PONDEROMOTIVE INSTABILITIES, MICROPHONICS, and RF CONTROL
Jean Delayen
Thomas Jefferson National Accelerator FacilityOld Dominion University
USPAS June 2008 U. Maryland

Frequency Control
Energy gain
Energy gain error
The fluctuations in cavity field amplitude and phase come mostly from the fluctuations in cavity frequency
Need for fast frequency control
Minimization of rf power requires matching of average cavity frequency to reference frequency
Need for slow frequency tuners
cosW qV f=
tanW VW Vd d df f= -

Some Definitions
• Ponderomotive effects: changes in frequency caused by the electromagnetic field (radiation pressure)– Static Lorentz detuning (cw operation)– Dynamic Lorentz detuning (pulsed operation)
• Microphonics: changes in frequency caused by connections to the external world– Vibrations– Pressure fluctuations
Note: The two are not completely independent.When phase and amplitude feedbacks are active, ponderomotiveeffects can change the response to external disturbances

Equivalent Circuit for a Cavity with Beam
• Beam in the rf cavity is represented by a current generator. • Equivalent circuit:
(1 )sh
LR
Rb
=+
0
0
tan -21
produces with phase (detuning angle)
produces with phase
b b
g g
c g b
i V
i V
V V V
Q
yy
wyb w
= -
D=
+

Equivalent Circuit for a Cavity with Beam
1/21/2
0
0
2( ) cos1
cos2(1 )
sin22
2: beam rf current: beam dc current: beam bunch length
g g sh
b shb
b
bb
b
b
V P R
i RV
i i
ii
b yb
ybq
q
q
=+
=+
=

Equivalent Circuit for a Cavity with Beam
( ) [ ]{ }2
2 211 (1 ) tan tan
4c
gsh
VP b b
Rb b y f
b= + + + + -
0 cosPower absorbed by the beam = Power dissipated in the cavity
sh
c
R ib
Vf
=
2
(1 ) tan tan
1
1 (1 )2
opt opt
opt
opt cg
sh
b
b
b bVP
R
b y f
b
+ =
= +
+ + +=
Minimize Pg :

Cavity with Beam and Microphonics
• The detuning is now 0 0
0 0
0
0tan 2 tan 2
where is the static detuning (controllable)
and is the random dynamic detuning (uncontrollable)
mL L
m
Q Qdw dw dw
y yw w
dwdw
±= - = -

Qext Optimization with Microphonics
22
00
222
00
( 1) 2
( 1) ( 1) 22
mopt
opt c mg
sh
b Q
VP b b QR
dwbw
dww
Ê ˆ= + + Á ˜Ë ¯
È ˘Ê ˆÍ ˙= + + + + Á ˜Í ˙Ë ¯Î ˚
Condition for optimum coupling:
and
In the absence of beam (b=0):
and
2
00
22
00
1 2
1 1 22
If is very large
mopt
opt c mg
sh
m m
Q
VP QR
U
dwbw
dww
dw dw
Ê ˆ= + Á ˜Ë ¯
È ˘Ê ˆÍ ˙= + + Á ˜Í ˙Ë ¯Î ˚

Example

Example

Lorentz DetuningPressure deforms the cavity wall:
Outward pressure at the equator
Inward pressure at the iris
2 20 0
2
4
RF power produces radiation pressure:
Deformation produces a frequency shift:
L acc
H EP
f k E
m e-=
D = -

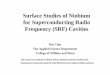
Lorentz Detuning
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-1,000 -800 -600 -400 -200 0 200
Detuning (Hz)
Ener
gy C
onte
nt (N
orm
aliz
ed)
CEBAF 6 GeV
CEBAF Upgrade

Microphonics
• Total detuning
0
0
where is the static detuning (controllable)
and is the random dynamic detuning (uncontrollable)m
m
dwdw
dw dw+

