
Real-time Wall Outline Extraction for Redirected WalkingChristian Hirt
ETH ZurichLeonhardstrasse 21
8092 Zurich, [email protected]
Markus ZankETH Zurich
Leonhardstrasse 218092 Zurich, Switzerland
Andreas KunzETH Zurich
Leonhardstrasse 218092 Zurich, [email protected]
ABSTRACTExisting redirected walking applications use accurate tracking sys-tems to determine the position and orientation of the user withina designated tracking space. In order to plan redirection and toensure the user’s safety, it is necessary to define the walking areain advance. However, when using ad hoc redirected walking, thisis not possible, because the user’s surroundings are not knownbeforehand.
This paper introduces an approach to reconstruct the geometryof the available walking area as an outline representing the wallsand similar structures. The outline is generated in real-time usinga commercial SLAM tracking device and will be used for a wallwarner safety mechanism and a redirection planner.
CCS CONCEPTS• Computing methodologies→ Tracking; Virtual reality;
KEYWORDSRedirected Walking, Virtual Reality, Area TrackingACM Reference format:Christian Hirt, Markus Zank, and Andreas Kunz. 2017. Real-time WallOutline Extraction for Redirected Walking. In Proceedings of VRST ’17: 23rdACM Symposium on Virtual Reality Software and Technology, Gothenburg,Sweden, November 8–10, 2017 (VRST ’17), 2 pages.https://doi.org/10.1145/3139131.3143416
1 INTRODUCTION[Razzaque et al. 2001] introduced redirected walking to allow theexploration of a large virtual environment in a smaller physicalspace. In order to achieve an immersive virtual experience, theuser’s walking trajectory can be manipulated imperceptibly usingso-called redirection techniques. Redirected walking systems relyon tracking systems that provide the user’s position and orientationin the physical space to plan redirection and to guarantee the safetyof the user during run-time. So far, the geometry of the physicalspace boundaries was entered manually into the system based onthe setup of the tracking system. The drawback of this trackingmethod is the necessary preparation of the real environment (set up,calibration, etc.). Thus, [Nescher et al. 2016] proposed an approach
Permission to make digital or hard copies of part or all of this work for personal orclassroom use is granted without fee provided that copies are not made or distributedfor profit or commercial advantage and that copies bear this notice and the full citationon the first page. Copyrights for third-party components of this work must be honored.For all other uses, contact the owner/author(s).VRST ’17, November 8–10, 2017, Gothenburg, Sweden© 2017 Copyright held by the owner/author(s).ACM ISBN 978-1-4503-5548-3/17/11.https://doi.org/10.1145/3139131.3143416
featuring ad hoc free walking using a SLAM (Simultaneous Local-ization and Mapping) implementation to simultaneously track theuser’s position and to collect information about the surroundings,which eliminates any preparation of the room before using thesystem. In their approach, SLAM was proposed for tracking andobstacle detection, while a method for instantaneous map genera-tion was missing. This paper thus introduces an algorithm for a 2Dmap generation suitable for redirected walking based on a pointcloud recorded by a depth sensing system.
2 RELATEDWORKRedirected walking can be achieved by various approaches. Fre-quently, static redirection techniques such as steer-to-center [Pecket al. 2012] are applied. For selecting the optimal redirection tech-nique for the user’s current situation, a model predictive controllerwas introduced by [Nescher et al. 2014]. It selects the most suit-able redirection technique based on the results of a step-wise finitehorizon optimal control problem. Another control and path plan-ning algorithm, FORCE, was presented by [Zmuda et al. 2013]. Ituses a probabilistic prediction of the user’s path in a known virtualenvironment.
A possible approach for a safety measure is the multi-phasewall warner system presented by [Zank et al. 2017]. This systemoverlays the virtual environment with a model of the physicalspace boundaries if the user approaches them to inform him abouta potential collision.
All path planning algorithms and safety measures depend on anaccurate representation of the physical space in order to preventcollisions. However, if this is not known beforehand, there existsno suitable approach providing the necessary representation of thephysical space in real-time.
3 MAP GENERATIONSLAM algorithms store information about the environment in mapfiles to which the localization algorithm can refer. However, theformat is optimized for future localization calculations and is notsuitable for real-time redirected walking. The task is therefore tofind an easily accessible yet accurate ad hoc representation of thesurrounding’s outline, which can then be fed into existing redirectedwalking systems.
