soluţie
constructivă în detaliu
Evaluare performanţe
şi caracteristici
106
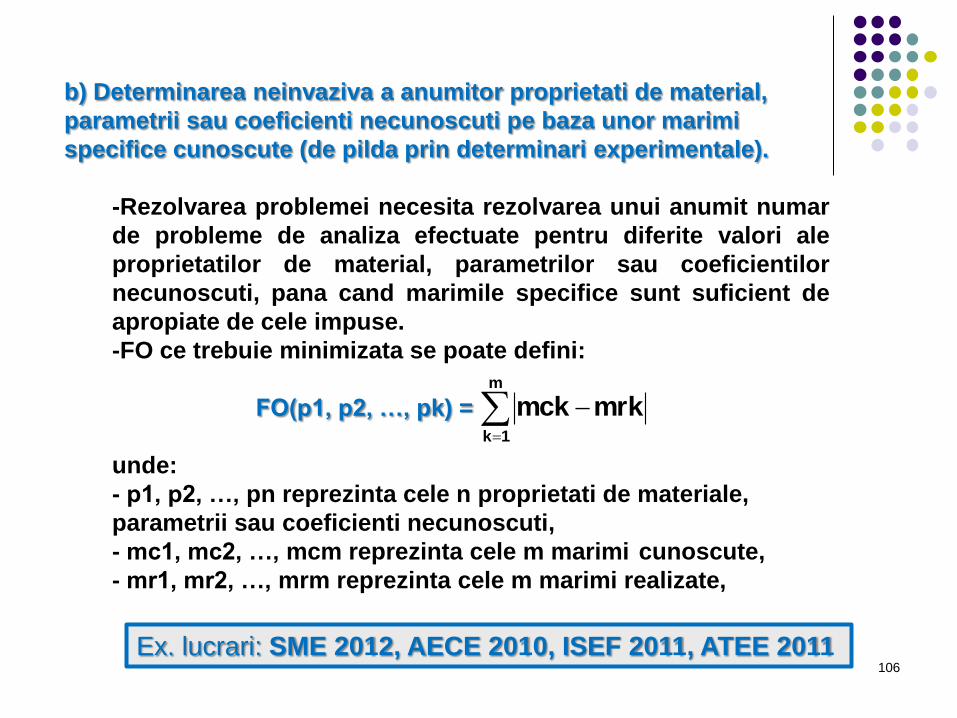
b) Determinarea neinvaziva a anumitor proprietati de material,
parametrii sau coeficienti necunoscuti pe baza unor marimi
specifice cunoscute (de pilda prin determinari experimentale).
-Rezolvarea problemei necesita rezolvarea unui anumit numar
de probleme de analiza efectuate pentru diferite valori ale
proprietatilor de material, parametrilor sau coeficientilor
necunoscuti, pana cand marimile specifice sunt suficient de
apropiate de cele impuse.
-FO ce trebuie minimizata se poate defini:
FO(p1, p2, …, pk) =
unde:
- p1, p2, …, pn reprezinta cele n proprietati de materiale,
parametrii sau coeficienti necunoscuti,
- mc1, mc2, …, mcm reprezinta cele m marimi cunoscute,
- mr1, mr2, …, mrm reprezinta cele m marimi realizate,
m
1k
mrkmck
Ex. lucrari: SME 2012, AECE 2010, ISEF 2011, ATEE 2011
107
3. REZOLVAREA PRIN MEF A PROBLEMELOR DE CAMP
ELECTROMAGNETIC SI TERMIC
3.1. Introducere
-Cunoasterea campurilor electromagnetic si termic in masinile
electrice permite dimensionarea corecta a acestora si calculul
performantelor globale in regimuri de functionare permanente sau
tranzitorii.
-Rezolvarea problemelor de camp electromagnetic si termic au la
baza ecuatii diferentiale cu derivate partiale specifice regimurilor
de camp studiate (regim magnetostatic, magnetodinamic,
magnetic tranzitoriu, termic stationar, termic tranzitoriu etc.).
-Metoda cea mai flexibila si generala care permite rezolvarea
ecuatiilor diferentiale cu derivate partiale in domenii de calcul
neomogene, cu luarea in calcul a neliniaritatilor, este Metoda
Elementelor Finite (MEF).

108
Sa consideram o problema de camp definita pe un domeniu de
calcul W, descrisa de ecuatia diferentiala cu derivate partiale:
unde L reprezinta operatorul diferential de ordinul n asociat
problemei de camp, F este functia necunoscuta ce apartine
spatiului de solutii admisibile (denumita si variabila de stare), iar f
este o functie cunoscuta in tot domeniul de calcul, reprezentand
sursa de camp.
Se considera cunoscute conditiile pe frontierele ce marginesc
domeniul de calcul W.
MEF presupune in primul rand discretizarea domeniului de
calcul in subdomenii disjuncte denumite elemente finite, notate
cu Fe unde iar M este numarul total de elemente finite.
3.2. Metoda Elementelor Finite
fΦL
M 1,e
109
Elementele finite pot fi de pilda segmente in aplicatii 1D,
triunghiuri sau patrulatere in aplicatii 2D, tetraedre, prisme sau
hexaedre in aplicatii 3D.
Operatia de discretizare in elemente finite a domeniului de
calcul este foarte importanta pentru o solutionare corecta a unei
probleme de camp. Modul in care este construita reteaua de
elemente finite influenteaza necesarul de memorie, timpul si
precizia de calcul a solutiei de camp.
Reteaua de discretizare in elemente finite trebuie indesita in
regiunile de interes si caracterizate de variatii importante ale
marimii de stare (ex. intrefierul masinilor electrice unde se
concentreaza cea mai mare parte a energiei magnetice
dezvoltate).
Exista algoritmi de rafinare locala automata a retelei de
discretizare (discretizare adaptiva) in vederea obtinerii unei
precizii suficient de bune a solutiei de camp cu un efort de calcul
redus.
110
Se considera ca la nivelul fiecarui element finit variabila de stare
prezinta o variatie polinomiala de ordinul 1 sau 2 (rar se intalnesc
variatii polinomiale de ordine superioare) in functie de
coordonatele spatiale. Pe baza acestei ipoteze variabila de stare
este reprezentata la nivelul fiecarui element printr-o dependenta
de valorile sale necunoscute in nodurile retelei de discretizare si
de anumite functii cunoscute (functii de forma) ce depind de
geometria elementului finit.
unde n reprezinta numarul de noduri ale elementului (e), este
functia functia de forma a elementului (e), iar reprezinta
valoarea aproximativa a functiei necunoscute in nodul j,
Prin aplicarea Metodei Variationale sau a Metodei Reziduurilor
Ponderate se obtine un sistem de ecuatii avand ca necunoscute
valorile variabilei de stare in nodurile elementelor finite.
eTeeTen
1j
e
j
e
j
e NΦΦNΦNΦ
e
jΦ
e
jN
111
Metoda Variationala presupune ca functiei necunoscute F sa i se
asocieze o functionala prin a carei minimizare (/F =0) sa se
obtina solutia care verifica atat ecuatia de baza cat si conditiile la
limita.
Conform acestei metode se alege un sistem complet de functii
de baza, liniar independente, Ni , i = 1, ..., n, iar solutia exacta este
aproximata prin:
Coeficientii ci sunt determinati din conditia de minimizare a
functionalei .
Metoda Reziduurilor Ponderate presupune in primul rand
definirea reziduului pe baza functiei aproximative prin relatia:
n
1i
iiNcΦ Φ~
)Φ(~
Φ~
f-ΦL)ΦR(~~
112
Se alege un sistem complet de functii de baza liniar
independente, Ni , i=1, ..., n, iar solutia exacta este aproximata
prin:
Reziduul R are valoarea zero doar pentru solutia exacta .
Pentru determinarea coeficientilor ci se impune pentru fiecare
functie Wj numite functii pondere conditia de anulare a reziduului
in medie pe intregul domeniul de calcul al problemei.
Functiile pondere Wj pot fi identice cu functiile de forma Ni
(Metoda Galerkin cea mai utilizata) sau pot fi functii Dirac
(Metoda Colocatiei) etc.
0d )ΦR( Wj WW
~
n
1i
iiNcΦ Φ~
Φ
113
Conditiile pe frontiere se definesc tot in decursul acestei etape si
pot fi de mai multe tipuri. Cele mai cunoscute sunt conditiile de tip
Dirichlet, ce sunt aplicate direct asupra variabilelor de stare sau
conditiile de tip Neumann sau naturale ce rezulta de regula in mod
implicit din formularea insasi.
Ecuatia diferentiala initiala se transforma prin operatiile de mai
sus intr-un sistem de n ecuatii cu n necunoscute, numarul n fiind
determinat de numarul elementelor finite si de numarul
coeficientilor necunoscuti ci. Sistemul de ecuatii obtinut are forma
matriceala:
Rezolvarea sistemului de ecuatii utilizand metode numerice
specifice precum Metoda Gradientului Conjugat, Metoda
Gradientului Biconjugat, Metoda Generalizata a Reziduului Minimal
etc. permite determinarea valorilor variabilei de stare in
nodurile retelei de discretizare si ulterior prin interpolare in orice
punct al domeniului de calcul.
Pe baza solutiei de camp se pot procesa alte marimi locale sau
globale derivate ale variabilei de stare.
Φ
BXA

114
In regim general variabil, in medii imobile, formele locale ale
legilor campului electromagnetic (ecuatiile lui Maxwell) se pot
exprima dupa cum urmeaza:
- Legea inductiei electromagnetice
- Legea circuitului magnetic
- Legea fluxului magnetic
3.3. Ecuatiile generale ale campului electromagnetic
t
BErot
t
DJHrot
0B div
unde: E este intensitatea campului electric, B inductia magnetica,
H intensitatea campului magnetic, J densitatea curentului electric,
D inductia electrica.
115
- Legea fluxului electric
- Legea conservarii sarcinii electrice
- Legi de material
t
ρJdiv v
vρD div
EDD
HBB
EJJ
116
3.4. Modele diferentiale ale campului electromagnetic
exprimate in potentiale
3.4.1. Regimul magnetic stationar. Formularea in potential
magnetic vector A
In functionare, bobinele dispozitivelor electromagnetice sunt
parcurse de curenti. Pentru un moment de timp precizat si o
pozitie fixata a armaturilor, regimul campului poate fi considerat de
tip magnetic stationar. In acest caz sursa campului este
reprezentata de valorile instantanee ale curentilor din infasurari si
de magnetizatia remanenta.
Din legea fluxului magnetic inductia magnetica se poate scrie
sub forma:
B = rot A
unde A se numeste potential magnetic vector.
117
Pe baza legii circuitului magnetic si a legilor de material ecuatia
diferentiala specifica regimului magnetic stationar devine:
In regiunile de tip magnet permanent ce au caracteristica de
demagnetizare liniara putem scrie:
rB
μ
1rotJArot
μ
1rot
JArotμ
1rot
Unicitatea solutiei ecuatiei diferentiale de mai sus necesita
cunoasterea divergentei variabilei de stare A. Cel mai adesea se
impune conditia de etalonare Coulomb div A = 0.
118
Pe suprafata de separatie dintre doua regiuni 1 si 2 cu perm.
magnetice m1 si m2 se conserva Bn si Ht.
Continuitatea lui Bn este asigurata prin continuitatea variabilei de
stare A
Continuitatea lui Ht se impune prin conditia:
0nArot
μ
1Arot
μ
1122
2
1
1
unde n12 reprezinta normala la suprafata de separatie dintre mediile
1 si 2.
119
3.4.2. Regimul magnetodinamic. Formularea in potential
magnetic vector in aplicatii 2D
Acest regim al campului electromagnetic permite studiul
regimurilor permanente ale echipamentelor electrice caracterizate
de tensiuni si curenti sinusoidali (de ex. masina asincrona daca
se neglijeaza saturatia magnetica). Ecuatia diferentiala
caracteristica in aplicatii 2D se scrie:
rot [(1/μ). rot A] = Js – j. ω. σ. A
unde:
Js este densitatea curentilor sursa;
σ este conductivitatea electrica;
ω = 2pf, este pulsatia campului electromagnetic.

120
In cazul dispozitivelor
electromagn. alimentate in
tensiune, curentii ce
strabat circuitele electrice
sunt apriori necunoscuti,
acestia rezultand in functie
de impedantele circuitelor
respective.
Pentru a modela
dispozitivele modelul de
camp trebuie in mod uzual
cuplat cu un model de
circuit asociat.
Se prezinta modelul de
circuit asociat modelului
de camp electromagnetic
2D al motorului asincron.
3.5. Modele de circuit asociate modelelor de camp elmg.

121
Modelul diferential al conductiei termice este exprimat prin
ecuatia lui Fourier:
unde:
r este densitatea materialului;
C este caldura specifica;
k este conductivitatea termica;
T este temperatura;
p este densitatea de volum a surselor de caldura
3.6. Modelul diferential al conductiei termice
pgradT)div(kdt
dTcρ

122
Unicitatea solutiei ecuatiei lui Fourier presupune impunerea
conditiilor la limita (conditii initiale si pe frontiere):
- Conditii initiale (temperatura initiala):
- Conditii pe frontiere uzuale:
- de tip Dirichlet:
- de tip Neumann omogen:
- de tip Neumann neomogen:
unde:
a este coeficientul de transfer prin convectie
s = 5.67. 10-8 W/m2⋅K4 este constanta lui Stefan – Boltzmann
e este coeficientul de transfer prin radiatie
Ta este temperatura mediului ambiant
0tpentru,Tt)z,y,T(x, 0
0t pentru),T σε(T)Tα(Tn
θ k 4 4
aa
0tpentru,n
θ
0
0,t pentru z,0)y,T(x,

123
4. PROIECTAREA OPTIMALA A MASINILOR ASINCRONE
4.1. Formularea temei de proiectare
Tema de proiectare a unei masini asincrone contine de regula
urmatoarele date:
-Date nominale (sau o parte a lor):
- Puterea nominala Pn a motorului in kW
- Tensiunea nominala de alimentare in V (valoare de linie)
- Frecventa tensiunii de alimentare f1 in Hz
- Turatia de sincronism n1 in rot/min
- Numarul de faze m (uzual m = 3)
-Alte date constructiv-functionale:
- Tipul motorului: cu rotor bobinat sau in scurtcircuit
- Caracteristicile de functionare Mm/Mn si de pornire Mp/Mn
si Ip/In (pt. rotor in scurtcircuit)
- Gradul de protectie
- Conditii privind mediul, altitudinea, serviciul de
functionare etc.
- Forma constructiva si modul de montaj etc.

124
4.2. Determinarea marimilor de baza si a dimensiunilor
principale ale masinii
4.2.1. Determinarea marimilor de calcul
4.2.1.1. Numarul de perechi de poli. Se foloseste relatia de definitie a
turatiei de sincronism:
n1 = 60. f1 / p => p = 60. f1 / n1
4.2.1.2. Puterea aparenta absorbita nominala Sn si curentul nominal
pe faza Inf.
Sn = √3. Un. In = 3. Unf
. Inf = Pn/ (. cosj)
Inf = Sn/(3.Unf) = Pn/ (3. Unf. . cosj)
Pentru motoare trifazate conectate in Y: Un = √3. Unf iar pentru
motoare trifazate conectate in Δ: Un = Unf
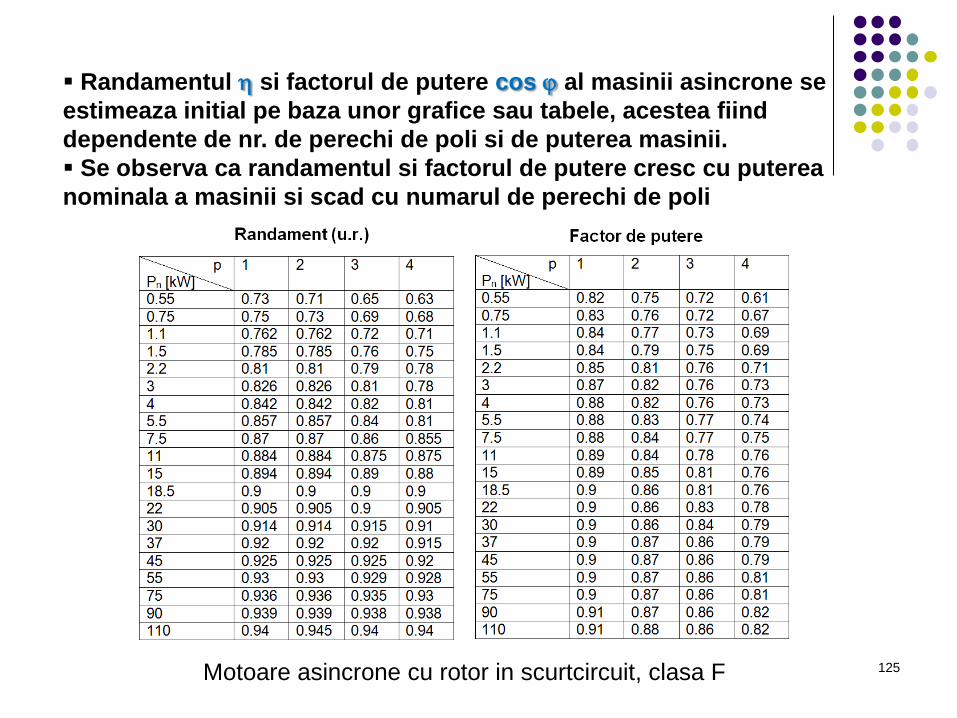
125
Randamentul si factorul de putere cos j al masinii asincrone se
estimeaza initial pe baza unor grafice sau tabele, acestea fiind
dependente de nr. de perechi de poli si de puterea masinii.
Se observa ca randamentul si factorul de putere cresc cu puterea
nominala a masinii si scad cu numarul de perechi de poli
Motoare asincrone cu rotor in scurtcircuit, clasa F

126
4.2.1.3. Tensiunea electromotoare de faza E1 si puterea electromag.
aparenta Se. Se foloseste ecuatia de tensiuni a statorului si diagrama
fazoriala aferenta:
U1 = Z1. I1 - E1 deci -E1 = U1 - Z1
. I1
unde U1 este tensiunea de alimentare pe faza. U1 = Un /√3 pentru
conexiune Y si U1 = Un pentru conexiune Δ.
Z1 = R1 + j.Xs1 ≈ j.Xs1 este impedanta statorica de faza. Deci:
E1 = kE. U1
unde kE = 1 – Xs1 I1 sin j /U1 [2].
T.e.m. de fază si fluxul magnetic se mai pot scrie (pentru
fundamentala):
E1 = √2 . p . f1 . w1
. kw1 . F1
F1 = (2 / p) . t . Li . Bd1
unde: t = pD/(2p) este pasul polar, Li lungimea ideala a masinii,
Bd1 inductia magnetica in intrefier, f1 frecvenţa tensiunii de alimentare,
w1 numarul de spire, F1 fluxul magnetic pe pol.

