1
Sanjiban Choudhury
PID and Pure Pursuit Control
TAs: Matthew Rockett, Gilwoo Lee, Matt Schmittle
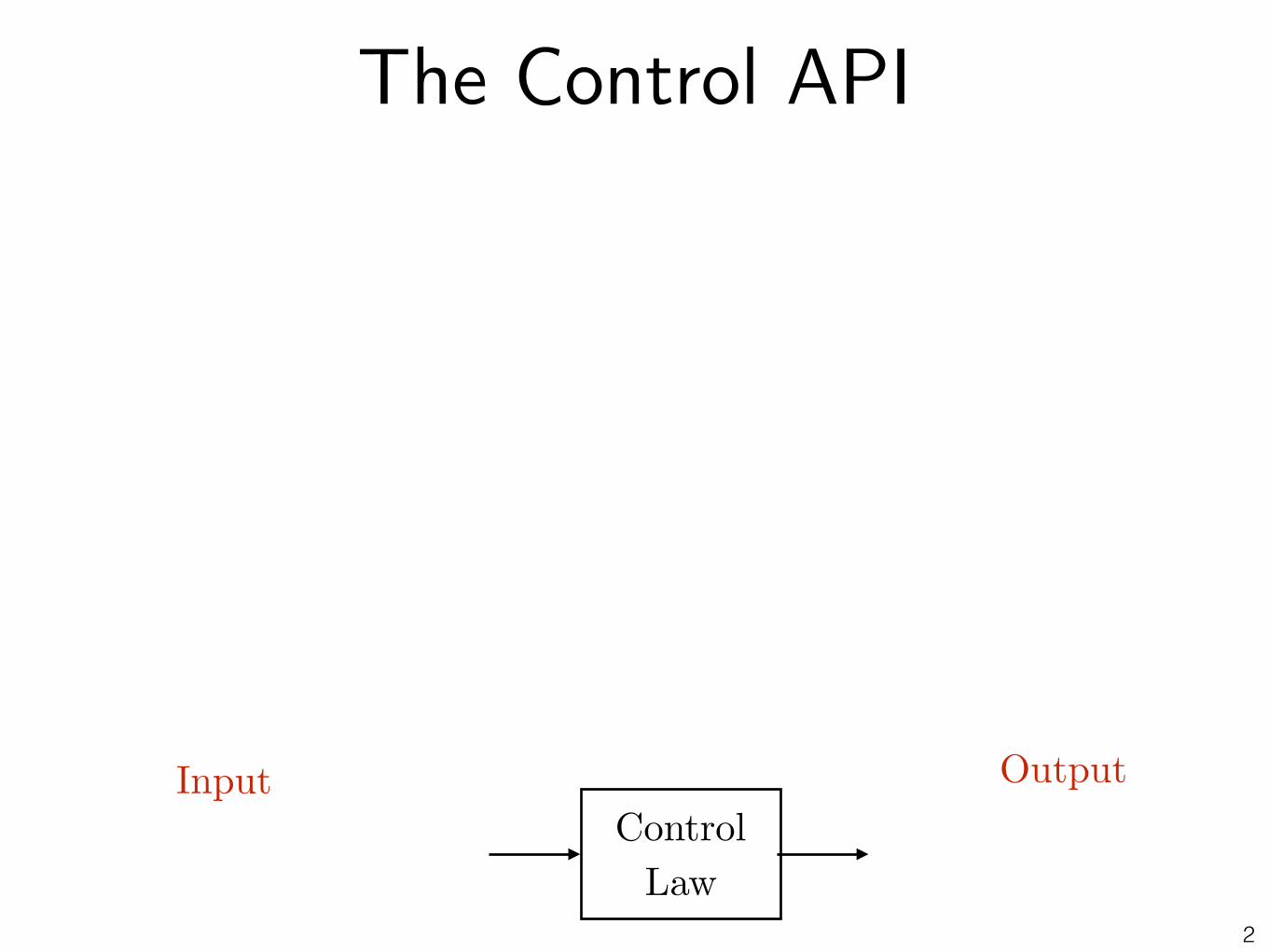
The Control API
2
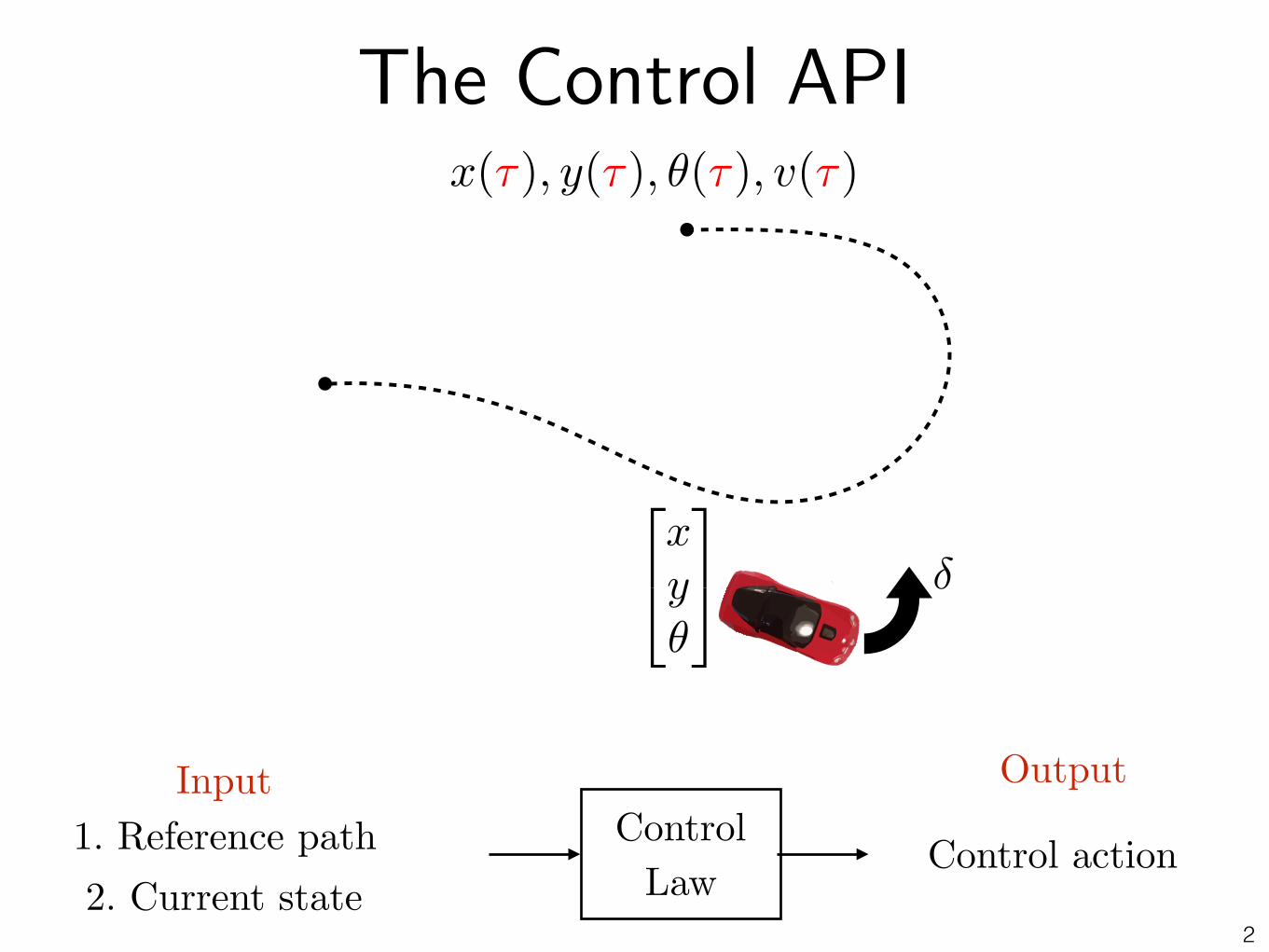
Input OutputControl
Law
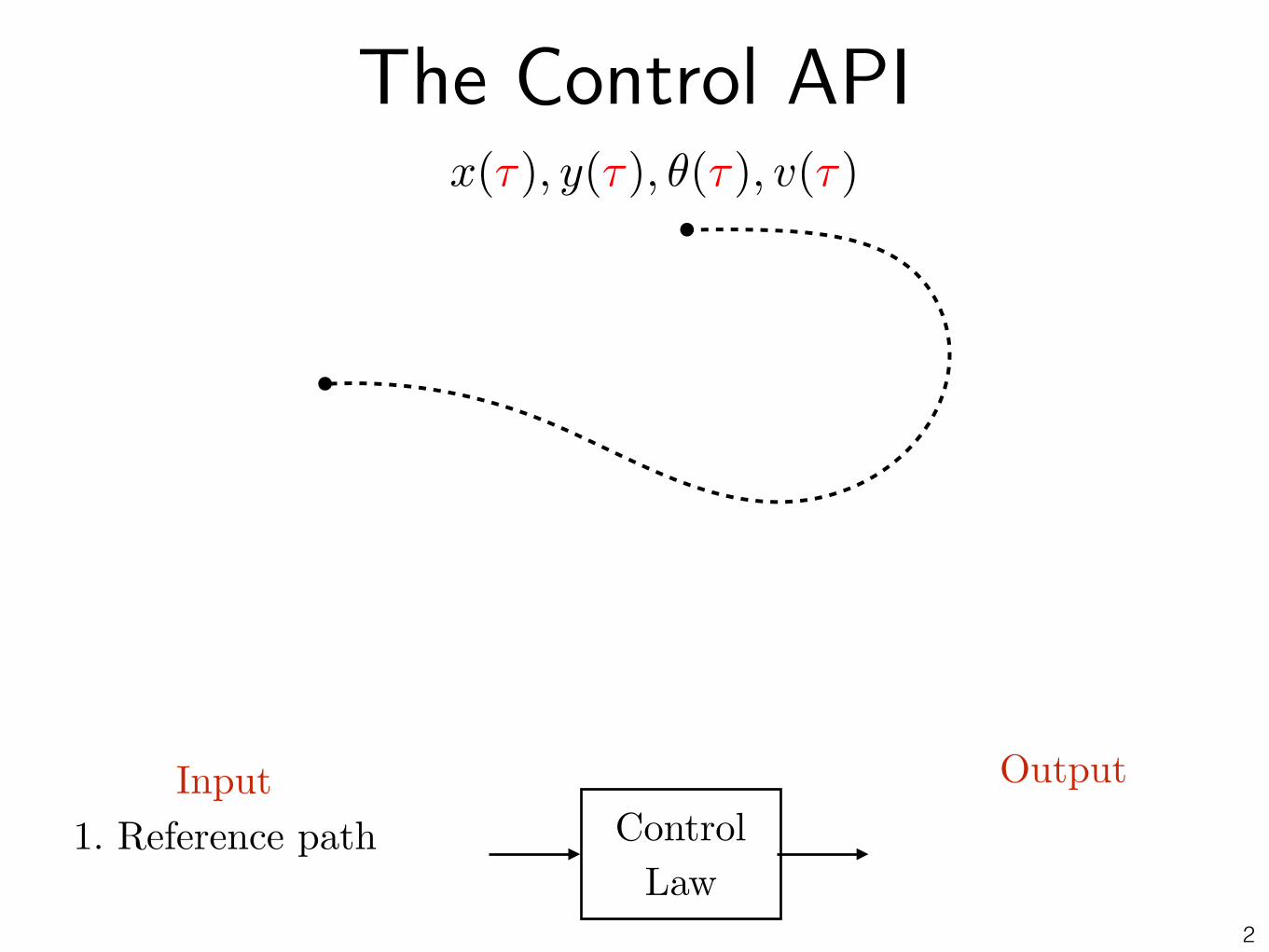
The Control API
2
Input Output
x(⌧), y(⌧), ✓(⌧), v(⌧)
1. Reference path Control Law
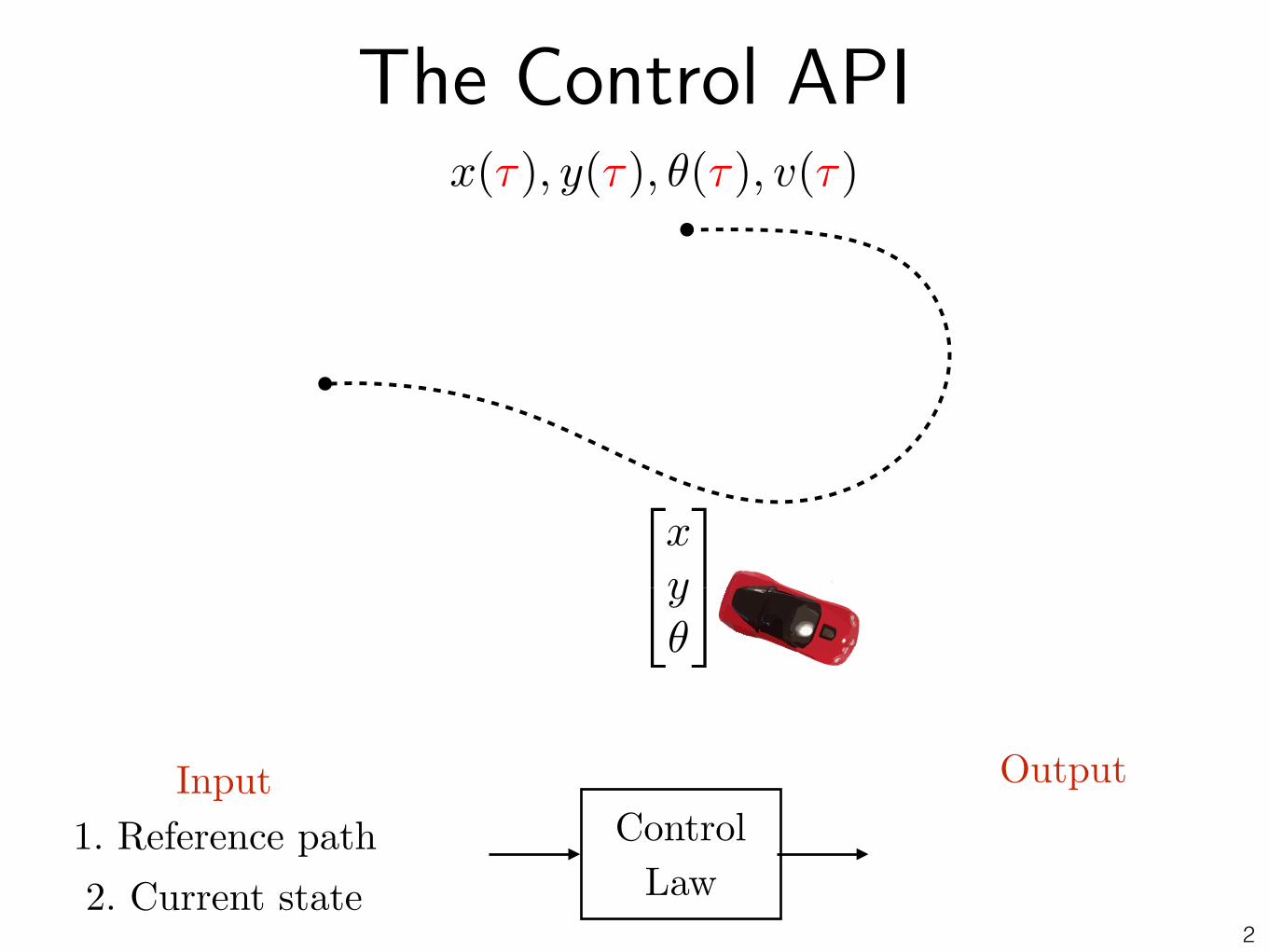
The Control API
2
Input Output
x(⌧), y(⌧), ✓(⌧), v(⌧)
1. Reference path 2. Current state
2
4x
y
✓
3
5
Control Law
The Control API
2
Input Output
x(⌧), y(⌧), ✓(⌧), v(⌧)
1. Reference path 2. Current state
2
4x
y
✓
3
5
Control action
�
Control Law
Steps to designing a controller
3
1. Get a reference path / trajectory to track
2. Pick a point on the reference
3. Compute error to reference point
4. Compute control law to minimize error
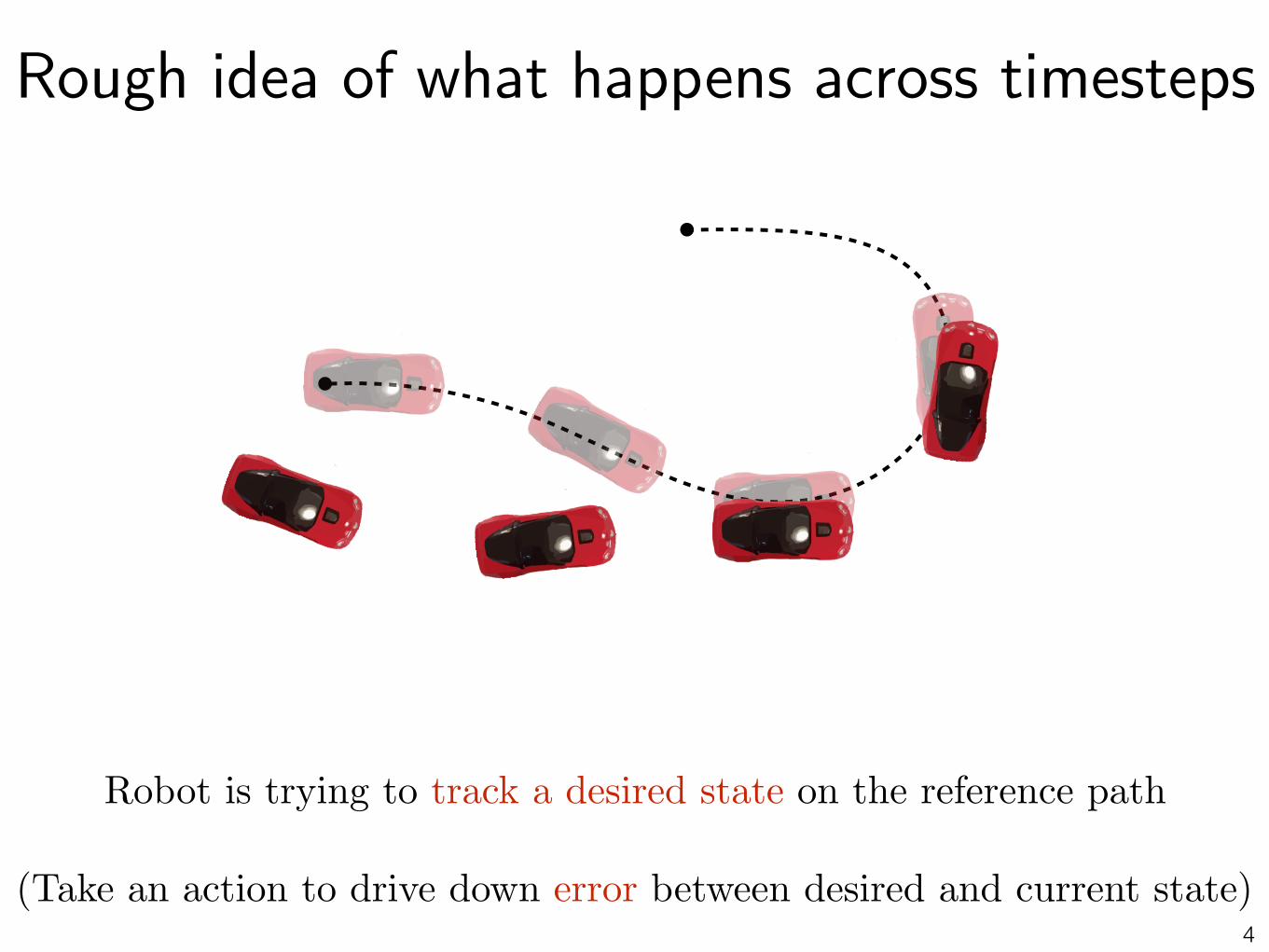
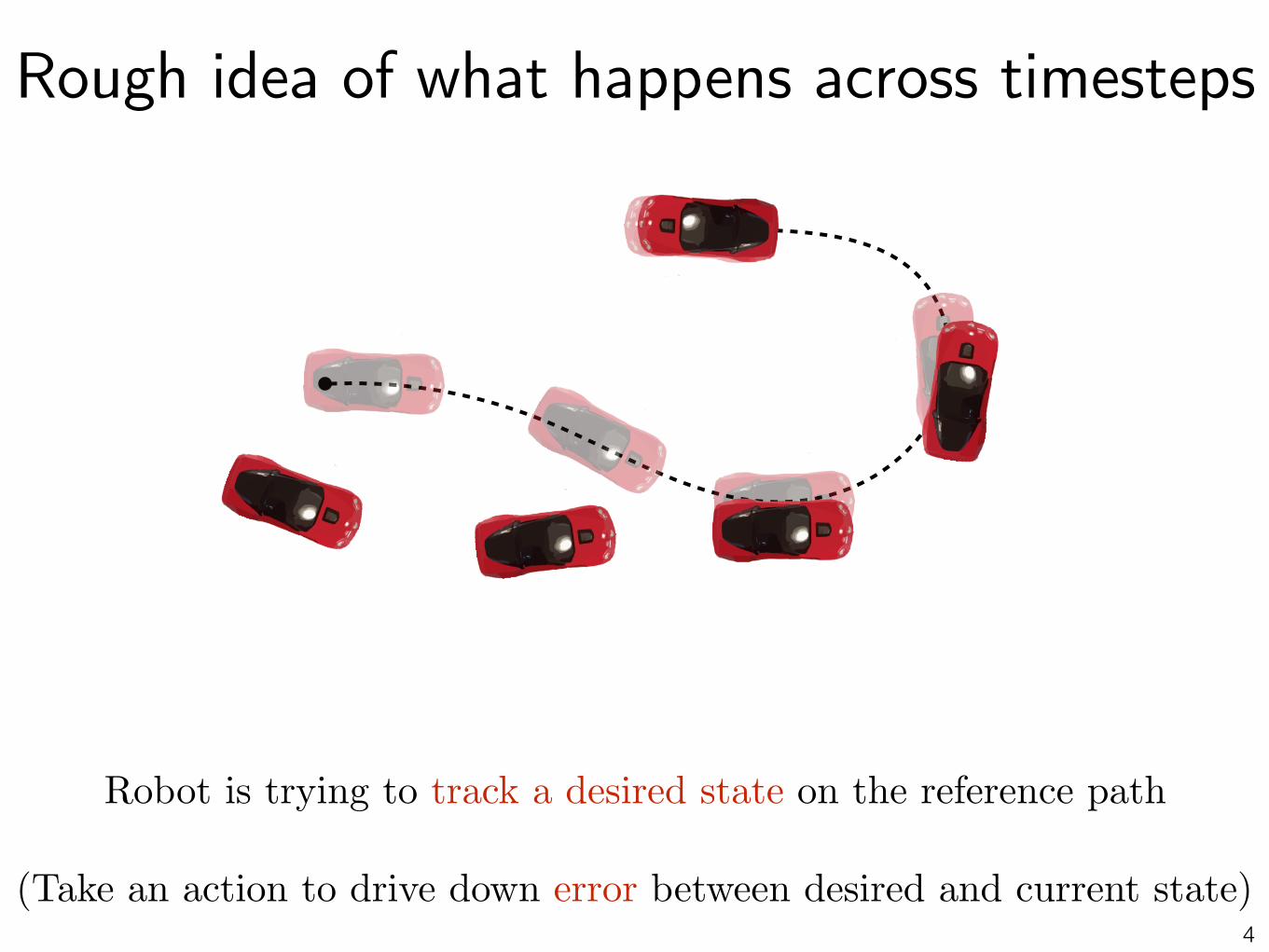
Rough idea of what happens across timesteps
4
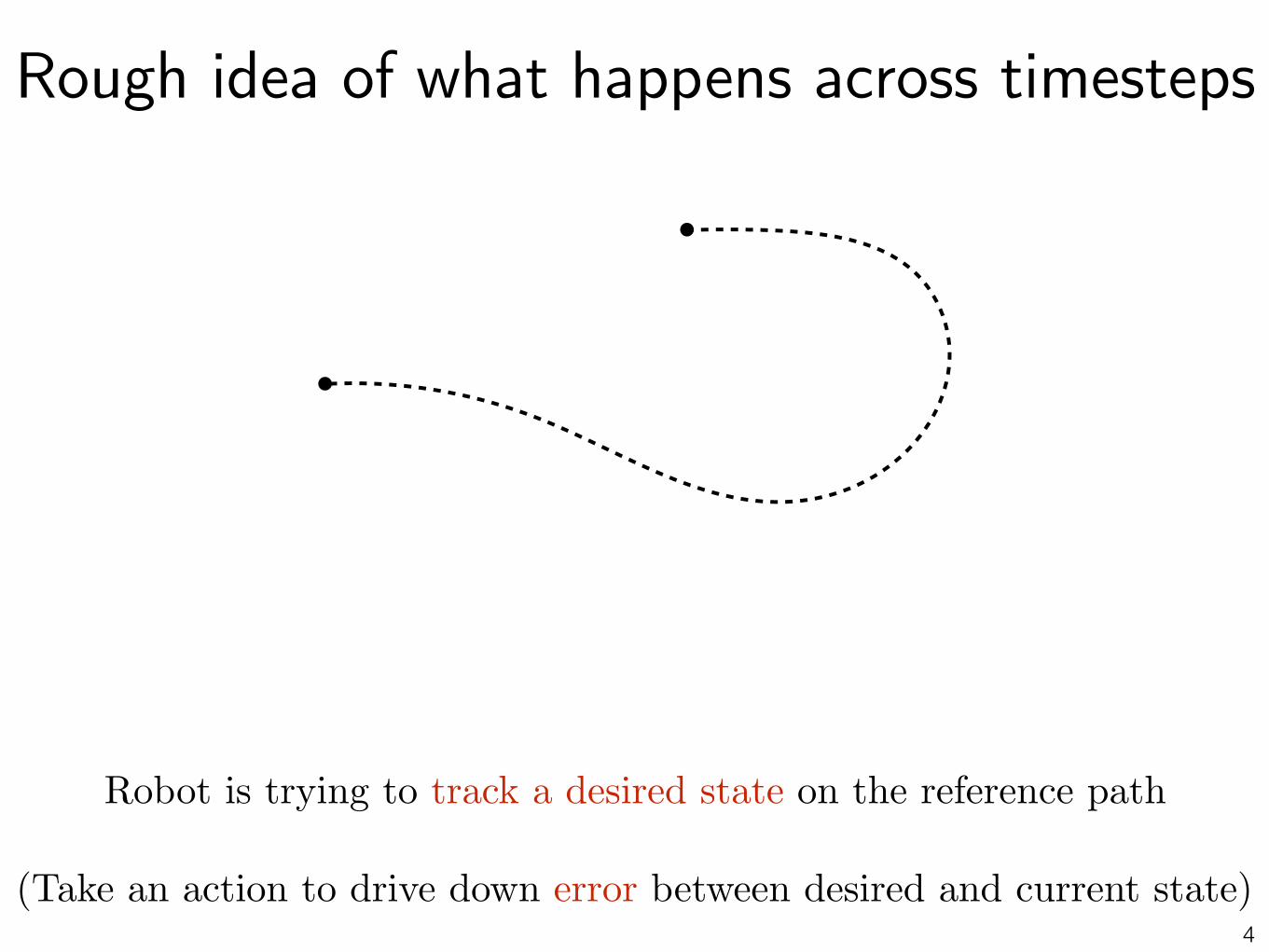
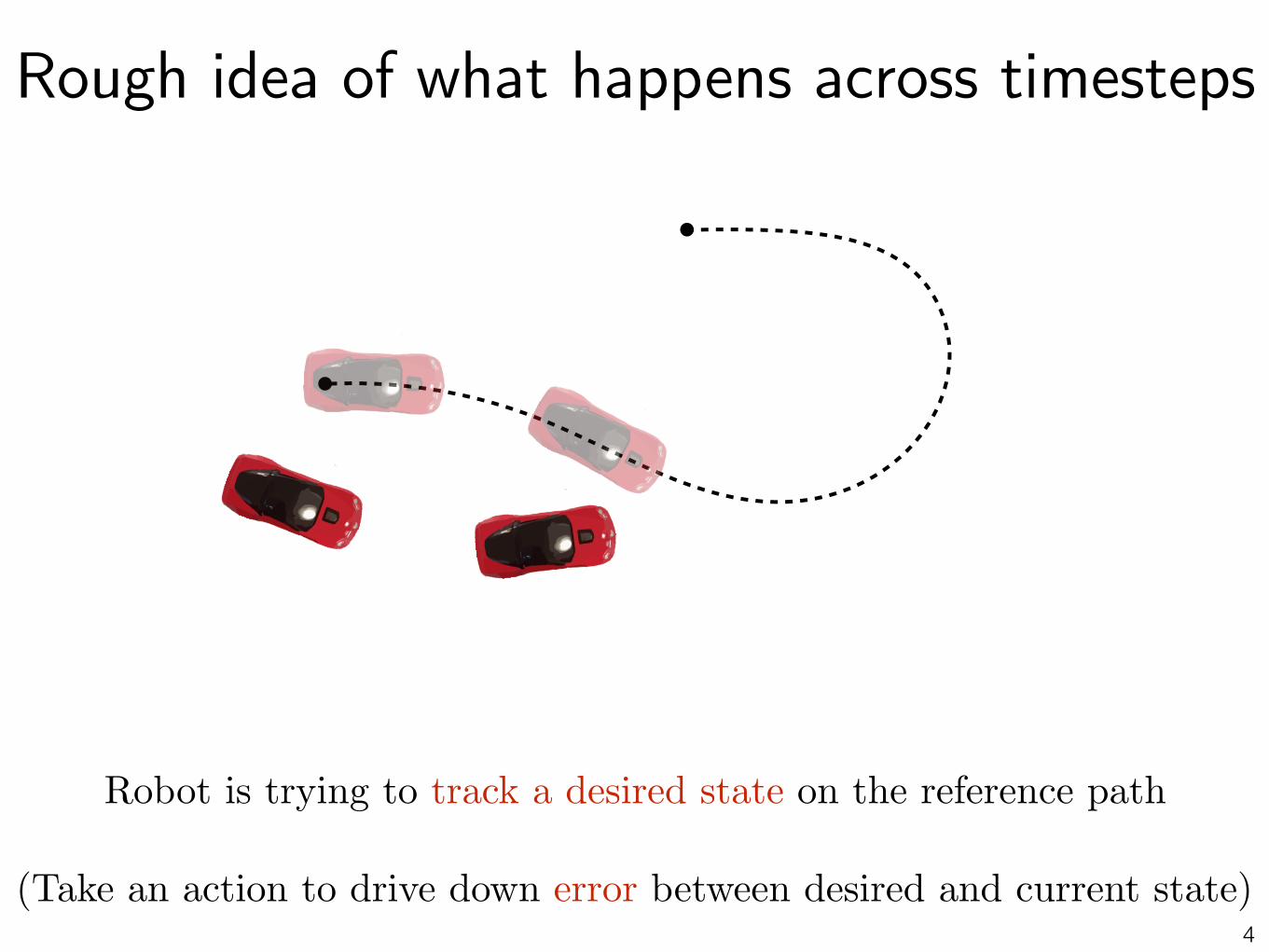
Robot is trying to track a desired state on the reference path
(Take an action to drive down error between desired and current state)