As proposed in Nescher’s ad hoc free walking approach, Google’sTango tablet1 is attached to a head-mounted display and is usedto track the user’s movement using SLAM. Among other sensors,the Tango features a depth sensing camera which is part of theSLAM implementation. The camera’s underlying algorithm incor-porates a time-of-flight analysis and provides a 3D depth point
1https://developers.google.com/tango/
VRST ’17, November 8–10, 2017, Gothenburg, Sweden C. Hirt and M. Zank and A. Kunz
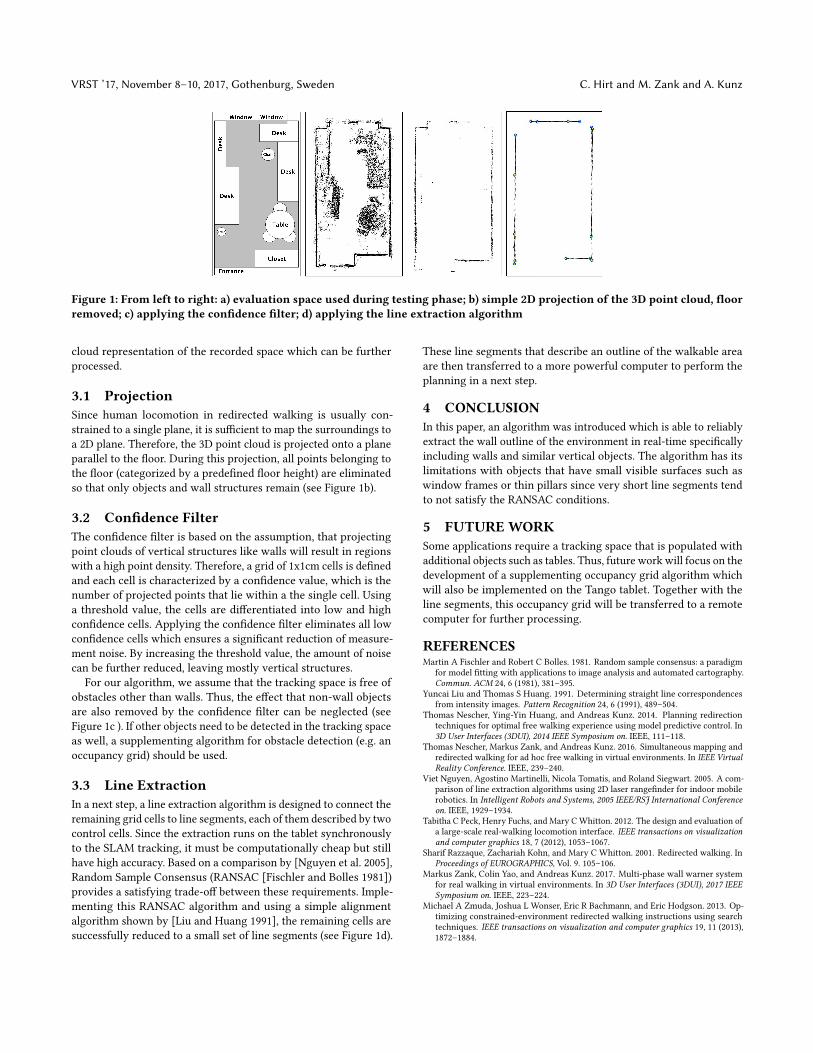
Figure 1: From left to right: a) evaluation space used during testing phase; b) simple 2D projection of the 3D point cloud, floorremoved; c) applying the confidence filter; d) applying the line extraction algorithm
cloud representation of the recorded space which can be furtherprocessed.
3.1 ProjectionSince human locomotion in redirected walking is usually con-strained to a single plane, it is sufficient to map the surroundings toa 2D plane. Therefore, the 3D point cloud is projected onto a planeparallel to the floor. During this projection, all points belonging tothe floor (categorized by a predefined floor height) are eliminatedso that only objects and wall structures remain (see Figure 1b).