127
Schema electrica echivalenta a motorului asincron
U1= R1I1 + jXs1I1 – E1
0 = R2’I2’/s + jXs2’I2’ – E1
I1 + I2’ = I10
E1 = E2’ = - ZMI10 = -jw1w1kw1Fm/√2
ZM = jXmRW/(RW+jXm)
U1 este tensiunea de alimentare de faza
R1 este rezistenta de faza statorica
I1 este curentul de faza statoric
jXs1 este reactanta de dispersie statorica
E1 = E2’ este t.e.m. indusa in infasurarea de faza statorica si rotorica raportata
R2’ este rezistenta de faza rotorica raportata
I2’ este curentul de faza rotoric raportat jXs2’ este reactanta de dispersie a infasurarii rotorice raportate
I10 este curentul de magnetizare
Xm este reactanta de magnetizare
RW este rezistenta corespunzatoare pierderilor in fier
X este marime complexa
X este marime scalara

128
Cand forma t.e.m. nu este sinusoidala aceasta se mai scrie:
E1 = 4 . kB . f1 . w1
. kw1 . F
F = ai . t . Li
. Bd
Unde factorul de
forma al t.e.m. kB
si factorul de
acoperire ideala ai
se aleg din graficul
alaturat ce depinde
de ksd coeficientul de
saturatie magnetica
partiala dintilor [2].
Se poate alege
o valoare initiala a
lui ksd = 1.2 – 1.35.

129
Puterea electromagnetica aparenta Se se scrie sub forma:
Se = m . E1. In sau
Se = kE Sn = kEPn / (. cos j)
4.2.1.4. Factorul de infasurare kw. Factorul de infasurare pt.
armonica fundamentala se determina cu relatia:
unde: kp este factorul de repatizare a infasurarii in crestaturi
ky este factorul de scurtare al pasului principal y1
q este numarul de crestaturi pe pol si faza
a = 2pp/Z = p/mq este unghiul de defazaj dintre doua crestaturi
vecine in grade electrice
Z este nr. de crestaturi
y1 = Z/2p – e este pasul principal al infasurarii in crestaturi
yt = Z/2p = m.q este pasul diametral al infasurarii
p
ty
y
2sin
2
αsinq
2
qαsin
kkk 1ypw

130
Factorul de repartizare a infasurare pt. armonica fundamentala
se determina cu relatia:
De regula se adopta o scurtare a pasului principal cu 1/6 din
pasul diametral pentru diminuarea armonicilor de ordinele 5 si 7:
Daca miezul feromagnetic are crestaturi inclinate factorul de
infasurare include si factorul de inclinare ki si devine:
2mqsinq
2msin
2
αsinq
2
qαsin
kpp
p
6
5
y
y1 t
iypw kkkk
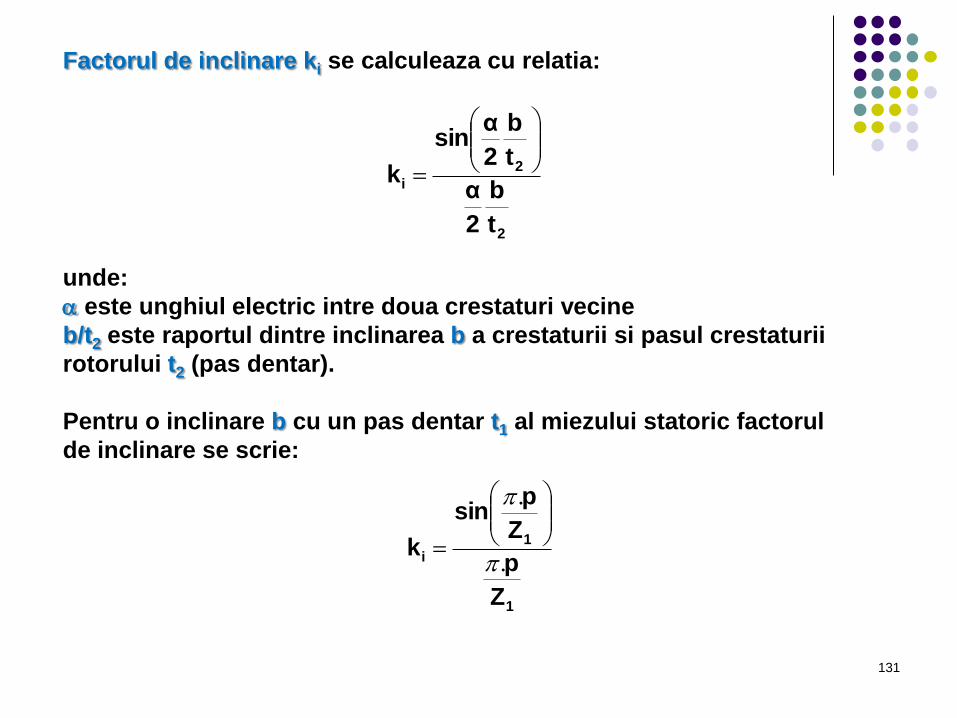
131
Factorul de inclinare ki se calculeaza cu relatia:
unde:
a este unghiul electric intre doua crestaturi vecine
b/t2 este raportul dintre inclinarea b a crestaturii si pasul crestaturii
rotorului t2 (pas dentar).
Pentru o inclinare b cu un pas dentar t1 al miezului statoric factorul
de inclinare se scrie:
2
2
i
t
b
2
α
t
b
2
αsin
k
1
1
i
Z
p
Z
psin
k.
.
p
p

132
Daca nu se cunosc marimile necesare calculului factorului de
infasurare acesta se poate estima pentru calcule preliminare cu
relatia:
kw = 0.91 – 0.93
4.2.2. Determinarea dimensiunilor principale
4.2.2.1. Calculul diametrelor statorului. Diametrul interior D al
statorului se poate predimensiona folosind coeficientul de
utilizare C al masinii dependent de puterea electromagnetica
aparenta Se [2]:
D2 . Li = 60. Se / (n1
. C) [dm3]
unde n1 [rot/min], Se [VA] si C [J/dm3].
O alta relatie intre D si li se obtine pe baza factorului de forma al
masinii l:
l = Li / t de unde
Li = l . t = p. D /(2 . p)
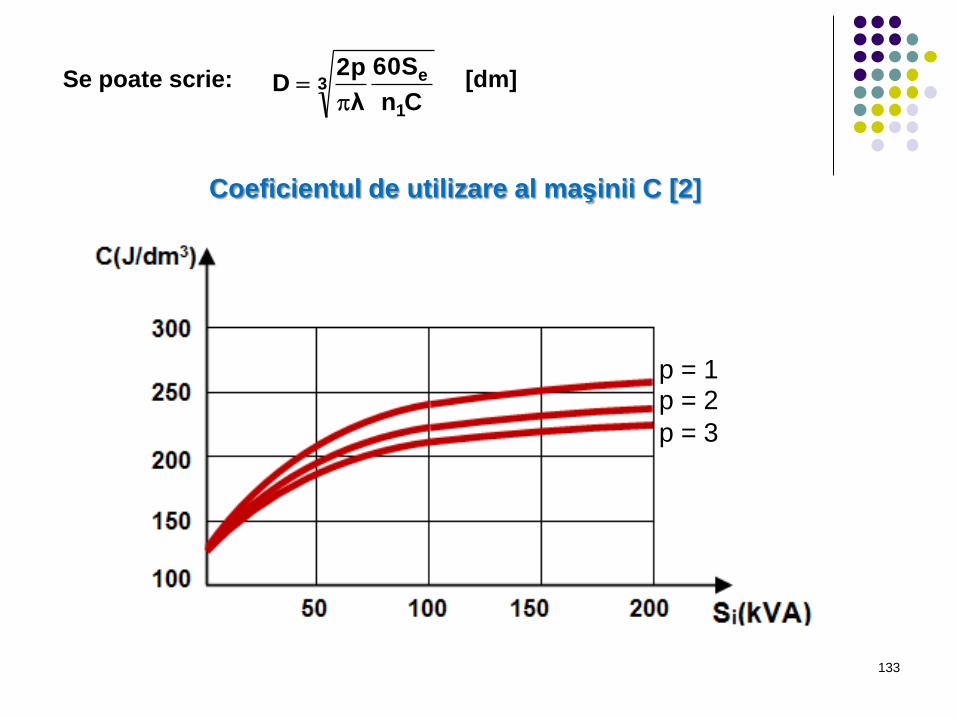
133
Se poate scrie: [dm]
3
1
e
Cn
60S
λ
2pD
p
Coeficientul de utilizare al maşinii C [2]
p = 1 p = 2
p = 3

134
Factorul de forma al masinii l [2]

135
Diametrul interior al masinii D pentru
maşini de c.a. de clasă F [2]
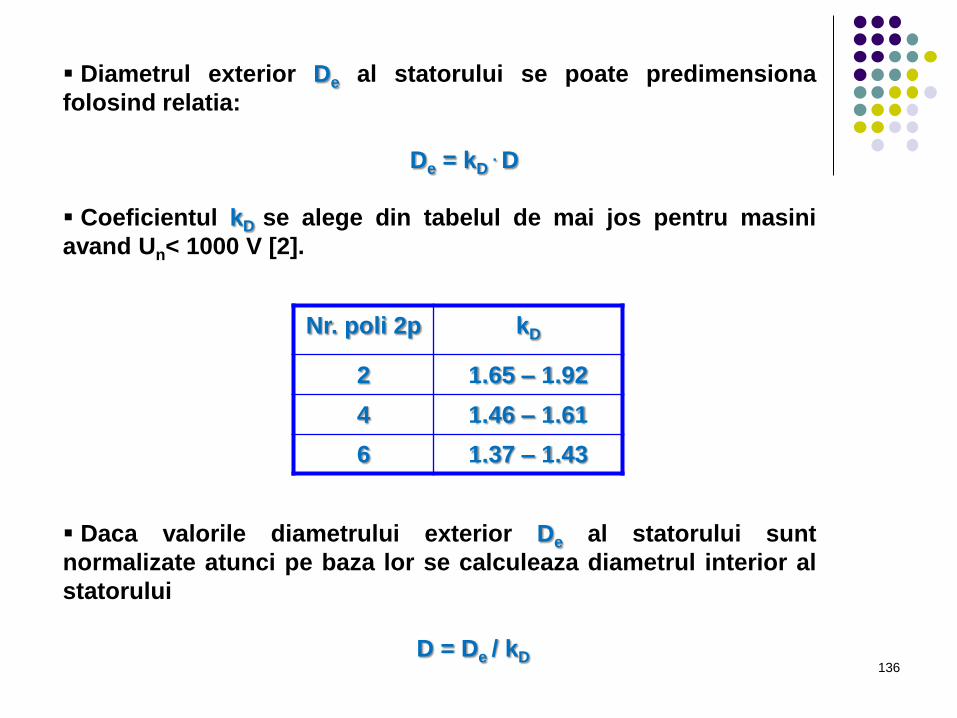
136
Diametrul exterior De al statorului se poate predimensiona
folosind relatia:
De = kD . D
Coeficientul kD se alege din tabelul de mai jos pentru masini
avand Un< 1000 V [2].
Daca valorile diametrului exterior De al statorului sunt
normalizate atunci pe baza lor se calculeaza diametrul interior al
statorului
D = De / kD
Nr. poli 2p kD
2 1.65 – 1.92
4 1.46 – 1.61
6 1.37 – 1.43
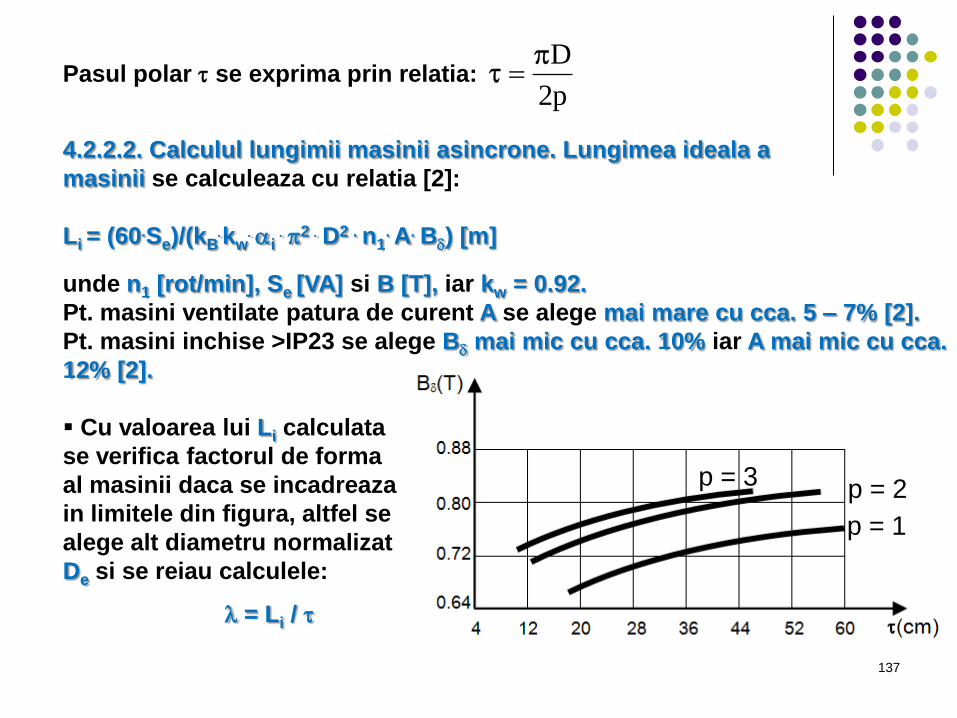
137
Pasul polar t se exprima prin relatia: 2p
Dpt
4.2.2.2. Calculul lungimii masinii asincrone. Lungimea ideala a
masinii se calculeaza cu relatia [2]:
Li = (60.Se)/(kB.kw
. ai . p2
. D2 . n1
. A. Bd) [m]
unde n1 [rot/min], Se [VA] si B [T], iar kw = 0.92. Pt. masini ventilate patura de curent A se alege mai mare cu cca. 5 – 7% [2].
Pt. masini inchise >IP23 se alege Bd mai mic cu cca. 10% iar A mai mic cu cca.
12% [2].
Cu valoarea lui Li calculata
se verifica factorul de forma
al masinii daca se incadreaza
in limitele din figura, altfel se
alege alt diametru normalizat
De si se reiau calculele:
l = Li / t
p = 1
p = 2 p = 3
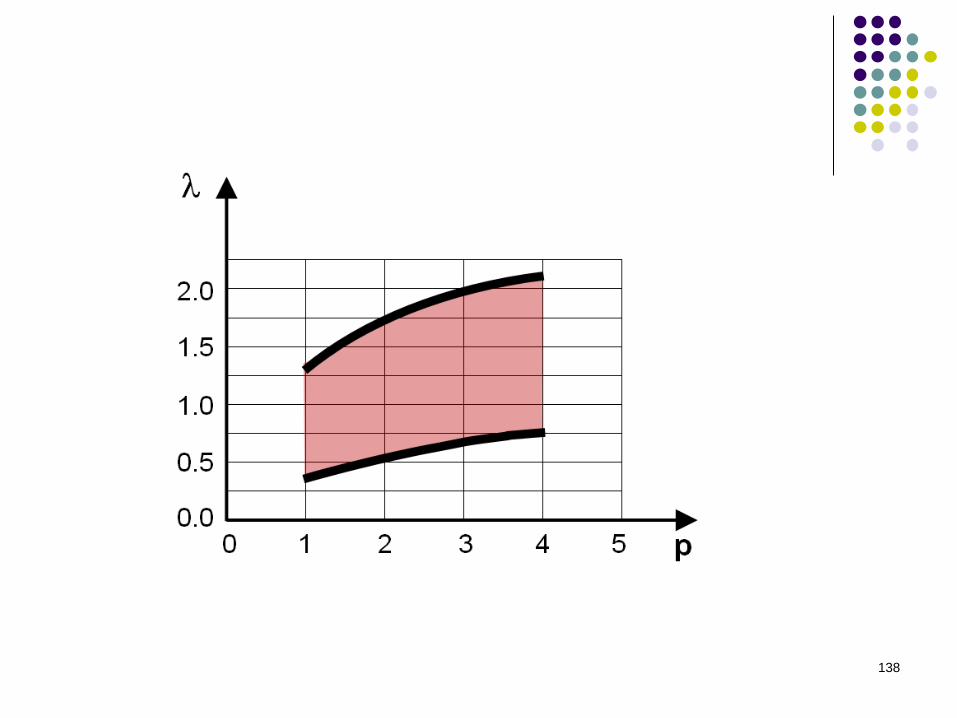
138