Rough idea of what happens across timesteps
4
Robot is trying to track a desired state on the reference path
(Take an action to drive down error between desired and current state)
Rough idea of what happens across timesteps
4
Robot is trying to track a desired state on the reference path
(Take an action to drive down error between desired and current state)

Rough idea of what happens across timesteps
4
Robot is trying to track a desired state on the reference path
(Take an action to drive down error between desired and current state)
Rough idea of what happens across timesteps
4
Robot is trying to track a desired state on the reference path
(Take an action to drive down error between desired and current state)
Rough idea of what happens across timesteps
4
Robot is trying to track a desired state on the reference path
(Take an action to drive down error between desired and current state)
Steps to designing a controller
5
1. Get a reference path / trajectory to track
2. Pick a point on the reference
3. Compute error to reference point
4. Compute control law to minimize error

Step 1: Get a reference path
6
x(⌧), y(⌧), ✓(⌧), v(⌧)
2
4x
y
✓
3
5
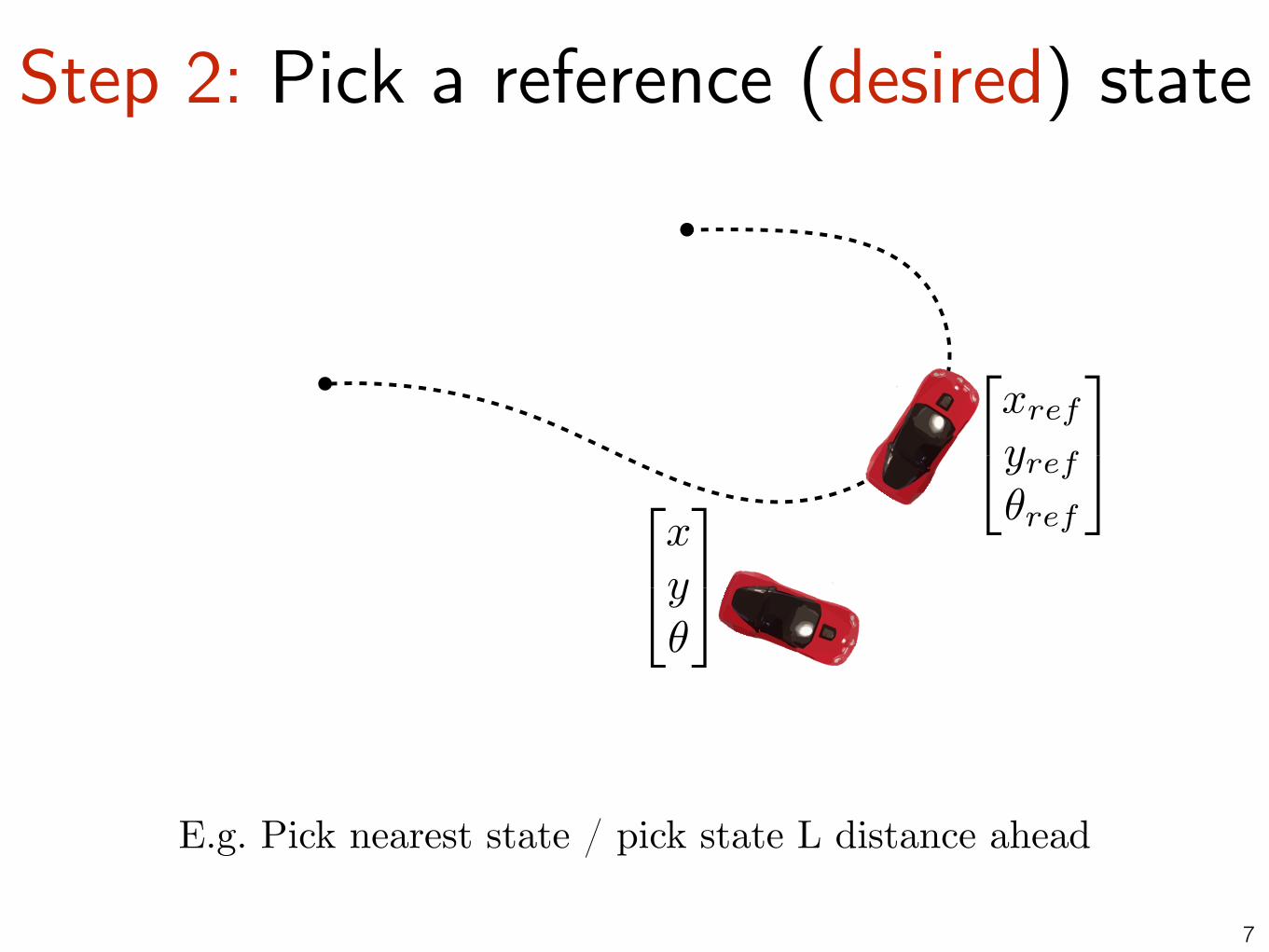
Step 2: Pick a reference (desired) state
7