3.2 Confidence FilterThe confidence filter is based on the assumption, that projectingpoint clouds of vertical structures like walls will result in regionswith a high point density. Therefore, a grid of 1x1cm cells is definedand each cell is characterized by a confidence value, which is thenumber of projected points that lie within a the single cell. Usinga threshold value, the cells are differentiated into low and highconfidence cells. Applying the confidence filter eliminates all lowconfidence cells which ensures a significant reduction of measure-ment noise. By increasing the threshold value, the amount of noisecan be further reduced, leaving mostly vertical structures.
For our algorithm, we assume that the tracking space is free ofobstacles other than walls. Thus, the effect that non-wall objectsare also removed by the confidence filter can be neglected (seeFigure 1c ). If other objects need to be detected in the tracking spaceas well, a supplementing algorithm for obstacle detection (e.g. anoccupancy grid) should be used.
3.3 Line ExtractionIn a next step, a line extraction algorithm is designed to connect theremaining grid cells to line segments, each of them described by twocontrol cells. Since the extraction runs on the tablet synchronouslyto the SLAM tracking, it must be computationally cheap but stillhave high accuracy. Based on a comparison by [Nguyen et al. 2005],Random Sample Consensus (RANSAC [Fischler and Bolles 1981])provides a satisfying trade-off between these requirements. Imple-menting this RANSAC algorithm and using a simple alignmentalgorithm shown by [Liu and Huang 1991], the remaining cells aresuccessfully reduced to a small set of line segments (see Figure 1d).
These line segments that describe an outline of the walkable areaare then transferred to a more powerful computer to perform theplanning in a next step.
4 CONCLUSIONIn this paper, an algorithm was introduced which is able to reliablyextract the wall outline of the environment in real-time specificallyincluding walls and similar vertical objects. The algorithm has itslimitations with objects that have small visible surfaces such aswindow frames or thin pillars since very short line segments tendto not satisfy the RANSAC conditions.
5 FUTUREWORKSome applications require a tracking space that is populated withadditional objects such as tables. Thus, future work will focus on thedevelopment of a supplementing occupancy grid algorithm whichwill also be implemented on the Tango tablet. Together with theline segments, this occupancy grid will be transferred to a remotecomputer for further processing.
REFERENCESMartin A Fischler and Robert C Bolles. 1981. Random sample consensus: a paradigm
for model fitting with applications to image analysis and automated cartography.Commun. ACM 24, 6 (1981), 381–395.
Yuncai Liu and Thomas S Huang. 1991. Determining straight line correspondencesfrom intensity images. Pattern Recognition 24, 6 (1991), 489–504.
Thomas Nescher, Ying-Yin Huang, and Andreas Kunz. 2014. Planning redirectiontechniques for optimal free walking experience using model predictive control. In3D User Interfaces (3DUI), 2014 IEEE Symposium on. IEEE, 111–118.
Thomas Nescher, Markus Zank, and Andreas Kunz. 2016. Simultaneous mapping andredirected walking for ad hoc free walking in virtual environments. In IEEE VirtualReality Conference. IEEE, 239–240.
Viet Nguyen, Agostino Martinelli, Nicola Tomatis, and Roland Siegwart. 2005. A com-parison of line extraction algorithms using 2D laser rangefinder for indoor mobilerobotics. In Intelligent Robots and Systems, 2005 IEEE/RSJ International Conferenceon. IEEE, 1929–1934.
Tabitha C Peck, Henry Fuchs, and Mary CWhitton. 2012. The design and evaluation ofa large-scale real-walking locomotion interface. IEEE transactions on visualizationand computer graphics 18, 7 (2012), 1053–1067.
Sharif Razzaque, Zachariah Kohn, and Mary C Whitton. 2001. Redirected walking. InProceedings of EUROGRAPHICS, Vol. 9. 105–106.
Markus Zank, Colin Yao, and Andreas Kunz. 2017. Multi-phase wall warner systemfor real walking in virtual environments. In 3D User Interfaces (3DUI), 2017 IEEESymposium on. IEEE, 223–224.
Michael A Zmuda, Joshua L Wonser, Eric R Bachmann, and Eric Hodgson. 2013. Op-timizing constrained-environment redirected walking instructions using searchtechniques. IEEE transactions on visualization and computer graphics 19, 11 (2013),1872–1884.
Recommended

