139
Miezul feromagnetic poate fi compact sau divizat:
Miezurile compacte (fara canale radiale de ventilatie) se folosesc
pt. diametre mici si lungimi ideale ce nu depasesc 20-25 cm sau
cand se utilizeaza pentru racire canale axiale [2]. Lungimea
geometrica Lg a masinii se calculeaza cu relatia:
Lg = Lfe ≈ Li
Miezurile divizate (cu canale radiale de ventilatie) se folosesc pt.
Li ≥ 25 cm si D ≥ 25-30 cm [2]. Se folosesc arbori cu nervuri radiale
sudate. Lungimea geometrica totala a masinii este:
Lg = Li + nv . bv’ [cm]
unde nv este numarul de canale radiale de ventilatie;
bv este latimea canalelor radiale de ventilatie (1 – 1.5 cm).
bv’ ≈ 0.5bv daca masina are canale radiale doar pe o armatura si
bv’ ≈ bv daca masina are canale radiale pe ambele armaturi (masina
asincrona sau sincrona cu poli inecati).
Lungimea totala a pachetelor de fier este:
Lfe = (nv + 1) . L1 [cm] unde L1 = 4 – 6 cm

140
4.2.2.3. Lungimea intrefierului trebuie sa fie cat mai mica pentru a
obtine un curent de magnetizare mic si un factor de putere mare.
Siguranta in exploatare si limitarile tehnologice de constructie ale
masinii impun evitarea valorilor prea mici ale intrefierului care pot
conduce la frecarea rotorului de stator.
Lungimea intrefierului se poate adopta pe baza unor grafice sau a
unor relatii empirice ca cea de mai jos [3]:
gLD0,00210,12δ
Lungimea intrefierului se rotunjeste din 0,05 mm in 0,05 mm.
Marimile D si Lg se introduc in [mm]
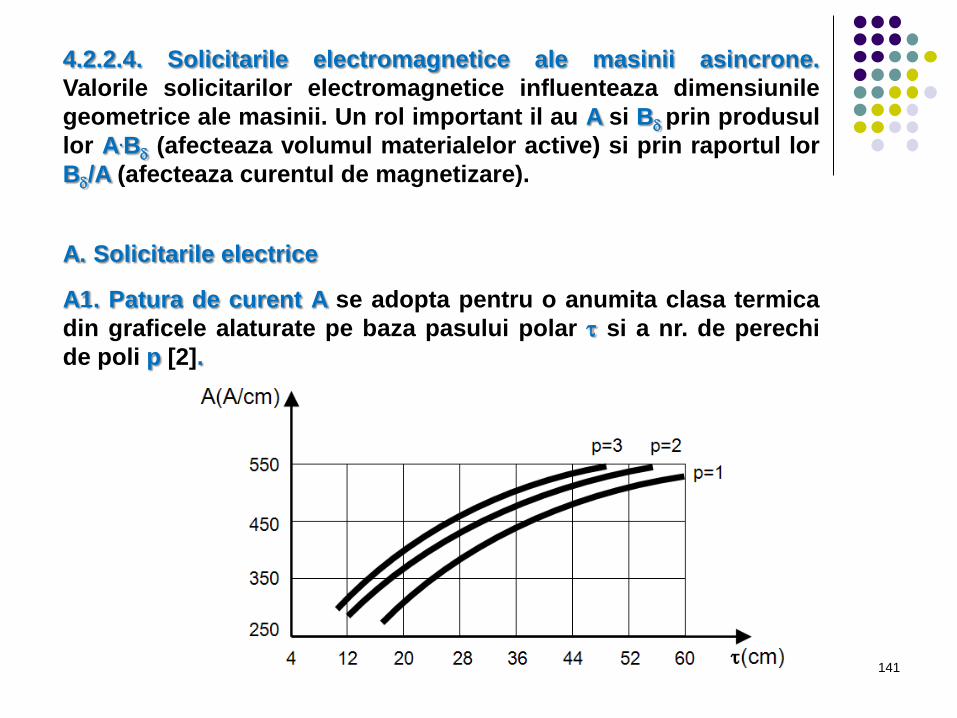
141
4.2.2.4. Solicitarile electromagnetice ale masinii asincrone.
Valorile solicitarilor electromagnetice influenteaza dimensiunile
geometrice ale masinii. Un rol important il au A si Bd prin produsul
lor A.Bd (afecteaza volumul materialelor active) si prin raportul lor
Bd/A (afecteaza curentul de magnetizare).
A. Solicitarile electrice
A1. Patura de curent A se adopta pentru o anumita clasa termica
din graficele alaturate pe baza pasului polar t si a nr. de perechi
de poli p [2].
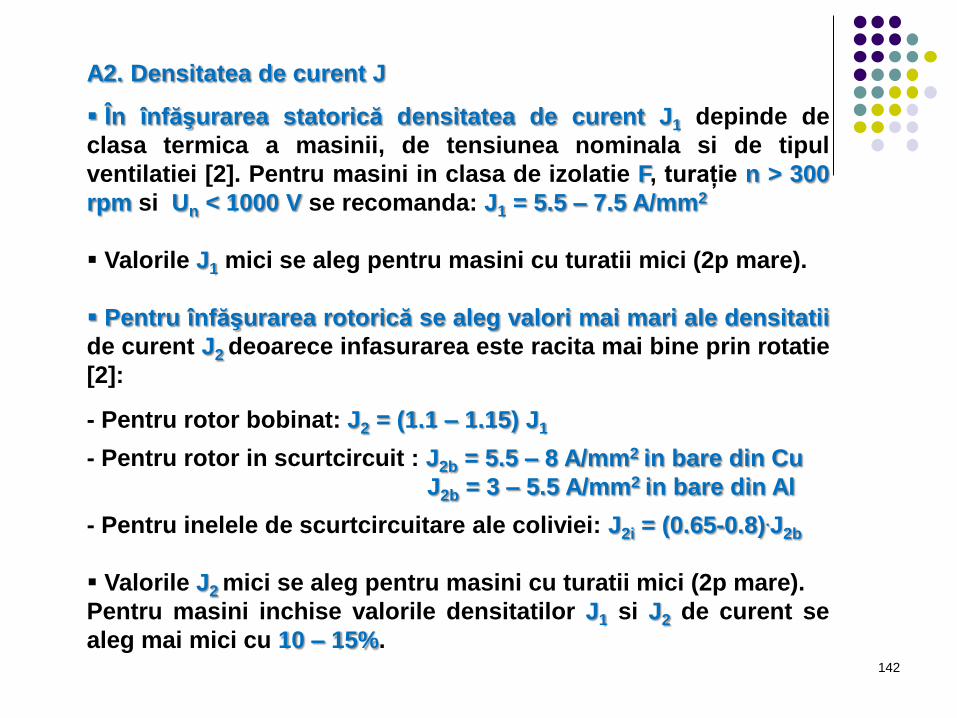
142
A2. Densitatea de curent J
În înfăşurarea statorică densitatea de curent J1 depinde de
clasa termica a masinii, de tensiunea nominala si de tipul
ventilatiei [2]. Pentru masini in clasa de izolatie F, turaţie n > 300
rpm si Un < 1000 V se recomanda: J1 = 5.5 – 7.5 A/mm2
Valorile J1 mici se aleg pentru masini cu turatii mici (2p mare).
Pentru înfăşurarea rotorică se aleg valori mai mari ale densitatii
de curent J2 deoarece infasurarea este racita mai bine prin rotatie
[2]:
- Pentru rotor bobinat: J2 = (1.1 – 1.15) J1
- Pentru rotor in scurtcircuit : J2b = 5.5 – 8 A/mm2 in bare din Cu
J2b = 3 – 5.5 A/mm2 in bare din Al
- Pentru inelele de scurtcircuitare ale coliviei: J2i = (0.65-0.8).J2b
Valorile J2 mici se aleg pentru masini cu turatii mici (2p mare).
Pentru masini inchise valorile densitatilor J1 si J2 de curent se
aleg mai mici cu 10 – 15%.
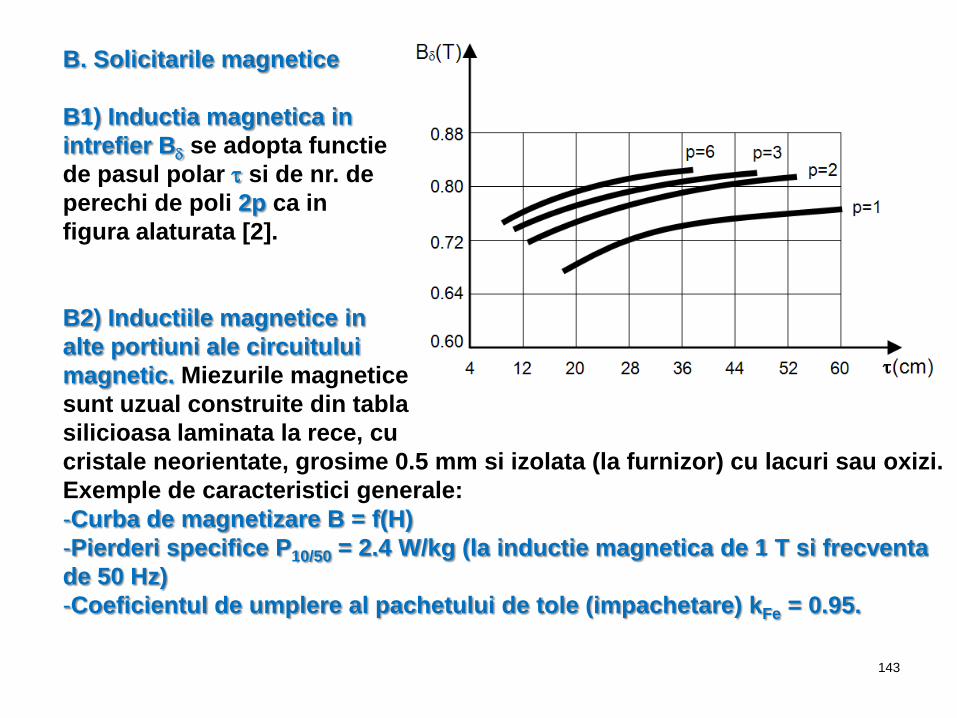
143
B. Solicitarile magnetice
B1) Inductia magnetica in
intrefier Bd se adopta functie
de pasul polar t si de nr. de
perechi de poli 2p ca in
figura alaturata [2].
B2) Inductiile magnetice in
alte portiuni ale circuitului
magnetic. Miezurile magnetice
sunt uzual construite din tabla
silicioasa laminata la rece, cu
cristale neorientate, grosime 0.5 mm si izolata (la furnizor) cu lacuri sau oxizi.
Exemple de caracteristici generale:
-Curba de magnetizare B = f(H)
-Pierderi specifice P10/50 = 2.4 W/kg (la inductie magnetica de 1 T si frecventa
de 50 Hz)
-Coeficientul de umplere al pachetului de tole (impachetare) kFe = 0.95.
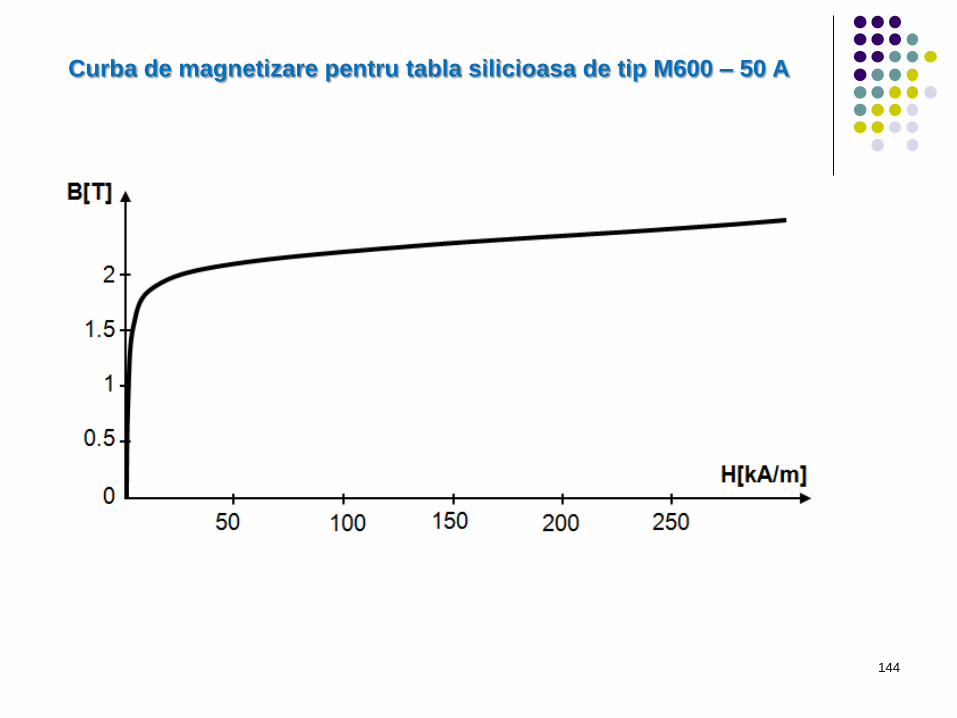
144
Curba de magnetizare pentru tabla silicioasa de tip M600 – 50 A
145
Valorile recomandate ale inductiilor magnetice in diferite portiuni
ale circuitului magnetic sunt [2]:
-In jugul statoric: Bj1 = 1.35 – 1.55 T
-In jugul rotoric: Bj2 = 1.2 – 1.6 T
-In dintii statorului:
-crestaturi cu pereti paraleli:
-In sectiunea minima a dintelui: Bd1max = 1.7 – 2.1 T
-In sectiunea medie a dintelui: Bd1med = 1.5 – 1.7 T
-dinti cu pereti paraleli: Bd1 = 1.4 – 1.7 T
-In dintii rotorului:
-crestaturi cu pereti paraleli:
-In sectiunea minima a dintelui: Bd2max = 1.7 – 2.2 T
-In sectiunea medie a dintelui: Bd2med = 1.5 – 1.8 T
-dinti cu pereti paraleli: Bd2 = 1.5 – 1.8 T

146
4.2.1. Crestaturile statorului
Numarul de crestaturi ale statorului are expresia:
Z1 = 2. m1. p. q1
unde m1 este nr. de faze statorice, p nr. de perechi de poli si q1 nr. de
crestaturi pe pol si faza.
Pasul dentar: t1 = pD/Z1
Se recomanda: 0.05t < t1 < 0.2t
Pt. masini de joasa tensiune si cu t mic se recomanda [2]: 1 cm < t1 < 2.5 cm
Se recomanda: q1 = 4 – 6 pentru p = 1 - 2
q1 = 3 – 5 pentru p = 3
q1 = 3 – 4 pentru p = 4
q1 = 2 – 3 pentru p > 5
4.2. Dimensionarea circuitelor magnetice si electrice

147
Se calculeaza Z1min = pD/t1max si Z1max = pD/t1min
Se calculeaza q1min = Z1min / 2.m1
.p si q1max = Z1max / 2.m1
.p
Se alege q1 ca nr. intreg intre q1min si q1max de preferat spre limita
superioara (inductie magnetica cat mai sinusoidala in intrefier).
Se calculeaza nr. de crestaturi Z1 ale statorului: Z1 = 2. m1. p. q1
Pasul bobinei statorice y1 se calculeaza pt. infasurari in dublu
strat cu relatia: y1 = 5/6. yt = 5/6 . Z1 / (2. p) unde yt este pasul
diametral in crestaturi.
Pasul bobinei statorice y1 se calculeaza pt. infasurari in simplu
strat cu relatia: y1 = yt = Z1 / (2. p)
Factorul de infasurare kw1 se poate calcula sau determina din
tabele.
148
4.2.2. Infasurarea statorului
4.2.2.1. Numarul de spire pe faza
w1 = kE
. U1 / (4. kB
. f1 . kw1
. Ф) = numar intreg
unde Ф = ai . t . Li
. Bd
4.2.2.2. Numarul de conductoare efective in crestatura
nc1 = 2 . m1 . a1
. w1 / Z1 = numar intreg
unde a1 este numarul de cai de curent in paralel pe faza.
149
4.2.2.3. Conditii obligatorii de simetrie la infasurarile trifazate
1) Acelasi numar de bobine pe faza si pe cale de curent
-La infasurarea intr-un strat:
Z1 /(2 . m1 . a1) este numar intreg
-La infasurarea in doua straturi:
Z1 /(m1 . a1) este numar intreg
2) Echilibrarea cailor de curent in paralel pe faza
2. p/a1 este numar intreg, deci a1max = 2. p
3) Acelasi numar de spire pe fiecare faza si cale de curent in paralel
Z1 . nc1 / (2 . m1
. a1) = w1 este numar intreg
4) T.e.m. induse pe faza sunt egale si defazate cu 2p/m1
Z1 / (m1 . t) este numar intreg
unde t este cel mai mare divizor comun al perechii (Z1, p)

150
4.2.2.4. Verificari necesare. Pentru definitivarea numarului de
conductoare in crestatura nc1 si a factorului kw1 sunt necesare
calcule de verificare:
a) Verificarea numarului real de spire:
w1 = Z1 . nc1/(2 . m1
. a1) este numar intreg
b) Verificarea paturii de curent:
A = N1 . I1 /(p . D) [A/cm]
unde: N1 = Z1 . nc1 este nr. total de conductoare ale infasurarii.
I = In /a1 este curentul pe o cale de curent
A = Z1 . nc1
. In /(p . D . a1) = nc1 . In /(a1
. t1) [A/cm]
unde In este curentul nominal. Se compara valoarea paturii de
curent A obtinuta cu valorile recomandate din grafice.