Ponderomotive Effects• Adiabatic theorem applied to harmonic oscillators (Boltzmann-
Ehrenfest)
2
/
2 20 0
1 1
( )
( ) (4 4
If = , then is an adiabatic invariant to all orders
(Slater)
Quantum mechanical picture: the number of photons is constant:
d
VV
d Udt
UU U o eU
U N
U d H r E
e
wew w
ww w w
w
m e
- D DÊ ˆ Ê ˆD fi =Á ˜ Á ˜Ë ¯ Ë ¯
=
= +Ú
∼
2 20 0
)
( ) ( ) ( ) ( )4 4
(energy content)
(work done by radiation pressure)S
r
U dS n r r H r E rm ex
È ˘Í ˙Î ˚
È ˘D = - ◊ -Í ˙Î ˚Ú

Ponderomotive Effects
2 20 0
2 20 0
( ) ( ) ( ) ( )4 4
( ) ( )4 4
( )
( ) ( )
( ) (
Expand wall displacements and forces in normal modes of vibration of the resonator
S
V
vS
V
dS n r r H r E r
d H r E r
r
dS r r
r q r
m
m mn
m mm
m exw
m ew
f
f f d
x f
È ˘◊ -Í ˙D Î ˚= -È ˘+Í ˙Î ˚
=
=
Ú
Ú
Ú
 ) ( ) ( )
( ) ( ) ( ) ( )
S
S
q r r dS
F r F r F F r r dS
m m
m m m mm
x f
f f
=
= =
Ú
 Ú

Ponderomotive Effects
2
2
2
12
12
Equation of motion of mechanical mode
(Euler-Lagrange)
(elastic potential energy) : elastic constant
= (kinetic energy)
d L L F L T Udt q q q
U c q c
qT c
mm m m
m m mm
mm
m m
m
∂ ∂ ∂F- + = = -∂ ∂ ∂
=
WW
Â
Â2
2
222
: frequency
= (power loss) : decay timec q
q q q Fc
m
m mm
m m m
mm m m m m
m m
tt
t
FW
W+ +W =
Â

Ponderomotive Effects
22 2 2 20
0 0
2
( ) ( )
The frequency shift caused by the mechanical mode is proportional to
Total frequency shift:
Static frequency shift:
q
FU k V
c U
t t
m m
mm m m m m m m
m m
mm
mm
w m
ww w wt
w w
w w
D
Ê ˆD + D +W D = - W = - WÁ ˜Ë ¯
D = D
D = D
Â2
Static Lorentz coefficient:
V k
k k
mm
mm
= -
=
 Â
Â

Ponderomotive Effects – Mechanical Modes
Fluctuations around steady state:0 (1 )
o
V V vm m mw w dw
dD = D +
= +Linearized equation of motion for mechanical mode:
2 2 20
2 2 k V vm m m m m mm
dw dw dw dt
+ +W = - W
The mechanical mode is driven by fluctuations in the electromagnetic mode amplitude.
Variations in the mechanical mode amplitude causes a variation of the electromagnetic mode frequency, which can cause a variation of its amplitude.
→Closed feedback system between electromagnetic and mechanical modes, that can lead to instabilities.
( )2 2 20
2 k V n tm m m m m mm
w w wt
D + D +W D = -W +

Lorentz Transfer Function
TEM-class cavities ANL, single-spoke, 354 MHz, β=0.4
simple spectrum with few modes
( )
2 2 20
2 20
2 2
2 2
2( ) ( )2
k V v
k Vv
i
m m m m m mm
m mm
mm
dw dw dw dt
dw w d ww w
t
+ +W = - W
- W=
W - +

Lorentz Transfer FunctionTM-class cavities (Jlab, 6-cell elliptical, 805 MHz, β=0.61)
Rich frequency spectrum from low to high frequenciesLarge variations between cavities

GDR and SEL

Generator-Driven Resonator
• In a generator-driven resonator the coupling between the electromagnetic and mechanical modes can lead to two ponderomotive instabilities
• Monotonic instability : Jump phenomenon where the amplitudes of the electromagnetic and mechanical modes increase or decrease exponentially until limited by non-linear effects
• Oscillatory instability : The amplitudes of both modes oscillate and increase at an exponential rate until limited by non-linear effects

Self-Excited Loop-Principle of Stabilization
Controlling the external phase shift l can compensate for the fluctuations in the cavity frequency ωc so the loop is phase locked to an external frequency reference ωr.
Instead of introducing an additional external controllable phase shifter, this is usually done by adding a signal in quadrature
→ The cavity field amplitude is unaffected by the phase stabilization even in the absence of amplitude feedback.
Aq A
Ap
tan2
cc lQ
ww w q= +