E.g. Pick nearest state / pick state L distance ahead
2
4xref
yref
✓ref
3
52
4x
y
✓
3
5
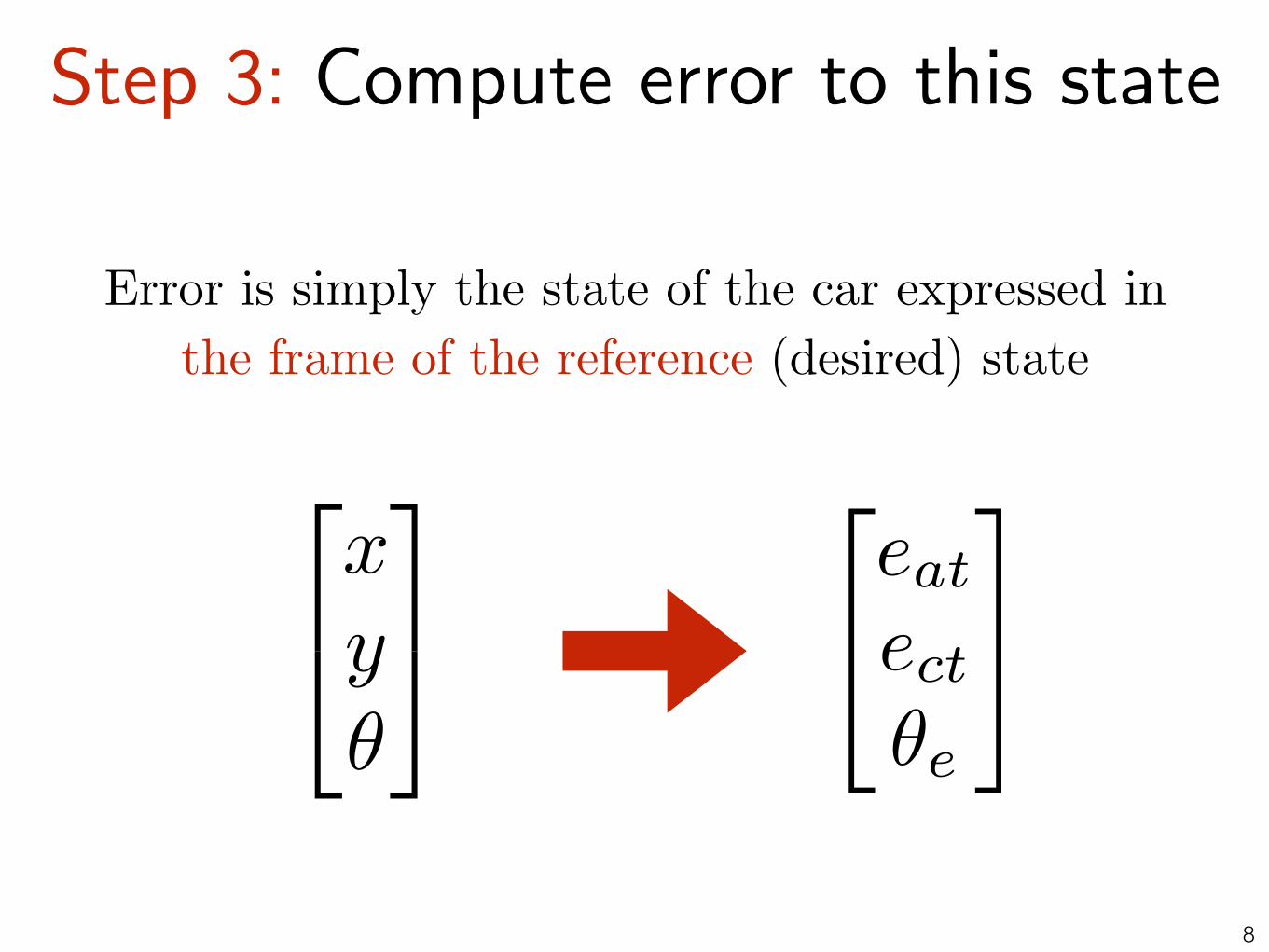
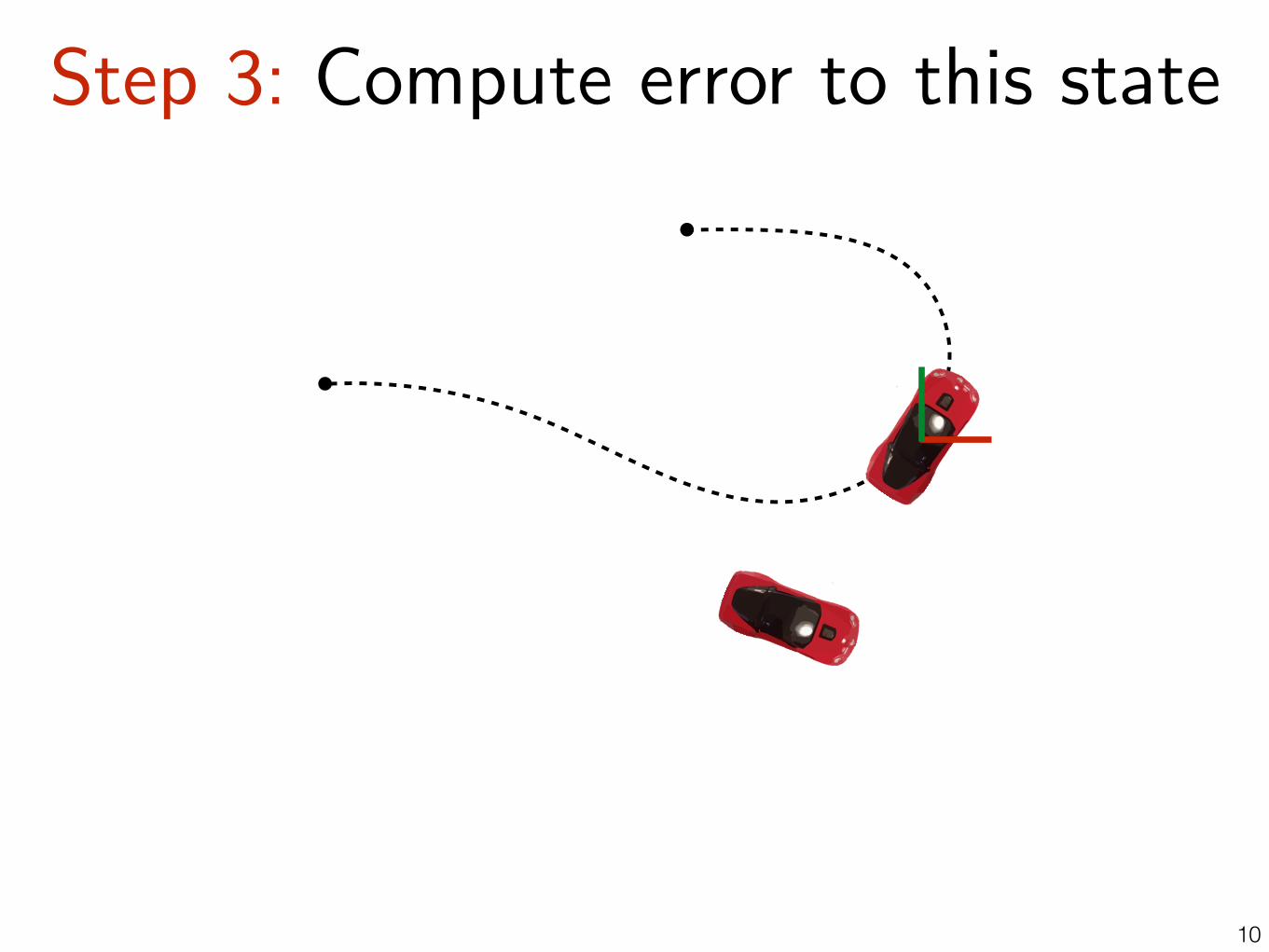
Step 3: Compute error to this state
8
Error is simply the state of the car expressed in the frame of the reference (desired) state
2
4x
y
✓
3
5
2
4eatect✓e
3
5
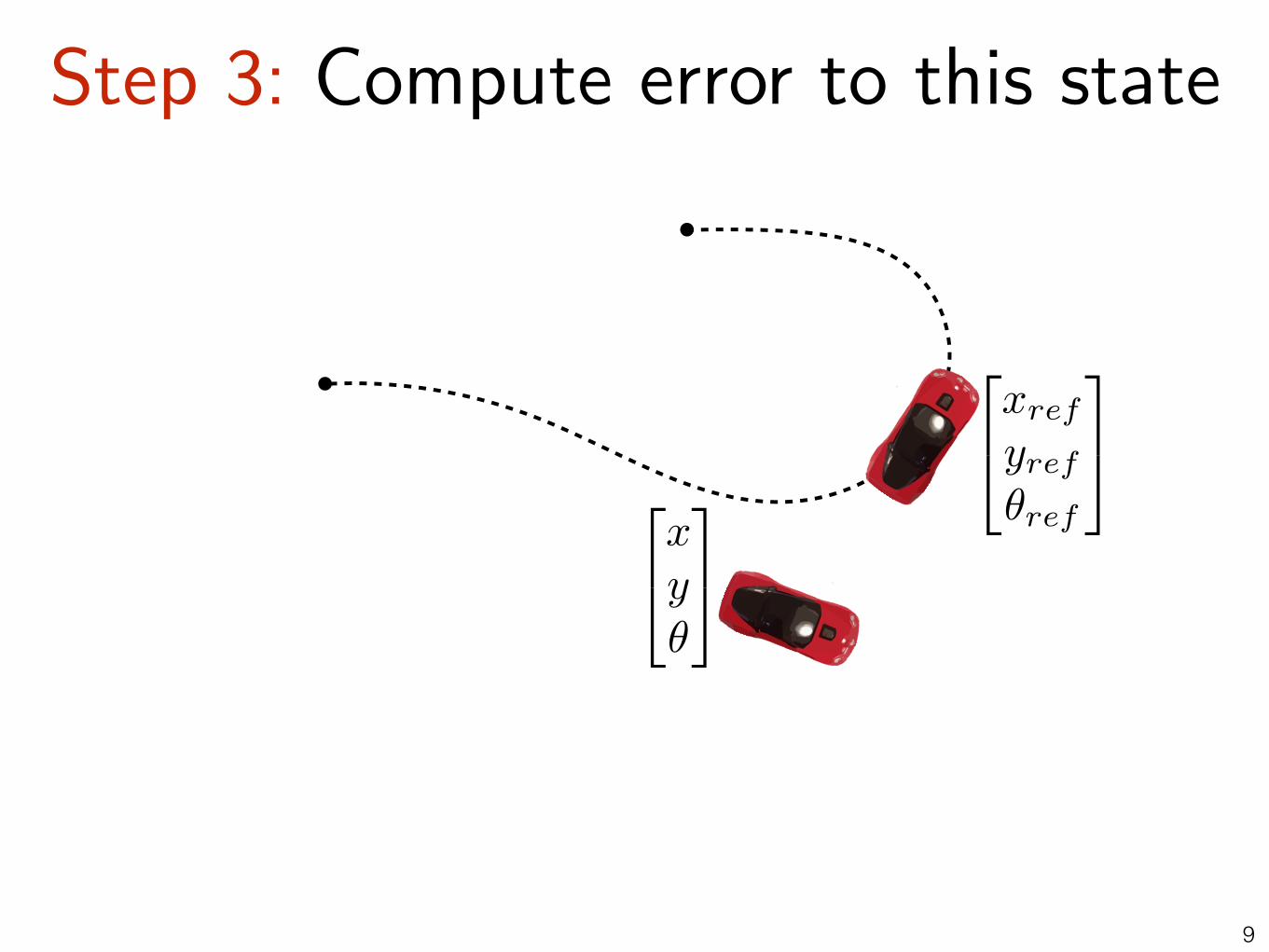
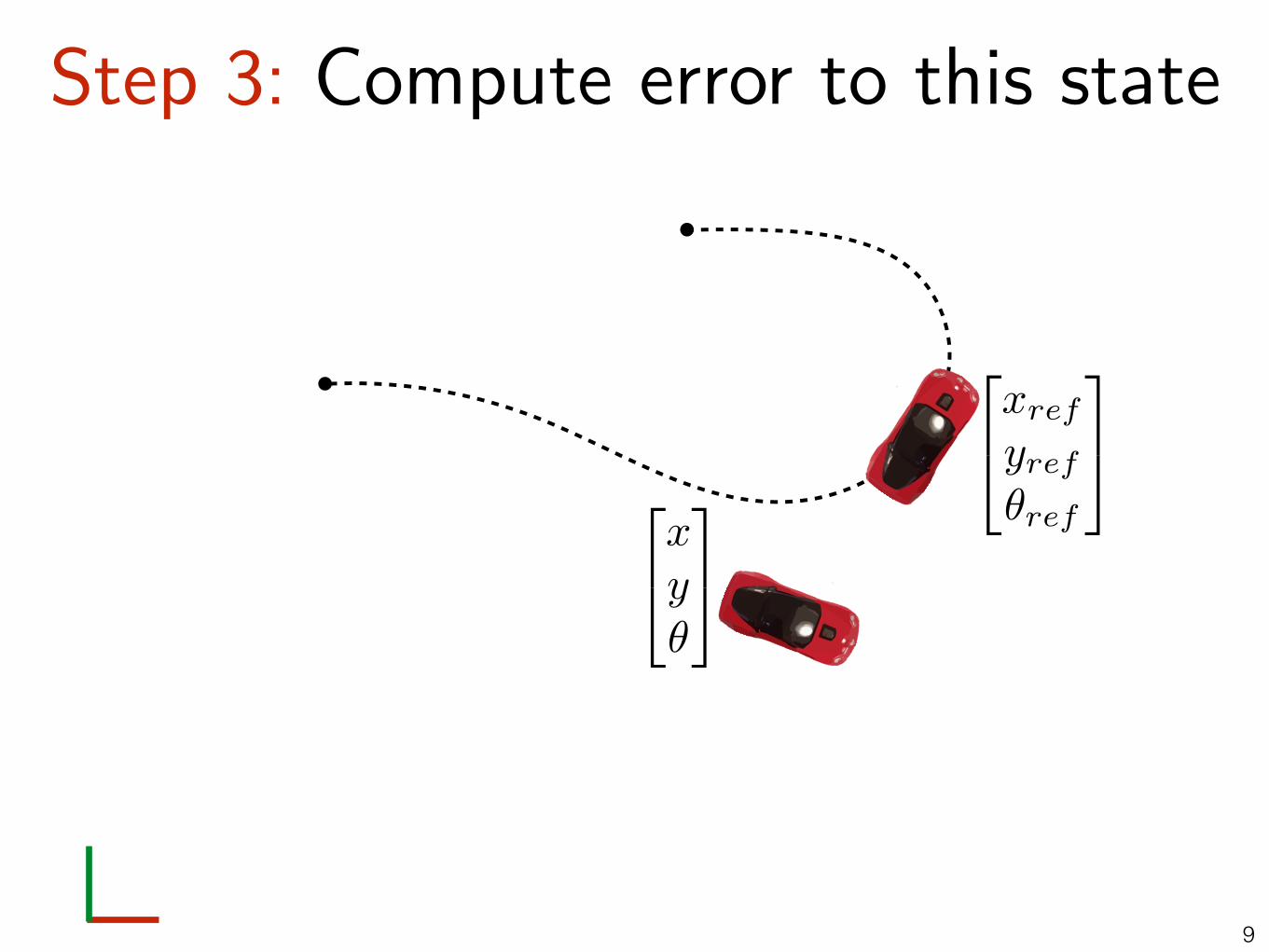
Step 3: Compute error to this state
9
2
4xref
yref
✓ref
3
52
4x
y
✓
3
5
Step 3: Compute error to this state
9
2
4xref
yref
✓ref
3
52
4x
y
✓
3
5

Step 3: Compute error to this state
9
2
4xref
yref
✓ref
3
52
4x
y
✓
3
5

Step 3: Compute error to this state
9
2
4xref
yref
✓ref
3
52
4x
y
✓
3
5
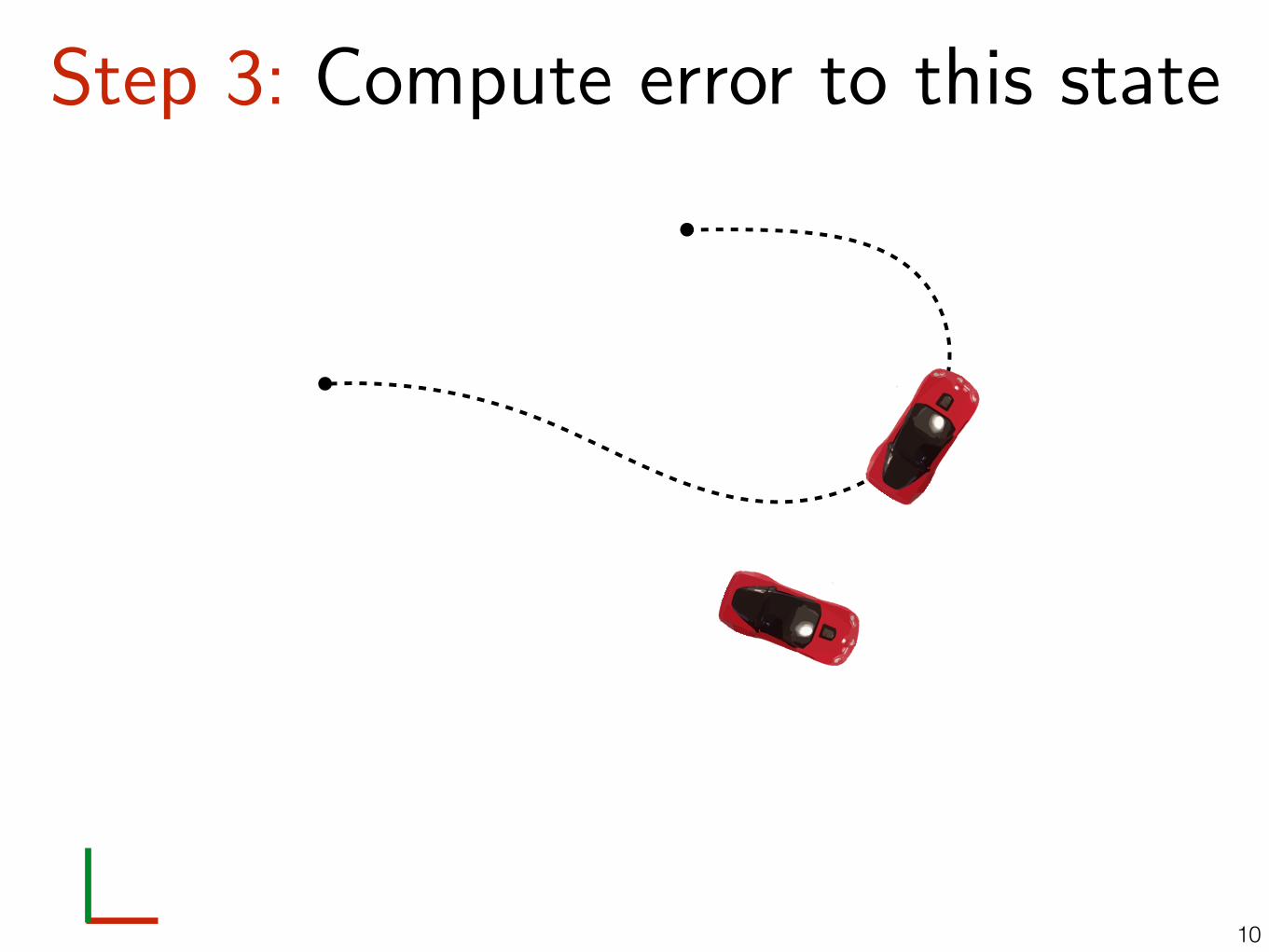
Step 3: Compute error to this state
10
Step 3: Compute error to this state
10
Step 3: Compute error to this state
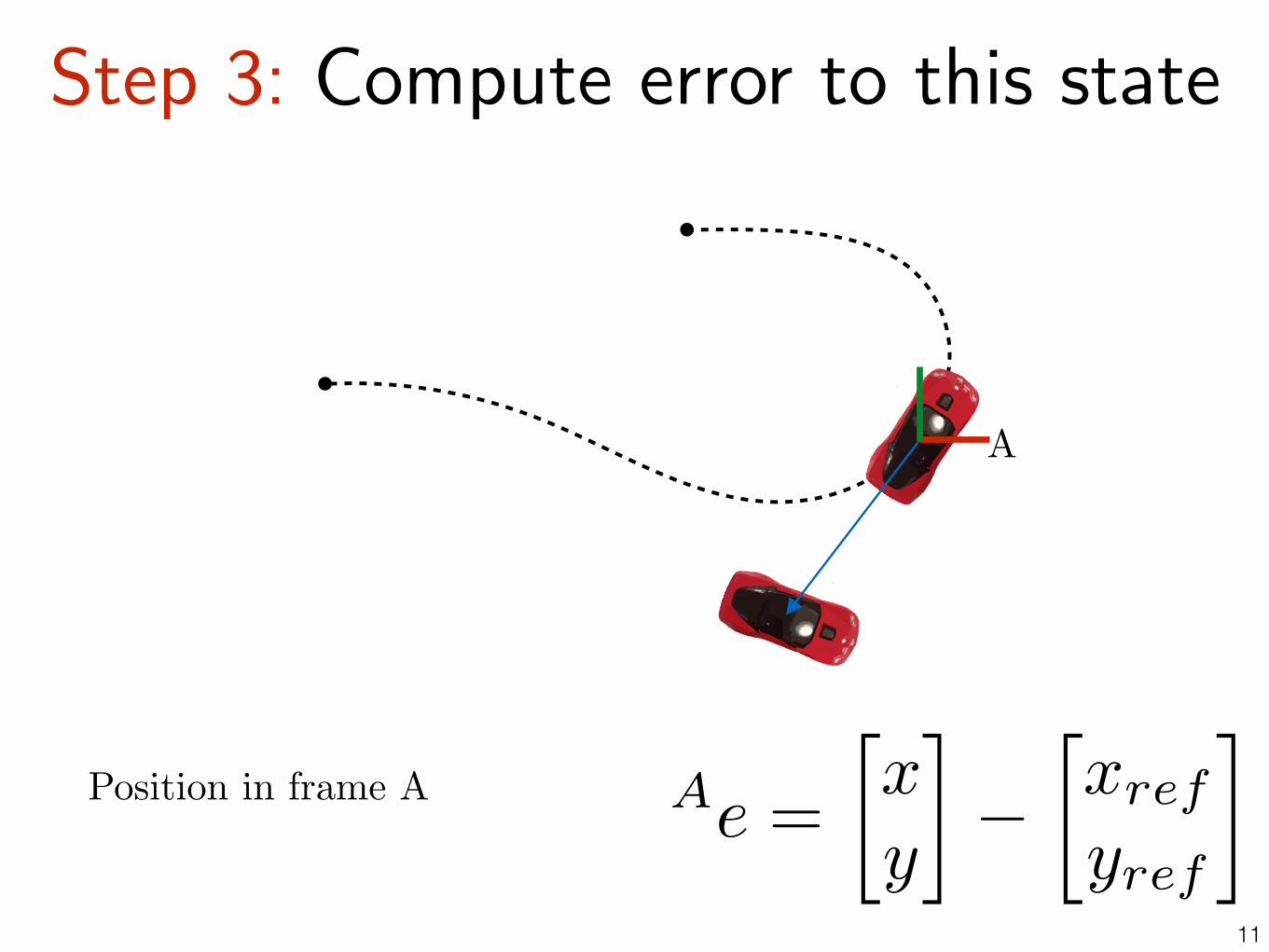
11
A
Ae =
x
y
��
xref
yref
�Position in frame A
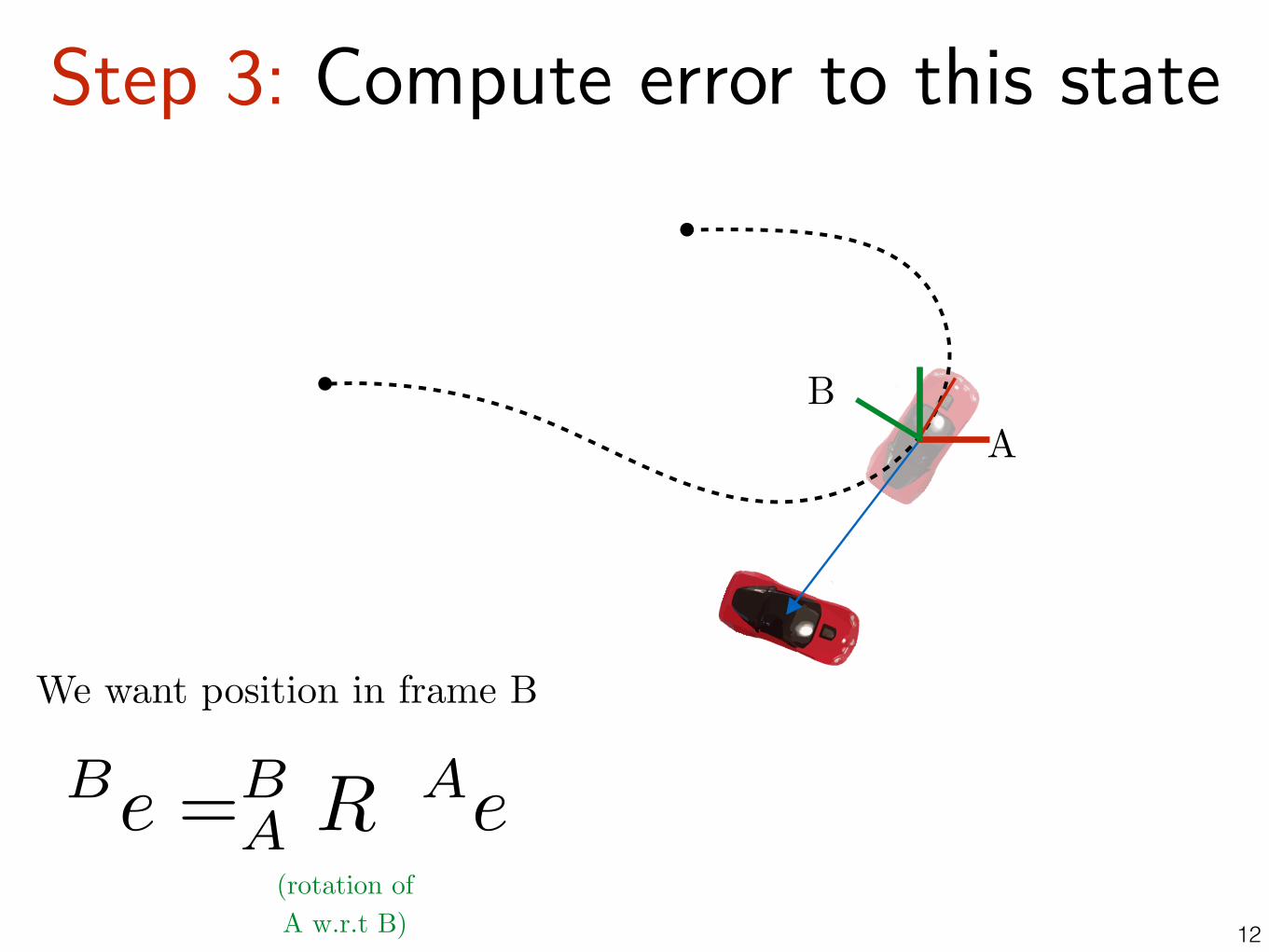
Step 3: Compute error to this state
12
AB
We want position in frame B
Be =BA R Ae
(rotation of A w.r.t B)
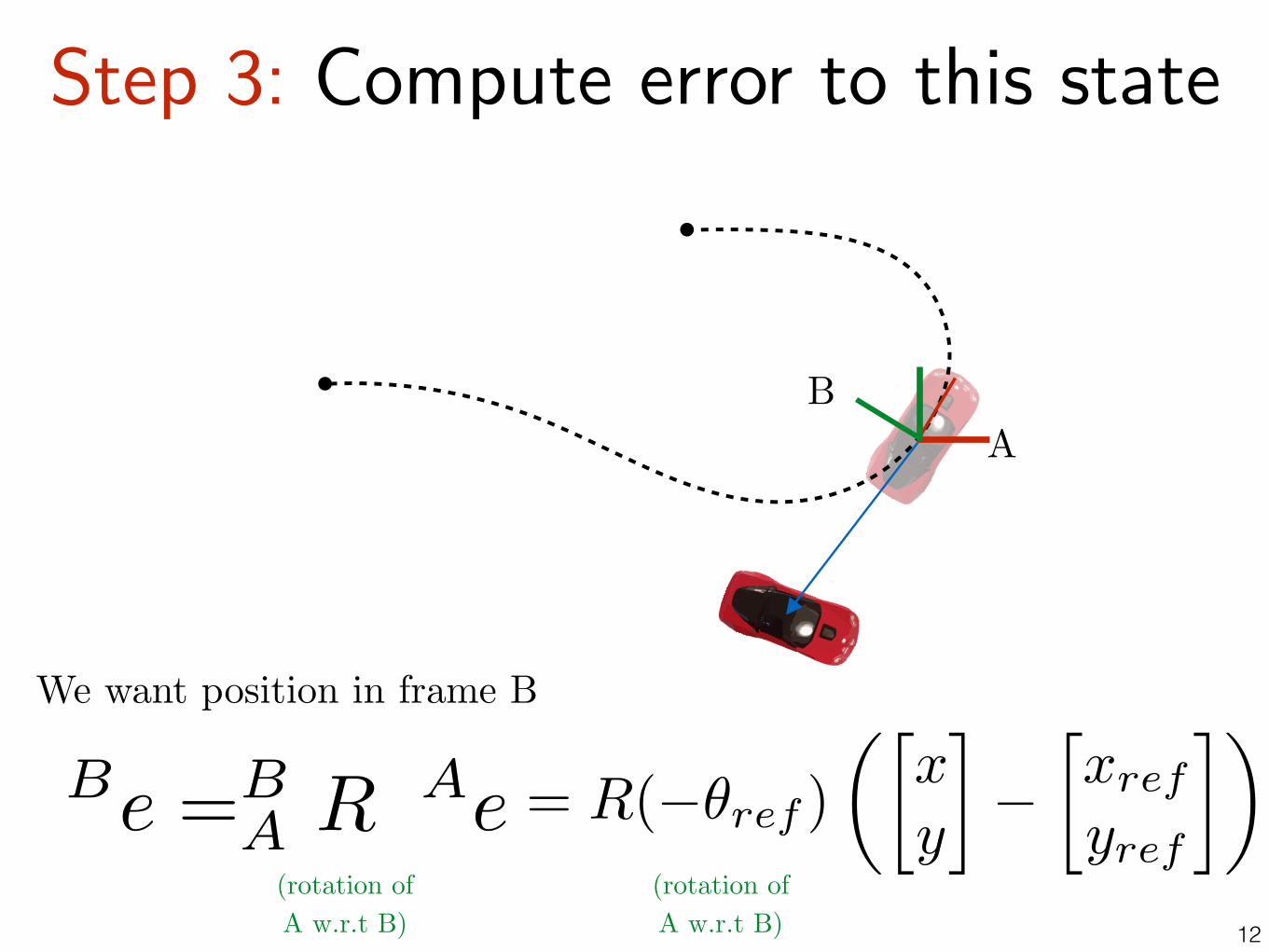
Step 3: Compute error to this state
12
AB
We want position in frame B
Be =BA R Ae
(rotation of A w.r.t B)
= R(�✓ref )
✓x
y
��xref
yref
�◆
(rotation of A w.r.t B)