151
c) Verificarea valorii maxime a inductiei magnetice in intrefier:
Bd = F/(ai . t . Li) [ T ]
unde fluxul magnetic util F se calculeaza cu relatia:
F = kE . U1 /(4 . kB . f . w1
. kw1) [Wb]
Daca valoarea lui Bd difera mult de cea adoptata se recalculeaza
lungimea ideala a masinii Li .
4.2.2.5. Tipul infasurarii si forma crestaturii
a) Sectiunea conductorului
sCu1 = IN / (a1
. J1) [mm2]
J1 se alege intre limitele recomandate si apoi se determina
sectiunea conductorului sCu1. Se alege apoi un conductor
standardizat apropiat ca sectiune de cel calculat.

152
Tipuri de crestaturi statorice
Crestaturi semideschise/semiinchise ovale si trapezoidale
a) crestatura ovala; b si c) crestaturi partial ovale; d) crestatura
trapezoidala
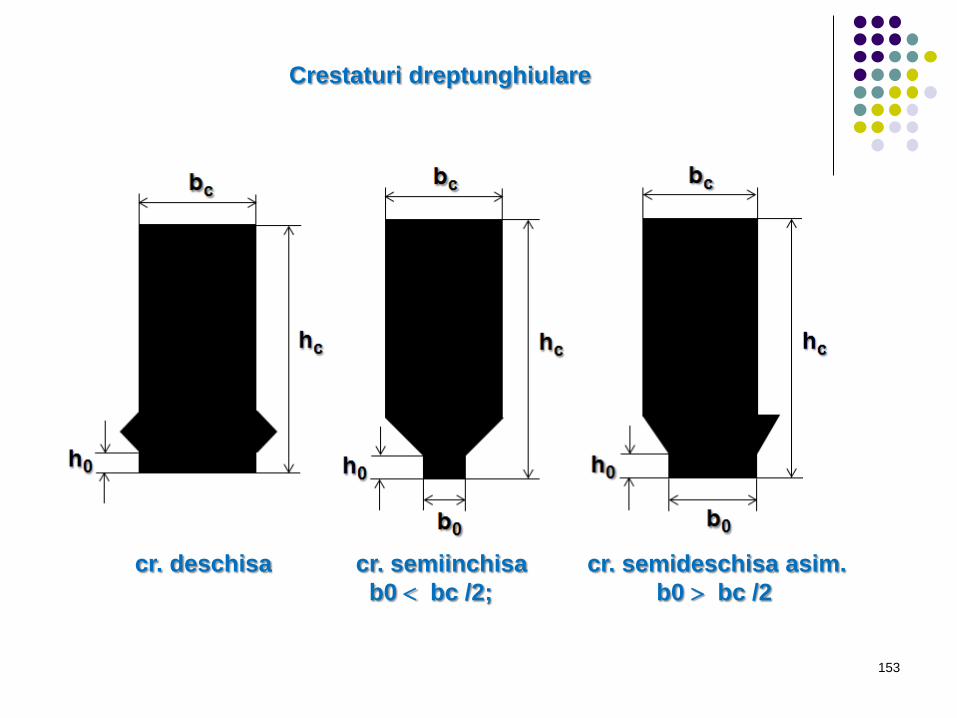
153
Crestaturi dreptunghiulare
cr. deschisa cr. semiinchisa cr. semideschisa asim.
b0 bc /2; b0 bc /2
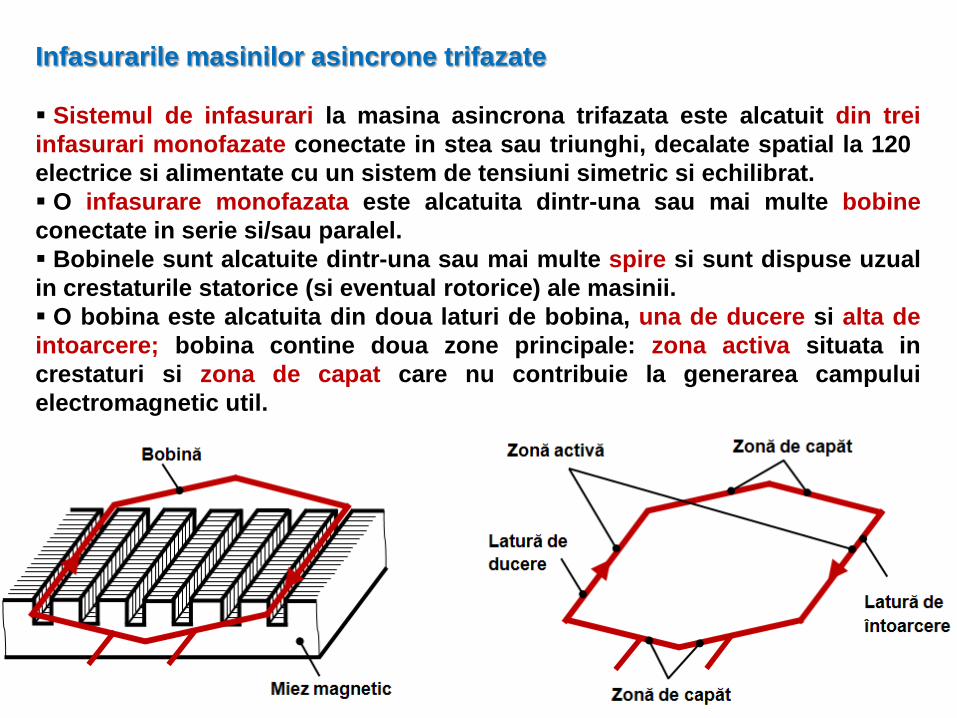
Infasurarile masinilor asincrone trifazate
Sistemul de infasurari la masina asincrona trifazata este alcatuit din trei
infasurari monofazate conectate in stea sau triunghi, decalate spatial la 120
electrice si alimentate cu un sistem de tensiuni simetric si echilibrat.
O infasurare monofazata este alcatuita dintr-una sau mai multe bobine
conectate in serie si/sau paralel.
Bobinele sunt alcatuite dintr-una sau mai multe spire si sunt dispuse uzual
in crestaturile statorice (si eventual rotorice) ale masinii.
O bobina este alcatuita din doua laturi de bobina, una de ducere si alta de
intoarcere; bobina contine doua zone principale: zona activa situata in
crestaturi si zona de capat care nu contribuie la generarea campului
electromagnetic util.
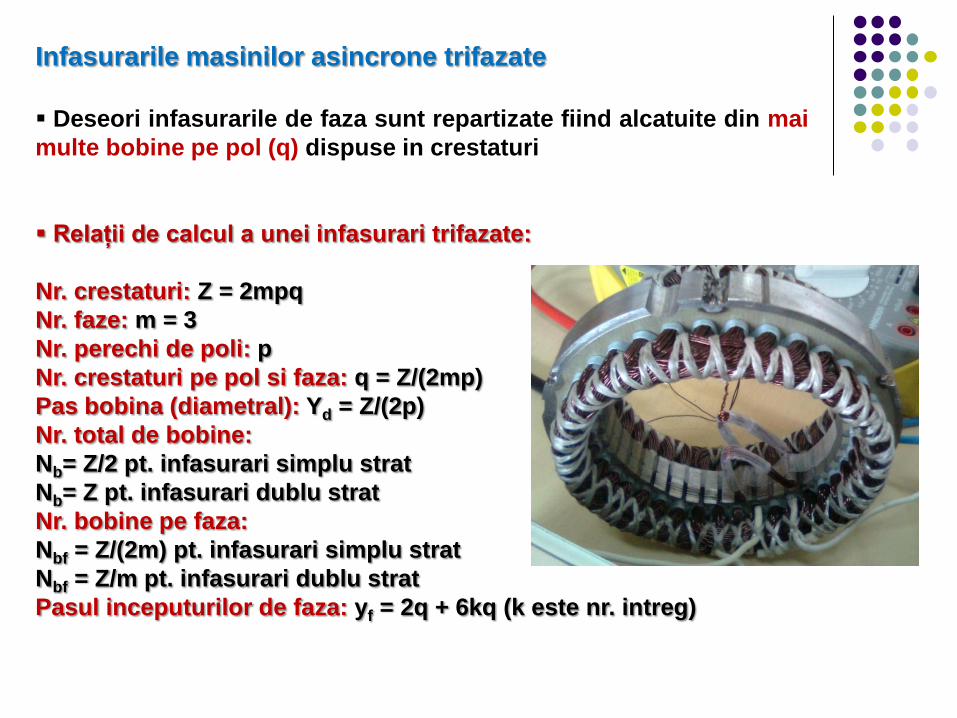
Infasurarile masinilor asincrone trifazate
Deseori infasurarile de faza sunt repartizate fiind alcatuite din mai
multe bobine pe pol (q) dispuse in crestaturi
Relaţii de calcul a unei infasurari trifazate:
Nr. crestaturi: Z = 2mpq
Nr. faze: m = 3
Nr. perechi de poli: p
Nr. crestaturi pe pol si faza: q = Z/(2mp)
Pas bobina (diametral): Yd = Z/(2p)
Nr. total de bobine:
Nb= Z/2 pt. infasurari simplu strat
Nb= Z pt. infasurari dublu strat
Nr. bobine pe faza:
Nbf = Z/(2m) pt. infasurari simplu strat
Nbf = Z/m pt. infasurari dublu strat
Pasul inceputurilor de faza: yf = 2q + 6kq (k este nr. intreg)
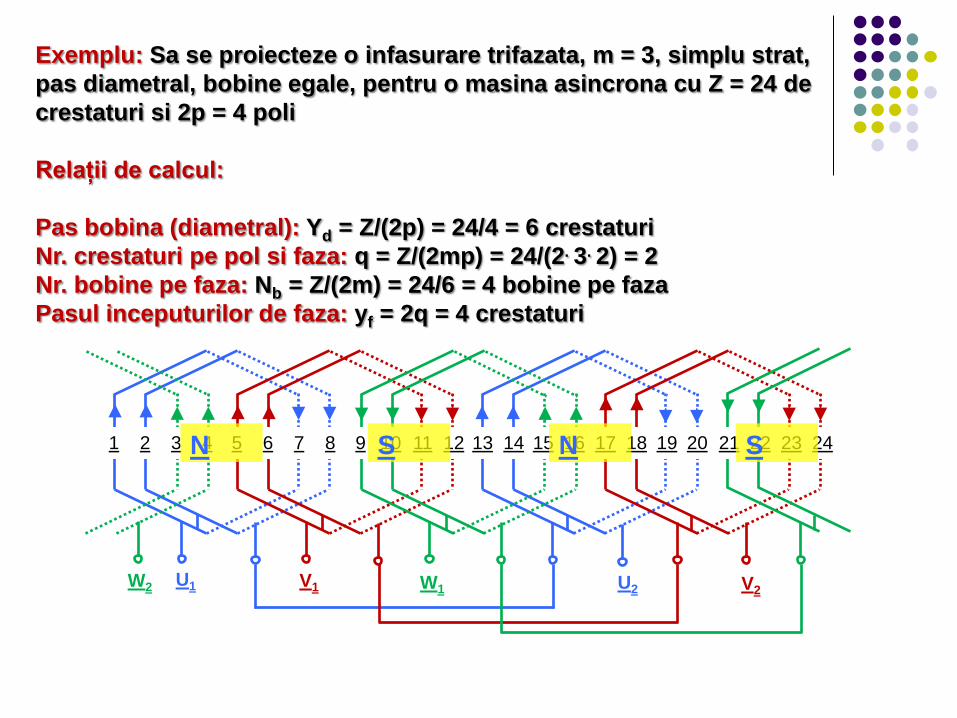
Exemplu: Sa se proiecteze o infasurare trifazata, m = 3, simplu strat,
pas diametral, bobine egale, pentru o masina asincrona cu Z = 24 de
crestaturi si 2p = 4 poli
Relaţii de calcul:
Pas bobina (diametral): Yd = Z/(2p) = 24/4 = 6 crestaturi
Nr. crestaturi pe pol si faza: q = Z/(2mp) = 24/(2. 3. 2) = 2
Nr. bobine pe faza: Nb = Z/(2m) = 24/6 = 4 bobine pe faza
Pasul inceputurilor de faza: yf = 2q = 4 crestaturi
1 2 3 4 5 6 7 8 9 10 11 13 14 15 16 17 18 20 21 22 19 12 23 24
U1 U2 V1 V2 W1
W2
N N S S

157
Exemplu: Sa se proiecteze o infasurare trifazata, m = 3, dublu strat,
pas scurtat 2/3, bobine egale, pentru o masina asincrona cu Z = 24
de crestaturi si 2p = 2 poli
Relaţii de calcul:
Pas diametral: Yd = Z/(2p) = 24/2 = 12 crestaturi
Pas bobina: Yb = 2/3Yd = 9 crestaturi
Nr. crestaturi pe pol si faza: q = Z/(2mp) = 24/(2. 3. 1) = 4
Nr. bobine pe faza: Nb = Z/m = 24/3 = 8 bobine pe faza
Pasul inceputurilor de faza: yf = 2q = 2.4 = 8 crestaturi

158
c) Dimensiunile conductorului si ale crestaturii. Geometria
crestaturii trebuie sa respecte conditiile urmatoare:
b = b’ / t1 0.35 – 0.5
b1 = hc / t 0.1 – 0.15 pt. j.t.
b1 = hc / t 0.15 – 0.25 pt. i.t.
b2 = hc / b’ 2.5 – 8
Pentru conductor rotund se calculeaza latimea constanta a dintelui:
bd = t1
. L1 . Bd
/ (kFe . LFe
. Bdadm) [mm]
unde: kFe = 0.95 iar Bdadm 1.4 – 1.7 T se alege.
Se determina sectiunea neta a crestaturii:
scrn = nc1 . diz
2 / ku [mm2]
unde diz [mm] este diametrul conductorului izolat, iar ku ≤ 0.75
este factorul de umplere al crestaturii [2].
Deschiderea crestaturii se alege asa incat sa poata fi introdus
conductorul izolat in crestatura cu izolatie de crestatura:
b0 ≥ diz + 1.5 mm

159
Inaltimea h0 se adopta in general in domeniul:
h0 = 0,4 – 1 mm
Inaltimea penei crestaturii se adopta, din considerente mecanice,
in functie de puterea masinii, in gama 1 – 3 mm.
8
b'h
2
b'bs
2
crn
p