Self-Excited Loop – Block Diagram

Self-Excited Loop
• Resonators operated in self-excited loops in the absence of feedback are free of ponderomotive instabilities. An SEL is equivalent to the ideal VCO.– Amplitude is stable – Frequency of the loop tracks the frequency of the
cavity
• Phase stabilization can reintroduce instabilities, but they are easily controlled with small amount of amplitude feedback

Input-Output Variables• Generator - driven cavity
• Cavity in a self-excited loop
Detuning (ω - ωc)
Field amplitude (Vo)Generator amplitude (Vg)
Cavity phase shift ( l)
Ponderomotive effects
Loop phase shift ( l)
Field amplitude (Vo)Limiter output (Vg)
Loop frequency (ω)
Pondermotive effects

Input-Output Variables Generator-Driven Resonator
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-6 -5 -4 -3 -2 -1 0 1 2
Detuning (Norm.)
Am
plitu
de (N
orm
.)
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
-6 -5 -4 -3 -2 -1 0 1 2
Detuning (Norm.)
Cai
ty P
hase
Shi
ft

Input-Output Variables Self-Excited Loop
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-1.5 -1.0 -0.5 0.0 0.5 1.0 1.5
Loop Phase Shift
Am
plitu
de (N
orm
.)
-6.0
-5.0
-4.0
-3.0
-2.0
-1.0
0.0
1.0
2.0
-1.5 -1.0 -0.5 0.0 0.5 1.0 1.5
Loop Phase Shift
Det
unin
g (N
orm
.)

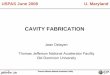
Lorentz Detuning
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
-6 -5 -4 -3 -2 -1 0 1 2
Detuning (Norm.)
Am
plitu
de (N
orm
.)
During transient operation (rise time and decay time) the loop frequency automatically tracts the resonator frequency. Lorentz detuning has no effect and is automatically compensated

Microphonics
• Microphonics: changes in frequency caused by connections to the external world– Vibrations– Pressure fluctuations
When phase and amplitude feedbacks are active, ponderomotive effects can change the response to external disturbances
( )2 2 20
2 2 k V v n tm m m m m mm
dw dw dw dt
+ +W = - W +

Microphonics
Two extreme classes of driving terms:
• Deterministic, monochromatic– Constant, well defined frequency– Constant amplitude
• Stochastic– Broadband (compared to bandwidth of mechanical
mode)– Will be modeled by gaussian stationary white noise
process

Microphonics (probability density)
Single gaussian
Noise driven
Bimodal
Single-frequency driven
Multi-gaussian
Non-stationary noise
805 MHz TM 805 MHz TM 172 MHz TEM

Microphonics (frequency spectrum)TM-class cavities (JLab, 6-cell
elliptical, 805 MHz, β=0.61)Rich frequency spectrum from
low to high frequenciesLarge variations between
cavities
TEM-class cavities (ANL, single-spoke, 354 MHz, β=0.4)Dominated by low frequency (<10 Hz) from pressure fluctuations Few high frequency mechanical modes that contribute little to microphonics level.

Probability Density (histogram)
Harmonic oscillator (Ωμ,τμ) driven by:
Single frequency, constant amplitude White noise, gaussian
2 2max
1( )p dwp dw dw
=-
212
1( ) exp2
pw
dwsw
dws p
È ˘Ê ˆÍ ˙Á ˜Í ˙Á ˜Ë ¯Í ˙Î ˚
-=

Autocorrelation Function
/( )( ) cos( )(0)
Rr eR
-= =
( )( ) cos( )
(0) dR
rRdw
dwdw
tt w t= =
0
1( ) ( ) ( ) lim ( ) ( )T
x TR x t x t x t x t dt
Tt t t
Æ•= + = +Ú
Single frequency, constant amplitude White noise, gaussianHarmonic oscillator (Ωμ,τμ) driven by:
/( )( ) cos( )
(0)R
r eR
mt tdwdw m
dw
tt t -= = W