Step 3: Compute error to this state
13
AB
We want position in frame B
Be =BA R Aee =
cos(✓ref ) sin(✓ref )
� sin(✓ref ) cos(✓ref )
�✓x
y
��
xref
yref
�◆eatect
�=

Step 3: Compute error to this state
14
AB
We heading in frame B
✓e = ✓ � ✓ref

Step 3: Compute error to this state
15
ect = � sin(✓ref )(x� xref ) + cos(✓ref )(y � yref )
eat = cos(✓ref )(x� xref ) + sin(✓ref )(y � yref )
{ eat {
ect
✓e = ✓ � ✓ref
✓e
(Along-track)
(Cross-track)
(Heading)
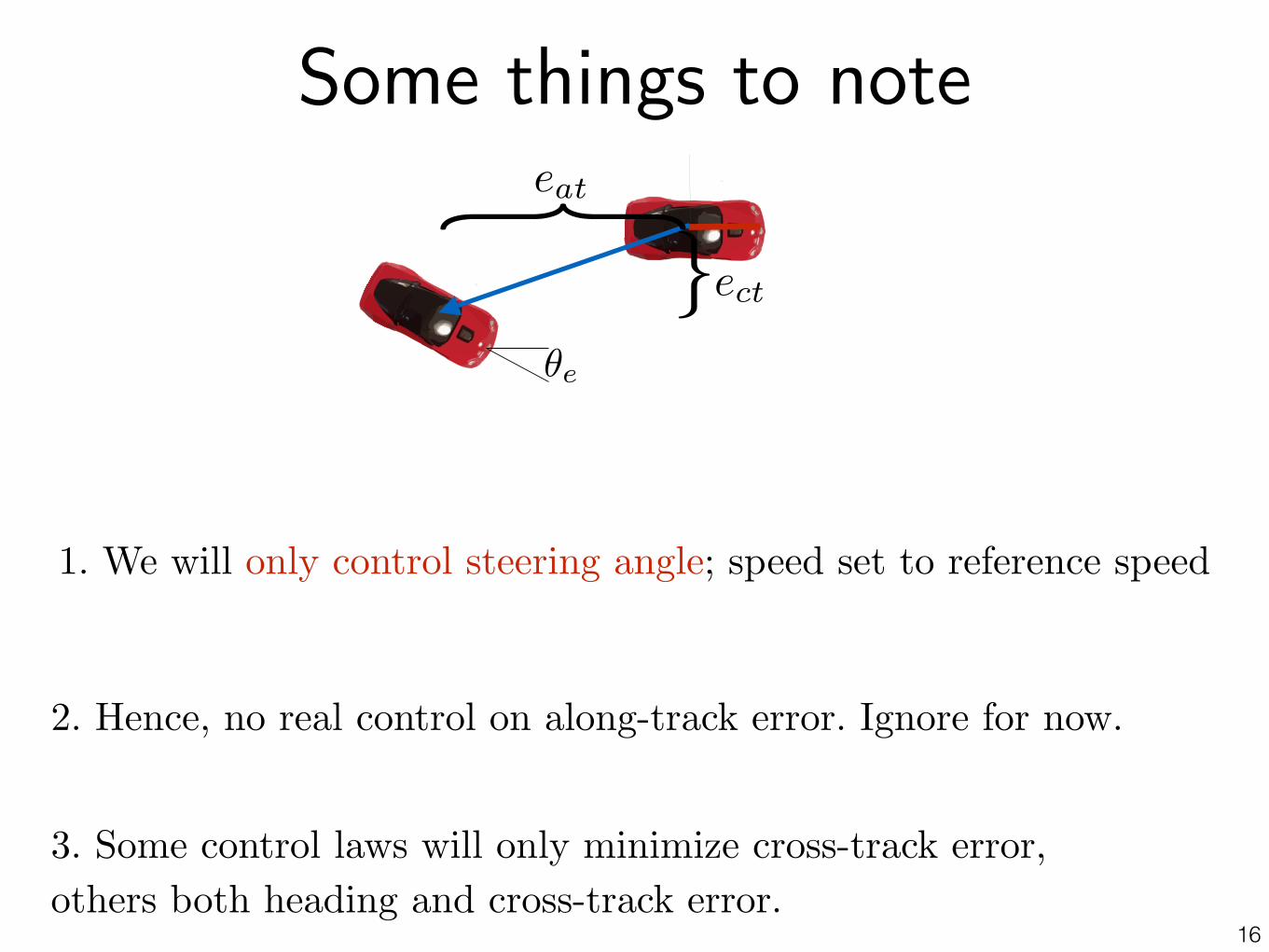
Some things to note
16
{ eat {
ect
✓e
1. We will only control steering angle; speed set to reference speed
2. Hence, no real control on along-track error. Ignore for now.
3. Some control laws will only minimize cross-track error, others both heading and cross-track error.
Step 4: Compute control law
17
errorcontrol
Compute control action based on instantaneous error
Different laws have different trade-offs, make different assumptions,
look at different errors
u = K(e)

Different control laws
18
1. PID control
2. Pure-pursuit control
3. Lyapunov control
4. LQR
5. MPC

19
Proportional–integral–derivative (PID) controller
Used widely in industrial control from 1900s Do not try this
with PID!!!Regulate temp, press, speed etc
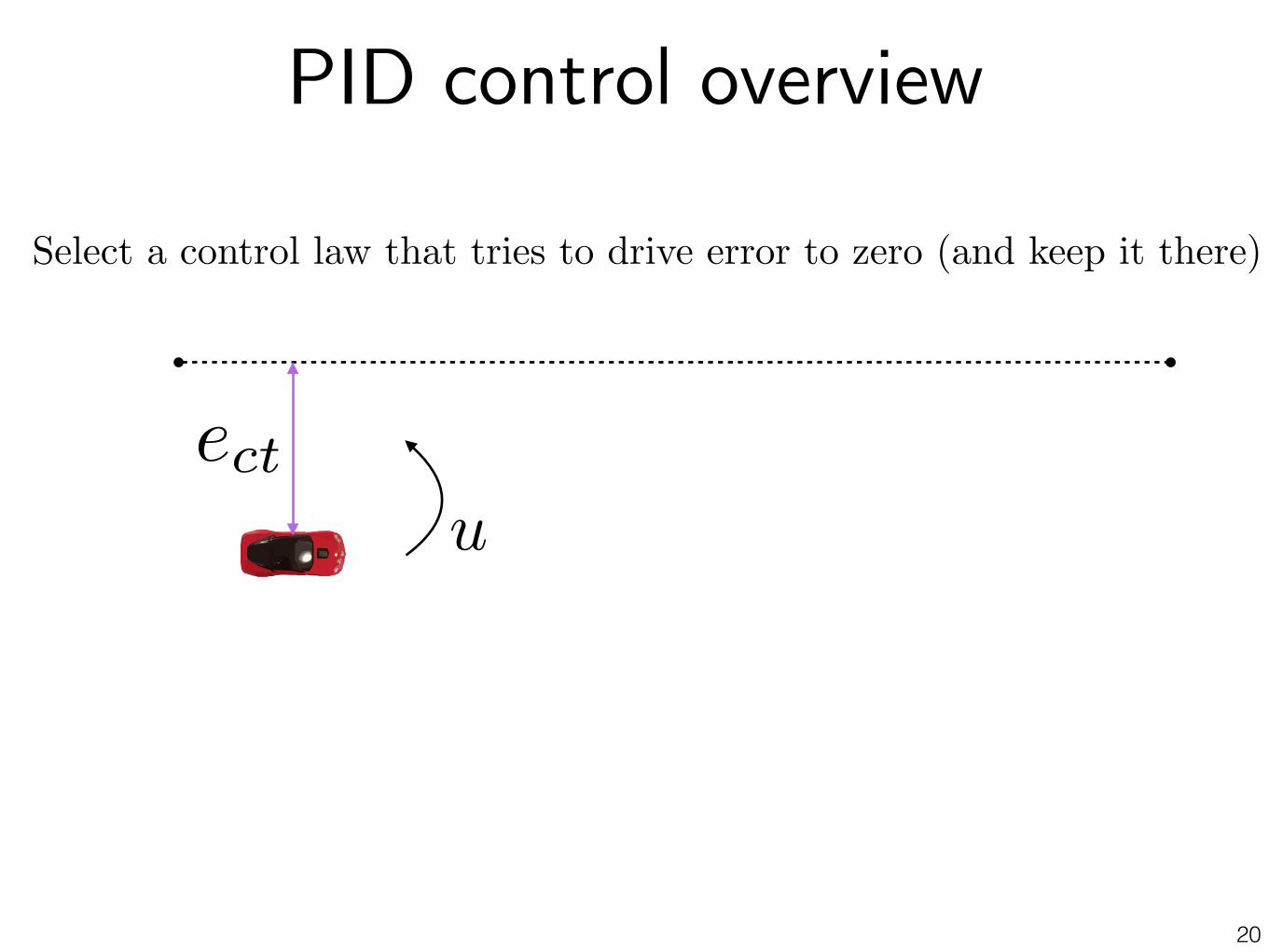
PID control overview
20
ectu
Select a control law that tries to drive error to zero (and keep it there)
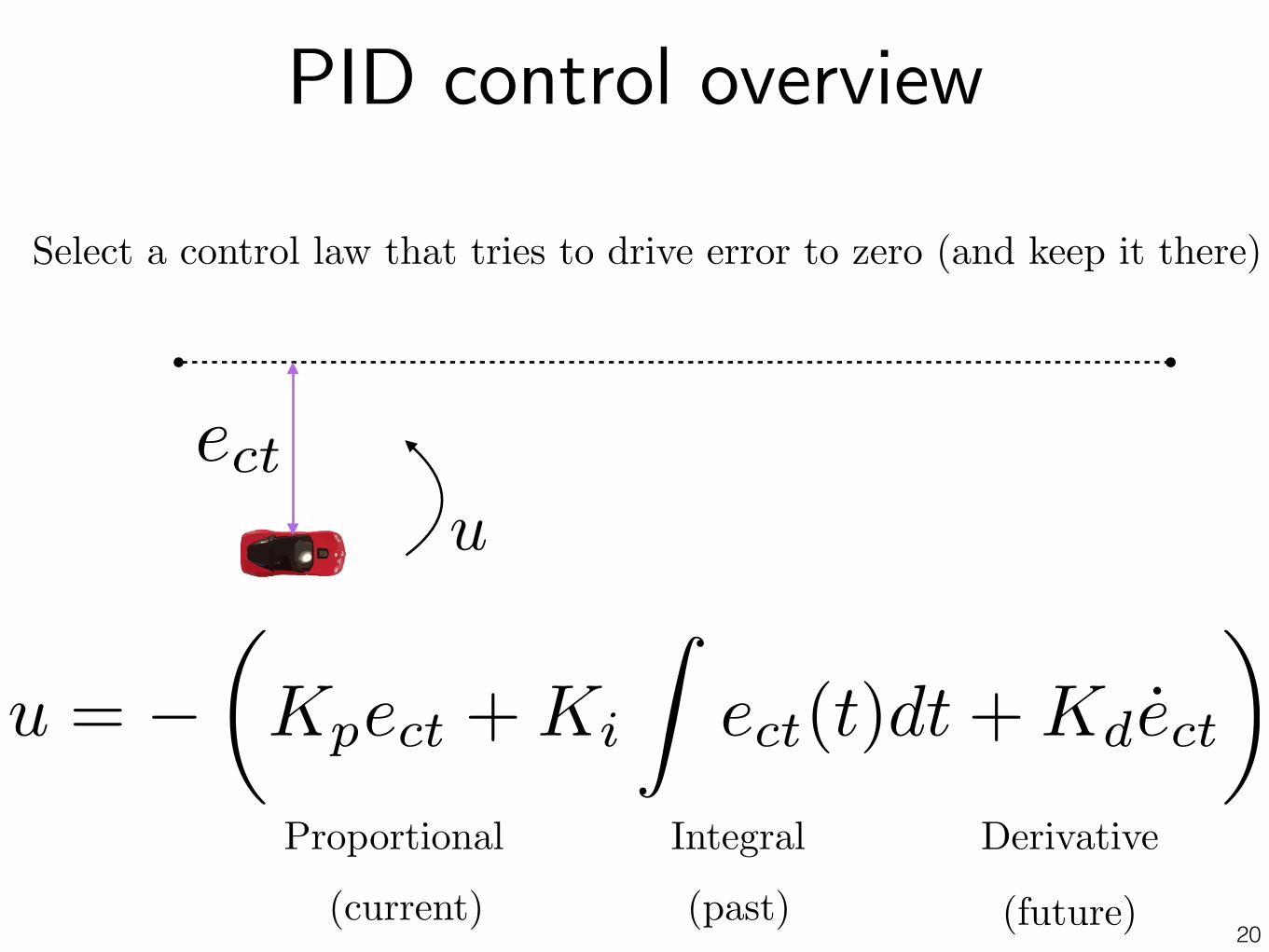
PID control overview
20
ectu
Select a control law that tries to drive error to zero (and keep it there)
Proportional Integral Derivative
u = �✓Kpect +Ki
Zect(t)dt+Kdect
◆
(current) (past) (future)

Some intuition …
21
Proportional Integral Derivative
u = �✓Kpect +Ki
Zect(t)dt+Kdect
◆
(current) (past) (future)
Proportional - get rid of the current error!
Integral - if I am accumulating error, try harder!
Derivative - if I am going to overshoot, slow down!
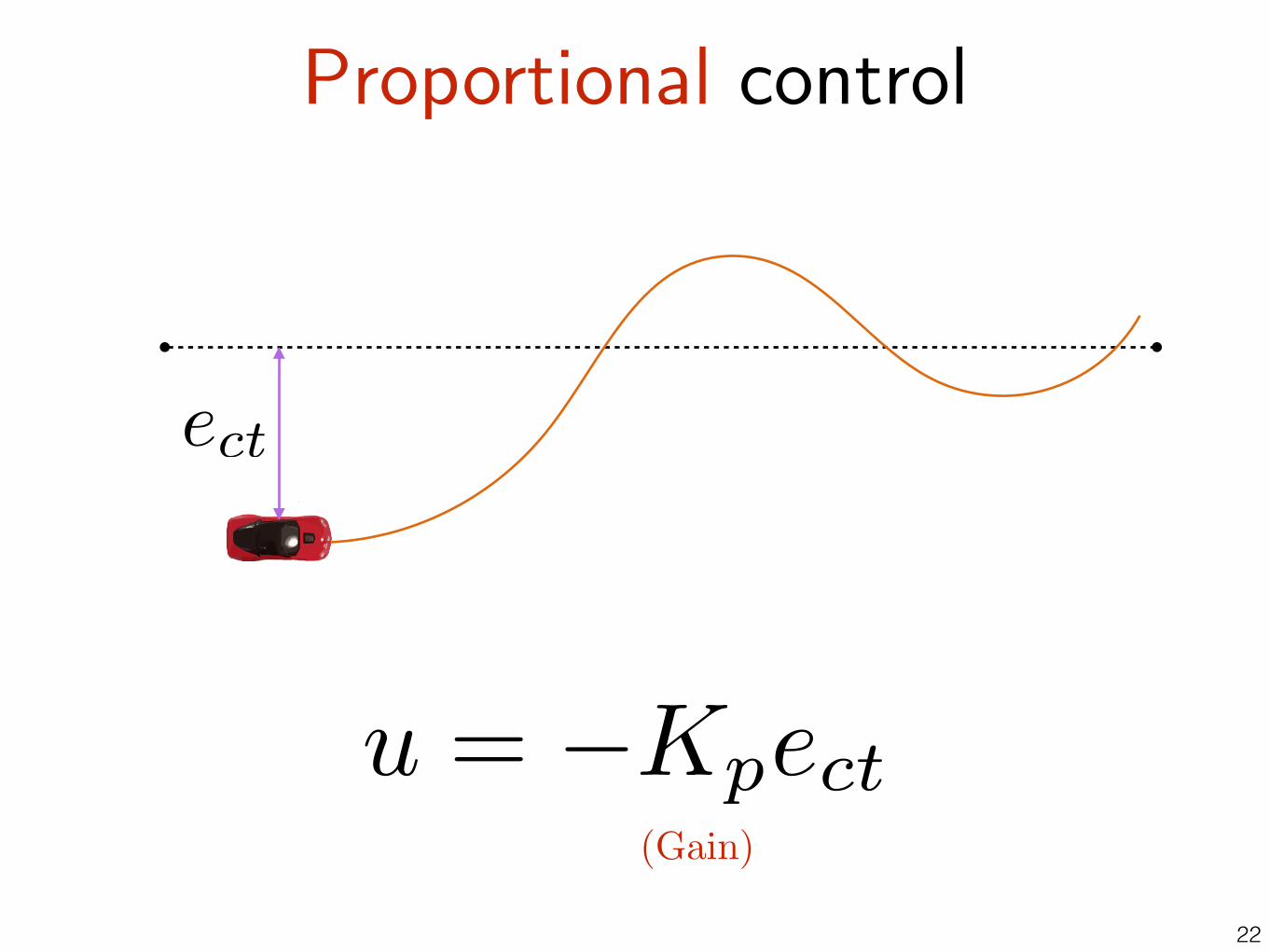
Proportional control
22
ect
u = �Kpect(Gain)