160
4.2.2. Crestaturile rotorului
Pentru masini cu rotor bobinat, nr. de crestaturi rotorice are
expresia:
Z2 = 2. m2. p. q2
unde m2 = m1 este nr. de faze rotorice, p nr. de perechi de poli si
q2 nr. de crestaturi pe pol si faza.
Pentru evitarea cuplurilor parazite Z2 ≠ Z1 si deci q2 ≠ q1. In mod
uzual se alege q2 = q1 1 [2].
Pentru masini cu rotor in scurtcircuit, nr. de crestaturi rotorice are
expresia:
Z2 = m2
unde m2 este nr. de bare rotorice. Pentru a evita cuplurile parazite
Z2 trebuie sa fie diferit de Z1 si in plus sa verifice anumite conditii
particulare. Astfel se recomanda alegerea sa pe baza unor tabele.
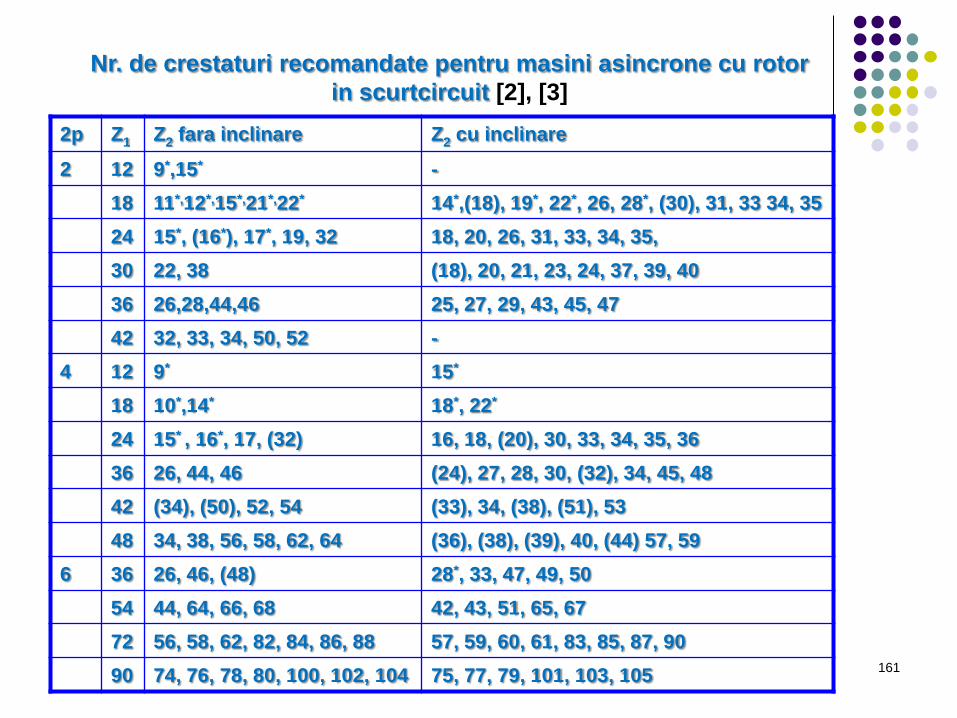
161
Nr. de crestaturi recomandate pentru masini asincrone cu rotor
in scurtcircuit [2], [3]
2p Z1 Z2 fara inclinare Z2 cu inclinare
2 12 9*,15* -
18 11*,12*,15*,21*,22* 14*,(18), 19*, 22*, 26, 28*, (30), 31, 33 34, 35
24 15*, (16*), 17*, 19, 32 18, 20, 26, 31, 33, 34, 35,
30 22, 38 (18), 20, 21, 23, 24, 37, 39, 40
36 26,28,44,46 25, 27, 29, 43, 45, 47
42 32, 33, 34, 50, 52 -
4 12 9* 15*
18 10*,14* 18*, 22*
24 15* , 16*, 17, (32) 16, 18, (20), 30, 33, 34, 35, 36
36 26, 44, 46 (24), 27, 28, 30, (32), 34, 45, 48
42 (34), (50), 52, 54 (33), 34, (38), (51), 53
48 34, 38, 56, 58, 62, 64 (36), (38), (39), 40, (44) 57, 59
6 36 26, 46, (48) 28*, 33, 47, 49, 50
54 44, 64, 66, 68 42, 43, 51, 65, 67
72 56, 58, 62, 82, 84, 86, 88 57, 59, 60, 61, 83, 85, 87, 90
90 74, 76, 78, 80, 100, 102, 104 75, 77, 79, 101, 103, 105

162
4.2.2.1. Pasul dentar rotoric. Dupa alegerea numarului de crestaturi
Z2 se determina pasul dentar rotoric t2 :
t2 = p . Dr / Z2
unde diametrul exterior al rotorului Dr se calculeaza cu relatia:
Dr = D - 2d
4.2.2.2. Dimensionarea conductorului si crestaturii rotorice. T.e.m.
pe faza rotorica se calculeaza cu relatia [2]:
E2 = U20 = E1 . w2
. kw2/ w1. kw1 = kE . U1
. w2. kw2/ w1
. kw1
unde w2 si kw2 sunt numarul de spire si factorul de infasurare ale
rotorului. Pentru rotor in scurtcircuit cu crestaturi drepte:
w2 = ½; kw2 = 1; m2 = Z2
si deci t.e.m. pe bara (faza) se poate calcula cu relatia:
U20 = E1 / (2 . w1. kw1) = kE . U1 / (2 . w1
. kw1)
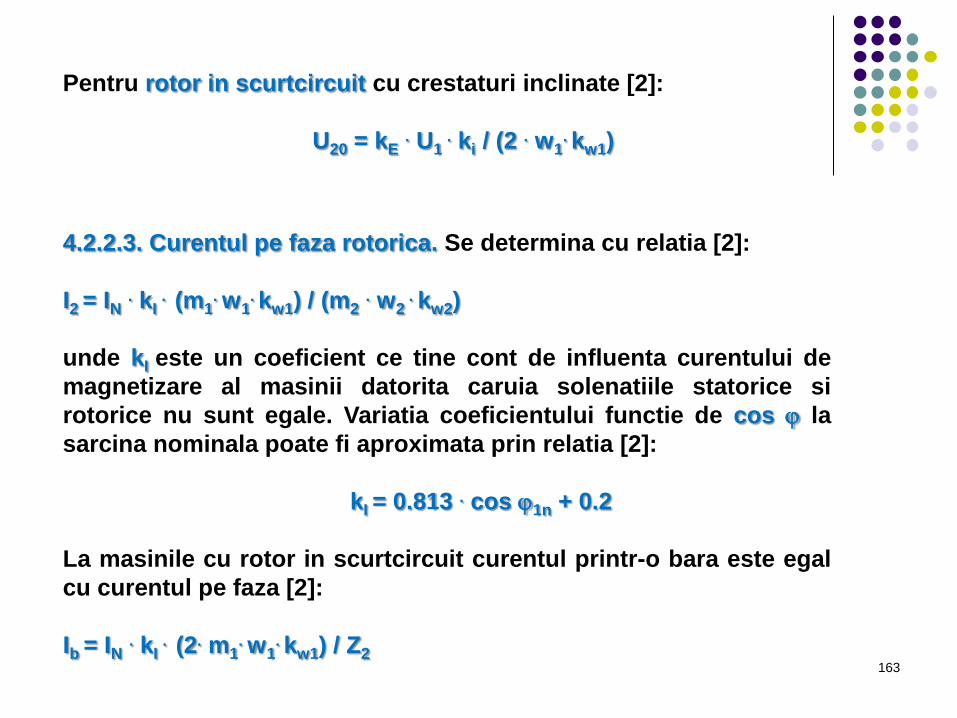
163
Pentru rotor in scurtcircuit cu crestaturi inclinate [2]:
U20 = kE . U1 . ki / (2 . w1
. kw1)
4.2.2.3. Curentul pe faza rotorica. Se determina cu relatia [2]:
I2 = IN . kI . (m1
. w1. kw1) / (m2
. w2 . kw2)
unde kI este un coeficient ce tine cont de influenta curentului de
magnetizare al masinii datorita caruia solenatiile statorice si
rotorice nu sunt egale. Variatia coeficientului functie de cos j la
sarcina nominala poate fi aproximata prin relatia [2]:
kI = 0.813 . cos j1n + 0.2
La masinile cu rotor in scurtcircuit curentul printr-o bara este egal
cu curentul pe faza [2]:
Ib = IN . kI . (2. m1
. w1. kw1) / Z2
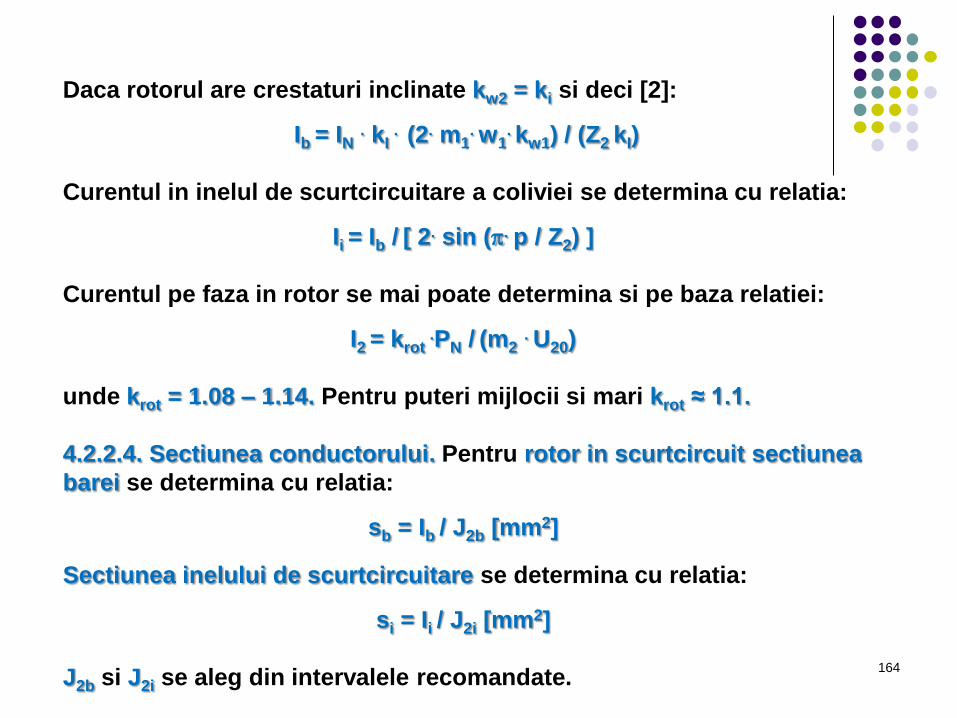
164
Daca rotorul are crestaturi inclinate kw2 = ki si deci [2]:
Ib = IN . kI . (2. m1
. w1. kw1) / (Z2 kI)
Curentul in inelul de scurtcircuitare a coliviei se determina cu relatia:
Ii = Ib / [ 2. sin (p. p / Z2) ]
Curentul pe faza in rotor se mai poate determina si pe baza relatiei:
I2 = krot .PN / (m2
. U20)
unde krot = 1.08 – 1.14. Pentru puteri mijlocii si mari krot ≈ 1.1.
4.2.2.4. Sectiunea conductorului. Pentru rotor in scurtcircuit sectiunea
barei se determina cu relatia:
sb = Ib / J2b [mm2]
Sectiunea inelului de scurtcircuitare se determina cu relatia:
si = Ii / J2i [mm2]
J2b si J2i se aleg din intervalele recomandate.
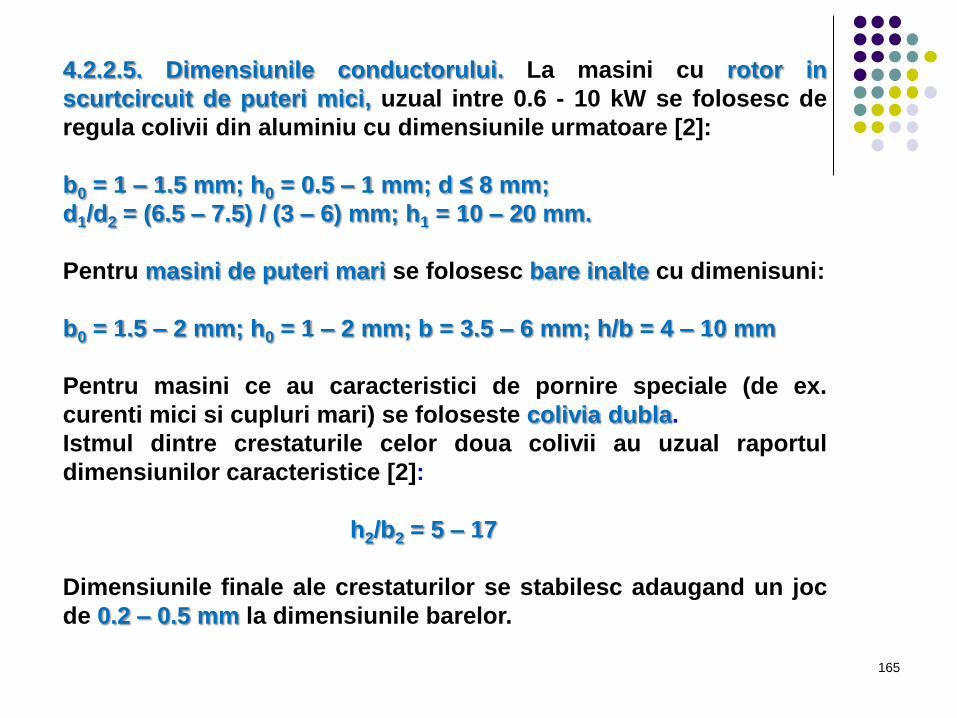
165
4.2.2.5. Dimensiunile conductorului. La masini cu rotor in
scurtcircuit de puteri mici, uzual intre 0.6 - 10 kW se folosesc de
regula colivii din aluminiu cu dimensiunile urmatoare [2]:
b0 = 1 – 1.5 mm; h0 = 0.5 – 1 mm; d ≤ 8 mm;
d1/d2 = (6.5 – 7.5) / (3 – 6) mm; h1 = 10 – 20 mm.
Pentru masini de puteri mari se folosesc bare inalte cu dimenisuni:
b0 = 1.5 – 2 mm; h0 = 1 – 2 mm; b = 3.5 – 6 mm; h/b = 4 – 10 mm
Pentru masini ce au caracteristici de pornire speciale (de ex.
curenti mici si cupluri mari) se foloseste colivia dubla.
Istmul dintre crestaturile celor doua colivii au uzual raportul
dimensiunilor caracteristice [2]:
h2/b2 = 5 – 17
Dimensiunile finale ale crestaturilor se stabilesc adaugand un joc
de 0.2 – 0.5 mm la dimensiunile barelor.

166
Tipuri de crestaturi rotorice
a) col. dubla b) col. simpla 1 c) col. simpla 2 d) col. simpla 2

167
4.2.3. Dimensionarea arborelui
Se considera ca motorul este cuplat direct cu mecanismul
antrenat. Cuplul nominal Mn al masinii se aproximeaza functie de
puterea nominala Pn si turatia de sincronism n1 cu relatia:
Mn ≈ 60. Pn /(2. p. n1)
Diametrul d0 minim al arborelui la capat de ax se calculeaza cu
relatia [2], [3]:
[cm]
unde:
tt – rezistenta admisibila la torsiune a materialului din care este
realizat arborele exprimata in daN/cm2.
k = 2 pentru masini normale de curent alternativ si curent
continuu;
k = 2,5 pentru motoare de curent alternativ utilizate la laminoare.
Daca ramane un spatiu relativ mare (peste 40...50 mm) intre ax si
jugul rotoric, atunci se prevad intre arbore si miezul magnetic
nervuri sudate de arbore sau se prevede un butuc.
ττ0.2
10kMd
2
n0
3