Stationary Stochastic Processesx(t): stationary random variable
Autocorrelation function:
Spectral Density Sx(ω): Amount of power between ω and dω
Sx(ω) and Rx(τ) are related through the Fourier Transform (Wiener-Khintchine)
Mean square value:
0
1( ) ( ) ( ) lim ( ) ( )T
x TR x t x t x t x t dt
Tt t t
Æ•= + = +Ú
1( ) ( ) ( ) ( )2
i ix x x xS R e d R S e dwt wtw t t t w w
p• •-
-• -•= =Ú Ú
2 (0) ( )x xx R S dw w•
-•= = Ú

Stationary Stochastic ProcessesFor a stationary random process driving a linear
system
( ) ( ) ( ) ( )
( ) ( ) [ ][ ] [ ]
( )
2 2
2
22
0 0
: ( ) ( )
( ) ( ) : ( ) ( )
( ) ( ) ( )
( )
auto correlation function of
spectral density of
y y x x
y x
y x
y x
x
y R S d x R S d
R R y t x t
S S y t x t
S S T i
y S dT i
w w w w
t t
w w
w w w
w ww
+• +•
-• -•
+•
-•
= = = =
È ˘Î ˚
=
=
Ú Ú
Ú
( )x t ( )y t( )T iw

Performance of Control SystemResidual phase and amplitude errors caused by
microphonicsCan also be done for beam current amplitude and phase
fluctuations
2
Assume a single mechanical oscillator of frequency and decay time
excited by white noise of spectral density Am mtW

Performance of Control System
( )
( ) ( )( )
( ) ( )( )
2
22 2 2 222 2 2
22
22 2 22
22
22 2 22 2
2
2
2
2
2
2
ex
a
a ex
ex
d
G i di
G i
G i G i d di
G i
G i G i d di
A A A
v A
A
mm
m mm
mm
mmm
jm
m jmm
m
ww w
w wt
w
w w w ww wt
w
w w w ww w
t
ptdw
d dwpt
dj dwpt
+• +•
-• -•
+• +•
-• -•
+• +•
-• -•
- + + W
- + + W
- + + W
< >= = =W
W< >= = < >
W< >= = < >
Ú Ú
Ú Ú
Ú Ú

The Real World

The Real World

The Real World

Piezo control of microphonics
MSU, 6-cell elliptical 805 MHz, β=0.49
Adaptive feedforward compensation

Piezo Control of MicrophonicsFNAL, 3-cell 3.9 GHz

SEL and GDR
• SEL are best suited for high gradient, high-loaded Q cavities operated cw.– Well behaved with respect to ponderomotive
instabilities– Unaffected by Lorentz detuning at power up– Able to run independently of external rf source– Rise time can be random and slow (starts from noise)
• GDR are best suited for low-Q cavities operated for short pulse length.– Fast predictable rise time– Power up can be hampered by Lorentz detuning

SC Control Systems
• CW accelerators (Atlas, CEBAF) use simple proportional negative feedback.
• Pulsed accelerators (TESLA, SNS) need more complex control methods, adaptive control, and feed forward techniques.

Control System Example
At CEBAF, Nuclear experiments require an energy spread of ~ 10-4
To meet this each individual cavity must have no more than ~ 10-5 amplitude variation.
[ΔE/E ~ 1/N1/2 where N is the number of cavities]
Background microphonics are 5% (peak) do to QL = 107
Therefore gain required to control the cavity field is 500 or ~ 53 dB in gain.

TESLA Control System

Basic LLRF Block Diagram

Low level rf control development
Concept for a LLRF control system

Pulsed Operation
• Under pulsed operation Lorentz detuning can have a complicated dynamic behavior

Pulsed Operation
• Fast piezoelectric tuners can be used to compensate the dynamic Lorentz detuning

Status of Microphonics Control• Microphonics and ponderomotive instabilities issues
in high-Q SRF cavities were “hot topics” in the early days (~70s), especially in low-β applications
• They were solved and are well understood• They are being rediscovered in medium- to high-β
applications• Today’s challenges:
– Large scale (cavities and accelerators): need for optimization
– Finite beam loading• Small but non-negligible current (e.g. RIA)• Low current resulting from the not quite perfect
cancellation of 2 large currents (ERLs)
Recommended