Proportional control
22
ect
u = �Kpect
ect < 0, u > 0
(Gain)
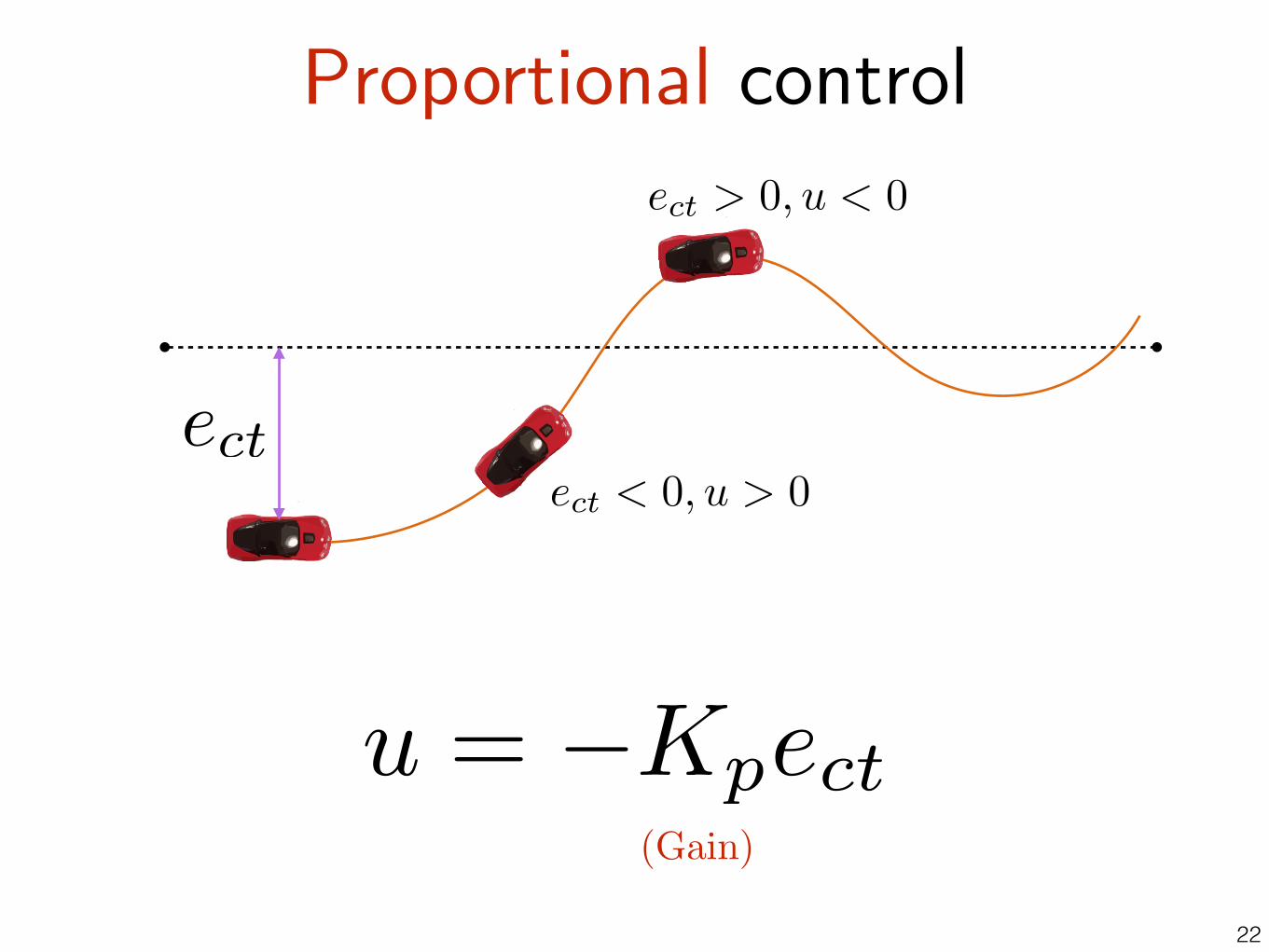
Proportional control
22
ect
u = �Kpect
ect < 0, u > 0
ect > 0, u < 0
(Gain)

The proportional gain matters!
23
ect
What happens when gain is low?

The proportional gain matters!
23
ect
What happens when gain is low?

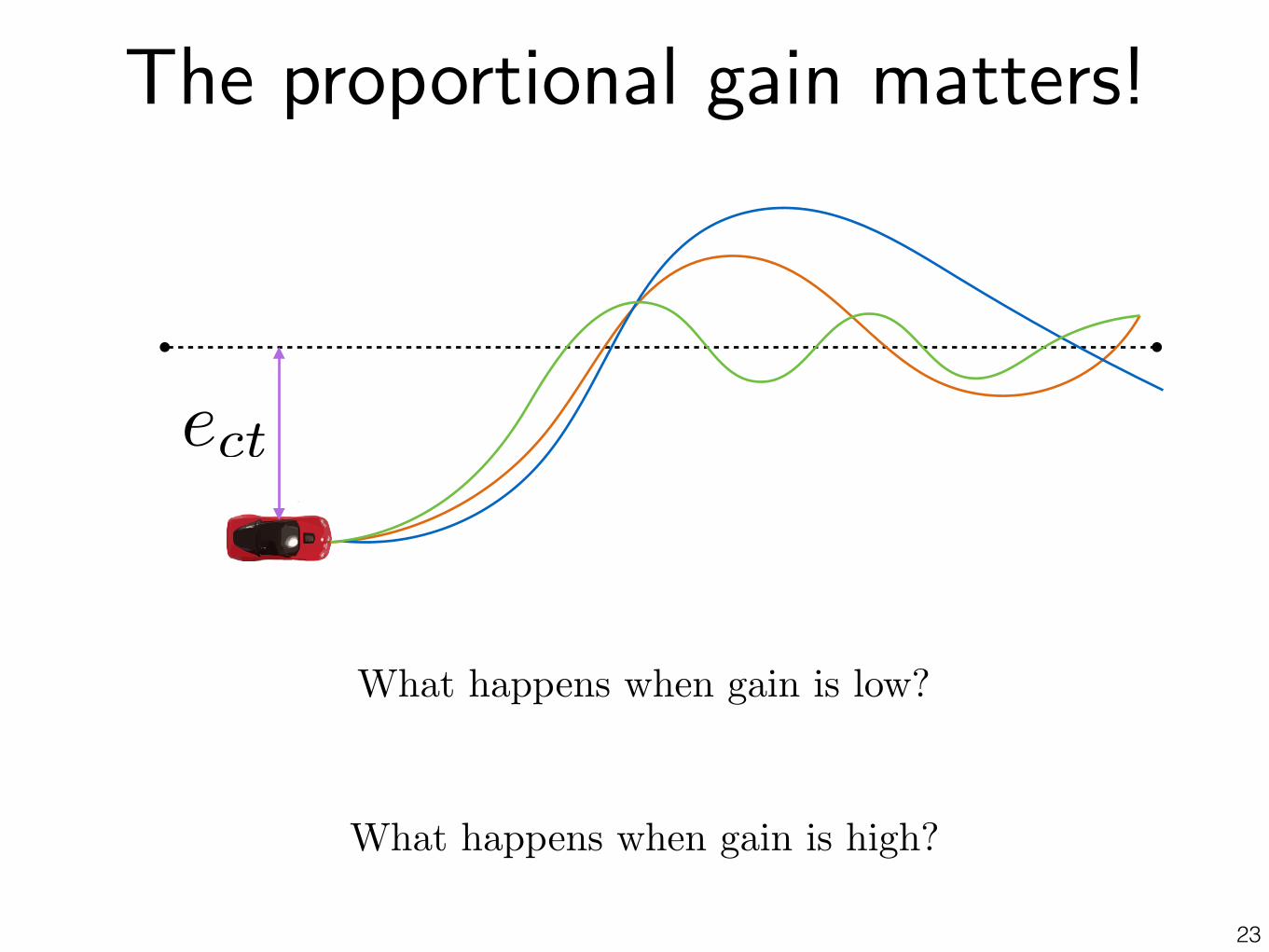
The proportional gain matters!
23
ect
What happens when gain is low?
What happens when gain is high?
The proportional gain matters!
23
ect
What happens when gain is low?
What happens when gain is high?

Proportional term
24
What happens when gain is too high?
ect
� umax
Kp

Proportional term
24
What happens when gain is too high?
ect
� umax
Kp

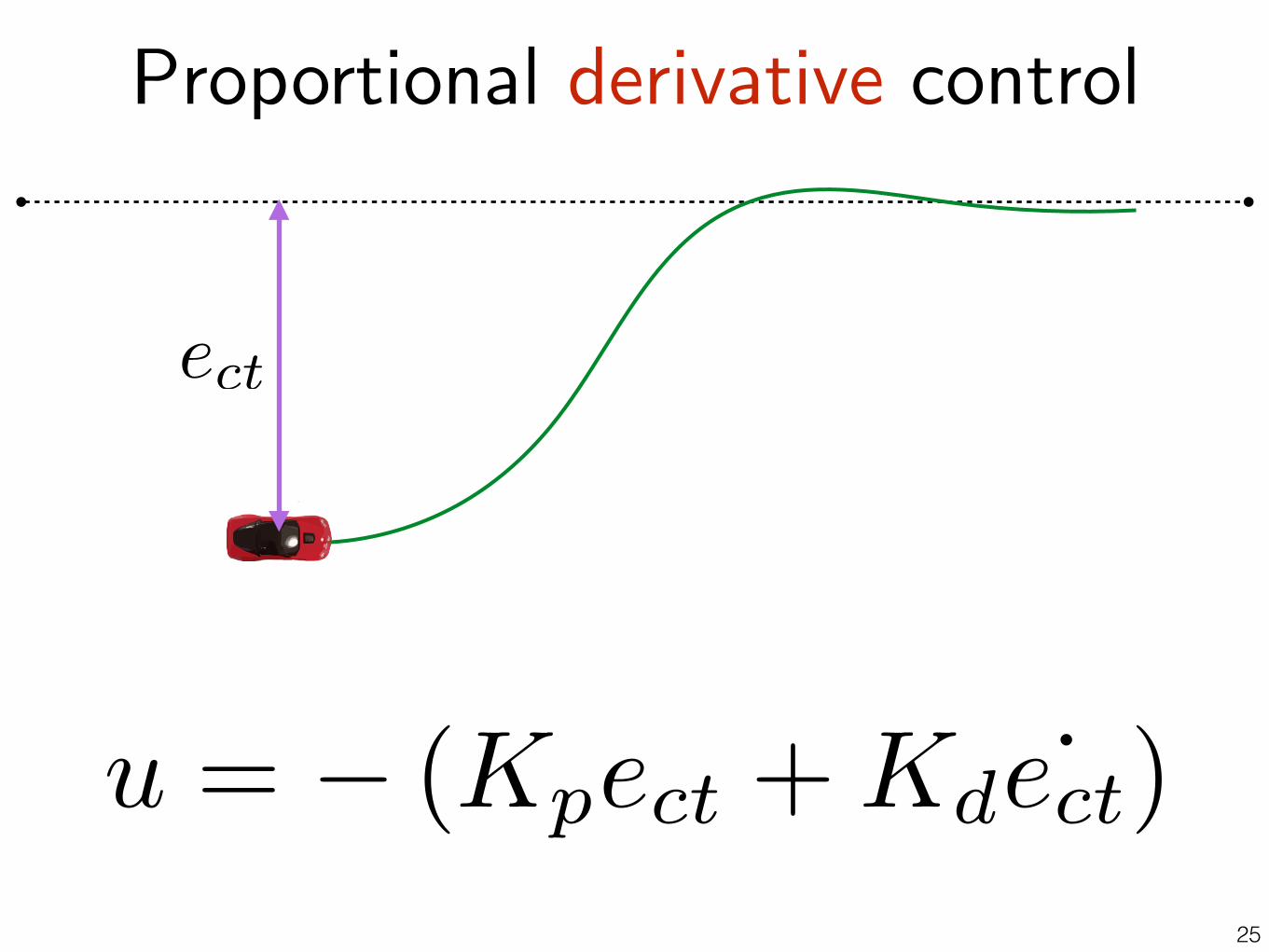
Proportional derivative control
25
ect
u = � (Kpect +Kd ˙ect)
Proportional derivative control
25
ect
u = � (Kpect +Kd ˙ect)
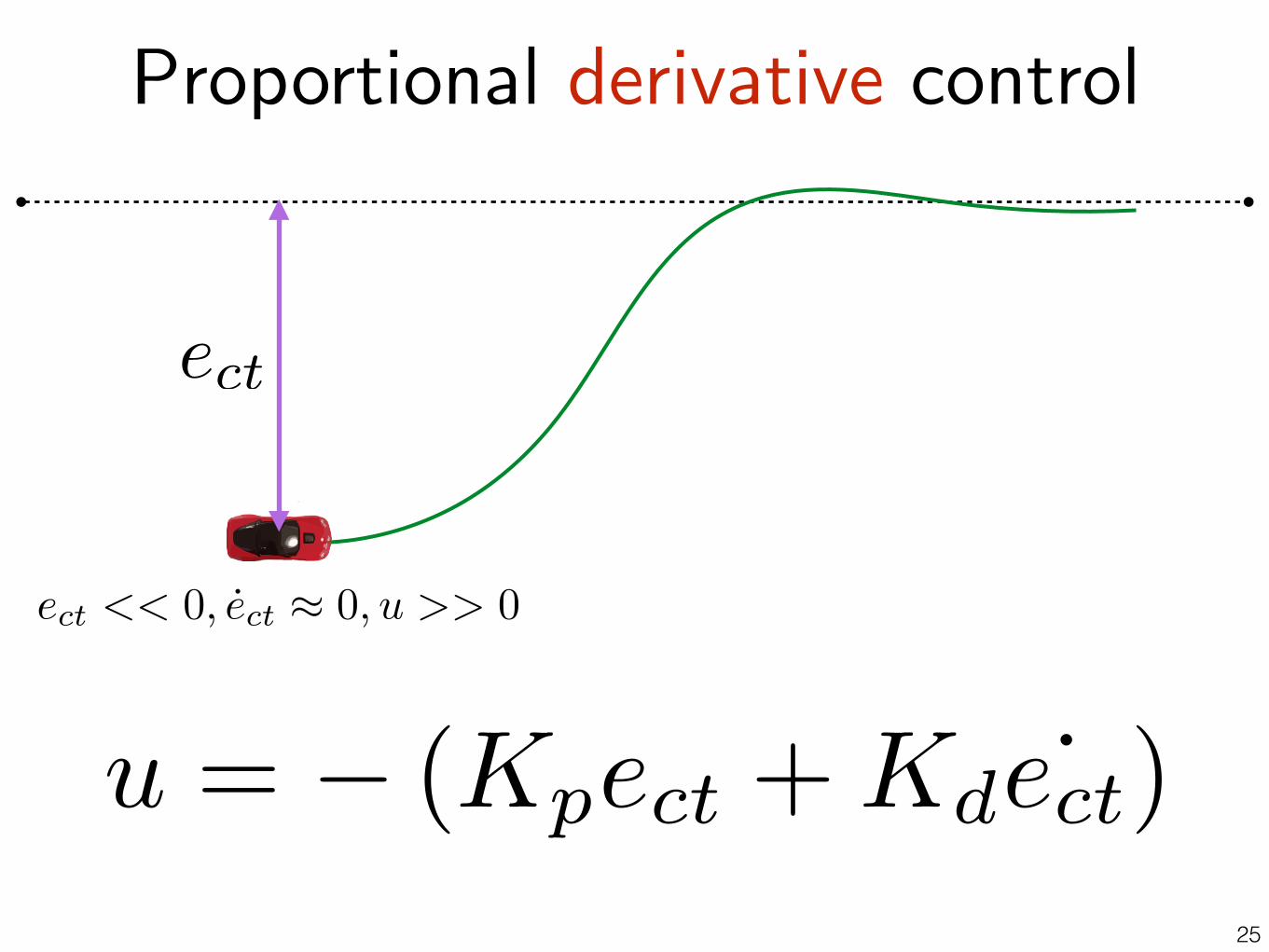
Proportional derivative control
25
ect
u = � (Kpect +Kd ˙ect)
ect << 0, ect ⇡ 0, u >> 0
Proportional derivative control
25
ect
u = � (Kpect +Kd ˙ect)
ect << 0, ect ⇡ 0, u >> 0
ect < 0, ect > 0, u ⇡ 0

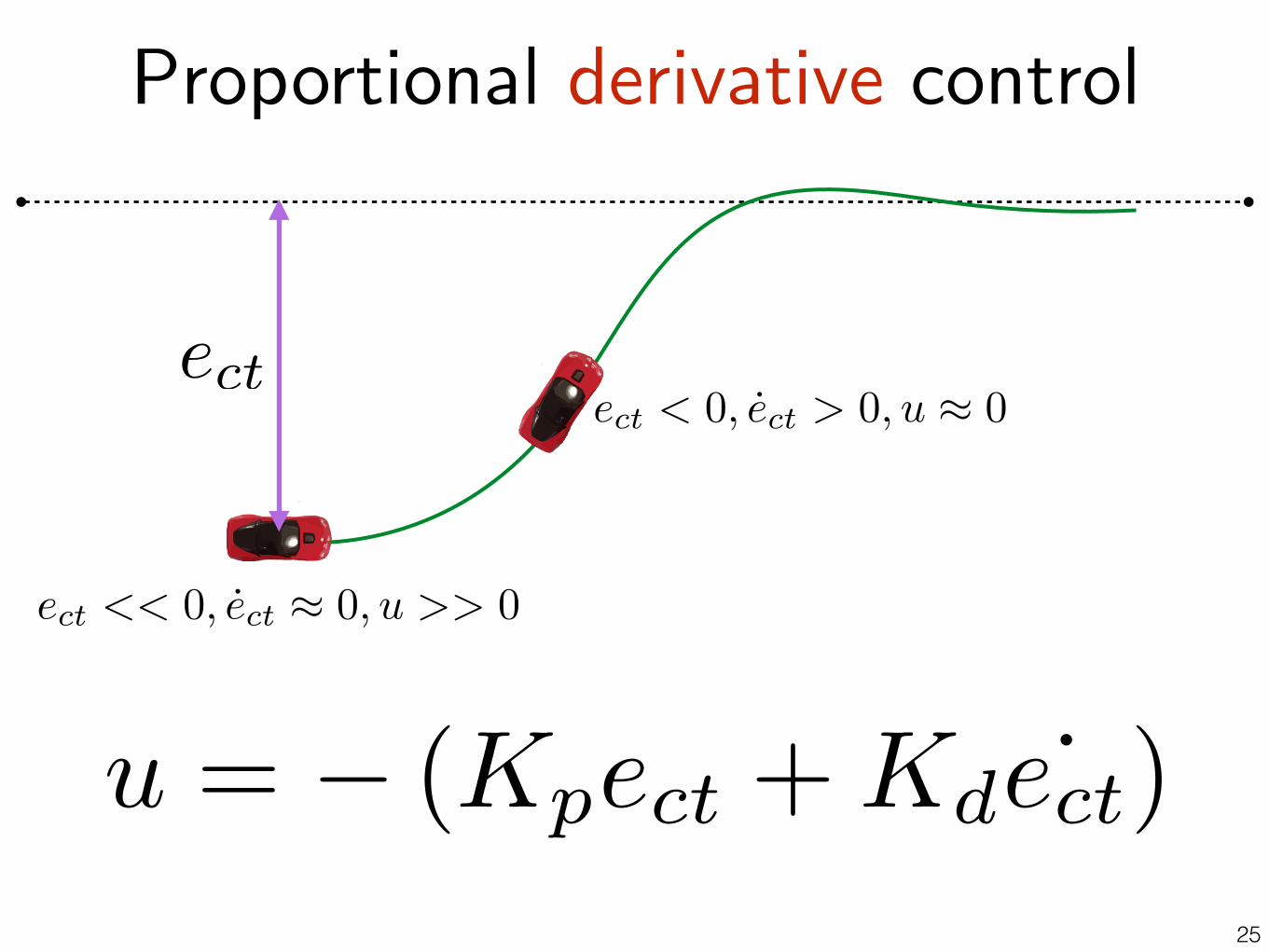
Proportional derivative control
25
ect
u = � (Kpect +Kd ˙ect)
ect << 0, ect ⇡ 0, u >> 0
ect < 0, ect > 0, u ⇡ 0
ect ⇡ 0, ect > 0, u < 0