168
Rezistenta admisibila la torsiune - tt in daN/cm2
I II III
Oteluri de
rezistenta mica
600 400 200
1200 800 400
Oteluri de
rezistenta mare
900 600 300
1440 960 480
I – solicitare statica;
II – solicitare pulsatorie;
III – solicitare alternativa simetrica.
Diametrele arborelui in zonele de fixare a rulmentilor si a
miezului magnetic se calculeaza cu relatia:
d ≈ 1.1d0; dm ≈ (1.2 – 1.3).ks.d
unde d – diametrul in zona rulmentului ales din standarde,
valoarea imediat superioara;
dm – diametrul arborelui pe portiunea pe care se fixeaza
miezul magnetic rotoric;
ks – coeficient de siguranta care tine cont de solicitarile la
cuplu maxim, la cuplu de pornire, normalizari, etc.
169
4.2.4. Elaborarea modelului numeric de camp al masinii.
Verificari privind solicitarile electromagnetice
1. Se definesc parametrii asociati crestaturilor statorice si
rotorice si se initializeaza cu valori in limitele recomandate
sau care tin cont de SDV – urile existente
2. Se descriu geometriile 2D ale miezurilor stator si rotor
corespunzatoare unei sectiuni transversale prin masina
studiata tinand cont de eventuale simetrii
3. Se defineste tipul problemei de camp electromagnetic
4. Se definesc proprietatile de material ce intervin in studiu
5. Se definesc regiunile de tip suprafata ale domeniului de calcul
cu proprietati fizice distincte
6. Se defineste circuitul asociat problemei de camp
7. Se realizeaza asocierea fetelor domeniului de calcul cu
regiunile de tip suprafata
8. Se realizeaza asocierea regiunilor de tip suprafata cu
elementele de circuit
170
9. Se definesc parametrii elementelor de circuit
10. Se definesc regiunile lineice si conditiile pe frontierele
domeniului de calcul
11. Se construieste reteaua de discretizare in elemente finite
12. Se salveaza aplicatia pe calculator
13. Se rezolva problema de camp
14. Se exploateaza rezultatele numerice si se verifica solicitarile
electromagnetice.
15. Se reia studiul daca este cazul urmand pasii 1, 11, 12, 13, 14
pana cand rezultatele numerice se incadreaza in limitele
recomandate.
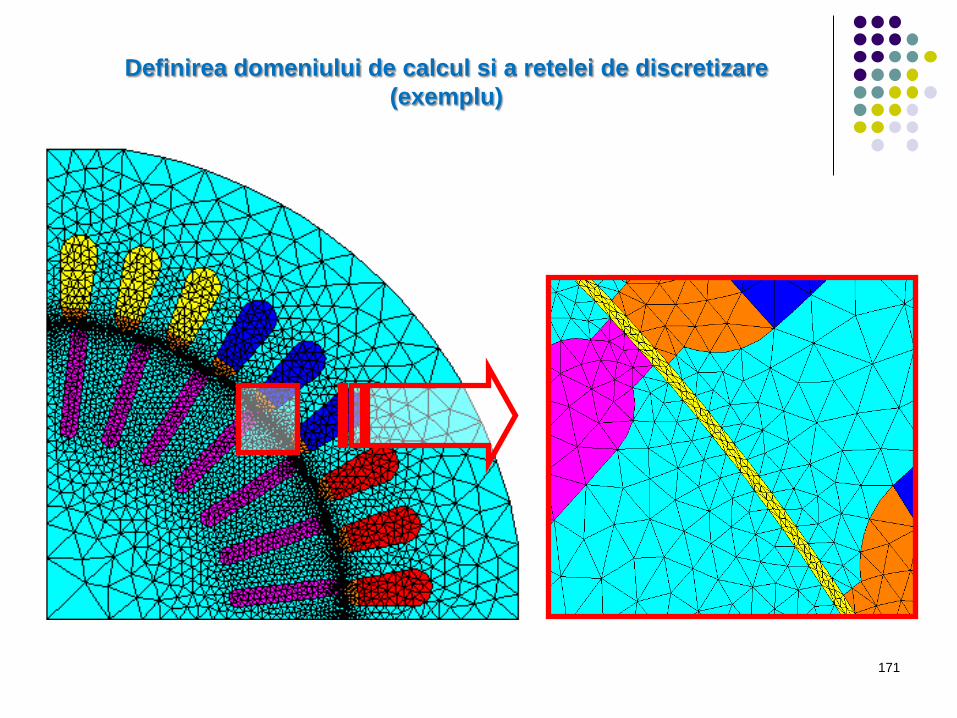
171
Definirea domeniului de calcul si a retelei de discretizare
(exemplu)

172
Definirea proprietatilor de material
Se definesc proprietatile de material pentru infasurarea
statorica, pentru colivie si pentru miezurile magnetice statoric si
rotoric.
Valorile rezistivitatilor asociate circuitelor rotoric si statoric
corespund materialelor aluminiu pentru colivii si cupru pentru
bobinaje la temperatura de 115C, adica rAl ≈ 5.07.10-8 Wm si
rCu ≈ 2.4.10-8 Wm.
Miezurile magnetice statoric si rotoric sunt construite din
pachete de tole caracterizate de o curba de magnetizare nelineara
cu o inductie la saturatie Bs si permeabilitate magnetica relativa
initiala mr date. Un exemplu de tola utilizata este cea de tip M600-
50A, caracterizata de Bs = 2 T, mr = 1000, cu pierderi specifice de
2.6 W/kg, la 1 T si 50 Hz, conform standard SR EN 10106:1995.
Arborele masinii se considera realizat din otel cu proprietati
magnetice.
Aerul din zona intrefierului are proprietatile vacuumului fiind un
material predefinit.

173
Circuitul asociat modelului de camp

174
Evaluarea parametrilor infasurarii statorice si ai coliviei
Rezistentele de faza ale infasurarii statorice se exprima prin:
Rf_U = Rf_V = Rf_W = Rcr + Rf
unde: Rcr reprezinta rezistenta corespunzatoare portiunilor din
infasurare situate in crestaturi, iar Rf, reprezinta rezistenta capetelor
frontale:
Se fac notatiile:
Lcapat - lungimea capetelor frontale ale bobinelor statorului,
r - rezistivitatea cuprului la temperatura de functionare,
LFe - lungimea axiala a miezului statoric,
w1 - numarul de spire pe faza,
a1 - numarul de conductoare in paralel pentru o faza a statorului,
dneiz- diametrul conductorului neizolat.
4
ρ2
neiz1
1Fecr
da
wL2R
p
4
da
wL2R
2
neiz1
1capat
f
p
ρ

175
Lungimea medie a unei spire se calculeaza cu relatia:
Lmedsp = 2 . (LFe + Lcapat)
Prin urmare rezistenta pe faza se calculeaza cu relatia:
4
ρ
4
ρ2
neiz1
1
2
neiz1
1capatFe
f_U,V,Wd
a
wL
da
wLL2R
p
p
medsp)(
Inductivitatea de dispersie a capetelor frontale se determina cu
relatia [2]:
Se fac notatiile:
D - diametrul interior al statorului exprimat in [mm],
p - numarul de perechi de poli,
m0 = 4p10-7 H/m permeabilitatea magnetica a vidului,
w1 - numarul de spire pe faza.
3
capat
2
10
f_U,V,W 10p
D0,64Lw0,67
p
6L
2
πμ
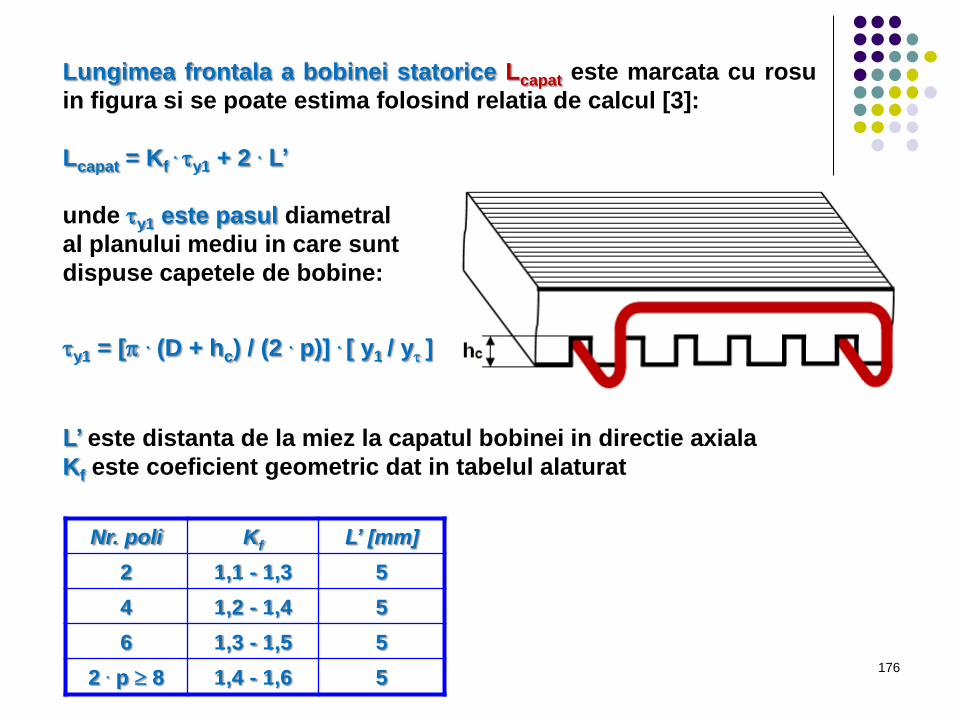
176
Lungimea frontala a bobinei statorice Lcapat este marcata cu rosu
in figura si se poate estima folosind relatia de calcul [3]:
Lcapat = Kf . ty1 + 2 . L’
unde ty1 este pasul diametral
al planului mediu in care sunt
dispuse capetele de bobine:
ty1 = [p . (D + hc) / (2 . p)] . [ y1 / yt ]
L’ este distanta de la miez la capatul bobinei in directie axiala
Kf este coeficient geometric dat in tabelul alaturat
Nr. poli Kf L’ [mm]
2 1,1 - 1,3 5
4 1,2 - 1,4 5
6 1,3 - 1,5 5
2 . p 8 1,4 - 1,6 5

177
Parametrii inelului de scurtcircuitare se determina cu relatia [2]:
Se fac notatiile:
Di - diametrul mediu al inelului de scurtcircuitare in [mm],
si - aria sectiunii transversale a inelului in [mm2].
Di si si se calculeaza cu relatiile:
unde:
D2 este diametrul exterior al rotorului,
Dcrestatura este diametrul cercului tangent la capatul inferior al
crestaturilor, iar a si b inaltimea, respectiv grosimea inelului.
2i
iπ
ρZs
DRik
3i
i
i 10b2a
b2D4.7log
pL
b2DZ0,058L
s
d
dm
2
2
0ik
2
2
i
crestaturaDDD
bas i
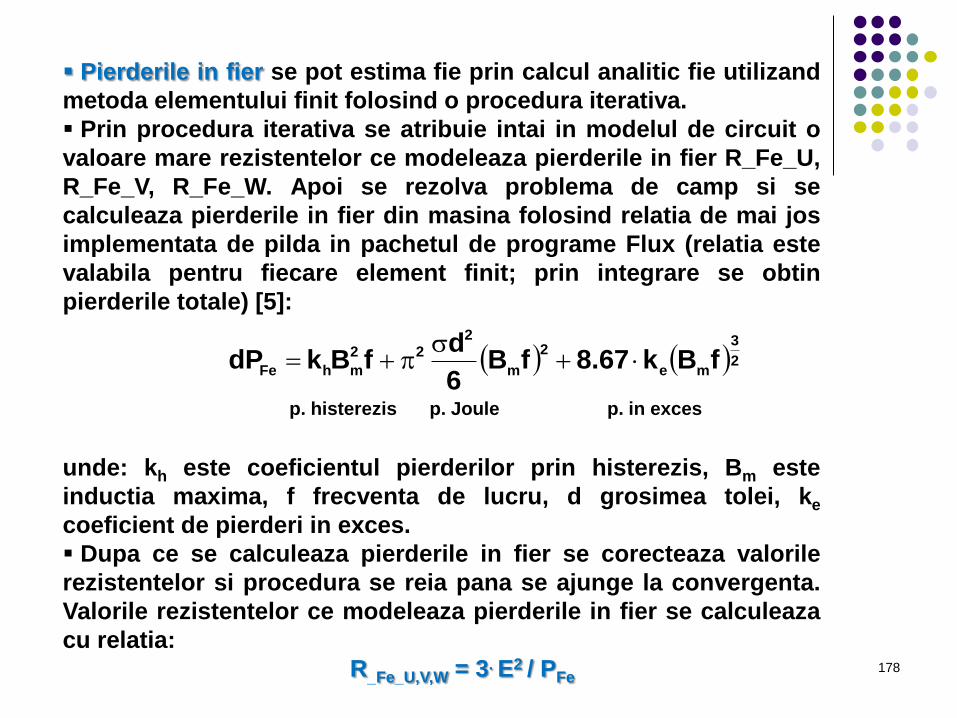
178
Pierderile in fier se pot estima fie prin calcul analitic fie utilizand
metoda elementului finit folosind o procedura iterativa.
Prin procedura iterativa se atribuie intai in modelul de circuit o
valoare mare rezistentelor ce modeleaza pierderile in fier R_Fe_U,
R_Fe_V, R_Fe_W. Apoi se rezolva problema de camp si se
calculeaza pierderile in fier din masina folosind relatia de mai jos
implementata de pilda in pachetul de programe Flux (relatia este
valabila pentru fiecare element finit; prin integrare se obtin
pierderile totale) [5]:
unde: kh este coeficientul pierderilor prin histerezis, Bm este
inductia maxima, f frecventa de lucru, d grosimea tolei, ke
coeficient de pierderi in exces.
Dupa ce se calculeaza pierderile in fier se corecteaza valorile
rezistentelor si procedura se reia pana se ajunge la convergenta.
Valorile rezistentelor ce modeleaza pierderile in fier se calculeaza
cu relatia:
R_Fe_U,V,W = 3. E2 / PFe
2
3
me
2
m
222
mhFe fBk8.67fB6
dfBkdP
sp
p. histerezis p. Joule p. in exces
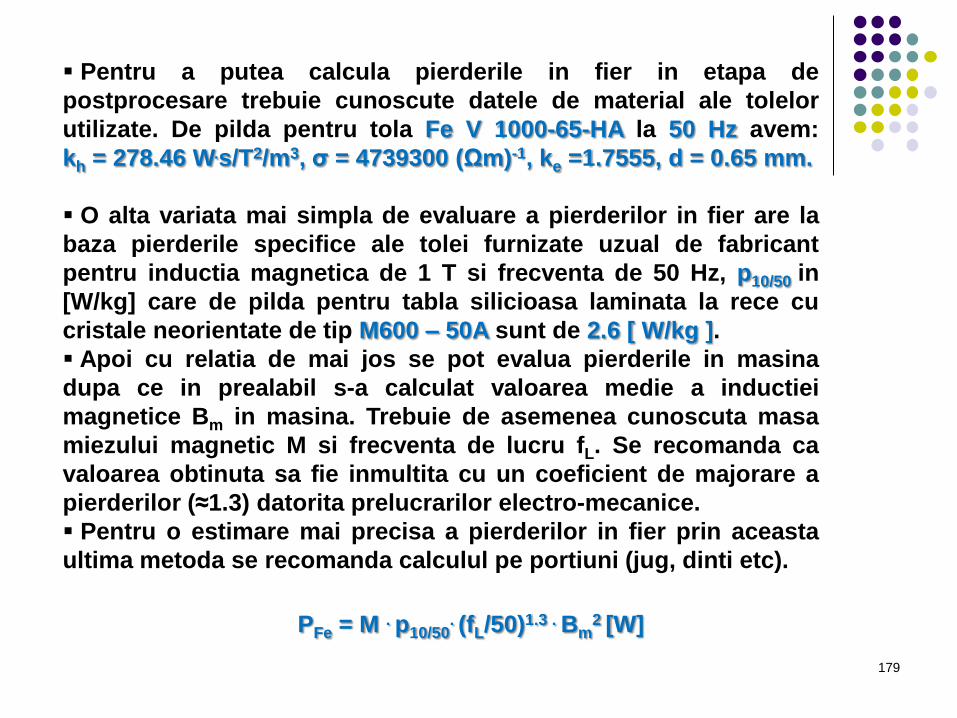
179
Pentru a putea calcula pierderile in fier in etapa de
postprocesare trebuie cunoscute datele de material ale tolelor
utilizate. De pilda pentru tola Fe V 1000-65-HA la 50 Hz avem:
kh = 278.46 W.s/T2/m3, σ = 4739300 (Ωm)-1, ke =1.7555, d = 0.65 mm.
O alta variata mai simpla de evaluare a pierderilor in fier are la
baza pierderile specifice ale tolei furnizate uzual de fabricant
pentru inductia magnetica de 1 T si frecventa de 50 Hz, p10/50 in
[W/kg] care de pilda pentru tabla silicioasa laminata la rece cu
cristale neorientate de tip M600 – 50A sunt de 2.6 [ W/kg ].
Apoi cu relatia de mai jos se pot evalua pierderile in masina
dupa ce in prealabil s-a calculat valoarea medie a inductiei
magnetice Bm in masina. Trebuie de asemenea cunoscuta masa
miezului magnetic M si frecventa de lucru fL. Se recomanda ca
valoarea obtinuta sa fie inmultita cu un coeficient de majorare a
pierderilor (≈1.3) datorita prelucrarilor electro-mecanice.
Pentru o estimare mai precisa a pierderilor in fier prin aceasta
ultima metoda se recomanda calculul pe portiuni (jug, dinti etc).
PFe = M . p10/50. (fL/50)1.3 . Bm
2 [W]

180
Pierderi mecanice de frecare si ventilatie
Pierderile de frecare si ventilatie fara pierderile din ventilator se
estimeaza cu relatia [2]:
Pfv = 0.65 . (n/1000)2 . (De/10)4 [W]
n este viteza [rot/min],
De este diametrul exterior al miezului statoric.
Pierderile in ventilator sunt [2]:
Pv = Q . H / v [ W ]
unde v este randamentul ventilatorului (0.15 – 0.25 pt. ventilator
axial; 0.35 – 0.45 pt. ventilator radial);
Q este debitul de aer care trece prin ventilator in m3/s [2]:
Q = (1 – ) . Pn / (1.1 . q) [m3/s]
este randamentul anticipat al masinii;
Pn este puterea nominala a masinii;
q este incalzirea aerului in interiorul masinii (<30 ºC clasa de iz. B;
< 40 ºC clasa de iz. F);
181
H este presiunea statica a ventilatorului in Pa [2]:
H = 1,1 . p . (u12 – u2
2) [ Pa ]
p este randamentul aerodinamic al ventilatorului;
u1 si u2 sunt vitezele periferice la exteriorul respectiv interiorul
ventilatorului [2]:
u1 = p. D1. n / 60; u2 = p. D2
. n / 60 [m/s]
D2 diametrul interior al ventilatorului;
D1 diametrul exterior al ventilatorului;
Se poate considera [2]:
D1 = De – (20 … 40) mm pt. masini cu 2p = 2 si 4
D1 = De pt. masini cu 2p > 4

182
-Caracteristica mecanica (motor 4 kW)
M = f(s) | f = fn = ct.; U1 = U1n = ct.
4.3. Determinarea caracteristicilor de functionare ale masinii
asincrone din solutia problemei de camp rezolvata cu MEF
0
10
20
30
40
50
60
0,0 0,2 0,4 0,6 0,8 1,0
s [u.r.]
M [
Nm
]
Sursa: [3]

183
-Caracteristica alunecarii (motor 4 kW)
s = f(P2) | f = fn = ct.; U1 = U1n = ct.
0,00
0,01
0,02
0,03
0,04
0,0 0,2 0,4 0,6 0,8 1,0
P2/P2n
s
Sursa: [3]

184
- Caracteristica curentului (motor 4 kW)
I1 = f(P2) | f = fn = ct.; U1 = U1n = ct.
0,0
2,0
4,0
6,0
8,0
10,0
0,00 0,20 0,40 0,60 0,80 1,00
P2/P2n
I1 [
A]
Sursa: [3]
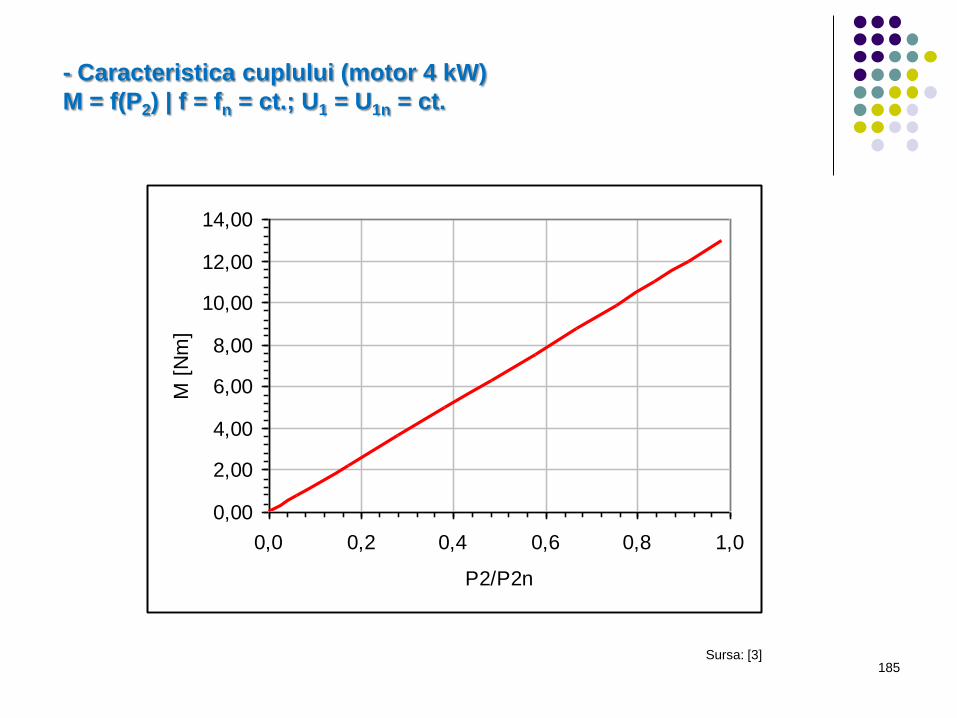
185
- Caracteristica cuplului (motor 4 kW)
M = f(P2) | f = fn = ct.; U1 = U1n = ct.
0,00
2,00
4,00
6,00
8,00
10,00
12,00
14,00
0,0 0,2 0,4 0,6 0,8 1,0
P2/P2n
M [
Nm
]
Sursa: [3]

186
Caracteristica randamentului
Randamentul masinii se calculeaza din probl. MEF:
100P
Pη
1
2
P1 = P2 + SP
P1 – puterea absorbita de masina,
P – puterea mecanica utila,
PFe – pierderile in fier,
PJ1 – pierderile Joule statorice,
PJ2 – pierderile Joule in colivia rotorica,
Pm,v – pierderi mecanice de frecare si ventilatie,
Ps – pierderi suplimentare,
Pe – puterea electromagnetica la nivelul intrefierului.
SP = PFe + PJ1 + PJ2 + Pm,v + Ps
Pe = PJ2 + Pm,v + Ps + P2

187
Pierderile in fier calculate anterior
PFe = 3. E2 / R_Fe_U,V,W
E este t.e.m. in infasurarea statorica,
R_Fe_U,V,W este rezistenta corespunzatoare pierderilor in fier.
Puterea electromagnetica
Pe = Me . W1
Me – cuplu electromagnetic,
W1 – turatia de sincronism.
Pierderile Joule statorice
PJ1 = 3 . R1f . I1f
2
R1f este rezistenta de faza statorica,
I1f este curentul de faza statoric.

188
Pierderile mecanice de frecare si ventilatie calculate anterior
Pmfv = Pfv + Pv
Pfv sunt pierderile de frecare si ventilatie,
Pv sunt pierderile din ventilator.
Pierderi suplimentare
Ps = 0,005 . Pn
Pn este puterea nominala a masinii.
Pierderile Joule rotorice
PJ2 = s . Pe
s este alunecarea,
Pe este puterea electromagnetica.
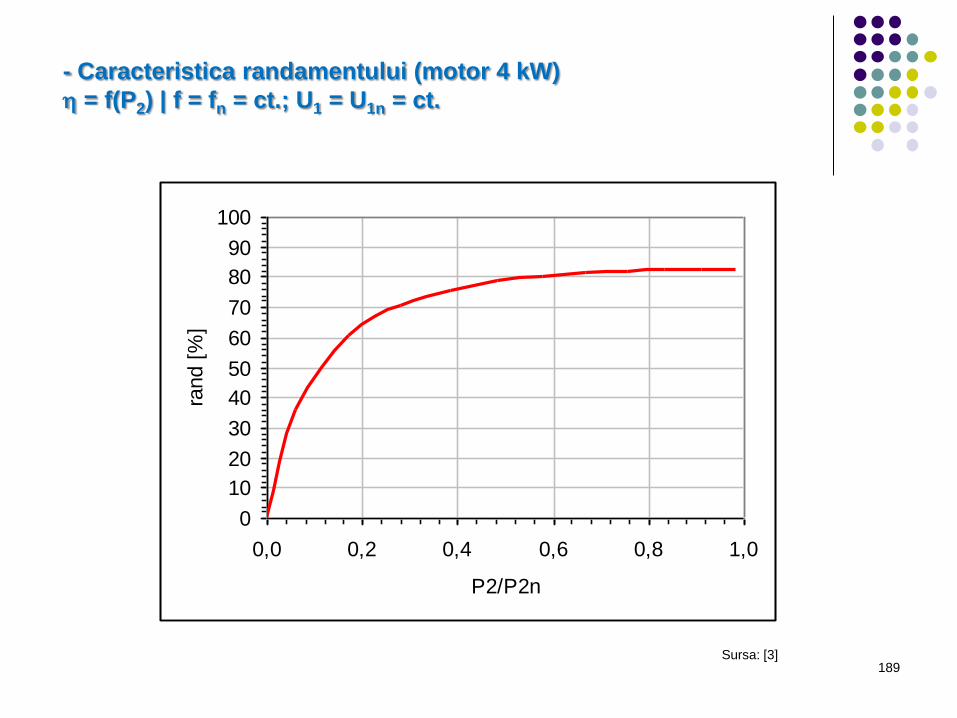
189
- Caracteristica randamentului (motor 4 kW)
= f(P2) | f = fn = ct.; U1 = U1n = ct.
0
10
20
30
40
50
60
70
80
90
100
0,0 0,2 0,4 0,6 0,8 1,0
P2/P2n
rand [
%]
Sursa: [3]
190
Functionarea masinii asincrone poate fi influentata semnificativ
de caracteristicile coliviei rotorice precum:
- Proprietatile materialului din care este turnata colivia (de ex.
inlocuind colivia din aluminiu cu una din cupru creste randamentul
masinii, scade alunecarea critica, scade cuplul de pornire, etc.);
- Geometria barelor rotorice;
- Geometria inelelor de scurtcircuitare.
Modificarea caracteristicilor coliviei rotorice afecteaza atat
rezistenta cat si reactanta echivalenta a circuitului rotoric, care la
randul lor influenteaza marimi precum: curentul absorbit, cuplul
mecanic, cuplul si curentul de pornire, alunecarea critica,
randamentul masinii, etc.
Aceste influente pot fi studiate eficient prin modelari numerice
succesive pentru diferite configuratii ale coliviei rotorice.
Prin postprocesarea marimilor de camp se pot obtine noile
caracteristici ale masinii si se pot formula concluzii importante.
4.4. Analiza influentei parametrilor coliviei rotorice asupra
functionarii optimale a masinii asincrone
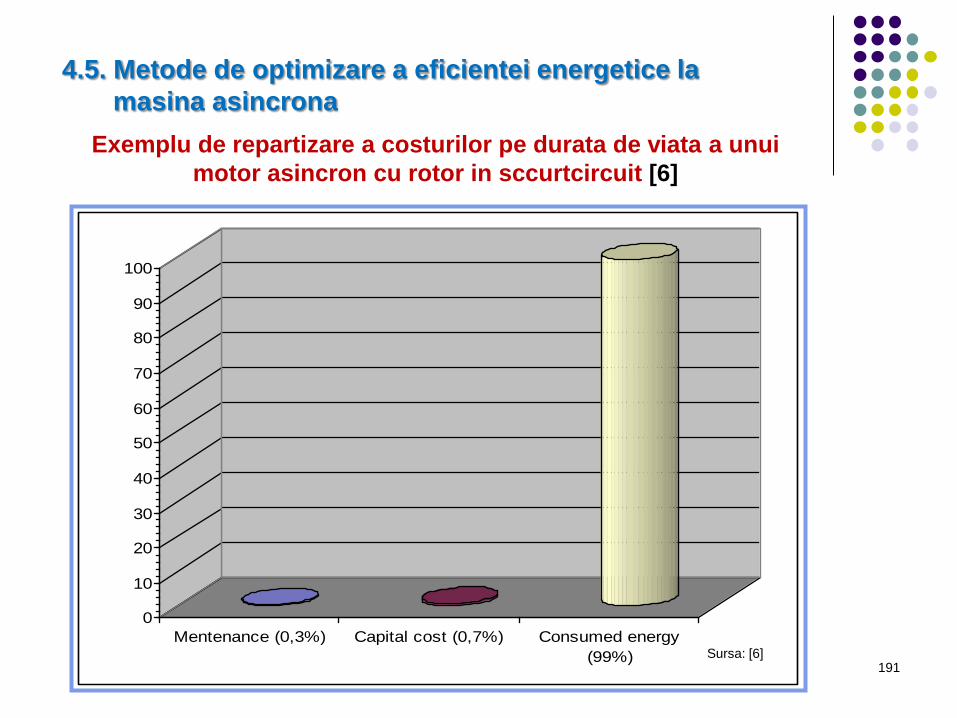
191
4.5. Metode de optimizare a eficientei energetice la
masina asincrona
Exemplu de repartizare a costurilor pe durata de viata a unui
motor asincron cu rotor in sccurtcircuit [6]
0
10
20
30
40
50
60
70
80
90
100
Mentenance (0,3%) Capital cost (0,7%) Consumed energy
(99%) Sursa: [6]
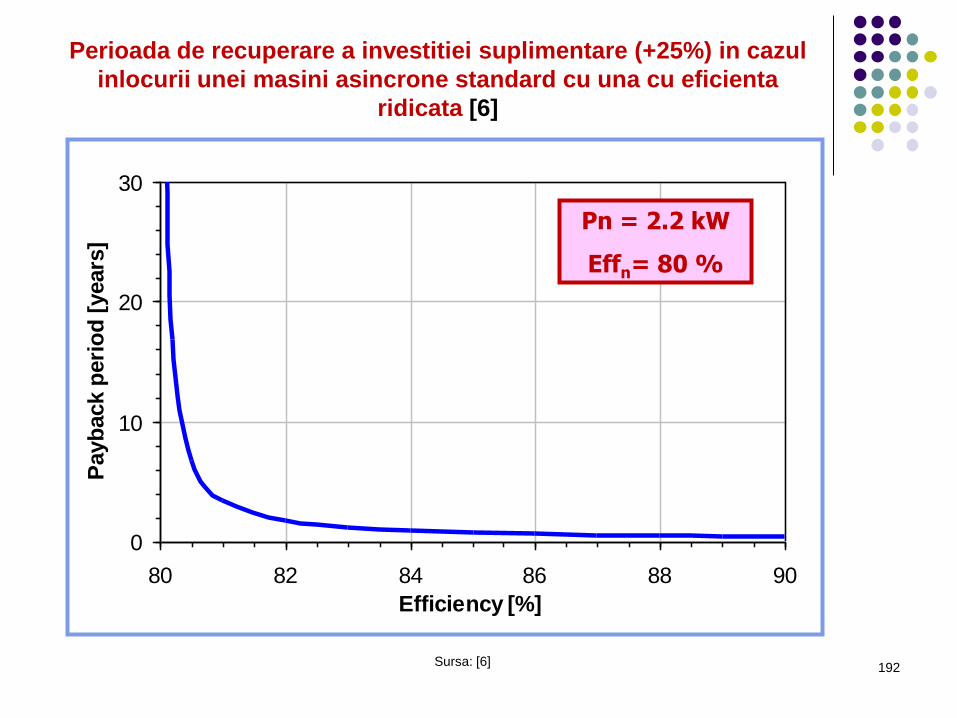
192
Perioada de recuperare a investitiei suplimentare (+25%) in cazul
inlocurii unei masini asincrone standard cu una cu eficienta
ridicata [6]
0
10
20
30
80 82 84 86 88 90
Efficiency [%]
Payb
ack p
eri
od
[years
]
Pn = 2.2 kW
Effn= 80 %
Sursa: [6]

193
4.5.1. Tendinte privind promovarea masinilor electrice cu
eficienta energetica ridicata
CEI 60034-30, “Rotating electrical machines – Part 30: Efficiency
classes of single-speed, three-phase, cage-induction motors
(IE-code)”, 2008.
Sursa: [6]

194
CEI 60034-30, “Rotating electrical machines – Part 30: Efficiency
classes of single-speed, three-phase, cage-induction motors
(IE-code)”, 2008.
IEC Energy
Efficiency Classes
IEC Code EFF Code NEMA
Super Premium
Efficiency
IE4
Premium
Efficiency
IE3 NEMA
Premium
High Efficiency IE2 EFF1 EPAct
Standard
Efficiency
IE1 EFF2
Below Standard
Efficiency
- EFF3
NEMA = Asociatia constructorilor de echipamente electrice si de
imagistica medicala (SUA)
EPAct = Energy Policy Act (SUA)

195
Motoare asincrone trifazate, IP 54 – IP 55, putere nominala in gama
1.1 – 90 kW, 2 sau 4 poli, tensiune nominala 400 V, 50 Hz, Serviciul
S1, proiectare standard cf. EN 60034-12.
CEMEP = Comitetul european al constructorilor de masini si
electrice si electronica de putere
Sursa: http://ec.europa.eu/energy/efficiency/consultations/doc/
2008_02_22_labelling/2008_consultation_energy_labelling_appendix2.pdf
EFF1: Motor cu randam. ridicat
EFF2: Motor cu randam. imbunatatit
EFF3: Motor standard

196
4.5.2. Masuri specifice ce permit cresterea randamentului
masinii asincrone
- Inlocuirea coliviilor turnate din aluminiu cu unele din cupru;
- Reproiectarea geometriei barelor rotorice si ale inelelor de
scurtcircuitare ale masinii;
- Utilizarea unor materiale magnetice cu proprietati superioare
(tole cu pierderi specifice reduse etc.).
- Reconsiderarea lungimii pachetului de tole si a structurii
infasurarii statorice.
- Etc.
Analiza acestor masuri propuse poate fi efectuata eficient prin
modelare numerica utilizand MEF.

197
4.5.2.1. Inlocuirea coliviilor turnate din aluminiu cu unele din
cupru
Turnarea coliviilor din cupru la motoarele asincrone este o
tehnologie foarte recenta si promitatoare [6].
La sfarsitul anului 2006 Siemens Energy & Automation (SUA) a
lansat pe piata o linie tehnologica de turnare a coliviilor din cupru.
Datorita rezistivitatii electrice mai reduse a cuprului in raport cu
aluminiul, masinile echipate cu colivii din cupru prezinta pierderi
Joule rotorice cu circa 40-50% mai reduse decat masinile clasice
cu colivii din aluminiu.
Prin simpla inlocuire a coliviei din aluminiu cu una din cupru se
poate obtine o masina asincrona cu eficienta energetica sporita si
cu putere nominala superioara [6].