How do you evaluate the derivative term?
26
How do you evaluate the derivative term?
26
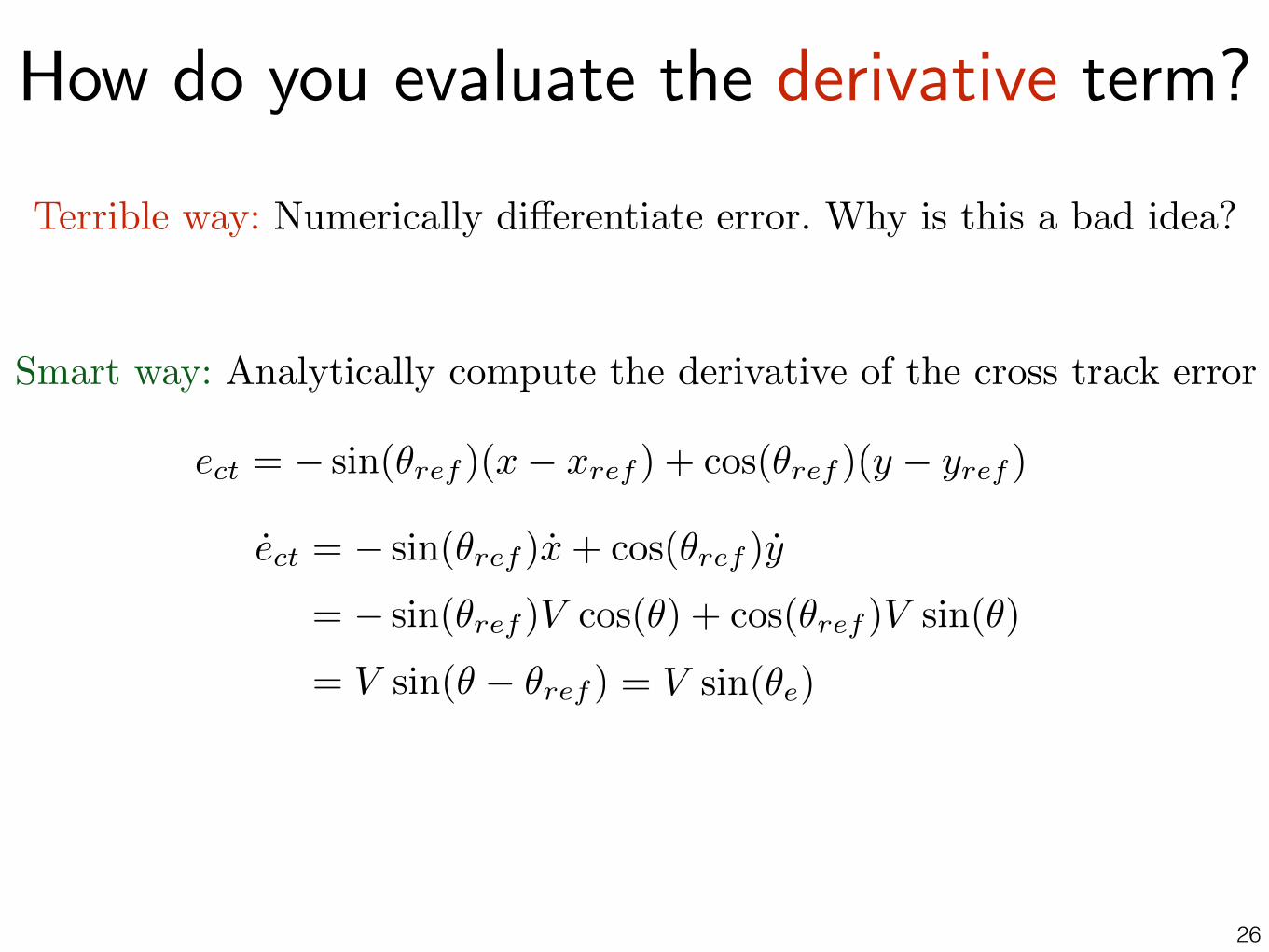
Terrible way: Numerically differentiate error. Why is this a bad idea?
How do you evaluate the derivative term?
26
Terrible way: Numerically differentiate error. Why is this a bad idea?
Smart way: Analytically compute the derivative of the cross track error

How do you evaluate the derivative term?
26
Terrible way: Numerically differentiate error. Why is this a bad idea?
Smart way: Analytically compute the derivative of the cross track error
ect = � sin(✓ref )(x� xref ) + cos(✓ref )(y � yref )
How do you evaluate the derivative term?
26
Terrible way: Numerically differentiate error. Why is this a bad idea?
Smart way: Analytically compute the derivative of the cross track error
ect = � sin(✓ref )x+ cos(✓ref )y
= � sin(✓ref )V cos(✓) + cos(✓ref )V sin(✓)
= V sin(✓ � ✓ref ) = V sin(✓e)
ect = � sin(✓ref )(x� xref ) + cos(✓ref )(y � yref )

How do you evaluate the derivative term?
26
Terrible way: Numerically differentiate error. Why is this a bad idea?
Smart way: Analytically compute the derivative of the cross track error
ect = � sin(✓ref )x+ cos(✓ref )y
= � sin(✓ref )V cos(✓) + cos(✓ref )V sin(✓)
= V sin(✓ � ✓ref ) = V sin(✓e)
ect = � sin(✓ref )(x� xref ) + cos(✓ref )(y � yref )
u = � (Kpect +KdV sin ✓e)New control law! Penalize error in cross track and in heading

Proportional integral control
27
ect
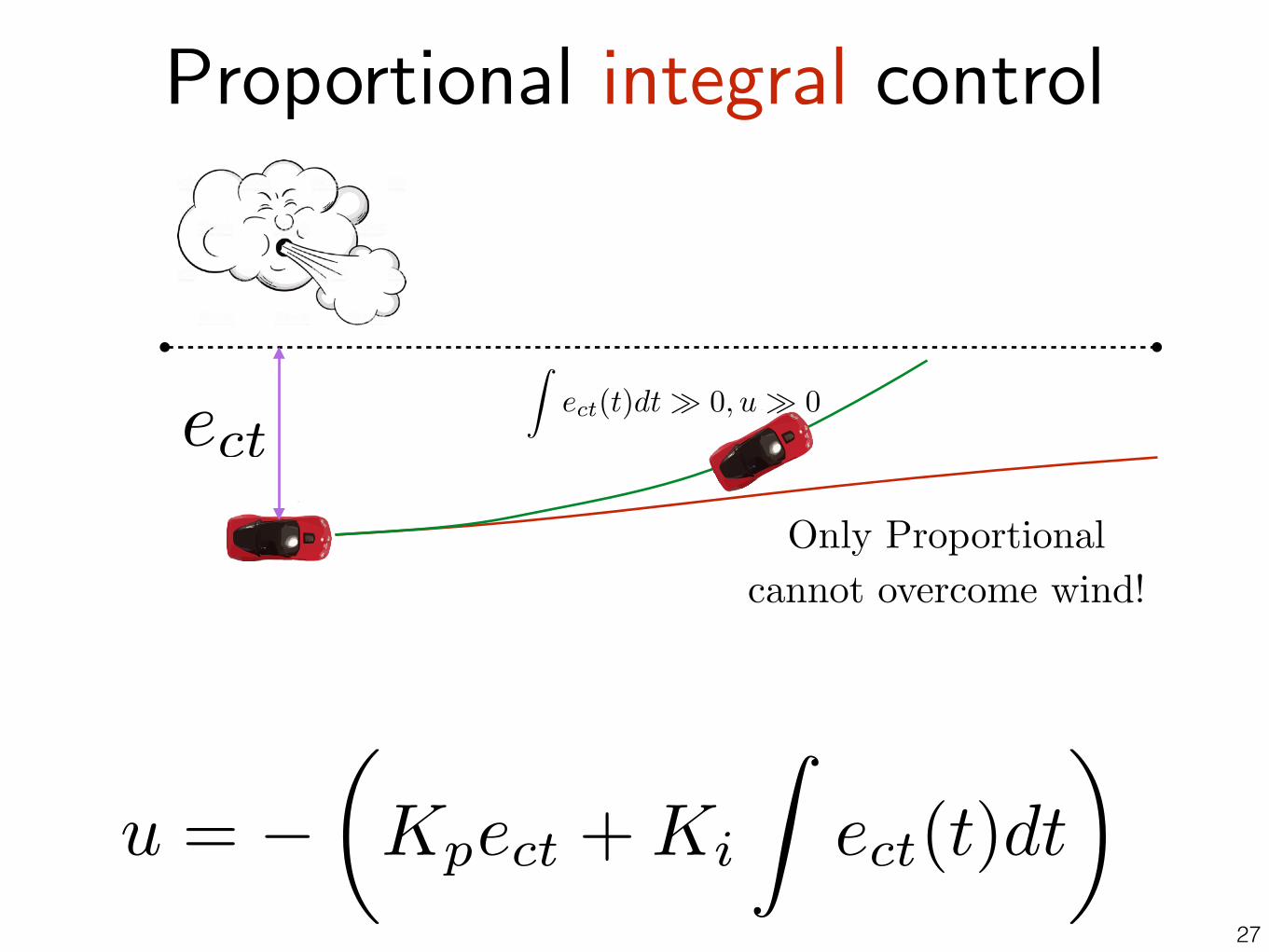
u = �✓Kpect +Ki
Zect(t)dt
◆

Proportional integral control
27
ect
u = �✓Kpect +Ki
Zect(t)dt
◆
Only Proportional cannot overcome wind!
Proportional integral control
27
ect
u = �✓Kpect +Ki
Zect(t)dt
◆
Only Proportional cannot overcome wind!
Zect(t)dt � 0, u � 0

Different control laws
28
1. PID control
2. Pure-pursuit control
3. Lyapunov control
4. LQR
5. MPC

29
Pure Pursuit Control
Aerial combat in which aircraft pursues another aircraft by pointing its nose directly towards it
Similar to carrot on a stick!