198
- Pentru o putere nominala data, masina asincrona echipata cu
colivie din cupru, comparativ cu una clasica (colivie din aluminiu)
are dimensiuni mai reduse, caracteristica esentiala pentru
anumite aplicatii industriale, cum ar fi sistemele de transport,
turbinele eoliene etc. [6]
- Motoarele asincrone existente echipate cu colivie din cupru sunt
reduse ca numar fiind de regula de puteri mari. Constructia
coliviilor la aceste motoare se face in general manual, prin
sudare, rezultand costuri importante de fabricatie.
- Motoarele echipate cu colivie din aluminiu sunt raspandite pe
scara larga pentru puteri mici si medii, deoarece turnarea sub
presiune a coliviilor din aluminiu este o tehnologie eficienta,
economica si accesibila.
-Problema critica la turnarea sub presiune a coliviior din cupru
este legata de materialul din care sunt construite matritele.
Matritele din otel utilizate la turnarea coliviilor din aluminiu sunt
inadecvate pentru turnarea cuprului, caracterizat de o
temperatura de topire mult mai ridicata (circa 1083 ºC) fata de
aluminiu (circa 660 ºC).
199
- In urma studiilor recente intreprinse in SUA au fost identificate
materiale rezistente la socuri termice si temperaturi inalte, ce pot
fi utilizate la fabricarea matritelor pentru turnarea coliviilor din
cupru, care sa reziste la un numar cat mai ridicat de cicluri de
turnare. Este vorba de metale si aliaje refractare pe baza de
nichel, tungsten, molibden, beriliu, etc.
- Tehnologia de turnare a coliviilor din cupru poate oferi avantaje
atat pentru producatorii de motoare cat si pentru utilizatori, dupa
cum urmeaza:
- imbunatatirea randamentului motorului cu pana la cateva
procente,
- reducerea costurilor de fabricatie cu pana la peste 10%,
- reducerea masei motorului cu pana la 10%.
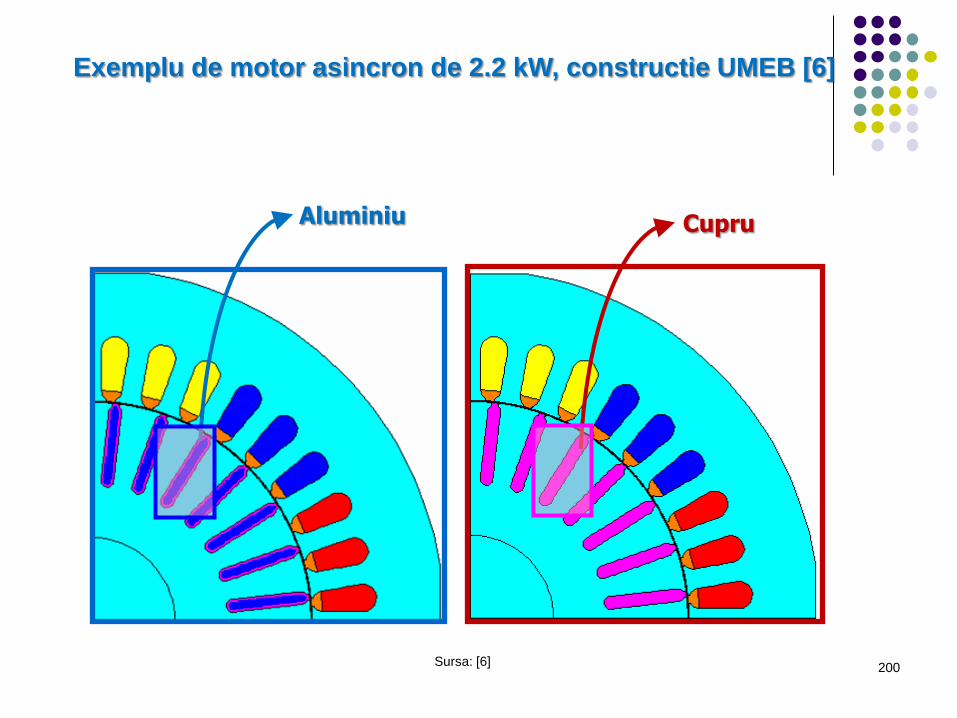
200
Exemplu de motor asincron de 2.2 kW, constructie UMEB [6]
Cupru Aluminiu
Sursa: [6]

201
0
10
20
30
40
50
0.0 0.2 0.4 0.6 0.8 1.0
Slip
To
rqu
e [
Nm
]
AL
CO
-20%
-50%
Caracteristica Cuplu – Alunecare, M = f(s) [6]
Sursa: [6]
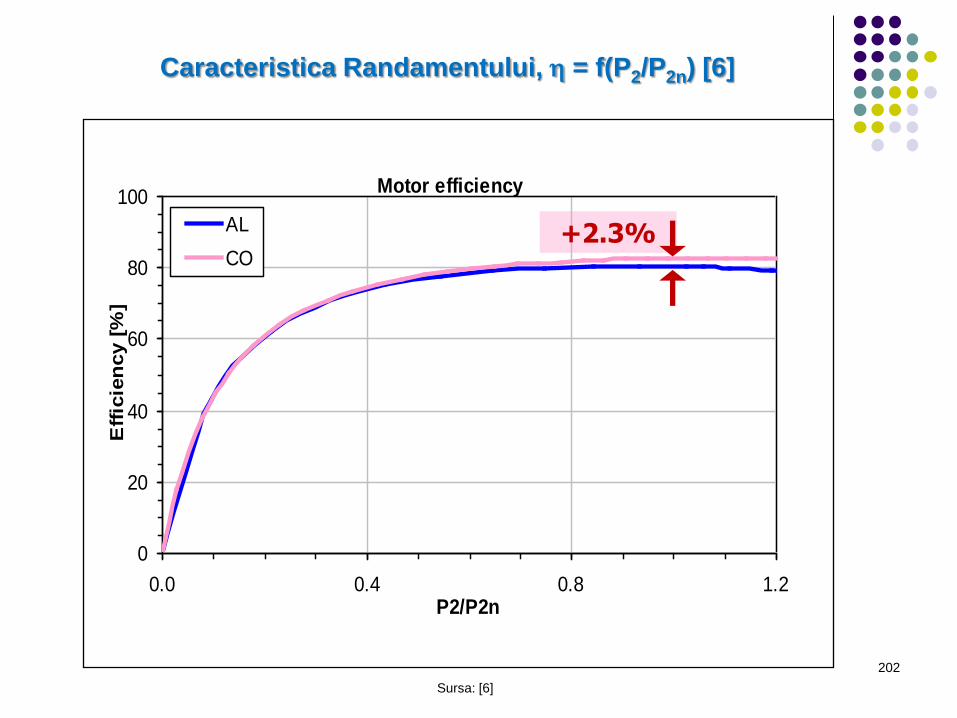
202
Caracteristica Randamentului, = f(P2/P2n) [6]
Motor efficiency
0
20
40
60
80
100
0.0 0.4 0.8 1.2P2/P2n
Eff
icie
ncy [
%]
AL
CO+2.3%
Sursa: [6]
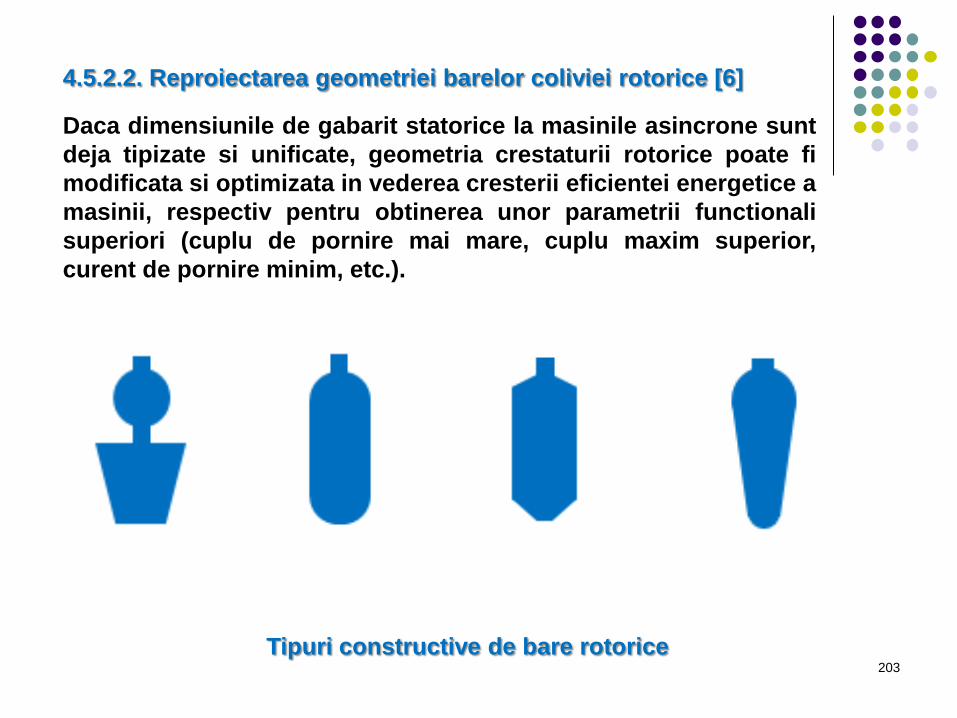
203
4.5.2.2. Reproiectarea geometriei barelor coliviei rotorice [6]
Daca dimensiunile de gabarit statorice la masinile asincrone sunt
deja tipizate si unificate, geometria crestaturii rotorice poate fi
modificata si optimizata in vederea cresterii eficientei energetice a
masinii, respectiv pentru obtinerea unor parametrii functionali
superiori (cuplu de pornire mai mare, cuplu maxim superior,
curent de pornire minim, etc.).
Tipuri constructive de bare rotorice

204
Exemplu de motor asincron de 2.2 kW, constructie UMEB [6]
Aluminiu Cupru Bara reproiectata
Sursa: [6]

205
Caracteristica Cuplu – Alunecare, M = f(s) [6]
0
10
20
30
40
50
0.0 0.2 0.4 0.6 0.8 1.0
Slip
To
rqu
e [
Nm
]
AL
CO redesigned
-0.2%
Sursa: [6]
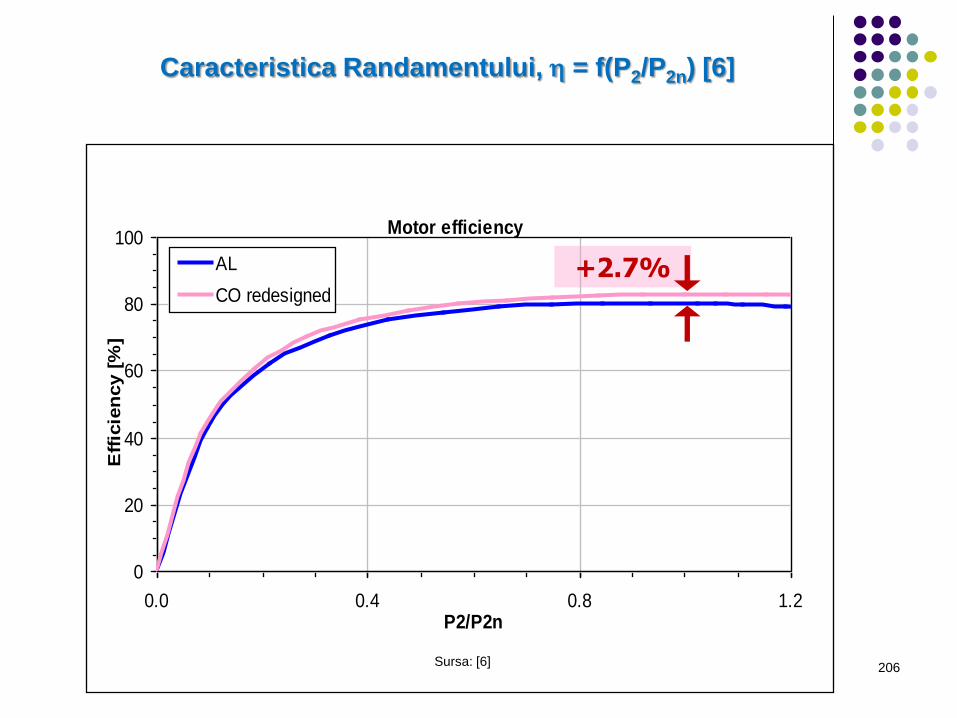
206
Caracteristica Randamentului, = f(P2/P2n) [6]
Motor efficiency
0
20
40
60
80
100
0.0 0.4 0.8 1.2P2/P2n
Eff
icie
ncy [
%]
AL
CO redesigned
+2.7%
Sursa: [6]
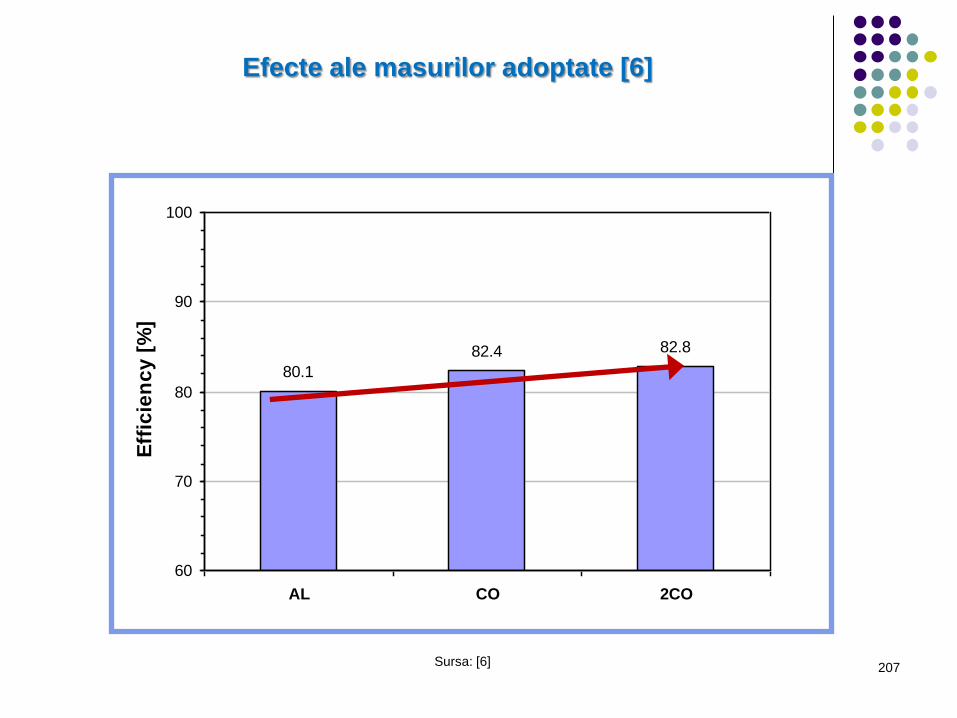
207
Efecte ale masurilor adoptate [6]
80.1
82.4 82.8
60
70
80
90
100
AL CO 2CO
Eff
icie
nc
y [
%]
Sursa: [6]

208
4.5.2.3. Utilizarea unor tole cu pierderi specifice reduse [6]
Daca vom considera tole cu aceeasi caracteristica de magnetizare
dar cu pierderi specifice de doua ori mai reduse se obtine o masina
cu randament superior.
2CO = motor cu dubla
colivie din cupru si tole
normale
2CO-HS = motor cu
dubla colivie din cupru
si tole cu pierderi
specifice reduse
Motor asincron de 2.2 kW
Sursa: [6]

209
Bibliografie
[1] Paul WaIde and Conrad U. Brunner: “Energy-Efficiency Policy
Opportunities for Electric Motor-Driven Systems”, Energy Efficiency
Series, International Energy Agency (http://www.iea.org/).
[2] Cioc I, Nica C: Proiectarea masinilor electrice, EDP, Bucuresti, 1994.
[3] Parlog RC, Galan N, Vasile N, Soran IF, Mihalache M, Melcescu L.
Tudorache T, Gheorghe S, Serban D: Serie de motoare asincrone cu
rotorul în scurtcircuit în construcţie capsulare antideflagrantă cu turaţie
reglabilă în limite largi, Proiect cercetare, Contract nr. 4/18.09.2007/
MAEXTR, Program Inovare.
[4] Ciuprina G., Ioan D., Munteanu I., Rebican M., Popa R.:
“Optimizarea numerica a dispozitivelor electromagnetice”, Ed. Printech,
Bucuresti, 2002.
[5] ***: Flux Users Guide.
[6] Tudorache T, Melcescu L: FEM Optimal Design of Energy Efficient
Induction Machines, AECE Journal, 2009.
[7] http://commons.wikimedia.org
[8] http://www.electroputere.ro
[9] http://www.umeb.ro
Recommended

