30
Key Idea:
The car is always moving in a circular arc
31
L
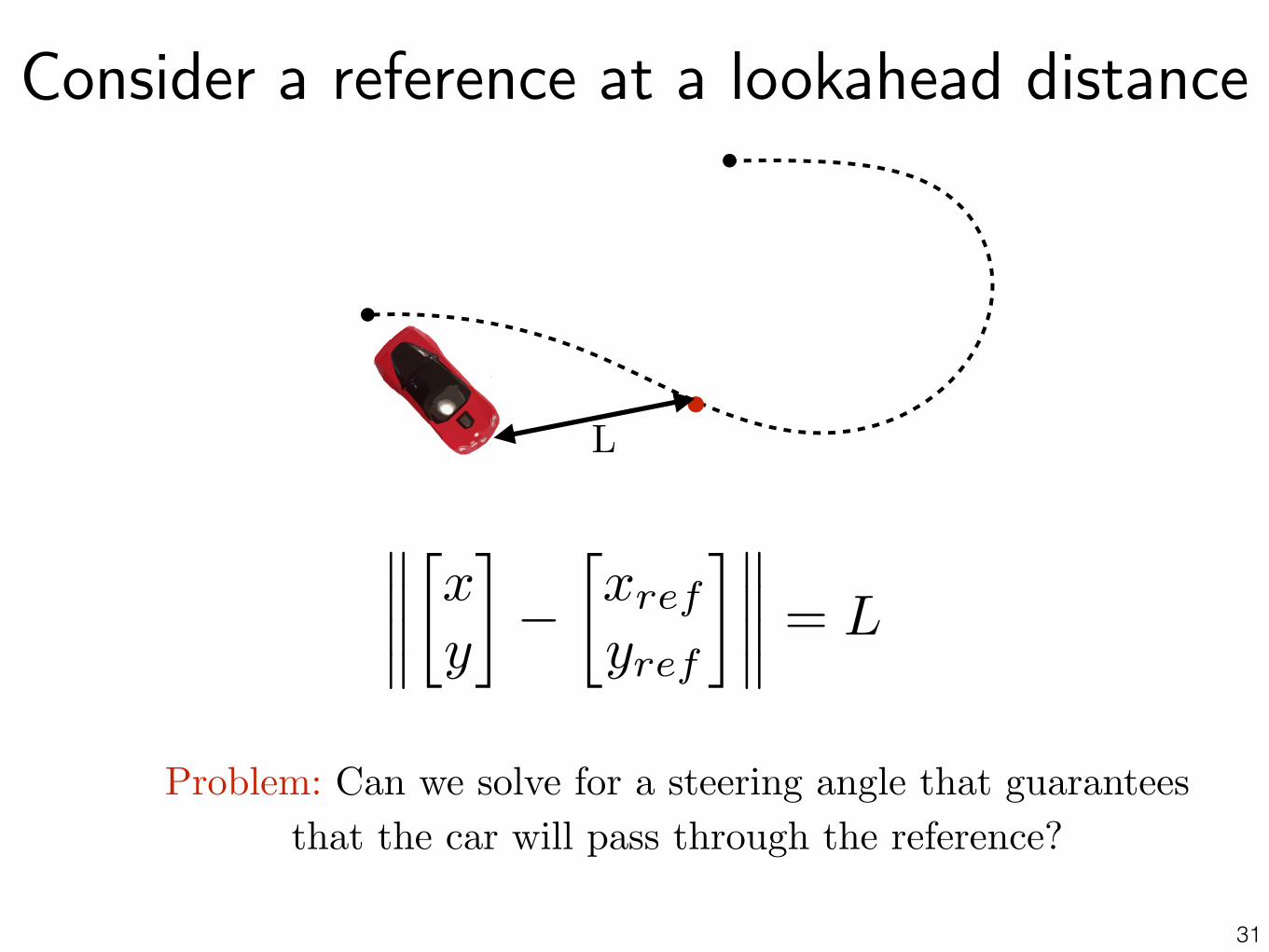
Consider a reference at a lookahead distance
Problem: Can we solve for a steering angle that guarantees that the car will pass through the reference?
����
x
y
��xref
yref
����� = L
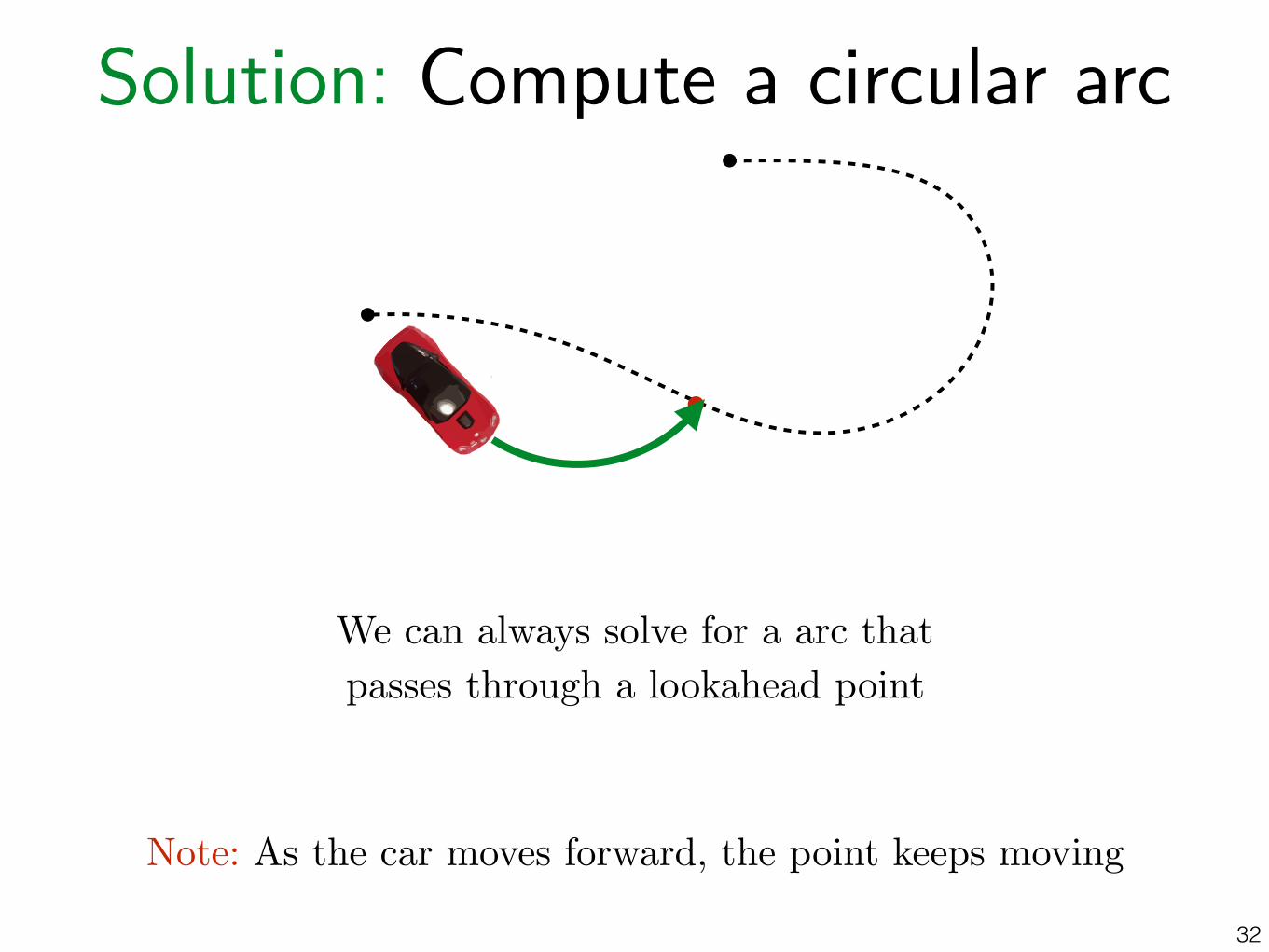
Solution: Compute a circular arc
32
We can always solve for a arc that passes through a lookahead point
Note: As the car moves forward, the point keeps moving
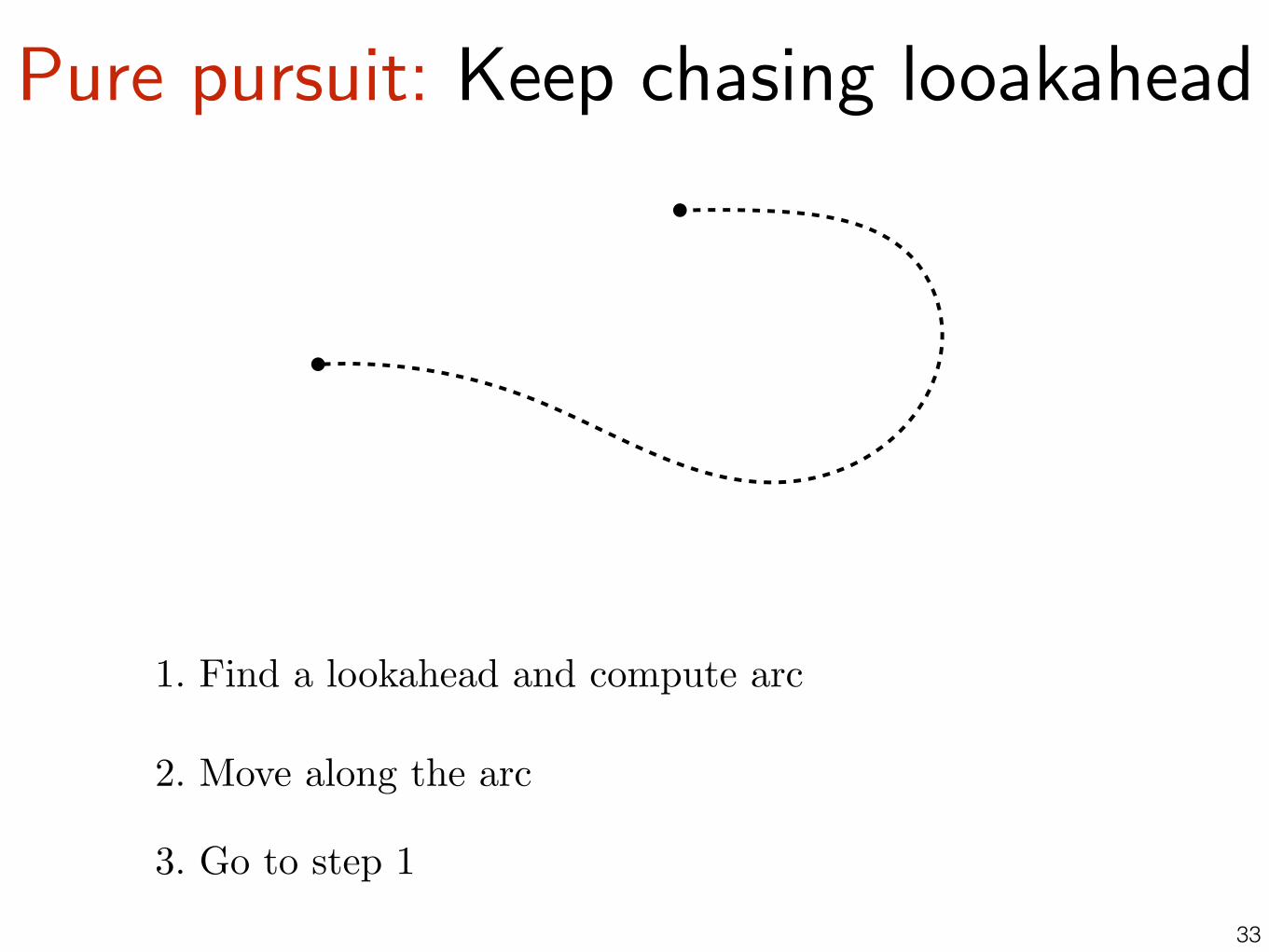
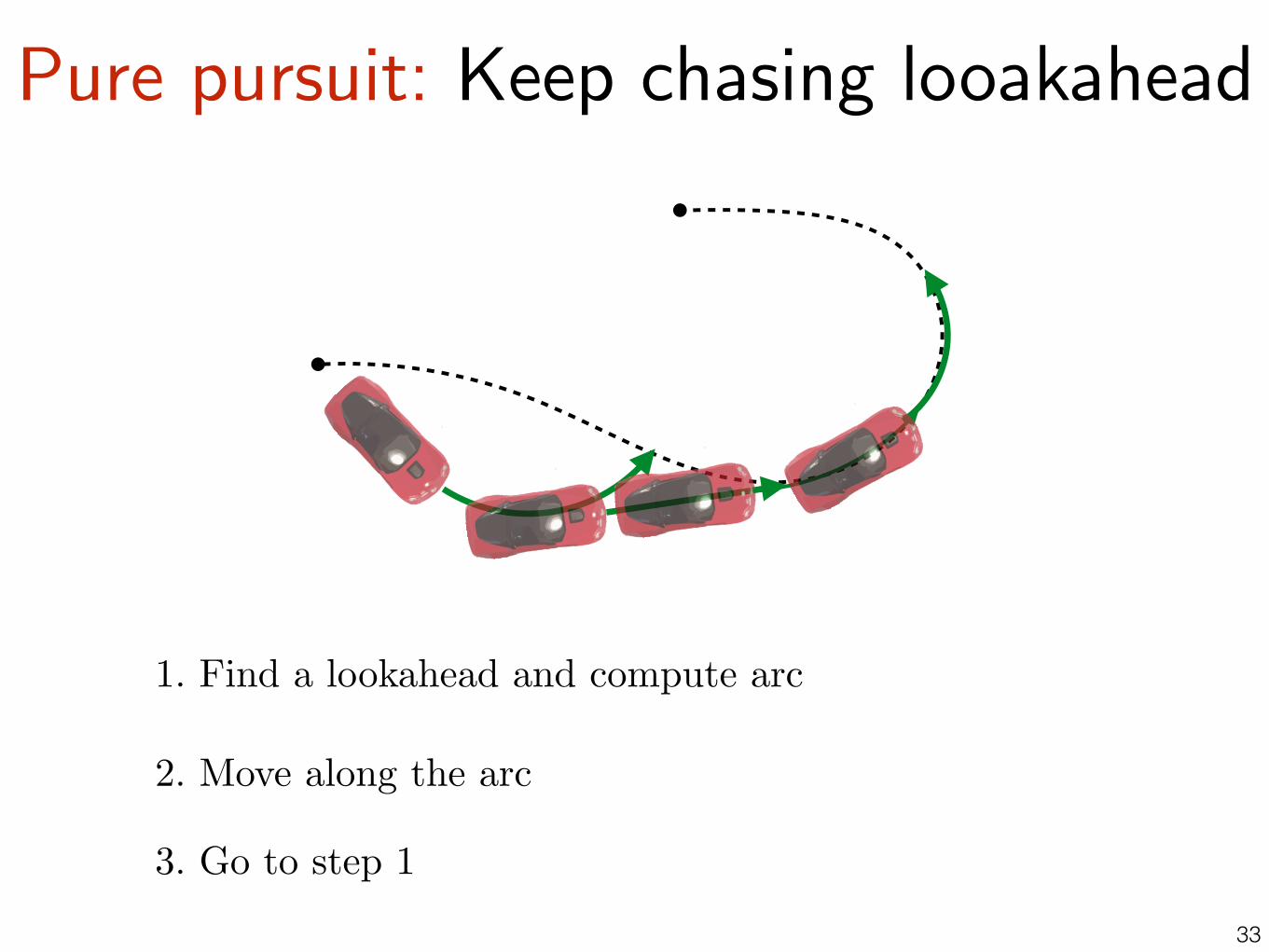
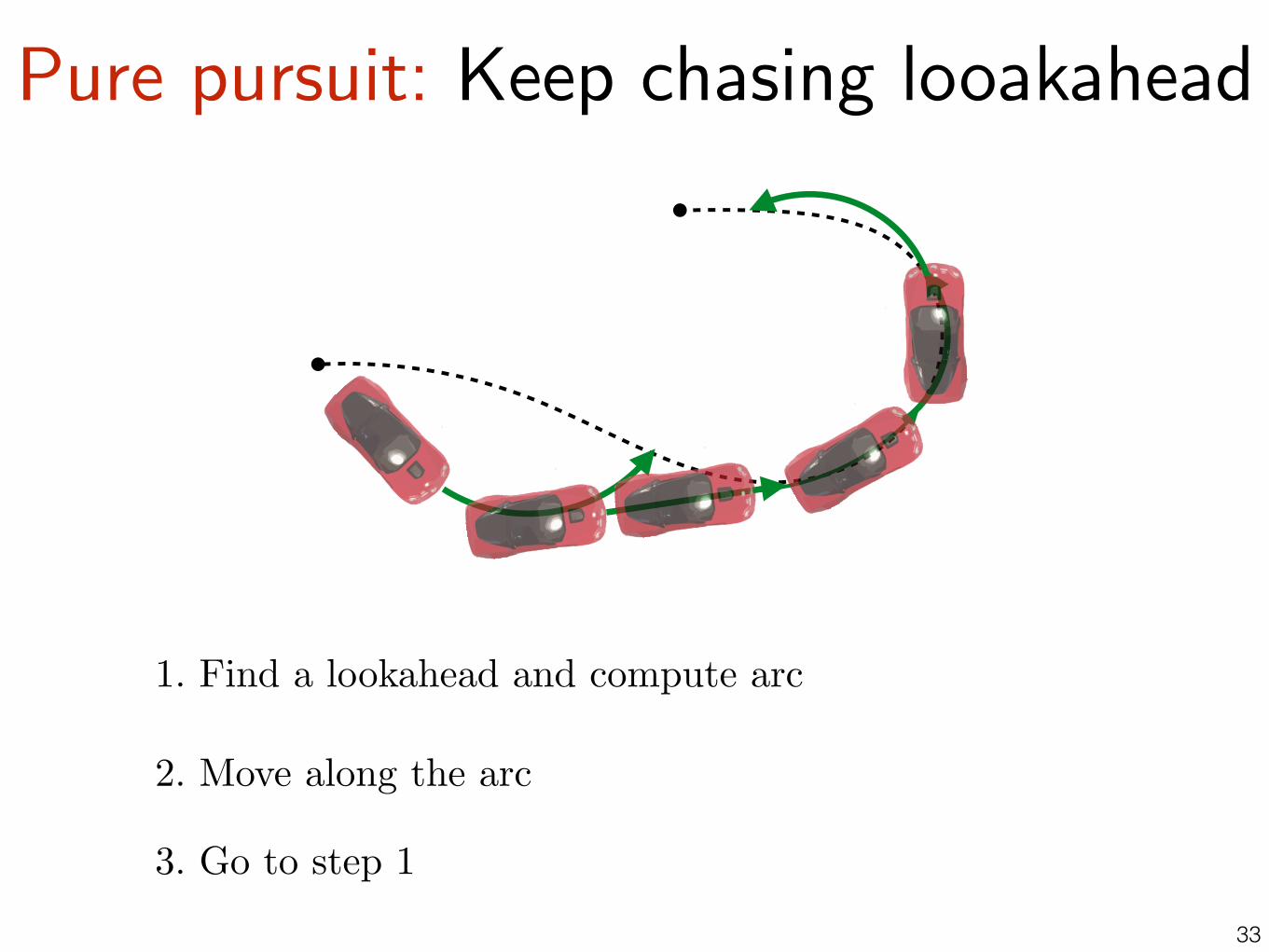
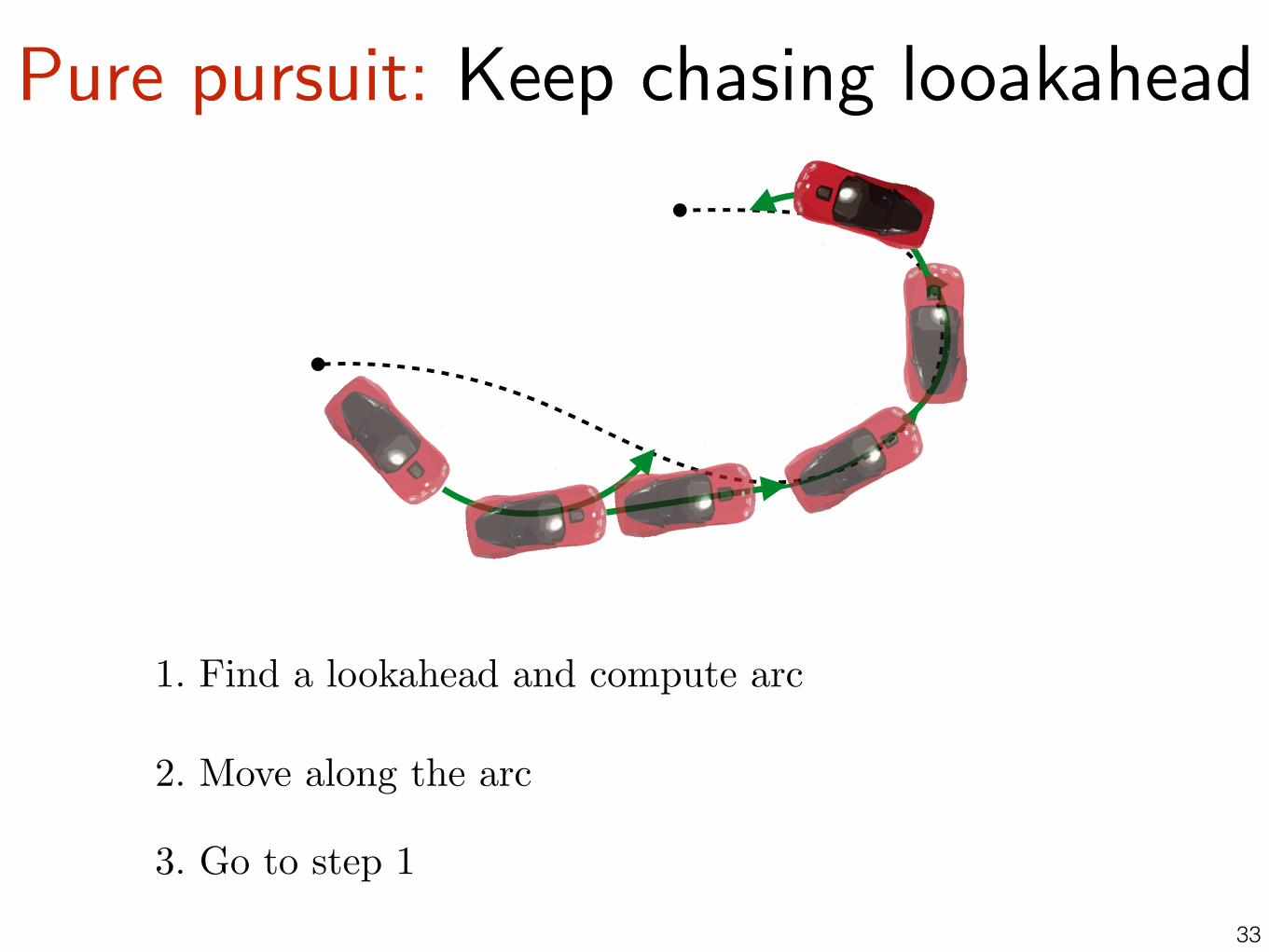
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1
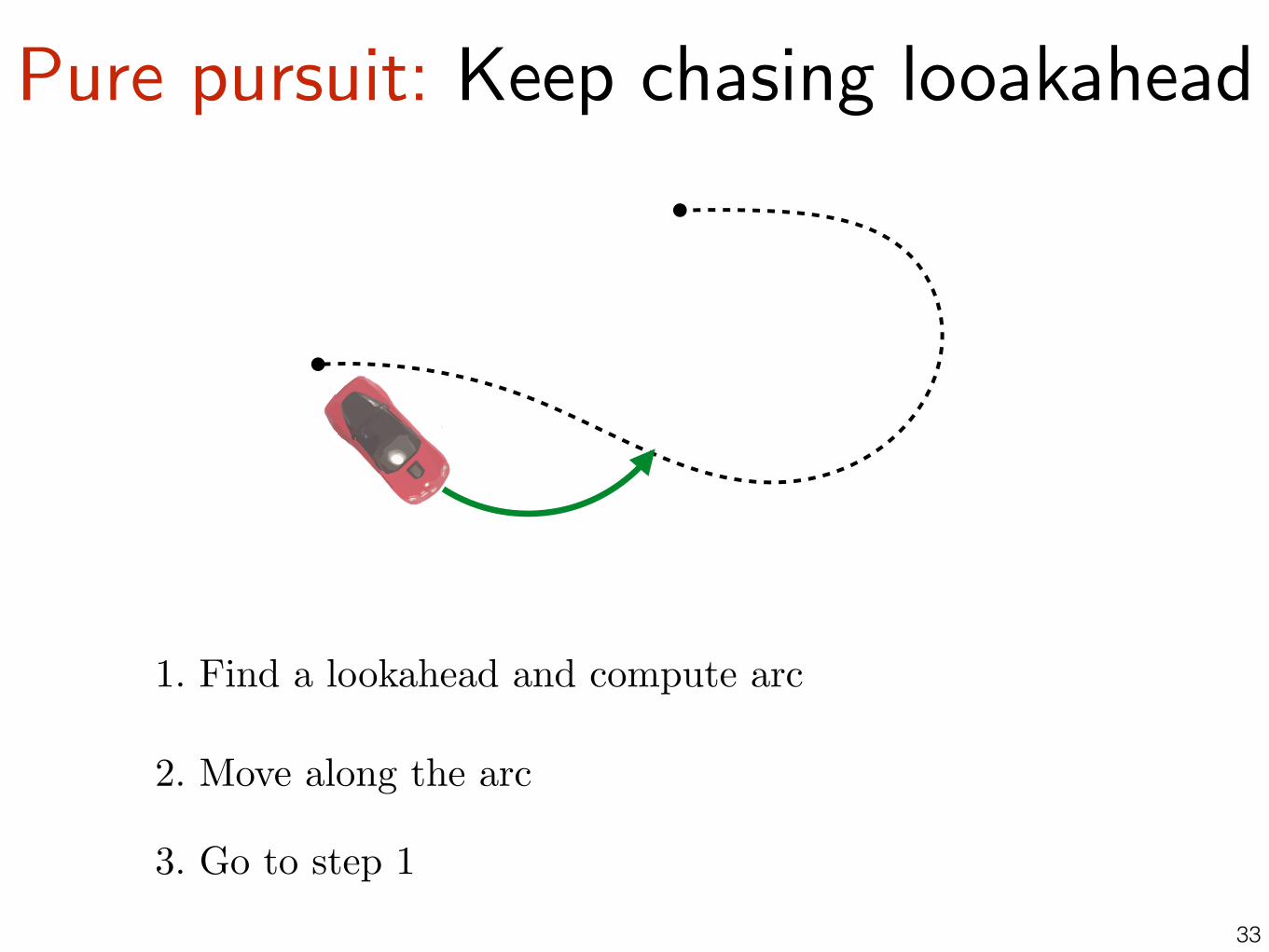
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1
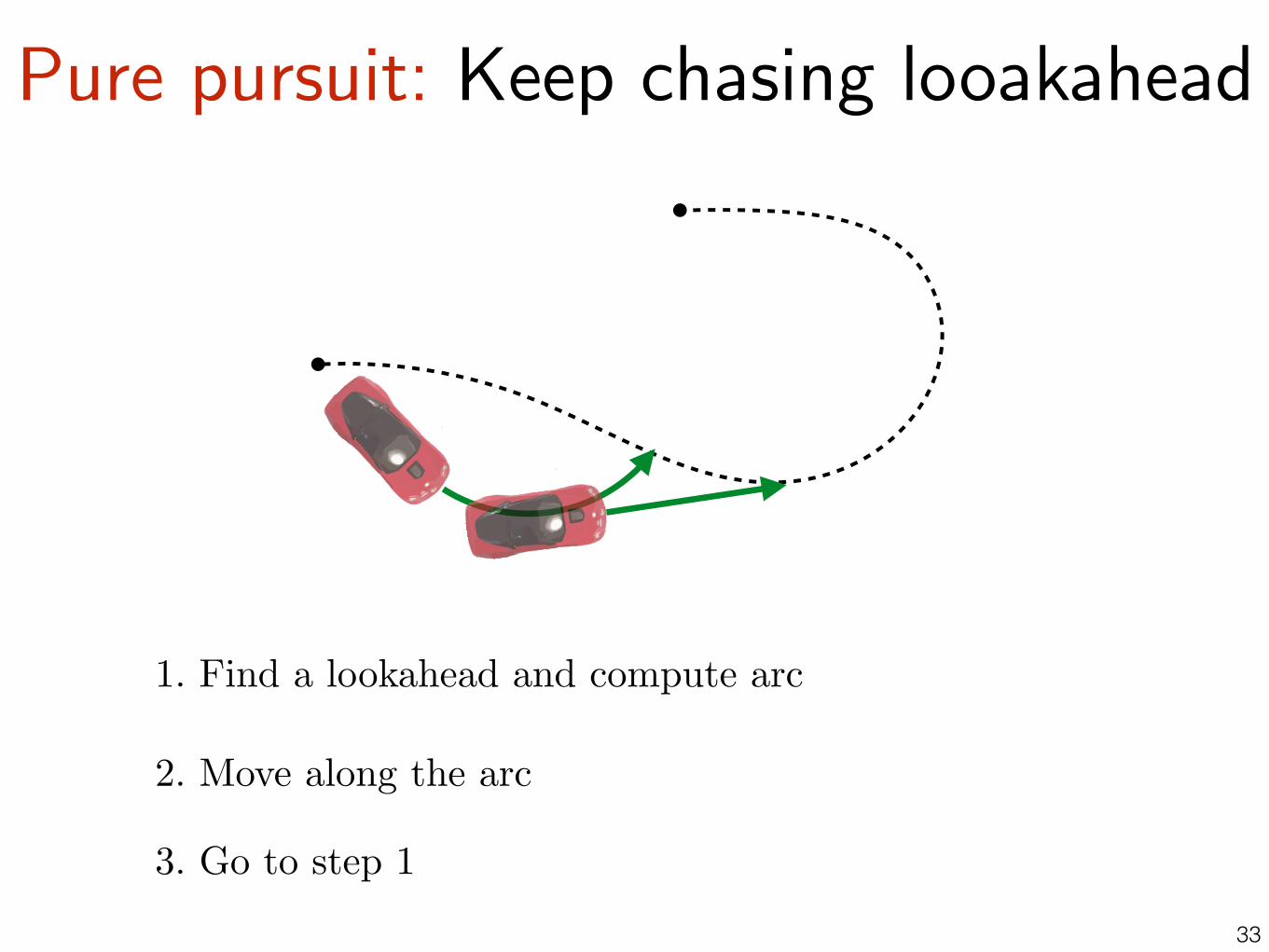
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1
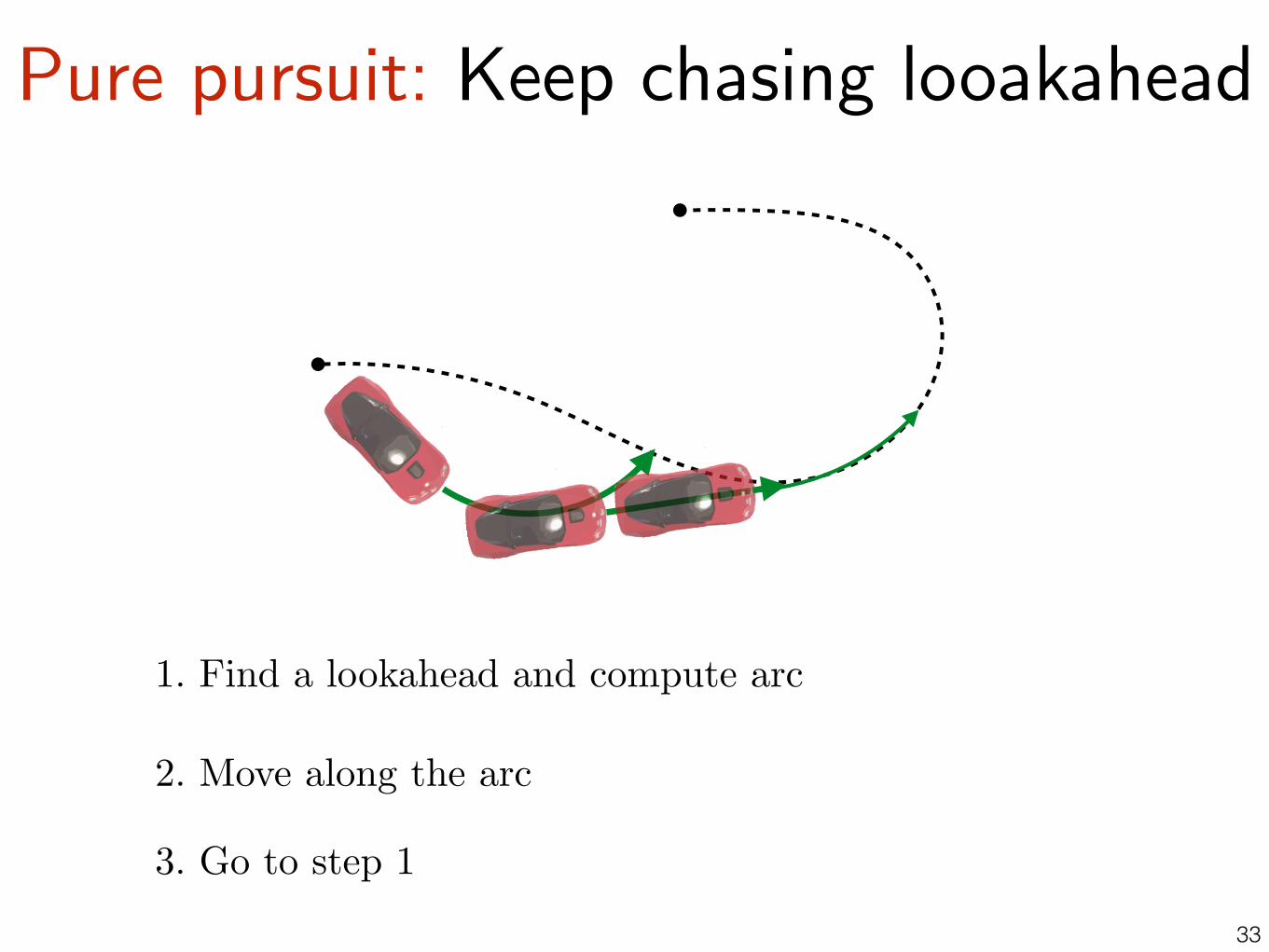
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1
Pure pursuit: Keep chasing looakahead
33
1. Find a lookahead and compute arc
2. Move along the arc
3. Go to step 1

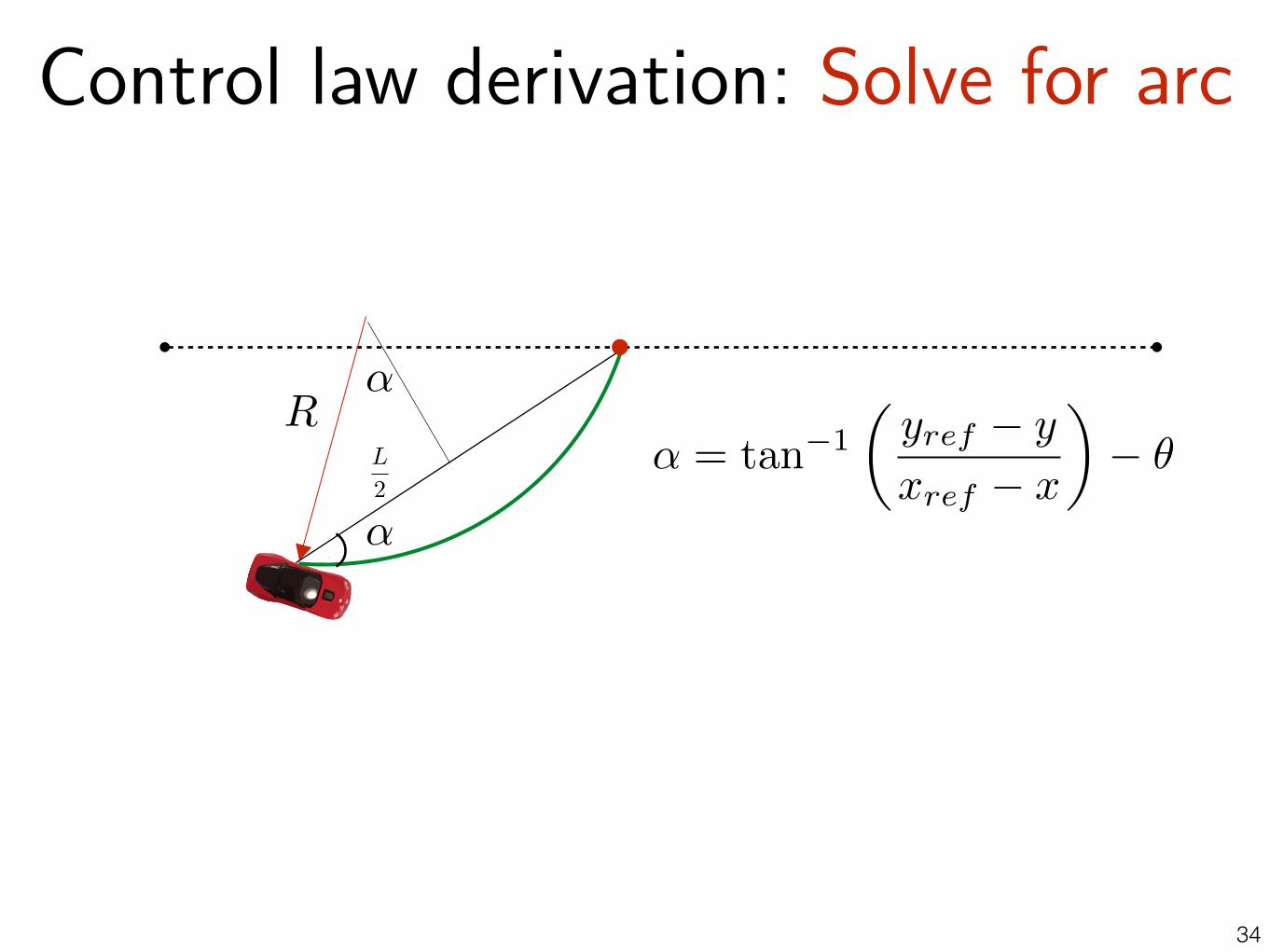
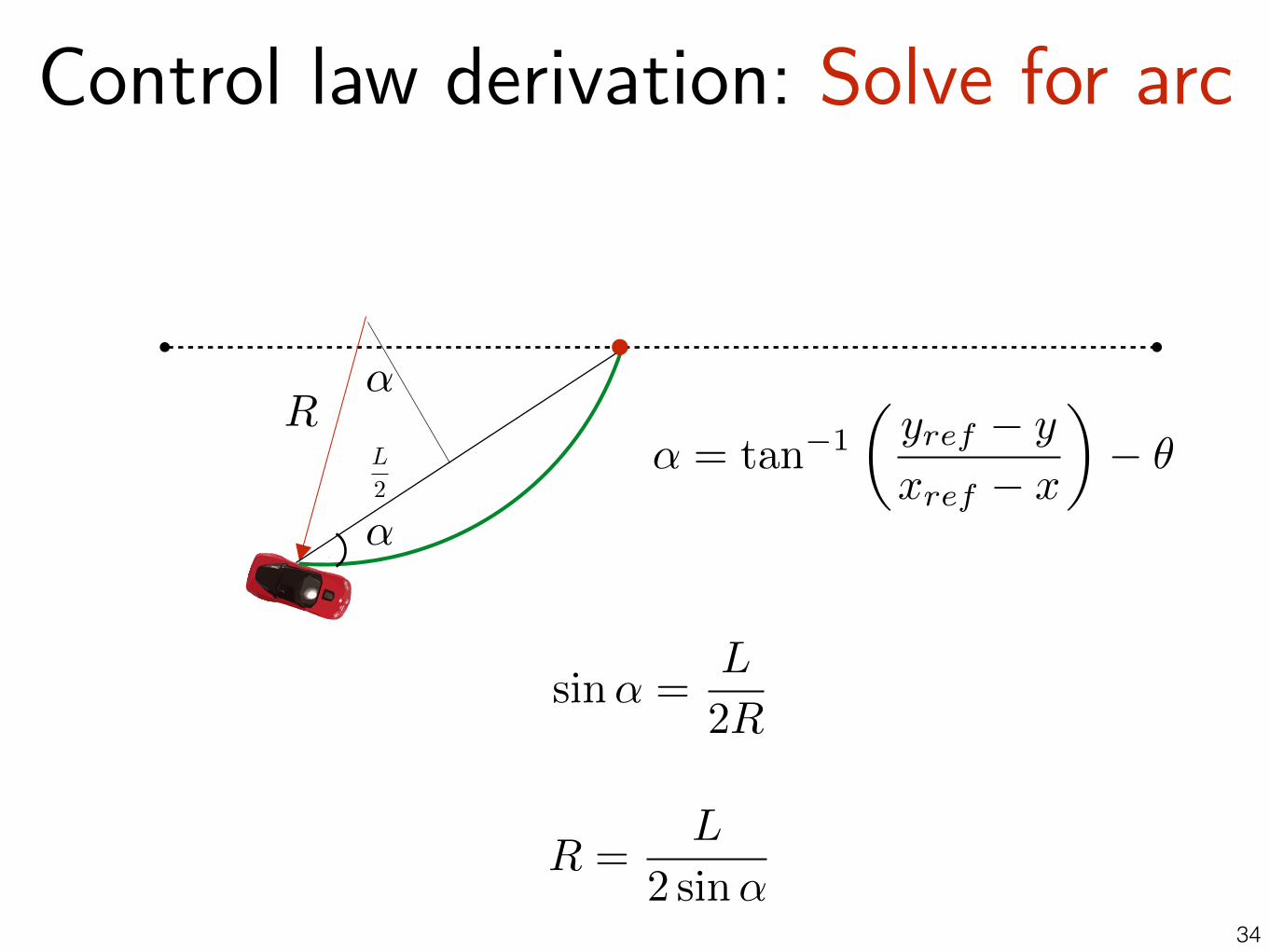
Control law derivation: Solve for arc
34
R

Control law derivation: Solve for arc
34
R
↵
L
2
↵
Control law derivation: Solve for arc
34
R
↵
L
2
↵
↵ = tan�1
✓yref � y
xref � x
◆� ✓

Control law derivation: Solve for arc
34
R
↵
L
2
↵
sin↵ =L
2R
↵ = tan�1
✓yref � y
xref � x
◆� ✓
Control law derivation: Solve for arc
34
R
↵
L
2
↵
sin↵ =L
2R
R =L
2 sin↵
↵ = tan�1
✓yref � y
xref � x
◆� ✓
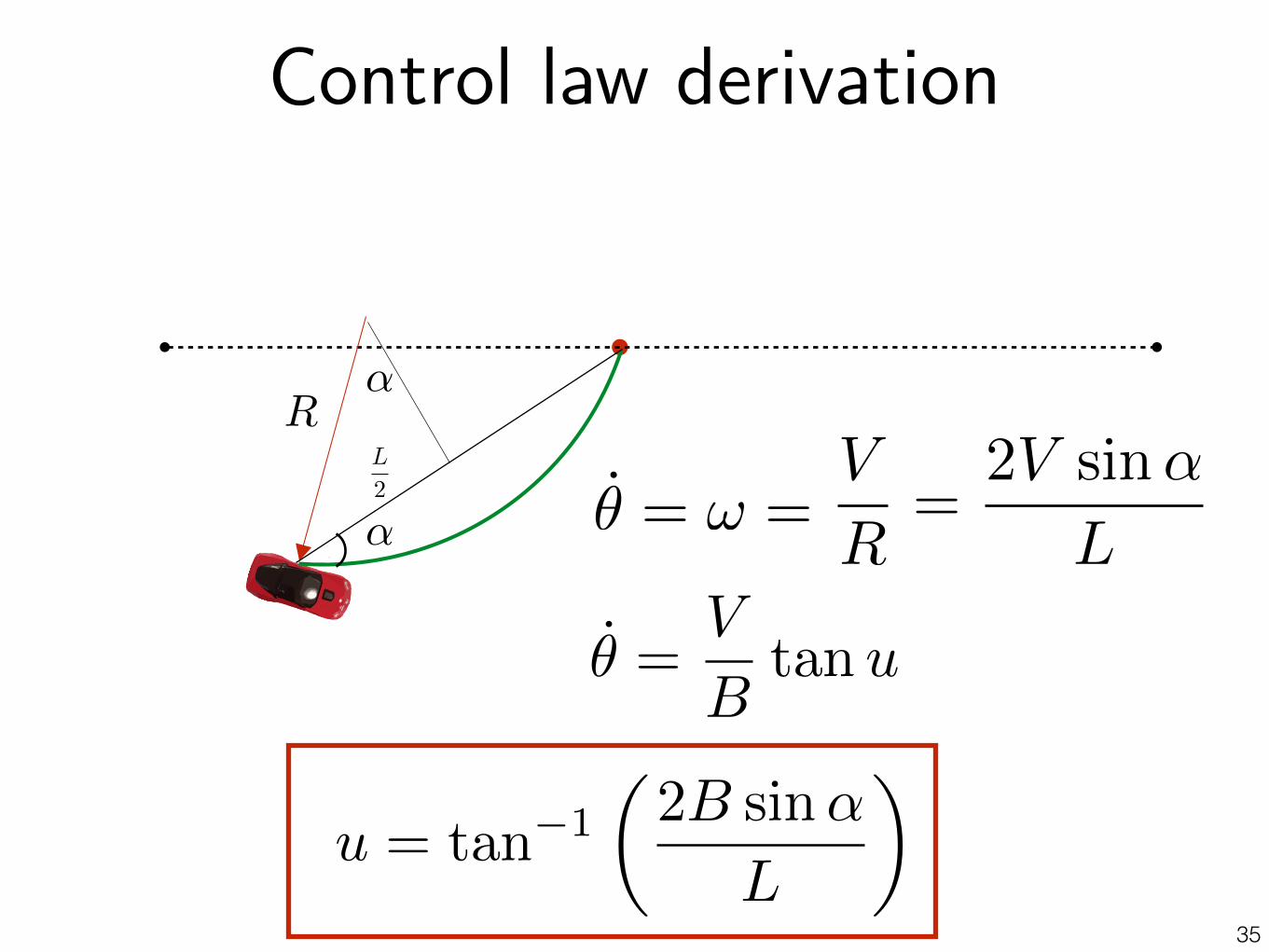
35
u = tan�1
✓2B sin↵
L
◆
Control law derivation
R
↵
L
2
↵
✓ =V
Btanu
w =V
R=
2V sin↵
L✓ = ! =

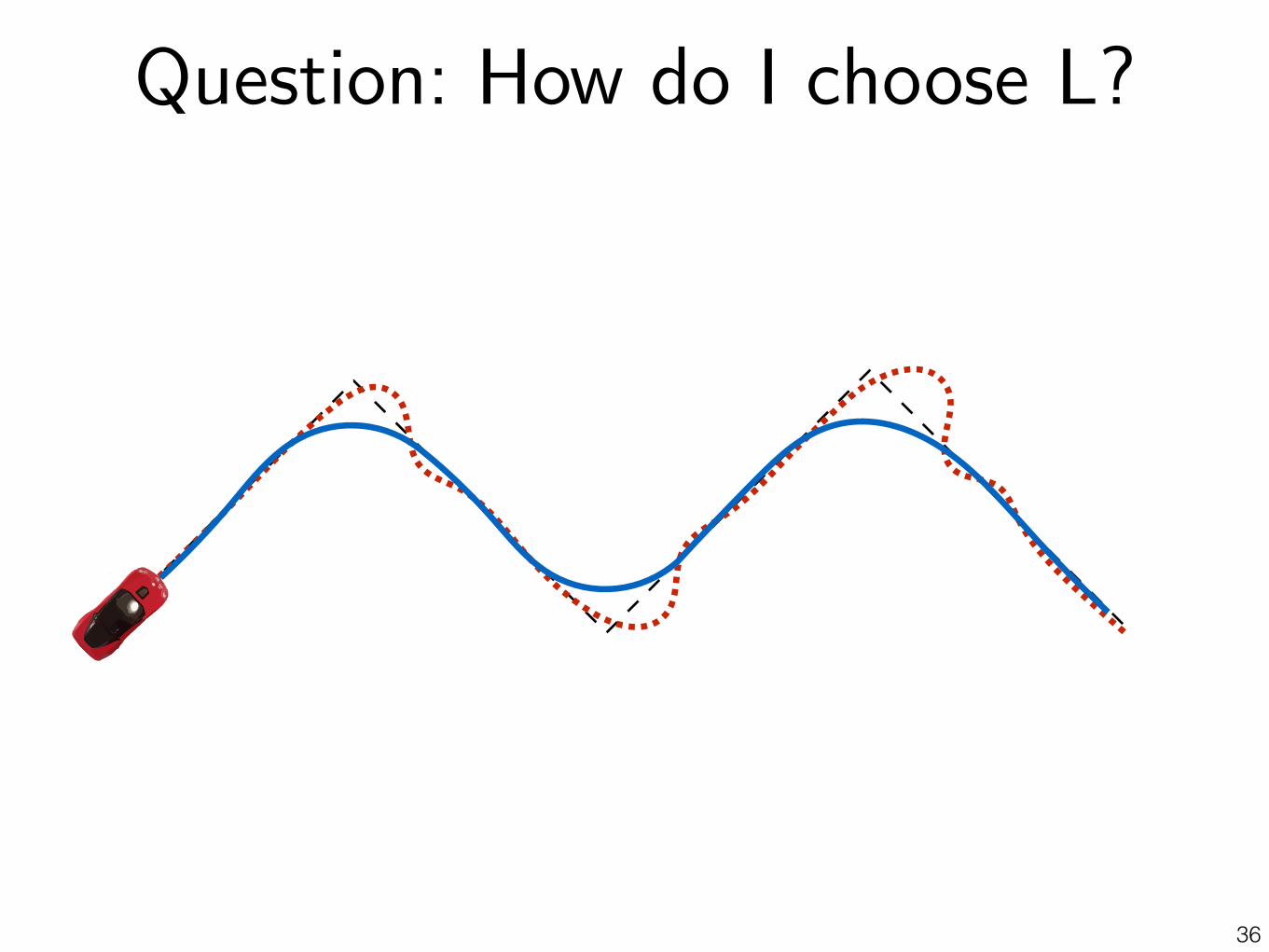
Question: How do I choose L?
36

Question: How do I choose L?
36
Question: How do I choose L?
36
Recommended

















